Lab on GNSS Signal Processing Part II
|
|
|
- Horace Harris
- 5 years ago
- Views:
Transcription

1 JRC SUMMERSCHOOL GNSS Lab on GNSS Signal Processing Part II Daniele Borio European Commission Joint Research Centre Davos, Switzerland, July 15-25, 2013
2 INTRODUCTION Second Part of the Lab: Introduction to tracking loops Summary of the tracking process o Basic functional blocks o Loop filter design (concept of loop order and bandwidth) The tracking loop script Exercise 1: Loop parameters 2
3 THE TRACKING PROCESS (RECAP) Acquisition: determine the signal presence and provide raw estimates of the signal parameters (code delay and Doppler frequency) Tracking: precisely estimate the signal parameters (code delay, Doppler frequency and carrier phase) and track their variations over time Use of two coupled loops: Delay Lock Loop (DLL) code Phase Lock Loop (PLL)* carrier Input signal Code wipe-off DLL PLL * a Frequency Lock Loop (FLL) could also be used Carrier wipe-off 3
4 TRACKING LOOPS: FUNCTIONAL BLOCKS All tracking loops share a common structure: r[ n] Input signal (to be read from the binary file) Update of the parameter to be estimated and signal replica generation Correlation 1 N n ( ) Local signal replica (Several signal replicas may be required) NCO Derivative of the parameter to be estimated Several correlators may be evaluated Non-Linear Discriminator Loop Filter Discriminator output 4
5 PLL: BASIC SCHEME The code has been removed using the local replica from the DLL Only 1 correlator: Prompt Extract the residual phase error r[ n] Input signal Correlation 1 N n ( ) Non-Linear Discriminator Complex Carrier replica Carrier NCO Loop Filter Discriminator output 5
6 DLL: BASIC SCHEME The carrier has been removed using the local replica from the PLL r[ n] Input signal 1 N n ( ) 1 N n ( ) 1 N n ( ) 3 correlators: Early, Prompt, Late Non-Linear Discriminator Extract the residual delay error Discriminator output Code NCO Loop Filter 6
7 LOOP DISCRIMINATOR It is the interface between the correlation and the parameter domain In the PLL case and in the absence of noise Prompt correlator P = Aexp{ j ϕ} Phase discriminator arctan I{ P} R{ P} Discriminator output ϕ Residual carrier phase error (this is not the carrier phase itself, but a correction with respect to the previous carrier phase estimate) In general, the discriminator output is an odd function of the residual parameter error ( ) ( 3 ϕ ϕ + ϕ ) D = f G O out odd d If the residual error is small, D out is approximately proportional to φ G d is the discriminator gain 7
8 LOOP FILTERS (I/II) Reduce the impact of noise on the discriminator output They are a linear combination of integrators of different orders (why?) ω 0 The number of integrators determine the order of the loop: 1st order loop: the loop filter is just a gain 2 ω 0 a2ω 0 1 s Analog integrator 2nd order loop: a single integrator is adopted The order determines the ability of the loop to cope with the signal dynamics From Kaplan E. D. and C.J. Hegarty (2006), Understanding GPS Principles and Applications, Artech House 8
9 LOOP FILTERS (II/II) In the digital domain, analog integrators are replaced by digital approximations For a third order loop: Recurrence relation implemented in the code H ( z) = a z + a z ( 1 z ) + a y[ n] = a x[ n 2] + a x[ n 1] + a x[ n] y[ n 1] y[ n 2] 3 ω 0 2 a3ω 0 1 s 1 s b3ω 0 9
10 TRACKING LOOP AS A FILTER A tracking loop can be approximated by an equivalent linear device (filter). The approximation is valid for small tracking errors, i.e., when the discriminator acts in its linear region Useful signal Noise Tracking loop - Equivalent filter Estimate of the signal parameter Noise The quantity of noise transferred from the input signal to the final estimate determines the loop bandwidth Coherent integration time B eq = 1 2T c σ σ 2 OUT 2 IN Variance of the output noise Variance of the input noise 10
11 LOOP BANDWIDTH The loop bandwidth is a property of the whole loop (not only of the loop filter) Narrow bandwidth: reduced output noise, difficulties in following the signal variations Wide bandwidth: higher output noise, suitable for high dynamic applications The loop bandwidth is controlled by the loop filter parameters and the discriminator gain Loop filter design formulas assume that the discriminator output has been normalized to 1 11
12 LOOP FILTER DESIGN FORMULAS Loop Order Noise Bandwidth B n (Hz) Typical Filter Values Steady State Error First ω 0 4 Bn = 0.25ω 0 Sensitive to velocity stress Second 2 ( 1 a 2 ) ω + 0 4a 2 B n a ω = 0.53 ω 0 = 1.414ω Sensitive to acceleration stress Third 2 2 ( a b a b ) ω ( a b ) B n b ω a ω = ω = 2. 4ω = 1. 1ω Sensitive to jerk stress From Kaplan E. D. and C.J. Hegarty (2006), Understanding GPS Principles and Applications, Artech House 12
13 STRUCTURE OF THE CODE Initialization Main processing loop: at each epoch 1 ms of data is read and processed Read 1 ms of data (1 code period) NCO: generate the local code and carrier Compute the 1 ms correlator outputs Is bit-synched? Yes Accumulate over 20 ms No Update the loop (Signal parameters) 13
14 INITIALIZATION Several variables and vectors are defined and initialized The main script ( mytracking.m ) computes a series of parameters (correlator outputs, code and carrier discriminator outputs, loop filter outputs, ). These values are stored in circular buffers. When the buffers are full, the values are dumped to file (writetodisk routine) Loop filter design: Generation of the local code (at the chipping rate, bi-polar form) 14
15 LOOP FILTER DESIGN The filter is implemented using the struct: (see SetLoopCoefficients ) Standard formulas (see slide 12) are used to set the loop coefficients The integration time (Tc) is used for the conversion between analog and digital integrators The LoopFilter struct is designed to easily perform the filtering operation: y[ n] = a x[ n 2] + a x[ n 1] + a x[ n] + 2 y[ n 1] y[ n 2] Filtering in implemented in LoopFilter 15
16 MAIN PROCESSING LOOP For each processing epoch Data Loading: same as in the acquisition script NCO: generate the local codes and carrier Integrate & Dump: the input samples are down-converted to baseband and integrated over the integration time, T c Discriminator and Filter Update If required: save the results to disk ( writetodisk ) 16
17 NCO OPERATIONS A tracking loop also estimates the code rate (~ output of the loop filter) Local codes need to be generated at the same rate as the incoming signal For each correlator define the time scale (in chips) and resample the local code (stored in the vector ca ) Propagate the delay of the local code (this is a form of integration) Do something similar for the local carrier 17


18 DISCRIMINATOR AND FILTER UPDATE All data are stored in circular buffer At each update, the index of the circular buffer needs to be updated Loop filters are memory devices Their memory needs to be updated 18

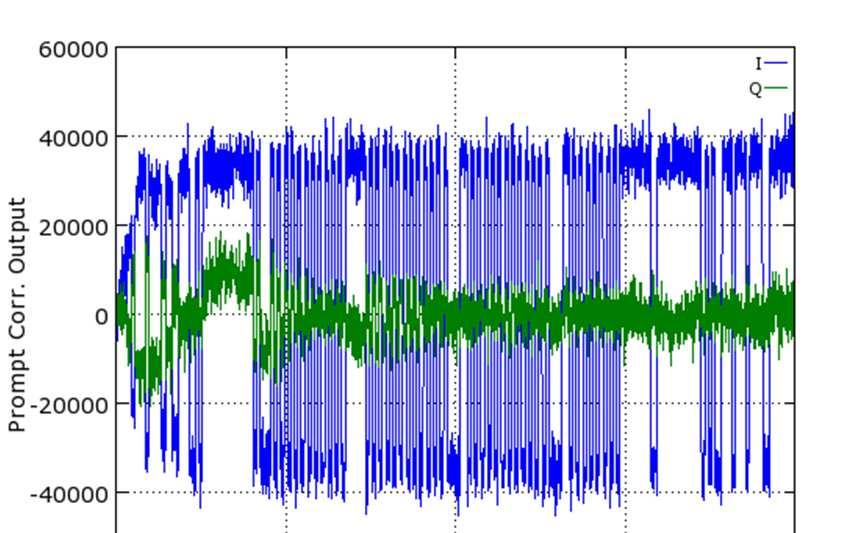
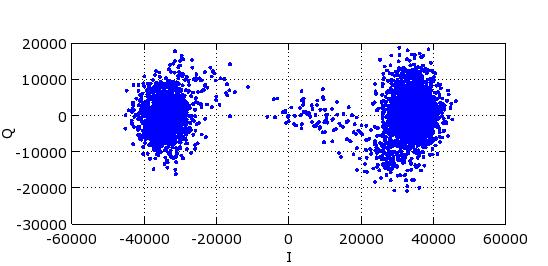
19 EXPECTED RESULTS 19
20 Loop Bandwidth and Order EXERCISE 1 Experiment with the different loop parameters and investigate the impact of the loop order and bandwidth on the tracking performance Suggestion: process the input signal using different parameters Plot the estimated Doppler on the same figure (modify the plotresults script) 20
Lab on GNSS Signal Processing Part I
 JRC SUMMERSCHOOL GNSS Lab on GNSS Signal Processing Part I Daniele Borio European Commission Joint Research Centre Davos, Switzerland, July 15-25, 2013 INTRODUCTION Goal of the lab: provide the students
JRC SUMMERSCHOOL GNSS Lab on GNSS Signal Processing Part I Daniele Borio European Commission Joint Research Centre Davos, Switzerland, July 15-25, 2013 INTRODUCTION Goal of the lab: provide the students
Satellite Navigation Principle and performance of GPS receivers
 Satellite Navigation Principle and performance of GPS receivers AE4E08 GPS Block IIF satellite Boeing North America Christian Tiberius Course 2010 2011, lecture 3 Today s topics Introduction basic idea
Satellite Navigation Principle and performance of GPS receivers AE4E08 GPS Block IIF satellite Boeing North America Christian Tiberius Course 2010 2011, lecture 3 Today s topics Introduction basic idea
Evaluation of the pseudorange performance by using software GPS receiver
 Journal of Global Positioning Systems (005) Vol. 4, No. 1-: 15- Evaluation of the pseudorange performance by using software GPS receiver Shun-Ichiro Kondo, Nobuaki Kubo and Akio Yasuda -1-6 Etchujima Koto-ku
Journal of Global Positioning Systems (005) Vol. 4, No. 1-: 15- Evaluation of the pseudorange performance by using software GPS receiver Shun-Ichiro Kondo, Nobuaki Kubo and Akio Yasuda -1-6 Etchujima Koto-ku
Utilizing Batch Processing for GNSS Signal Tracking
 Utilizing Batch Processing for GNSS Signal Tracking Andrey Soloviev Avionics Engineering Center, Ohio University Presented to: ION Alberta Section, Calgary, Canada February 27, 2007 Motivation: Outline
Utilizing Batch Processing for GNSS Signal Tracking Andrey Soloviev Avionics Engineering Center, Ohio University Presented to: ION Alberta Section, Calgary, Canada February 27, 2007 Motivation: Outline
GPS software receiver implementations
 GPS software receiver implementations OLEKSIY V. KORNIYENKO AND MOHAMMAD S. SHARAWI THIS ARTICLE PRESENTS A DETAILED description of the various modules needed for the implementation of a global positioning
GPS software receiver implementations OLEKSIY V. KORNIYENKO AND MOHAMMAD S. SHARAWI THIS ARTICLE PRESENTS A DETAILED description of the various modules needed for the implementation of a global positioning
Improved GPS Carrier Phase Tracking in Difficult Environments Using Vector Tracking Approach
 Improved GPS Carrier Phase Tracking in Difficult Environments Using Vector Tracking Approach Scott M. Martin David M. Bevly Auburn University GPS and Vehicle Dynamics Laboratory Presentation Overview Introduction
Improved GPS Carrier Phase Tracking in Difficult Environments Using Vector Tracking Approach Scott M. Martin David M. Bevly Auburn University GPS and Vehicle Dynamics Laboratory Presentation Overview Introduction
Evaluation of C/N 0 estimators performance for GNSS receivers
 International Conference and Exhibition The 14th IAIN Congress 2012 Seamless Navigation (Challenges & Opportunities) 01-03 October, 2012 - Cairo, Egypt Concorde EL Salam Hotel Evaluation of C/N 0 estimators
International Conference and Exhibition The 14th IAIN Congress 2012 Seamless Navigation (Challenges & Opportunities) 01-03 October, 2012 - Cairo, Egypt Concorde EL Salam Hotel Evaluation of C/N 0 estimators
Performance Study of FLL Schemes for a Successful Acquisition-to-Tracking Transition
 Performance Study of FLL Schemes for a Successful Acquisition-to-Tracking Transition Myriam Foucras, Bertrand Ekambi, Ulrich Ngayap, Jen Yu Li, Olivier Julien, Christophe Macabiau To cite this version:
Performance Study of FLL Schemes for a Successful Acquisition-to-Tracking Transition Myriam Foucras, Bertrand Ekambi, Ulrich Ngayap, Jen Yu Li, Olivier Julien, Christophe Macabiau To cite this version:
GNSS Technologies. GNSS Acquisition Dr. Zahidul Bhuiyan Finnish Geospatial Research Institute, National Land Survey
 GNSS Acquisition 25.1.2016 Dr. Zahidul Bhuiyan Finnish Geospatial Research Institute, National Land Survey Content GNSS signal background Binary phase shift keying (BPSK) modulation Binary offset carrier
GNSS Acquisition 25.1.2016 Dr. Zahidul Bhuiyan Finnish Geospatial Research Institute, National Land Survey Content GNSS signal background Binary phase shift keying (BPSK) modulation Binary offset carrier
SX-NSR 2.0 A Multi-frequency and Multi-sensor Software Receiver with a Quad-band RF Front End
 SX-NSR 2.0 A Multi-frequency and Multi-sensor Software Receiver with a Quad-band RF Front End - with its use for Reflectometry - N. Falk, T. Hartmann, H. Kern, B. Riedl, T. Pany, R. Wolf, J.Winkel, IFEN
SX-NSR 2.0 A Multi-frequency and Multi-sensor Software Receiver with a Quad-band RF Front End - with its use for Reflectometry - N. Falk, T. Hartmann, H. Kern, B. Riedl, T. Pany, R. Wolf, J.Winkel, IFEN
Design and Testing of an Intelligent GPS Tracking Loop for Noise Reduction and High Dynamics Applications
 Design and Testing of an Intelligent GPS Tracking Loop for Noise Reduction and High Dynamics Applications By: Ahmed M. Kamel Position, Location And Navigation (PLAN) Group Department of Geomatics Engineering
Design and Testing of an Intelligent GPS Tracking Loop for Noise Reduction and High Dynamics Applications By: Ahmed M. Kamel Position, Location And Navigation (PLAN) Group Department of Geomatics Engineering
How Effective Are Signal. Quality Monitoring Techniques
 How Effective Are Signal Quality Monitoring Techniques for GNSS Multipath Detection? istockphoto.com/ppampicture An analytical discussion on the sensitivity and effectiveness of signal quality monitoring
How Effective Are Signal Quality Monitoring Techniques for GNSS Multipath Detection? istockphoto.com/ppampicture An analytical discussion on the sensitivity and effectiveness of signal quality monitoring
THOMAS PANY SOFTWARE RECEIVERS
 TECHNOLOGY AND APPLICATIONS SERIES THOMAS PANY SOFTWARE RECEIVERS Contents Preface Acknowledgments xiii xvii Chapter 1 Radio Navigation Signals 1 1.1 Signal Generation 1 1.2 Signal Propagation 2 1.3 Signal
TECHNOLOGY AND APPLICATIONS SERIES THOMAS PANY SOFTWARE RECEIVERS Contents Preface Acknowledgments xiii xvii Chapter 1 Radio Navigation Signals 1 1.1 Signal Generation 1 1.2 Signal Propagation 2 1.3 Signal
Prototype Software-based Receiver for Remote Sensing using Reflected GPS Signals. Dinesh Manandhar The University of Tokyo
 Prototype Software-based Receiver for Remote Sensing using Reflected GPS Signals Dinesh Manandhar The University of Tokyo dinesh@qzss.org 1 Contents Background Remote Sensing Capability System Architecture
Prototype Software-based Receiver for Remote Sensing using Reflected GPS Signals Dinesh Manandhar The University of Tokyo dinesh@qzss.org 1 Contents Background Remote Sensing Capability System Architecture
Multipath mitigation performance of multi-correlator based code tracking algorithms in closed and open loop model
 Multipath mitigation performance of multi-correlator based code tracking algorithms in closed and open loop model Mohammad Zahidul H. Bhuiyan, Xuan Hu, Elena Simona Lohan, and Markku Renfors Department
Multipath mitigation performance of multi-correlator based code tracking algorithms in closed and open loop model Mohammad Zahidul H. Bhuiyan, Xuan Hu, Elena Simona Lohan, and Markku Renfors Department
Assessment of high-rate GPS using a single-axis shake table
 Assessment of high-rate GPS using a single-axis shake table S. Häberling, M. Rothacher, A. Geiger Institute of Geodesy and Photogrammetry, ETH Zurich Introduction Project: Study the applicability of high-rate
Assessment of high-rate GPS using a single-axis shake table S. Häberling, M. Rothacher, A. Geiger Institute of Geodesy and Photogrammetry, ETH Zurich Introduction Project: Study the applicability of high-rate
Decoding Galileo and Compass
 Decoding Galileo and Compass Grace Xingxin Gao The GPS Lab, Stanford University June 14, 2007 What is Galileo System? Global Navigation Satellite System built by European Union The first Galileo test satellite
Decoding Galileo and Compass Grace Xingxin Gao The GPS Lab, Stanford University June 14, 2007 What is Galileo System? Global Navigation Satellite System built by European Union The first Galileo test satellite
GNSS Doppler Positioning (An Overview)
") GNSS Doppler Positioning (An Overview) Mojtaba Bahrami Geomatics Lab. @ CEGE Dept. University College London A paper prepared for the GNSS SIG Technical Reading Group Friday, 29-Aug-2008 To be completed...
GNSS Doppler Positioning (An Overview) Mojtaba Bahrami Geomatics Lab. @ CEGE Dept. University College London A paper prepared for the GNSS SIG Technical Reading Group Friday, 29-Aug-2008 To be completed...
SPECTRAL SEPARATION COEFFICIENTS FOR DIGITAL GNSS RECEIVERS
 SPECTRAL SEPARATION COEFFICIENTS FOR DIGITAL GNSS RECEIVERS Daniele Borio, Letizia Lo Presti 2, and Paolo Mulassano 3 Dipartimento di Elettronica, Politecnico di Torino Corso Duca degli Abruzzi 24, 029,
SPECTRAL SEPARATION COEFFICIENTS FOR DIGITAL GNSS RECEIVERS Daniele Borio, Letizia Lo Presti 2, and Paolo Mulassano 3 Dipartimento di Elettronica, Politecnico di Torino Corso Duca degli Abruzzi 24, 029,
Analysis of Processing Parameters of GPS Signal Acquisition Scheme
 Analysis of Processing Parameters of GPS Signal Acquisition Scheme Prof. Vrushali Bhatt, Nithin Krishnan Department of Electronics and Telecommunication Thakur College of Engineering and Technology Mumbai-400101,
Analysis of Processing Parameters of GPS Signal Acquisition Scheme Prof. Vrushali Bhatt, Nithin Krishnan Department of Electronics and Telecommunication Thakur College of Engineering and Technology Mumbai-400101,
Research on DQPSK Carrier Synchronization based on FPGA
 Journal of Information Hiding and Multimedia Signal Processing c 27 ISSN 273-422 Ubiquitous International Volume 8, Number, January 27 Research on DQPSK Carrier Synchronization based on FPGA Shi-Jun Kang,
Journal of Information Hiding and Multimedia Signal Processing c 27 ISSN 273-422 Ubiquitous International Volume 8, Number, January 27 Research on DQPSK Carrier Synchronization based on FPGA Shi-Jun Kang,
Double Phase Estimator: New Results
 Double Phase Estimator: New Results Daniele Borio European Commission, Joint Research Centre (JRC), Institute for the Protection and Security of the Citizen (IPSC), Security Technology Assessment Unit,
Double Phase Estimator: New Results Daniele Borio European Commission, Joint Research Centre (JRC), Institute for the Protection and Security of the Citizen (IPSC), Security Technology Assessment Unit,
CDMA Mobile Radio Networks
 - 1 - CDMA Mobile Radio Networks Elvino S. Sousa Department of Electrical and Computer Engineering University of Toronto Canada ECE1543S - Spring 1999 - 2 - CONTENTS Basic principle of direct sequence
- 1 - CDMA Mobile Radio Networks Elvino S. Sousa Department of Electrical and Computer Engineering University of Toronto Canada ECE1543S - Spring 1999 - 2 - CONTENTS Basic principle of direct sequence
Lecture 11. Phase Locked Loop (PLL): Appendix C. EE4900/EE6720 Digital Communications
: Appendix C. EE4900/EE6720 Digital Communications") EE4900/EE6720: Digital Communications 1 Lecture 11 Phase Locked Loop (PLL): Appendix C Block Diagrams of Communication System Digital Communication System 2 Informatio n (sound, video, text, data, ) Transducer
EE4900/EE6720: Digital Communications 1 Lecture 11 Phase Locked Loop (PLL): Appendix C Block Diagrams of Communication System Digital Communication System 2 Informatio n (sound, video, text, data, ) Transducer
GPS receivers built for various
 GNSS Solutions: Measuring GNSS Signal Strength angelo joseph GNSS Solutions is a regular column featuring questions and answers about technical aspects of GNSS. Readers are invited to send their questions
GNSS Solutions: Measuring GNSS Signal Strength angelo joseph GNSS Solutions is a regular column featuring questions and answers about technical aspects of GNSS. Readers are invited to send their questions
Characterization of Carrier Phase Measurement Quality in Urban Environments
 Characterization of Carrier Phase Measurement Quality in Urban Environments Lina Deambrogio, Olivier Julien To cite this version: Lina Deambrogio, Olivier Julien. Characterization of Carrier Phase Measurement
Characterization of Carrier Phase Measurement Quality in Urban Environments Lina Deambrogio, Olivier Julien To cite this version: Lina Deambrogio, Olivier Julien. Characterization of Carrier Phase Measurement
The effect of sampling frequency and front-end bandwidth on the DLL code tracking performance
 International Global Navigation Satellite Systems Society IGNSS Symposium 2015 Colombo Theatres, Kensington Campus, UNSW Australia 6 8 December 2016 The effect of sampling frequency and front-end bandwidth
International Global Navigation Satellite Systems Society IGNSS Symposium 2015 Colombo Theatres, Kensington Campus, UNSW Australia 6 8 December 2016 The effect of sampling frequency and front-end bandwidth
Modulation (7): Constellation Diagrams
: Constellation Diagrams") Modulation (7): Constellation Diagrams Luiz DaSilva Professor of Telecommunications dasilval@tcd.ie +353-1-8963660 Adapted from material by Dr Nicola Marchetti Geometric representation of modulation signal
Modulation (7): Constellation Diagrams Luiz DaSilva Professor of Telecommunications dasilval@tcd.ie +353-1-8963660 Adapted from material by Dr Nicola Marchetti Geometric representation of modulation signal
HIGH GAIN ADVANCED GPS RECEIVER
 ABSTRACT HIGH GAIN ADVANCED GPS RECEIVER NAVSYS High Gain Advanced () uses a digital beam-steering antenna array to enable up to eight GPS satellites to be tracked, each with up to dbi of additional antenna
ABSTRACT HIGH GAIN ADVANCED GPS RECEIVER NAVSYS High Gain Advanced () uses a digital beam-steering antenna array to enable up to eight GPS satellites to be tracked, each with up to dbi of additional antenna
Correlators for L2C. Some Considerations
 Correlators for L2C Some Considerations Andrew dempster Lockheed Martin With the launch of the first modernized GPS Block IIR satellite in September 2006, GNSS product designers have an additional, fully
Correlators for L2C Some Considerations Andrew dempster Lockheed Martin With the launch of the first modernized GPS Block IIR satellite in September 2006, GNSS product designers have an additional, fully
Every GNSS receiver processes
 GNSS Solutions: Code Tracking & Pseudoranges GNSS Solutions is a regular column featuring questions and answers about technical aspects of GNSS. Readers are invited to send their questions to the columnist,
GNSS Solutions: Code Tracking & Pseudoranges GNSS Solutions is a regular column featuring questions and answers about technical aspects of GNSS. Readers are invited to send their questions to the columnist,
Multiple Reference Clock Generator
 A White Paper Presented by IPextreme Multiple Reference Clock Generator Digitial IP for Clock Synthesis August 2007 IPextreme, Inc. This paper explains the concept behind the Multiple Reference Clock Generator
A White Paper Presented by IPextreme Multiple Reference Clock Generator Digitial IP for Clock Synthesis August 2007 IPextreme, Inc. This paper explains the concept behind the Multiple Reference Clock Generator
Bouncing off Walls and Trees: Multipath Channel Modeling for Satellite Navigation from the Samples Point of View
 Bouncing off Walls and Trees: Multipath Channel Modeling for Satellite Navigation from the Samples Point of View F. M. Schubert German Aerospace Center (DLR) Institute for Communications and Navigation
Bouncing off Walls and Trees: Multipath Channel Modeling for Satellite Navigation from the Samples Point of View F. M. Schubert German Aerospace Center (DLR) Institute for Communications and Navigation
DESIGN AND IMPLEMENTATION OF INTEGRATED GLOBAL NAVIGATION SATELLITE SYSTEM (GNSS) RECEIVER. B.Tech Thesis Report
 RECEIVER. B.Tech Thesis Report") Indian Institute of Technology Jodhpur DESIGN AND IMPLEMENTATION OF INTEGRATED GLOBAL NAVIGATION SATELLITE SYSTEM (GNSS) RECEIVER B.Tech Thesis Report Submitted by Arun Balajee V, Aswin Suresh and Mahesh
Indian Institute of Technology Jodhpur DESIGN AND IMPLEMENTATION OF INTEGRATED GLOBAL NAVIGATION SATELLITE SYSTEM (GNSS) RECEIVER B.Tech Thesis Report Submitted by Arun Balajee V, Aswin Suresh and Mahesh
Syed Fairuz Syed Dardin 1, Vincent Calmettes 1, Benoit Priot 1, Jean-Yves Tourneret 2 1 ISAE, University of Toulouse, France
 Adaptive GNSS signal tracking techniques in the context of a deeply integrated GNSS/INS navigation system designed for tackling multipath in urban environment Syed Fairuz Syed Dardin 1, Vincent Calmettes
Adaptive GNSS signal tracking techniques in the context of a deeply integrated GNSS/INS navigation system designed for tackling multipath in urban environment Syed Fairuz Syed Dardin 1, Vincent Calmettes
Benefits of a Reconfigurable Software GNSS Receiver in Multipath Environment
 Journal of Global Positioning Systems (4) Vol. 3, No. 1-: 49-56 Benefits of a Reconfigurable Software GNSS Receiver in Multipath Environment Fabio Dovis, Marco Pini, Massimiliano Spelat Politecnico di
Journal of Global Positioning Systems (4) Vol. 3, No. 1-: 49-56 Benefits of a Reconfigurable Software GNSS Receiver in Multipath Environment Fabio Dovis, Marco Pini, Massimiliano Spelat Politecnico di
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists. International authors and editors
 We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,800 116,000 120M Open access books available International authors and editors Downloads Our
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,800 116,000 120M Open access books available International authors and editors Downloads Our
Modern global navigation satellite
 WORKING PAPERS Double Phase Estimator Towards a New Perception of the Subcarrier Component DANIELE BORIO EUROPEAN COMMISSION, JOINT RESEARCH CENTER (JRC) The subcarrier introduced in binary offset carrier
WORKING PAPERS Double Phase Estimator Towards a New Perception of the Subcarrier Component DANIELE BORIO EUROPEAN COMMISSION, JOINT RESEARCH CENTER (JRC) The subcarrier introduced in binary offset carrier
High-speed Serial Interface
 High-speed Serial Interface Lect. 9 PLL (Introduction) 1 Block diagram Where are we today? Serializer Tx Driver Channel Rx Equalizer Sampler Deserializer PLL Clock Recovery Tx Rx 2 Clock Clock: Timing
High-speed Serial Interface Lect. 9 PLL (Introduction) 1 Block diagram Where are we today? Serializer Tx Driver Channel Rx Equalizer Sampler Deserializer PLL Clock Recovery Tx Rx 2 Clock Clock: Timing
Galileo Ground Segment Reference Receiver Performance Characteristics
 Galileo Ground Segment Reference Receiver Performance Characteristics Neil Gerein NovAtel Inc. Calgary, Alberta, Canada neil.gerein@novatel.ca Co-Authors: Allan Manz, NovAtel Inc., Canada Michael Clayton,
Galileo Ground Segment Reference Receiver Performance Characteristics Neil Gerein NovAtel Inc. Calgary, Alberta, Canada neil.gerein@novatel.ca Co-Authors: Allan Manz, NovAtel Inc., Canada Michael Clayton,
Codeless Processing of BOC Modulated Signals
 Codeless Processing of BOC Modulated Signals Daniele Borio, Marco Rao, Cillian O Driscoll Abstract Advanced and unexpected applications are recently raising new interest in Global Navigation Satellite
Codeless Processing of BOC Modulated Signals Daniele Borio, Marco Rao, Cillian O Driscoll Abstract Advanced and unexpected applications are recently raising new interest in Global Navigation Satellite
A Slope-Based Multipath Estimation Technique for Mitigating Short-Delay Multipath in GNSS Receivers
 Copyright Notice c 2010 IEEE. Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works
Copyright Notice c 2010 IEEE. Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works
FMT Signal Options and Associated Receiver Architectures for GNSS
 FMT Signal Options and Associated Receiver Architectures for GNSS A. Garcia-Pena, O. Julien, C. Macabiau ENAC Toulouse, France A. Emmanuele, M. Luise Department of Information Engineering University of
FMT Signal Options and Associated Receiver Architectures for GNSS A. Garcia-Pena, O. Julien, C. Macabiau ENAC Toulouse, France A. Emmanuele, M. Luise Department of Information Engineering University of
The Galileo signal in space (SiS)
") GNSS Solutions: Galileo Open Service and weak signal acquisition GNSS Solutions is a regular column featuring questions and answers about technical aspects of GNSS. Readers are invited to send their questions
GNSS Solutions: Galileo Open Service and weak signal acquisition GNSS Solutions is a regular column featuring questions and answers about technical aspects of GNSS. Readers are invited to send their questions
LOW POWER GLOBAL NAVIGATION SATELLITE SYSTEM (GNSS) SIGNAL DETECTION AND PROCESSING
 SIGNAL DETECTION AND PROCESSING") LOW POWER GLOBAL NAVIGATION SATELLITE SYSTEM (GNSS) SIGNAL DETECTION AND PROCESSING Dennis M. Akos, Per-Ludvig Normark, Jeong-Taek Lee, Konstantin G. Gromov Stanford University James B. Y. Tsui, John Schamus
LOW POWER GLOBAL NAVIGATION SATELLITE SYSTEM (GNSS) SIGNAL DETECTION AND PROCESSING Dennis M. Akos, Per-Ludvig Normark, Jeong-Taek Lee, Konstantin G. Gromov Stanford University James B. Y. Tsui, John Schamus
Code-Subcarrier Smoothing for Code Ambiguity Mitigation
 Code-Subcarrier Smoothing for Code Ambiguity Mitigation Moisés Navarro-Gallardo, Gustavo López Risueño and Massimo Crisci European Space Agency, Noordwijk,1AZ, The Netherlands Gonzalo Seco-Granados Universitat
Code-Subcarrier Smoothing for Code Ambiguity Mitigation Moisés Navarro-Gallardo, Gustavo López Risueño and Massimo Crisci European Space Agency, Noordwijk,1AZ, The Netherlands Gonzalo Seco-Granados Universitat
Analysis on GNSS Receiver with the Principles of Signal and Information
 Analysis on GNSS Receiver with the Principles of Signal and Information Lishu Guo 1,2, Xuyou Li 1, Xiaoying Kong 2 1. College of Automation, Harbin Engineering University, Harbin, China 2. School of Computing
Analysis on GNSS Receiver with the Principles of Signal and Information Lishu Guo 1,2, Xuyou Li 1, Xiaoying Kong 2 1. College of Automation, Harbin Engineering University, Harbin, China 2. School of Computing
A METHOD OF SIDE-PEAK MITIGATION APPLIED TO BINARY OFFSET CARRIER MODULATED GNSS SIGNALS TRACKING APPLIED IN GNSS RECEIVERS
 VOL. 9, NO. 1, DECEMBER 14 ISSN 1819-668 6-14 Asian Research Publishing Network (ARPN). All rights reserved. A METHOD OF SIDE-PEAK MITIGATION APPLIED TO BINARY OFFSET CARRIER MODULATED GNSS SIGNALS TRACKING
VOL. 9, NO. 1, DECEMBER 14 ISSN 1819-668 6-14 Asian Research Publishing Network (ARPN). All rights reserved. A METHOD OF SIDE-PEAK MITIGATION APPLIED TO BINARY OFFSET CARRIER MODULATED GNSS SIGNALS TRACKING
WIRELESS COMMUNICATION TECHNOLOGIES (16:332:546) LECTURE 5 SMALL SCALE FADING
 LECTURE 5 SMALL SCALE FADING") WIRELESS COMMUNICATION TECHNOLOGIES (16:332:546) LECTURE 5 SMALL SCALE FADING Instructor: Dr. Narayan Mandayam Slides: SabarishVivek Sarathy A QUICK RECAP Why is there poor signal reception in urban clutters?
WIRELESS COMMUNICATION TECHNOLOGIES (16:332:546) LECTURE 5 SMALL SCALE FADING Instructor: Dr. Narayan Mandayam Slides: SabarishVivek Sarathy A QUICK RECAP Why is there poor signal reception in urban clutters?
Chapter 7 Single-Sideband Modulation (SSB) and Frequency Translation
 and Frequency Translation") Chapter 7 Single-Sideband Modulation (SSB) and Frequency Translation Contents Slide 1 Single-Sideband Modulation Slide 2 SSB by DSBSC-AM and Filtering Slide 3 SSB by DSBSC-AM and Filtering (cont.) Slide
Chapter 7 Single-Sideband Modulation (SSB) and Frequency Translation Contents Slide 1 Single-Sideband Modulation Slide 2 SSB by DSBSC-AM and Filtering Slide 3 SSB by DSBSC-AM and Filtering (cont.) Slide
Monitoring Station for GNSS and SBAS
 Monitoring Station for GNSS and SBAS Pavel Kovář, Czech Technical University in Prague Josef Špaček, Czech Technical University in Prague Libor Seidl, Czech Technical University in Prague Pavel Puričer,
Monitoring Station for GNSS and SBAS Pavel Kovář, Czech Technical University in Prague Josef Špaček, Czech Technical University in Prague Libor Seidl, Czech Technical University in Prague Pavel Puričer,
Vector tracking loops are a type
 GNSS Solutions: What are vector tracking loops, and what are their benefits and drawbacks? GNSS Solutions is a regular column featuring questions and answers about technical aspects of GNSS. Readers are
GNSS Solutions: What are vector tracking loops, and what are their benefits and drawbacks? GNSS Solutions is a regular column featuring questions and answers about technical aspects of GNSS. Readers are
Code and Carrier Phase Tracking Performance of a Future Galileo RTK Receiver
 Code and Carrier Phase Tracking Performance of a Future Galileo RTK Receiver Thomas Pany, Markus Irsigler, Bernd Eissfeller Institute of Geodesy and Navigation, University FAF Munich, Germany Jón Winkel
Code and Carrier Phase Tracking Performance of a Future Galileo RTK Receiver Thomas Pany, Markus Irsigler, Bernd Eissfeller Institute of Geodesy and Navigation, University FAF Munich, Germany Jón Winkel
Application Specific Instruction Processor Based Implementation of a GNSS Receiver on an FPGA
 Application Specific Instruction Processor Based Implementation of a GNSS Receiver on an FPGA G. Kappen, T. G. Noll RWTH Aachen University, Chair of Electrical Engineering and Computer Systems, Schinkelstr.
Application Specific Instruction Processor Based Implementation of a GNSS Receiver on an FPGA G. Kappen, T. G. Noll RWTH Aachen University, Chair of Electrical Engineering and Computer Systems, Schinkelstr.
Performance Improvement of Receivers Based on Ultra-Tight Integration in GNSS-Challenged Environments
 Sensors 013, 13, 16406-1643; doi:10.3390/s13116406 Article OPEN ACCESS sensors ISSN 144-80 www.mdpi.com/journal/sensors Performance Improvement of Receivers Based on Ultra-Tight Integration in GNSS-Challenged
Sensors 013, 13, 16406-1643; doi:10.3390/s13116406 Article OPEN ACCESS sensors ISSN 144-80 www.mdpi.com/journal/sensors Performance Improvement of Receivers Based on Ultra-Tight Integration in GNSS-Challenged
OPTIMAL DUAL FREQUENCY COMBINATION FOR GALILEO MASS MARKET RECEIVER BASEBAND
 Copyright Notice c 2009 IEEE. Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works
Copyright Notice c 2009 IEEE. Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works
Galileo E1 and E5a Link-Level Performances in Single and Multipath Channels
 Galileo E1 and E5a Link-Level Performances in Single and Multipath Channels Jie Zhang and Elena-Simona Lohan Tampere University of Technology, Korkeakoulunkatu 1, 3311 Tampere, Finland www.cs.tut.fi/tlt/pos
Galileo E1 and E5a Link-Level Performances in Single and Multipath Channels Jie Zhang and Elena-Simona Lohan Tampere University of Technology, Korkeakoulunkatu 1, 3311 Tampere, Finland www.cs.tut.fi/tlt/pos
Narrowband Data Transmission ASK/FSK
 Objectives Communication Systems II - Laboratory Experiment 9 Narrowband Data Transmission ASK/FSK To generate amplitude-shift keyed (ASK) and frequency-shift keyed (FSK) signals, study their properties,
Objectives Communication Systems II - Laboratory Experiment 9 Narrowband Data Transmission ASK/FSK To generate amplitude-shift keyed (ASK) and frequency-shift keyed (FSK) signals, study their properties,
UCGE Reports. Number Improving Tracking Performance of PLL in High Dynamic. Applications. Ping Lian. Department of Geomatics Engineering
 UCGE Reports Number 8 Department of Geomatics Engineering Improving Tracing Performance of PLL in High Dynamic Applications URL: http://www.geomatics.ucalgary.ca/lins/gradtheses.html by Ping Lian November
UCGE Reports Number 8 Department of Geomatics Engineering Improving Tracing Performance of PLL in High Dynamic Applications URL: http://www.geomatics.ucalgary.ca/lins/gradtheses.html by Ping Lian November
Orion-S GPS Receiver Software Validation
 Space Flight Technology, German Space Operations Center (GSOC) Deutsches Zentrum für Luft- und Raumfahrt (DLR) e.v. O. Montenbruck Doc. No. : GTN-TST-11 Version : 1.1 Date : July 9, 23 Document Title:
Space Flight Technology, German Space Operations Center (GSOC) Deutsches Zentrum für Luft- und Raumfahrt (DLR) e.v. O. Montenbruck Doc. No. : GTN-TST-11 Version : 1.1 Date : July 9, 23 Document Title:
GPS Basics. Using GPS signals to find where you are. Jonathan Olds
 GPS Basics Using GPS signals to find where you are Jonathan Olds jontio@i4free.co.nz http://jontio.zapto.org c Jonti 2015 Contents 1 GPS basics 1 1.1 GPS signal.............................. 1 1.2 What
GPS Basics Using GPS signals to find where you are Jonathan Olds jontio@i4free.co.nz http://jontio.zapto.org c Jonti 2015 Contents 1 GPS basics 1 1.1 GPS signal.............................. 1 1.2 What
Effect of Multipath on Code-Tracking Error Jitter of a Delay Locked Loop
 Effect of Multipath on Code-Tracking Error Jitter of a Delay Locked Loop Mariano Vergara, Felix Antreich, Michael Meurer German Aerospace Center (DLR), Germany BIOGRAPHY Mariano Vergara (IEEE M 09) received
Effect of Multipath on Code-Tracking Error Jitter of a Delay Locked Loop Mariano Vergara, Felix Antreich, Michael Meurer German Aerospace Center (DLR), Germany BIOGRAPHY Mariano Vergara (IEEE M 09) received
A Modular Re-programmable Digital Receiver Architecture
 A Modular Re-programmable Digital Receiver Architecture Eric Holm, Dr. Alison Brown, Richard Slosky, NAVSYS Corporation BIOGRAPHY Eric Holm is an Integrated Product Team leader for the Range and Tracking
A Modular Re-programmable Digital Receiver Architecture Eric Holm, Dr. Alison Brown, Richard Slosky, NAVSYS Corporation BIOGRAPHY Eric Holm is an Integrated Product Team leader for the Range and Tracking
GPS Receiver Autonomous Interference Detection
 GPS Receiver Autonomous Interference Detection Awele Ndili, Stanford University Dr. Per Enge, Stanford University Presented at the 998 IEEE Position, Location and Navigation Symposium - PLANS 98 Palm Springs,
GPS Receiver Autonomous Interference Detection Awele Ndili, Stanford University Dr. Per Enge, Stanford University Presented at the 998 IEEE Position, Location and Navigation Symposium - PLANS 98 Palm Springs,
Multi-Receiver Vector Tracking
 Multi-Receiver Vector Tracking Yuting Ng and Grace Xingxin Gao please feel free to view the.pptx version for the speaker notes Cutting-Edge Applications UAV formation flight remote sensing interference
Multi-Receiver Vector Tracking Yuting Ng and Grace Xingxin Gao please feel free to view the.pptx version for the speaker notes Cutting-Edge Applications UAV formation flight remote sensing interference
Difference Correlators Does Indoor Carrier Phase Tracking Allow Indoor RTK?
 working papers Difference Correlators Does Indoor Carrier Phase Tracking Allow Indoor RTK? Difference correlators represent effective means to remove signal dynamics from correlator values and to dramatically
working papers Difference Correlators Does Indoor Carrier Phase Tracking Allow Indoor RTK? Difference correlators represent effective means to remove signal dynamics from correlator values and to dramatically
SOFTWARE DEFINED RADIO
 SOFTWARE DEFINED RADIO USR SDR WORKSHOP, SEPTEMBER 2017 PROF. MARCELO SEGURA SESSION 3: PHASE AND FREQUENCY SYNCHRONIZATION 1 TUNNING Tuning, consist on selecting the right value for the LO and the appropriated
SOFTWARE DEFINED RADIO USR SDR WORKSHOP, SEPTEMBER 2017 PROF. MARCELO SEGURA SESSION 3: PHASE AND FREQUENCY SYNCHRONIZATION 1 TUNNING Tuning, consist on selecting the right value for the LO and the appropriated
USING THE GRANADA BIT-TRUE SIMULATOR TO ANALYSE THE EFFECT OF CODE DOPPLER SHIFT IN GALILEO E5 AND L1 RECEIVERS 1
 USING THE GRANADA BIT-TRUE SIMULATOR TO ANALYSE THE EFFECT OF CODE DOPPLER SHIFT IN GALILEO E5 AND L1 RECEIVERS 1 JOSÉ DIEZ (a), ANTONIO FERNÁNDEZ (a), DARIO FOSSATI (b), LIVIO MARRADI (b), VINCENT GABAGLIO
USING THE GRANADA BIT-TRUE SIMULATOR TO ANALYSE THE EFFECT OF CODE DOPPLER SHIFT IN GALILEO E5 AND L1 RECEIVERS 1 JOSÉ DIEZ (a), ANTONIO FERNÁNDEZ (a), DARIO FOSSATI (b), LIVIO MARRADI (b), VINCENT GABAGLIO
Real-Time Software Receiver Using Massively Parallel
 Real-Time Software Receiver Using Massively Parallel Processors for GPS Adaptive Antenna Array Processing Jiwon Seo, David De Lorenzo, Sherman Lo, Per Enge, Stanford University Yu-Hsuan Chen, National
Real-Time Software Receiver Using Massively Parallel Processors for GPS Adaptive Antenna Array Processing Jiwon Seo, David De Lorenzo, Sherman Lo, Per Enge, Stanford University Yu-Hsuan Chen, National
Clock Steering Using Frequency Estimates from Stand-alone GPS Receiver Carrier Phase Observations
 Clock Steering Using Frequency Estimates from Stand-alone GPS Receiver Carrier Phase Observations Edward Byrne 1, Thao Q. Nguyen 2, Lars Boehnke 1, Frank van Graas 3, and Samuel Stein 1 1 Symmetricom Corporation,
Clock Steering Using Frequency Estimates from Stand-alone GPS Receiver Carrier Phase Observations Edward Byrne 1, Thao Q. Nguyen 2, Lars Boehnke 1, Frank van Graas 3, and Samuel Stein 1 1 Symmetricom Corporation,
Pulse-Width Modulation (PWM)
") Pulse-Width Modulation (PWM) Modules: Integrate & Dump, Digital Utilities, Wideband True RMS Meter, Tuneable LPF, Audio Oscillator, Multiplier, Utilities, Noise Generator, Speech, Headphones. 0 Pre-Laboratory
Pulse-Width Modulation (PWM) Modules: Integrate & Dump, Digital Utilities, Wideband True RMS Meter, Tuneable LPF, Audio Oscillator, Multiplier, Utilities, Noise Generator, Speech, Headphones. 0 Pre-Laboratory
arxiv: v1 [physics.acc-ph] 23 Mar 2018
![arxiv: v1 [physics.acc-ph] 23 Mar 2018](/thumbs/96/128693379.jpg "arxiv: v1 [physics.acc-ph] 23 Mar 2018") LLRF SYSTEM FOR THE FERMILAB MUON G-2 AND MU2E PROJECTS P. Varghese, B. Chase Fermi National Accelerator Laboratory (FNAL), Batavia, IL 60510, USA arxiv:1803.08968v1 [physics.acc-ph] 23 Mar 2018 Abstract
LLRF SYSTEM FOR THE FERMILAB MUON G-2 AND MU2E PROJECTS P. Varghese, B. Chase Fermi National Accelerator Laboratory (FNAL), Batavia, IL 60510, USA arxiv:1803.08968v1 [physics.acc-ph] 23 Mar 2018 Abstract
Galileo Sensor Station Ground Reference Receiver Performance Characteristics
 Galileo Sensor Station Ground Reference Receiver Performance haracteristics Neil Gerein, NovAtel Inc. Allan Manz, NovAtel Inc. Michael layton, NovAtel Inc. Michael Olynik, NovAtel Inc. BIOGRAPHY Neil Gerein
Galileo Sensor Station Ground Reference Receiver Performance haracteristics Neil Gerein, NovAtel Inc. Allan Manz, NovAtel Inc. Michael layton, NovAtel Inc. Michael Olynik, NovAtel Inc. BIOGRAPHY Neil Gerein
A MODIFIED DIRECT-SEQUENCE SPREAD SPECTRUM MODULATION SCHEME FOR BURST TRANSMISSIONS. Bart Scheers and Vincent Le Nir
 A MODIFIED DIRECT-SEQUENCE SPREAD SPECTRUM MODULATION SCHEME FOR BURST TRANSMISSIONS Bart Scheers and Vincent Le Nir CISS Department Royal Military Academy RMA) Brussels, Belgium {bart.scheers, vincent.lenir}@rma.ac.be
A MODIFIED DIRECT-SEQUENCE SPREAD SPECTRUM MODULATION SCHEME FOR BURST TRANSMISSIONS Bart Scheers and Vincent Le Nir CISS Department Royal Military Academy RMA) Brussels, Belgium {bart.scheers, vincent.lenir}@rma.ac.be
GNSS Software Receiver for UAVs
 Downloaded from orbit.dtu.dk on: Jul 01, 2018 GNSS Software Receiver for UAVs Olesen, Daniel Haugård; Jakobsen, Jakob; von Benzon, Hans-Henrik; Knudsen, Per Published in: European Journal of Navigation
Downloaded from orbit.dtu.dk on: Jul 01, 2018 GNSS Software Receiver for UAVs Olesen, Daniel Haugård; Jakobsen, Jakob; von Benzon, Hans-Henrik; Knudsen, Per Published in: European Journal of Navigation
TEST RESULTS OF A HIGH GAIN ADVANCED GPS RECEIVER
 TEST RESULTS OF A HIGH GAIN ADVANCED GPS RECEIVER ABSTRACT Dr. Alison Brown, Randy Silva, Gengsheng Zhang,; NAVSYS Corporation. NAVSYS High Gain Advanced GPS Receiver () uses a digital beam-steering antenna
TEST RESULTS OF A HIGH GAIN ADVANCED GPS RECEIVER ABSTRACT Dr. Alison Brown, Randy Silva, Gengsheng Zhang,; NAVSYS Corporation. NAVSYS High Gain Advanced GPS Receiver () uses a digital beam-steering antenna
Jitter Measurements using Phase Noise Techniques
 Jitter Measurements using Phase Noise Techniques Agenda Jitter Review Time-Domain and Frequency-Domain Jitter Measurements Phase Noise Concept and Measurement Techniques Deriving Random and Deterministic
Jitter Measurements using Phase Noise Techniques Agenda Jitter Review Time-Domain and Frequency-Domain Jitter Measurements Phase Noise Concept and Measurement Techniques Deriving Random and Deterministic
PHASELOCK TECHNIQUES INTERSCIENCE. Third Edition. FLOYD M. GARDNER Consulting Engineer Palo Alto, California A JOHN WILEY & SONS, INC.
 PHASELOCK TECHNIQUES Third Edition FLOYD M. GARDNER Consulting Engineer Palo Alto, California INTERSCIENCE A JOHN WILEY & SONS, INC., PUBLICATION CONTENTS PREFACE NOTATION xvii xix 1 INTRODUCTION 1 1.1
PHASELOCK TECHNIQUES Third Edition FLOYD M. GARDNER Consulting Engineer Palo Alto, California INTERSCIENCE A JOHN WILEY & SONS, INC., PUBLICATION CONTENTS PREFACE NOTATION xvii xix 1 INTRODUCTION 1 1.1
REAL-TIME IMPLEMENTATION AND ANALYSIS OF CHIP SHAPE-BASED SOFTWARE DEFINED RECEIVER
 REAL-TIME IMPLEMENTATION AND ANALYSIS OF CHIP SHAPE-BASED SOFTWARE DEFINED RECEIVER Thesis Submitted to The School of Engineering of the UNIVERSITY OF DAYTON In Partial Fulfillment of the Requirements
REAL-TIME IMPLEMENTATION AND ANALYSIS OF CHIP SHAPE-BASED SOFTWARE DEFINED RECEIVER Thesis Submitted to The School of Engineering of the UNIVERSITY OF DAYTON In Partial Fulfillment of the Requirements
Spread Spectrum Techniques
 0 Spread Spectrum Techniques Contents 1 1. Overview 2. Pseudonoise Sequences 3. Direct Sequence Spread Spectrum Systems 4. Frequency Hopping Systems 5. Synchronization 6. Applications 2 1. Overview Basic
0 Spread Spectrum Techniques Contents 1 1. Overview 2. Pseudonoise Sequences 3. Direct Sequence Spread Spectrum Systems 4. Frequency Hopping Systems 5. Synchronization 6. Applications 2 1. Overview Basic
Exercise 2: FM Detection With a PLL
 Phase-Locked Loop Analog Communications Exercise 2: FM Detection With a PLL EXERCISE OBJECTIVE When you have completed this exercise, you will be able to explain how the phase detector s input frequencies
Phase-Locked Loop Analog Communications Exercise 2: FM Detection With a PLL EXERCISE OBJECTIVE When you have completed this exercise, you will be able to explain how the phase detector s input frequencies
Digital Communications over Fading Channel s
 over Fading Channel s Instructor: Prof. Dr. Noor M Khan Department of Electronic Engineering, Muhammad Ali Jinnah University, Islamabad Campus, Islamabad, PAKISTAN Ph: +9 (51) 111-878787, Ext. 19 (Office),
over Fading Channel s Instructor: Prof. Dr. Noor M Khan Department of Electronic Engineering, Muhammad Ali Jinnah University, Islamabad Campus, Islamabad, PAKISTAN Ph: +9 (51) 111-878787, Ext. 19 (Office),
Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions
 Table of Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions page xiii xix xx xxi xxv Part I GNSS: orbits, signals, and methods 1 GNSS ground
Table of Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions page xiii xix xx xxi xxv Part I GNSS: orbits, signals, and methods 1 GNSS ground
Signal Frequency Estimation Based on Kalman Filtering Method
 3 (6) DO:.5/ matecconf/6563 CCAE 6 Signal Frequency Estimation Based on Kalman Filtering Method Yandu LU, Di YAN and Haixin ZHENG Equipment Academy, 46 Beijing, China Abstract. n order to further improve
3 (6) DO:.5/ matecconf/6563 CCAE 6 Signal Frequency Estimation Based on Kalman Filtering Method Yandu LU, Di YAN and Haixin ZHENG Equipment Academy, 46 Beijing, China Abstract. n order to further improve
DEVELOPMENT OF Open Source COMPASS SDR
 1 P a g e DEVELOPMENT OF Open Source COMPASS SDR Submitted by:- JAY PRAKASH and Adarsh Khandelwal B Tech, Part IV Electronics Engineering, IIT (BHU) An OpenSource COMPASS/BEIDOU Software Defined Receiver
1 P a g e DEVELOPMENT OF Open Source COMPASS SDR Submitted by:- JAY PRAKASH and Adarsh Khandelwal B Tech, Part IV Electronics Engineering, IIT (BHU) An OpenSource COMPASS/BEIDOU Software Defined Receiver
Understanding GPS: Principles and Applications Second Edition
 Understanding GPS: Principles and Applications Second Edition Elliott Kaplan and Christopher Hegarty ISBN 1-58053-894-0 Approx. 680 pages Navtech Part #1024 This thoroughly updated second edition of an
Understanding GPS: Principles and Applications Second Edition Elliott Kaplan and Christopher Hegarty ISBN 1-58053-894-0 Approx. 680 pages Navtech Part #1024 This thoroughly updated second edition of an
GPS Receiver Architectures and Measurements
 GPS Receiver Architectures and Measurements MICHAEL S. BRAASCH, MEMBER, IEEE, AND A. J. VAN DIERENDONCK, SENIOR MEMBER, IEEE Invited Paper Although originally developed for the military, the Global Positioning
GPS Receiver Architectures and Measurements MICHAEL S. BRAASCH, MEMBER, IEEE, AND A. J. VAN DIERENDONCK, SENIOR MEMBER, IEEE Invited Paper Although originally developed for the military, the Global Positioning
Robust GPS Carrier Tracking Model Using Unscented Kalman Filter for a Dynamic Vehicular Communication Channel
 Received April 3, 2018, accepted May 1, 2018, date of publication May 8, 2018, date of current version June 5, 2018. Digital Object Identifier 10.1109/ACCESS.2018.2834470 Robust GPS Carrier Tracking Model
Received April 3, 2018, accepted May 1, 2018, date of publication May 8, 2018, date of current version June 5, 2018. Digital Object Identifier 10.1109/ACCESS.2018.2834470 Robust GPS Carrier Tracking Model
Communication Channels
 Communication Channels wires (PCB trace or conductor on IC) optical fiber (attenuation 4dB/km) broadcast TV (50 kw transmit) voice telephone line (under -9 dbm or 110 µw) walkie-talkie: 500 mw, 467 MHz
Communication Channels wires (PCB trace or conductor on IC) optical fiber (attenuation 4dB/km) broadcast TV (50 kw transmit) voice telephone line (under -9 dbm or 110 µw) walkie-talkie: 500 mw, 467 MHz
EENG473 Mobile Communications Module 3 : Week # (12) Mobile Radio Propagation: Small-Scale Path Loss
 Mobile Radio Propagation: Small-Scale Path Loss") EENG473 Mobile Communications Module 3 : Week # (12) Mobile Radio Propagation: Small-Scale Path Loss Introduction Small-scale fading is used to describe the rapid fluctuation of the amplitude of a radio
EENG473 Mobile Communications Module 3 : Week # (12) Mobile Radio Propagation: Small-Scale Path Loss Introduction Small-scale fading is used to describe the rapid fluctuation of the amplitude of a radio
Department of Electronics & Communication Engineering LAB MANUAL SUBJECT: DIGITAL COMMUNICATION LABORATORY [ECE324] (Branch: ECE)
![Department of Electronics & Communication Engineering LAB MANUAL SUBJECT: DIGITAL COMMUNICATION LABORATORY [ECE324] (Branch: ECE)](/thumbs/96/127341232.jpg "Department of Electronics & Communication Engineering LAB MANUAL SUBJECT: DIGITAL COMMUNICATION LABORATORY [ECE324] (Branch: ECE)") Department of Electronics & Communication Engineering LAB MANUAL SUBJECT: DIGITAL COMMUNICATION LABORATORY [ECE324] B.Tech Year 3 rd, Semester - 5 th (Branch: ECE) Version: 01 st August 2018 The LNM Institute
Department of Electronics & Communication Engineering LAB MANUAL SUBJECT: DIGITAL COMMUNICATION LABORATORY [ECE324] B.Tech Year 3 rd, Semester - 5 th (Branch: ECE) Version: 01 st August 2018 The LNM Institute
EE 460L University of Nevada, Las Vegas ECE Department
 EE 460L PREPARATION 1- ASK Amplitude shift keying - ASK - in the context of digital communications is a modulation process which imparts to a sinusoid two or more discrete amplitude levels. These are related
EE 460L PREPARATION 1- ASK Amplitude shift keying - ASK - in the context of digital communications is a modulation process which imparts to a sinusoid two or more discrete amplitude levels. These are related
3D-Map Aided Multipath Mitigation for Urban GNSS Positioning
 Summer School on GNSS 2014 Student Scholarship Award Workshop August 2, 2014 3D-Map Aided Multipath Mitigation for Urban GNSS Positioning I-Wen Chu National Cheng Kung University, Taiwan. Page 1 Outline
Summer School on GNSS 2014 Student Scholarship Award Workshop August 2, 2014 3D-Map Aided Multipath Mitigation for Urban GNSS Positioning I-Wen Chu National Cheng Kung University, Taiwan. Page 1 Outline
Comparison of low complexity C/N 0 estimators for GNSS signals affected by ionospheric scintillation
 omparison of low complexity /N estimators for GNSS signals affected by ionospheric scintillation José Marçal +, Fernando Nunes +, Fernando Sousa Instituto de Telecomunicações and IST + /ISEL e-mails: jose.marcal@ieee.org,
omparison of low complexity /N estimators for GNSS signals affected by ionospheric scintillation José Marçal +, Fernando Nunes +, Fernando Sousa Instituto de Telecomunicações and IST + /ISEL e-mails: jose.marcal@ieee.org,
QUESTION BANK SUBJECT: DIGITAL COMMUNICATION (15EC61)
") QUESTION BANK SUBJECT: DIGITAL COMMUNICATION (15EC61) Module 1 1. Explain Digital communication system with a neat block diagram. 2. What are the differences between digital and analog communication systems?
QUESTION BANK SUBJECT: DIGITAL COMMUNICATION (15EC61) Module 1 1. Explain Digital communication system with a neat block diagram. 2. What are the differences between digital and analog communication systems?
Second Workshop on Satellite Navigation Science and Technology for Africa April 2010
 2135-1 Second Workshop on Satellite Navigation Science and Technology for Africa 6-23 April 2010 GPS Receivers, Receiver Signals and Principals of Operation Phillip W. Ward NavWard Consultants Garland,
2135-1 Second Workshop on Satellite Navigation Science and Technology for Africa 6-23 April 2010 GPS Receivers, Receiver Signals and Principals of Operation Phillip W. Ward NavWard Consultants Garland,
A Digitally Configurable Receiver for Multi-Constellation GNSS
 Innovative Navigation using new GNSS SIGnals with Hybridised Technologies A Digitally Configurable Receiver for Multi-Constellation GNSS Westminster Contributors Prof. Izzet Kale Dr. Yacine Adane Dr. Alper
Innovative Navigation using new GNSS SIGnals with Hybridised Technologies A Digitally Configurable Receiver for Multi-Constellation GNSS Westminster Contributors Prof. Izzet Kale Dr. Yacine Adane Dr. Alper
Characterization of Signal Deformations for GPS and WAAS Satellites
 Characterization of Signal Deformations for GPS and WAAS Satellites Gabriel Wong, R. Eric Phelts, Todd Walter, Per Enge, Stanford University BIOGRAPHY Gabriel Wong is an Electrical Engineering Ph.D. candidate
Characterization of Signal Deformations for GPS and WAAS Satellites Gabriel Wong, R. Eric Phelts, Todd Walter, Per Enge, Stanford University BIOGRAPHY Gabriel Wong is an Electrical Engineering Ph.D. candidate
Acquisition and Tracking of IRNSS Receiver on MATLAB and Xilinx
 Acquisition and Tracking of IRNSS Receiver on MATLAB and Xilinx Kishan Y. Rathod 1, Dr. Rajendra D. Patel 2, Amit Chorasiya 3 1 M.E Student / Marwadi Education Foundation s Groups of Institute 2 Accociat
Acquisition and Tracking of IRNSS Receiver on MATLAB and Xilinx Kishan Y. Rathod 1, Dr. Rajendra D. Patel 2, Amit Chorasiya 3 1 M.E Student / Marwadi Education Foundation s Groups of Institute 2 Accociat
The Influence of Multipath on the Positioning Error
 The Influence of Multipath on the Positioning Error Andreas Lehner German Aerospace Center Münchnerstraße 20 D-82230 Weßling, Germany andreas.lehner@dlr.de Co-Authors: Alexander Steingaß, German Aerospace
The Influence of Multipath on the Positioning Error Andreas Lehner German Aerospace Center Münchnerstraße 20 D-82230 Weßling, Germany andreas.lehner@dlr.de Co-Authors: Alexander Steingaß, German Aerospace