Optimal Motion Planning of a Space Robot with Base Disturbance Minimization
|
|
|
- Damian Thomas
- 5 years ago
- Views:
Transcription





1 Optimal Motion Planning of a Space Robot with Base Disturbance Minimization Authors: Eric Kaigom, Thomas Jung, Jürgen Rossmann Institute forman MachineInteraction, RWTH Aachen University 1



2 Virtualize Robotic Applicationsto spare PhysicalPrototypes Virtualization is a key technology in Modern Computer Centers Electronic Hardware Development Aerodynamics etc. 2



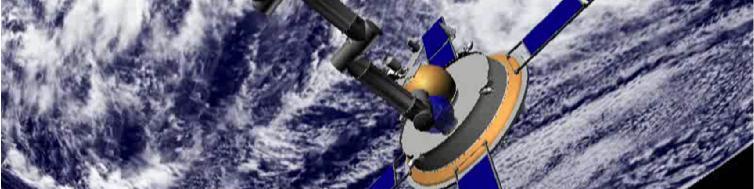
3 The first Virtual Testbed : The International Space Station 3



4 The first Virtual Testbed : The International Space Station 4



5 delivered the key ideas 5


6 in practical applications! 6



7 Glueing in a Virtual Testbed for Planetary Landing 7
8 What is a Virtual Testbed? More than one process type must be simulated within the same virtual world/testbed Inverse kinematics, rigid body simulation, terra mechanics, sensors, mechatronics, hydraulics, pneumatics, aerodynamics, geo data, fire and water propagation, etc. Glueing strategies needed to connect the results Complex environments become part of the simulation models Large world models, multiple interacting agents, streaming, etc. Flat file storage replaced by world model databases Modeling capabilities must keep up with complexity Support of advanced metaphors Computational power increases through multi core processors Testbed must exploit parallelism Multi-threaded rendering Multi-threaded simulation Basic challenge: Design the structure of a world simulator 8

9 Application -Orbital Servicing usingspace Robots Assembling Inspection 7-DoF Manipulator Space Robot Base Repair Upgrade Satellite Refueling Maintainance De-Orbiting Capture 9

10 Motivation Newton s Law in Space 10
11 Motion Planning -Reactionless Joint Velocity Conditionfor reactionlessjointvelocity Space robotat rest at the beginningandat the end ofits motion Noexternal forcesandmomentumsactingon thespace robot Reactionless velocity profiles givenas: The reactionlessvelocityprofilesdepend on thecurrentdynamic propertiesofthe spacerobot,because: 11
12 Motion Planning -Feasible Trajectories at Velocity Level Reactionlessvelocity: Null spacebase: Feasibletrajectories: 12
13 Motion Planning -Trajectory Parameterisation Polynomialtime-varyinginputs: Boundaryconditionsatthe startandtheend of the motion: The motionplanningproblem: Find is reachedat the end ofthemotion such that thedesired TCP-pose 13
14 The Constrained Particle Swarm Optimization (C-PSO) Noneedof gradient-information, only acostfunctionisrequired The optimizationvectorsexplore thesolutionspace usingthe followingscheme: ConstrainedPSO: Only those optimizationvectorsrespectingthe jointpositionbounds areretainedaspossible solutionofthe motionplanning problem 14


15 Simulation Results Approach without Base Disturbance 15


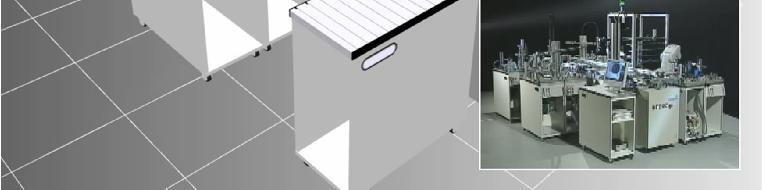
16 Technology Transfer: Virtual Testbedfor ProductionEngineering 16
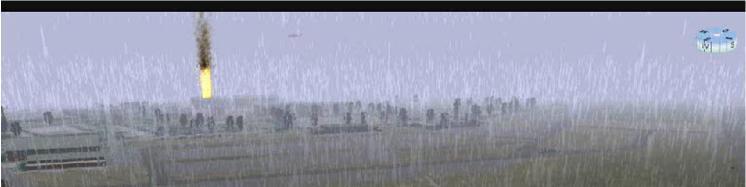


17 Interaction between Aerodynamics, Water and Fire 17



18 A Virtual Testbed in the woods : Driver training 18



19 Virtual Testbed: Bulk solids simulation 19



20 Interactive tests in a Virtual Testbed 20
21 Metaphors tovisualize motor torques and contact forces 21



22 A Virtual Testbed for thephysicalplanetary LandingMockup 22
23 Space technology is themotor for terrestrialvirtual Testbeds Virtual Production Virtual Forest Working Machines Projective Virtual Reality Geovisualization Virtual Construction Site 23
24 Conclusion The proposedalgorithm: Exploitthe ReactionNull Space andpolynomialtime-varying inputstosteerthe manipulatorofa spacerobottoa targetpose The base disturbanceduringthe approachwas minimized The C-PSO delivers theoptimizedjointtrajectories The virtualization approachissuccesful: Virtual Testbeds are a key concept to face the challenges of research and engineering tasks in complex environments. Important process simulation components are already integrated (actuator dynamics, sensors, control, co-simulation, etc. ) Optimization techniques can readily be applied to the virtualized robotic applications and thus spares physical prototypes 24
Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit
 www.dlr.de Chart 1 Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit Steffen Jaekel, R. Lampariello, G. Panin, M. Sagardia, B. Brunner, O. Porges, and E. Kraemer (1) M. Wieser,
www.dlr.de Chart 1 Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit Steffen Jaekel, R. Lampariello, G. Panin, M. Sagardia, B. Brunner, O. Porges, and E. Kraemer (1) M. Wieser,
Robotic System Simulation and Modeling Stefan Jörg Robotic and Mechatronic Center
 Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Tool Chains for Simulation and Experimental Validation of Orbital Robotic Technologies
 DLR.de Chart 1 > The Next Generation of Space Robotic Servicing Technologies > Ch. Borst Exploration of Orbital Robotic Technologies > 26.05.2015 Tool Chains for Simulation and Experimental Validation
DLR.de Chart 1 > The Next Generation of Space Robotic Servicing Technologies > Ch. Borst Exploration of Orbital Robotic Technologies > 26.05.2015 Tool Chains for Simulation and Experimental Validation
The DLR On-Orbit Servicing Testbed
 The DLR On-Orbit Servicing Testbed J. Artigas, R. Lampariello, B. Brunner, M. Stelzer, C. Borst, K. Landzettel, G. Hirzinger, A. Albu-Schäffer Robotics and Mechatronics Center, DLR VR-OOS Workshop 2012
The DLR On-Orbit Servicing Testbed J. Artigas, R. Lampariello, B. Brunner, M. Stelzer, C. Borst, K. Landzettel, G. Hirzinger, A. Albu-Schäffer Robotics and Mechatronics Center, DLR VR-OOS Workshop 2012
Robot Motion Planning
 Robot Motion Planning Dinesh Manocha dm@cs.unc.edu The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL Robots are used everywhere HRP4C humanoid Swarm robots da vinci Big dog MEMS bugs Snake robot 2 The UNIVERSITY
Robot Motion Planning Dinesh Manocha dm@cs.unc.edu The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL Robots are used everywhere HRP4C humanoid Swarm robots da vinci Big dog MEMS bugs Snake robot 2 The UNIVERSITY
IVR: Introduction to Control
 IVR: Introduction to Control OVERVIEW Control systems Transformations Simple control algorithms History of control Centrifugal governor M. Boulton and J. Watt (1788) J. C. Maxwell (1868) On Governors.
IVR: Introduction to Control OVERVIEW Control systems Transformations Simple control algorithms History of control Centrifugal governor M. Boulton and J. Watt (1788) J. C. Maxwell (1868) On Governors.
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (6 pts )A 2-DOF manipulator arm is attached to a mobile base with non-holonomic
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (6 pts )A 2-DOF manipulator arm is attached to a mobile base with non-holonomic
Mekanisme Robot - 3 SKS (Robot Mechanism)
") Mekanisme Robot - 3 SKS (Robot Mechanism) Latifah Nurahmi, PhD!! latifah.nurahmi@gmail.com!! C.250 First Term - 2016/2017 Velocity Rate of change of position and orientation with respect to time Linear
Mekanisme Robot - 3 SKS (Robot Mechanism) Latifah Nurahmi, PhD!! latifah.nurahmi@gmail.com!! C.250 First Term - 2016/2017 Velocity Rate of change of position and orientation with respect to time Linear
PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES
 Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Modeling and Experimental Studies of a Novel 6DOF Haptic Device
 Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
FUNDAMENTALS ROBOT TECHNOLOGY. An Introduction to Industrial Robots, T eleoperators and Robot Vehicles. D J Todd. Kogan Page
 FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Skyworker: A Robot for Assembly, Inspection and Maintenance of Large Scale Orbital Facilities
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Skyworker: A Robot for Assembly, Inspection and Maintenance of Large Scale Orbital Facilities
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Skyworker: A Robot for Assembly, Inspection and Maintenance of Large Scale Orbital Facilities
Team Description Paper: Darmstadt Dribblers & Hajime Team (KidSize) and Darmstadt Dribblers (TeenSize)
 and Darmstadt Dribblers (TeenSize)") Team Description Paper: Darmstadt Dribblers & Hajime Team (KidSize) and Darmstadt Dribblers (TeenSize) Martin Friedmann 1, Jutta Kiener 1, Robert Kratz 1, Sebastian Petters 1, Hajime Sakamoto 2, Maximilian
Team Description Paper: Darmstadt Dribblers & Hajime Team (KidSize) and Darmstadt Dribblers (TeenSize) Martin Friedmann 1, Jutta Kiener 1, Robert Kratz 1, Sebastian Petters 1, Hajime Sakamoto 2, Maximilian
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Peter Berkelman. ACHI/DigitalWorld
 Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
Robotics 2 Collision detection and robot reaction
 Robotics 2 Collision detection and robot reaction Prof. Alessandro De Luca Handling of robot collisions! safety in physical Human-Robot Interaction (phri)! robot dependability (i.e., beyond reliability)!
Robotics 2 Collision detection and robot reaction Prof. Alessandro De Luca Handling of robot collisions! safety in physical Human-Robot Interaction (phri)! robot dependability (i.e., beyond reliability)!
IOSR Journal of Engineering (IOSRJEN) e-issn: , p-issn: , Volume 2, Issue 11 (November 2012), PP 37-43
 e-issn: , p-issn: , Volume 2, Issue 11 (November 2012), PP 37-43") IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719, Volume 2, Issue 11 (November 2012), PP 37-43 Operative Precept of robotic arm expending Haptic Virtual System Arnab Das 1, Swagat
IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719, Volume 2, Issue 11 (November 2012), PP 37-43 Operative Precept of robotic arm expending Haptic Virtual System Arnab Das 1, Swagat
Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO
 Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO Weimin Huang 1, Tao Yang 1, Liang Jing Yang 2, Chee Kong Chui 2, Jimmy Liu 1, Jiayin Zhou 1, Jing Zhang 1, Yi Su 3, Stephen
Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO Weimin Huang 1, Tao Yang 1, Liang Jing Yang 2, Chee Kong Chui 2, Jimmy Liu 1, Jiayin Zhou 1, Jing Zhang 1, Yi Su 3, Stephen
Parallel Robot Projects at Ohio University
 Parallel Robot Projects at Ohio University Robert L. Williams II with graduate students: John Hall, Brian Hopkins, Atul Joshi, Josh Collins, Jigar Vadia, Dana Poling, and Ron Nyzen And Special Thanks to:
Parallel Robot Projects at Ohio University Robert L. Williams II with graduate students: John Hall, Brian Hopkins, Atul Joshi, Josh Collins, Jigar Vadia, Dana Poling, and Ron Nyzen And Special Thanks to:
Design and Control of the BUAA Four-Fingered Hand
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
All theses offered at MERLIN (November 2017)
") All theses offered at MERLIN (November 2017) MSc theses at Politecnico di Milano Thesis with reviewer Thesis without reviewer ( tesina ) Expected effort 6 months full time 3 4 months full time Reviewer
All theses offered at MERLIN (November 2017) MSc theses at Politecnico di Milano Thesis with reviewer Thesis without reviewer ( tesina ) Expected effort 6 months full time 3 4 months full time Reviewer
Automation & Robotics (A&R) for Space Applications in the German Space Program
 for Space Applications in the German Space Program") B. Sommer, RD-RR 1 Automation & Robotics (A&R) for Space Applications in the German Space Program ASTRA 2002 ESTEC, November 2002 1 2 Current and future application areas Unmanned exploration of the cold
B. Sommer, RD-RR 1 Automation & Robotics (A&R) for Space Applications in the German Space Program ASTRA 2002 ESTEC, November 2002 1 2 Current and future application areas Unmanned exploration of the cold
Dynamic analysis and control of a Hybrid serial/cable driven robot for lower-limb rehabilitation
 Dynamic analysis and control of a Hybrid serial/cable driven robot for lower-limb rehabilitation M. Ismail 1, S. Lahouar 2 and L. Romdhane 1,3 1 Mechanical Laboratory of Sousse (LMS), National Engineering
Dynamic analysis and control of a Hybrid serial/cable driven robot for lower-limb rehabilitation M. Ismail 1, S. Lahouar 2 and L. Romdhane 1,3 1 Mechanical Laboratory of Sousse (LMS), National Engineering
A simple embedded stereoscopic vision system for an autonomous rover
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 A simple embedded stereoscopic vision
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 A simple embedded stereoscopic vision
Robotics. In Textile Industry: Global Scenario
 Robotics In Textile Industry: A Global Scenario By: M.Parthiban & G.Mahaalingam Abstract Robotics In Textile Industry - A Global Scenario By: M.Parthiban & G.Mahaalingam, Faculty of Textiles,, SSM College
Robotics In Textile Industry: A Global Scenario By: M.Parthiban & G.Mahaalingam Abstract Robotics In Textile Industry - A Global Scenario By: M.Parthiban & G.Mahaalingam, Faculty of Textiles,, SSM College
Leveraging Simulation to Create Better Software Systems in an Agile World. Jason Ard Kristine Davidsen 4/8/2013
 Leveraging Simulation to Create Better Software Systems in an Agile World Jason Ard Kristine Davidsen 4/8/2013 Copyright 2013 Raytheon Company. All rights reserved. Customer Success Is Our Mission is a
Leveraging Simulation to Create Better Software Systems in an Agile World Jason Ard Kristine Davidsen 4/8/2013 Copyright 2013 Raytheon Company. All rights reserved. Customer Success Is Our Mission is a
NAVIGATION OF MOBILE ROBOTS
 MOBILE ROBOTICS course NAVIGATION OF MOBILE ROBOTS Maria Isabel Ribeiro Pedro Lima mir@isr.ist.utl.pt pal@isr.ist.utl.pt Instituto Superior Técnico (IST) Instituto de Sistemas e Robótica (ISR) Av.Rovisco
MOBILE ROBOTICS course NAVIGATION OF MOBILE ROBOTS Maria Isabel Ribeiro Pedro Lima mir@isr.ist.utl.pt pal@isr.ist.utl.pt Instituto Superior Técnico (IST) Instituto de Sistemas e Robótica (ISR) Av.Rovisco
Telematic Control and Communication with Industrial Robot over Ethernet Network
 Telematic Control and Communication with Industrial Robot over Ethernet Network M.W. Abdullah*, H. Roth, J. Wahrburg Institute of Automatic Control Engineering University of Siegen Siegen, Germany *abdullah@zess.uni-siegen.de
Telematic Control and Communication with Industrial Robot over Ethernet Network M.W. Abdullah*, H. Roth, J. Wahrburg Institute of Automatic Control Engineering University of Siegen Siegen, Germany *abdullah@zess.uni-siegen.de
Congress Best Paper Award
 Congress Best Paper Award Preprints of the 3rd IFAC Conference on Mechatronic Systems - Mechatronics 2004, 6-8 September 2004, Sydney, Australia, pp.547-552. OPTO-MECHATRONIC IMAE STABILIZATION FOR A COMPACT
Congress Best Paper Award Preprints of the 3rd IFAC Conference on Mechatronic Systems - Mechatronics 2004, 6-8 September 2004, Sydney, Australia, pp.547-552. OPTO-MECHATRONIC IMAE STABILIZATION FOR A COMPACT
Push Path Improvement with Policy based Reinforcement Learning
 1 Push Path Improvement with Policy based Reinforcement Learning Junhu He TAMS Department of Informatics University of Hamburg Cross-modal Interaction In Natural and Artificial Cognitive Systems (CINACS)
1 Push Path Improvement with Policy based Reinforcement Learning Junhu He TAMS Department of Informatics University of Hamburg Cross-modal Interaction In Natural and Artificial Cognitive Systems (CINACS)
MATLAB is a high-level programming language, extensively
 1 KUKA Sunrise Toolbox: Interfacing Collaborative Robots with MATLAB Mohammad Safeea and Pedro Neto Abstract Collaborative robots are increasingly present in our lives. The KUKA LBR iiwa equipped with
1 KUKA Sunrise Toolbox: Interfacing Collaborative Robots with MATLAB Mohammad Safeea and Pedro Neto Abstract Collaborative robots are increasingly present in our lives. The KUKA LBR iiwa equipped with
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
Development of a Laboratory Kit for Robotics Engineering Education
 Development of a Laboratory Kit for Robotics Engineering Education Taskin Padir, William Michalson, Greg Fischer, Gary Pollice Worcester Polytechnic Institute Robotics Engineering Program tpadir@wpi.edu
Development of a Laboratory Kit for Robotics Engineering Education Taskin Padir, William Michalson, Greg Fischer, Gary Pollice Worcester Polytechnic Institute Robotics Engineering Program tpadir@wpi.edu
JEPPIAAR ENGINEERING COLLEGE
 JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
Combot: Compliant Climbing Robotic Platform with Transitioning Capability and Payload Capacity
 2012 IEEE International Conference on Robotics and Automation RiverCentre, Saint Paul, Minnesota, USA May 14-18, 2012 Combot: Compliant Climbing Robotic Platform with Transitioning Capability and Payload
2012 IEEE International Conference on Robotics and Automation RiverCentre, Saint Paul, Minnesota, USA May 14-18, 2012 Combot: Compliant Climbing Robotic Platform with Transitioning Capability and Payload
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Nonholonomic Haptic Display
 Nonholonomic Haptic Display J. Edward Colgate Michael A. Peshkin Witaya Wannasuphoprasit Department of Mechanical Engineering Northwestern University Evanston, IL 60208-3111 Abstract Conventional approaches
Nonholonomic Haptic Display J. Edward Colgate Michael A. Peshkin Witaya Wannasuphoprasit Department of Mechanical Engineering Northwestern University Evanston, IL 60208-3111 Abstract Conventional approaches
II. ROBOT SYSTEMS ENGINEERING
 Mobile Robots: Successes and Challenges in Artificial Intelligence Jitendra Joshi (Research Scholar), Keshav Dev Gupta (Assistant Professor), Nidhi Sharma (Assistant Professor), Kinnari Jangid (Assistant
Mobile Robots: Successes and Challenges in Artificial Intelligence Jitendra Joshi (Research Scholar), Keshav Dev Gupta (Assistant Professor), Nidhi Sharma (Assistant Professor), Kinnari Jangid (Assistant
Design and Control of an Anthropomorphic Robotic Arm
 Journal Of Industrial Engineering Research ISSN- 2077-4559 Journal home page: http://www.iwnest.com/ijer/ 2016. 2(1): 1-8 RSEARCH ARTICLE Design and Control of an Anthropomorphic Robotic Arm Simon A/L
Journal Of Industrial Engineering Research ISSN- 2077-4559 Journal home page: http://www.iwnest.com/ijer/ 2016. 2(1): 1-8 RSEARCH ARTICLE Design and Control of an Anthropomorphic Robotic Arm Simon A/L
A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing
 A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing Robin Wolff German Aerospace Center (DLR), Germany Slide 1 Outline! Motivation!
A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing Robin Wolff German Aerospace Center (DLR), Germany Slide 1 Outline! Motivation!
ROBOT DESIGN AND DIGITAL CONTROL
 Revista Mecanisme şi Manipulatoare Vol. 5, Nr. 1, 2006, pp. 57-62 ARoTMM - IFToMM ROBOT DESIGN AND DIGITAL CONTROL Ovidiu ANTONESCU Lecturer dr. ing., University Politehnica of Bucharest, Mechanism and
Revista Mecanisme şi Manipulatoare Vol. 5, Nr. 1, 2006, pp. 57-62 ARoTMM - IFToMM ROBOT DESIGN AND DIGITAL CONTROL Ovidiu ANTONESCU Lecturer dr. ing., University Politehnica of Bucharest, Mechanism and
FLL Robot Design Workshop
 FLL Robot Design Workshop Tool Design and Mechanism Prepared by Dr. C. H. (Tony) Lin Principal Engineer Tire and Vehicle Mechanics Goodyear Tire & Rubber Company tony_lin@goodyear.com Description Mechanism
FLL Robot Design Workshop Tool Design and Mechanism Prepared by Dr. C. H. (Tony) Lin Principal Engineer Tire and Vehicle Mechanics Goodyear Tire & Rubber Company tony_lin@goodyear.com Description Mechanism
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
The safe & productive robot working without fences
 The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The safe & productive robot working without fences Final Presentation, Stuttgart, May 5 th, 2009 Objectives
The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The safe & productive robot working without fences Final Presentation, Stuttgart, May 5 th, 2009 Objectives
NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION
 Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators. Roberto De Vecchi VI-grade Enrico Busto - AddFor
 ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
Motion Control of Excavator with Tele-Operated System
 26th International Symposium on Automation and Robotics in Construction (ISARC 2009) Motion Control of Excavator with Tele-Operated System Dongnam Kim 1, Kyeong Won Oh 2, Daehie Hong 3#, Yoon Ki Kim 4
26th International Symposium on Automation and Robotics in Construction (ISARC 2009) Motion Control of Excavator with Tele-Operated System Dongnam Kim 1, Kyeong Won Oh 2, Daehie Hong 3#, Yoon Ki Kim 4
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Multi-Rate Multi-Range Dynamic Simulation for Haptic Interaction
 Multi-Rate Multi-Range Dynamic Simulation for Haptic Interaction Ikumi Susa Makoto Sato Shoichi Hasegawa Tokyo Institute of Technology ABSTRACT In this paper, we propose a technique for a high quality
Multi-Rate Multi-Range Dynamic Simulation for Haptic Interaction Ikumi Susa Makoto Sato Shoichi Hasegawa Tokyo Institute of Technology ABSTRACT In this paper, we propose a technique for a high quality
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery
 Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
Robotics: Evolution, Technology and Applications
 Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators
 Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
An Introduction To Modular Robots
 An Introduction To Modular Robots Introduction Morphology and Classification Locomotion Applications Challenges 11/24/09 Sebastian Rockel Introduction Definition (Robot) A robot is an artificial, intelligent,
An Introduction To Modular Robots Introduction Morphology and Classification Locomotion Applications Challenges 11/24/09 Sebastian Rockel Introduction Definition (Robot) A robot is an artificial, intelligent,
Development of a Novel Low-Cost Flight Simulator for Pilot Training
 Development of a Novel Low-Cost Flight Simulator for Pilot Training Hongbin Gu, Dongsu Wu, and Hui Liu Abstract A novel low-cost flight simulator with the development goals cost effectiveness and high
Development of a Novel Low-Cost Flight Simulator for Pilot Training Hongbin Gu, Dongsu Wu, and Hui Liu Abstract A novel low-cost flight simulator with the development goals cost effectiveness and high
Skyworker: Robotics for Space Assembly, Inspection and Maintenance
 Skyworker: Robotics for Space Assembly, Inspection and Maintenance Sarjoun Skaff, Carnegie Mellon University Peter J. Staritz, Carnegie Mellon University William Whittaker, Carnegie Mellon University Abstract
Skyworker: Robotics for Space Assembly, Inspection and Maintenance Sarjoun Skaff, Carnegie Mellon University Peter J. Staritz, Carnegie Mellon University William Whittaker, Carnegie Mellon University Abstract
arxiv: v1 [cs.ro] 22 Apr 2016
![arxiv: v1 [cs.ro] 22 Apr 2016](/thumbs/86/93666401.jpg "arxiv: v1 [cs.ro] 22 Apr 2016") Validation of computer simulations of the HyQ robot arxiv:164.6818v1 [cs.ro] 22 Apr 216 Dynamic Legged Systems lab Technical Report 1 DLS-TR-1 Version 1. Marco Frigerio, Victor Barasuol, Michele Focchi
Validation of computer simulations of the HyQ robot arxiv:164.6818v1 [cs.ro] 22 Apr 216 Dynamic Legged Systems lab Technical Report 1 DLS-TR-1 Version 1. Marco Frigerio, Victor Barasuol, Michele Focchi
Ch 5 Hardware Components for Automation
 Ch 5 Hardware Components for Automation Sections: 1. Sensors 2. Actuators 3. Analog-to-Digital Conversion 4. Digital-to-Analog Conversion 5. Input/Output Devices for Discrete Data Computer-Process Interface
Ch 5 Hardware Components for Automation Sections: 1. Sensors 2. Actuators 3. Analog-to-Digital Conversion 4. Digital-to-Analog Conversion 5. Input/Output Devices for Discrete Data Computer-Process Interface
Università di Roma La Sapienza. Medical Robotics. A Teleoperation System for Research in MIRS. Marilena Vendittelli
 Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
The Haptic Impendance Control through Virtual Environment Force Compensation
 The Haptic Impendance Control through Virtual Environment Force Compensation OCTAVIAN MELINTE Robotics and Mechatronics Department Institute of Solid Mechanicsof the Romanian Academy ROMANIA octavian.melinte@yahoo.com
The Haptic Impendance Control through Virtual Environment Force Compensation OCTAVIAN MELINTE Robotics and Mechatronics Department Institute of Solid Mechanicsof the Romanian Academy ROMANIA octavian.melinte@yahoo.com
Actuators, sensors and control architecture
 Actuators, sensors and control architecture a robot is composed of three fundamental parts actuators besides motors and transmissions, they constitute the locomotion apparatus (wheels, crawlers, mechanical
Actuators, sensors and control architecture a robot is composed of three fundamental parts actuators besides motors and transmissions, they constitute the locomotion apparatus (wheels, crawlers, mechanical
Dave Wilson Director of Academic Programs National Instruments
 Dave Wilson Director of Academic Programs National Instruments Steps in the Technology Design Process Dave Wilson Director of Academic, Training and Certification Programs National Instruments Corporation
Dave Wilson Director of Academic Programs National Instruments Steps in the Technology Design Process Dave Wilson Director of Academic, Training and Certification Programs National Instruments Corporation
13/11/2013. German Aerospace Center. Virtual Reality for Planning and Controlling of Robot-based Servicing in Space. German Aerospace Center
 DLR.de Chart 1 DLR.de Chart 4 German Aerospace Center Virtual Reality for Planning and Controlling of Robot-based Servicing in Space Andreas Gerndt German Aerospace Center (DLR) Simulation and Software
DLR.de Chart 1 DLR.de Chart 4 German Aerospace Center Virtual Reality for Planning and Controlling of Robot-based Servicing in Space Andreas Gerndt German Aerospace Center (DLR) Simulation and Software
Challenges of Precision Assembly with a Miniaturized Robot
 Challenges of Precision Assembly with a Miniaturized Robot Arne Burisch, Annika Raatz, and Jürgen Hesselbach Technische Universität Braunschweig, Institute of Machine Tools and Production Technology Langer
Challenges of Precision Assembly with a Miniaturized Robot Arne Burisch, Annika Raatz, and Jürgen Hesselbach Technische Universität Braunschweig, Institute of Machine Tools and Production Technology Langer
Validation of Computer Simulations of the HyQ Robot
 April 28, 217 16:4 WSPC - Proceedings Trim Size: 9in x 6in main 1 Validation of Computer Simulations of the HyQ Robot Marco Frigerio, Victor Barasuol, Michele Focchi, Darwin G. Caldwell and Claudio Semini
April 28, 217 16:4 WSPC - Proceedings Trim Size: 9in x 6in main 1 Validation of Computer Simulations of the HyQ Robot Marco Frigerio, Victor Barasuol, Michele Focchi, Darwin G. Caldwell and Claudio Semini
Wireless Robust Robots for Application in Hostile Agricultural. environment.
 Wireless Robust Robots for Application in Hostile Agricultural Environment A.R. Hirakawa, A.M. Saraiva, C.E. Cugnasca Agricultural Automation Laboratory, Computer Engineering Department Polytechnic School,
Wireless Robust Robots for Application in Hostile Agricultural Environment A.R. Hirakawa, A.M. Saraiva, C.E. Cugnasca Agricultural Automation Laboratory, Computer Engineering Department Polytechnic School,
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
Chapter 1 Introduction
 Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
ME7752: Mechanics and Control of Robots Lecture 1
 ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
RAPID PROTOTYPING AND EMBEDDED CONTROL FOR AN ANTHROPOMORPHIC ROBOTIC HAND
 The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania RAPID PROTOTYPING AND EMBEDDED CONTROL FOR AN ANTHROPOMORPHIC ROBOTIC
The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania RAPID PROTOTYPING AND EMBEDDED CONTROL FOR AN ANTHROPOMORPHIC ROBOTIC
Actuators in Automatic Control System
 Actuators in Automatic Control System Measurement & Control Systems Transducers Measurement Process Actuators Data processing Requirement analyses Decision making Control actions CONTROL action requires
Actuators in Automatic Control System Measurement & Control Systems Transducers Measurement Process Actuators Data processing Requirement analyses Decision making Control actions CONTROL action requires
Motor control using FPGA
 Motor control using FPGA MOTIVATION In the previous chapter you learnt ways to interface external world signals with an FPGA. The next chapter discusses digital design and control implementation of different
Motor control using FPGA MOTIVATION In the previous chapter you learnt ways to interface external world signals with an FPGA. The next chapter discusses digital design and control implementation of different
GEARS-IDS Invention and Design System Educational Objectives and Standards
 GEARS-IDS Invention and Design System Educational Objectives and Standards The GEARS-IDS Invention and Design System is a customizable science, math and engineering, education tool. This product engages
GEARS-IDS Invention and Design System Educational Objectives and Standards The GEARS-IDS Invention and Design System is a customizable science, math and engineering, education tool. This product engages
CS545 Contents XIV. Components of a Robotic System. Signal Processing. Reading Assignment for Next Class
 CS545 Contents XIV Components of a Robotic System Power Supplies and Power Amplifiers Actuators Transmission Sensors Signal Processing Linear filtering Simple filtering Optimal filtering Reading Assignment
CS545 Contents XIV Components of a Robotic System Power Supplies and Power Amplifiers Actuators Transmission Sensors Signal Processing Linear filtering Simple filtering Optimal filtering Reading Assignment
Application of Gain Scheduling Technique to a 6-Axis Articulated Robot using LabVIEW R
 Application of Gain Scheduling Technique to a 6-Axis Articulated Robot using LabVIEW R ManSu Kim #,1, WonJee Chung #,2, SeungWon Jeong #,3 # School of Mechatronics, Changwon National University Changwon,
Application of Gain Scheduling Technique to a 6-Axis Articulated Robot using LabVIEW R ManSu Kim #,1, WonJee Chung #,2, SeungWon Jeong #,3 # School of Mechatronics, Changwon National University Changwon,
Introduction of Research Activity in Mechanical Systems Design Laboratory (Takeda s Lab) in Tokyo Tech
 in Tokyo Tech") Introduction of Research Activity in Mechanical Systems Design Laboratory (Takeda s Lab) in Tokyo Tech Kinematic design of asymmetrical position-orientation decoupled parallel mechanism with 5 dof Pipe
Introduction of Research Activity in Mechanical Systems Design Laboratory (Takeda s Lab) in Tokyo Tech Kinematic design of asymmetrical position-orientation decoupled parallel mechanism with 5 dof Pipe
FUmanoid Team Description Paper 2010
 FUmanoid Team Description Paper 2010 Bennet Fischer, Steffen Heinrich, Gretta Hohl, Felix Lange, Tobias Langner, Sebastian Mielke, Hamid Reza Moballegh, Stefan Otte, Raúl Rojas, Naja von Schmude, Daniel
FUmanoid Team Description Paper 2010 Bennet Fischer, Steffen Heinrich, Gretta Hohl, Felix Lange, Tobias Langner, Sebastian Mielke, Hamid Reza Moballegh, Stefan Otte, Raúl Rojas, Naja von Schmude, Daniel
Husky Robotics Team. Information Packet. Introduction
 Husky Robotics Team Information Packet Introduction We are a student robotics team at the University of Washington competing in the University Rover Challenge (URC). To compete, we bring together a team
Husky Robotics Team Information Packet Introduction We are a student robotics team at the University of Washington competing in the University Rover Challenge (URC). To compete, we bring together a team
MTRX 4700 : Experimental Robotics
 Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Airborne test results for a smart pushbroom imaging system with optoelectronic image correction
 Airborne test results for a smart pushbroom imaging system with optoelectronic image correction V. Tchernykh a, S. Dyblenko a, K. Janschek a, K. Seifart b, B. Harnisch c a Technische Universität Dresden,
Airborne test results for a smart pushbroom imaging system with optoelectronic image correction V. Tchernykh a, S. Dyblenko a, K. Janschek a, K. Seifart b, B. Harnisch c a Technische Universität Dresden,
Fundamentals of Robotics
 Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2017 205 - ESEIAAT - Terrassa School of Industrial, Aerospace and Audiovisual Engineering 707 - ESAII - Department of Automatic Control
Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2017 205 - ESEIAAT - Terrassa School of Industrial, Aerospace and Audiovisual Engineering 707 - ESAII - Department of Automatic Control
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
6 System architecture
 6 System architecture is an application for interactively controlling the animation of VRML avatars. It uses the pen interaction technique described in Chapter 3 - Interaction technique. It is used in
6 System architecture is an application for interactively controlling the animation of VRML avatars. It uses the pen interaction technique described in Chapter 3 - Interaction technique. It is used in
CS123. Programming Your Personal Robot. Part 3: Reasoning Under Uncertainty
 CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty This Week (Week 2 of Part 3) Part 3-3 Basic Introduction of Motion Planning Several Common Motion Planning Methods Plan Execution
CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty This Week (Week 2 of Part 3) Part 3-3 Basic Introduction of Motion Planning Several Common Motion Planning Methods Plan Execution
Introduction to robotics. Md. Ferdous Alam, Lecturer, MEE, SUST
 Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Brainstorm. In addition to cameras / Kinect, what other kinds of sensors would be useful?
 Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
Multisensory Based Manipulation Architecture
 Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Siemens Mechatronic Concept Designer (MCD) & intelligent purchased parts from CADENAS. Andreas Brandauer
 & intelligent purchased parts from CADENAS. Andreas Brandauer") Siemens Mechatronic Concept Designer (MCD) & intelligent purchased parts from CADENAS Andreas Brandauer Agenda 25.10.2017 08:00 (am) Introducing / Motivation Overview Interdisciplinary Development from
Siemens Mechatronic Concept Designer (MCD) & intelligent purchased parts from CADENAS Andreas Brandauer Agenda 25.10.2017 08:00 (am) Introducing / Motivation Overview Interdisciplinary Development from
Development of Hybrid Flight Simulator with Multi Degree-of-Freedom Robot
 Development of Hybrid Flight Simulator with Multi Degree-of-Freedom Robot Kakizaki Kohei, Nakajima Ryota, Tsukabe Naoki Department of Aerospace Engineering Department of Mechanical System Design Engineering
Development of Hybrid Flight Simulator with Multi Degree-of-Freedom Robot Kakizaki Kohei, Nakajima Ryota, Tsukabe Naoki Department of Aerospace Engineering Department of Mechanical System Design Engineering
Multi-Vehicles Formation Control Exploring a Scalar Field
 Multi-Vehicles Formation Control Exploring a Scalar Field Polytechnic University Department of Mechanical, Aerospace, and Manufacturing Engineering Polytechnic University,6 Metrotech,, Brooklyn, NY 11201
Multi-Vehicles Formation Control Exploring a Scalar Field Polytechnic University Department of Mechanical, Aerospace, and Manufacturing Engineering Polytechnic University,6 Metrotech,, Brooklyn, NY 11201
Space Robot. SIPNA College of Engineering and Technology, Amravati.
 International Journal of Engineering Inventions ISSN: 2278-7461, www.ijeijournal.com Volume 1, Issue 7 (October2012) PP: 60-67 Space Robot Miss. Shweta Kale 1, Miss. Gayatri Patole 2, Miss. Mohoni Mohurle
International Journal of Engineering Inventions ISSN: 2278-7461, www.ijeijournal.com Volume 1, Issue 7 (October2012) PP: 60-67 Space Robot Miss. Shweta Kale 1, Miss. Gayatri Patole 2, Miss. Mohoni Mohurle
ME 487 Mechatronics. Office: JH 515, Tel.: (505)
") ME 487 Mechatronics Instructor: Assistant: Dr. Ou Ma Office: JH 515, Email: oma@nmsu.edu Tel.: (505)646-6534 Xiumin Diao (Ph.D. student) Office: JH 608, Email: xiumin@nmsu.edu Tel.: (505)646-6544 Dept.
ME 487 Mechatronics Instructor: Assistant: Dr. Ou Ma Office: JH 515, Email: oma@nmsu.edu Tel.: (505)646-6534 Xiumin Diao (Ph.D. student) Office: JH 608, Email: xiumin@nmsu.edu Tel.: (505)646-6544 Dept.
ACTUATORS AND SENSORS. Joint actuating system. Servomotors. Sensors
 ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
Optical Correlator for Image Motion Compensation in the Focal Plane of a Satellite Camera
 15 th IFAC Symposium on Automatic Control in Aerospace Bologna, September 6, 2001 Optical Correlator for Image Motion Compensation in the Focal Plane of a Satellite Camera K. Janschek, V. Tchernykh, -
15 th IFAC Symposium on Automatic Control in Aerospace Bologna, September 6, 2001 Optical Correlator for Image Motion Compensation in the Focal Plane of a Satellite Camera K. Janschek, V. Tchernykh, -
Relative Navigation, Timing & Data. Communications for CubeSat Clusters. Nestor Voronka, Tyrel Newton
 Relative Navigation, Timing & Data Communications for CubeSat Clusters Nestor Voronka, Tyrel Newton Tethers Unlimited, Inc. 11711 N. Creek Pkwy S., Suite D113 Bothell, WA 98011 425-486-0100x678 voronka@tethers.com
Relative Navigation, Timing & Data Communications for CubeSat Clusters Nestor Voronka, Tyrel Newton Tethers Unlimited, Inc. 11711 N. Creek Pkwy S., Suite D113 Bothell, WA 98011 425-486-0100x678 voronka@tethers.com
PC-ROBOARM WITH EFFICIENT SPEED CONTROL AND PLANNING BASED ON WIRELESS TECHNOLOGY
 PC-ROBOARM WITH EFFICIENT SPEED CONTROL AND PLANNING BASED ON WIRELESS TECHNOLOGY Ms. M. Vennila 1, Ms. J. Anitha Thulasi 2 Associate Prof. &HOD / EEE Department 1, Assistant Professor /EEE Department
PC-ROBOARM WITH EFFICIENT SPEED CONTROL AND PLANNING BASED ON WIRELESS TECHNOLOGY Ms. M. Vennila 1, Ms. J. Anitha Thulasi 2 Associate Prof. &HOD / EEE Department 1, Assistant Professor /EEE Department
A Course on Marine Robotic Systems: Theory to Practice. Full Programme
 A Course on Marine Robotic Systems: Theory to Practice 27-31 January, 2015 National Institute of Oceanography, Dona Paula, Goa Opening address by the Director of NIO Full Programme 1. Introduction and
A Course on Marine Robotic Systems: Theory to Practice 27-31 January, 2015 National Institute of Oceanography, Dona Paula, Goa Opening address by the Director of NIO Full Programme 1. Introduction and
An Integrated Package of Neuromusculoskeletal Modeling Tools in Simulink
 An Integrated Package of Neuromusculoskeletal Modeling Tools in Simulink R. Davoodi, I.E. Brown, N. Lan, M. Mileusnic and G.E. Loeb A.E. Mann Institute for Biomedical Engineering, University of Southern
An Integrated Package of Neuromusculoskeletal Modeling Tools in Simulink R. Davoodi, I.E. Brown, N. Lan, M. Mileusnic and G.E. Loeb A.E. Mann Institute for Biomedical Engineering, University of Southern