CS123. Programming Your Personal Robot. Part 3: Reasoning Under Uncertainty
|
|
|
- Jemimah Baldwin
- 6 years ago
- Views:
Transcription
1 CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty
2 This Week (Week 2 of Part 3) Part 3-3 Basic Introduction of Motion Planning Several Common Motion Planning Methods Plan Execution Planning Under Uncertainty HW #3-2 Part 3-4 Other Motion Planning Methods Search (in particular A*) Opportunity for Student Demo (Race?) Talk about Final Project Logistics (form team, submit proposal) Two Suggested Projects
3 3.3 Robot Motion Planning and Control Under Uncertainty
4 Topics Introduction to Robot Motion Planning Configuration Space (C-Space) Approach Basic Motion Planning Methods Plan Execution (Control) Virtual World (Perfect Control) Real World (Uncertainty in control) Planning Under Uncertainty Homework Assignment Part #3-2


5 What is Motion Planning Also known as the Piano Mover s Problem

6 Problem Formulation The problem of motion planning can be stated as follows A start pose of the robot A desired goal pose A geometric description of the robot A geometric description of the world Find a path that moves the robot from start to goal while never touching any obstacle
 A")

7 Why Motion Planning For Robot A robot needs to move to accomplish task. Such movement should be purposeful (with respect to a given task or goal) A robot s ability to plan its movement is critical for it to be autonomous A vast research area A lot has been accomplished, but still a lot more to be done




8 Examples of Motion Planning Mobile Robots Manipulator (Arms)
9 Formal Definition of Motion Planning Configuration Space (C-Space) Approach Mapping the geometry of the task into configura5on space allows us to transform the problem of planning the mo5on of a dimensioned object into that of planning the mo5on of a point, P First Introduced by Lozano Perez (MIT), 1980 Robot reduced to a point in C-Space Obstacles mapped into C-Obstacles (in C-Space) Finding a path in the free C-Space that connects the Start Configuration to the Goal Configuration
10 Configuration of A Robot Configuration of a robot: It is the precise specification of all of the robot's degrees of freedom (DOFs).

11 Example of 2D Circular Robot Work Space Configuration Space

12 2D Polygonal Object without Rotation
13 2D Polygonal Object with Rotation
")
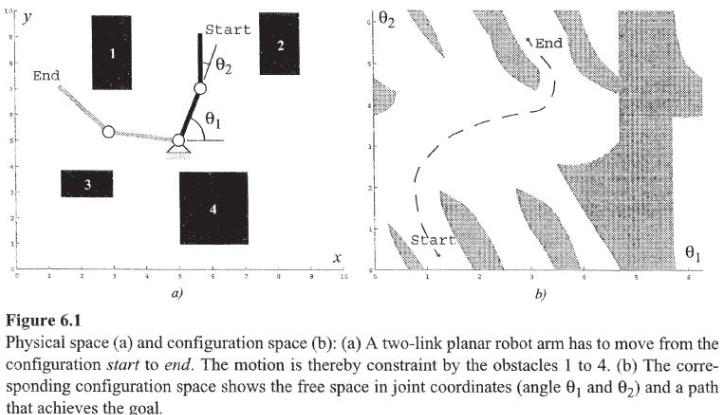
14 2D Arm (2-links)

15 Challenges of Motion Planning Continuous space and high DOF s 3D free-flying rigid object : 6 DOF Puma Arm : 6 DOF
16 Motion Planning Methods Converting a continuous space problem into a discrete graph search problem (discretization of C-space) Decouple independent DoF mobile vs. manipulatiom We will focus on planning problem of mobile robots Visibility Graph Voronoi Diagrams Cell Decomposition Exact Approximate
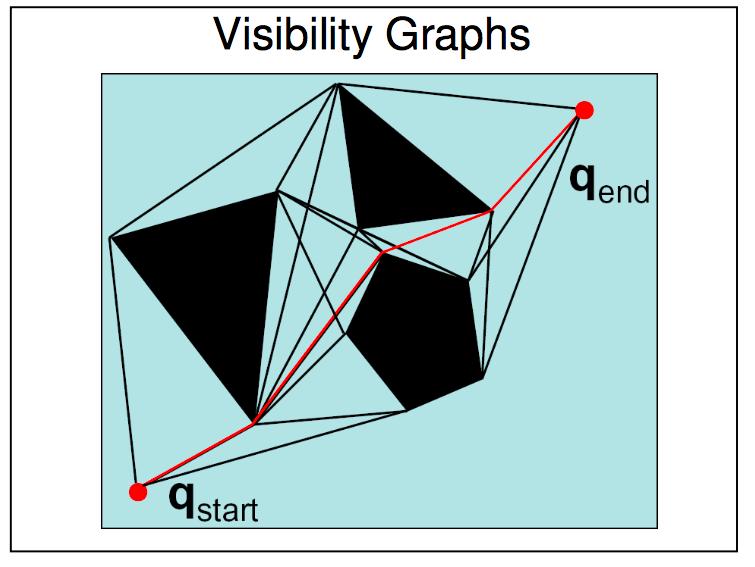
17 Visibility Graph

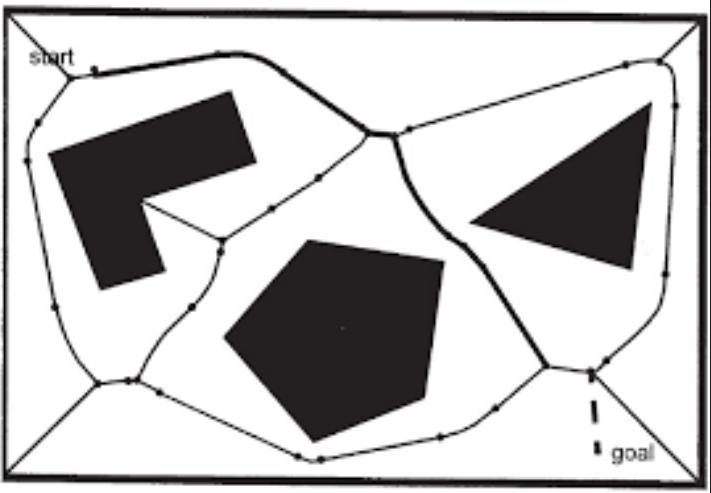
18 Voronoi Diagrams

19 Cell Decomposition : Approximate
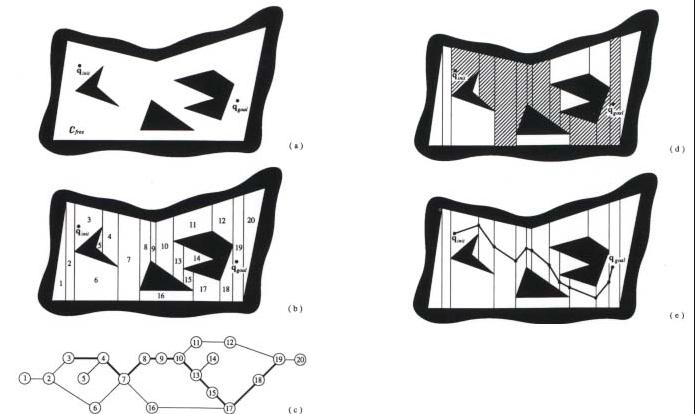
20 Cell Decomposition : Exact


21 Simplify Hamster s Simple World We approximate Hamster as its Circumscribing Circle (we assume Hamster is a 40mm x 40 mm Square) Approximate the C-space obstacles by their bounding rectangle r = 20*sqrt(2)

22 A Simple Work Space / C-space Goal Start


23 Simple Motion Plan For Hamster Using Exact Cell Decomposition Goal Start
24 Path in Work Space Goal Start




25 Plan Execution In A Perfect (Virtual) World
26 Plan Execution In Real World
27 Control Error Propagation
28 Motion Planning With Uncertainty Classical path planning methods, which use simple geometric models while assuming null uncertainty, are clearly insufficient. Taking uncertainty into account at planning 5me is essen5al when poten5al control errors are comparable to or larger than the tolerances allowed by the task.



29 Importance of Landmarks




30 Landmarks Helps Navigation Landmarks are every where and we (human) use landmarks extensively for our navigation often without realizing it

31 Use of Landmarks Must get close enough to a landmark And has a method to search for the landmark First get to the block where the restaurant is, and then walk up/down street looking for the name/sign




32 Use Of Landmark: Region Where Landmark Can be Reached Landmark Not precise representation X-y region depends on angular uncertainty Landmark can be reached when starting from this region, and executing a moving straight command with termination condition being proximty sensors detected obstacle (target)
33 Concept of Preimage The preimage of a goal region for a given motion command M = (d, TC) is the set of all points in the robot s configuration space such that if the robot starts executing the command from any one of these points, it is guaranteed to reach the goal and stop in it. We are only using the concept in a high level. For rigorous treatment of this topic, please see reading list


34 How to Guarantee Reaching New Goal Region Landmark What is the Preimage of this new goal region New Goal Region
35 Pre-image Backchaining Preimage backchaining consists of constructing a sequence of motion commands Mi, i= l,...,n, such that, if P,, is the preimage of the goal for M,, P,_t the preimage of P,, for M,,_t, and so on, then Pt contains the initial region.
36 Home Work Part #3-2 B C A, B, C, D, E, and F are obstacles. Robot should not come in contact with them Goal Condition: Robot facing obstacle A toward the high lighted surface. Both sensors detected obstacle A Start A F D E You don t have to automatically plan for the motion path. You can enter the robot path (a list of subgoals ) for the robot to follow.

37 Home Work Part #3-2 B C Goal Start A F Robot should localize at least 2 times during its travel D E Should not rely only on dead reckoning and scanning to find/ reach goal You can specify in your program where the robot should localize (part of the plan)
CS123. Programming Your Personal Robot. Part 3: Reasoning Under Uncertainty
 CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty Topics For Part 3 3.1 The Robot Programming Problem What is robot programming Challenges Real World vs. Virtual World Mapping and
CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty Topics For Part 3 3.1 The Robot Programming Problem What is robot programming Challenges Real World vs. Virtual World Mapping and
CS123 - Recap2 & Final Project
 CS123 - Recap2 & Final Project Programming Your Personal Robot Kyong-Sok KC Chang, David Zhu Fall 2015-16 Calendar Part 2 Part 1 Part 4 Part 3 Part 5 Part 5 KC Teaching David Teaching Kyong-Sok (KC) Chang
CS123 - Recap2 & Final Project Programming Your Personal Robot Kyong-Sok KC Chang, David Zhu Fall 2015-16 Calendar Part 2 Part 1 Part 4 Part 3 Part 5 Part 5 KC Teaching David Teaching Kyong-Sok (KC) Chang
Motion planning in mobile robots. Britta Schulte 3. November 2014
 Motion planning in mobile robots Britta Schulte 3. November 2014 Motion planning in mobile robots Introduction Basic Problem and Configuration Space Planning Algorithms Roadmap Cell Decomposition Potential
Motion planning in mobile robots Britta Schulte 3. November 2014 Motion planning in mobile robots Introduction Basic Problem and Configuration Space Planning Algorithms Roadmap Cell Decomposition Potential
Robot Motion Control and Planning
 Robot Motion Control and Planning http://www.cs.bilkent.edu.tr/~saranli/courses/cs548 Lecture 1 Introduction and Logistics Uluç Saranlı http://www.cs.bilkent.edu.tr/~saranli CS548 - Robot Motion Control
Robot Motion Control and Planning http://www.cs.bilkent.edu.tr/~saranli/courses/cs548 Lecture 1 Introduction and Logistics Uluç Saranlı http://www.cs.bilkent.edu.tr/~saranli CS548 - Robot Motion Control
Transactions on Information and Communications Technologies vol 6, 1994 WIT Press, ISSN
 Application of artificial neural networks to the robot path planning problem P. Martin & A.P. del Pobil Department of Computer Science, Jaume I University, Campus de Penyeta Roja, 207 Castellon, Spain
Application of artificial neural networks to the robot path planning problem P. Martin & A.P. del Pobil Department of Computer Science, Jaume I University, Campus de Penyeta Roja, 207 Castellon, Spain
Robot Motion Planning
 Robot Motion Planning Dinesh Manocha dm@cs.unc.edu The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL Robots are used everywhere HRP4C humanoid Swarm robots da vinci Big dog MEMS bugs Snake robot 2 The UNIVERSITY
Robot Motion Planning Dinesh Manocha dm@cs.unc.edu The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL Robots are used everywhere HRP4C humanoid Swarm robots da vinci Big dog MEMS bugs Snake robot 2 The UNIVERSITY
Russell and Norvig: an active, artificial agent. continuum of physical configurations and motions
 Chapter 8 Robotics Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary 8.5 Robot Institute of America defines a robot as a reprogrammable, multifunction manipulator
Chapter 8 Robotics Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary 8.5 Robot Institute of America defines a robot as a reprogrammable, multifunction manipulator
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS. Nuno Sousa Eugénio Oliveira
 AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
LAB 5: Mobile robots -- Modeling, control and tracking
 LAB 5: Mobile robots -- Modeling, control and tracking Overview In this laboratory experiment, a wheeled mobile robot will be used to illustrate Modeling Independent speed control and steering Longitudinal
LAB 5: Mobile robots -- Modeling, control and tracking Overview In this laboratory experiment, a wheeled mobile robot will be used to illustrate Modeling Independent speed control and steering Longitudinal
CSE 165: 3D User Interaction. Lecture #11: Travel
 CSE 165: 3D User Interaction Lecture #11: Travel 2 Announcements Homework 3 is on-line, due next Friday Media Teaching Lab has Merge VR viewers to borrow for cell phone based VR http://acms.ucsd.edu/students/medialab/equipment
CSE 165: 3D User Interaction Lecture #11: Travel 2 Announcements Homework 3 is on-line, due next Friday Media Teaching Lab has Merge VR viewers to borrow for cell phone based VR http://acms.ucsd.edu/students/medialab/equipment
Wireless Robust Robots for Application in Hostile Agricultural. environment.
 Wireless Robust Robots for Application in Hostile Agricultural Environment A.R. Hirakawa, A.M. Saraiva, C.E. Cugnasca Agricultural Automation Laboratory, Computer Engineering Department Polytechnic School,
Wireless Robust Robots for Application in Hostile Agricultural Environment A.R. Hirakawa, A.M. Saraiva, C.E. Cugnasca Agricultural Automation Laboratory, Computer Engineering Department Polytechnic School,
Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots
 16-782 Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Class Logistics Instructor:
16-782 Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Class Logistics Instructor:
Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics?
 16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
Robot Autonomy Project Final Report Multi-Robot Motion Planning In Tight Spaces
 16-662 Robot Autonomy Project Final Report Multi-Robot Motion Planning In Tight Spaces Aum Jadhav The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 ajadhav@andrew.cmu.edu Kazu Otani
16-662 Robot Autonomy Project Final Report Multi-Robot Motion Planning In Tight Spaces Aum Jadhav The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 ajadhav@andrew.cmu.edu Kazu Otani
What s New In SA CHAPTER
 What s New In SA CHAPTER 2 One of the advantages of SpatialAnalyzer is that development occurs at a brisk pace. New feature requests, bug fixes, and changes are implemented quickly, giving you the opportunity
What s New In SA CHAPTER 2 One of the advantages of SpatialAnalyzer is that development occurs at a brisk pace. New feature requests, bug fixes, and changes are implemented quickly, giving you the opportunity
Robotics Links to ACARA
 MATHEMATICS Foundation Shape Sort, describe and name familiar two-dimensional shapes and three-dimensional objects in the environment. (ACMMG009) Sorting and describing squares, circles, triangles, rectangles,
MATHEMATICS Foundation Shape Sort, describe and name familiar two-dimensional shapes and three-dimensional objects in the environment. (ACMMG009) Sorting and describing squares, circles, triangles, rectangles,
9.5 symmetry 2017 ink.notebook. October 25, Page Symmetry Page 134. Standards. Page Symmetry. Lesson Objectives.
 9.5 symmetry 2017 ink.notebook Page 133 9.5 Symmetry Page 134 Lesson Objectives Standards Lesson Notes Page 135 9.5 Symmetry Press the tabs to view details. 1 Lesson Objectives Press the tabs to view details.
9.5 symmetry 2017 ink.notebook Page 133 9.5 Symmetry Page 134 Lesson Objectives Standards Lesson Notes Page 135 9.5 Symmetry Press the tabs to view details. 1 Lesson Objectives Press the tabs to view details.
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (6 pts )A 2-DOF manipulator arm is attached to a mobile base with non-holonomic
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (6 pts )A 2-DOF manipulator arm is attached to a mobile base with non-holonomic
Autonomous Localization
 Autonomous Localization Jennifer Zheng, Maya Kothare-Arora I. Abstract This paper presents an autonomous localization service for the Building-Wide Intelligence segbots at the University of Texas at Austin.
Autonomous Localization Jennifer Zheng, Maya Kothare-Arora I. Abstract This paper presents an autonomous localization service for the Building-Wide Intelligence segbots at the University of Texas at Austin.
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
*Unit 1 Constructions and Transformations
 *Unit 1 Constructions and Transformations Content Area: Mathematics Course(s): Geometry CP, Geometry Honors Time Period: September Length: 10 blocks Status: Published Transfer Skills Previous coursework:
*Unit 1 Constructions and Transformations Content Area: Mathematics Course(s): Geometry CP, Geometry Honors Time Period: September Length: 10 blocks Status: Published Transfer Skills Previous coursework:
Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization
 Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path
 Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path Taichi Yamada 1, Yeow Li Sa 1 and Akihisa Ohya 1 1 Graduate School of Systems and Information Engineering, University of Tsukuba, 1-1-1,
Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path Taichi Yamada 1, Yeow Li Sa 1 and Akihisa Ohya 1 1 Graduate School of Systems and Information Engineering, University of Tsukuba, 1-1-1,
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine)
") Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
Robot Autonomy Project Auto Painting. Team: Ben Ballard Jimit Gandhi Mohak Bhardwaj Pratik Chatrath
 Robot Autonomy Project Auto Painting Team: Ben Ballard Jimit Gandhi Mohak Bhardwaj Pratik Chatrath Goal -Get HERB to paint autonomously Overview Initial Setup of Environment Problems to Solve Paintings:HERB,
Robot Autonomy Project Auto Painting Team: Ben Ballard Jimit Gandhi Mohak Bhardwaj Pratik Chatrath Goal -Get HERB to paint autonomously Overview Initial Setup of Environment Problems to Solve Paintings:HERB,
Research Statement MAXIM LIKHACHEV
 Research Statement MAXIM LIKHACHEV My long-term research goal is to develop a methodology for robust real-time decision-making in autonomous systems. To achieve this goal, my students and I research novel
Research Statement MAXIM LIKHACHEV My long-term research goal is to develop a methodology for robust real-time decision-making in autonomous systems. To achieve this goal, my students and I research novel
Design Project Introduction DE2-based SecurityBot
 Design Project Introduction DE2-based SecurityBot ECE2031 Fall 2017 1 Design Project Motivation ECE 2031 includes the sophomore-level team design experience You are developing a useful set of tools eventually
Design Project Introduction DE2-based SecurityBot ECE2031 Fall 2017 1 Design Project Motivation ECE 2031 includes the sophomore-level team design experience You are developing a useful set of tools eventually
Rearrangement task realization by multiple mobile robots with efficient calculation of task constraints
 2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 WeA1.2 Rearrangement task realization by multiple mobile robots with efficient calculation of task constraints
2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 WeA1.2 Rearrangement task realization by multiple mobile robots with efficient calculation of task constraints
UNIT VI. Current approaches to programming are classified as into two major categories:
 Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
4D-Particle filter localization for a simulated UAV
 4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
Haptics CS327A
 Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
3D User Interfaces. Using the Kinect and Beyond. John Murray. John Murray
 Using the Kinect and Beyond // Center for Games and Playable Media // http://games.soe.ucsc.edu John Murray John Murray Expressive Title Here (Arial) Intelligence Studio Introduction to Interfaces User
Using the Kinect and Beyond // Center for Games and Playable Media // http://games.soe.ucsc.edu John Murray John Murray Expressive Title Here (Arial) Intelligence Studio Introduction to Interfaces User
Learning Actions from Demonstration
 Learning Actions from Demonstration Michael Tirtowidjojo, Matthew Frierson, Benjamin Singer, Palak Hirpara October 2, 2016 Abstract The goal of our project is twofold. First, we will design a controller
Learning Actions from Demonstration Michael Tirtowidjojo, Matthew Frierson, Benjamin Singer, Palak Hirpara October 2, 2016 Abstract The goal of our project is twofold. First, we will design a controller
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
Activity 5.2 Making Sketches in CAD
 Activity 5.2 Making Sketches in CAD Introduction It would be great if computer systems were advanced enough to take a mental image of an object, such as the thought of a sports car, and instantly generate
Activity 5.2 Making Sketches in CAD Introduction It would be great if computer systems were advanced enough to take a mental image of an object, such as the thought of a sports car, and instantly generate
Autonomous Robotics. CS Fall Amarda Shehu. Department of Computer Science George Mason University
 Autonomous Robotics CS 485 - Fall 2016 Amarda Shehu Department of Computer Science George Mason University 1 Outline of Today s Class 2 Robotics over the Years 3 Trends in Robotics Research 4 Course Organization
Autonomous Robotics CS 485 - Fall 2016 Amarda Shehu Department of Computer Science George Mason University 1 Outline of Today s Class 2 Robotics over the Years 3 Trends in Robotics Research 4 Course Organization
COGNITIVE MODEL OF MOBILE ROBOT WORKSPACE
 COGNITIVE MODEL OF MOBILE ROBOT WORKSPACE Prof.dr.sc. Mladen Crneković, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb Prof.dr.sc. Davor Zorc, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb
COGNITIVE MODEL OF MOBILE ROBOT WORKSPACE Prof.dr.sc. Mladen Crneković, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb Prof.dr.sc. Davor Zorc, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb
NAVIGATION OF MOBILE ROBOTS
 MOBILE ROBOTICS course NAVIGATION OF MOBILE ROBOTS Maria Isabel Ribeiro Pedro Lima mir@isr.ist.utl.pt pal@isr.ist.utl.pt Instituto Superior Técnico (IST) Instituto de Sistemas e Robótica (ISR) Av.Rovisco
MOBILE ROBOTICS course NAVIGATION OF MOBILE ROBOTS Maria Isabel Ribeiro Pedro Lima mir@isr.ist.utl.pt pal@isr.ist.utl.pt Instituto Superior Técnico (IST) Instituto de Sistemas e Robótica (ISR) Av.Rovisco
Robotic Systems ECE 401RB Fall 2007
 The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
Robust Haptic Teleoperation of a Mobile Manipulation Platform
 Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
Designing Information Devices and Systems I Fall 2016 Babak Ayazifar, Vladimir Stojanovic Homework 11
 EECS 16A Designing Information Devices and Systems I Fall 2016 Babak Ayazifar, Vladimir Stojanovic Homework 11 This homework is due Nov 15, 2016, at 1PM. 1. Homework process and study group Who else did
EECS 16A Designing Information Devices and Systems I Fall 2016 Babak Ayazifar, Vladimir Stojanovic Homework 11 This homework is due Nov 15, 2016, at 1PM. 1. Homework process and study group Who else did
Laboratory Mini-Projects Summary
 ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
Robot Task-Level Programming Language and Simulation
 Robot Task-Level Programming Language and Simulation M. Samaka Abstract This paper presents the development of a software application for Off-line robot task programming and simulation. Such application
Robot Task-Level Programming Language and Simulation M. Samaka Abstract This paper presents the development of a software application for Off-line robot task programming and simulation. Such application
Recommended Text. Logistics. Course Logistics. Intelligent Robotic Systems
 Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
DIMENSIONING ENGINEERING DRAWINGS
 DIMENSIONING ENGINEERING DRAWINGS An engineering drawing must be properly dimensioned in order to convey the designer s intent to the end user. Dimensions provide the information needed to specify the
DIMENSIONING ENGINEERING DRAWINGS An engineering drawing must be properly dimensioned in order to convey the designer s intent to the end user. Dimensions provide the information needed to specify the
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous Mobile Robots
 Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
Path Planning in Dynamic Environments Using Time Warps. S. Farzan and G. N. DeSouza
 Path Planning in Dynamic Environments Using Time Warps S. Farzan and G. N. DeSouza Outline Introduction Harmonic Potential Fields Rubber Band Model Time Warps Kalman Filtering Experimental Results 2 Introduction
Path Planning in Dynamic Environments Using Time Warps S. Farzan and G. N. DeSouza Outline Introduction Harmonic Potential Fields Rubber Band Model Time Warps Kalman Filtering Experimental Results 2 Introduction
Brett Browning and. Spring 2011
 Brett Browning and M. Bernardine Dias Spring 2011 Lab #1 feedback Final project overview Final project teams Lab #2 overview Slide 2 Cluttered racing task Probably want to be able to accelerate fast, brake
Brett Browning and M. Bernardine Dias Spring 2011 Lab #1 feedback Final project overview Final project teams Lab #2 overview Slide 2 Cluttered racing task Probably want to be able to accelerate fast, brake
Unit 12: Artificial Intelligence CS 101, Fall 2018
 Unit 12: Artificial Intelligence CS 101, Fall 2018 Learning Objectives After completing this unit, you should be able to: Explain the difference between procedural and declarative knowledge. Describe the
Unit 12: Artificial Intelligence CS 101, Fall 2018 Learning Objectives After completing this unit, you should be able to: Explain the difference between procedural and declarative knowledge. Describe the
Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments
 Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments IMI Lab, Dept. of Computer Science University of North Carolina Charlotte Outline Problem and Context Basic RAMP Framework
Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments IMI Lab, Dept. of Computer Science University of North Carolina Charlotte Outline Problem and Context Basic RAMP Framework
Introduction to robotics. Md. Ferdous Alam, Lecturer, MEE, SUST
 Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Robots Leaving the Production Halls Opportunities and Challenges
 Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Prospective Teleautonomy For EOD Operations
 Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Rethinking CAD. Brent Stucker, Univ. of Louisville Pat Lincoln, SRI
 Rethinking CAD Brent Stucker, Univ. of Louisville Pat Lincoln, SRI The views expressed are those of the author and do not reflect the official policy or position of the Department of Defense or the U.S.
Rethinking CAD Brent Stucker, Univ. of Louisville Pat Lincoln, SRI The views expressed are those of the author and do not reflect the official policy or position of the Department of Defense or the U.S.
Digital image processing vs. computer vision Higher-level anchoring
 Digital image processing vs. computer vision Higher-level anchoring Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception
Digital image processing vs. computer vision Higher-level anchoring Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception
Learning and Using Models of Kicking Motions for Legged Robots
 Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
CSE 165: 3D User Interaction. Lecture #14: 3D UI Design
 CSE 165: 3D User Interaction Lecture #14: 3D UI Design 2 Announcements Homework 3 due tomorrow 2pm Monday: midterm discussion Next Thursday: midterm exam 3D UI Design Strategies 3 4 Thus far 3DUI hardware
CSE 165: 3D User Interaction Lecture #14: 3D UI Design 2 Announcements Homework 3 due tomorrow 2pm Monday: midterm discussion Next Thursday: midterm exam 3D UI Design Strategies 3 4 Thus far 3DUI hardware
An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots
 An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany maren,burgard
An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany maren,burgard
Artificial Neural Network based Mobile Robot Navigation
 Artificial Neural Network based Mobile Robot Navigation István Engedy Budapest University of Technology and Economics, Department of Measurement and Information Systems, Magyar tudósok körútja 2. H-1117,
Artificial Neural Network based Mobile Robot Navigation István Engedy Budapest University of Technology and Economics, Department of Measurement and Information Systems, Magyar tudósok körútja 2. H-1117,
Distributed Intelligence in Autonomous Robotics. Assignment #1 Out: Thursday, January 16, 2003 Due: Tuesday, January 28, 2003
 Distributed Intelligence in Autonomous Robotics Assignment #1 Out: Thursday, January 16, 2003 Due: Tuesday, January 28, 2003 The purpose of this assignment is to build familiarity with the Nomad200 robotic
Distributed Intelligence in Autonomous Robotics Assignment #1 Out: Thursday, January 16, 2003 Due: Tuesday, January 28, 2003 The purpose of this assignment is to build familiarity with the Nomad200 robotic
E190Q Lecture 15 Autonomous Robot Navigation
 E190Q Lecture 15 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2014 1 Figures courtesy of Probabilistic Robotics (Thrun et. Al.) Control Structures Planning Based Control Prior Knowledge
E190Q Lecture 15 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2014 1 Figures courtesy of Probabilistic Robotics (Thrun et. Al.) Control Structures Planning Based Control Prior Knowledge
On-demand printable robots
 On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
MADISON PUBLIC SCHOOL DISTRICT. GRADE 7 Robotics Cycle
 MADISON PUBLIC SCHOOL DISTRICT GRADE 7 Robotics Cycle Authored by: Erik Lih Richard Newbery Reviewed by: Lee Nittel Director of Curriculum and Instruction Tom Paterson K12 Supervisor of Science and Technology
MADISON PUBLIC SCHOOL DISTRICT GRADE 7 Robotics Cycle Authored by: Erik Lih Richard Newbery Reviewed by: Lee Nittel Director of Curriculum and Instruction Tom Paterson K12 Supervisor of Science and Technology
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
VR/AR Concepts in Architecture And Available Tools
 VR/AR Concepts in Architecture And Available Tools Peter Kán Interactive Media Systems Group Institute of Software Technology and Interactive Systems TU Wien Outline 1. What can you do with virtual reality
VR/AR Concepts in Architecture And Available Tools Peter Kán Interactive Media Systems Group Institute of Software Technology and Interactive Systems TU Wien Outline 1. What can you do with virtual reality
Concentric Spatial Maps for Neural Network Based Navigation
 Concentric Spatial Maps for Neural Network Based Navigation Gerald Chao and Michael G. Dyer Computer Science Department, University of California, Los Angeles Los Angeles, California 90095, U.S.A. gerald@cs.ucla.edu,
Concentric Spatial Maps for Neural Network Based Navigation Gerald Chao and Michael G. Dyer Computer Science Department, University of California, Los Angeles Los Angeles, California 90095, U.S.A. gerald@cs.ucla.edu,
Adaptive Touch Sampling for Energy-Efficient Mobile Platforms
 Adaptive Touch Sampling for Energy-Efficient Mobile Platforms Kyungtae Han Intel Labs, USA Alexander W. Min, Dongho Hong, Yong-joon Park Intel Corporation, USA April 16, 2015 Touch Interface in Today s
Adaptive Touch Sampling for Energy-Efficient Mobile Platforms Kyungtae Han Intel Labs, USA Alexander W. Min, Dongho Hong, Yong-joon Park Intel Corporation, USA April 16, 2015 Touch Interface in Today s
Simulation of Mobile Robots in Virtual Environments
 Simulation of Mobile Robots in Virtual Environments Jesús Savage 1, Emmanuel Hernández 2, Gabriel Vázquez 3, Humberto Espinosa 4, Edna Márquez 5 Laboratory of Intelligent Interfaces, University of Mexico,
Simulation of Mobile Robots in Virtual Environments Jesús Savage 1, Emmanuel Hernández 2, Gabriel Vázquez 3, Humberto Espinosa 4, Edna Márquez 5 Laboratory of Intelligent Interfaces, University of Mexico,
Robust Navigation using Markov Models
 Robust Navigation using Markov Models Julien Burlet, Olivier Aycard, Thierry Fraichard To cite this version: Julien Burlet, Olivier Aycard, Thierry Fraichard. Robust Navigation using Markov Models. Proc.
Robust Navigation using Markov Models Julien Burlet, Olivier Aycard, Thierry Fraichard To cite this version: Julien Burlet, Olivier Aycard, Thierry Fraichard. Robust Navigation using Markov Models. Proc.
The Geometry of Cognitive Maps
 The Geometry of Cognitive Maps Metric vs. Ordinal Structure Marianne Harrison William H. Warren Michael Tarr Brown University Poster presented at Vision ScienceS May 5, 2001 Introduction What geometrical
The Geometry of Cognitive Maps Metric vs. Ordinal Structure Marianne Harrison William H. Warren Michael Tarr Brown University Poster presented at Vision ScienceS May 5, 2001 Introduction What geometrical
Homework 10: Patent Liability Analysis
 Homework 10: Patent Liability Analysis Team Code Name: Autonomous Targeting Vehicle (ATV) Group No. 3 Team Member Completing This Homework: Anthony Myers E-mail Address of Team Member: myersar @ purdue.edu
Homework 10: Patent Liability Analysis Team Code Name: Autonomous Targeting Vehicle (ATV) Group No. 3 Team Member Completing This Homework: Anthony Myers E-mail Address of Team Member: myersar @ purdue.edu
Navigation of an Autonomous Underwater Vehicle in a Mobile Network
 Navigation of an Autonomous Underwater Vehicle in a Mobile Network Nuno Santos, Aníbal Matos and Nuno Cruz Faculdade de Engenharia da Universidade do Porto Instituto de Sistemas e Robótica - Porto Rua
Navigation of an Autonomous Underwater Vehicle in a Mobile Network Nuno Santos, Aníbal Matos and Nuno Cruz Faculdade de Engenharia da Universidade do Porto Instituto de Sistemas e Robótica - Porto Rua
Localization (Position Estimation) Problem in WSN
 Problem in WSN") Localization (Position Estimation) Problem in WSN [1] Convex Position Estimation in Wireless Sensor Networks by L. Doherty, K.S.J. Pister, and L.E. Ghaoui [2] Semidefinite Programming for Ad Hoc Wireless
Localization (Position Estimation) Problem in WSN [1] Convex Position Estimation in Wireless Sensor Networks by L. Doherty, K.S.J. Pister, and L.E. Ghaoui [2] Semidefinite Programming for Ad Hoc Wireless
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
CS686: High-level Motion/Path Planning Applications
 CS686: High-level Motion/Path Planning Applications Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Discuss my general research view on motion planning Discuss
CS686: High-level Motion/Path Planning Applications Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Discuss my general research view on motion planning Discuss
What is Robot Mapping? Robot Mapping. Introduction to Robot Mapping. Related Terms. What is SLAM? ! Robot a device, that moves through the environment
 Robot Mapping Introduction to Robot Mapping What is Robot Mapping?! Robot a device, that moves through the environment! Mapping modeling the environment Cyrill Stachniss 1 2 Related Terms State Estimation
Robot Mapping Introduction to Robot Mapping What is Robot Mapping?! Robot a device, that moves through the environment! Mapping modeling the environment Cyrill Stachniss 1 2 Related Terms State Estimation
Continuous Observation Planning. for Autonomous Exploration. Bradley R. Hasegawa
 Continuous Observation Planning for Autonomous Exploration by Bradley R. Hasegawa Submitted to the Department of Electrical Engineering and Computer Science in Partial Fulfillment of the Requirements for
Continuous Observation Planning for Autonomous Exploration by Bradley R. Hasegawa Submitted to the Department of Electrical Engineering and Computer Science in Partial Fulfillment of the Requirements for
Team Autono-Mo. Jacobia. Department of Computer Science and Engineering The University of Texas at Arlington
 Department of Computer Science and Engineering The University of Texas at Arlington Team Autono-Mo Jacobia Architecture Design Specification Team Members: Bill Butts Darius Salemizadeh Lance Storey Yunesh
Department of Computer Science and Engineering The University of Texas at Arlington Team Autono-Mo Jacobia Architecture Design Specification Team Members: Bill Butts Darius Salemizadeh Lance Storey Yunesh
Structure and Synthesis of Robot Motion
 Structure and Synthesis of Robot Motion Motion Synthesis in Groups and Formations I Subramanian Ramamoorthy School of Informatics 5 March 2012 Consider Motion Problems with Many Agents How should we model
Structure and Synthesis of Robot Motion Motion Synthesis in Groups and Formations I Subramanian Ramamoorthy School of Informatics 5 March 2012 Consider Motion Problems with Many Agents How should we model
Development of a Sensor-Based Approach for Local Minima Recovery in Unknown Environments
 Development of a Sensor-Based Approach for Local Minima Recovery in Unknown Environments Danial Nakhaeinia 1, Tang Sai Hong 2 and Pierre Payeur 1 1 School of Electrical Engineering and Computer Science,
Development of a Sensor-Based Approach for Local Minima Recovery in Unknown Environments Danial Nakhaeinia 1, Tang Sai Hong 2 and Pierre Payeur 1 1 School of Electrical Engineering and Computer Science,
Test Plan. Robot Soccer. ECEn Senior Project. Real Madrid. Daniel Gardner Warren Kemmerer Brandon Williams TJ Schramm Steven Deshazer
 Test Plan Robot Soccer ECEn 490 - Senior Project Real Madrid Daniel Gardner Warren Kemmerer Brandon Williams TJ Schramm Steven Deshazer CONTENTS Introduction... 3 Skill Tests Determining Robot Position...
Test Plan Robot Soccer ECEn 490 - Senior Project Real Madrid Daniel Gardner Warren Kemmerer Brandon Williams TJ Schramm Steven Deshazer CONTENTS Introduction... 3 Skill Tests Determining Robot Position...
Range Sensing strategies
 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Robotics. Applied artificial intelligence (EDA132) Lecture Elin A. Topp
 Lecture Elin A. Topp") Robotics Applied artificial intelligence (EDA132) Lecture 10 2015-02-20 Elin A. Topp Course book (chapter 25), images & movies from various sources, and original material Images are film characters found
Robotics Applied artificial intelligence (EDA132) Lecture 10 2015-02-20 Elin A. Topp Course book (chapter 25), images & movies from various sources, and original material Images are film characters found
1. Mechanical Arms Hardware
 TC.0.1 Analysis 1. Mechanical Arms Hardware TP 8.1: ATLAS apparatus must be able to simulate touch actions on a touchscreen MFD. TP 8.2: ATLAS apparatus must be able to simulate drag and drop actions on
TC.0.1 Analysis 1. Mechanical Arms Hardware TP 8.1: ATLAS apparatus must be able to simulate touch actions on a touchscreen MFD. TP 8.2: ATLAS apparatus must be able to simulate drag and drop actions on
CS 599: Distributed Intelligence in Robotics
 CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
Mechatronics Project Report
 Mechatronics Project Report Introduction Robotic fish are utilized in the Dynamic Systems Laboratory in order to study and model schooling in fish populations, with the goal of being able to manage aquatic
Mechatronics Project Report Introduction Robotic fish are utilized in the Dynamic Systems Laboratory in order to study and model schooling in fish populations, with the goal of being able to manage aquatic
Term Paper: Robot Arm Modeling
 Term Paper: Robot Arm Modeling Akul Penugonda December 10, 2014 1 Abstract This project attempts to model and verify the motion of a robot arm. The two joints used in robot arms - prismatic and rotational.
Term Paper: Robot Arm Modeling Akul Penugonda December 10, 2014 1 Abstract This project attempts to model and verify the motion of a robot arm. The two joints used in robot arms - prismatic and rotational.
CS 730/830: Intro AI. Prof. Wheeler Ruml. TA Bence Cserna. Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1
 CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
COPRIN project. Contraintes, OPtimisation et Résolution par INtervalles. Constraints, OPtimization and Resolving through INtervals. 1/15. p.
 COPRIN project Contraintes, OPtimisation et Résolution par INtervalles Constraints, OPtimization and Resolving through INtervals 1/15. p.1/15 COPRIN project Contraintes, OPtimisation et Résolution par
COPRIN project Contraintes, OPtimisation et Résolution par INtervalles Constraints, OPtimization and Resolving through INtervals 1/15. p.1/15 COPRIN project Contraintes, OPtimisation et Résolution par
Problem of the Month: Between the Lines
 Problem of the Month: Between the Lines Overview: In the Problem of the Month Between the Lines, students use polygons to solve problems involving area. The mathematical topics that underlie this POM are
Problem of the Month: Between the Lines Overview: In the Problem of the Month Between the Lines, students use polygons to solve problems involving area. The mathematical topics that underlie this POM are
Robot Mapping. Introduction to Robot Mapping. Cyrill Stachniss
 Robot Mapping Introduction to Robot Mapping Cyrill Stachniss 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms State Estimation
Robot Mapping Introduction to Robot Mapping Cyrill Stachniss 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms State Estimation
Blending Human and Robot Inputs for Sliding Scale Autonomy *
 Blending Human and Robot Inputs for Sliding Scale Autonomy * Munjal Desai Computer Science Dept. University of Massachusetts Lowell Lowell, MA 01854, USA mdesai@cs.uml.edu Holly A. Yanco Computer Science
Blending Human and Robot Inputs for Sliding Scale Autonomy * Munjal Desai Computer Science Dept. University of Massachusetts Lowell Lowell, MA 01854, USA mdesai@cs.uml.edu Holly A. Yanco Computer Science
Team KMUTT: Team Description Paper
 Team KMUTT: Team Description Paper Thavida Maneewarn, Xye, Pasan Kulvanit, Sathit Wanitchaikit, Panuvat Sinsaranon, Kawroong Saktaweekulkit, Nattapong Kaewlek Djitt Laowattana King Mongkut s University
Team KMUTT: Team Description Paper Thavida Maneewarn, Xye, Pasan Kulvanit, Sathit Wanitchaikit, Panuvat Sinsaranon, Kawroong Saktaweekulkit, Nattapong Kaewlek Djitt Laowattana King Mongkut s University
Randomized Motion Planning for Groups of Nonholonomic Robots
 Randomized Motion Planning for Groups of Nonholonomic Robots Christopher M Clark chrisc@sun-valleystanfordedu Stephen Rock rock@sun-valleystanfordedu Department of Aeronautics & Astronautics Stanford University
Randomized Motion Planning for Groups of Nonholonomic Robots Christopher M Clark chrisc@sun-valleystanfordedu Stephen Rock rock@sun-valleystanfordedu Department of Aeronautics & Astronautics Stanford University
ROBOT CONTROL VIA DIALOGUE. Arkady Yuschenko
 158 No:13 Intelligent Information and Engineering Systems ROBOT CONTROL VIA DIALOGUE Arkady Yuschenko Abstract: The most rational mode of communication between intelligent robot and human-operator is bilateral
158 No:13 Intelligent Information and Engineering Systems ROBOT CONTROL VIA DIALOGUE Arkady Yuschenko Abstract: The most rational mode of communication between intelligent robot and human-operator is bilateral
Attribute Based Specification, Comparison And Selection Of A Robot
 Attribute Based Specification, Comparison And Selection Of A Robot P. P. Bhangale, V. P. Agrawal, S. K. Saha Dept. of Mechanical Engg., Indian Institute of Technology Delhi, Hauz Khas, New Delhi-006 ABSTRACT
Attribute Based Specification, Comparison And Selection Of A Robot P. P. Bhangale, V. P. Agrawal, S. K. Saha Dept. of Mechanical Engg., Indian Institute of Technology Delhi, Hauz Khas, New Delhi-006 ABSTRACT