Combot: Compliant Climbing Robotic Platform with Transitioning Capability and Payload Capacity
|
|
|
- Julie Paul
- 6 years ago
- Views:
Transcription
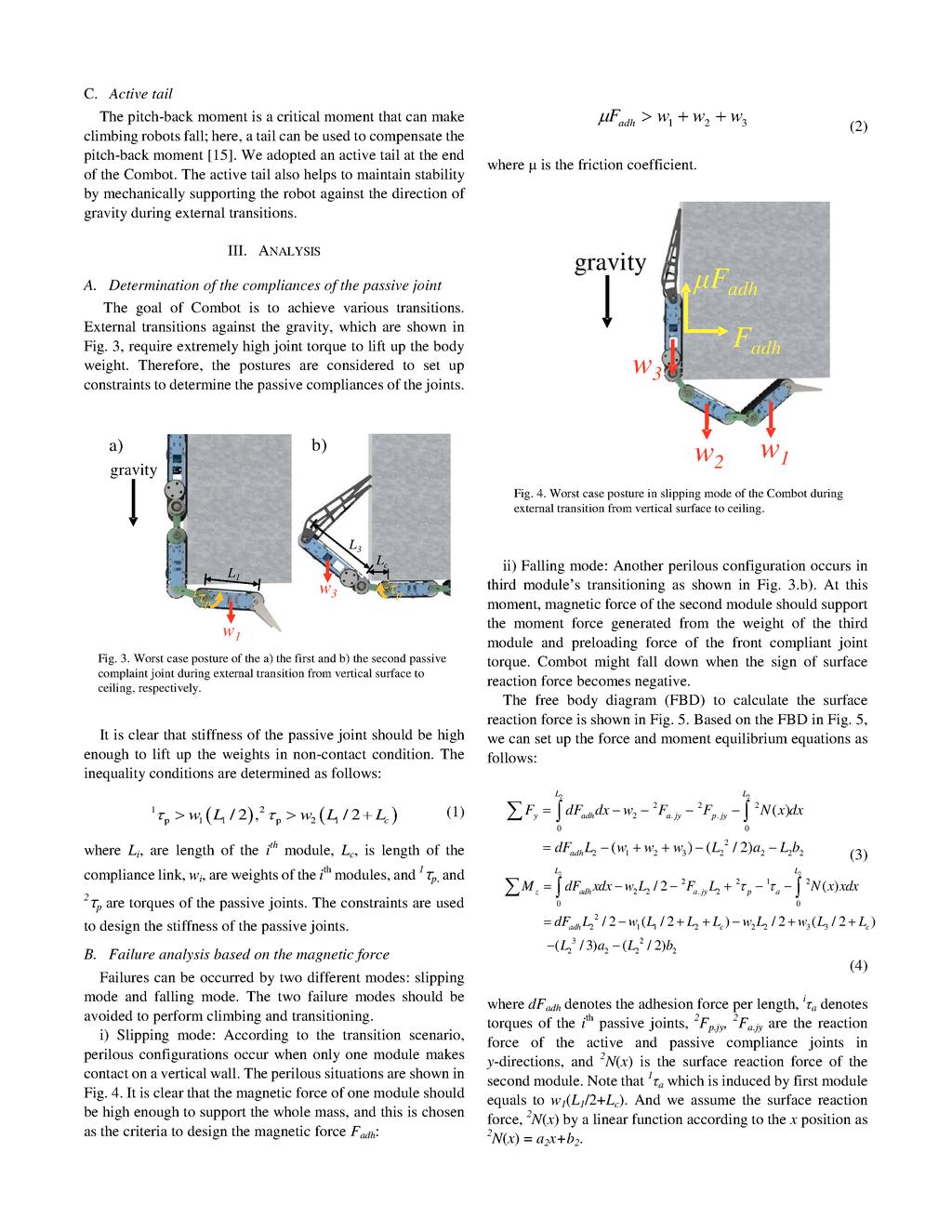
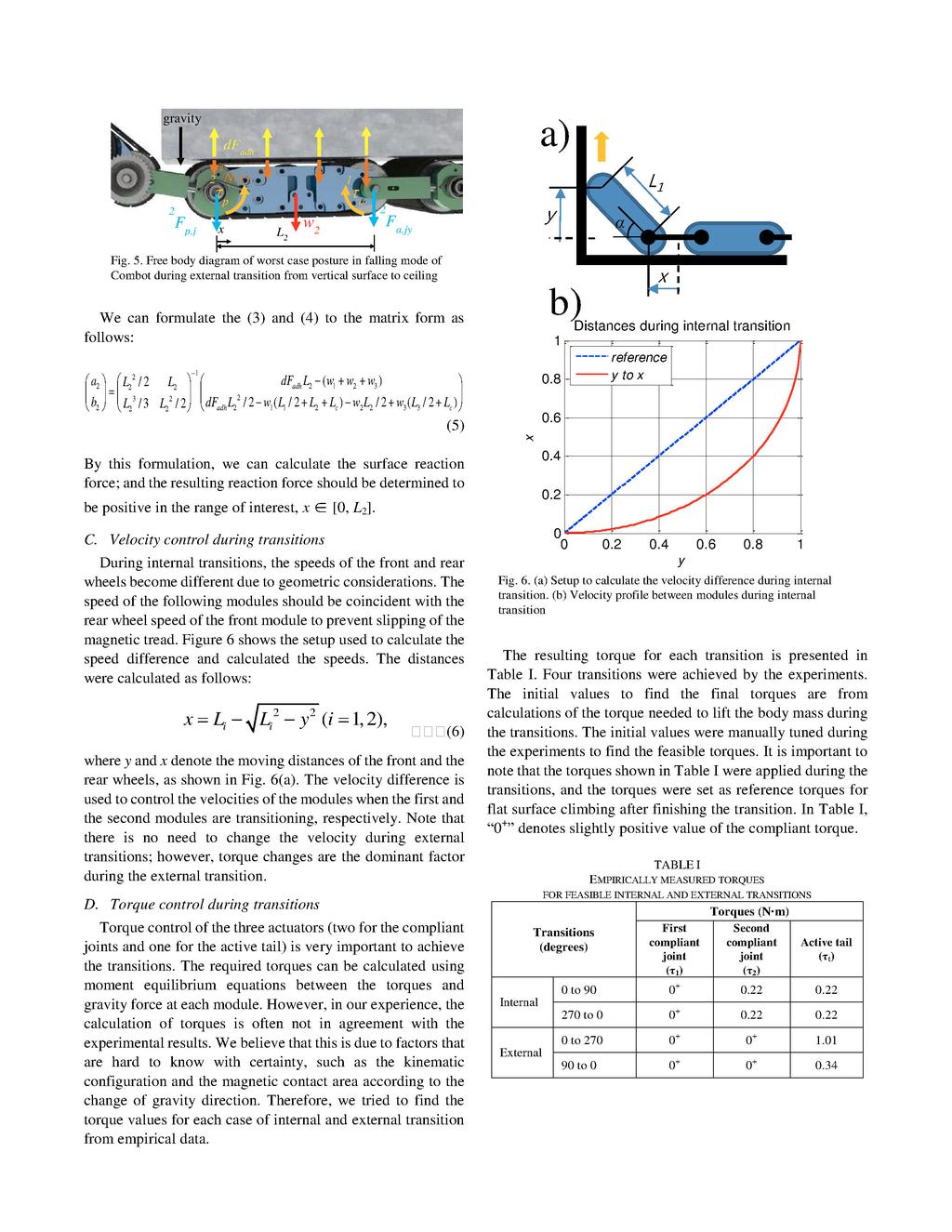
1 2012 IEEE International Conference on Robotics and Automation RiverCentre, Saint Paul, Minnesota, USA May 14-18, 2012 Combot: Compliant Climbing Robotic Platform with Transitioning Capability and Payload Capacity Giuk Lee, Geeyun Wu, Sun Ho Kim, Jongwon Kim, and TaeWon Seo, Member, IEEE Abstract Transitioning capability and high payload capacity are problems for climbing robots. To increase the possible applications for climbing robots, these two abilities are required. achieve both transitioning capability and high payload capacity. The robot is composed of three main modules with flexible magnetic treads, connecting links with torsion springs and torque-controlled motors, and an active tail at the end of the robot. The robot can perform internal and external transitions using compliant torques from the torsion springs and the active tail. The compliant torques are changed according to external structures; thus, a complex feedback controller is not required. The payload capacity of the robot is measured by 10 kg (1.56 times the robot mass) during flat surface vertical climbing. The robot is expected to be used to move heavy materials to high places in the ship building industry. R I. INTRODUCTION ecently, climbing robots have been widely researched for applications including the inspection of oil tanks [1, 2], the inspection of nuclear power plants [3, 4], the cleaning of high-rise buildings [5, 6], and exploration in natural environments [7, 8]. Many robots show excellent climbing abilities on flat surfaces without payloads. However, transitioning abilities (transitioning abilities are closely related to obstacle overcoming abilities) and payload capacities are not yet satisfactory. Since user condition of the climbing robot is various in shape and devices to be carried is also varies according to the applications, the applicable areas of climbing robots are limited due to the limitation of transitioning abilities and payload capacity. To increase the applicable areas of climbing robots, several climbing robots have been suggested to solve the transitioning and payload problems. However, performance is not yet satisfactory. Fischer et al. [9] suggested a two-wheeled compact magnetic robot that can perform almost every kind of transition; however, the payload capacity of the robot is This work was supported by the National Research Foundation (NRF) of Korea Grant funded by the Korean Government (MEST) [No and No ] and Priority Research Centers Program through the NRF of Korea funded by the Ministry of Education, Science and Technology [No ]. Giuk Lee, Geeyun Wu, and Jongwon Kim are with the School of Mechanical Engineering, Seoul National University, Seoul, Korea ( gulee@rodel.snu.ac.kr; geeyun.wu@gmail.com; jongkim@snu.ac.kr). Sun Ho Kim is with the Mechatronics Center, Samsung Electronics, Suwon, Korea ( sunkim@rodel.snu.ac.kr). TaeWon Seo is with the School of Mechanical Engineering, Yeungnam University, Gyeongsan, Korea (corresponding author, tel: ; fax: ; taewon_seo@yu.ac.kr). limited because the robot maintains its position against gravity by line contact of the wheels. Kim et al. [10] proposed a seven-linked climbing robot with suction pads to achieve a thin-wall transition; however, the payload capacity is not high since the mass of the complex robot is very large. Grieco et al. [11] suggested a six-legged climbing robot with a high-payload. However, the robot cannot perform any transitions. We note several related several studies of the authors. Lee et al. [12] proposed a compliant track-wheel climbing robot. The robot was composed of one magnetic tread that changed the configuration by using compliant joints inside the treads. The robot can perform only one internal and one external transition using the compliant joints; however, the robot can carry 3 kg, which is a relatively high payload compared to other climbing robots. Seo and Sitti [13] suggested a tank-like two-linked climbing robot using sticky flexible treads. The robot can perform three internal transitions, two external transitions, and one thin-wall transition; however, the payload capacity of 0.5 kg is inadequate to carry many kinds of devices. We propose a new climbing robotic platform with high-transitioning ability and high-payload capacity, named e design the new climbing robot by combining the advantages of two previous climbing robots developed by the authors: a transformable robot by Lee et al. [12], and a compliant robot by Seo and Sitti [13]. The robot is composed of three modules with magnetic treads. The modules are connected by compliant joints that generate compliant torques using passive torsion springs or an active torque-controlled motor. An active torque-controlled tail is attached to the robot to compensate the pitch-back moment. We emphasize three main contributions of this research: i) high-transitioning capability, ii) high-payload capacity, and iii) the low cost of control without the need for a feedback controller. There have been many climbing robots that can perform transitions or robots that can carry heavy payloads on a flat surface. The proposed robot can perform both various transitions and can carry heavy payloads on flat surface. Furthermore, the robot is not controlled by a complex feedback controller based on kinematics or dynamics it is controlled by a torque controller based on case-by-case conditions. Some degrees of freedom (DOFs) are passively operated by torsion springs rather than by feedback control. So, the cost of a complex feedback controller is eliminated. The rest of the paper is organized as follows. Section II /12/$ IEEE 2737
.")
 modeling tool (Version 2010, SolidWorks, Dassault Systems, Concord, MA, USA).")
2 describes the robot configuration in detail, with a detailed drawing of the robot prototype. Section III explains the analysis results with respect to design parameters (velocity control and torque control). Extensive experimental results on transitions ability and payloads ability are presented in Section IV. Our conclusions are presented in Section V. II. ROBOT DESIGN Figure 1 shows the Combot configuration designed using a three-dimensional (3-D) modeling tool (Version 2010, SolidWorks, Dassault Systems, Concord, MA, USA). The robot is composed of three main modules as [14]: the active and passive compliant joints, and an active tail. The three main modules generate driving force by rotating a magnetic tread. The two active joints are rotated by torque-controlled motors and the two passive joints are rotated by torsion springs. The active tail generates tail force from a torque-controlled motor to compensate the pitch-back moment of the robot. A. Main module with magnetic treads A main module is composed of velocity-controlled motor, two pulleys for a timing belt, and a timing belt with segmented magnets (we call this a magnetic tread). Segmented magnets on the timing belt are used to achieve surface contact of the magnets when only the front wheel is in contact with the surface during transitions. Note that three modules are moved by rear-wheel drive to maintain tension on the bottom of the timing belts and to distribute the mass of the motors. Steering is not possible by the robot prototype; however, we believe the skid-steering is effective by using two tread modules in parallel. B. Compliant joints with torsion spring and torque-controlled motor In the research of Seo and Sitti [13], positive effects of compliant joints were verified by analysis and experiments. These positive effects are as follows: i) increased preloads on the front wheels of each module, ii) increased preloads on the front wheels during internal transitions, and iii) generation of torque in the direction of movement while the main modules do not have surface contact during external transitions. Even though there are many positive effects of passive compliant joints, several transitions are not possible due to the low compliant torques of the joints, especially at the rear joints in each module. There are four compliant joints between main modules in the Combot design. Note that the compliant joints connected to front modules are passively controlled by torsion springs, and the compliant joints connected to rear modules are actively-controlled by torque-controlled motors. Here, we changed the passive joints to active joints to give more controllability to the climbing robot. We can control the compliant torques according to the conditions: flat surface climbing, internal transitioning, and external transitioning. The compliant torques were determined on a case-by-case basis from experimental data. Using the compliance torques, the robot is expected to achieve internal and external transitioning as shown in Fig. 2. Note that the normal force to the surface was increased by the compliant torques during the internal transition, and the compliant torques generated motion to contact the surface to be transitioned during the external transition. Fig. 1. (a) Combot configuration. A, C, E are the main modules with magnetic treads; B, D, F are torque sensor to measure joint torque; and G is the active tail. There are five joints including the tail joint. The yellow joints (J1, J3) are passive joints achieved by torsion springs, and the blue joints (J2, J4, J5) are active joints achieved by torque-controlled motor. (b) Inner configuration of Combot. The three red motors are velocity-controlled motors that drive the magnetic treads, and the three blue motors are torque-controlled motors that generate compliant forces for the joints (J2, J4, J5 in (a)). The yellow and blue arrows denote the passive and active compliant torque directions, respectively. Fig. 2. Image of the Combot configuration during (a) internal, and (b) external transitioning. The yellow and blue arrows denote the direction of passive and active compliant torques, respectively. 2738
3 2739
4 2740
 motors (EC-max22, Maxon, Switzerland) with drivers (EPOS2 24/2, Maxon, Switzerland) for velocity control and torque control.")

5 A. Combot prototype IV. EXPERIMENTS The Combot prototype was assembled as shown in Fig. 7. We used direct current (DC) motors (EC-max22, Maxon, Switzerland) with drivers (EPOS2 24/2, Maxon, Switzerland) for velocity control and torque control. The joint torques are measured by torque sensor (TRT-50, Transducer, USA) with signal conditional (NI-USB-9237, National Instruments, USA). The robot and PC-based interface communicated through a USB cable device. Torsion springs were used to achieve passive compliance of the joints. Polymer magnets (HXP2.0, Misumi, Japan) were used at the tread. The size of the Combot was mm 3 excluding the tail length, and the weight of the Combot was 6.4 kg including battery, controller, torque sensor, and signal conditional. Fig. 7. Assembled Combot prototype. The flat surface climbing ability of the Combot was tested. The Combot ran on a horizontal surface at a speed of 22 cm/s. The Combot can climb every slope of flat surfaces, and the speeds of the Combot were measured to be 20 cm/s in vertical climbing and 20 cm/s in inverted climbing (running on ceiling). B. Paylaod capacity on flat surfaces. One of the main characteristics of the Combot is its high payload capacity. The payload capacity of the Combot was measured for vertical surface climbing. Photos of operation with payloads on a vertical surface are shown in Fig. 8 (Also in the Multimedia Extension). The Combot can carry a 10 kg payload at a speed of 8 cm/s in vertical surface climbing (which is 1.56 times the robot s weight). Note that in theoretical terms, the payloads are proportional to the contact area of the magnets, and the payloads are inversely s weight. Optimization to maximize the payloads of the Combot will be considered in future research. = 0s = 3.9s = 6.8s C. Internal/external transitions The transitioning capabilities of the Combot were verified by experiments. Combot can perform transitions and can carry heavy payloads. This feature increases the potential uses of the Combot, including complex structures with various equipments attached to the Combot platform. The transitioning postures are shown in Fig. 9 (Also in the Multimedia Extension). Figure 9 (a-h) shows the internal transitioning posture. During the internal transition, the modules were moved to the front wall sequentially. Note Fig 9 (a-f) is 0 to 90 degrees (a-f) and (g-h) is 270 to 0 degree internal transitions. Figure 9 (m-x) shows the external transitioning posture. During the external transition, the first module went into the air without any contacting surface, and then the first module made contact with the wall using the compliant joint torque. The sequence was repeated until the last module finished. V. CONCLUSION = 10s Fig. 8. Photos of vertical climbing of the Combot with 10 kg payloads. We present a new climbing robot design named Combot to achieve various transitioning abilities with heavy payloads. The robot consists of three main modules with a magnetic tread, passive and active compliant joints, and an active tail. The compliant joints do not require a complex controller based on kinematics or dynamics. The compliant forces help the robot to perform internal and external transitions. High payload capacity was achieved by enlarging the contact surface of the magnets using a tread mechanism for surface contact. The magnetic force, velocity, and torques were analyzed to ensure stable climbing and transitioning. Experiments were conducted to validate the abilities of the proposed climbing robot. Combot performs two internal transitions (0 to 90 degrees and 270 to 0 degrees) and two external transitions (0 to 270 degrees and 90 to 0 degrees). Payload of 10 kg was achieved during flat surface vertical climbing, which is 1.56 times of the robot weight. We believe the superior transitioning ability of the Combot and heavy payload ability can increase the number of potential applications of climbing robots. We plan to use the Combot platform to move heavy materials to high places in the ship building industry after achieving more transitions. Dynamic modeling and autonomous locomotion control are also required to use the Combot platform to other applications. 2741
, 270 to 0 degrees (g-h): a, g)")
 Second module finishes transition and front wheel of third module touches the")
, 90 to 0 degrees (s-x) : m, s) First module is")
 Third module is transitioning and the active tail supports")

![x) plants, Robotics and Computer-Integrated Manufacturing, vol. 11, no. 4, pp. 287-292, 1994. [4] T.](/docs-images/76/73232197/images/6-5.jpg "White, N. Hewer, B. L. Luk, J.")

![451-455, 1998. [5] Z. Qian, Y. Zhao, Z.](/docs-images/76/73232197/images/6-7.jpg "Fu, Development of Wall-climbing Robots with Sliding Suction Cups, in Proc.")
![IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 3417-3422, 2006. [6] H.](/docs-images/76/73232197/images/6-8.jpg "Zhang, J. Zhang, G. Zong, W. Wang, R.")





![4116-4121, 2009. [10] H. Kim, K. Se](/docs-images/76/73232197/images/6-14.jpg "o, K. Lee, J. Kim, and H. S.")

![Machines, Nagoya, Japan, pp. 439-446, 2010. [11] J. C. Grieco, M. Prieto, M. Armada, and P.](/docs-images/76/73232197/images/6-16.jpg "Gonzalez de Santos, Six-Legged Climbing Robot for High Payloads, in: Proc.")
![of IEEE International Conference on Control Applications, 1998, Trieste, Italy, pp. 446-450. [12] G.](/docs-images/76/73232197/images/6-17.jpg "Lee, K. Seo, J. Park, H. Kim, J. Kim, and T.")



6 a) b) c) d) e) f) g) h) i) j) k) l) m) n) o) p) q) r) s) t) u) v) w) Fig. 9. Photo snapshot during internal transitions ; 0 to 90 degrees (a-f), 270 to 0 degrees (g-h): a, g) guidance touches the wall; b, h) First module finishes transition; c, i) Second module is transitioning; d, j) Second module finishes transition and front wheel of third module touches the surface; e, k) Third module is transitioning; f, l) Third module finishes transition. During external transitions; 0 to 270 degrees (m-r), 90 to 0 degrees (s-x) : m, s) First module is transitioning; n, t) First module finishes transition; o, u) Second module is transitioning; p, v) Second module finishes transition; q, w) Third module is transitioning and the active tail supports the third module mass; r, x) Third module finishes transition and the robot starts running against the active tail force after the whole treads are attached to the surface. x) plants, Robotics and Computer-Integrated Manufacturing, vol. 11, no. 4, pp , [4] T. White, N. Hewer, B. L. Luk, J. Hazel, The design and operational performance of a climbing robot used for weld inspection in hazardous environments, in Proc. IEEE International Conference on Control Applications, pp , [5] Z. Qian, Y. Zhao, Z. Fu, Development of Wall-climbing Robots with Sliding Suction Cups, in Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems, pp , [6] H. Zhang, J. Zhang, G. Zong, W. Wang, R. Liu, Sky cleaner 3: A real pneumatic climbing robot for glass-wall cleaning, IEEE Robotics & Automation Magazine, vol. 13, no. 1, pp , [7] S. Nabulsi, J. F. Sarria, H. Montes, M. A. Armada, High-Resolution Indirect Feet Ground Interaction Measurement for Hydraulic-Legged Robots, IEEE Transaction on Instrumentation and Measurement, vol. 58, no. 10, pp , [8] T. Bretl, Motion planning of multi-limbed robots subject to equilibrium constraints: The free-climbing robot problem, International Journal of Robotics Research, vol. 25, no. 4, pp , [9] W. Fischer, G. Caprari, R. Siegwart, and R. Moser, Magnetic Wheeled Robot for Inspecting Complex Shaped Structures in Generator Housings and Similar Environments, in Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, USA, pp , [10] H. Kim, K. Seo, K. Lee, J. Kim, and H. S. Kim, "Development of a multi-body wall climbing robot with tracked wheel mechanism," In Proc. International conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines, Nagoya, Japan, pp , [11] J. C. Grieco, M. Prieto, M. Armada, and P. Gonzalez de Santos, Six-Legged Climbing Robot for High Payloads, in: Proc. of IEEE International Conference on Control Applications, 1998, Trieste, Italy, pp [12] G. Lee, K. Seo, J. Park, H. Kim, J. Kim, and T. Seo, -Wheeled Climbing Robot with Transitioning Ability and High-Payload Capacity, submitted to IEEE International Conference on Robotics and Biomimetics, Phuket Island, Thailand, [13] T. Seo and M. Sitti, Under-Actuated Tank-Like Climbing Robot With Various Transitioning Capabilities, in Proc. IEEE International Conference on Robotics and Automation, Shanghai, China, [14] M. Arai, Y. Tanaka, S. Hirose, H. Kuwahara, and S. Tsukui, Development of Souryu-IV and Souryu-V Serially Connected Crawler Vehicles for In-Rubble Searching Operations, Journal of Field Robotics, vol. 25, no. 1, pp , [15] O. Unver and M. Sitti, Tankbot: A Palm-size, Tank-like Climbing Robot using Soft Elastomer Adhesive Treads, International Journal of Robotics Research, vol. 29, no. 14, pp , REFERENCES [1] W. Shen, J. Gu, Y. Shen; Proposed wall climbing robot with permanent magnetic tracks for inspecting oil tanks, in Proc. IEEE International Conference on Mechatronics and Automation, vol. 4, pp , [2] L. P. Kalra, J. Guf, M. Meng, A Wall Climbing Robot for Oil Tank Inspection, in Proc. IEEE International Conference on Robotics and Biomimetics, pp , [3] L. Briones, P. Bustamante, and M. A. Serna, Robicen: A wall-climbing pneumatic robot for inspection in nuclear power 2742
Autonomous Stair Climbing Algorithm for a Small Four-Tracked Robot
 Autonomous Stair Climbing Algorithm for a Small Four-Tracked Robot Quy-Hung Vu, Byeong-Sang Kim, Jae-Bok Song Korea University 1 Anam-dong, Seongbuk-gu, Seoul, Korea vuquyhungbk@yahoo.com, lovidia@korea.ac.kr,
Autonomous Stair Climbing Algorithm for a Small Four-Tracked Robot Quy-Hung Vu, Byeong-Sang Kim, Jae-Bok Song Korea University 1 Anam-dong, Seongbuk-gu, Seoul, Korea vuquyhungbk@yahoo.com, lovidia@korea.ac.kr,
An In-pipe Robot with Multi-axial Differential Gear Mechanism
 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 2013. Tokyo, Japan An In-pipe Robot with Multi-axial Differential Gear Mechanism Ho Moon Kim, Jung Seok Suh,
2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 2013. Tokyo, Japan An In-pipe Robot with Multi-axial Differential Gear Mechanism Ho Moon Kim, Jung Seok Suh,
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
4R and 5R Parallel Mechanism Mobile Robots
 4R and 5R Parallel Mechanism Mobile Robots Tasuku Yamawaki Department of Mechano-Micro Engineering Tokyo Institute of Technology 4259 Nagatsuta, Midoriku Yokohama, Kanagawa, Japan Email: d03yamawaki@pms.titech.ac.jp
4R and 5R Parallel Mechanism Mobile Robots Tasuku Yamawaki Department of Mechano-Micro Engineering Tokyo Institute of Technology 4259 Nagatsuta, Midoriku Yokohama, Kanagawa, Japan Email: d03yamawaki@pms.titech.ac.jp
Design and Analysis of Modular Mobile Robot with Magnetic Wheels
 Design and Analysis of Modular Mobile Robot with Magnetic Wheels FEI YANQIONG SONG LIbO Research Institute of Robotics, Shanghai Jiaotong University, Dongchuan Road 800, Shanghai, 200240, P.R.China Email:fyq@sjtu.edu.cn
Design and Analysis of Modular Mobile Robot with Magnetic Wheels FEI YANQIONG SONG LIbO Research Institute of Robotics, Shanghai Jiaotong University, Dongchuan Road 800, Shanghai, 200240, P.R.China Email:fyq@sjtu.edu.cn
Double-track mobile robot for hazardous environment applications
 Advanced Robotics, Vol. 17, No. 5, pp. 447 459 (2003) Ó VSP and Robotics Society of Japan 2003. Also available online - www.vsppub.com Short paper Double-track mobile robot for hazardous environment applications
Advanced Robotics, Vol. 17, No. 5, pp. 447 459 (2003) Ó VSP and Robotics Society of Japan 2003. Also available online - www.vsppub.com Short paper Double-track mobile robot for hazardous environment applications
DEVELOPMENT OF THE HUMANOID ROBOT HUBO-FX-1
 DEVELOPMENT OF THE HUMANOID ROBOT HUBO-FX-1 Jungho Lee, KAIST, Republic of Korea, jungho77@kaist.ac.kr Jung-Yup Kim, KAIST, Republic of Korea, kirk1@mclab3.kaist.ac.kr Ill-Woo Park, KAIST, Republic of
DEVELOPMENT OF THE HUMANOID ROBOT HUBO-FX-1 Jungho Lee, KAIST, Republic of Korea, jungho77@kaist.ac.kr Jung-Yup Kim, KAIST, Republic of Korea, kirk1@mclab3.kaist.ac.kr Ill-Woo Park, KAIST, Republic of
Design and Control of the BUAA Four-Fingered Hand
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Toward Micro Wall-Climbing Robots Using Biomimetic Fibrillar Adhesives
 Research Collection Conference Paper Toward Micro Wall-Climbing Robots Using Biomimetic Fibrillar Adhesives Author(s): Greuter, Matthias; Shah, Gaurav; Caprari, Gilles; Tâche, Fabien; Siegwart, Roland;
Research Collection Conference Paper Toward Micro Wall-Climbing Robots Using Biomimetic Fibrillar Adhesives Author(s): Greuter, Matthias; Shah, Gaurav; Caprari, Gilles; Tâche, Fabien; Siegwart, Roland;
A PROTOTYPE CLIMBING ROBOT FOR INSPECTION OF COMPLEX FERROUS STRUCTURES
 A PROTOTYPE CLIMBING ROBOT FOR INSPECTION OF COMPLEX FERROUS STRUCTURES G. PETERS, D. PAGANO, D.K. LIU ARC Centre of Excellence for Autonomous Systems, University of Technology, Sydney Australia, POBox
A PROTOTYPE CLIMBING ROBOT FOR INSPECTION OF COMPLEX FERROUS STRUCTURES G. PETERS, D. PAGANO, D.K. LIU ARC Centre of Excellence for Autonomous Systems, University of Technology, Sydney Australia, POBox
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
AN HYBRID LOCOMOTION SERVICE ROBOT FOR INDOOR SCENARIOS 1
 AN HYBRID LOCOMOTION SERVICE ROBOT FOR INDOOR SCENARIOS 1 Jorge Paiva Luís Tavares João Silva Sequeira Institute for Systems and Robotics Institute for Systems and Robotics Instituto Superior Técnico,
AN HYBRID LOCOMOTION SERVICE ROBOT FOR INDOOR SCENARIOS 1 Jorge Paiva Luís Tavares João Silva Sequeira Institute for Systems and Robotics Institute for Systems and Robotics Instituto Superior Técnico,
Wall-Stability Analysis of a Climbing Robot Hu BinLiang1, a, Chen GuoLiang2, b, Chen GuangCheng2, c
 4th ational Conference on Electrical, Electronics and Computer Engineering (CEECE 015) Wall-Stability Analysis of a Climbing Robot Hu BinLiang1, a, Chen GuoLiang, b, Chen GuangCheng, c 1 School of Mechanical
4th ational Conference on Electrical, Electronics and Computer Engineering (CEECE 015) Wall-Stability Analysis of a Climbing Robot Hu BinLiang1, a, Chen GuoLiang, b, Chen GuangCheng, c 1 School of Mechanical
Development of Drum CVT for a Wire-Driven Robot Hand
 The 009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 009 St. Louis, USA Development of Drum CVT for a Wire-Driven Robot Hand Kojiro Matsushita, Shinpei Shikanai, and
The 009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 009 St. Louis, USA Development of Drum CVT for a Wire-Driven Robot Hand Kojiro Matsushita, Shinpei Shikanai, and
A Novel Modular Climbing Caterpillar Using Low-frequency Vibrating Passive Suckers
 A Novel Modular Climbing Caterpillar Using Low-frequency Vibrating Passive Suckers H. X. Zhang, Member, IEEE, J. González-Gómez, S.Y. Chen, Member, IEEE, W. Wang, R. Liu, D. Li, J. W. Zhang Abstract This
A Novel Modular Climbing Caterpillar Using Low-frequency Vibrating Passive Suckers H. X. Zhang, Member, IEEE, J. González-Gómez, S.Y. Chen, Member, IEEE, W. Wang, R. Liu, D. Li, J. W. Zhang Abstract This
Magnetic Wall Climbing Robot for Thin Surfaces with Specific Obstacles
 Magnetic Wall Climbing Robot for Thin Surfaces with Specific Obstacles Wolfgang Fischer, Fabien Tâche, Roland Siegwart To cite this version: Wolfgang Fischer, Fabien Tâche, Roland Siegwart. Magnetic Wall
Magnetic Wall Climbing Robot for Thin Surfaces with Specific Obstacles Wolfgang Fischer, Fabien Tâche, Roland Siegwart To cite this version: Wolfgang Fischer, Fabien Tâche, Roland Siegwart. Magnetic Wall
TREE CLIMBING ROBOT (TREEBOT)
") 9 JEST-M, Vol 4, Issue 4, Jan-2015 TREE CLIMBING ROBOT (TREEBOT) Electronics and Communication department, MVJ College of Engineering srivatsa12ster@gmail.com, vinoop.u@gmail.com, satish.mvjce@gmail.com,
9 JEST-M, Vol 4, Issue 4, Jan-2015 TREE CLIMBING ROBOT (TREEBOT) Electronics and Communication department, MVJ College of Engineering srivatsa12ster@gmail.com, vinoop.u@gmail.com, satish.mvjce@gmail.com,
Development of Novel Robots with Modular Methodology
 The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Development of Novel Robots with Modular Methodology Yisheng Guan, Li, Jiang, Xianmin Zhang,
The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Development of Novel Robots with Modular Methodology Yisheng Guan, Li, Jiang, Xianmin Zhang,
Dynamic analysis and control of a Hybrid serial/cable driven robot for lower-limb rehabilitation
 Dynamic analysis and control of a Hybrid serial/cable driven robot for lower-limb rehabilitation M. Ismail 1, S. Lahouar 2 and L. Romdhane 1,3 1 Mechanical Laboratory of Sousse (LMS), National Engineering
Dynamic analysis and control of a Hybrid serial/cable driven robot for lower-limb rehabilitation M. Ismail 1, S. Lahouar 2 and L. Romdhane 1,3 1 Mechanical Laboratory of Sousse (LMS), National Engineering
Development of a Walking Support Robot with Velocity-based Mechanical Safety Devices*
 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 2013. Tokyo, Japan Development of a Walking Support Robot with Velocity-based Mechanical Safety Devices* Yoshihiro
2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 2013. Tokyo, Japan Development of a Walking Support Robot with Velocity-based Mechanical Safety Devices* Yoshihiro
Verification of Intelligent Planting Robot Arm Design Using Dynamics Analysis and Simulation Kee-Jin Park 1 *, Byeong-Soo Kim 1 and Jeong-Ho Yun 2
 2016 International Conference on Sustainable Energy, Environment and Information Engineering (SEEIE 2016) ISBN: 978-1-60595-337-3 Verification of Intelligent Planting Robot Arm Design Using Dynamics Analysis
2016 International Conference on Sustainable Energy, Environment and Information Engineering (SEEIE 2016) ISBN: 978-1-60595-337-3 Verification of Intelligent Planting Robot Arm Design Using Dynamics Analysis
Speed Control of a Pneumatic Monopod using a Neural Network
 Tech. Rep. IRIS-2-43 Institute for Robotics and Intelligent Systems, USC, 22 Speed Control of a Pneumatic Monopod using a Neural Network Kale Harbick and Gaurav S. Sukhatme! Robotic Embedded Systems Laboratory
Tech. Rep. IRIS-2-43 Institute for Robotics and Intelligent Systems, USC, 22 Speed Control of a Pneumatic Monopod using a Neural Network Kale Harbick and Gaurav S. Sukhatme! Robotic Embedded Systems Laboratory
Shuffle Traveling of Humanoid Robots
 Shuffle Traveling of Humanoid Robots Masanao Koeda, Masayuki Ueno, and Takayuki Serizawa Abstract Recently, many researchers have been studying methods for the stepless slip motion of humanoid robots.
Shuffle Traveling of Humanoid Robots Masanao Koeda, Masayuki Ueno, and Takayuki Serizawa Abstract Recently, many researchers have been studying methods for the stepless slip motion of humanoid robots.
INNOVATIVE DESIGN OF A ROUGH TERRAIN NONHOLONOMIC MOBILE ROBOT
 MULTIBODY DYNAMICS 005 ECCOMAS Thematic Conference J.M. Goicolea J.Cuadrado J.C.García Orden (eds.) Madrid Spain 4 June 005 INNOVATIVE DESIGN OF A ROUGH TERRAIN NONHOLONOMIC MOBILE ROBOT Arman Hajati Mansour
MULTIBODY DYNAMICS 005 ECCOMAS Thematic Conference J.M. Goicolea J.Cuadrado J.C.García Orden (eds.) Madrid Spain 4 June 005 INNOVATIVE DESIGN OF A ROUGH TERRAIN NONHOLONOMIC MOBILE ROBOT Arman Hajati Mansour
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League
 Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League Chung-Hsien Kuo 1, Hung-Chyun Chou 1, Jui-Chou Chung 1, Po-Chung Chia 2, Shou-Wei Chi 1, Yu-De Lien 1 1 Department
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League Chung-Hsien Kuo 1, Hung-Chyun Chou 1, Jui-Chou Chung 1, Po-Chung Chia 2, Shou-Wei Chi 1, Yu-De Lien 1 1 Department
Application of Gain Scheduling Technique to a 6-Axis Articulated Robot using LabVIEW R
 Application of Gain Scheduling Technique to a 6-Axis Articulated Robot using LabVIEW R ManSu Kim #,1, WonJee Chung #,2, SeungWon Jeong #,3 # School of Mechatronics, Changwon National University Changwon,
Application of Gain Scheduling Technique to a 6-Axis Articulated Robot using LabVIEW R ManSu Kim #,1, WonJee Chung #,2, SeungWon Jeong #,3 # School of Mechatronics, Changwon National University Changwon,
Robot Joint Angle Control Based on Self Resonance Cancellation Using Double Encoders
 Robot Joint Angle Control Based on Self Resonance Cancellation Using Double Encoders Akiyuki Hasegawa, Hiroshi Fujimoto and Taro Takahashi 2 Abstract Research on the control using a load-side encoder for
Robot Joint Angle Control Based on Self Resonance Cancellation Using Double Encoders Akiyuki Hasegawa, Hiroshi Fujimoto and Taro Takahashi 2 Abstract Research on the control using a load-side encoder for
Self-learning Assistive Exoskeleton with Sliding Mode Admittance Control
 213 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 213. Tokyo, Japan Self-learning Assistive Exoskeleton with Sliding Mode Admittance Control Tzu-Hao Huang, Ching-An
213 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 213. Tokyo, Japan Self-learning Assistive Exoskeleton with Sliding Mode Admittance Control Tzu-Hao Huang, Ching-An
Pushing Methods for Working Six-Legged Robots Capable of Locomotion and Manipulation in Three Modes
 010 IEEE International Conerence on Robotics and Automation Anchorage Convention District May 3-8, 010, Anchorage, Alaska, USA Pushing Methods or Working Six-Legged Robots Capable o Locomotion and Manipulation
010 IEEE International Conerence on Robotics and Automation Anchorage Convention District May 3-8, 010, Anchorage, Alaska, USA Pushing Methods or Working Six-Legged Robots Capable o Locomotion and Manipulation
EFFECT OF INERTIAL TAIL ON YAW RATE OF 45 GRAM LEGGED ROBOT *
 EFFECT OF INERTIAL TAIL ON YAW RATE OF 45 GRAM LEGGED ROBOT * N.J. KOHUT, D. W. HALDANE Department of Mechanical Engineering, University of California, Berkeley Berkeley, CA 94709, USA D. ZARROUK, R.S.
EFFECT OF INERTIAL TAIL ON YAW RATE OF 45 GRAM LEGGED ROBOT * N.J. KOHUT, D. W. HALDANE Department of Mechanical Engineering, University of California, Berkeley Berkeley, CA 94709, USA D. ZARROUK, R.S.
A Semi-Minimalistic Approach to Humanoid Design
 International Journal of Scientific and Research Publications, Volume 2, Issue 4, April 2012 1 A Semi-Minimalistic Approach to Humanoid Design Hari Krishnan R., Vallikannu A.L. Department of Electronics
International Journal of Scientific and Research Publications, Volume 2, Issue 4, April 2012 1 A Semi-Minimalistic Approach to Humanoid Design Hari Krishnan R., Vallikannu A.L. Department of Electronics
Chapter 1 Introduction to Robotics
 Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
FUNDAMENTALS ROBOT TECHNOLOGY. An Introduction to Industrial Robots, T eleoperators and Robot Vehicles. D J Todd. Kogan Page
 FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
Skyworker: Robotics for Space Assembly, Inspection and Maintenance
 Skyworker: Robotics for Space Assembly, Inspection and Maintenance Sarjoun Skaff, Carnegie Mellon University Peter J. Staritz, Carnegie Mellon University William Whittaker, Carnegie Mellon University Abstract
Skyworker: Robotics for Space Assembly, Inspection and Maintenance Sarjoun Skaff, Carnegie Mellon University Peter J. Staritz, Carnegie Mellon University William Whittaker, Carnegie Mellon University Abstract
Wednesday, October 29, :00-04:00pm EB: 3546D. TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof.
 Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Remote Control Based Hybrid-Structure Robot Design for Home Security Applications
 Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems October 9-15, 2006, Beijing, China Remote Control Based Hybrid-Structure Robot Design for Home Security Applications
Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems October 9-15, 2006, Beijing, China Remote Control Based Hybrid-Structure Robot Design for Home Security Applications
Development of Shape-Variable Hand Unit for Quadruped Tracked Mobile Robot
 Development of Shape-Variable Hand Unit for Quadruped Tracked Mobile Robot Toyomi Fujita Department of Electrical and Electronic Engineering, Tohoku Institute of Technology 35-1 Yagiyama Kasumi-cho, Taihaku-ku,
Development of Shape-Variable Hand Unit for Quadruped Tracked Mobile Robot Toyomi Fujita Department of Electrical and Electronic Engineering, Tohoku Institute of Technology 35-1 Yagiyama Kasumi-cho, Taihaku-ku,
DEVELOPMENT OF A HUMANOID ROBOT FOR EDUCATION AND OUTREACH. K. Kelly, D. B. MacManus, C. McGinn
 DEVELOPMENT OF A HUMANOID ROBOT FOR EDUCATION AND OUTREACH K. Kelly, D. B. MacManus, C. McGinn Department of Mechanical and Manufacturing Engineering, Trinity College, Dublin 2, Ireland. ABSTRACT Robots
DEVELOPMENT OF A HUMANOID ROBOT FOR EDUCATION AND OUTREACH K. Kelly, D. B. MacManus, C. McGinn Department of Mechanical and Manufacturing Engineering, Trinity College, Dublin 2, Ireland. ABSTRACT Robots
SnakeSIM: a Snake Robot Simulation Framework for Perception-Driven Obstacle-Aided Locomotion
 : a Snake Robot Simulation Framework for Perception-Driven Obstacle-Aided Locomotion Filippo Sanfilippo 1, Øyvind Stavdahl 1 and Pål Liljebäck 1 1 Dept. of Engineering Cybernetics, Norwegian University
: a Snake Robot Simulation Framework for Perception-Driven Obstacle-Aided Locomotion Filippo Sanfilippo 1, Øyvind Stavdahl 1 and Pål Liljebäck 1 1 Dept. of Engineering Cybernetics, Norwegian University
A Posture Control for Two Wheeled Mobile Robots
 Transactions on Control, Automation and Systems Engineering Vol., No. 3, September, A Posture Control for Two Wheeled Mobile Robots Hyun-Sik Shim and Yoon-Gyeoung Sung Abstract In this paper, a posture
Transactions on Control, Automation and Systems Engineering Vol., No. 3, September, A Posture Control for Two Wheeled Mobile Robots Hyun-Sik Shim and Yoon-Gyeoung Sung Abstract In this paper, a posture
UKEMI: Falling Motion Control to Minimize Damage to Biped Humanoid Robot
 Proceedings of the 2002 IEEE/RSJ Intl. Conference on Intelligent Robots and Systems EPFL, Lausanne, Switzerland October 2002 UKEMI: Falling Motion Control to Minimize Damage to Biped Humanoid Robot Kiyoshi
Proceedings of the 2002 IEEE/RSJ Intl. Conference on Intelligent Robots and Systems EPFL, Lausanne, Switzerland October 2002 UKEMI: Falling Motion Control to Minimize Damage to Biped Humanoid Robot Kiyoshi
Humanoids. Lecture Outline. RSS 2010 Lecture # 19 Una-May O Reilly. Definition and motivation. Locomotion. Why humanoids? What are humanoids?
 Humanoids RSS 2010 Lecture # 19 Una-May O Reilly Lecture Outline Definition and motivation Why humanoids? What are humanoids? Examples Locomotion RSS 2010 Humanoids Lecture 1 1 Why humanoids? Capek, Paris
Humanoids RSS 2010 Lecture # 19 Una-May O Reilly Lecture Outline Definition and motivation Why humanoids? What are humanoids? Examples Locomotion RSS 2010 Humanoids Lecture 1 1 Why humanoids? Capek, Paris
Challenges of Precision Assembly with a Miniaturized Robot
 Challenges of Precision Assembly with a Miniaturized Robot Arne Burisch, Annika Raatz, and Jürgen Hesselbach Technische Universität Braunschweig, Institute of Machine Tools and Production Technology Langer
Challenges of Precision Assembly with a Miniaturized Robot Arne Burisch, Annika Raatz, and Jürgen Hesselbach Technische Universität Braunschweig, Institute of Machine Tools and Production Technology Langer
Autonomous Cooperative Robots for Space Structure Assembly and Maintenance
 Proceeding of the 7 th International Symposium on Artificial Intelligence, Robotics and Automation in Space: i-sairas 2003, NARA, Japan, May 19-23, 2003 Autonomous Cooperative Robots for Space Structure
Proceeding of the 7 th International Symposium on Artificial Intelligence, Robotics and Automation in Space: i-sairas 2003, NARA, Japan, May 19-23, 2003 Autonomous Cooperative Robots for Space Structure
Mechanical Design of Humanoid Robot Platform KHR-3 (KAIST Humanoid Robot - 3: HUBO) *
 *") Proceedings of 2005 5th IEEE-RAS International Conference on Humanoid Robots Mechanical Design of Humanoid Robot Platform KHR-3 (KAIST Humanoid Robot - 3: HUBO) * Ill-Woo Park, Jung-Yup Kim, Jungho Lee
Proceedings of 2005 5th IEEE-RAS International Conference on Humanoid Robots Mechanical Design of Humanoid Robot Platform KHR-3 (KAIST Humanoid Robot - 3: HUBO) * Ill-Woo Park, Jung-Yup Kim, Jungho Lee
Motion Control of Excavator with Tele-Operated System
 26th International Symposium on Automation and Robotics in Construction (ISARC 2009) Motion Control of Excavator with Tele-Operated System Dongnam Kim 1, Kyeong Won Oh 2, Daehie Hong 3#, Yoon Ki Kim 4
26th International Symposium on Automation and Robotics in Construction (ISARC 2009) Motion Control of Excavator with Tele-Operated System Dongnam Kim 1, Kyeong Won Oh 2, Daehie Hong 3#, Yoon Ki Kim 4
ARTIFICIAL INTELLIGENCE - ROBOTICS
 ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
New Arc-welding Robots
 New Arc-welding Robots Tatsuji MINATO *1, Taichi IGARASHI *1, Motoaki MURAKAMI *2, Takashi WADA *3 *1 Welding System Dept., Technical Center, Welding Business *2 Technical Center, Welding Business *3 Production
New Arc-welding Robots Tatsuji MINATO *1, Taichi IGARASHI *1, Motoaki MURAKAMI *2, Takashi WADA *3 *1 Welding System Dept., Technical Center, Welding Business *2 Technical Center, Welding Business *3 Production
CLIMBING WITH STRUCTURED DRY ADHESIVES: STICKY ROBOTS FOR SCALING SMOOTH VERTICAL SURFACES
 CLIMBING WITH STRUCTURED DRY ADHESIVES: STICKY ROBOTS FOR SCALING SMOOTH VERTICAL SURFACES Michael Henrey 1, Jeff Krahn 1, Ausama Ahmed 1, Kjetil Wormnes 2, and Carlo Menon 1 1 MENRVA Lab, School of Engineering
CLIMBING WITH STRUCTURED DRY ADHESIVES: STICKY ROBOTS FOR SCALING SMOOTH VERTICAL SURFACES Michael Henrey 1, Jeff Krahn 1, Ausama Ahmed 1, Kjetil Wormnes 2, and Carlo Menon 1 1 MENRVA Lab, School of Engineering
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2014 Humanoid League
 Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2014 Humanoid League Chung-Hsien Kuo, Yu-Cheng Kuo, Yu-Ping Shen, Chen-Yun Kuo, Yi-Tseng Lin 1 Department of Electrical Egineering, National
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2014 Humanoid League Chung-Hsien Kuo, Yu-Cheng Kuo, Yu-Ping Shen, Chen-Yun Kuo, Yi-Tseng Lin 1 Department of Electrical Egineering, National
PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS
 PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS Bernard Franklin 1, Sachin.P 2, Jagadish.S 3, Shaista Noor 4, Rajashekhar C. Biradar 5 1,2,3,4,5 School of Electronics
PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS Bernard Franklin 1, Sachin.P 2, Jagadish.S 3, Shaista Noor 4, Rajashekhar C. Biradar 5 1,2,3,4,5 School of Electronics
Design and Experiments of Advanced Leg Module (HRP-2L) for Humanoid Robot (HRP-2) Development
 for Humanoid Robot (HRP-2) Development") Proceedings of the 2002 IEEE/RSJ Intl. Conference on Intelligent Robots and Systems EPFL, Lausanne, Switzerland October 2002 Design and Experiments of Advanced Leg Module (HRP-2L) for Humanoid Robot (HRP-2)
Proceedings of the 2002 IEEE/RSJ Intl. Conference on Intelligent Robots and Systems EPFL, Lausanne, Switzerland October 2002 Design and Experiments of Advanced Leg Module (HRP-2L) for Humanoid Robot (HRP-2)
Development of a Humanoid Biped Walking Robot Platform KHR-1 - Initial Design and Its Performance Evaluation
 Development of a Humanoid Biped Walking Robot Platform KHR-1 - Initial Design and Its Performance Evaluation Jung-Hoon Kim, Seo-Wook Park, Ill-Woo Park, and Jun-Ho Oh Machine Control Laboratory, Department
Development of a Humanoid Biped Walking Robot Platform KHR-1 - Initial Design and Its Performance Evaluation Jung-Hoon Kim, Seo-Wook Park, Ill-Woo Park, and Jun-Ho Oh Machine Control Laboratory, Department
MAGNETIC LEVITATION SUSPENSION CONTROL SYSTEM FOR REACTION WHEEL
 IMPACT: International Journal of Research in Engineering & Technology (IMPACT: IJRET) ISSN 2321-8843 Vol. 1, Issue 4, Sep 2013, 1-6 Impact Journals MAGNETIC LEVITATION SUSPENSION CONTROL SYSTEM FOR REACTION
IMPACT: International Journal of Research in Engineering & Technology (IMPACT: IJRET) ISSN 2321-8843 Vol. 1, Issue 4, Sep 2013, 1-6 Impact Journals MAGNETIC LEVITATION SUSPENSION CONTROL SYSTEM FOR REACTION
The Design and Realization of Intelligent Glass Climbing-Cleaning Robot
 Applied Mechanics and Materials Online: 2013-09-03 ISSN: 1662-7482, Vols. 401-403, pp 1720-1723 doi:10.4028/www.scientific.net/amm.401-403.1720 2013 Trans Tech Publications, Switzerland The Design and
Applied Mechanics and Materials Online: 2013-09-03 ISSN: 1662-7482, Vols. 401-403, pp 1720-1723 doi:10.4028/www.scientific.net/amm.401-403.1720 2013 Trans Tech Publications, Switzerland The Design and
GUIDELINES FOR DESIGN LOW COST MICROMECHANICS. L. Ruiz-Huerta, A. Caballero Ruiz, E. Kussul
 GUIDELINES FOR DESIGN LOW COST MICROMECHANICS L. Ruiz-Huerta, A. Caballero Ruiz, E. Kussul Center of Applied Sciences and Technological Development, UNAM Laboratory of Mechatronics and Micromechanics,
GUIDELINES FOR DESIGN LOW COST MICROMECHANICS L. Ruiz-Huerta, A. Caballero Ruiz, E. Kussul Center of Applied Sciences and Technological Development, UNAM Laboratory of Mechatronics and Micromechanics,
Birth of An Intelligent Humanoid Robot in Singapore
 Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
Estimation of Absolute Positioning of mobile robot using U-SAT
 Estimation of Absolute Positioning of mobile robot using U-SAT Su Yong Kim 1, SooHong Park 2 1 Graduate student, Department of Mechanical Engineering, Pusan National University, KumJung Ku, Pusan 609-735,
Estimation of Absolute Positioning of mobile robot using U-SAT Su Yong Kim 1, SooHong Park 2 1 Graduate student, Department of Mechanical Engineering, Pusan National University, KumJung Ku, Pusan 609-735,
Biologically Inspired Robot Manipulator for New Applications in Automation Engineering
 Preprint of the paper which appeared in the Proc. of Robotik 2008, Munich, Germany, June 11-12, 2008 Biologically Inspired Robot Manipulator for New Applications in Automation Engineering Dipl.-Biol. S.
Preprint of the paper which appeared in the Proc. of Robotik 2008, Munich, Germany, June 11-12, 2008 Biologically Inspired Robot Manipulator for New Applications in Automation Engineering Dipl.-Biol. S.
Converting Motion between Different Types of Humanoid Robots Using Genetic Algorithms
 Converting Motion between Different Types of Humanoid Robots Using Genetic Algorithms Mari Nishiyama and Hitoshi Iba Abstract The imitation between different types of robots remains an unsolved task for
Converting Motion between Different Types of Humanoid Robots Using Genetic Algorithms Mari Nishiyama and Hitoshi Iba Abstract The imitation between different types of robots remains an unsolved task for
Korea Humanoid Robot Projects
 Korea Humanoid Robot Projects Jun Ho Oh HUBO Lab., KAIST KOREA Humanoid Projects(~2001) A few humanoid robot projects were existed. Most researches were on dynamic and kinematic simulations for walking
Korea Humanoid Robot Projects Jun Ho Oh HUBO Lab., KAIST KOREA Humanoid Projects(~2001) A few humanoid robot projects were existed. Most researches were on dynamic and kinematic simulations for walking
SELF-BALANCING MOBILE ROBOT TILTER
 Tomislav Tomašić Andrea Demetlika Prof. dr. sc. Mladen Crneković ISSN xxx-xxxx SELF-BALANCING MOBILE ROBOT TILTER Summary UDC 007.52, 62-523.8 In this project a remote controlled self-balancing mobile
Tomislav Tomašić Andrea Demetlika Prof. dr. sc. Mladen Crneković ISSN xxx-xxxx SELF-BALANCING MOBILE ROBOT TILTER Summary UDC 007.52, 62-523.8 In this project a remote controlled self-balancing mobile
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Sloshing Damping Control in a Cylindrical Container on a Wheeled Mobile Robot Using Dual-Swing Active-Vibration Reduction
 Sloshing Damping Control in a Cylindrical Container on a Wheeled Mobile Robot Using Dual-Swing Active-Vibration Reduction Masafumi Hamaguchi and Takao Taniguchi Department of Electronic and Control Systems
Sloshing Damping Control in a Cylindrical Container on a Wheeled Mobile Robot Using Dual-Swing Active-Vibration Reduction Masafumi Hamaguchi and Takao Taniguchi Department of Electronic and Control Systems
sin( x m cos( The position of the mass point D is specified by a set of state variables, (θ roll, θ pitch, r) related to the Cartesian coordinates by:
 related to the Cartesian coordinates by:") Research Article International Journal of Current Engineering and Technology ISSN 77-46 3 INPRESSCO. All Rights Reserved. Available at http://inpressco.com/category/ijcet Modeling improvement of a Humanoid
Research Article International Journal of Current Engineering and Technology ISSN 77-46 3 INPRESSCO. All Rights Reserved. Available at http://inpressco.com/category/ijcet Modeling improvement of a Humanoid
Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface
 Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface Kei Okada 1, Yasuyuki Kino 1, Fumio Kanehiro 2, Yasuo Kuniyoshi 1, Masayuki Inaba 1, Hirochika Inoue 1 1
Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface Kei Okada 1, Yasuyuki Kino 1, Fumio Kanehiro 2, Yasuo Kuniyoshi 1, Masayuki Inaba 1, Hirochika Inoue 1 1
Robo-Sloth: A Rope-Climbing Robot
 Robo-Sloth: A Rope-Climbing Robot Sandeep Urankar, Pranjal Jain, Anurag Singh, Anupam Saxena and Bhaskar Dasgupta Department of Mechanical Engineering Indian Institute of Technology Kanpur 208016 Abstract
Robo-Sloth: A Rope-Climbing Robot Sandeep Urankar, Pranjal Jain, Anurag Singh, Anupam Saxena and Bhaskar Dasgupta Department of Mechanical Engineering Indian Institute of Technology Kanpur 208016 Abstract
RoboCup TDP Team ZSTT
 RoboCup 2018 - TDP Team ZSTT Jaesik Jeong 1, Jeehyun Yang 1, Yougsup Oh 2, Hyunah Kim 2, Amirali Setaieshi 3, Sourosh Sedeghnejad 3, and Jacky Baltes 1 1 Educational Robotics Centre, National Taiwan Noremal
RoboCup 2018 - TDP Team ZSTT Jaesik Jeong 1, Jeehyun Yang 1, Yougsup Oh 2, Hyunah Kim 2, Amirali Setaieshi 3, Sourosh Sedeghnejad 3, and Jacky Baltes 1 1 Educational Robotics Centre, National Taiwan Noremal
Development of Running Robot Based on Charge Coupled Device
 Development of Running Robot Based on Charge Coupled Device Hongzhang He School of Mechanics, North China Electric Power University, Baoding071003, China. hhzh_ncepu@163.com Abstract Robot technology is
Development of Running Robot Based on Charge Coupled Device Hongzhang He School of Mechanics, North China Electric Power University, Baoding071003, China. hhzh_ncepu@163.com Abstract Robot technology is
Precise Analytical Solution for the Peak Gain of LLC Resonant Converters
 680 Journal of Power Electronics, Vol. 0, No. 6, November 200 JPE 0-6-4 Precise Analytical Solution for the Peak Gain of LLC Resonant Converters Sung-Soo Hong, Sang-Ho Cho, Chung-Wook Roh, and Sang-Kyoo
680 Journal of Power Electronics, Vol. 0, No. 6, November 200 JPE 0-6-4 Precise Analytical Solution for the Peak Gain of LLC Resonant Converters Sung-Soo Hong, Sang-Ho Cho, Chung-Wook Roh, and Sang-Kyoo
School of Computer and Information Science, Southwest University, Chongqing, China
 3rd International Conference on Materials Engineering, Manufacturing Technology and Control (ICMEMTC 2016) The design and obstacle-overcoming analysis of multiphase connecting- rod wheeled robot Chen-yang
3rd International Conference on Materials Engineering, Manufacturing Technology and Control (ICMEMTC 2016) The design and obstacle-overcoming analysis of multiphase connecting- rod wheeled robot Chen-yang
PID CONTROLLERS DESIGN APPLIED TO POSITIONING OF BALL ON THE STEWART PLATFORM
 DOI 1.2478/ama-214-39 PID CONTROLLERS DESIGN APPLIED TO POSITIONING OF BALL ON THE STEWART PLATFORM Andrzej KOSZEWNIK *, Kamil TROC *, Maciej SŁOWIK * * Faculty of Mechanical Engineering, Bialystok University
DOI 1.2478/ama-214-39 PID CONTROLLERS DESIGN APPLIED TO POSITIONING OF BALL ON THE STEWART PLATFORM Andrzej KOSZEWNIK *, Kamil TROC *, Maciej SŁOWIK * * Faculty of Mechanical Engineering, Bialystok University
New Solution for Walking Robot
 New Solution for Walking Robot Tadeusz Mikolajczyk 1,a*, Tomasz Fas 1,b, Tomasz Malinowski 1,c, ukasz Romanowski 1,d 1 University of Technology and Life Sciences, Department of Production Engineering 85-876
New Solution for Walking Robot Tadeusz Mikolajczyk 1,a*, Tomasz Fas 1,b, Tomasz Malinowski 1,c, ukasz Romanowski 1,d 1 University of Technology and Life Sciences, Department of Production Engineering 85-876
Parallel Robot Projects at Ohio University
 Parallel Robot Projects at Ohio University Robert L. Williams II with graduate students: John Hall, Brian Hopkins, Atul Joshi, Josh Collins, Jigar Vadia, Dana Poling, and Ron Nyzen And Special Thanks to:
Parallel Robot Projects at Ohio University Robert L. Williams II with graduate students: John Hall, Brian Hopkins, Atul Joshi, Josh Collins, Jigar Vadia, Dana Poling, and Ron Nyzen And Special Thanks to:
RAPID PROTOTYPING AND EMBEDDED CONTROL FOR AN ANTHROPOMORPHIC ROBOTIC HAND
 The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania RAPID PROTOTYPING AND EMBEDDED CONTROL FOR AN ANTHROPOMORPHIC ROBOTIC
The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania RAPID PROTOTYPING AND EMBEDDED CONTROL FOR AN ANTHROPOMORPHIC ROBOTIC
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists. International authors and editors
 We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,500 108,000 1.7 M Open access books available International authors and editors Downloads Our
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,500 108,000 1.7 M Open access books available International authors and editors Downloads Our
Study on the Development of High Transfer Robot Additional-Axis for Hot Stamping Press Process
 Study on the Development of High Transfer Robot Additional-Axis for Hot Stamping Press Process Kee-Jin Park1, Seok-Hong Oh2, Eun-Sil Jang1, Byeong-Soo Kim1, and Jin-Dae Kim1 1 Daegu Mechatronics & Materials
Study on the Development of High Transfer Robot Additional-Axis for Hot Stamping Press Process Kee-Jin Park1, Seok-Hong Oh2, Eun-Sil Jang1, Byeong-Soo Kim1, and Jin-Dae Kim1 1 Daegu Mechatronics & Materials
Stationary Torque Replacement for Evaluation of Active Assistive Devices using Humanoid
 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids) Cancun, Mexico, Nov 15-17, 2016 Stationary Torque Replacement for Evaluation of Active Assistive Devices using Humanoid Takahiro
2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids) Cancun, Mexico, Nov 15-17, 2016 Stationary Torque Replacement for Evaluation of Active Assistive Devices using Humanoid Takahiro
Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path
 Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path Taichi Yamada 1, Yeow Li Sa 1 and Akihisa Ohya 1 1 Graduate School of Systems and Information Engineering, University of Tsukuba, 1-1-1,
Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path Taichi Yamada 1, Yeow Li Sa 1 and Akihisa Ohya 1 1 Graduate School of Systems and Information Engineering, University of Tsukuba, 1-1-1,
HexGen HEX HL Hexapod Six-DOF Positioning System
 HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
2280. Optimization of the control scheme for human extremity exoskeleton
 2280. Optimization of the control scheme for human extremity exoskeleton Yang Li 1, Cheng Xu 2, Xiaorong Guan 3, Zhong Li 4 School of Mechanical Engineering 105, Nanjing University of Science and Technology,
2280. Optimization of the control scheme for human extremity exoskeleton Yang Li 1, Cheng Xu 2, Xiaorong Guan 3, Zhong Li 4 School of Mechanical Engineering 105, Nanjing University of Science and Technology,
MASTER SHIFU. STUDENT NAME: Vikramadityan. M ROBOT NAME: Master Shifu COURSE NAME: Intelligent Machine Design Lab
 MASTER SHIFU STUDENT NAME: Vikramadityan. M ROBOT NAME: Master Shifu COURSE NAME: Intelligent Machine Design Lab COURSE NUMBER: EEL 5666C TA: Andy Gray, Nick Cox INSTRUCTORS: Dr. A. Antonio Arroyo, Dr.
MASTER SHIFU STUDENT NAME: Vikramadityan. M ROBOT NAME: Master Shifu COURSE NAME: Intelligent Machine Design Lab COURSE NUMBER: EEL 5666C TA: Andy Gray, Nick Cox INSTRUCTORS: Dr. A. Antonio Arroyo, Dr.
ACTUATORS AND SENSORS. Joint actuating system. Servomotors. Sensors
 ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
Step Climbing and Descending for a Manual Wheelchair with a Network Care Robot
 Step Climbing and Descending for a Manual Wheelchair with a Network Care Robot Hidetoshi Ikeda, Hikaru Kanda and Nobuyuki Yamashima Department of Mechanical Engineering Toyama National College of Technology
Step Climbing and Descending for a Manual Wheelchair with a Network Care Robot Hidetoshi Ikeda, Hikaru Kanda and Nobuyuki Yamashima Department of Mechanical Engineering Toyama National College of Technology
A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
 International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
Adaptive Action Selection without Explicit Communication for Multi-robot Box-pushing
 Adaptive Action Selection without Explicit Communication for Multi-robot Box-pushing Seiji Yamada Jun ya Saito CISS, IGSSE, Tokyo Institute of Technology 4259 Nagatsuta, Midori, Yokohama 226-8502, JAPAN
Adaptive Action Selection without Explicit Communication for Multi-robot Box-pushing Seiji Yamada Jun ya Saito CISS, IGSSE, Tokyo Institute of Technology 4259 Nagatsuta, Midori, Yokohama 226-8502, JAPAN
Head Office: Meieki, Nakamura-ku, Nagoya City , Japan TEL: +81(0) FAX: +81(0) Press Release
 FAX: +81(0) Press Release") Press Release Head Office: 2-35-16 Meieki, Nakamura-ku, Nagoya City 450-0002, Japan TEL: +81(0)52-587-1811 FAX: +81(0)52-587-1818 August 10, 2017 Highest Accuracy Ever Achieved - Vertical Machining Center
Press Release Head Office: 2-35-16 Meieki, Nakamura-ku, Nagoya City 450-0002, Japan TEL: +81(0)52-587-1811 FAX: +81(0)52-587-1818 August 10, 2017 Highest Accuracy Ever Achieved - Vertical Machining Center
DEVELOPMENT OF A BIPED ROBOT
 Joan Batlle, Enric Hospital, Jeroni Salellas and Marc Carreras Institut d Informàtica i Aplicacions Universitat de Girona Avda. Lluis Santaló s/n 173 Girona tel: 34.972.41.84.74 email: jbatlle, ehospit,
Joan Batlle, Enric Hospital, Jeroni Salellas and Marc Carreras Institut d Informàtica i Aplicacions Universitat de Girona Avda. Lluis Santaló s/n 173 Girona tel: 34.972.41.84.74 email: jbatlle, ehospit,
Humanoid Robot HanSaRam: Recent Development and Compensation for the Landing Impact Force by Time Domain Passivity Approach
 Humanoid Robot HanSaRam: Recent Development and Compensation for the Landing Impact Force by Time Domain Passivity Approach Yong-Duk Kim, Bum-Joo Lee, Seung-Hwan Choi, In-Won Park, and Jong-Hwan Kim Robot
Humanoid Robot HanSaRam: Recent Development and Compensation for the Landing Impact Force by Time Domain Passivity Approach Yong-Duk Kim, Bum-Joo Lee, Seung-Hwan Choi, In-Won Park, and Jong-Hwan Kim Robot
Modeling and Experimental Studies of a Novel 6DOF Haptic Device
 Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
HexGen HEX HL Hexapod Six-DOF Positioning System
 HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
Technical Cognitive Systems
 Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
University of Michigan 1630 Cram Circle Apt. #13Ann Arbor, MI, 48105, ,
 EDUCATION Doctor of Philosophy in Mechanical Engineering Apr. 2016, Ann Arbor, MI Specialization: Proposal and Analysis of Human, Machine Control toward Rehabilitation Advisor: Richard B. Gillespie, Ph.D.
EDUCATION Doctor of Philosophy in Mechanical Engineering Apr. 2016, Ann Arbor, MI Specialization: Proposal and Analysis of Human, Machine Control toward Rehabilitation Advisor: Richard B. Gillespie, Ph.D.
A Passive System Approach to Increase the Energy Efficiency in Walk Movements Based in a Realistic Simulation Environment
 A Passive System Approach to Increase the Energy Efficiency in Walk Movements Based in a Realistic Simulation Environment José L. Lima, José A. Gonçalves, Paulo G. Costa and A. Paulo Moreira Abstract This
A Passive System Approach to Increase the Energy Efficiency in Walk Movements Based in a Realistic Simulation Environment José L. Lima, José A. Gonçalves, Paulo G. Costa and A. Paulo Moreira Abstract This
Chapter 1. Robot and Robotics PP
 Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
HexGen HEX HL Hexapod Six-DOF Positioning System
 HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
Kid-Size Humanoid Soccer Robot Design by TKU Team
 Kid-Size Humanoid Soccer Robot Design by TKU Team Ching-Chang Wong, Kai-Hsiang Huang, Yueh-Yang Hu, and Hsiang-Min Chan Department of Electrical Engineering, Tamkang University Tamsui, Taipei, Taiwan E-mail:
Kid-Size Humanoid Soccer Robot Design by TKU Team Ching-Chang Wong, Kai-Hsiang Huang, Yueh-Yang Hu, and Hsiang-Min Chan Department of Electrical Engineering, Tamkang University Tamsui, Taipei, Taiwan E-mail:
MODELLING OF A MAGNETIC ADHESION ROBOT FOR NDT INSPECTION OF LARGE METAL STRUCTURES
 MODELLING OF A MAGNETIC ADHESION ROBOT FOR NDT INSPECTION OF LARGE METAL STRUCTURES G. SHIRKOOHI and Z. ZHAO School of Engineering, London South Bank University, 103 Borough Road, London SE1 0AA United
MODELLING OF A MAGNETIC ADHESION ROBOT FOR NDT INSPECTION OF LARGE METAL STRUCTURES G. SHIRKOOHI and Z. ZHAO School of Engineering, London South Bank University, 103 Borough Road, London SE1 0AA United
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball
 Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
ZJUDancer Team Description Paper
 ZJUDancer Team Description Paper Tang Qing, Xiong Rong, Li Shen, Zhan Jianbo, and Feng Hao State Key Lab. of Industrial Technology, Zhejiang University, Hangzhou, China Abstract. This document describes
ZJUDancer Team Description Paper Tang Qing, Xiong Rong, Li Shen, Zhan Jianbo, and Feng Hao State Key Lab. of Industrial Technology, Zhejiang University, Hangzhou, China Abstract. This document describes