FLL Robot Design Workshop
|
|
|
- Dorcas Cameron
- 5 years ago
- Views:
Transcription


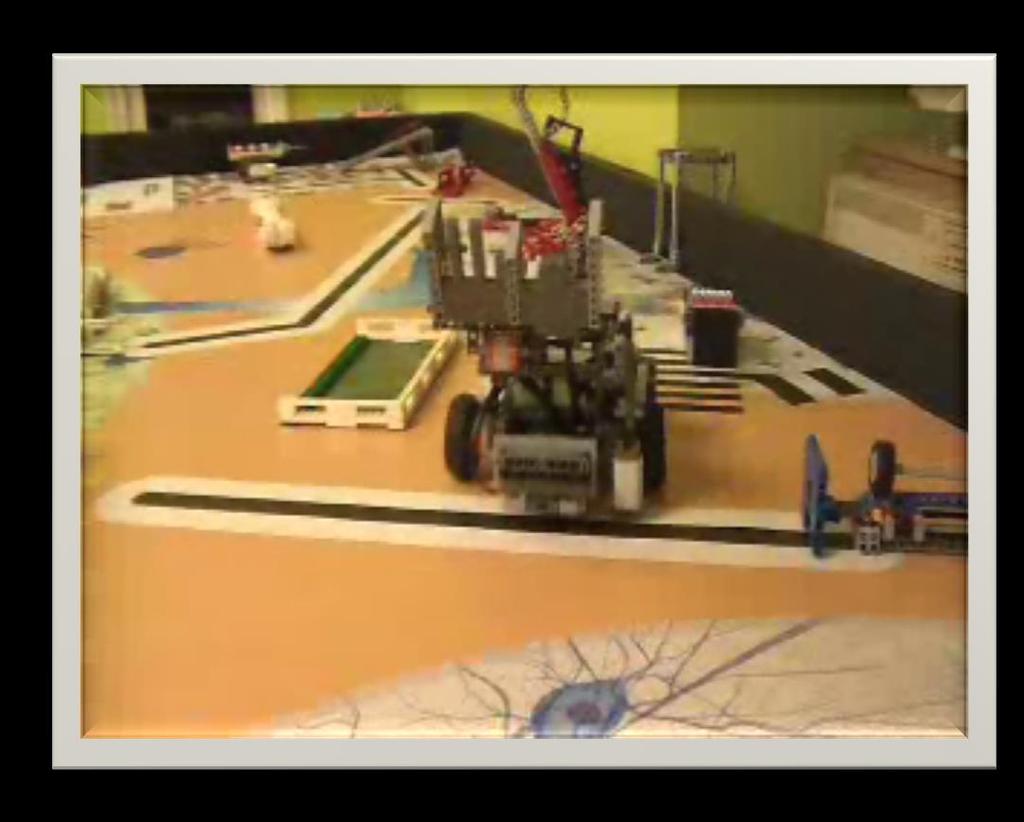
1 FLL Robot Design Workshop Tool Design and Mechanism Prepared by Dr. C. H. (Tony) Lin Principal Engineer Tire and Vehicle Mechanics Goodyear Tire & Rubber Company
2 Description Mechanism (Attachment) is extending a simple robot into a powerful robot that can control and change its environment. Learning about how properly design attachments for your robot to meet a particular challenge can make for a winning robot.
3 A Systematic Design Methodology 1. Identify the functional requirements, based on mission requirements, of a class of mechanisms of interest. 2. Determine the nature of motion (i.e., planar, spherical, or spatial mechanism), degrees of freedom (DOF), type, and complexity of the mechanisms. 3. Identify the structural characteristics associated with some of the functional requirements. 4. Enumerate all possible kinematic structures that satisfy the structural characteristics using graph theory and combinatorial analysis. 5. Sketch the corresponding mechanisms and evaluate each of them qualitatively in terms of its capability in satisfying the remaining functional requirements. This results in a set of feasible mechanisms. 6. Select a most promising mechanism for dimensional synthesis, design optimization, computer simulation, prototype demonstration, and documentation 7. Enter the Building phase.
4 Robot Design and Construction Planning what does the team want to achieve and how will they achieve it? Let the kids do it! Design iteration Brainstorm (what to build) Design (how to build it) Build it! Test it! Repeat until it s perfect (or good enough) Trade-offs: Good, Quick, Cheap pick two (at most)! Quality Schedule Budget
 etc.")
 Three-pins instead")

5 How to make things stiff Use your hypotenuse! Use right triangles 3-4-5, , , (5,12,13) etc. Interlock bricks & beams Two thin bricks in between Lock with vertical beam Triple beams (double shear) Three-pins instead of two pins Technic Design School Courtesy of Team RED Robot Construction and Design



6 Demonstration Three-pins vs. two-pins when used with more than three beams Two pin structures bend Three-pins much more rigid Stacked beams with grey two-pins Stacked beams with black two-pins Stacked beams with black/blue three-pins Courtesy of Team RED Robot Construction and Design
7 How to make things strong Use large parts Don t use several small parts when one large part will suffice Stiffness decreases with the number of parts used to do a task Use L-beams to form right angles Do not use two beams and a pin, use an L Make structures out of beams, not axles when possible Axles are more flexible than beams consistency and precision Courtesy of Team RED Robot Construction and Design


8 Stiffness v. Length Demo If we need something longer than 15 Two beams overlapped More overlap = stronger beam 2 x 11 2 x 15 Courtesy of Team RED Robot Construction and Design
9 Classification of Mechanisms No DOF Mechanisms Planar Mechanisms (1-2 DOF) Planar Linkages Geared Mechanisms Chain & Pulley Spatial Mechanisms (1-3 DOF) Spherical Mechanisms (>= 3 DOF) * Remember your robot can move
10 Examples
11 Examples
12 FLL Robot Attachments (Standard Kits) Passive Attachments Pushing attachment Hooking attachment Dumping attachment Collecting attachment Spring-loaded attachment Power Attachments Grabbing attachment Lifting attachment Pushing attachment Turning attachment Hooking attachment Dumping attachment Collecting attachment


13 Passive Attachments Pushing attachment Flat surface or Angled surfaces Move game elements independently or in a container (Flat surface ) Move game elements out of robot s path (Angled surfaces)


14 Example: 2010 M&M s design


15 Complete Examples


16 Exercise #1 Build Push Plate (15 minutes) Pins Guide Attachment BOM Instruction


17 Passive Attachments Hooking attachment Fork and Hook attachments Collecting special objects Can be combined with power assist to lift, sweep and drop


18 Example: 2010 M&M s design

19 Complete Examples


20 Exercise #2 Hooks(15 minutes) BOM Instruction


21 Passive Attachments Dumping attachment Container to move game elements to specific location Based on basic four-bar linkage or simple hinge mechanism
22 Example: 2011 Brazing Brains design
 BOM")
23 Exercise #3 Four-Bar Carrier(30 minutes) BOM Instruction


24 Passive Attachments Collecting attachment Object trap - Box opens only inward Sweeper moving object in certain direction Capture objects to return to base


25 Example: 2011 Brazing Brains design
 BOM Instruction")
26 Exercise #4 Trap Box (30 minutes) BOM Instruction


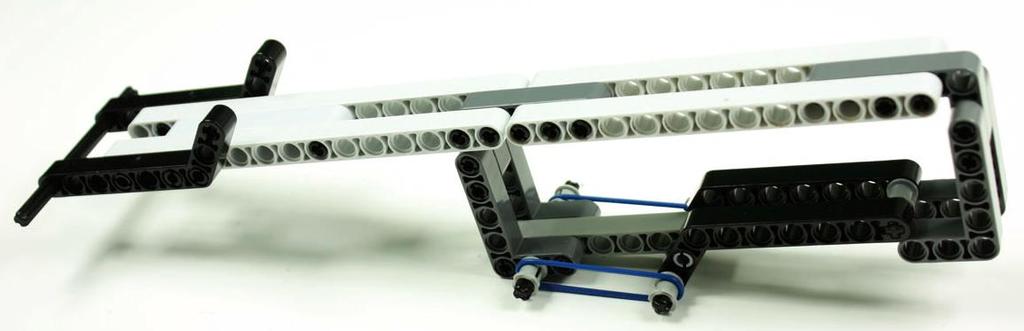
27 Passive Attachments Spring-loaded attachment Snap or pre-loaded Collecting, hitting, or turn Combining with other mechanisms or trigger


28 Example: 2011 Brazing Brains design
 BOM")
29 Exercise #5 Spring Loaded Hook (20 minutes) BOM Instruction

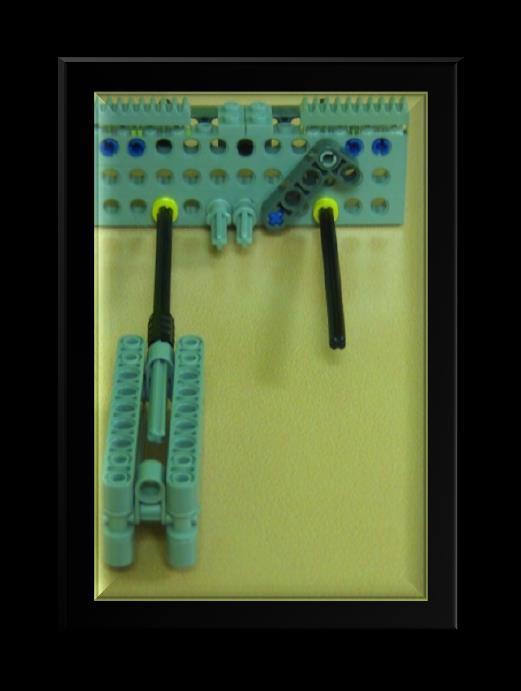
 BOM")


30 Exercise #6 Spring Loaded Trigger (20 minutes) BOM Instruction Courtesy of Team RED Robot Construction and Design
31 FLL Robot Attachments Passive Attachments Pushing attachment Hooking attachment Dumping attachment Collecting attachment Spring-loaded attachment Power Attachments Grabbing attachment Lifting attachment Pushing attachment Turning attachment Hooking attachment Dumping attachment Collecting attachment
32 Power Attachments Using third motor as power source to generate controllable motion Attachments would be designed to connect to the fixed motor Considerations: Motor location Moving space Moving speed & torque
33 Power Attachments Grabbing and Collecting attachment Claw, Vise Grip, Trap


34 Power Attachments Lifting, Hooking and Dumping attachment Lever, Forklift, Trap




35 Example: 2010 M&M s design
 BOM")
36 Exercise #7 Forklift(40 minutes) BOM Instruction


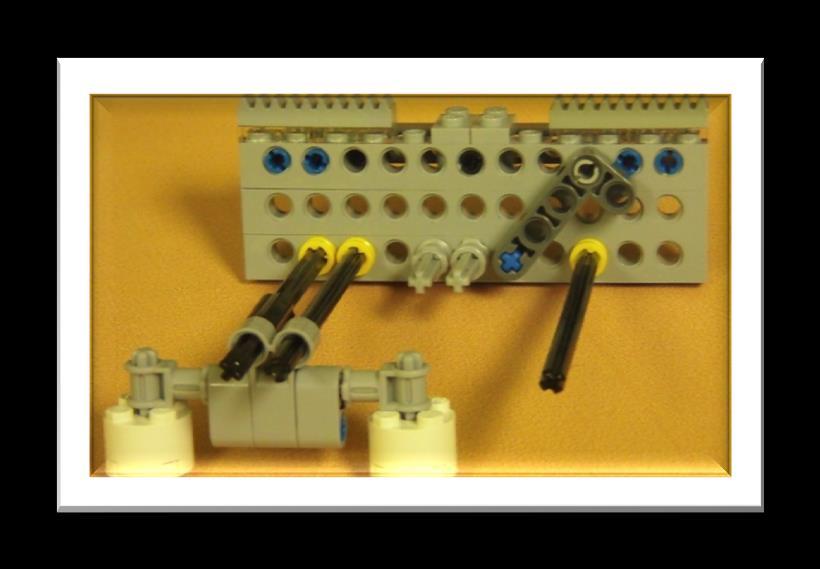
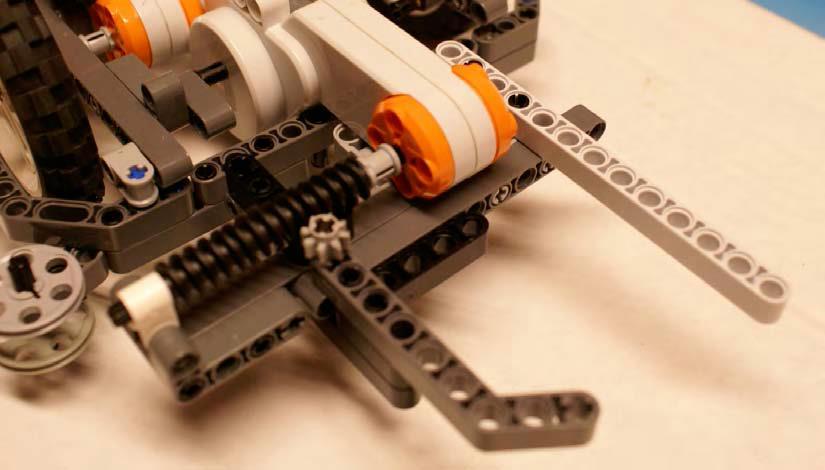
37 Power Attachments Pushing attachment LEGO Actuator or Custom Actuator



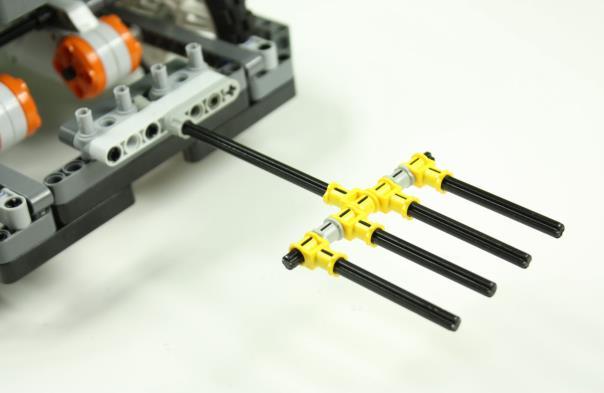
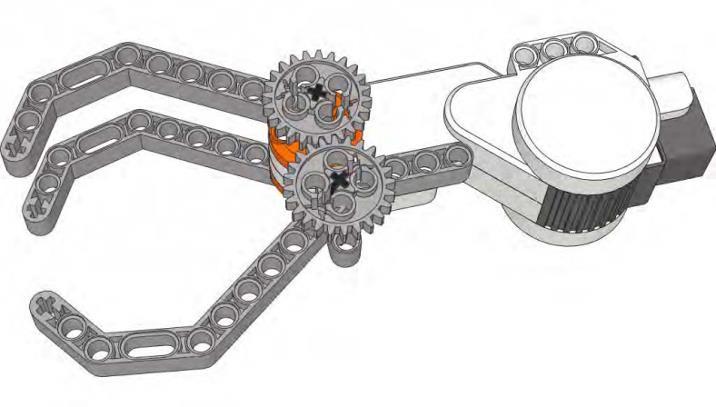
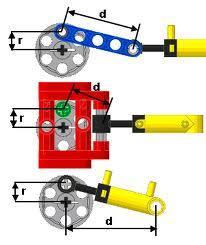
38 Power Attachments Turning attachment Controllable turning action Define turning angle, direction and arm length Gear type, ratio and direction
 Torque Will only apply a given level of torque before slipping Worm Changing direction, speed, and torque (it s a 1 tooth gear)")
39 Gears and Usage Regular spur gears Gearing up or down, changing speed or torque, Converting rotary to linear motion (rack and pinion) Bevel gears and crown gears Change shaft direction by 90 degrees Note direction of rotation changes (4 tooth is also good for this task) Torque Will only apply a given level of torque before slipping Worm Changing direction, speed, and torque (it s a 1 tooth gear) Eliminates back driving Gear Ratio = No. Teeth Input /No. Teeth Output


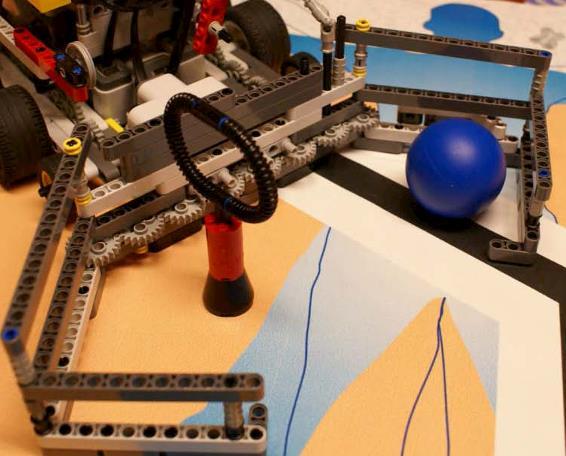
40 Example: 2011 Brazing Brains design


41 Exercise #8 Gear & Grip (40 minutes) BOM Instruction
42 Example Videos 3PS7nIihOw Passive and power attachments 7RiDjcm5Dg Power attachment forklift & actuator T5_ziLhENE&feature=related Passive and power attachments * Identify mechanisms that had been used within each video.
 Powerful Partial controllable motion - On/off switch with pneumatic")
43 FLL Robot Attachments (Non-Standard Kits) Pneumatics operation Pneumatics give the robot another power source of manipulation besides LEGO NXT servos (motor) Powerful Partial controllable motion - On/off switch with pneumatic actuator


44 Examples lifting attachment
45 References Mechanism Design : Enumeration of Kinematic Structures According to Function, Lung-Wen Tsai Winning Design! LEGO Mindstorms NXT, David J. Trobaugh Designing for FLL with Lego Mindstorms Hints and Tips, Team Unlimited, FTC0001, unlimited.syraweb.org Robot Mechanisms and Mechanical Devices Illustrated, Paul E. Sandin Building Robots with LEGO MINDSTORMS, Mario Ferrari, Giulio Ferrari, and Ralph Hempel
FLL Coaches Clinic Chassis and Attachments. Patrick R. Michaud
 FLL Coaches Clinic Chassis and Attachments Patrick R. Michaud pmichaud@pobox.com Erik Jonsson School of Engineering and Computer Science University of Texas at Dallas September 23, 2017 Presentation Outline
FLL Coaches Clinic Chassis and Attachments Patrick R. Michaud pmichaud@pobox.com Erik Jonsson School of Engineering and Computer Science University of Texas at Dallas September 23, 2017 Presentation Outline
LEGO 2D Planar Manipulator (with zero offset between Z1 and Z2 axes of rotation)
") LEGO 2D Planar Manipulator (with zero offset between Z1 and Z2 axes of rotation) Uses some parts not found in NXT Mindstorms Kit 9797 e.g. 2 nd Turntable, 1x12 plates, and 15100: Pin-hole Friction Peg.
LEGO 2D Planar Manipulator (with zero offset between Z1 and Z2 axes of rotation) Uses some parts not found in NXT Mindstorms Kit 9797 e.g. 2 nd Turntable, 1x12 plates, and 15100: Pin-hole Friction Peg.
The Nomenclature and Geometry of LEGO
 The Nomenclature and Geometry of LEGO AN OVERVIEW OF LEGO EV3 MINDSTORMS ELEMENTS AND HOW THEY WORK TOGETHER UPDATED 9/27/2015 Required Stuff Please do not wander the building. Rest Rooms Location. Food
The Nomenclature and Geometry of LEGO AN OVERVIEW OF LEGO EV3 MINDSTORMS ELEMENTS AND HOW THEY WORK TOGETHER UPDATED 9/27/2015 Required Stuff Please do not wander the building. Rest Rooms Location. Food
Deriving Consistency from LEGOs
 Deriving Consistency from LEGOs What we have learned in 6 years of FLL and 7 years of Lego Robotics by Austin and Travis Schuh 1 2006 Austin and Travis Schuh, all rights reserved Objectives Basic Building
Deriving Consistency from LEGOs What we have learned in 6 years of FLL and 7 years of Lego Robotics by Austin and Travis Schuh 1 2006 Austin and Travis Schuh, all rights reserved Objectives Basic Building
Spare Parts. Contents. Contents Contents
 Spare Parts 2013 Spare Parts Contents Contents Contents LEGO Education StoryStarter 3 LEGO Education WeDo 4 Machines and Mechanisms 5 LEGO MINDSTORMS Education 6-8 TETRIX by Pitsco 9-16 LEGOeducation.us
Spare Parts 2013 Spare Parts Contents Contents Contents LEGO Education StoryStarter 3 LEGO Education WeDo 4 Machines and Mechanisms 5 LEGO MINDSTORMS Education 6-8 TETRIX by Pitsco 9-16 LEGOeducation.us
Design and Technologies: Engineering principles and systems Motion, mechanisms and motors
 Sample assessment task Year level 7 Learning area Subject Title of task Task details Description of task Type of assessment Purpose of assessment Assessment strategy Evidence to be collected Technologies
Sample assessment task Year level 7 Learning area Subject Title of task Task details Description of task Type of assessment Purpose of assessment Assessment strategy Evidence to be collected Technologies
the complete parts reference bricks
 the complete parts reference Here s a detailed overview of all the pieces in your LEGO BOOST kit. You can also identify LEGO elements precisely by their LEGO ID, which is printed on the LEGO BOOST test
the complete parts reference Here s a detailed overview of all the pieces in your LEGO BOOST kit. You can also identify LEGO elements precisely by their LEGO ID, which is printed on the LEGO BOOST test
Worksheet Answer Key: Tree Measurer Projects > Tree Measurer
 Worksheet Answer Key: Tree Measurer Projects > Tree Measurer Maroon = exact answers Magenta = sample answers Construct: Test Questions: Caliper Reading Reading #1 Reading #2 1492 1236 1. Subtract to find
Worksheet Answer Key: Tree Measurer Projects > Tree Measurer Maroon = exact answers Magenta = sample answers Construct: Test Questions: Caliper Reading Reading #1 Reading #2 1492 1236 1. Subtract to find
Appendix Course Notes MIT Course Organizers. Chapter 7: LEGO Design
 EECS40/43 Appendix 4 Appendix 4 6.70 1999 Course Notes MIT 6.70 Course Organizers Chapter 7: LEGO Design 1 Chapter 7 LEGO Design When you're rst introduced to the LEGO Technic system, you may be amazed
EECS40/43 Appendix 4 Appendix 4 6.70 1999 Course Notes MIT 6.70 Course Organizers Chapter 7: LEGO Design 1 Chapter 7 LEGO Design When you're rst introduced to the LEGO Technic system, you may be amazed
LEGO Mindstorms Class: Lesson 1
 LEGO Mindstorms Class: Lesson 1 Some Important LEGO Mindstorm Parts Brick Ultrasonic Sensor Light Sensor Touch Sensor Color Sensor Motor Gears Axle Straight Beam Angled Beam Cable 1 The NXT-G Programming
LEGO Mindstorms Class: Lesson 1 Some Important LEGO Mindstorm Parts Brick Ultrasonic Sensor Light Sensor Touch Sensor Color Sensor Motor Gears Axle Straight Beam Angled Beam Cable 1 The NXT-G Programming
The Wheels Module The Seats Module Integrate the seats and Wheels modules Ferris Wheel base Build the Gear System...
 Alternate Motorization Kit The Wheels Module... 2 The Seats Module... 3 Integrate the seats and Wheels modules... 4 Ferris Wheel base... 5 Build the Gear System... 7 Ferris Wheel Final Integration!!!...
Alternate Motorization Kit The Wheels Module... 2 The Seats Module... 3 Integrate the seats and Wheels modules... 4 Ferris Wheel base... 5 Build the Gear System... 7 Ferris Wheel Final Integration!!!...
Final Review Powerpoint
 Final Review Powerpoint Simple Machines- A device that makes work easier, faster, or changes the direction of force using few or no moving parts Rube Goldberg- a complex machine that does a simple task
Final Review Powerpoint Simple Machines- A device that makes work easier, faster, or changes the direction of force using few or no moving parts Rube Goldberg- a complex machine that does a simple task
LS Creative Learnings Pvt Ltd. STEM-Robotics Education. Report for Sep S.B. Patil Public School, Pune
 LS Creative s Pvt Ltd. STEM-Robotics Education Report for Sep 2017 S.B. Patil Public School, Pune 1 Sept 2017 Grade: III Helicopter To understand about different modes of transportation like airways. Science
LS Creative s Pvt Ltd. STEM-Robotics Education Report for Sep 2017 S.B. Patil Public School, Pune 1 Sept 2017 Grade: III Helicopter To understand about different modes of transportation like airways. Science
Chassis & Attachments 101. Chassis Overview
 Chassis & Attachments 101 Chassis Overview 2016 1 Introductions Rest rooms location. Food and Drink: Complementary bottled water. Snacks available for purchase from UME FTC teams. Cell phones. Today presentation
Chassis & Attachments 101 Chassis Overview 2016 1 Introductions Rest rooms location. Food and Drink: Complementary bottled water. Snacks available for purchase from UME FTC teams. Cell phones. Today presentation
Hare and Snail Challenges READY, GO!
 Hare and Snail Challenges READY, GO! Pre-Activity Quiz 1. What are some design considerations to make a fast robot? 2. What are some design considerations to make a slow robot? 2 Pre-Activity Quiz Answers
Hare and Snail Challenges READY, GO! Pre-Activity Quiz 1. What are some design considerations to make a fast robot? 2. What are some design considerations to make a slow robot? 2 Pre-Activity Quiz Answers
RC Servo Interface. Figure Bipolar amplifier connected to a large DC motor
 The bipolar amplifier is well suited for controlling motors for vehicle propulsion. Figure 12-45 shows a good-sized 24VDC motor that runs nicely on 13.8V from a lead acid battery based power supply. You
The bipolar amplifier is well suited for controlling motors for vehicle propulsion. Figure 12-45 shows a good-sized 24VDC motor that runs nicely on 13.8V from a lead acid battery based power supply. You
Ultimatum. Robotics Unit Lesson 5. Overview
 Robotics Unit Lesson 5 Ultimatum Overview In this final challenge the students will deploy their TETRIX rescue robot up the mountain to rescue the stranded mountain climbers. First the rescue robot has
Robotics Unit Lesson 5 Ultimatum Overview In this final challenge the students will deploy their TETRIX rescue robot up the mountain to rescue the stranded mountain climbers. First the rescue robot has
BEST DESIGN PROCESS Page 1 of 16 BEST DESIGN PROCESS
 BEST DESIGN PROCESS Page 1 of 16 BEST DESIGN PROCESS BEST DESIGN PROCESS Page 2 of 16 The four main phases of design are: BEST DESIGN PROCESS Phase What You Get Example Conceptual Design Concept Four wheels,
BEST DESIGN PROCESS Page 1 of 16 BEST DESIGN PROCESS BEST DESIGN PROCESS Page 2 of 16 The four main phases of design are: BEST DESIGN PROCESS Phase What You Get Example Conceptual Design Concept Four wheels,
Designing Winning Robots
 Designing Winning Robots Canon Reeves Arkansas School for Mathematics, Sciences, and the Arts Designing Winning Robots 1 Introduction Robots tend to be rather complex by nature, and with so many possible
Designing Winning Robots Canon Reeves Arkansas School for Mathematics, Sciences, and the Arts Designing Winning Robots 1 Introduction Robots tend to be rather complex by nature, and with so many possible
PoeBot Building Instructions CCISD. Upper Gripper. Lower Gripper/ Spatula. PoeBot Instructions PLTW. Clear Creek ISD
 Upper Gripper Lower Gripper/ Spatula PoeBot Instructions PLTW Clear Creek ISD 1. Chasis Construction (Split Group with half starting Step 1 and half starting Step 13.) Note: These flat bearings are offset
Upper Gripper Lower Gripper/ Spatula PoeBot Instructions PLTW Clear Creek ISD 1. Chasis Construction (Split Group with half starting Step 1 and half starting Step 13.) Note: These flat bearings are offset
HYDRAULIC CONTROL DETAILS PARTS LIST
 Always give model number, serial number and part number when ordering repair parts. HYDRAULIC CONTROL DETAILS PARTS LIST REF NO. PART NUMBER DESCRIPTION 1 101939 Hydraulic Tank 2 101940 Hydraulic Tank
Always give model number, serial number and part number when ordering repair parts. HYDRAULIC CONTROL DETAILS PARTS LIST REF NO. PART NUMBER DESCRIPTION 1 101939 Hydraulic Tank 2 101940 Hydraulic Tank
S B Patil Public School, Pune
 LS Creative Learnings Pvt Ltd., STEM-Robotics Education Report for Jan 2018 S B Patil Public School, Pune 1 Grade: III Jan 2017 Simple machine Inclined plane Lesson To understand about types of simple
LS Creative Learnings Pvt Ltd., STEM-Robotics Education Report for Jan 2018 S B Patil Public School, Pune 1 Grade: III Jan 2017 Simple machine Inclined plane Lesson To understand about types of simple
TeacherGeek Sumo Bot Vehicle Application Guide
 SUMO BOT VEHICLE EXAMPLE BUILD TeacherGeek Sumo Bot Vehicle Application Guide TeacherGeek, 011 SUMO BOT VEHICLE EXAMPLE BUILD TeacherGeek TeacherGeek s Sumo Bot Vehicle Activity is the perfect way to encourage
SUMO BOT VEHICLE EXAMPLE BUILD TeacherGeek Sumo Bot Vehicle Application Guide TeacherGeek, 011 SUMO BOT VEHICLE EXAMPLE BUILD TeacherGeek TeacherGeek s Sumo Bot Vehicle Activity is the perfect way to encourage
BROWNCOATS Team 7842 Engineering Notebook - Rover Ruckus
 Date Location Start Time End Time Week # September 14, 2018 AvaLAN Wireless 2:00 p.m. 6:00 p.m. 2 Meeting Goals: Discuss Brainstorming Ideas, Continue assembly of drive train Team Members in Attendance:
Date Location Start Time End Time Week # September 14, 2018 AvaLAN Wireless 2:00 p.m. 6:00 p.m. 2 Meeting Goals: Discuss Brainstorming Ideas, Continue assembly of drive train Team Members in Attendance:
Screw. Introduction This Rokenbok STEM-Maker lesson will use the following steps to learn about the screw. Learning Objectives. Resources.
 Screw Progression: Applications in Design & Engineering - Section 6 Curriculum Packet v2.0 Introduction This Rokenbok STEM-Maker lesson will use the following steps to learn about the screw. 1. Learn 2.
Screw Progression: Applications in Design & Engineering - Section 6 Curriculum Packet v2.0 Introduction This Rokenbok STEM-Maker lesson will use the following steps to learn about the screw. 1. Learn 2.
The Design of key mechanical functions for a super multi-dof and extendable Space Robotic Arm
 The Design of key mechanical functions for a super multi-dof and extendable Space Robotic Arm Kent Yoshikawa*, Yuichiro Tanaka**, Mitsushige Oda***, Hiroki Nakanishi**** *Tokyo Institute of Technology,
The Design of key mechanical functions for a super multi-dof and extendable Space Robotic Arm Kent Yoshikawa*, Yuichiro Tanaka**, Mitsushige Oda***, Hiroki Nakanishi**** *Tokyo Institute of Technology,
Tire Chain Kit. Replacing Shear Pins. Weight Kits. Drift Cutter
 Replacing Shear Pins The augers are secured to the spiral shaft with two shear pins and cotter pins. If the auger should strike a foreign object or ice jam, the snow thrower is designed so that the pins
Replacing Shear Pins The augers are secured to the spiral shaft with two shear pins and cotter pins. If the auger should strike a foreign object or ice jam, the snow thrower is designed so that the pins
Chassis & Attachments 101. Part 1: Chassis Overview
 Chassis & Attachments 101 Part 1: Chassis Overview 2017 1 Introductions Rest rooms location. Food and Drink. Cell phones. Today presentation available at: http://www.roboplex.org/fll 2 What can be used
Chassis & Attachments 101 Part 1: Chassis Overview 2017 1 Introductions Rest rooms location. Food and Drink. Cell phones. Today presentation available at: http://www.roboplex.org/fll 2 What can be used
Astro-Physics Inc. 400QMD Lubrication/Maintenance Guide
 Astro-Physics Inc. 400QMD Lubrication/Maintenance Guide The following guidelines should be followed to lubricate the three main parts of the 400QMD mount. The QMD stands for Quartz Micro-Drive controller.
Astro-Physics Inc. 400QMD Lubrication/Maintenance Guide The following guidelines should be followed to lubricate the three main parts of the 400QMD mount. The QMD stands for Quartz Micro-Drive controller.
400GTO Lubrication Guide
 400GTO Lubrication Guide Lubrication Guidelines for the following equatorial mounting: 400GTO Servo with GTOCP2 or CP3 Controller For other 400 models please review other postings as they become available.
400GTO Lubrication Guide Lubrication Guidelines for the following equatorial mounting: 400GTO Servo with GTOCP2 or CP3 Controller For other 400 models please review other postings as they become available.
Unit 4: Robot Chassis Construction
 Unit 4: Robot Chassis Construction Unit 4: Teacher s Guide Lesson Overview: Paul s robotic assistant needs to operate in a real environment. The size, scale, and capabilities of the TETRIX materials are
Unit 4: Robot Chassis Construction Unit 4: Teacher s Guide Lesson Overview: Paul s robotic assistant needs to operate in a real environment. The size, scale, and capabilities of the TETRIX materials are
Mechanical Issues. January 4 th, Aaron Sokoloski
 Mechanical Issues January 4 th, 2005 Aaron Sokoloski Agenda The Maslab Workshop Raw Materials Other Materials Fasteners Tools Safety & Maintenance Mechanical issues Motors Techniques Design Principles
Mechanical Issues January 4 th, 2005 Aaron Sokoloski Agenda The Maslab Workshop Raw Materials Other Materials Fasteners Tools Safety & Maintenance Mechanical issues Motors Techniques Design Principles
ROOP LAL Unit-6 Shaper & Planer Mechanical Engineering Department
 Notes: shapers and planers Basic Mechanical Engineering (Part B ) 1 Introduction: Both shapers and planers are machine tools which produce a flat surface. They are capable of machining a horizontal, vertical
Notes: shapers and planers Basic Mechanical Engineering (Part B ) 1 Introduction: Both shapers and planers are machine tools which produce a flat surface. They are capable of machining a horizontal, vertical
In order to do this project you should review the following concepts:
 Catapult In order to do this project you should review the following concepts: Catapult 18 Rope Lego Band Rubber Band Catapult: Arm Catapult: Arm Catapult: Arm Leave the other end of the rubber band loose
Catapult In order to do this project you should review the following concepts: Catapult 18 Rope Lego Band Rubber Band Catapult: Arm Catapult: Arm Catapult: Arm Leave the other end of the rubber band loose
ORTOP Modular Robot v3.0 Arm Assembly
 Base Plate Assembly Parts Needed: Arm Assembly BAG 1 2 Socket Head Cap Screw, 1-1/4" 2 Socket Head Cap Screw, 1/2" 2 Button Head Cap Screw, 3/8" 6 Nuts 1 Gear Hub Spacer 1 Flat Building Plate 1 Single
Base Plate Assembly Parts Needed: Arm Assembly BAG 1 2 Socket Head Cap Screw, 1-1/4" 2 Socket Head Cap Screw, 1/2" 2 Button Head Cap Screw, 3/8" 6 Nuts 1 Gear Hub Spacer 1 Flat Building Plate 1 Single
HOLY ANGEL UNIVERSITY COLLEGE OF INFORMATION AND COMMUNICATIONS TECHNOLOGY ROBOT MODELING AND PROGRAMMING COURSE SYLLABUS
 HOLY ANGEL UNIVERSITY COLLEGE OF INFORMATION AND COMMUNICATIONS TECHNOLOGY ROBOT MODELING AND PROGRAMMING COURSE SYLLABUS Code : 6ROBOTMOD Prerequisite : 6ARTINTEL Credit : 3 s (3 hours LAB) Year Level:
HOLY ANGEL UNIVERSITY COLLEGE OF INFORMATION AND COMMUNICATIONS TECHNOLOGY ROBOT MODELING AND PROGRAMMING COURSE SYLLABUS Code : 6ROBOTMOD Prerequisite : 6ARTINTEL Credit : 3 s (3 hours LAB) Year Level:
Design and Analysis of a Mechanical Bus Seat Recliner
 Design and Analysis of a Mechanical Bus Seat Recliner 1 L.Ramayee, 2 Ch.V.Sushma, 3 P. Ravinder Reddy, 4 P. Surender Reddy 1,2,3,4 Chaitanya Bharathi Institute of Technology, Hyderabad Abstract Seat recliners
Design and Analysis of a Mechanical Bus Seat Recliner 1 L.Ramayee, 2 Ch.V.Sushma, 3 P. Ravinder Reddy, 4 P. Surender Reddy 1,2,3,4 Chaitanya Bharathi Institute of Technology, Hyderabad Abstract Seat recliners
The light sensor, rotation sensor, and motors may all be monitored using the view function on the RCX.
 Review the following material on sensors. Discuss how you might use each of these sensors. When you have completed reading through this material, build a robot of your choosing that has 2 motors (connected
Review the following material on sensors. Discuss how you might use each of these sensors. When you have completed reading through this material, build a robot of your choosing that has 2 motors (connected
Snow Problem Prototype Concepts for DESTINATION: DEEP SPACE
 ROBOT IN 3 DAYS: SNOW PROBLEM 1 Snow Problem Prototype Concepts for DESTINATION: DEEP SPACE Abraham Carter, Nick Riedel Abstract This white paper summarizes our prototypes for DESTINATION: DEEP SPACE,
ROBOT IN 3 DAYS: SNOW PROBLEM 1 Snow Problem Prototype Concepts for DESTINATION: DEEP SPACE Abraham Carter, Nick Riedel Abstract This white paper summarizes our prototypes for DESTINATION: DEEP SPACE,
#2010 #1795. Frame Rack Dyna Mo Clamps Two pair of jaws with 12 draw bar. Grip surface 9-¼ wide. #1929 #1910
 Mity Bite Clamp Use for one or two-directional pulling. Good for confined areas. Grip 2 wide. Multi Angle Clamp Pulls from any direction with a 180 arc. Makes two-way pulling faster and easier. Bolt stoppers
Mity Bite Clamp Use for one or two-directional pulling. Good for confined areas. Grip 2 wide. Multi Angle Clamp Pulls from any direction with a 180 arc. Makes two-way pulling faster and easier. Bolt stoppers
THE IMPORTANCE OF PLANNING AND DRAWING IN DESIGN
 PROGRAM OF STUDY ENGR.ROB Standard 1 Essential UNDERSTAND THE IMPORTANCE OF PLANNING AND DRAWING IN DESIGN The student will understand and implement the use of hand sketches and computer-aided drawing
PROGRAM OF STUDY ENGR.ROB Standard 1 Essential UNDERSTAND THE IMPORTANCE OF PLANNING AND DRAWING IN DESIGN The student will understand and implement the use of hand sketches and computer-aided drawing
TRAINING BULLETIN FORCIBLE ENTRY 1 March 15, 1997 FORCIBLE ENTRY TABLE OF CONTENTS. 1. Introduction. 2. Doors-Inward Opening. 3. Doors-Outward Opening
 TRAINING BULLETIN 1 March 15, 1997 TABLE OF CONTENTS 1. Introduction 2. Doors-Inward Opening 3. Doors-Outward Opening 4. Through The Lock Method 5. Padlocks 6. American Lock Series 2000 7. Bars And Sliding
TRAINING BULLETIN 1 March 15, 1997 TABLE OF CONTENTS 1. Introduction 2. Doors-Inward Opening 3. Doors-Outward Opening 4. Through The Lock Method 5. Padlocks 6. American Lock Series 2000 7. Bars And Sliding
DESIGN AND FABRICATION OF BOX TRANSPORT MECHANISM
 DESIGN AND FABRICATION OF BOX TRANSPORT MECHANISM Siva Krishna Y 1 and Moulali Sk 2 1 Assistant professor, Mechanical Engineering Department, Sree Venkateswara College of Engineering, Nellore, A.P, India.
DESIGN AND FABRICATION OF BOX TRANSPORT MECHANISM Siva Krishna Y 1 and Moulali Sk 2 1 Assistant professor, Mechanical Engineering Department, Sree Venkateswara College of Engineering, Nellore, A.P, India.
Team #3691 FLL Technical Manual. Ashburn Robotics NXTreme (Team#3691)
") FLL 2010-11 Team #3691 http://www.ashburnrobotics.com/ TechManual NXTreme 3691 - FLL 2010-11.doc Body Forward Page 1 of 44 TechManual NXTreme 3691 - FLL 2010-11.doc Body Forward Page 2 of 44 Ashburn Robotics
FLL 2010-11 Team #3691 http://www.ashburnrobotics.com/ TechManual NXTreme 3691 - FLL 2010-11.doc Body Forward Page 1 of 44 TechManual NXTreme 3691 - FLL 2010-11.doc Body Forward Page 2 of 44 Ashburn Robotics
Robot Design.
 Robot Design Michael Hartwig kcfllref@gmail.com Agenda 2016 KC Region robots Design Elements and Process Robot Design Attachment Design Missions Demonstration Resources Questions 9/9/2017 2017 KC FLL Coaches
Robot Design Michael Hartwig kcfllref@gmail.com Agenda 2016 KC Region robots Design Elements and Process Robot Design Attachment Design Missions Demonstration Resources Questions 9/9/2017 2017 KC FLL Coaches
Chapter 1. Robots and Programs
 Chapter 1 Robots and Programs 1 2 Chapter 1 Robots and Programs Introduction Without a program, a robot is just an assembly of electronic and mechanical components. This book shows you how to give it a
Chapter 1 Robots and Programs 1 2 Chapter 1 Robots and Programs Introduction Without a program, a robot is just an assembly of electronic and mechanical components. This book shows you how to give it a
Technical analysis and diagramming exercises
 Technical analysis and diagramming exercises 1 st year of the second cycle Name: Corrected version June 2010 By a team made up of: Madame Isabelle Lafrance, pedagogical counsellor at the commission scolaire
Technical analysis and diagramming exercises 1 st year of the second cycle Name: Corrected version June 2010 By a team made up of: Madame Isabelle Lafrance, pedagogical counsellor at the commission scolaire
introduction what do I need to use this book? playing without a computer the EV3 software whom is this book for?
 The idea for this book was born in 2012 during a sandstorm in Saudi Arabia. I was locked in my hotel room waiting for the weather to improve and listening to Paul Dukas s symphonic poem The Sorcerer s
The idea for this book was born in 2012 during a sandstorm in Saudi Arabia. I was locked in my hotel room waiting for the weather to improve and listening to Paul Dukas s symphonic poem The Sorcerer s
RC4WD (R2D) R2 Disconnect Transmission Sideway Servo Mount Installation
 R2 Disconnect Transmission Sideway Servo Mount Installation") RC4WD (R2D) R2 Disconnect Transmission Sideway Servo Mount Installation In this manual you will find out how to install the R2D Sideway servo mount. The disconnect tranny is used to help in competition
RC4WD (R2D) R2 Disconnect Transmission Sideway Servo Mount Installation In this manual you will find out how to install the R2D Sideway servo mount. The disconnect tranny is used to help in competition
IMPORTANT: Chuck guard MUST be installed before drill chuck!
 IMPORTANT: Chuck guard MUST be installed before drill chuck! Model G7945/G7946 ***IMPORTANT UPDATE*** For Machines Mfg. Since December, 2012 and Owner's Manual Revised August, 2009 The following changes
IMPORTANT: Chuck guard MUST be installed before drill chuck! Model G7945/G7946 ***IMPORTANT UPDATE*** For Machines Mfg. Since December, 2012 and Owner's Manual Revised August, 2009 The following changes
Model No: TC10. Parts Information: Tyre Changer - Automatic
 Page 1 of 11 1 TC10.01 BODY 2 TC10.02 COLUMN 3 TC10.03 HORIZONTAL ARM ASS'Y 4 TC10.04 WASHER 5 TC10.05 RUBBER FOOT 6 TC10.06 COVER 7 TC10.07 SCREW M14x42 8 TC10.08 PRESS COVER 9 TC10.09 STOP-UP 10 TC10.10
Page 1 of 11 1 TC10.01 BODY 2 TC10.02 COLUMN 3 TC10.03 HORIZONTAL ARM ASS'Y 4 TC10.04 WASHER 5 TC10.05 RUBBER FOOT 6 TC10.06 COVER 7 TC10.07 SCREW M14x42 8 TC10.08 PRESS COVER 9 TC10.09 STOP-UP 10 TC10.10
Learning. Autodesk Inventor 2019 SDC. Modeling, Assembly and Analysis. Randy H. Shih. Better Textbooks. Lower Prices.
 Learning Autodesk Inventor 2019 Modeling, Assembly and Analysis Randy H. Shih SDC PUBLICATIONS Better Textbooks. Lower Prices. www.sdcpublications.com Powered by TCPDF (www.tcpdf.org) Visit the following
Learning Autodesk Inventor 2019 Modeling, Assembly and Analysis Randy H. Shih SDC PUBLICATIONS Better Textbooks. Lower Prices. www.sdcpublications.com Powered by TCPDF (www.tcpdf.org) Visit the following
CATALOG OF REPLACEMENT PARTS
 The Choice of Experience CATALOG OF REPLACEMENT PARTS MODELS 909A 919A 909E 919E 909M 919M SLICERS EFFECTIVE MARCH 2009 - 2 - Table of Contents 5 ELECTRICAL COMPONENTS (909A & 919A) 7 ELECTRICAL COMPONENTS
The Choice of Experience CATALOG OF REPLACEMENT PARTS MODELS 909A 919A 909E 919E 909M 919M SLICERS EFFECTIVE MARCH 2009 - 2 - Table of Contents 5 ELECTRICAL COMPONENTS (909A & 919A) 7 ELECTRICAL COMPONENTS
Reversing Gear. Shay Reversing Gear
 Shay Nelson Riedel Nelson@NelsonsLocomotive.com Initial: 9/23/03 Last Revised: 06/05/2004 The reversing gear is another one of those pieces I've been putting off. The reason for the postponement was that
Shay Nelson Riedel Nelson@NelsonsLocomotive.com Initial: 9/23/03 Last Revised: 06/05/2004 The reversing gear is another one of those pieces I've been putting off. The reason for the postponement was that
SECTION 9: PARTS G7945/G7946
 SECTION 9: PARTS G7945/G7946 Main Parts 22 53 25 26 31 139 32 32-1 60 38 59 38-1 119 35 37 31 38-3 124 125 45A-2 45A-4 45A-1 31 60 45A-3V2 120 121 62 28 28-1 28 27 34 50 51 39 41 126 137 36 46 40 63 33
SECTION 9: PARTS G7945/G7946 Main Parts 22 53 25 26 31 139 32 32-1 60 38 59 38-1 119 35 37 31 38-3 124 125 45A-2 45A-4 45A-1 31 60 45A-3V2 120 121 62 28 28-1 28 27 34 50 51 39 41 126 137 36 46 40 63 33
Robo-Sloth: A Rope-Climbing Robot
 Robo-Sloth: A Rope-Climbing Robot Sandeep Urankar, Pranjal Jain, Anurag Singh, Anupam Saxena and Bhaskar Dasgupta Department of Mechanical Engineering Indian Institute of Technology Kanpur 208016 Abstract
Robo-Sloth: A Rope-Climbing Robot Sandeep Urankar, Pranjal Jain, Anurag Singh, Anupam Saxena and Bhaskar Dasgupta Department of Mechanical Engineering Indian Institute of Technology Kanpur 208016 Abstract
SERVICE PARTS LIST MOTOR ARM/LOWER GUARD ASSEMBLIES SPECIFY CATALOG NO. AND SERIAL NO. WHEN ORDERING PARTS M18 FUEL 7.25" MITER SAW
 0 Component Parts (Small #) Are Included When Ordering The Assembly (Large #). 3 4 67 5 49 628 MOTOR ARM/LOWER GUARD ASSEMBLIES SPECIFY AND NO. WHEN ORDERING PARTS 4 5 3 8 7 50 49 Page Page 2 Page 3 Page
0 Component Parts (Small #) Are Included When Ordering The Assembly (Large #). 3 4 67 5 49 628 MOTOR ARM/LOWER GUARD ASSEMBLIES SPECIFY AND NO. WHEN ORDERING PARTS 4 5 3 8 7 50 49 Page Page 2 Page 3 Page
Midwest RDH Handpiece Repair Procedure
 Midwest RDH Handpiece Repair Procedure The Midwest RDH handpiece is fairly common and is used by hygienists to clean teeth. The most common problems for this handpiece include a bad prophy head or a dirty
Midwest RDH Handpiece Repair Procedure The Midwest RDH handpiece is fairly common and is used by hygienists to clean teeth. The most common problems for this handpiece include a bad prophy head or a dirty
Built-in soft-start feature. Up-Slope and Down-Slope. Power-Up safe start feature. Motor will only start if pulse of 1.5ms is detected.
 Thank You for purchasing our TRI-Mode programmable DC Motor Controller. Our DC Motor Controller is the most flexible controller you will find. It is user-programmable and covers most applications. This
Thank You for purchasing our TRI-Mode programmable DC Motor Controller. Our DC Motor Controller is the most flexible controller you will find. It is user-programmable and covers most applications. This
BY ALIEN TECHNOLOGIES CORP
 BY ALIEN TECHNOLOGIES CORP Assembly Instructions TopLift Pros YOU MAY ALSO REVIEW OUR ASSEMBLY VIDEO, PLAY AND PAUSE AT YOUR CONVENIENCE. JUST VISIT US AT WWW.TOPLIFTPROS.COM AND GO TO Customer Support
BY ALIEN TECHNOLOGIES CORP Assembly Instructions TopLift Pros YOU MAY ALSO REVIEW OUR ASSEMBLY VIDEO, PLAY AND PAUSE AT YOUR CONVENIENCE. JUST VISIT US AT WWW.TOPLIFTPROS.COM AND GO TO Customer Support
CougarTech Team CTMech-Mechanical Handbook. Revision V Page 1 of 20. Mechanical Handbook
 Revision V160710 Page 1 of 20 Mechanical Handbook Revision V160710 Page 2 of 20 Table of Contents 1 INTRODUCTION... 5 1.1 Purpose... 5 1.2 Scope... 5 1.3 Audience... 5 1.4 References... 5 1.5 Definitions...
Revision V160710 Page 1 of 20 Mechanical Handbook Revision V160710 Page 2 of 20 Table of Contents 1 INTRODUCTION... 5 1.1 Purpose... 5 1.2 Scope... 5 1.3 Audience... 5 1.4 References... 5 1.5 Definitions...
Pre-Day Questionnaire
 LEGO Mindstorms Pre-Day Questionnaire Your Age? Please select your age from the options below: a) 11 b) 12 c) 13 d) 14 e) 15 or Older 0 0 0 0 0 11 12 13 14 15&or&Older Good at Problem Solving? Do you think
LEGO Mindstorms Pre-Day Questionnaire Your Age? Please select your age from the options below: a) 11 b) 12 c) 13 d) 14 e) 15 or Older 0 0 0 0 0 11 12 13 14 15&or&Older Good at Problem Solving? Do you think
HR24TS Rotary Rake. Serial Numbers less than Illustrated Parts Breakdown. Curtain & Guards, Front
 HRTS Rotary Rake Serial Numbers less than 00 Illustrated Parts Breakdown Page Page Page Page Page Page Page Page Page Page Page Page Tongue Front Frame Front Axle Curtain & Guards, Front Front Pivot Bridge
HRTS Rotary Rake Serial Numbers less than 00 Illustrated Parts Breakdown Page Page Page Page Page Page Page Page Page Page Page Page Tongue Front Frame Front Axle Curtain & Guards, Front Front Pivot Bridge
Printrbot Simple (Model 1403) Rev F Printrboard
 Rev F Printrboard") Printrbot Simple (Model 1403) Rev F Printrboard Printrbot Simple is currently shipping with the Rev F Printrboard. Check which rev Printrboard your Simple kit includes and use the corresponding instructions.
Printrbot Simple (Model 1403) Rev F Printrboard Printrbot Simple is currently shipping with the Rev F Printrboard. Check which rev Printrboard your Simple kit includes and use the corresponding instructions.
Inspiring Creative Fun Ysbrydoledig Creadigol Hwyl. LEGO Bowling Workbook
 Inspiring Creative Fun Ysbrydoledig Creadigol Hwyl LEGO Bowling Workbook Robots are devices, sometimes they run basic instructions via electric circuitry or on most occasions they can be programmable.
Inspiring Creative Fun Ysbrydoledig Creadigol Hwyl LEGO Bowling Workbook Robots are devices, sometimes they run basic instructions via electric circuitry or on most occasions they can be programmable.
A NOVEL PASSIVE ROBOTIC TOOL INTERFACE
 A NOVEL PASSIVE ROBOTIC TOOL INTERFACE Paul Roberts (1) (1) MDA, 9445 Airport Road, Brampton, ON, Canada, L6S 4J3, paul.roberts@mdacorporation.com ABSTRACT The increased capability of space robotics has
A NOVEL PASSIVE ROBOTIC TOOL INTERFACE Paul Roberts (1) (1) MDA, 9445 Airport Road, Brampton, ON, Canada, L6S 4J3, paul.roberts@mdacorporation.com ABSTRACT The increased capability of space robotics has
INTRODUCTION TO ROBOTICS
 INTRODUCTION TO ROBOTICS ROBOTICS CLUB SCIENCE AND TECHNOLOGY COUNCIL, IIT-KANPUR AUGUST 6 TH, 2016 OUTLINE What is a robot? Classifications of Robots What goes behind making a robot? Mechanical Electrical
INTRODUCTION TO ROBOTICS ROBOTICS CLUB SCIENCE AND TECHNOLOGY COUNCIL, IIT-KANPUR AUGUST 6 TH, 2016 OUTLINE What is a robot? Classifications of Robots What goes behind making a robot? Mechanical Electrical
Robotics Workshop. for Parents and Teachers. September 27, 2014 Wichita State University College of Engineering. Karen Reynolds
 Robotics Workshop for Parents and Teachers September 27, 2014 Wichita State University College of Engineering Steve Smith Christa McAuliffe Academy ssmith3@usd259.net Karen Reynolds Wichita State University
Robotics Workshop for Parents and Teachers September 27, 2014 Wichita State University College of Engineering Steve Smith Christa McAuliffe Academy ssmith3@usd259.net Karen Reynolds Wichita State University
3DOF Leg Kit Assembly Guide VERSION 1.0
 3DOF Leg Kit Assembly Guide VERSION 1.0 WARRANTY CrustCrawler warrants its products against defects in materials and workmanship for a period of 30 days. If you discover a defect, CrustCrawler will, at
3DOF Leg Kit Assembly Guide VERSION 1.0 WARRANTY CrustCrawler warrants its products against defects in materials and workmanship for a period of 30 days. If you discover a defect, CrustCrawler will, at
PARTS. W1669 & W1670 Parts PARTS. Model W1669/W1670 (For Machines Mfd. Since 04/18) 66V A A A 28A
 66V A A A 28A") W1669 & W1670 Parts 23 66V2 22 21 25 26 53A 62 63 89 64 9 65 24 20 15 16A 54 93 10 16A-1 81 77 94 53 79 102 103 28 36 8 30 19 31 32 32-1 109 28A 28 27 34 33 56 49 76 76 19-3 19-1 19-2 38-1 89 35 60 59
W1669 & W1670 Parts 23 66V2 22 21 25 26 53A 62 63 89 64 9 65 24 20 15 16A 54 93 10 16A-1 81 77 94 53 79 102 103 28 36 8 30 19 31 32 32-1 109 28A 28 27 34 33 56 49 76 76 19-3 19-1 19-2 38-1 89 35 60 59
Laboratory Mini-Projects Summary
 ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
SERVICE PARTS LIST. M18 FUEL SAWZALL Reciprocating Saw F56A BULLETIN NO CATALOG NO
 47(5x) 46 45 00 44 0 59 43 42 84 51 57 46 47 48 59 83 64 77 48 47(2x) 49(2x) 40 58 See service note on page 5 41 82 51 40 41 42 43 44 45 87 52 27 28 34 57 29 (6x) 60 28 EXAMPLE: Component Parts (Small
47(5x) 46 45 00 44 0 59 43 42 84 51 57 46 47 48 59 83 64 77 48 47(2x) 49(2x) 40 58 See service note on page 5 41 82 51 40 41 42 43 44 45 87 52 27 28 34 57 29 (6x) 60 28 EXAMPLE: Component Parts (Small
Team Description Paper
 Team Description Paper Sebastián Bejos, Fernanda Beltrán, Ivan Feliciano, Giovanni Guerrero, Moroni Silverio 1 Abstract We describe the design of the hardware and software components, as well as the algorithms
Team Description Paper Sebastián Bejos, Fernanda Beltrán, Ivan Feliciano, Giovanni Guerrero, Moroni Silverio 1 Abstract We describe the design of the hardware and software components, as well as the algorithms
Pre-Activity Quiz. building a robot to fight another robot by trying to push it out of a ring? in the competition? the way when racing?
 Sumobot - RaceCar Challenge Pre-Activity Quiz 1. What must you keep in mind when building a robot to fight another robot by trying to push it out of a ring? 2. How can you use gears to your advantage in
Sumobot - RaceCar Challenge Pre-Activity Quiz 1. What must you keep in mind when building a robot to fight another robot by trying to push it out of a ring? 2. How can you use gears to your advantage in
C70 Window Roller Repair Taken from: Heres the problem:
 C70 Window Roller Repair Taken from: http://www.volvospeed.com/vs_forum/topic/115086-how-to-c70-window-rollers-permanent-fix/ Heres the problem: This happened to two separate window assemblys on my c70
C70 Window Roller Repair Taken from: http://www.volvospeed.com/vs_forum/topic/115086-how-to-c70-window-rollers-permanent-fix/ Heres the problem: This happened to two separate window assemblys on my c70
SRV02-Series. Rotary Servo Plant. User Manual
 SRV02-Series Rotary Servo Plant User Manual SRV02-(E;EHR)(T) Rotary Servo Plant User Manual 1. Description The plant consists of a DC motor in a solid aluminum frame. The motor is equipped with a gearbox.
SRV02-Series Rotary Servo Plant User Manual SRV02-(E;EHR)(T) Rotary Servo Plant User Manual 1. Description The plant consists of a DC motor in a solid aluminum frame. The motor is equipped with a gearbox.
Coolant Tank Screen Leg Idle End Lockwasher 64 B-015B Leg Drive End Machine Screw 1/4-20 x 3/4 Round Head
 Always give model number, serial number and part number when ordering repair parts. BED, COOLANT & DASH POT PARTS LIST (Cont'd.) REF NO. PART NUMBER DESCRIPTION 19 B-077 Vise Slide Block 20 B-045 Vise
Always give model number, serial number and part number when ordering repair parts. BED, COOLANT & DASH POT PARTS LIST (Cont'd.) REF NO. PART NUMBER DESCRIPTION 19 B-077 Vise Slide Block 20 B-045 Vise
GEARS-IDS Invention and Design System Educational Objectives and Standards
 GEARS-IDS Invention and Design System Educational Objectives and Standards The GEARS-IDS Invention and Design System is a customizable science, math and engineering, education tool. This product engages
GEARS-IDS Invention and Design System Educational Objectives and Standards The GEARS-IDS Invention and Design System is a customizable science, math and engineering, education tool. This product engages
STRATA STRENGTH TRAINING SYSTEM INSTRUCTION MANUAL
 STRATA STRENGTH TRAINING SYSTEM INSTRUCTION MANUAL QUESTION? As a quality home gym supplier we are committed to your complete satisfaction. If you have questions, or find missing or damaged parts, we will
STRATA STRENGTH TRAINING SYSTEM INSTRUCTION MANUAL QUESTION? As a quality home gym supplier we are committed to your complete satisfaction. If you have questions, or find missing or damaged parts, we will
Project 8.1b Model An Arbor Press
 Page 1 of 8 Project 8.1b Model An Arbor Press Introduction Have you ever done a skateboard trick or strapped on a pair of in-line skates? What is used between the wheels and axles to allow the wheels to
Page 1 of 8 Project 8.1b Model An Arbor Press Introduction Have you ever done a skateboard trick or strapped on a pair of in-line skates? What is used between the wheels and axles to allow the wheels to
Hi everyone. educational environment based on team work that nurtures creativity and innovation preparing them for a world of increasing
 Hi everyone I would like to introduce myself and the Robotics program to all new and existing families. I teach Robotics to all of your children for an hour every fortnight. Robotics is a relatively new
Hi everyone I would like to introduce myself and the Robotics program to all new and existing families. I teach Robotics to all of your children for an hour every fortnight. Robotics is a relatively new
Medical Robotics Applications & Design Considerations (Part 1) Dr. James Smith
 Dr. James Smith") Medical Robotics Applications & Design Considerations (Part 1) Dr. James Smith A Short History of Robotics Abu Al-Jazari (1136-1206) Arabic scholar during the Islamic Golden Age. Invented the crank-shaft
Medical Robotics Applications & Design Considerations (Part 1) Dr. James Smith A Short History of Robotics Abu Al-Jazari (1136-1206) Arabic scholar during the Islamic Golden Age. Invented the crank-shaft
Table of Contents. B. Base Tool Changer...2 MC-6 Manual Tool Changer...2
 Table of Contents B. Base Tool Changer...2 MC-6 Manual Tool Changer...2 1. Product Overview... 2 1.1 Master Plate Assembly... 2 1.2 Tool Plate Assembly... 3 1.3 Optional Modules... 3 2. Installation...
Table of Contents B. Base Tool Changer...2 MC-6 Manual Tool Changer...2 1. Product Overview... 2 1.1 Master Plate Assembly... 2 1.2 Tool Plate Assembly... 3 1.3 Optional Modules... 3 2. Installation...
RC4WD Diablo V2 Instruction Manual
 Version 1.1 RC4WD Diablo V2 Instruction Manual Thank you for your purchase. Welcome to the RC4WD family. This kit is a combination of many specially engineered and manufactured parts. Enjoy your build.
Version 1.1 RC4WD Diablo V2 Instruction Manual Thank you for your purchase. Welcome to the RC4WD family. This kit is a combination of many specially engineered and manufactured parts. Enjoy your build.
Familiarization with the Servo Robot System
 Exercise 1 Familiarization with the Servo Robot System EXERCISE OBJECTIVE In this exercise, you will be introduced to the Lab-Volt Servo Robot System. In the Procedure section, you will install and connect
Exercise 1 Familiarization with the Servo Robot System EXERCISE OBJECTIVE In this exercise, you will be introduced to the Lab-Volt Servo Robot System. In the Procedure section, you will install and connect
SERVICE MANUAL AND PARTSLIST
 SERVICE MANUAL AND PARTSLIST Next 20 CONTENTS WHAT TO DO WHEN... 1~3 SERVICE ACCESS FACE COVER... 4 TOP COVER... 4 BASE COVER... 5 REAR COVER... 6 FRONT COVER... 7 MECHANICAL ADJUSTMENT NEEDLE THREAD TENSION...
SERVICE MANUAL AND PARTSLIST Next 20 CONTENTS WHAT TO DO WHEN... 1~3 SERVICE ACCESS FACE COVER... 4 TOP COVER... 4 BASE COVER... 5 REAR COVER... 6 FRONT COVER... 7 MECHANICAL ADJUSTMENT NEEDLE THREAD TENSION...
Beyond Brainstorming What to do when your ideas fizzle? for FLL and FIRST. Kung-Khoon (K.K.) Quah
 Quah") Beyond Brainstorming What to do when your ideas fizzle? for FLL and FIRST By Kung-Khoon (K.K.) Quah Background I have been a coach for 3 years in the FIRST LEGO League tournaments and one of the weakest
Beyond Brainstorming What to do when your ideas fizzle? for FLL and FIRST By Kung-Khoon (K.K.) Quah Background I have been a coach for 3 years in the FIRST LEGO League tournaments and one of the weakest
Introduction.
 Teaching Deliberative Navigation Using the LEGO RCX and Standard LEGO Components Gary R. Mayer *, Jerry B. Weinberg, Xudong Yu Department of Computer Science, School of Engineering Southern Illinois University
Teaching Deliberative Navigation Using the LEGO RCX and Standard LEGO Components Gary R. Mayer *, Jerry B. Weinberg, Xudong Yu Department of Computer Science, School of Engineering Southern Illinois University
OPTICS IN MOTION. Introduction: Competing Technologies: 1 of 6 3/18/2012 6:27 PM.
 1 of 6 3/18/2012 6:27 PM OPTICS IN MOTION STANDARD AND CUSTOM FAST STEERING MIRRORS Home Products Contact Tutorial Navigate Our Site 1) Laser Beam Stabilization to design and build a custom 3.5 x 5 inch,
1 of 6 3/18/2012 6:27 PM OPTICS IN MOTION STANDARD AND CUSTOM FAST STEERING MIRRORS Home Products Contact Tutorial Navigate Our Site 1) Laser Beam Stabilization to design and build a custom 3.5 x 5 inch,
Tools: Sharpie, Square, Vise, Hack saw, Ruler, Punch, Hammer, File. 2. Cut the stock Place stock in vise and cut with hack saw
 Purpose: MAKE CATAPULT ARM Step 1 Tools: Sharpie, Square, Vise, Hack saw, Ruler, Punch, Hammer, File Materials: Flat aluminum ½ inch stock (see picture below) Gloves required 1. Pick up the aluminum ½
Purpose: MAKE CATAPULT ARM Step 1 Tools: Sharpie, Square, Vise, Hack saw, Ruler, Punch, Hammer, File Materials: Flat aluminum ½ inch stock (see picture below) Gloves required 1. Pick up the aluminum ½
Teach Yourself UG NX Step-by-Step
 Teach Yourself UG NX Step-by-Step By Hui Zhang Ph.D., P.Eng. www.geocities.com/zhanghui1998 Table of Contents Chapter 1 Introduction... 1 1.1 UG NX User Interface... 1 1.2 Solid Modeling Fundamentals...
Teach Yourself UG NX Step-by-Step By Hui Zhang Ph.D., P.Eng. www.geocities.com/zhanghui1998 Table of Contents Chapter 1 Introduction... 1 1.1 UG NX User Interface... 1 1.2 Solid Modeling Fundamentals...
UNIT 4: (iii) Illustrate the general kinematic system of drilling machine and explain its working principle
 Illustrate the general kinematic system of drilling machine and explain its working principle") UNIT 4: Drilling machines: Classification, constructional features, drilling & related operations, types of drill & drill bit nomenclature, drill materials. Instructional Objectives At the end of this
UNIT 4: Drilling machines: Classification, constructional features, drilling & related operations, types of drill & drill bit nomenclature, drill materials. Instructional Objectives At the end of this
Medical Robotics Applications & Design Considerations (Part 1) Dr. James Smith
 Dr. James Smith") Medical Robotics Applications & Design Considerations (Part 1) Dr. James Smith A Short History of Robotics Abu Al-Jazari (1136-1206) Arabic scholar during the Islamic Golden Age. Invented the crank-shaft
Medical Robotics Applications & Design Considerations (Part 1) Dr. James Smith A Short History of Robotics Abu Al-Jazari (1136-1206) Arabic scholar during the Islamic Golden Age. Invented the crank-shaft
Replacing the Reciprocator on the SWF Compact Series Machine (601C and 1201C)
") Follow the instructions below to replace the reciprocator in the SWF Compact series machines. The tools required can be found in the tool kit that came with the machine. Preparation 1. First, place the
Follow the instructions below to replace the reciprocator in the SWF Compact series machines. The tools required can be found in the tool kit that came with the machine. Preparation 1. First, place the
12. Mechanical Drawings & Parts Breakdown List
 12. Mechanical Drawings & Parts Breakdown List Note: When ordering parts, please be prepared with, 1. Machine model & serial number. 2. Item number. 3. Part number and description. 4. Year of Production.
12. Mechanical Drawings & Parts Breakdown List Note: When ordering parts, please be prepared with, 1. Machine model & serial number. 2. Item number. 3. Part number and description. 4. Year of Production.
Reed pipe tools and vises
 Reed pipe tools and vises Reed have been producing fine tools for professional craftsmen since 1896. Reed engineers have developed many of the most innovative and effective tools in the industry - such
Reed pipe tools and vises Reed have been producing fine tools for professional craftsmen since 1896. Reed engineers have developed many of the most innovative and effective tools in the industry - such
Step 1: Gather your parts!
 Step 1: Gather your parts! Show All Items The #mearm was designed with economy in mind. It is understood that laser cutters aren't the most common tools but there are more of them out there now than
Step 1: Gather your parts! Show All Items The #mearm was designed with economy in mind. It is understood that laser cutters aren't the most common tools but there are more of them out there now than
REPAIR INSTRUCTIONS. Cat. No Cat. No MILWAUKEE ELECTRIC TOOL CORPORATION. SDS Max Demolition Hammer. SDS Max Rotary Hammer
 Cat. No. 9-0 SDS Max Demolition Hammer Cat. No. -0 SDS Max Rotary Hammer MILWAUKEE ELECTRIC TOOL CORPORATION W. LISBON ROAD BROOKFIELD, WISCONSIN 00-0 8-9-0 d 000 8-9-0 d Special Tools Require Forcing
Cat. No. 9-0 SDS Max Demolition Hammer Cat. No. -0 SDS Max Rotary Hammer MILWAUKEE ELECTRIC TOOL CORPORATION W. LISBON ROAD BROOKFIELD, WISCONSIN 00-0 8-9-0 d 000 8-9-0 d Special Tools Require Forcing
Brother Industries, Ltd. Nagoya, Japan
 4. 2001. This service manual has been compiled for explaining repair procedures of the MODEL XL-6562, XL6452, XR- 46. This was produced based on up-to-date product specifications at the time of issue,
4. 2001. This service manual has been compiled for explaining repair procedures of the MODEL XL-6562, XL6452, XR- 46. This was produced based on up-to-date product specifications at the time of issue,
Lab book. Exploring Robotics (CORC3303)
") Lab book Exploring Robotics (CORC3303) Dept of Computer and Information Science Brooklyn College of the City University of New York updated: Fall 2011 / Professor Elizabeth Sklar UNIT A Lab, part 1 : Robot
Lab book Exploring Robotics (CORC3303) Dept of Computer and Information Science Brooklyn College of the City University of New York updated: Fall 2011 / Professor Elizabeth Sklar UNIT A Lab, part 1 : Robot