Tool Chains for Simulation and Experimental Validation of Orbital Robotic Technologies
|
|
|
- Meghan Boone
- 5 years ago
- Views:
Transcription



1 DLR.de Chart 1 > The Next Generation of Space Robotic Servicing Technologies > Ch. Borst Exploration of Orbital Robotic Technologies > Tool Chains for Simulation and Experimental Validation of Orbital Robotic Technologies Roberto Lampariello, Christoph Borst Institute of Robotics and Mechatronics German Areospace Center (DLR)

2 DLR.de Chart 2 Objectives, Simulators What is the story about all those simulators? Is it really a validation/verification? For what do we need them if it s not verification?
3 DLR.de Chart 3 > The Next Generation of Space Robotic Servicing Technologies > Ch. Borst Exploration of Orbital Robotic Technologies > Are space-robots the next big thing? Christoph Borst Institute of Robotics and Mechatronics German Areospace Center (DLR)





4 DLR.de Chart 4 What makes the robot a success story on earth? A robot is a programmable, multipurpose device. The same robot can be used for different tasks. The same application is used many times in the same company / different companies Adding a new application to a robot is cost intensive

. We can use robots instead of special mission specific mechanisms")

5 DLR.de Chart 5 What is the expectation on robots in space? Saving costs? We don t build many space robots We can t use the technology developed for the last mission We don t have the same application many times (not yet). We can use robots instead of special mission specific mechanisms Rendering: Airbus Can we develop standard operations? We need procedures to verify the operations. European Proximity Operations Simulator
6 DLR.de Chart 6 Is space robotics driving innovation in robotics? No! The mechatronics used is bulky and built with old (but tested) components. Developments for a mission are time consuming and document work is boring One mission every 10 years? Strict requirement driven development is contrary to the nature of the robot which heads for generality
7 DLR.de Chart 7 Is space robotics driving innovation in robotics? No! The mechatronics used is bulky and built with old (but tested) components. Developments for a mission are time consuming and document work is boring Yes! Teach in of coordinate frames is not an option Satellite based operation is mobile manipulation at its best One mission every 10 years? Strict requirement driven development is contrary to the nature of the robot which heads for generality While the next step on assembly on ground is to add static forces to assembly, here dynamics is to be solved




8 DLR.de Chart 8 Innovation by example The german orbital servicing mission DEOS Approaching Docking & Repair Grasping Deorbiting

9 DLR.de Chart 9 Basic concept for the original mission

10 DLR.de Chart 10 Developing the technology & proof of concept Simulating towards the real mission Idea: Incrementally develop from a pure virtual computer simulation to more realistic systems using always the same core flight controller.
11 DLR.de Chart 11 Developing the technology & proof of concept Simulating towards the real mission
12 DLR.de Chart 12 Developing the technology & proof of concept Simulating towards the real mission

13 DLR.de Chart 13 Developing the technology & proof of concept Simulating towards the real mission

14 DLR.de Chart 14 The virtual simulation frame

15 DLR.de Chart 15 The lightweight robot frame using an existing setup
16 DLR.de Chart 16 The lightweight robot frame using an existing setup
17 DLR.de Chart 17 The lightweight robot frame using an existing setup
18 DLR.de Chart 18 The lightweight robot frame using an existing setup

19 DLR.de Chart 19 The OOS Simulator Frame

20 DLR.de Chart 20 The OOS Simulator Frame
21 DLR.de Chart 21 The OOS Simulator Frame
22 DLR.de Chart 22 This was the simple task: Technologies to handle the robot / satellite Task: Simple Pick & Place Discussion within the consortium if Torque Controlled Robot is needed (cost efficiency) Design to Cost Phase: Evaluation if a target in space can be used No changes for the robot no changes for the mission objectives Mount a structure on a cooperating target to restore the setup!
23 DLR.de Chart 23 This was the simple task: Technologies to handle the robot / satellite Task: Simple Pick & Place Discussion within the consortium if Torque Controlled Robot is needed (cost efficiency) Design to Cost Phase: Evaluation if a target in space can be used No changes for the robot no changes for the mission objectives Mount a structure on a cooperating target to restore the setup!


24 DLR.de Chart 24 This is a game changer: Now it is an assembly task Mounting the gears of an oilpump Rotor Core assembly EC TAPAS Project How to find a robust strategy for safely grasping the satellite with small clearance?

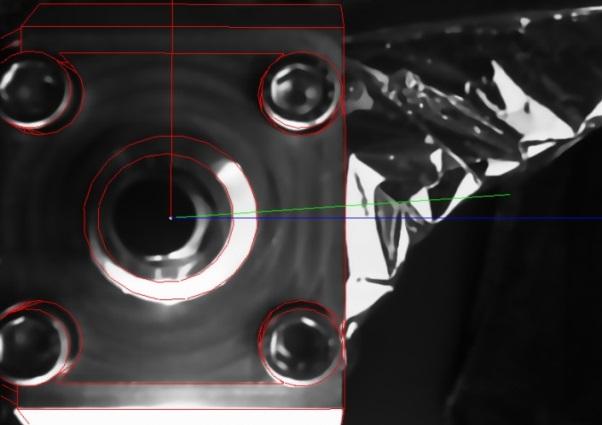
25 DLR.de Chart 25 Visualization of the new task:



 DEOS Arm Camera")

26 DLR.de Chart 26 Analysis of the precision needed to accomplish the task TCP Precision joint precision Image Resolution Frame rate Motion Planner Motion Controller (impedance/ position ) DEOS Arm Camera Kinematic Chain Camera Pose Estimation Pose Estimation Precision



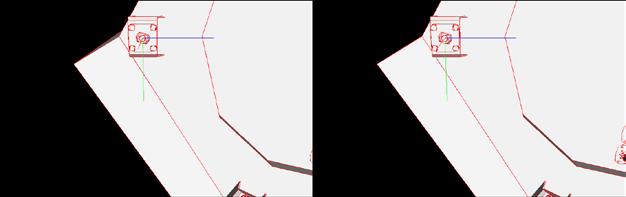
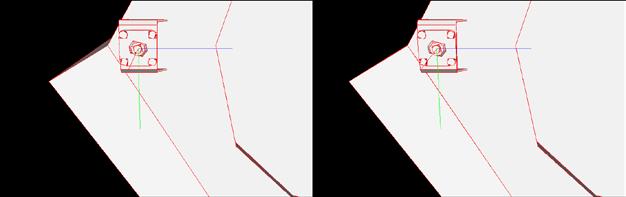
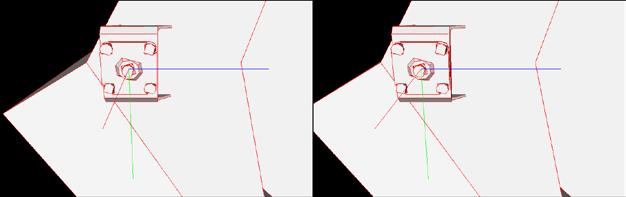
27 DLR.de Chart 27 Pose estimation / tracking precision Ray-Tracing Simulator to analyse best case tracking: movement translation



28 DLR.de Chart 28 Pose estimation / tracking precision Towards a worst case estimation Open Loop Test Setup Robot System Coordinate Frames




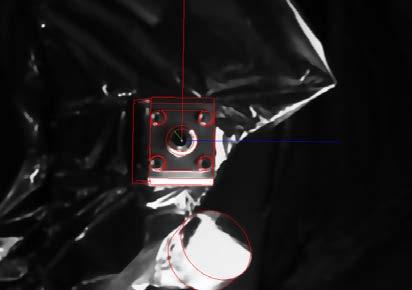
29 DLR.de Chart 29 Test setup on EPOS at DLR Lightning conditions are heavily influencing the tracking precision Here the original DEOS setup is installed Smaller structures & MLI might have heavy influence as well

30 DLR.de Chart 30 A flexible vision testbed




31 DLR.de Chart 31 Results from the testbed


32 DLR.de Chart 32 Grasping the satellite Critical Path Grasping the fixture joining assignment Grasping Strategy - to be verified

33 DLR.de Chart 33 If automation fails can telepresence help?

34 DLR.de Chart 34 If automation fails can telepresence help?

35 DLR.de Chart 35 Define relevant earth analog setups & accept results

36 DLR.de Chart 36 Define relevant earth analog setups & accept results
37 DLR.de Chart 37 Define relevant earth analog setups & accept results



38 DLR.de Chart 38 Conclusion: Think about operations and experiments! The researchers made this possible: Roberto Lampariello Jordi Artigas Gorgio Panin Bernhard Brunner Martin Lingenauber Florian Schmidt Robert Burger Toralf Boge Rainer Krenn

39 DLR.de Chart 39 Thank you for your attention
Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit
 www.dlr.de Chart 1 Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit Steffen Jaekel, R. Lampariello, G. Panin, M. Sagardia, B. Brunner, O. Porges, and E. Kraemer (1) M. Wieser,
www.dlr.de Chart 1 Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit Steffen Jaekel, R. Lampariello, G. Panin, M. Sagardia, B. Brunner, O. Porges, and E. Kraemer (1) M. Wieser,
The DLR On-Orbit Servicing Testbed
 The DLR On-Orbit Servicing Testbed J. Artigas, R. Lampariello, B. Brunner, M. Stelzer, C. Borst, K. Landzettel, G. Hirzinger, A. Albu-Schäffer Robotics and Mechatronics Center, DLR VR-OOS Workshop 2012
The DLR On-Orbit Servicing Testbed J. Artigas, R. Lampariello, B. Brunner, M. Stelzer, C. Borst, K. Landzettel, G. Hirzinger, A. Albu-Schäffer Robotics and Mechatronics Center, DLR VR-OOS Workshop 2012
End-to-End Simulation and Verification of Rendezvous and Docking/Berthing Systems using Robotics
 Session 9 Special Test End-to-End Simulation and Verification of Rendezvous and Docking/Berthing Systems using Robotics Author(s): H. Benninghoff, F. Rems, M. Gnat, R. Faller, R. Krenn, M. Stelzer, B.
Session 9 Special Test End-to-End Simulation and Verification of Rendezvous and Docking/Berthing Systems using Robotics Author(s): H. Benninghoff, F. Rems, M. Gnat, R. Faller, R. Krenn, M. Stelzer, B.
ROKVISS Verification of Advanced Tele-Presence Concepts for Future Space Missions
 ROKVISS Verification of Advanced Tele-Presence Concepts for Future Space Missions ASTRA 2002 Klaus Landzettel, Bernhard Brunner, Alexander Beyer, Erich Krämer, Carsten Preusche, Bernhard-Michael Steinmetz,
ROKVISS Verification of Advanced Tele-Presence Concepts for Future Space Missions ASTRA 2002 Klaus Landzettel, Bernhard Brunner, Alexander Beyer, Erich Krämer, Carsten Preusche, Bernhard-Michael Steinmetz,
A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing
 A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing Robin Wolff German Aerospace Center (DLR), Germany Slide 1 Outline! Motivation!
A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing Robin Wolff German Aerospace Center (DLR), Germany Slide 1 Outline! Motivation!
13/11/2013. German Aerospace Center. Virtual Reality for Planning and Controlling of Robot-based Servicing in Space. German Aerospace Center
 DLR.de Chart 1 DLR.de Chart 4 German Aerospace Center Virtual Reality for Planning and Controlling of Robot-based Servicing in Space Andreas Gerndt German Aerospace Center (DLR) Simulation and Software
DLR.de Chart 1 DLR.de Chart 4 German Aerospace Center Virtual Reality for Planning and Controlling of Robot-based Servicing in Space Andreas Gerndt German Aerospace Center (DLR) Simulation and Software
Robotic System Simulation and Modeling Stefan Jörg Robotic and Mechatronic Center
 Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Integrated Technology Concept for Robotic On-Orbit Servicing Systems
 Integrated Technology Concept for Robotic On-Orbit Servicing Systems Bernd Maediger, Airbus DS GmbH Bremen, Germany Visual-based navigation Manipulation Grasping Non-cooperative target GNC Visual-based
Integrated Technology Concept for Robotic On-Orbit Servicing Systems Bernd Maediger, Airbus DS GmbH Bremen, Germany Visual-based navigation Manipulation Grasping Non-cooperative target GNC Visual-based
More Info at Open Access Database by S. Dutta and T. Schmidt
 More Info at Open Access Database www.ndt.net/?id=17657 New concept for higher Robot position accuracy during thermography measurement to be implemented with the existing prototype automated thermography
More Info at Open Access Database www.ndt.net/?id=17657 New concept for higher Robot position accuracy during thermography measurement to be implemented with the existing prototype automated thermography
Force Feedback in Virtual Assembly Scenarios: A Human Factors Evaluation
 Force Feedback in Virtual Assembly Scenarios: A Human Factors Evaluation Bernhard Weber German Aerospace Center Institute of Robotics and Mechatronics DLR.de Chart 2 Content Motivation Virtual Environment
Force Feedback in Virtual Assembly Scenarios: A Human Factors Evaluation Bernhard Weber German Aerospace Center Institute of Robotics and Mechatronics DLR.de Chart 2 Content Motivation Virtual Environment
Autonomous Cooperative Robots for Space Structure Assembly and Maintenance
 Proceeding of the 7 th International Symposium on Artificial Intelligence, Robotics and Automation in Space: i-sairas 2003, NARA, Japan, May 19-23, 2003 Autonomous Cooperative Robots for Space Structure
Proceeding of the 7 th International Symposium on Artificial Intelligence, Robotics and Automation in Space: i-sairas 2003, NARA, Japan, May 19-23, 2003 Autonomous Cooperative Robots for Space Structure
VR-OOS System Architecture Workshop zu interaktiven VR-Technologien für On-Orbit Servicing
 www.dlr.de Chart 1 > VR-OOS System Architecture > Robin Wolff VR-OOS Workshop 09/10.10.2012 VR-OOS System Architecture Workshop zu interaktiven VR-Technologien für On-Orbit Servicing Robin Wolff DLR, and
www.dlr.de Chart 1 > VR-OOS System Architecture > Robin Wolff VR-OOS Workshop 09/10.10.2012 VR-OOS System Architecture Workshop zu interaktiven VR-Technologien für On-Orbit Servicing Robin Wolff DLR, and
FORCE-FEEDBACK TELEOPERATION OF ON-GROUND ROBOTS FROM THE INTERNATIONAL SPACE STATION IN THE FRAME OF THE KONTUR-2 EXPERIMENT
 J. Artigas (1), C. Riecke (1), B. Weber (1), M. Stelzer (1), R. Balachandran (1), S. Schaetzle (1), R. Bayer (1), M. Steinmetz (1), J. Voegl (1), B. Brunner (1), A. Albu-Schaeffer (1), M. Guk (2),V. Zaborovskyi
J. Artigas (1), C. Riecke (1), B. Weber (1), M. Stelzer (1), R. Balachandran (1), S. Schaetzle (1), R. Bayer (1), M. Steinmetz (1), J. Voegl (1), B. Brunner (1), A. Albu-Schaeffer (1), M. Guk (2),V. Zaborovskyi
The Design of key mechanical functions for a super multi-dof and extendable Space Robotic Arm
 The Design of key mechanical functions for a super multi-dof and extendable Space Robotic Arm Kent Yoshikawa*, Yuichiro Tanaka**, Mitsushige Oda***, Hiroki Nakanishi**** *Tokyo Institute of Technology,
The Design of key mechanical functions for a super multi-dof and extendable Space Robotic Arm Kent Yoshikawa*, Yuichiro Tanaka**, Mitsushige Oda***, Hiroki Nakanishi**** *Tokyo Institute of Technology,
Automation & Robotics (A&R) for Space Applications in the German Space Program
 for Space Applications in the German Space Program") B. Sommer, RD-RR 1 Automation & Robotics (A&R) for Space Applications in the German Space Program ASTRA 2002 ESTEC, November 2002 1 2 Current and future application areas Unmanned exploration of the cold
B. Sommer, RD-RR 1 Automation & Robotics (A&R) for Space Applications in the German Space Program ASTRA 2002 ESTEC, November 2002 1 2 Current and future application areas Unmanned exploration of the cold
Design and Control of the BUAA Four-Fingered Hand
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Multisensory Based Manipulation Architecture
 Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
VALERI - A COLLABORATIVE MOBILE MANIPULATOR FOR AEROSPACE PRODUCTION. CLAWAR 2016, London, UK Fraunhofer IFF Robotersysteme
 VALERI - A COLLABORATIVE MOBILE MANIPULATOR FOR AEROSPACE PRODUCTION CLAWAR 2016, London, UK Fraunhofer IFF Robotersysteme Fraunhofer IFF, Magdeburg 2016 VALERI - A collaborative mobile manipulator for
VALERI - A COLLABORATIVE MOBILE MANIPULATOR FOR AEROSPACE PRODUCTION CLAWAR 2016, London, UK Fraunhofer IFF Robotersysteme Fraunhofer IFF, Magdeburg 2016 VALERI - A collaborative mobile manipulator for
DLR s Optical Communications Program for 2018 and beyond. Dr. Sandro Scalise Institute of Communications and Navigation
 DLR.de Chart 1 DLR s Optical Communications Program for 2018 and beyond Dr. Sandro Scalise Institute of Communications and Navigation DLR.de Chart 3 Relevant Scenarios Unidirectional Links Main application
DLR.de Chart 1 DLR s Optical Communications Program for 2018 and beyond Dr. Sandro Scalise Institute of Communications and Navigation DLR.de Chart 3 Relevant Scenarios Unidirectional Links Main application
REMOTE OPERATION WITH SUPERVISED AUTONOMY (ROSA)
") REMOTE OPERATION WITH SUPERVISED AUTONOMY (ROSA) Erick Dupuis (1), Ross Gillett (2) (1) Canadian Space Agency, 6767 route de l'aéroport, St-Hubert QC, Canada, J3Y 8Y9 E-mail: erick.dupuis@space.gc.ca (2)
REMOTE OPERATION WITH SUPERVISED AUTONOMY (ROSA) Erick Dupuis (1), Ross Gillett (2) (1) Canadian Space Agency, 6767 route de l'aéroport, St-Hubert QC, Canada, J3Y 8Y9 E-mail: erick.dupuis@space.gc.ca (2)
A Unified Ground Control and Programming Methodology for Space Robotics Applications Demonstrations on ETS-VII
 A Unified Ground Control and Programming Methodology for Space Robotics Applications Demonstrations on ETS-VII K. Landzettel, B. Brunner, G. Hirzinger, R. Lampariello, G. Schreiber, B.-M. Steinmetz DLR
A Unified Ground Control and Programming Methodology for Space Robotics Applications Demonstrations on ETS-VII K. Landzettel, B. Brunner, G. Hirzinger, R. Lampariello, G. Schreiber, B.-M. Steinmetz DLR
Application of an optical data link on DLR s BIROS satellite
 www.dlr.de Chart 1 > OSIRIS @ SpaceOps > C. Fuchs > DLR Institute of Communications and Navigation Application of an optical data link on DLR s BIROS satellite Martin Brechtelsbauer, Christopher Schmidt,
www.dlr.de Chart 1 > OSIRIS @ SpaceOps > C. Fuchs > DLR Institute of Communications and Navigation Application of an optical data link on DLR s BIROS satellite Martin Brechtelsbauer, Christopher Schmidt,
PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES
 Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Advanced robotics for Industry 4.0. Michael Valášek, Martin Nečas CTU in Prague, Faculty of Mechanical Engineering
 Advanced robotics for Industry 4.0 Michael Valášek, Martin Nečas CTU in Prague, Faculty of Mechanical Engineering Scope of presentation Directions of current research Examples of advanced robotics Conclusion
Advanced robotics for Industry 4.0 Michael Valášek, Martin Nečas CTU in Prague, Faculty of Mechanical Engineering Scope of presentation Directions of current research Examples of advanced robotics Conclusion
Canadian Activities in Intelligent Robotic Systems - An Overview
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Canadian Activities in Intelligent Robotic
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Canadian Activities in Intelligent Robotic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
C. R. Weisbin, R. Easter, G. Rodriguez January 2001
 on Solar System Bodies --Abstract of a Projected Comparative Performance Evaluation Study-- C. R. Weisbin, R. Easter, G. Rodriguez January 2001 Long Range Vision of Surface Scenarios Technology Now 5 Yrs
on Solar System Bodies --Abstract of a Projected Comparative Performance Evaluation Study-- C. R. Weisbin, R. Easter, G. Rodriguez January 2001 Long Range Vision of Surface Scenarios Technology Now 5 Yrs
Optimal Motion Planning of a Space Robot with Base Disturbance Minimization
 Optimal Motion Planning of a Space Robot with Base Disturbance Minimization Authors: Eric Kaigom, Thomas Jung, Jürgen Rossmann Institute forman MachineInteraction, RWTH Aachen University 1 Virtualize Robotic
Optimal Motion Planning of a Space Robot with Base Disturbance Minimization Authors: Eric Kaigom, Thomas Jung, Jürgen Rossmann Institute forman MachineInteraction, RWTH Aachen University 1 Virtualize Robotic
Figure 2.1 a. Block diagram representation of a system; b. block diagram representation of an interconnection of subsystems
 1 Figure 2.1 a. Block diagram representation of a system; b. block diagram representation of an interconnection of subsystems 2 Table 2.1 Laplace transform table 3 Table 2.2 Laplace transform theorems
1 Figure 2.1 a. Block diagram representation of a system; b. block diagram representation of an interconnection of subsystems 2 Table 2.1 Laplace transform table 3 Table 2.2 Laplace transform theorems
ROBOT DESIGN AND DIGITAL CONTROL
 Revista Mecanisme şi Manipulatoare Vol. 5, Nr. 1, 2006, pp. 57-62 ARoTMM - IFToMM ROBOT DESIGN AND DIGITAL CONTROL Ovidiu ANTONESCU Lecturer dr. ing., University Politehnica of Bucharest, Mechanism and
Revista Mecanisme şi Manipulatoare Vol. 5, Nr. 1, 2006, pp. 57-62 ARoTMM - IFToMM ROBOT DESIGN AND DIGITAL CONTROL Ovidiu ANTONESCU Lecturer dr. ing., University Politehnica of Bucharest, Mechanism and
Franka Emika GmbH. Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient.
 Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a technology accessible only to few. The reasons for this are the
Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a technology accessible only to few. The reasons for this are the
Mission Applications for Space A&R - G.Visentin 1. Automation and Robotics Section (TEC-MMA)
") In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Gianfranco Visentin Head, Automation
In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Gianfranco Visentin Head, Automation
The ESA A&R technology R&D
 The ESA A&R technology R&D Gianfranco Visentin Head, Automation and Robotics Section Directorate of Technical and Quality Management Outline The R&D funding schemes (GSP, TRP, CTP, GSTP, ARTES ) Robotics
The ESA A&R technology R&D Gianfranco Visentin Head, Automation and Robotics Section Directorate of Technical and Quality Management Outline The R&D funding schemes (GSP, TRP, CTP, GSTP, ARTES ) Robotics
RobOps Approaching a Holistic and Unified Interface Service Definition for Future Robotic Spacecraft
 www.dlr.de Chart 1 RobOps Approaching a Holistic and Unified Interface Service Definition for Future Robotic Spacecraft Steffen Jaekel, Bernhard Brunner (1) Christian Laroque, Zoran Pjevic (2) Felix Flentge
www.dlr.de Chart 1 RobOps Approaching a Holistic and Unified Interface Service Definition for Future Robotic Spacecraft Steffen Jaekel, Bernhard Brunner (1) Christian Laroque, Zoran Pjevic (2) Felix Flentge
Towards Autonomous Planetary Exploration Collaborative Multi-Robot Localization and Mapping in GPS-denied Environments
 DLR.de Chart 1 International Technical Symposium on Navigation and Timing (ITSNT) Toulouse, France, 2017 Towards Autonomous Planetary Exploration Collaborative Multi-Robot Localization and Mapping in GPS-denied
DLR.de Chart 1 International Technical Symposium on Navigation and Timing (ITSNT) Toulouse, France, 2017 Towards Autonomous Planetary Exploration Collaborative Multi-Robot Localization and Mapping in GPS-denied
Model Based AOCS Design and Automatic Flight Code Generation: Experience and Future Development
 ADCSS 2016 October 20, 2016 Model Based AOCS Design and Automatic Flight Code Generation: Experience and Future Development SATELLITE SYSTEMS Per Bodin Head of AOCS Department OHB Sweden Outline Company
ADCSS 2016 October 20, 2016 Model Based AOCS Design and Automatic Flight Code Generation: Experience and Future Development SATELLITE SYSTEMS Per Bodin Head of AOCS Department OHB Sweden Outline Company
World Automation Congress
 ISORA028 Main Menu World Automation Congress Tenth International Symposium on Robotics with Applications Seville, Spain June 28th-July 1st, 2004 Design And Experiences With DLR Hand II J. Butterfaß, M.
ISORA028 Main Menu World Automation Congress Tenth International Symposium on Robotics with Applications Seville, Spain June 28th-July 1st, 2004 Design And Experiences With DLR Hand II J. Butterfaß, M.
Tele-manipulation of a satellite mounted robot by an on-ground astronaut
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Tele-manipulation of a satellite mounted robot by an on-ground astronaut M. Oda, T. Doi, K. Wakata
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Tele-manipulation of a satellite mounted robot by an on-ground astronaut M. Oda, T. Doi, K. Wakata
ESA Strategic Framework for Human Exploration
 ESA Strategic Framework for Human Exploration B. Hufenbach EC Workshop on Space Science and Exploration Madrid, 18/2/13 Strategic Framework ESA DG s Agenda 2015 C/M12 Decisions Strategic Guidelines- Programmes
ESA Strategic Framework for Human Exploration B. Hufenbach EC Workshop on Space Science and Exploration Madrid, 18/2/13 Strategic Framework ESA DG s Agenda 2015 C/M12 Decisions Strategic Guidelines- Programmes
Unmanned on-orbit servicing (OOS), ROKVISS and the TECSAS mission
, ROKVISS and the TECSAS mission") In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 On-Orbit Servicing (OOS), ROKVISS and
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 On-Orbit Servicing (OOS), ROKVISS and
estec PROSPECT Project Objectives & Requirements Document
 estec European Space Research and Technology Centre Keplerlaan 1 2201 AZ Noordwijk The Netherlands T +31 (0)71 565 6565 F +31 (0)71 565 6040 www.esa.int PROSPECT Project Objectives & Requirements Document
estec European Space Research and Technology Centre Keplerlaan 1 2201 AZ Noordwijk The Netherlands T +31 (0)71 565 6565 F +31 (0)71 565 6040 www.esa.int PROSPECT Project Objectives & Requirements Document
CS545 Contents XIV. Components of a Robotic System. Signal Processing. Reading Assignment for Next Class
 CS545 Contents XIV Components of a Robotic System Power Supplies and Power Amplifiers Actuators Transmission Sensors Signal Processing Linear filtering Simple filtering Optimal filtering Reading Assignment
CS545 Contents XIV Components of a Robotic System Power Supplies and Power Amplifiers Actuators Transmission Sensors Signal Processing Linear filtering Simple filtering Optimal filtering Reading Assignment
A TEST-BED FOR THE DEMONSTRATION OF MSS GROUND CONTROL. É. Dupuis*, J.-C. Piedbœuf*, R. Gillett**, K. Landzettel***, B. Brunner***
 A TEST-BED FOR THE DEMONSTRATION OF MSS GROUND CONTROL É. Dupuis*, J.-C. Piedbœuf*, R. Gillett**, K. Landzettel***, B. Brunner*** *Canadian Space Agency, 6767 route de l'aéroport, St-Hubert (Qc) J3Y 8Y9,
A TEST-BED FOR THE DEMONSTRATION OF MSS GROUND CONTROL É. Dupuis*, J.-C. Piedbœuf*, R. Gillett**, K. Landzettel***, B. Brunner*** *Canadian Space Agency, 6767 route de l'aéroport, St-Hubert (Qc) J3Y 8Y9,
AC : INTEGRATED HANDS-ON MECHANICAL SYSTEMS LAB- ORATORIES
 AC 2011-2653: INTEGRATED HANDS-ON MECHANICAL SYSTEMS LAB- ORATORIES Arif Sirinterlikci, Robert Morris University ARIF SIRINTERLIKCI received B.S. and M.S. degrees in Mechanical Engineering from Istanbul
AC 2011-2653: INTEGRATED HANDS-ON MECHANICAL SYSTEMS LAB- ORATORIES Arif Sirinterlikci, Robert Morris University ARIF SIRINTERLIKCI received B.S. and M.S. degrees in Mechanical Engineering from Istanbul
Accessible Power Tool Flexible Application Scalable Solution
 Accessible Power Tool Flexible Application Scalable Solution Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a
Accessible Power Tool Flexible Application Scalable Solution Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Robotics: Evolution, Technology and Applications
 Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
A NOVEL PASSIVE ROBOTIC TOOL INTERFACE
 A NOVEL PASSIVE ROBOTIC TOOL INTERFACE Paul Roberts (1) (1) MDA, 9445 Airport Road, Brampton, ON, Canada, L6S 4J3, paul.roberts@mdacorporation.com ABSTRACT The increased capability of space robotics has
A NOVEL PASSIVE ROBOTIC TOOL INTERFACE Paul Roberts (1) (1) MDA, 9445 Airport Road, Brampton, ON, Canada, L6S 4J3, paul.roberts@mdacorporation.com ABSTRACT The increased capability of space robotics has
The safe & productive robot working without fences
 The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The safe & productive robot working without fences Final Presentation, Stuttgart, May 5 th, 2009 Objectives
The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The safe & productive robot working without fences Final Presentation, Stuttgart, May 5 th, 2009 Objectives
The new German Space Strategy makes the space sector fit for the future Dr. Juergen Drescher DLR Washington Office
 The new German Space Strategy makes the space sector fit for the future Dr. Juergen Drescher DLR Washington Office 6th Eilene M. Galloway Symposium Washington D.C., December 1st, 2011 Space Policy of the
The new German Space Strategy makes the space sector fit for the future Dr. Juergen Drescher DLR Washington Office 6th Eilene M. Galloway Symposium Washington D.C., December 1st, 2011 Space Policy of the
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping
 Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
ROKVISS Verification of Advanced Light Weight Robotic Joints and Tele-Presence Concepts for Future Space Missions
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 ABSTRACT ROKVISS Verification of Advanced
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 ABSTRACT ROKVISS Verification of Advanced
Human-like Assembly Robots in Factories
 5-88 June Symposium on Japan America Frontier of Engineering (JAFOE) Robotics Session: Human-like Assembly Robots in Factories 8th June Robotics Technology R&D Group Shingo Ando 0520 Introduction: Overview
5-88 June Symposium on Japan America Frontier of Engineering (JAFOE) Robotics Session: Human-like Assembly Robots in Factories 8th June Robotics Technology R&D Group Shingo Ando 0520 Introduction: Overview
Is your next colleague a cobot?
 Is your next colleague a cobot? Technifutur 29 November 2016 30.11.16 1 Agenda Main features Cobots vs industrial robots Add-ons Trends Case assessment Demonstrator 30.11.16 2 What s in a name? "Collaborative
Is your next colleague a cobot? Technifutur 29 November 2016 30.11.16 1 Agenda Main features Cobots vs industrial robots Add-ons Trends Case assessment Demonstrator 30.11.16 2 What s in a name? "Collaborative
Read the selection and choose the best answer to each question. Then fill in the answer on your answer document. Science Time
 Read the selection and choose the best answer to each question. Then fill in the answer on your answer document. Science Time December 2013 In this issue: Robot travels to space R2, Robot Astronaut 1 Since
Read the selection and choose the best answer to each question. Then fill in the answer on your answer document. Science Time December 2013 In this issue: Robot travels to space R2, Robot Astronaut 1 Since
Testing a Robotic System for Collecting and Transferring Samples on Mars -
 Testing a Robotic System for Collecting and Transferring Samples on Mars - The Mars Surface Sample Transfer & Manipulation (MSSTM) Project Elie Allouis Elie.Allouis@astrium.eads.net Tony Jorden, Nildeep
Testing a Robotic System for Collecting and Transferring Samples on Mars - The Mars Surface Sample Transfer & Manipulation (MSSTM) Project Elie Allouis Elie.Allouis@astrium.eads.net Tony Jorden, Nildeep
Robot Task-Level Programming Language and Simulation
 Robot Task-Level Programming Language and Simulation M. Samaka Abstract This paper presents the development of a software application for Off-line robot task programming and simulation. Such application
Robot Task-Level Programming Language and Simulation M. Samaka Abstract This paper presents the development of a software application for Off-line robot task programming and simulation. Such application
Elements of Haptic Interfaces
 Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Chapter 1 Introduction
 Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Università di Roma La Sapienza. Medical Robotics. A Teleoperation System for Research in MIRS. Marilena Vendittelli
 Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Clean Space. A new cross-cutting initiative of ESA. The Clean Space Team 15/04/2013. ESA UNCLASSIFIED For Official Use
 Clean Space A new cross-cutting initiative of ESA The Clean Space Team 15/04/2013 Index Introduction Clean Space Branch 3 Space debris mitigation Branch 4 Space debris remediation Implementation Conclusions
Clean Space A new cross-cutting initiative of ESA The Clean Space Team 15/04/2013 Index Introduction Clean Space Branch 3 Space debris mitigation Branch 4 Space debris remediation Implementation Conclusions
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators. Roberto De Vecchi VI-grade Enrico Busto - AddFor
 ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
Credits. National Aeronautics and Space Administration. United Space Alliance, LLC. John Frassanito and Associates Strategic Visualization
 A New Age in Space The Vision for Space Exploration Credits National Aeronautics and Space Administration United Space Alliance, LLC John Frassanito and Associates Strategic Visualization Coalition for
A New Age in Space The Vision for Space Exploration Credits National Aeronautics and Space Administration United Space Alliance, LLC John Frassanito and Associates Strategic Visualization Coalition for
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
ACTUATORS AND SENSORS. Joint actuating system. Servomotors. Sensors
 ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
Technifutur. Maarten Daemen Sales Engineer / KUKA Automatisering + Robots NV KUKA LBR iiwa M. Daemen
 Technifutur Maarten Daemen Sales Engineer / KUKA Automatisering + Robots NV 2016-11-28 page: 1 ii invite you page: 2 LBR iiwa LBR stands for Leichtbauroboter (German for lightweight robot), iiwa for intelligent
Technifutur Maarten Daemen Sales Engineer / KUKA Automatisering + Robots NV 2016-11-28 page: 1 ii invite you page: 2 LBR iiwa LBR stands for Leichtbauroboter (German for lightweight robot), iiwa for intelligent
Towards Interactive Learning for Manufacturing Assistants. Andreas Stopp Sven Horstmann Steen Kristensen Frieder Lohnert
 Towards Interactive Learning for Manufacturing Assistants Andreas Stopp Sven Horstmann Steen Kristensen Frieder Lohnert DaimlerChrysler Research and Technology Cognition and Robotics Group Alt-Moabit 96A,
Towards Interactive Learning for Manufacturing Assistants Andreas Stopp Sven Horstmann Steen Kristensen Frieder Lohnert DaimlerChrysler Research and Technology Cognition and Robotics Group Alt-Moabit 96A,
SIMULATION OF VIRTUAL MACHINE TOOL DURING THE DEVELOPMENT PHASE SVOČ FST 2016
 SIMULATION OF VIRTUAL MACHINE TOOL DURING THE DEVELOPMENT PHASE SVOČ FST 2016 ABSTRACT Ing. Zdeněk Hájíček, West Bohemia University, Univerzitni 8, 306 14 Pilsen Czech Republic This paper deals with the
SIMULATION OF VIRTUAL MACHINE TOOL DURING THE DEVELOPMENT PHASE SVOČ FST 2016 ABSTRACT Ing. Zdeněk Hájíček, West Bohemia University, Univerzitni 8, 306 14 Pilsen Czech Republic This paper deals with the
The design and making of a humanoid robotic hand
 The design and making of a humanoid robotic hand presented by Tian Li Research associate Supervisor s Name: Prof. Nadia Magnenat Thalmann,Prof. Daniel Thalmann & Prof. Jianmin Zheng Project 2: Mixed Society
The design and making of a humanoid robotic hand presented by Tian Li Research associate Supervisor s Name: Prof. Nadia Magnenat Thalmann,Prof. Daniel Thalmann & Prof. Jianmin Zheng Project 2: Mixed Society
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
High-Level Programming for Industrial Robotics: using Gestures, Speech and Force Control
 High-Level Programming for Industrial Robotics: using Gestures, Speech and Force Control Pedro Neto, J. Norberto Pires, Member, IEEE Abstract Today, most industrial robots are programmed using the typical
High-Level Programming for Industrial Robotics: using Gestures, Speech and Force Control Pedro Neto, J. Norberto Pires, Member, IEEE Abstract Today, most industrial robots are programmed using the typical
How To Create The Right Collaborative System For Your Application. Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation
 How To Create The Right Collaborative System For Your Application Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation C Definitions Cobot: for this presentation a robot specifically designed
How To Create The Right Collaborative System For Your Application Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation C Definitions Cobot: for this presentation a robot specifically designed
Self-Adapting Parallel Kinematic Machines
 Self-Adapting Parallel Kinematic Machines Karl-Erik Neumann Exechon AB ABSTRACT Historically, assembly of large aerospace structures has always required large, heavy duty, expensive machines designed and
Self-Adapting Parallel Kinematic Machines Karl-Erik Neumann Exechon AB ABSTRACT Historically, assembly of large aerospace structures has always required large, heavy duty, expensive machines designed and
Wireless Robust Robots for Application in Hostile Agricultural. environment.
 Wireless Robust Robots for Application in Hostile Agricultural Environment A.R. Hirakawa, A.M. Saraiva, C.E. Cugnasca Agricultural Automation Laboratory, Computer Engineering Department Polytechnic School,
Wireless Robust Robots for Application in Hostile Agricultural Environment A.R. Hirakawa, A.M. Saraiva, C.E. Cugnasca Agricultural Automation Laboratory, Computer Engineering Department Polytechnic School,
Lecture 9: Teleoperation
 ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 9: Teleoperation Allison M. Okamura Stanford University teleoperation history and examples the genesis of teleoperation? a Polygraph is
ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 9: Teleoperation Allison M. Okamura Stanford University teleoperation history and examples the genesis of teleoperation? a Polygraph is
Gael Force FRC Team 126
 Gael Force FRC Team 126 2018 FIRST Robotics Competition 2018 Robot Information and Specs Judges Information Packet Gael Force is proof that one team from a small town can have an incredible impact on many
Gael Force FRC Team 126 2018 FIRST Robotics Competition 2018 Robot Information and Specs Judges Information Packet Gael Force is proof that one team from a small town can have an incredible impact on many
ROBO-PARTNER: Safe human-robot collaboration for assembly: case studies and challenges
 ROBO-PARTNER: Safe human-robot collaboration for assembly: case studies and challenges Dr. George Michalos University of Patras ROBOT FORUM ASSEMBLY 16 March 2016 Parma, Italy Introduction Human sensitivity
ROBO-PARTNER: Safe human-robot collaboration for assembly: case studies and challenges Dr. George Michalos University of Patras ROBOT FORUM ASSEMBLY 16 March 2016 Parma, Italy Introduction Human sensitivity
Practical Application of MBSE to Early Phase Space System Development
 DLR.de Chart 1 > PRACTICAL APPLICATION OF MBSE TO SPACE SYSTEM DEVELOPMENT > M Kretzenbacher 07.10.16 Practical Application of MBSE to Early Phase Space System Development Professional Thesis Project Michael
DLR.de Chart 1 > PRACTICAL APPLICATION OF MBSE TO SPACE SYSTEM DEVELOPMENT > M Kretzenbacher 07.10.16 Practical Application of MBSE to Early Phase Space System Development Professional Thesis Project Michael
ROBOTIC AUGMENTATION OF EVA FOR HUBBLE SPACE TELESCOPE SERVICING
 ROBOTIC AUGMENTATION OF EVA FOR HUBBLE SPACE TELESCOPE SERVICING David L. Akin * Brian Roberts Kristin Pilotte Meghan Baker ABSTRACT The University of Maryland Space Systems Laboratory has developed the
ROBOTIC AUGMENTATION OF EVA FOR HUBBLE SPACE TELESCOPE SERVICING David L. Akin * Brian Roberts Kristin Pilotte Meghan Baker ABSTRACT The University of Maryland Space Systems Laboratory has developed the
The Evolution of Nano-Satellite Proximity Operations In-Space Inspection Workshop 2017
 The Evolution of Nano-Satellite Proximity Operations 02-01-2017 In-Space Inspection Workshop 2017 Tyvak Introduction We develop miniaturized custom spacecraft, launch solutions, and aerospace technologies
The Evolution of Nano-Satellite Proximity Operations 02-01-2017 In-Space Inspection Workshop 2017 Tyvak Introduction We develop miniaturized custom spacecraft, launch solutions, and aerospace technologies
On-Orbit Servicing Mission Operations at GSOC
 SpaceOps 2010 ConferenceDelivering on the DreamHosted by NASA Mars 25-30 April 2010, Huntsville, Alabama AIAA 2010-1975 On-Orbit Servicing Mission Operations at GSOC S. Eberle
SpaceOps 2010 ConferenceDelivering on the DreamHosted by NASA Mars 25-30 April 2010, Huntsville, Alabama AIAA 2010-1975 On-Orbit Servicing Mission Operations at GSOC S. Eberle
Say hello to BAXTER! A.P.R.I.L. Project - Residential Workshop Plymouth MSc. CNCR Gabriella Pizzuto & MSc. Eng. Ricardo de Azambuja
 Say hello to BAXTER! A.P.R.I.L. Project - Residential Workshop Plymouth 2016 MSc. CNCR Gabriella Pizzuto & MSc. Eng. Ricardo de Azambuja By the end of this workshop, you should be able to: Understand what
Say hello to BAXTER! A.P.R.I.L. Project - Residential Workshop Plymouth 2016 MSc. CNCR Gabriella Pizzuto & MSc. Eng. Ricardo de Azambuja By the end of this workshop, you should be able to: Understand what
Biologically Inspired Robot Manipulator for New Applications in Automation Engineering
 Preprint of the paper which appeared in the Proc. of Robotik 2008, Munich, Germany, June 11-12, 2008 Biologically Inspired Robot Manipulator for New Applications in Automation Engineering Dipl.-Biol. S.
Preprint of the paper which appeared in the Proc. of Robotik 2008, Munich, Germany, June 11-12, 2008 Biologically Inspired Robot Manipulator for New Applications in Automation Engineering Dipl.-Biol. S.
FROM TORQUE-CONTROLLED TO INTRINSICALLY COMPLIANT
 FROM TORQUE-CONTROLLED TO INTRINSICALLY COMPLIANT HUMANOID by Christian Ott 1 Alexander Dietrich Daniel Leidner Alexander Werner Johannes Englsberger Bernd Henze Sebastian Wolf Maxime Chalon Werner Friedl
FROM TORQUE-CONTROLLED TO INTRINSICALLY COMPLIANT HUMANOID by Christian Ott 1 Alexander Dietrich Daniel Leidner Alexander Werner Johannes Englsberger Bernd Henze Sebastian Wolf Maxime Chalon Werner Friedl
Hyperspectral Systems: Recent Developments and Low Cost Sensors. 56th Photogrammetric Week in Stuttgart, September 11 to September 15, 2017
 Hyperspectral Systems: Recent Developments and Low Cost Sensors 56th Photogrammetric Week in Stuttgart, September 11 to September 15, 2017 Ralf Reulke Humboldt-Universität zu Berlin Institut für Informatik,
Hyperspectral Systems: Recent Developments and Low Cost Sensors 56th Photogrammetric Week in Stuttgart, September 11 to September 15, 2017 Ralf Reulke Humboldt-Universität zu Berlin Institut für Informatik,
Modeling and Experimental Studies of a Novel 6DOF Haptic Device
 Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations and Exploration Systems
 Walt Truszkowski, Harold L. Hallock, Christopher Rouff, Jay Karlin, James Rash, Mike Hinchey, and Roy Sterritt Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations
Walt Truszkowski, Harold L. Hallock, Christopher Rouff, Jay Karlin, James Rash, Mike Hinchey, and Roy Sterritt Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations
DiVA Digitala Vetenskapliga Arkivet
 DiVA Digitala Vetenskapliga Arkivet http://umu.diva-portal.org This is a paper presented at First International Conference on Robotics and associated Hightechnologies and Equipment for agriculture, RHEA-2012,
DiVA Digitala Vetenskapliga Arkivet http://umu.diva-portal.org This is a paper presented at First International Conference on Robotics and associated Hightechnologies and Equipment for agriculture, RHEA-2012,
Preparation of the Electronic Paper for the Proceedings of the. 11th Int. WS on Simulation & EGSE facilities for Space Programmes SESP 2010
 Preparation of the Electronic Paper for the Proceedings of the 11th Int. WS on Simulation & EGSE facilities for Space Programmes SESP 21 28-3 September at ESTEC, Noordwijk, the Netherlands HARDWARE IN-THE-LOOP
Preparation of the Electronic Paper for the Proceedings of the 11th Int. WS on Simulation & EGSE facilities for Space Programmes SESP 21 28-3 September at ESTEC, Noordwijk, the Netherlands HARDWARE IN-THE-LOOP
Gripper Telemanipulation System for the PR2 Robot. Jason Allen, SUNFEST (EE), University of the District of Columbia Advisor: Dr. Camillo J.
, University of the District of Columbia Advisor: Dr. Camillo J.") Gripper Telemanipulation System for the PR2 Robot Jason Allen, SUNFEST (EE), University of the District of Columbia Advisor: Dr. Camillo J. Taylor Abstract The most common method of teleoperation has an
Gripper Telemanipulation System for the PR2 Robot Jason Allen, SUNFEST (EE), University of the District of Columbia Advisor: Dr. Camillo J. Taylor Abstract The most common method of teleoperation has an
Design and Operation of Micro-Gravity Dynamics and Controls Laboratories
 Design and Operation of Micro-Gravity Dynamics and Controls Laboratories Georgia Institute of Technology Space Systems Engineering Conference Atlanta, GA GT-SSEC.F.4 Alvar Saenz-Otero David W. Miller MIT
Design and Operation of Micro-Gravity Dynamics and Controls Laboratories Georgia Institute of Technology Space Systems Engineering Conference Atlanta, GA GT-SSEC.F.4 Alvar Saenz-Otero David W. Miller MIT
HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA
 HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA RIKU HIKIJI AND SHUJI HASHIMOTO Department of Applied Physics, School of Science and Engineering, Waseda University 3-4-1
HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA RIKU HIKIJI AND SHUJI HASHIMOTO Department of Applied Physics, School of Science and Engineering, Waseda University 3-4-1
Education Programs Synergies
 www.dlr.de Chart 1 > Vortrag > Autor Dokumentname > Datum Education Programs Synergies Dieter Hausamann, DLR Antonios Mouratidis, ESA WGCapD-2 Meeting March 4 6, 2013 Frascati, Italy Our Goals Attract
www.dlr.de Chart 1 > Vortrag > Autor Dokumentname > Datum Education Programs Synergies Dieter Hausamann, DLR Antonios Mouratidis, ESA WGCapD-2 Meeting March 4 6, 2013 Frascati, Italy Our Goals Attract
Bring the Challenge. We ll Build the Solution.
 VISIONARY Bring the Challenge. We ll Build the Solution. Solving complex engineering challenges in a global market, Celera Motion advances the field and science of motion control. Our precision components
VISIONARY Bring the Challenge. We ll Build the Solution. Solving complex engineering challenges in a global market, Celera Motion advances the field and science of motion control. Our precision components
Available theses (October 2012) MERLIN Group
 MERLIN Group") Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Chart No. 1 > EUCASS > Rolf DENSING Dr. Rolf Densing DLR Director of Space Programs
 www.dlr.de Chart No. 1 > EUCASS 03.07.2013 > Rolf DENSING Dr. Rolf Densing DLR Director of Space Programs www.dlr.de Chart No. 2 > EUCASS 03.07.2013 > Rolf DENSING European Space Transportation 2020 What
www.dlr.de Chart No. 1 > EUCASS 03.07.2013 > Rolf DENSING Dr. Rolf Densing DLR Director of Space Programs www.dlr.de Chart No. 2 > EUCASS 03.07.2013 > Rolf DENSING European Space Transportation 2020 What
ISMCR2004. Abstract. 2. The mechanism of the master-slave arm of Telesar II. 1. Introduction. D21-Page 1
 Development of Multi-D.O.F. Master-Slave Arm with Bilateral Impedance Control for Telexistence Riichiro Tadakuma, Kiyohiro Sogen, Hiroyuki Kajimoto, Naoki Kawakami, and Susumu Tachi 7-3-1 Hongo, Bunkyo-ku,
Development of Multi-D.O.F. Master-Slave Arm with Bilateral Impedance Control for Telexistence Riichiro Tadakuma, Kiyohiro Sogen, Hiroyuki Kajimoto, Naoki Kawakami, and Susumu Tachi 7-3-1 Hongo, Bunkyo-ku,
Introduction to Robotics in CIM Systems
 Introduction to Robotics in CIM Systems Fifth Edition James A. Rehg The Pennsylvania State University Altoona, Pennsylvania Prentice Hall Upper Saddle River, New Jersey Columbus, Ohio Contents Introduction
Introduction to Robotics in CIM Systems Fifth Edition James A. Rehg The Pennsylvania State University Altoona, Pennsylvania Prentice Hall Upper Saddle River, New Jersey Columbus, Ohio Contents Introduction