Event-based Algorithms for Robust and High-speed Robotics
|
|
|
- Candace Webb
- 5 years ago
- Views:
Transcription


1 Event-based Algorithms for Robust and High-speed Robotics Davide Scaramuzza All my research on event-based vision is summarized on this page: Davide Scaramuzza University of Zurich -
 Video credit: LEXUS")
2 My Dream Robot Agile, lightweight drones rapidly navigating to accomplish a given task Challenges: fast, lightweight, agile (low-latency perception & control) Video credit: LEXUS commercial, 2013
 [IJCV 11, PAMI")
![13, RSS 15, TRO 16-17] Vision-based](/docs-images/92/110279025/images/3-1.jpg "Navigation of Flying Robots [ICRA 10,")
![AURO 12, RAM 14, JFR 15] Deep Learning](/docs-images/92/110279025/images/3-2.jpg "for End-to-End Navigation [RAL 16-17]")

3 Our Research Areas Visual-Inertial State Estimation (SVO) [IJCV 11, PAMI 13, RSS 15, TRO 16-17] Vision-based Navigation of Flying Robots [ICRA 10, AURO 12, RAM 14, JFR 15] Deep Learning for End-to-End Navigation [RAL 16-17] Low-latency vision for Aggressive Flight [IROS 3, ICRA 14, RSS 15, BMVC 16, RAL 17]

4 The Challenge of Vision Controlled Drones Current flight maneuvers achieved with onboard cameras are still to slow compared with those attainable by birds or FPV pilots A sparrowhawk catching a garden bird (National Geographic)
5 To go faster, we need faster sensors! [IROS 13] The agility of a robot is limited by the latency and temporal discretization of its sensing pipeline. frame events stream next frame time time computation command command latency latency temporal discretization discretization The average robot-vision algorithms have latencies of ms, which puts a hard bound on the agility of the platform Event cameras enable low-latency sensory motor control (<< 1ms) A. Censi, J. Strubel, C. Brandli, T. Delbruck, D. Scaramuzza, Low-latency localization by Active LED Markers tracking using a Dynamic Vision Sensor, IROS 13
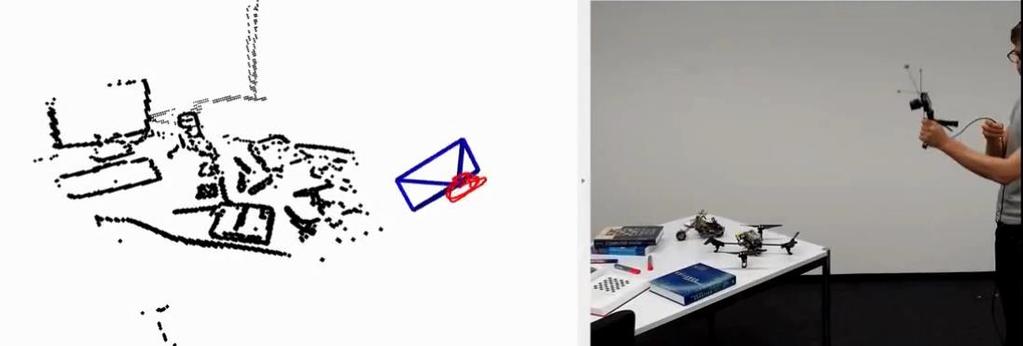
6 Event-based, 6-DOF Pose Tracking from Line-based Maps Mueggler, Huber, Scaramuzza, IROS 14 Mueggler, Huber, Scaramuzza, "Event-based, 6-DOF Pose Tracking for High-Speed Maneuvers, IROS 14
![Quadrotor Flip (1,200 deg/s) [IROS 14, RSS 15] Video: http://youtu.](/docs-images/92/110279025/images/7-0.jpg "be/lauq6lwtkxm Mueggler, Huber, Scaramuzza, \"Event-based, 6-DOF Pose Tracking for")
7 Quadrotor Flip (1,200 deg/s) [IROS 14, RSS 15] Video: Mueggler, Huber, Scaramuzza, "Event-based, 6-DOF Pose Tracking for High-Speed Maneuvers, IROS 14
8 Event-based 6-DOF pose Tracking Optimization-based (minimizes reprojection error) Assumption: line-based maps Estimated motion Mueggler, Huber, Scaramuzza, "Event-based, 6-DOF Pose Tracking for High-Speed Maneuvers, IROS 14
9 Event-based, Pose Tracking from High-Contrast Scenes Censi, Scaramuzza ICRA 14 Censi, Scaramuzza, Low-Latency Event-Based Visual Odometry, ICRA 14
![Pose Estimation from from High Contrast Scenes [ICRA 14] 3 DOF Tracking (planar motion) Planar motion & known map Recursive](/docs-images/92/110279025/images/10-0.jpg "estimation Measurement model: P(e) I, u t u Z P v p u I C Y X Censi, Scaramuzza, Low-Latency Event-Based Visual Odometry, ICRA")
10 Pose Estimation from from High Contrast Scenes [ICRA 14] 3 DOF Tracking (planar motion) Planar motion & known map Recursive estimation Measurement model: P(e) I, u t u Z P v p u I C Y X Censi, Scaramuzza, Low-Latency Event-Based Visual Odometry, ICRA 14
11 Event-based, 6-DOF Pose Tracking from Photometric Depth Maps Gallego, Lund, Mueggler, Rebecq, Delbruck, Scaramuzza ArXiv, 2016 submitted to PAMI [Gallego et al., Event-based, 6-DOF Camera Tracking for High-Speed Applications, Arxiv 16]


12 Problem statement Given a photometric depth map, track the 6-DOF pose of the DVS event by event How to get a photometric depth map? Dense reconstruction based on standard cameras (DTAM, REMODE) RGB-D cameras Reference frames plus depth
13 Methodology Probabilistic approach (Bayesian filter): State vector: s = (R, T, C, σ C, ρ) pose (R,T), contrast mean value C uncertainty σ C, inlier ratio ρ Motion model: random walk Robust sensor model (likelihood) p s e log I(t) Posterior Likelihood Prior Measurement function derived from generative event model: logi t logi t t = C M(e s) = logi 1 C = p e s p(s) ON ON ON ON Mixture model: heavy-tail Gaussian distribution (i.e., Gaussian + Uniform): p e s = ρn M e s, 0, σ + 1 ρ U(M min, M max )

14 Results: high-speed motion Video: [Gallego et al., Event-based, 6-DOF Camera Tracking for High-Speed Applications, Arxiv 16]
15 EVO: A Geometric Approach to Event-based 6-DOF Parallel Tracking and Mapping in Real-time Rebecq, Horstschäfer, Gallego, Scaramuzza IEEE Robotics & Automation Letters, 01/2017 (presented at ICRA 17) EU Patent 2017 Rebecq, Horstschaefer, Gallego, Scaramuzza, EVO: Geometric Approach to 6-DoF Event-based Tracking and Mapping in Real Time, IEE Robotics and Automation Letters, Also EU Patent
16 Parallel Tracking and Mapping 6-DOF pose Tracking Mapping 3D map Rebecq, Horstschaefer, Gallego, Scaramuzza, EVO: Geometric Approach to 6-DoF Event-based Tracking and Mapping in Real Time, IEE Robotics and Automation Letters, Also EU Patent
17 How the 3D mapping works An event camera reacts to strong gradients in the scene Areas of high ray-density likely indicate the presence of 3D structures
 Projective sampling grid")


18 How the 3D mapping works Ray-density: Disparity Space Image (DSI) Projective sampling grid (DSI) + adaptive thresholding Non-uniform, projective grid, centered on a reference viewpoint EMVS: Event-based Multi-View Stereo, Rebecq, Gallego, Scaramuzza, BMVC 16, Best Industry Paper Award
) Rigid-body transformation T minimizes alignment error: T = argmin M u I W u;")

19 How the tracking works I: Event image (accumulating events) Global image alignment through 6 DOF warp W W u; T π(t π 1 (u, d u )) Rigid-body transformation T minimizes alignment error: T = argmin M u I W u; T u 2 M: = Projected map Rebecq, Horstschaefer, Gallego, Scaramuzza, EVO: Geometric Approach to 6-DoF Event-based Tracking and Mapping in Real Time, IEE Robotics and Automation Letters, Also EU Patent

20 Results High-Speed tracking Rebecq, Horstschaefer, Gallego, Scaramuzza, EVO: Geometric Approach to 6-DoF Event-based Tracking and Mapping in Real Time, IEE Robotics and Automation Letters, Also EU Patent Video: Events (Blue Standard camera
21 EVO: Multi-Keyframe Scene Video: Observed and reprojected events Intensity reconstruction from events Frame of a standard camera plus events

22 Light On and OFF Experiment Video: Observed and reprojected events Intensity reconstruction from events Frame of a standard camera plus events


23 Rebecq, Horstschaefer, Gallego, Scaramuzza, EVO: Geometric Approach to 6-DoF Event-based Tracking and Mapping in Real Time, IEE Robotics and Automation Letters, Also EU Patent EVO Robustness to High-Dynamic Range Scenes iphone camera Video: Standard camera Image reconstructed from the events only Events

24 3D Mapping from a Train Video:
25 Summary of EVO Very simple to implement Works even in high-speed and HDR scenes, where standard cameras fail Real-time even on a smartphone CPUs (Odroid XU4)! Intensity reconstruction not needed but available Come and see our live demo!
26 Continuous-Time Visual-Inertial Trajectory Estimation with Event Cameras Mueggler, Gallego, Rebecq, Scaramuzza ArXiv, 2017 submitted to TRO [Mueggler, Gallego, Scaramuzza: Continuous-Time Trajectory Estimation for Event-based Vision Sensors, RSS 15] [Mueggler, Gallego, Rebecq, Scaramuzza: Continuous-Time Visual-Inertial Trajectory Estimation with Event Cameras, under review, on arxiv, submitted to TRO 17]
27 Continuous-Time Trajectory Estimation [RSS 15, Arxiv 17] Event stream is asynchronous and high-frequency (almost continuous) A single event is ambiguous and does not constrain a pose [Mueggler, Gallego, Scaramuzza: Continuous-Time Trajectory Estimation for Event-based Vision Sensors, RSS 15] [Mueggler, Gallego, Rebecq, Scaramuzza: Continuous-Time Visual-Inertial Trajectory Estimation with Event Cameras, under review, on arxiv, submitted to TRO 17]
28 Continuous-Time Trajectory Estimation [RSS 15, Arxiv 17] Estimate trajectory instead of discrete poses: T 1, T 2, T 3, T(t) Advantages Pose (and its derivatives) is well-defined at any time Can handle asynchronous, high-frequency data naturally Spline Fusion [Lovegrove, IJCV 15] Trajectory is represented with B-splines Cumulative basis functions on SE(3), free from singularities:
29 Optimization Find control poses T w,i and parameters θ (map scale, gravity alignment, and IMU biases) such that reprojection error of all events and the inertial residuals is minimized: Events Inertial Measurements Few control poses are needed: 1 control pose per 10,000 events



30 Results
31 Real-time Visual-Inertial Odometry for Event Cameras using Keyframe-based Nonlinear Optimization Rebecq, Horstschäfer, Scaramuzza submitted to BMVC 17
32 Visual-Inertial Fusion via Non-linear Optimization Fusion solved as a non-linear optimization problem Increased accuracy over filtering methods IMU residuals Reprojection residuals Forster, Carlone, Dellaert, Scaramuzza, On-Manifold Preintegration for Real-Time Visual-Inertial Odometry, RSS 15, TRO 17 Leutenegger, Lynen, Bosse, Siegwart, Furgale, Keyframe-based visual inertial odometry using nonlinear optimization, RSS 13, IJRR 15
.")
33 Computation time per event frame: 8ms on an i7 Lenovo quadcore CPU and ~30ms on smartophone CPU (Odroid XU4). Come and see our live demo!

34 Conclusions Event cameras are revolutionary and open enormous possibilities! Robustness to high speed motion and high-dynamic-range scenes Standard cameras have been studied for 50 years! need of a change! Challenges: asynchronous & binary output, complete noise & model characterization still missing (e.g., memory effects and other non idealities) Future: low-latency perception and control via a two-level sensing architecture Fast low-latency level: where agile behavior is obtained by a low-latency control action that uses data from fast sensors (e.g., DVS, IMU) Slow cognitive level: tasks, such as recognition, mapping, & loop closing, are done based on slower traditional sensors (cameras, lidars) Censi & Scaramuzza, «Low Latency, Event-based Visual Odometry», ICRA 14
![Event Camera Dataset and Simulator [IJRR 17] Publicly available: http://rpg.ifi.uzh.ch/davis_data.](/docs-images/92/110279025/images/35-0.jpg "html First event camera dataset specifically made for VO and SLAM Many diverse scenes: HDR, Indoors, Outdoors, High-speed Blender simulator of event cameras Includes IMU Frames Events Ground truth")
35 Event Camera Dataset and Simulator [IJRR 17] Publicly available: First event camera dataset specifically made for VO and SLAM Many diverse scenes: HDR, Indoors, Outdoors, High-speed Blender simulator of event cameras Includes IMU Frames Events Ground truth from a motion capture system Mueggler, Rebecq, Gallego, Delbruck, Scaramuzza, The Event Camera Dataset and Simulator: Event-based Data for Pose Estimation, Visual Odometry, and SLAM, International Journal of Robotics Research, IJRR, 2017.







36 Thanks! Dr. Guillermo Gallego Elias Mueggler Henri Rebecq Timo Horstschäfer
37 Resources My research on event-based vision: Event camera dataset and simulator: Lab homepage: Other Software & Datasets: YouTube: Publications:
Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots
 Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots Davide Scaramuzza Robotics and Perception Group University of Zurich http://rpg.ifi.uzh.ch All videos in
Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots Davide Scaramuzza Robotics and Perception Group University of Zurich http://rpg.ifi.uzh.ch All videos in
Silicon retina technology
 Silicon retina technology Tobi Delbruck Inst. of Neuroinformatics, University of Zurich and ETH Zurich Sensors Group sensors.ini.uzh.ch Sponsors: Swiss National Science Foundation NCCR Robotics project,
Silicon retina technology Tobi Delbruck Inst. of Neuroinformatics, University of Zurich and ETH Zurich Sensors Group sensors.ini.uzh.ch Sponsors: Swiss National Science Foundation NCCR Robotics project,
Walking and Flying Robots for Challenging Environments
 Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization
 Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
COS Lecture 7 Autonomous Robot Navigation
 COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Light Condition Invariant Visual SLAM via Entropy based Image Fusion
 Light Condition Invariant Visual SLAM via Entropy based Image Fusion Joowan Kim1 and Ayoung Kim1 1 Department of Civil and Environmental Engineering, KAIST, Republic of Korea (Tel : +82-42-35-3672; E-mail:
Light Condition Invariant Visual SLAM via Entropy based Image Fusion Joowan Kim1 and Ayoung Kim1 1 Department of Civil and Environmental Engineering, KAIST, Republic of Korea (Tel : +82-42-35-3672; E-mail:
Intelligent Vehicle Localization Using GPS, Compass, and Machine Vision
 The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Intelligent Vehicle Localization Using GPS, Compass, and Machine Vision Somphop Limsoonthrakul,
The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Intelligent Vehicle Localization Using GPS, Compass, and Machine Vision Somphop Limsoonthrakul,
The Autonomous Robots Lab. Kostas Alexis
 The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
4D-Particle filter localization for a simulated UAV
 4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
fast blur removal for wearable QR code scanners
 fast blur removal for wearable QR code scanners Gábor Sörös, Stephan Semmler, Luc Humair, Otmar Hilliges ISWC 2015, Osaka, Japan traditional barcode scanning next generation barcode scanning ubiquitous
fast blur removal for wearable QR code scanners Gábor Sörös, Stephan Semmler, Luc Humair, Otmar Hilliges ISWC 2015, Osaka, Japan traditional barcode scanning next generation barcode scanning ubiquitous
Towards Autonomous Planetary Exploration Collaborative Multi-Robot Localization and Mapping in GPS-denied Environments
 DLR.de Chart 1 International Technical Symposium on Navigation and Timing (ITSNT) Toulouse, France, 2017 Towards Autonomous Planetary Exploration Collaborative Multi-Robot Localization and Mapping in GPS-denied
DLR.de Chart 1 International Technical Symposium on Navigation and Timing (ITSNT) Toulouse, France, 2017 Towards Autonomous Planetary Exploration Collaborative Multi-Robot Localization and Mapping in GPS-denied
Robots Leaving the Production Halls Opportunities and Challenges
 Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Thermal Image Enhancement Using Convolutional Neural Network
 SEOUL Oct.7, 2016 Thermal Image Enhancement Using Convolutional Neural Network Visual Perception for Autonomous Driving During Day and Night Yukyung Choi Soonmin Hwang Namil Kim Jongchan Park In So Kweon
SEOUL Oct.7, 2016 Thermal Image Enhancement Using Convolutional Neural Network Visual Perception for Autonomous Driving During Day and Night Yukyung Choi Soonmin Hwang Namil Kim Jongchan Park In So Kweon
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
GPS data correction using encoders and INS sensors
 GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
VSI Labs The Build Up of Automated Driving
 VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
Séminaire Voiture Autonome: Technologies, Enjeux et Applications February , Paris (France) Asprom UIMM Cap Tronic
 Asprom UIMM Cap Tronic") Embedded Perception & Risk Assessment for next Cars Generation Christian LAUGIER, Research Director at Inria Chroma Team & IRT Nanolec Christian.laugier@inria.fr Contributions from Mathias Perrollaz, Christopher
Embedded Perception & Risk Assessment for next Cars Generation Christian LAUGIER, Research Director at Inria Chroma Team & IRT Nanolec Christian.laugier@inria.fr Contributions from Mathias Perrollaz, Christopher
Recent Advances in Image Deblurring. Seungyong Lee (Collaboration w/ Sunghyun Cho)
") Recent Advances in Image Deblurring Seungyong Lee (Collaboration w/ Sunghyun Cho) Disclaimer Many images and figures in this course note have been copied from the papers and presentation materials of previous
Recent Advances in Image Deblurring Seungyong Lee (Collaboration w/ Sunghyun Cho) Disclaimer Many images and figures in this course note have been copied from the papers and presentation materials of previous
The Future of AI A Robotics Perspective
 The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
Perception. Introduction to HRI Simmons & Nourbakhsh Spring 2015
 Perception Introduction to HRI Simmons & Nourbakhsh Spring 2015 Perception my goals What is the state of the art boundary? Where might we be in 5-10 years? The Perceptual Pipeline The classical approach:
Perception Introduction to HRI Simmons & Nourbakhsh Spring 2015 Perception my goals What is the state of the art boundary? Where might we be in 5-10 years? The Perceptual Pipeline The classical approach:
Research Statement MAXIM LIKHACHEV
 Research Statement MAXIM LIKHACHEV My long-term research goal is to develop a methodology for robust real-time decision-making in autonomous systems. To achieve this goal, my students and I research novel
Research Statement MAXIM LIKHACHEV My long-term research goal is to develop a methodology for robust real-time decision-making in autonomous systems. To achieve this goal, my students and I research novel
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition
 Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
07/ /2008 Research and Teaching Assistant, Department of Mechanical and Process Engineering (D-MAVT), ETH Zurich, Switzerland
, ETH Zurich, Switzerland") Davide Scaramuzza Post-Doctoral Researcher, Lecturer, Scientific Manager of EU Project Project leader Autonomous System Lab ETH Zurich Nationality: Date of Birth: Place of Birth: URL: E-mail: Address:
Davide Scaramuzza Post-Doctoral Researcher, Lecturer, Scientific Manager of EU Project Project leader Autonomous System Lab ETH Zurich Nationality: Date of Birth: Place of Birth: URL: E-mail: Address:
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
GNSS in Autonomous Vehicles MM Vision
 GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision
GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision
INDOOR HEADING MEASUREMENT SYSTEM
 INDOOR HEADING MEASUREMENT SYSTEM Marius Malcius Department of Research and Development AB Prospero polis, Lithuania m.malcius@orodur.lt Darius Munčys Department of Research and Development AB Prospero
INDOOR HEADING MEASUREMENT SYSTEM Marius Malcius Department of Research and Development AB Prospero polis, Lithuania m.malcius@orodur.lt Darius Munčys Department of Research and Development AB Prospero
On Sampling Focal Length Values to Solve the Absolute Pose Problem
 On Sampling Focal Length Values to Solve the Absolute Pose Problem Torsten Sattler, Chris Sweeney 2, and Marc Pollefeys Department of Computer Science, ETH Zürich, Zürich, Switzerland 2 University of California
On Sampling Focal Length Values to Solve the Absolute Pose Problem Torsten Sattler, Chris Sweeney 2, and Marc Pollefeys Department of Computer Science, ETH Zürich, Zürich, Switzerland 2 University of California
Immersive Aerial Cinematography
 Immersive Aerial Cinematography Botao (Amber) Hu 81 Adam Way, Atherton, CA 94027 botaohu@cs.stanford.edu Qian Lin Department of Applied Physics, Stanford University 348 Via Pueblo, Stanford, CA 94305 linqian@stanford.edu
Immersive Aerial Cinematography Botao (Amber) Hu 81 Adam Way, Atherton, CA 94027 botaohu@cs.stanford.edu Qian Lin Department of Applied Physics, Stanford University 348 Via Pueblo, Stanford, CA 94305 linqian@stanford.edu
Invited talk IET-Renault Workshop Autonomous Vehicles: From theory to full scale applications Novotel Paris Les Halles, June 18 th 2015
 Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
Spring 2018 CS543 / ECE549 Computer Vision. Course webpage URL:
 Spring 2018 CS543 / ECE549 Computer Vision Course webpage URL: http://slazebni.cs.illinois.edu/spring18/ The goal of computer vision To extract meaning from pixels What we see What a computer sees Source:
Spring 2018 CS543 / ECE549 Computer Vision Course webpage URL: http://slazebni.cs.illinois.edu/spring18/ The goal of computer vision To extract meaning from pixels What we see What a computer sees Source:
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Mobile Cognitive Indoor Assistive Navigation for the Visually Impaired
 1 Mobile Cognitive Indoor Assistive Navigation for the Visually Impaired Bing Li 1, Manjekar Budhai 2, Bowen Xiao 3, Liang Yang 1, Jizhong Xiao 1 1 Department of Electrical Engineering, The City College,
1 Mobile Cognitive Indoor Assistive Navigation for the Visually Impaired Bing Li 1, Manjekar Budhai 2, Bowen Xiao 3, Liang Yang 1, Jizhong Xiao 1 1 Department of Electrical Engineering, The City College,
Range Sensing strategies
 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path
 Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path Taichi Yamada 1, Yeow Li Sa 1 and Akihisa Ohya 1 1 Graduate School of Systems and Information Engineering, University of Tsukuba, 1-1-1,
Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path Taichi Yamada 1, Yeow Li Sa 1 and Akihisa Ohya 1 1 Graduate School of Systems and Information Engineering, University of Tsukuba, 1-1-1,
arxiv: v1 [cs.cv] 1 Nov 2018
![arxiv: v1 [cs.cv] 1 Nov 2018](/thumbs/89/100765491.jpg "arxiv: v1 [cs.cv] 1 Nov 2018") arxiv:1811.00386v1 [cs.cv] 1 Nov 2018 Paper accepted at 14th Asian Conf. on Computer Vision (ACCV), Perth, 2018. Continuous-time Intensity Estimation Using Event Cameras Cedric Scheerlinck 1, Nick Barnes
arxiv:1811.00386v1 [cs.cv] 1 Nov 2018 Paper accepted at 14th Asian Conf. on Computer Vision (ACCV), Perth, 2018. Continuous-time Intensity Estimation Using Event Cameras Cedric Scheerlinck 1, Nick Barnes
Multi-Robot Cooperative Localization: A Study of Trade-offs Between Efficiency and Accuracy
 Multi-Robot Cooperative Localization: A Study of Trade-offs Between Efficiency and Accuracy Ioannis M. Rekleitis 1, Gregory Dudek 1, Evangelos E. Milios 2 1 Centre for Intelligent Machines, McGill University,
Multi-Robot Cooperative Localization: A Study of Trade-offs Between Efficiency and Accuracy Ioannis M. Rekleitis 1, Gregory Dudek 1, Evangelos E. Milios 2 1 Centre for Intelligent Machines, McGill University,
Admin Deblurring & Deconvolution Different types of blur
 Admin Assignment 3 due Deblurring & Deconvolution Lecture 10 Last lecture Move to Friday? Projects Come and see me Different types of blur Camera shake User moving hands Scene motion Objects in the scene
Admin Assignment 3 due Deblurring & Deconvolution Lecture 10 Last lecture Move to Friday? Projects Come and see me Different types of blur Camera shake User moving hands Scene motion Objects in the scene
CSE 165: 3D User Interaction. Lecture #14: 3D UI Design
 CSE 165: 3D User Interaction Lecture #14: 3D UI Design 2 Announcements Homework 3 due tomorrow 2pm Monday: midterm discussion Next Thursday: midterm exam 3D UI Design Strategies 3 4 Thus far 3DUI hardware
CSE 165: 3D User Interaction Lecture #14: 3D UI Design 2 Announcements Homework 3 due tomorrow 2pm Monday: midterm discussion Next Thursday: midterm exam 3D UI Design Strategies 3 4 Thus far 3DUI hardware
Persistent Autonomous Exploration, Mapping and Localization. Roxana Mata
 Persistent Autonomous Exploration, Mapping and Localization by Roxana Mata S.B. Massachusetts Institute of Technology (2015) Submitted to the Department of Electrical Engineering and Computer Science in
Persistent Autonomous Exploration, Mapping and Localization by Roxana Mata S.B. Massachusetts Institute of Technology (2015) Submitted to the Department of Electrical Engineering and Computer Science in
Ground Robotics Capability Conference and Exhibit. Mr. George Solhan Office of Naval Research Code March 2010
 Ground Robotics Capability Conference and Exhibit Mr. George Solhan Office of Naval Research Code 30 18 March 2010 1 S&T Focused on Naval Needs Broad FY10 DON S&T Funding = $1,824M Discovery & Invention
Ground Robotics Capability Conference and Exhibit Mr. George Solhan Office of Naval Research Code 30 18 March 2010 1 S&T Focused on Naval Needs Broad FY10 DON S&T Funding = $1,824M Discovery & Invention
Image stitching. Image stitching. Video summarization. Applications of image stitching. Stitching = alignment + blending. geometrical registration
 Image stitching Stitching = alignment + blending Image stitching geometrical registration photometric registration Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2005/3/22 with slides by Richard Szeliski,
Image stitching Stitching = alignment + blending Image stitching geometrical registration photometric registration Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2005/3/22 with slides by Richard Szeliski,
Distribution Statement A (Approved for Public Release, Distribution Unlimited)
") www.darpa.mil 14 Programmatic Approach Focus teams on autonomy by providing capable Government-Furnished Equipment Enables quantitative comparison based exclusively on autonomy, not on mobility Teams add
www.darpa.mil 14 Programmatic Approach Focus teams on autonomy by providing capable Government-Furnished Equipment Enables quantitative comparison based exclusively on autonomy, not on mobility Teams add
NTU Robot PAL 2009 Team Report
 NTU Robot PAL 2009 Team Report Chieh-Chih Wang, Shao-Chen Wang, Hsiao-Chieh Yen, and Chun-Hua Chang The Robot Perception and Learning Laboratory Department of Computer Science and Information Engineering
NTU Robot PAL 2009 Team Report Chieh-Chih Wang, Shao-Chen Wang, Hsiao-Chieh Yen, and Chun-Hua Chang The Robot Perception and Learning Laboratory Department of Computer Science and Information Engineering
A Foveated Visual Tracking Chip
 TP 2.1: A Foveated Visual Tracking Chip Ralph Etienne-Cummings¹, ², Jan Van der Spiegel¹, ³, Paul Mueller¹, Mao-zhu Zhang¹ ¹Corticon Inc., Philadelphia, PA ²Department of Electrical Engineering, Southern
TP 2.1: A Foveated Visual Tracking Chip Ralph Etienne-Cummings¹, ², Jan Van der Spiegel¹, ³, Paul Mueller¹, Mao-zhu Zhang¹ ¹Corticon Inc., Philadelphia, PA ²Department of Electrical Engineering, Southern
Introduction to Mobile Robotics Welcome
 Introduction to Mobile Robotics Welcome Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Today This course Robotics in the past and today 2 Organization Wed 14:00 16:00 Fr 14:00 15:00 lectures, discussions
Introduction to Mobile Robotics Welcome Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Today This course Robotics in the past and today 2 Organization Wed 14:00 16:00 Fr 14:00 15:00 lectures, discussions
Checkerboard Tracker for Camera Calibration. Andrew DeKelaita EE368
 Checkerboard Tracker for Camera Calibration Abstract Andrew DeKelaita EE368 The checkerboard extraction process is an important pre-preprocessing step in camera calibration. This project attempts to implement
Checkerboard Tracker for Camera Calibration Abstract Andrew DeKelaita EE368 The checkerboard extraction process is an important pre-preprocessing step in camera calibration. This project attempts to implement
Experimental Study of Autonomous Target Pursuit with a Micro Fixed Wing Aircraft
 Experimental Study of Autonomous Target Pursuit with a Micro Fixed Wing Aircraft Stanley Ng, Frank Lanke Fu Tarimo, and Mac Schwager Mechanical Engineering Department, Boston University, Boston, MA, 02215
Experimental Study of Autonomous Target Pursuit with a Micro Fixed Wing Aircraft Stanley Ng, Frank Lanke Fu Tarimo, and Mac Schwager Mechanical Engineering Department, Boston University, Boston, MA, 02215
Problem Set 3. Assigned: March 9, 2006 Due: March 23, (Optional) Multiple-Exposure HDR Images
 Multiple-Exposure HDR Images") 6.098/6.882 Computational Photography 1 Problem Set 3 Assigned: March 9, 2006 Due: March 23, 2006 Problem 1 (Optional) Multiple-Exposure HDR Images Even though this problem is optional, we recommend you
6.098/6.882 Computational Photography 1 Problem Set 3 Assigned: March 9, 2006 Due: March 23, 2006 Problem 1 (Optional) Multiple-Exposure HDR Images Even though this problem is optional, we recommend you
Session 2: 10 Year Vision session (11:00-12:20) - Tuesday. Session 3: Poster Highlights A (14:00-15:00) - Tuesday 20 posters (3minutes per poster)
 - Tuesday. Session 3: Poster Highlights A (14:00-15:00) - Tuesday 20 posters (3minutes per poster)") Lessons from Collecting a Million Biometric Samples 109 Expression Robust 3D Face Recognition by Matching Multi-component Local Shape Descriptors on the Nasal and Adjoining Cheek Regions 177 Shared Representation
Lessons from Collecting a Million Biometric Samples 109 Expression Robust 3D Face Recognition by Matching Multi-component Local Shape Descriptors on the Nasal and Adjoining Cheek Regions 177 Shared Representation
Motion Deblurring using Coded Exposure for a Wheeled Mobile Robot Kibaek Park, Seunghak Shin, Hae-Gon Jeon, Joon-Young Lee and In So Kweon
 Motion Deblurring using Coded Exposure for a Wheeled Mobile Robot Kibaek Park, Seunghak Shin, Hae-Gon Jeon, Joon-Young Lee and In So Kweon Korea Advanced Institute of Science and Technology, Daejeon 373-1,
Motion Deblurring using Coded Exposure for a Wheeled Mobile Robot Kibaek Park, Seunghak Shin, Hae-Gon Jeon, Joon-Young Lee and In So Kweon Korea Advanced Institute of Science and Technology, Daejeon 373-1,
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
ANASTASIOS I. MOURIKIS CURRICULUM VITAE
 ANASTASIOS I. MOURIKIS CURRICULUM VITAE TEL.: (951) 827 6051 FAX: (951) 827 2425 E-MAIL: mourikis@ee.ucr.edu WEB: www.ee.ucr.edu/ mourikis MAILING ADDRESS: Dept. of Electrical & Computer Engineering 343
ANASTASIOS I. MOURIKIS CURRICULUM VITAE TEL.: (951) 827 6051 FAX: (951) 827 2425 E-MAIL: mourikis@ee.ucr.edu WEB: www.ee.ucr.edu/ mourikis MAILING ADDRESS: Dept. of Electrical & Computer Engineering 343
Integrated Navigation System
 Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Dynamically Configured Waveform-Agile Sensor Systems
 Dynamically Configured Waveform-Agile Sensor Systems Antonia Papandreou-Suppappola in collaboration with D. Morrell, D. Cochran, S. Sira, A. Chhetri Arizona State University June 27, 2006 Supported by
Dynamically Configured Waveform-Agile Sensor Systems Antonia Papandreou-Suppappola in collaboration with D. Morrell, D. Cochran, S. Sira, A. Chhetri Arizona State University June 27, 2006 Supported by
Content. Robotik: Möglichkeiten, Trends und Visionen. Introduction. Robotics the challenges and technology drivers. Robot Examples
 Robotik: Möglichkeiten, Trends und Visionen Roland Siegwart, ETH Zurich www.asl.ethz.ch Helbling-Abendseminar 18. März 2015, Swissôtel Zürich Roland Siegwart 06.11.2014 2 Content Introduction Robotics
Robotik: Möglichkeiten, Trends und Visionen Roland Siegwart, ETH Zurich www.asl.ethz.ch Helbling-Abendseminar 18. März 2015, Swissôtel Zürich Roland Siegwart 06.11.2014 2 Content Introduction Robotics
Neuromorphic Event-Based Vision Sensors
 Inst. of Neuroinformatics www.ini.uzh.ch Conventional cameras (aka Static vision sensors) deliver a stroboscopic sequence of frames Silicon Retina Technology Tobi Delbruck Inst. of Neuroinformatics, University
Inst. of Neuroinformatics www.ini.uzh.ch Conventional cameras (aka Static vision sensors) deliver a stroboscopic sequence of frames Silicon Retina Technology Tobi Delbruck Inst. of Neuroinformatics, University
Cooperative navigation (part II)
") Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Probabilistic Robotics Course. Robots and Sensors Orazio
 Probabilistic Robotics Course Robots and Sensors Orazio Giorgio Grisetti grisetti@dis.uniroma1.it Dept of Computer Control and Management Engineering Sapienza University of Rome Outline Robot Devices Overview
Probabilistic Robotics Course Robots and Sensors Orazio Giorgio Grisetti grisetti@dis.uniroma1.it Dept of Computer Control and Management Engineering Sapienza University of Rome Outline Robot Devices Overview
Design and Implementation of an Intuitive Gesture Recognition System Using a Hand-held Device
 Design and Implementation of an Intuitive Gesture Recognition System Using a Hand-held Device Hung-Chi Chu 1, Yuan-Chin Cheng 1 1 Department of Information and Communication Engineering, Chaoyang University
Design and Implementation of an Intuitive Gesture Recognition System Using a Hand-held Device Hung-Chi Chu 1, Yuan-Chin Cheng 1 1 Department of Information and Communication Engineering, Chaoyang University
Physics-Based Manipulation in Human Environments
 Vol. 31 No. 4, pp.353 357, 2013 353 Physics-Based Manipulation in Human Environments Mehmet R. Dogar Siddhartha S. Srinivasa The Robotics Institute, School of Computer Science, Carnegie Mellon University
Vol. 31 No. 4, pp.353 357, 2013 353 Physics-Based Manipulation in Human Environments Mehmet R. Dogar Siddhartha S. Srinivasa The Robotics Institute, School of Computer Science, Carnegie Mellon University
High Speed vslam Using System-on-Chip Based Vision. Jörgen Lidholm Mälardalen University Västerås, Sweden
 High Speed vslam Using System-on-Chip Based Vision Jörgen Lidholm Mälardalen University Västerås, Sweden jorgen.lidholm@mdh.se February 28, 2007 1 The ChipVision Project Within the ChipVision project we
High Speed vslam Using System-on-Chip Based Vision Jörgen Lidholm Mälardalen University Västerås, Sweden jorgen.lidholm@mdh.se February 28, 2007 1 The ChipVision Project Within the ChipVision project we
A TRUSTED AUTOPILOT ARCHITECTURE FOR GPS-DENIED AND EXPERIMENTAL UAV OPERATIONS
 A TRUSTED AUTOPILOT ARCHITECTURE FOR GPS-DENIED AND EXPERIMENTAL UAV OPERATIONS Anthony Spears *, Lee Hunt, Mujahid Abdulrahim, Al Sanders, Jason Grzywna ** INTRODUCTION Unmanned and autonomous systems
A TRUSTED AUTOPILOT ARCHITECTURE FOR GPS-DENIED AND EXPERIMENTAL UAV OPERATIONS Anthony Spears *, Lee Hunt, Mujahid Abdulrahim, Al Sanders, Jason Grzywna ** INTRODUCTION Unmanned and autonomous systems
NavShoe Pedestrian Inertial Navigation Technology Brief
 NavShoe Pedestrian Inertial Navigation Technology Brief Eric Foxlin Aug. 8, 2006 WPI Workshop on Precision Indoor Personnel Location and Tracking for Emergency Responders The Problem GPS doesn t work indoors
NavShoe Pedestrian Inertial Navigation Technology Brief Eric Foxlin Aug. 8, 2006 WPI Workshop on Precision Indoor Personnel Location and Tracking for Emergency Responders The Problem GPS doesn t work indoors
CS 378: Autonomous Intelligent Robotics. Instructor: Jivko Sinapov
 CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Semester Schedule C++ and Robot Operating System (ROS) Learning to use our robots Computational
CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Semester Schedule C++ and Robot Operating System (ROS) Learning to use our robots Computational
SnakeSIM: a Snake Robot Simulation Framework for Perception-Driven Obstacle-Aided Locomotion
 : a Snake Robot Simulation Framework for Perception-Driven Obstacle-Aided Locomotion Filippo Sanfilippo 1, Øyvind Stavdahl 1 and Pål Liljebäck 1 1 Dept. of Engineering Cybernetics, Norwegian University
: a Snake Robot Simulation Framework for Perception-Driven Obstacle-Aided Locomotion Filippo Sanfilippo 1, Øyvind Stavdahl 1 and Pål Liljebäck 1 1 Dept. of Engineering Cybernetics, Norwegian University
As a first approach, the details of how to implement a common nonparametric
 Chapter 3 3D EKF-SLAM Delayed initialization As a first approach, the details of how to implement a common nonparametric Bayesian filter for the simultaneous localization and mapping (SLAM) problem is
Chapter 3 3D EKF-SLAM Delayed initialization As a first approach, the details of how to implement a common nonparametric Bayesian filter for the simultaneous localization and mapping (SLAM) problem is
Sensor Fusion for Navigation in Degraded Environements
 Sensor Fusion for Navigation in Degraded Environements David M. Bevly Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 GPS and Vehicle Dynamics Lab Auburn University
Sensor Fusion for Navigation in Degraded Environements David M. Bevly Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 GPS and Vehicle Dynamics Lab Auburn University
Randomized Motion Planning for Groups of Nonholonomic Robots
 Randomized Motion Planning for Groups of Nonholonomic Robots Christopher M Clark chrisc@sun-valleystanfordedu Stephen Rock rock@sun-valleystanfordedu Department of Aeronautics & Astronautics Stanford University
Randomized Motion Planning for Groups of Nonholonomic Robots Christopher M Clark chrisc@sun-valleystanfordedu Stephen Rock rock@sun-valleystanfordedu Department of Aeronautics & Astronautics Stanford University
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Pedestrian Navigation System Using. Shoe-mounted INS. By Yan Li. A thesis submitted for the degree of Master of Engineering (Research)
") Pedestrian Navigation System Using Shoe-mounted INS By Yan Li A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information Technology University of Technology,
Pedestrian Navigation System Using Shoe-mounted INS By Yan Li A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information Technology University of Technology,
Vishnu Nath. Usage of computer vision and humanoid robotics to create autonomous robots. (Ximea Currera RL04C Camera Kit)
") Vishnu Nath Usage of computer vision and humanoid robotics to create autonomous robots (Ximea Currera RL04C Camera Kit) Acknowledgements Firstly, I would like to thank Ivan Klimkovic of Ximea Corporation,
Vishnu Nath Usage of computer vision and humanoid robotics to create autonomous robots (Ximea Currera RL04C Camera Kit) Acknowledgements Firstly, I would like to thank Ivan Klimkovic of Ximea Corporation,
Artificial Intelligence: Implications for Autonomous Weapons. Stuart Russell University of California, Berkeley
 Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline Remit [etc] AI in the context of autonomous weapons State of the Art Likely future
Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline Remit [etc] AI in the context of autonomous weapons State of the Art Likely future
Wi-Fi Fingerprinting through Active Learning using Smartphones
 Wi-Fi Fingerprinting through Active Learning using Smartphones Le T. Nguyen Carnegie Mellon University Moffet Field, CA, USA le.nguyen@sv.cmu.edu Joy Zhang Carnegie Mellon University Moffet Field, CA,
Wi-Fi Fingerprinting through Active Learning using Smartphones Le T. Nguyen Carnegie Mellon University Moffet Field, CA, USA le.nguyen@sv.cmu.edu Joy Zhang Carnegie Mellon University Moffet Field, CA,
Outlier-Robust Estimation of GPS Satellite Clock Offsets
 Outlier-Robust Estimation of GPS Satellite Clock Offsets Simo Martikainen, Robert Piche and Simo Ali-Löytty Tampere University of Technology. Tampere, Finland Email: simo.martikainen@tut.fi Abstract A
Outlier-Robust Estimation of GPS Satellite Clock Offsets Simo Martikainen, Robert Piche and Simo Ali-Löytty Tampere University of Technology. Tampere, Finland Email: simo.martikainen@tut.fi Abstract A
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Collaborative Multi-Robot Localization
 Proc. of the German Conference on Artificial Intelligence (KI), Germany Collaborative Multi-Robot Localization Dieter Fox y, Wolfram Burgard z, Hannes Kruppa yy, Sebastian Thrun y y School of Computer
Proc. of the German Conference on Artificial Intelligence (KI), Germany Collaborative Multi-Robot Localization Dieter Fox y, Wolfram Burgard z, Hannes Kruppa yy, Sebastian Thrun y y School of Computer
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
CS123. Programming Your Personal Robot. Part 3: Reasoning Under Uncertainty
 CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty This Week (Week 2 of Part 3) Part 3-3 Basic Introduction of Motion Planning Several Common Motion Planning Methods Plan Execution
CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty This Week (Week 2 of Part 3) Part 3-3 Basic Introduction of Motion Planning Several Common Motion Planning Methods Plan Execution
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ULTRALIGHT RADAR FOR SMALL AND MICRO-UAV NAVIGATION
 ULTRALIGHT RADAR FOR SMALL AND MICRO-UAV NAVIGATION A. F. Scannapieco a *, A. Renga a, G. Fasano a, A. Moccia a a DII - Department of Industrial Engineering, University of Naples Federico II, Piazzale
ULTRALIGHT RADAR FOR SMALL AND MICRO-UAV NAVIGATION A. F. Scannapieco a *, A. Renga a, G. Fasano a, A. Moccia a a DII - Department of Industrial Engineering, University of Naples Federico II, Piazzale
Cooperative localization (part I) Jouni Rantakokko
 Jouni Rantakokko") Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Ubiquitous Positioning: A Pipe Dream or Reality?
 Ubiquitous Positioning: A Pipe Dream or Reality? Professor Terry Moore The University of What is Ubiquitous Positioning? Multi-, low-cost and robust positioning Based on single or multiple users Different
Ubiquitous Positioning: A Pipe Dream or Reality? Professor Terry Moore The University of What is Ubiquitous Positioning? Multi-, low-cost and robust positioning Based on single or multiple users Different
Sponsored by. Nisarg Kothari Carnegie Mellon University April 26, 2011
 Sponsored by Nisarg Kothari Carnegie Mellon University April 26, 2011 Motivation Why indoor localization? Navigating malls, airports, office buildings Museum tours, context aware apps Augmented reality
Sponsored by Nisarg Kothari Carnegie Mellon University April 26, 2011 Motivation Why indoor localization? Navigating malls, airports, office buildings Museum tours, context aware apps Augmented reality
GESTURE RECOGNITION WITH 3D CNNS
 April 4-7, 2016 Silicon Valley GESTURE RECOGNITION WITH 3D CNNS Pavlo Molchanov Xiaodong Yang Shalini Gupta Kihwan Kim Stephen Tyree Jan Kautz 4/6/2016 Motivation AGENDA Problem statement Selecting the
April 4-7, 2016 Silicon Valley GESTURE RECOGNITION WITH 3D CNNS Pavlo Molchanov Xiaodong Yang Shalini Gupta Kihwan Kim Stephen Tyree Jan Kautz 4/6/2016 Motivation AGENDA Problem statement Selecting the
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures
 A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
What is Robot Mapping? Robot Mapping. Introduction to Robot Mapping. Related Terms. What is SLAM? ! Robot a device, that moves through the environment
 Robot Mapping Introduction to Robot Mapping What is Robot Mapping?! Robot a device, that moves through the environment! Mapping modeling the environment Cyrill Stachniss 1 2 Related Terms State Estimation
Robot Mapping Introduction to Robot Mapping What is Robot Mapping?! Robot a device, that moves through the environment! Mapping modeling the environment Cyrill Stachniss 1 2 Related Terms State Estimation
Applications & Theory
 Applications & Theory Azadeh Kushki azadeh.kushki@ieee.org Professor K N Plataniotis Professor K.N. Plataniotis Professor A.N. Venetsanopoulos Presentation Outline 2 Part I: The case for WLAN positioning
Applications & Theory Azadeh Kushki azadeh.kushki@ieee.org Professor K N Plataniotis Professor K.N. Plataniotis Professor A.N. Venetsanopoulos Presentation Outline 2 Part I: The case for WLAN positioning
Indoor navigation with smartphones
 Indoor navigation with smartphones REinEU2016 Conference September 22 2016 PAVEL DAVIDSON Outline Indoor navigation system for smartphone: goals and requirements WiFi based positioning Application of BLE
Indoor navigation with smartphones REinEU2016 Conference September 22 2016 PAVEL DAVIDSON Outline Indoor navigation system for smartphone: goals and requirements WiFi based positioning Application of BLE
TurtleBot2&ROS - Learning TB2
 TurtleBot2&ROS - Learning TB2 Ing. Zdeněk Materna Department of Computer Graphics and Multimedia Fakulta informačních technologií VUT v Brně TurtleBot2&ROS - Learning TB2 1 / 22 Presentation outline Introduction
TurtleBot2&ROS - Learning TB2 Ing. Zdeněk Materna Department of Computer Graphics and Multimedia Fakulta informačních technologií VUT v Brně TurtleBot2&ROS - Learning TB2 1 / 22 Presentation outline Introduction
Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface
 Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface Kei Okada 1, Yasuyuki Kino 1, Fumio Kanehiro 2, Yasuo Kuniyoshi 1, Masayuki Inaba 1, Hirochika Inoue 1 1
Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface Kei Okada 1, Yasuyuki Kino 1, Fumio Kanehiro 2, Yasuo Kuniyoshi 1, Masayuki Inaba 1, Hirochika Inoue 1 1
Secure and Intelligent Mobile Crowd Sensing
 Secure and Intelligent Mobile Crowd Sensing Chi (Harold) Liu Professor and Vice Dean School of Computer Science Beijing Institute of Technology, China June 19, 2018 Marist College Agenda Introduction QoI
Secure and Intelligent Mobile Crowd Sensing Chi (Harold) Liu Professor and Vice Dean School of Computer Science Beijing Institute of Technology, China June 19, 2018 Marist College Agenda Introduction QoI
Detection of Compound Structures in Very High Spatial Resolution Images
 Detection of Compound Structures in Very High Spatial Resolution Images Selim Aksoy Department of Computer Engineering Bilkent University Bilkent, 06800, Ankara, Turkey saksoy@cs.bilkent.edu.tr Joint work
Detection of Compound Structures in Very High Spatial Resolution Images Selim Aksoy Department of Computer Engineering Bilkent University Bilkent, 06800, Ankara, Turkey saksoy@cs.bilkent.edu.tr Joint work
Connectivity-based Localization in Robot Networks
 Connectivity-based Localization in Robot Networks Tobias Jung, Mazda Ahmadi, Peter Stone Department of Computer Sciences University of Texas at Austin {tjung,mazda,pstone}@cs.utexas.edu Summary: Localization
Connectivity-based Localization in Robot Networks Tobias Jung, Mazda Ahmadi, Peter Stone Department of Computer Sciences University of Texas at Austin {tjung,mazda,pstone}@cs.utexas.edu Summary: Localization
Interaction rule learning with a human partner based on an imitation faculty with a simple visuo-motor mapping
 Robotics and Autonomous Systems 54 (2006) 414 418 www.elsevier.com/locate/robot Interaction rule learning with a human partner based on an imitation faculty with a simple visuo-motor mapping Masaki Ogino
Robotics and Autonomous Systems 54 (2006) 414 418 www.elsevier.com/locate/robot Interaction rule learning with a human partner based on an imitation faculty with a simple visuo-motor mapping Masaki Ogino
Robot Mapping. Introduction to Robot Mapping. Cyrill Stachniss
 Robot Mapping Introduction to Robot Mapping Cyrill Stachniss 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms State Estimation
Robot Mapping Introduction to Robot Mapping Cyrill Stachniss 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms State Estimation
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Visual compass for the NIFTi robot
 CENTER FOR MACHINE PERCEPTION CZECH TECHNICAL UNIVERSITY IN PRAGUE Visual compass for the NIFTi robot Tomáš Nouza nouzato1@fel.cvut.cz June 27, 2013 TECHNICAL REPORT Available at https://cw.felk.cvut.cz/doku.php/misc/projects/nifti/sw/start/visual
CENTER FOR MACHINE PERCEPTION CZECH TECHNICAL UNIVERSITY IN PRAGUE Visual compass for the NIFTi robot Tomáš Nouza nouzato1@fel.cvut.cz June 27, 2013 TECHNICAL REPORT Available at https://cw.felk.cvut.cz/doku.php/misc/projects/nifti/sw/start/visual