Roboti komponentide juhtimiseks kasutatakse elektrit. Elektroonika. Elektroonika jaguneb. Passiivelemendid Pooljuhid Aktiivelemendid
|
|
|
- Jeremy Jackson
- 5 years ago
- Views:
Transcription


1 Elektroonika

2 Roboti komponentide juhtimiseks kasutatakse elektrit. Elektroonika Elektroonika jaguneb Passiivelemendid Pooljuhid Aktiivelemendid 2
 Voolu")




3 Takisti (Oom) Voolu ja pinget piirav element Võib olla ka muutuva takistusega Fototakisti, termotakisti Potentsiomeeter Passiivelemendid 3
4 Takisti värvikood 4
")



5 Kondensaator (Farad) Mahtuvuslik element (nagu pisike aku) Kasutatakse peamiselt toite silumiseks Passiivelemendid 5


6 Pooljuhid juhivad nagu nimi ütleb voolu vaid ühes suunas Diood Lihtne element, juhib voolu vaid ühes suunas Sobib nt tagurpidi pinge kaitseks Valgusdiood Muundab elektrienergia valgusenergiaks Kasutatakse indikaatoritena Pooljuhid 6

 Lülitatavad elemendid")
")
7 Lülitatavad pooljuhid Transistor (NPN, PNP): On kolme väljaviiguga pooljuhtseadis elektriahelate lülitamiseks ja elektrisignaalide võimendamiseks. Väljatransistor (N-Fet, P-Fet) Lülitatavad elemendid seadmete juhtimiseks Võimendavad elemendid (madala vooluga võimalik lülitada suure vooluga seadmeid) Aktiivkomponendid 7



8 Kogum aktiiv- ja passiivkomponentidest ühes korpuses mingi kindla ülesande lahendamiseks Kiibid Programmeeritavad kiibid Loogikakiibid Võimenduskiibid Mäluelemendid = 8
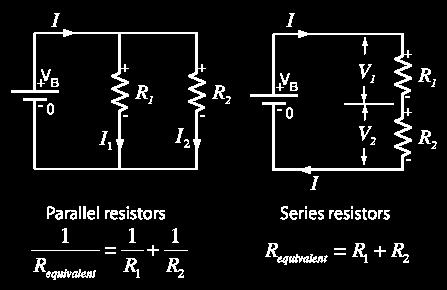
9 Oomi seadust kasutatakse elektrijuhile rakendatud pinge ja juhti läbiva voolutugevuse vahelise sõltuvuse iseloomustamiseks. Voolutugevus juhis on võrdeline juhi otstele rakendatud pingega ja pöördvõrdeline juhi takistusega. Oomi seadus I = U / R 9
10 Oomi seadus 10
11 Voolu mõõdame jadamisi tarbijaga, pinget aga paralleelselt. Oomi seadus Takisti väärtus, kui: I=10mA U=5V 11
12 Pingejagur on elektriahel, mille väljundpinge moodustab osa sisendpingest. Väljundpinge suurus sõltub elektriahela moodustavate takistite takistuse suhtest. U 2 = U 1 (R 2 / (R 1 + R 2 )) Valem tuleneb Ohmi seadusest, mille järgi: Pingejagur I = U 1 / (R 1 + R 2 ) ning: U 2 = I R 2 vider.asp 12
13 Valgusdioodi töövoolu on vaja piirata, et kaitsta seda läbi põlemise eest LED takisti arvutamine 13
14 Valgusdioodi töövoolu on vaja piirata, et kaitsta seda läbi põlemise eest LED takisti arvutamine R = U r / I f = (U in - U f ) / I f R on takisti takistus. U r on pingelang takistil. U in on toitepinge. U f on LED-i päripinge. I f on LED-i voolutugevus. 14

15 LED takisti arvutamine R = U r / I f = (U in - U f ) / I f R on takisti takistus. U r on pingelang takistil. U in on toitepinge. U f on LED-i päripinge. I f on LED-i voolutugevus. 15
16 Arvutada takisti takistus, kui LED ühendatakse 12 V pingega, LED-i päripinge on 3 V ja pärivool on 20 ma. I f = 20 ma = 0,02 A R = (12-3) / 0,02 = 450 Ω P r = (12-3) 0,02 = 0,18 W Arvutusnäide Koostage LED skeem. 16


17 Patareid Lihtsad, odavad vooluallikad Akud Taaslaetavad, väga palju erinevaid tehnoloogiaid Kütused Põlemis / keemilise reaktsiooniga saadav energia muundatakse elektrienergiaks Adapterid Vooluvõrgust saadav energia, mis alaldatakse vajalikuks pingeks kasutades trafot või toiteblokki Toiteallikad 17


18 Pliiakud Odavad ja lihtsad akud Kasutatakse peamiselt autodes ja UPSides Madal energiatihedus Nikkelakud Enamlevinud akud koduelektroonikas (NiMH, NiCd) Suhteliselt hea mahtuvusega ning hinnaga Ohutud Iseeneslik tühjenemine Mäluefekt Akud 18


19 Liitiumakud Väga hea energiatihedusega Võimaldab väga suuri voolusid Kardavad ülelaadimist ja liiga tühjaks laadimist, lühist, äärmuslikke temperatuure Akud 19
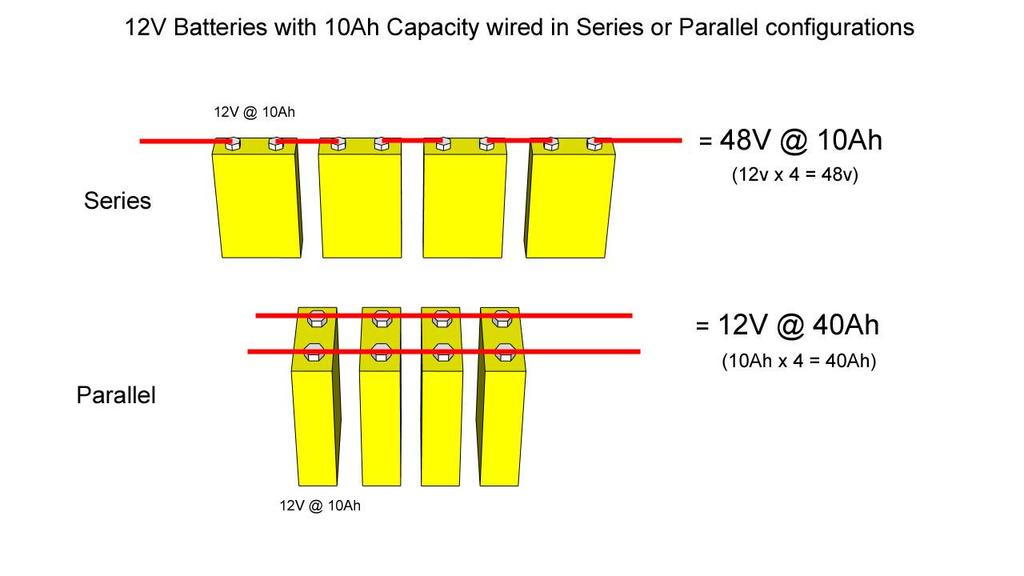
20 Akude ühendamine 20


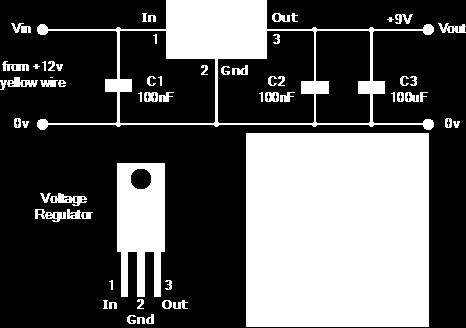
21 Stabiilse pinge saamiseks kasutame pingeregulaatoreid Pingeregulaatorid 21

22 Seade, mis muundab mingi füüsikalise suuruse elektrisignaaliks. Ümbritseva keskkonna tajumiseks Mida rohkem andureid, seda täpsemini oskab robot oma käitumist planeerida Jagunevad Analoogandurid Andurid Digitaalandurid 22


23 Lihtsalt kasutatavad andurid, 2 olekut: On või Ei ole Lülitid, Koodrid, diskreetoptika Digitaalandurid 23
24 Selleks, et analoog andureid kasutada on vaja analoogsignaali digitaalseks muundada Väljundiks on muutuv pinge Tüüpilised andurid Kaugusandurid Keskkonna andurid Analoogandurid 24



25 Andurid, millesse on sisse ehitatud mõõteloogika Juhitavad üle andmesiini UART, SPI, TWI, USB, PWM Targad andurid 25

26 Ultraheli kaugusandur - Lai nägemisväli - Odav - Suhteliselt täpne - Ei sõltu materjali värvist HC-SR04 26

 ; 6/8 kanalit")
27 Infrapuna jooneandur 8 optopaariga ja juhitava LED olekuga Mõõtekaugus 3mm maapinnast 9.5mm anduritevaheline kaugus Analoogväljund (mõõdetav ka digitaalsisendiga) ; 6/8 kanalit Jooneandur QR 27
, pöördemoment Jagunevad: Alalisvoolumootor Vahelduvvoolu mootor Servo mootor Samm-mootor Mootorid")
28 Elektrienergia muundamine mehaaniliseks liikumiseks Olulised parameetrid: Voolu eripära ja tarve, mõõtmed, kinnitus, juhtimise keerukus, pöörlemiskiirus (rpm), pöördemoment Jagunevad: Alalisvoolumootor Vahelduvvoolu mootor Servo mootor Samm-mootor Mootorid 28


29 Töötab alalisvoolul Kiirus lihtsasti reguleeritav pingega Suur pöörlemiskiirus Alalisvoolu mootor Kasutamiseks vaja lisada reduktor Kaotad kiiruses, võidad jõus 29
30 Kiiruse reguleerimine pingega PWM Mootorite juhtimine Pulsilaius-modulatsioon (PWM) on signaali tüüp mille sagedus ja ühtlasi ka perioodi pikkus on konstantne (enamasti) kuid mõlema poolperioodi pikkus on muutuv. PWM signaale kasutatakse elektromehaaniliste, optiliste, jms. seadmete juhtimiseks. Näiteks mudelismist tuntud servomootorite PWM signaal on 50Hz sagedusega ja 1ms kuni 2ms pikkuse kõrge poolperioodiga. 30
31 Suuna muutmine toite ümber lülitamisega H-sild Mootorite juhtimine 31

32 Pisi-Xbee 5 e5 32
33 ATxmega32A4 (3,3V loogika) 8 analoogsisendit 8 digitaalset I/O viiku Maksimaalne lubatud koormus 3.3V ahelas on 500mA Töötab 2S LiPo aku peal (max ~8,4V) H-silla kiip DRV8848 Kiirendus - güro LSM330DLC XRF raadiomoodul Pisi-Xbee 5 33

34 Takistid 34
35 Kondensaator id 35
36 Induktiivpool 36

37 Connector, Pin header 37
38 Transistorid 38

39 Dioodid 39
40 Integraalskeem 40
41 Toide, maa 41
42 Valige sobivad andurid enda robotile. Ülesanne 42
43 Argo Kasemaa. Elektroonika komponendid, graalskeemide_korpused.html Soovituslik kirjandus 43

44 Marianne Nugis tel
Arduino stardikomplekti õppematerjalid
 TARTU ÜLIKOOL Arvutiteaduse instituut informaatika õppekava Selena Lubi Arduino stardikomplekti õppematerjalid Bakalaureusetöö (9 EAP) Juhendajad: Alo Peets, Taavi Duvin, Anne Villems Tartu 2016 Arduino
TARTU ÜLIKOOL Arvutiteaduse instituut informaatika õppekava Selena Lubi Arduino stardikomplekti õppematerjalid Bakalaureusetöö (9 EAP) Juhendajad: Alo Peets, Taavi Duvin, Anne Villems Tartu 2016 Arduino
1. SAGEDUSMODULAATOR. Raadiotehnika laboratoorium RAADIO- JA SIDETEHNIKA INSTITUUT
 1. SAGEDUSMODULAATOR Raadiotehnika laboratoorium RAADIO- JA SIDETEHNIKA INSTITUUT Tallinn 2015 Infoedastusseadmete IRO 0050 laboratoorne töö Sagedusmodulaator Valminud Eesti Infotehnoloogia Sihtasutuse
1. SAGEDUSMODULAATOR Raadiotehnika laboratoorium RAADIO- JA SIDETEHNIKA INSTITUUT Tallinn 2015 Infoedastusseadmete IRO 0050 laboratoorne töö Sagedusmodulaator Valminud Eesti Infotehnoloogia Sihtasutuse
Arvude edastamine raadiosides. 1. Numbrite edastamine Numbrite edastamisel kasutatakse järgmist hääldust, rõhutades allajoonitud silpi.
 Majandus- ja kommunikatsiooniministri 8.03.2011. a määruse nr 20 Lennunduse raadioside reeglid lisa 2 Arvude edastamine raadiosides 1. Numbrite edastamine Numbrite edastamisel kasutatakse järgmist hääldust,
Majandus- ja kommunikatsiooniministri 8.03.2011. a määruse nr 20 Lennunduse raadioside reeglid lisa 2 Arvude edastamine raadiosides 1. Numbrite edastamine Numbrite edastamisel kasutatakse järgmist hääldust,
Algoritmide koostamise strateegiad
 Algoritmide koostamise strateegiad Algoritmide koostamise strateegiad (algorithmic paradigmas) on üldised põhimõtted sellest, kuidas konstrueerida tulemuslikke algoritme probleemide lahendamiseks. Miks
Algoritmide koostamise strateegiad Algoritmide koostamise strateegiad (algorithmic paradigmas) on üldised põhimõtted sellest, kuidas konstrueerida tulemuslikke algoritme probleemide lahendamiseks. Miks
IRZ0190 Kanalikodeerimine telekommunikatsioonis. Julia Berdnikova julia.berdnikova [ät] ttu.ee Sander Ulp sander.ulp [ät] ttu.ee
![IRZ0190 Kanalikodeerimine telekommunikatsioonis. Julia Berdnikova julia.berdnikova [ät] ttu.ee Sander Ulp sander.ulp [ät] ttu.ee](/thumbs/75/72452435.jpg "IRZ0190 Kanalikodeerimine telekommunikatsioonis. Julia Berdnikova julia.berdnikova [ät] ttu.ee Sander Ulp sander.ulp [ät] ttu.ee") IRZ0190 Kanalikodeerimine telekommunikatsioonis Julia Berdnikova julia.berdnikova [ät] ttu.ee Sander Ulp sander.ulp [ät] ttu.ee 1 IRZ0190 Kanalikodeerimine telekommunikatsioonis Nädalatunnid: 2L+1P+1H
IRZ0190 Kanalikodeerimine telekommunikatsioonis Julia Berdnikova julia.berdnikova [ät] ttu.ee Sander Ulp sander.ulp [ät] ttu.ee 1 IRZ0190 Kanalikodeerimine telekommunikatsioonis Nädalatunnid: 2L+1P+1H
SIDE (IRT 3930) Loeng 3/2012 Signaalid sidesüsteemis Teema - signaalid. Avo Ots. telekommunikatsiooni õppetool,
 Loeng 3/2012 Signaalid sidesüsteemis Teema - signaalid. Avo Ots. telekommunikatsiooni õppetool,") SIDE (IRT 3930) Loeng 3/2012 Signaalid sidesüsteemis Teema - signaalid Avo Ots telekommunikatsiooni õppetool, TTÜ raadio- ja sidetehnika inst. avo.ots@ttu.ee Signaalid 81 Süsteemi näide input Microphone
SIDE (IRT 3930) Loeng 3/2012 Signaalid sidesüsteemis Teema - signaalid Avo Ots telekommunikatsiooni õppetool, TTÜ raadio- ja sidetehnika inst. avo.ots@ttu.ee Signaalid 81 Süsteemi näide input Microphone
Presenter SNP6000. Register your product and get support at ET Kasutusjuhend
 Register your product and get support at www.philips.com/welcome Presenter SNP6000 ET Kasutusjuhend 1 a b c d e 2 3 4 Federal Communication Commission Interference Statement This equipment has been tested
Register your product and get support at www.philips.com/welcome Presenter SNP6000 ET Kasutusjuhend 1 a b c d e 2 3 4 Federal Communication Commission Interference Statement This equipment has been tested
LEGO Mindstorms EV3 robotiehitus Design Engineering Projects
 LEGO Mindstorms EV3 robotiehitus Design Engineering Projects Jaanuar 2015, Lasteveeb OÜ Käesolev õppevahend on litsentseeritud Creative Commons 3.0 Eesti litsentsiga (autorile viitamine, mitteäriline eesmärk,
LEGO Mindstorms EV3 robotiehitus Design Engineering Projects Jaanuar 2015, Lasteveeb OÜ Käesolev õppevahend on litsentseeritud Creative Commons 3.0 Eesti litsentsiga (autorile viitamine, mitteäriline eesmärk,
Henri Lillmaa ESTCUBE-1 PÄIKESEELEMENDI SIMULAATORI ARENDUS JA TESTIMINE
 TARTU ÜLIKOOL LOODUS- JA TEHNOLOOGIATEADUSKOND Arvutitehnika eriala Henri Lillmaa ESTCUBE-1 PÄIKESEELEMENDI SIMULAATORI ARENDUS JA TESTIMINE Bakalaureusetöö (12 EAP) Juhendaja: M.Sc. Mihkel Pajusalu Tartu
TARTU ÜLIKOOL LOODUS- JA TEHNOLOOGIATEADUSKOND Arvutitehnika eriala Henri Lillmaa ESTCUBE-1 PÄIKESEELEMENDI SIMULAATORI ARENDUS JA TESTIMINE Bakalaureusetöö (12 EAP) Juhendaja: M.Sc. Mihkel Pajusalu Tartu
GPS MOODULI REALISATSIOON JA ANALÜÜS SIRFSTAR IV KIIBI BAASIL Bakalaureuse lõputöö
 TALLINNA TEHNIKAÜLIKOOL Infotehnoloogia teaduskond Thomas Johann Seebecki elektroonikainstituut Siduselektroonika teaduslaboratoorium Kristjan Lužkov GPS MOODULI REALISATSIOON JA ANALÜÜS SIRFSTAR IV KIIBI
TALLINNA TEHNIKAÜLIKOOL Infotehnoloogia teaduskond Thomas Johann Seebecki elektroonikainstituut Siduselektroonika teaduslaboratoorium Kristjan Lužkov GPS MOODULI REALISATSIOON JA ANALÜÜS SIRFSTAR IV KIIBI
Survey Pro 4.8 GPS/GNSS juhend
 GPS/GNSS liikuvjaama mõõtmise alustamine Select RTK Rover: vali liikuvjaama seade. Select Networks: vali kasutatav püsijaam või võrk (eelnevalt seadistatud). Ühenda GNSS seadme ja võrguga. Antenna Type:
GPS/GNSS liikuvjaama mõõtmise alustamine Select RTK Rover: vali liikuvjaama seade. Select Networks: vali kasutatav püsijaam või võrk (eelnevalt seadistatud). Ühenda GNSS seadme ja võrguga. Antenna Type:
ÕHU CO2 SISALDUSE MÕÕTESEADE
 TALLINNA TEHNIKAÜLIKOOL Informaatikateaduskond Thomas Johann Seebecki elektroonikainstituut Siduselektroonika õppetool ÕHU CO2 SISALDUSE MÕÕTESEADE Bakalaureusetöö Üliõpilane: Denry Aron Üliõpilaskood:
TALLINNA TEHNIKAÜLIKOOL Informaatikateaduskond Thomas Johann Seebecki elektroonikainstituut Siduselektroonika õppetool ÕHU CO2 SISALDUSE MÕÕTESEADE Bakalaureusetöö Üliõpilane: Denry Aron Üliõpilaskood:
Control a Robot via VEP Using Emotiv EPOC
 UNIVERSITY OF TARTU FACULTY OF MATHEMATICS AND COMPUTER SCIENCE Institute of Computer Science Computer Science Curriculum Anti Ingel Control a Robot via VEP Using Emotiv EPOC Bachelor s Thesis (9 ECTS)
UNIVERSITY OF TARTU FACULTY OF MATHEMATICS AND COMPUTER SCIENCE Institute of Computer Science Computer Science Curriculum Anti Ingel Control a Robot via VEP Using Emotiv EPOC Bachelor s Thesis (9 ECTS)
3.3V regulator. JA H-bridge. Doc: page 1 of 7
 Cerebot Reference Manual Revision: February 9, 2009 Note: This document applies to REV B-E of the board. www.digilentinc.com 215 E Main Suite D Pullman, WA 99163 (509) 334 6306 Voice and Fax Overview The
Cerebot Reference Manual Revision: February 9, 2009 Note: This document applies to REV B-E of the board. www.digilentinc.com 215 E Main Suite D Pullman, WA 99163 (509) 334 6306 Voice and Fax Overview The
Project Name: SpyBot
 EEL 4924 Electrical Engineering Design (Senior Design) Final Report April 23, 2013 Project Name: SpyBot Team Members: Name: Josh Kurland Name: Parker Karaus Email: joshkrlnd@gmail.com Email: pbkaraus@ufl.edu
EEL 4924 Electrical Engineering Design (Senior Design) Final Report April 23, 2013 Project Name: SpyBot Team Members: Name: Josh Kurland Name: Parker Karaus Email: joshkrlnd@gmail.com Email: pbkaraus@ufl.edu
EESTI MAAÜLIKOOL EMÜ Tartu Tehnikakolledž
 EESTI MAAÜLIKOOL EMÜ Tartu Tehnikakolledž Alo Veenpere ELEKTRISEADMETE KAUGJUHTIMISSÜSTEEMI PROJEKT REMOTE CONTROL PROJECT FOR ELECTRICAL APPLIANCES Rakenduskõrghariduse lõputöö tehnotroonika erialal Tartu
EESTI MAAÜLIKOOL EMÜ Tartu Tehnikakolledž Alo Veenpere ELEKTRISEADMETE KAUGJUHTIMISSÜSTEEMI PROJEKT REMOTE CONTROL PROJECT FOR ELECTRICAL APPLIANCES Rakenduskõrghariduse lõputöö tehnotroonika erialal Tartu
Kodu süda ja mõistus Energiasäästust hoolib
 Kodu süda ja mõistus Energiasäästust hoolib... Aivar Kukk bold Ehitusautomaatika müügijuht CPS BT Industry Siemens OY Eesti filiaal Väike-Paala 1 11415 Tallinn aivar.kukk@siemens.com www.siemens.ee 1 Building
Kodu süda ja mõistus Energiasäästust hoolib... Aivar Kukk bold Ehitusautomaatika müügijuht CPS BT Industry Siemens OY Eesti filiaal Väike-Paala 1 11415 Tallinn aivar.kukk@siemens.com www.siemens.ee 1 Building
Roman Kulašenkov. Panoraamröntgenseadmete tunnussuurused ja patsiendidoos
 TARTU ÜLIKOOL LOODUS- JA TÄPPISTEADUSTE VALDKOND Füüsika Instituut Roman Kulašenkov Panoraamröntgenseadmete tunnussuurused ja patsiendidoos Füüsika õppekava bakalaureusetöö (12 EAP) Juhendaja(d): Kalle
TARTU ÜLIKOOL LOODUS- JA TÄPPISTEADUSTE VALDKOND Füüsika Instituut Roman Kulašenkov Panoraamröntgenseadmete tunnussuurused ja patsiendidoos Füüsika õppekava bakalaureusetöö (12 EAP) Juhendaja(d): Kalle
SIDE (IRT 3930) Loeng 12/2011 Mobiilne lairiba Teema - teenused. Avo Ots. telekommunikatsiooni õppetool,
 Loeng 12/2011 Mobiilne lairiba Teema - teenused. Avo Ots. telekommunikatsiooni õppetool,") SIDE (IRT 3930) Loeng 12/2011 Mobiilne lairiba Teema - teenused Avo Ots telekommunikatsiooni õppetool, TTÜ raadio- ja sidetehnika inst. avots@lr.ttu.ee Teenused 441 UMTS ootused Parema kvaliteediga teenused
SIDE (IRT 3930) Loeng 12/2011 Mobiilne lairiba Teema - teenused Avo Ots telekommunikatsiooni õppetool, TTÜ raadio- ja sidetehnika inst. avots@lr.ttu.ee Teenused 441 UMTS ootused Parema kvaliteediga teenused
The Information contained herein is subject to change without notice. Revisions may be issued regarding changes and/or additions.
 BBB Rover Cape TM Gumstix, Inc. shall have no liability of any kind, express or implied, arising out of the use of the Information in this document, including direct, indirect, special or consequential
BBB Rover Cape TM Gumstix, Inc. shall have no liability of any kind, express or implied, arising out of the use of the Information in this document, including direct, indirect, special or consequential
Type Ordering Code Package TAE 4453 G Q67000-A2152 P-DSO-14-1 (SMD) TAF 4453 G Q67000-A2213 P-DSO-14-1 (SMD)
 TAF 4453 G Q67000-A2213 P-DSO-14-1 (SMD)") Quad PNP-Operational Amplifier TAE 4453 Bipolar IC Features Supply voltage range between 3 and 36 Low current consumption, 1.6 ma typ. Extremely large control range Low output saturation voltage, almost
Quad PNP-Operational Amplifier TAE 4453 Bipolar IC Features Supply voltage range between 3 and 36 Low current consumption, 1.6 ma typ. Extremely large control range Low output saturation voltage, almost
Microcontact printing on metallic surfaces for optical deformation measurements
 Proceedings of the Estonian Academy of Sciences, 2015, 64, 3, 1 9 Proceedings of the Estonian Academy of Sciences, 2017, 66, 2, 184 188 https://doi.org/10.3176/proc.2017.2.07 Available online at www.eap.ee/proceedings
Proceedings of the Estonian Academy of Sciences, 2015, 64, 3, 1 9 Proceedings of the Estonian Academy of Sciences, 2017, 66, 2, 184 188 https://doi.org/10.3176/proc.2017.2.07 Available online at www.eap.ee/proceedings
MERE-ELEKTROONIKA KAATRITELE JA HARRASTUSKALASTAJATELE VÕID KINDEL OLLA
 MERE-ELEKTROONIKA KAATRITELE JA HARRASTUSKALASTAJATELE VÕID KINDEL OLLA MERE-ELEKTROONIKA KAATRITELE JA HARRASTUSKALASTAJATELE image SE Media Juba üle kuuekümne aasta on nimi SIMRAD tähendanud ühte asja:
MERE-ELEKTROONIKA KAATRITELE JA HARRASTUSKALASTAJATELE VÕID KINDEL OLLA MERE-ELEKTROONIKA KAATRITELE JA HARRASTUSKALASTAJATELE image SE Media Juba üle kuuekümne aasta on nimi SIMRAD tähendanud ühte asja:
The Torxis Linear Servo meets the following environmental conditions:
 Page: 1 1. PRODUCT DESCRIPTION The Torxis Linear Servo is the second generation of linear servos provided by GearWurx. This product features internal position sensing, and closed loop position control.
Page: 1 1. PRODUCT DESCRIPTION The Torxis Linear Servo is the second generation of linear servos provided by GearWurx. This product features internal position sensing, and closed loop position control.
UNISONIC TECHNOLOGIES CO., LTD LM321
 UNISONIC TECHNOLOGIES CO., LTD LM321 LOW POWER SINGLE OP AMP DESCRIPTION The UTC LM321 s quiescent current is only 430µA (5V). The UTC LM321 brings performance and economy to low power systems, With a
UNISONIC TECHNOLOGIES CO., LTD LM321 LOW POWER SINGLE OP AMP DESCRIPTION The UTC LM321 s quiescent current is only 430µA (5V). The UTC LM321 brings performance and economy to low power systems, With a
Training Schedule. Robotic System Design using Arduino Platform
 Training Schedule Robotic System Design using Arduino Platform Session - 1 Embedded System Design Basics : Scope : To introduce Embedded Systems hardware design fundamentals to students. Processor Selection
Training Schedule Robotic System Design using Arduino Platform Session - 1 Embedded System Design Basics : Scope : To introduce Embedded Systems hardware design fundamentals to students. Processor Selection
Enhanced SmartDrive40 MDS40B
 Enhanced SmartDrive40 MDS40B User's Manual Rev 1.0 December 2015 Created by Cytron Technologies Sdn. Bhd. All Rights Reserved 1 INDEX 1. Introduction 3 2. Packing List 4 3. Product Specifications 5 4.
Enhanced SmartDrive40 MDS40B User's Manual Rev 1.0 December 2015 Created by Cytron Technologies Sdn. Bhd. All Rights Reserved 1 INDEX 1. Introduction 3 2. Packing List 4 3. Product Specifications 5 4.
EXPERIMENT 5 CURRENT AND VOLTAGE CHARACTERISTICS OF BJT
 EXPERIMENT 5 CURRENT AND VOLTAGE CHARACTERISTICS OF BJT 1. OBJECTIVES 1.1 To practice how to test NPN and PNP transistors using multimeter. 1.2 To demonstrate the relationship between collector current
EXPERIMENT 5 CURRENT AND VOLTAGE CHARACTERISTICS OF BJT 1. OBJECTIVES 1.1 To practice how to test NPN and PNP transistors using multimeter. 1.2 To demonstrate the relationship between collector current
12V Dimmer Kit, version 2
 12V Dimmer Kit, version 2 User Manual Description The 12V Dimmer Kit V2 is an especially efficient PWM (pulse-width modulation) controller for 12V loads up to 60 watts. It features a single dial control
12V Dimmer Kit, version 2 User Manual Description The 12V Dimmer Kit V2 is an especially efficient PWM (pulse-width modulation) controller for 12V loads up to 60 watts. It features a single dial control
Paigaldusjuhend (i) FuranFlex. Versioon
 FuranFlex. Versioon") Paigaldusjuhend (i) FuranFlex PAIGALDUSJUHEND 1. KASUTUSOTSTARVE... 2 2. JUHENDI HÕLMAVUS... 3 3. VIITED... 3 4. TEHNILINE KIRJELDUS... 3 4.1 TÖÖVAHENDID JA -MATERJALID... 3 4.2 TÖÖ KORRALDAMINE... 4 4.3
Paigaldusjuhend (i) FuranFlex PAIGALDUSJUHEND 1. KASUTUSOTSTARVE... 2 2. JUHENDI HÕLMAVUS... 3 3. VIITED... 3 4. TEHNILINE KIRJELDUS... 3 4.1 TÖÖVAHENDID JA -MATERJALID... 3 4.2 TÖÖ KORRALDAMINE... 4 4.3
Analog Front End Components for Bio-Impedance Measurement: Current Source Design and Implementation
 THESIS ON INFORMATICS AND SYSTEM ENGINEERING C63 Analog Front End Components for Bio-Impedance Measurement: Current Source Design and Implementation ARGO KASEMAA PRESS TALLINN UNIVERSITY OF TECHNOLOGY
THESIS ON INFORMATICS AND SYSTEM ENGINEERING C63 Analog Front End Components for Bio-Impedance Measurement: Current Source Design and Implementation ARGO KASEMAA PRESS TALLINN UNIVERSITY OF TECHNOLOGY
Eellaetava õhkrelva projekteerimine
 MEHHAANIKAINSTITUUT Tootearenduse õppetool MES70LT Vitali Lopatnjuk Eellaetava õhkrelva projekteerimine Autor taotleb tehnikateaduse magistri akadeemilist kraadi 1 AUTORIDEKLARATSIOON Deklareerin, et käesolev
MEHHAANIKAINSTITUUT Tootearenduse õppetool MES70LT Vitali Lopatnjuk Eellaetava õhkrelva projekteerimine Autor taotleb tehnikateaduse magistri akadeemilist kraadi 1 AUTORIDEKLARATSIOON Deklareerin, et käesolev
Universal Radius Mounting Option. Fixed Radius Mounting Option
 F e a t u r e s Factory Set for Same Day Dispatch (1 to 65,536 Pulses Per Rev) 100 Degrees Centegrate cabability as standard Opto-ASIC Technology Any bore - up to 15mm bore (Metric) or (Imperial) The 60HA
F e a t u r e s Factory Set for Same Day Dispatch (1 to 65,536 Pulses Per Rev) 100 Degrees Centegrate cabability as standard Opto-ASIC Technology Any bore - up to 15mm bore (Metric) or (Imperial) The 60HA
S100A40AC SERIES BRUSHLESS SERVO AMPLIFIERS Model: S100A40AC
 S100A-AC Series S100A40AC SERIES BRUSHLESS SERVO AMPLIFIERS Model: S100A40AC FEATURES: Surface-mount technology Small size, low cost, ease of use Optical isolation, see block diagram Sinusoidal drive and
S100A-AC Series S100A40AC SERIES BRUSHLESS SERVO AMPLIFIERS Model: S100A40AC FEATURES: Surface-mount technology Small size, low cost, ease of use Optical isolation, see block diagram Sinusoidal drive and
FEATURES. LTC Lithium-Ion Linear Battery Charger Controller DESCRIPTIO APPLICATIO S TYPICAL APPLICATIO
 FEATURES Complete Linear Charger Controller for 2-Cell Lithium-Ion Batteries Preset Charge Voltage with ±1% Accuracy Programmable Charge Current C/10 Charge Current Detection Output Programmable Charge
FEATURES Complete Linear Charger Controller for 2-Cell Lithium-Ion Batteries Preset Charge Voltage with ±1% Accuracy Programmable Charge Current C/10 Charge Current Detection Output Programmable Charge
PI3HDMI1210(-A) PI3HDMI1210-A Demo Board Rev.A User Manual
 PI3HDMI1210-A Demo Board Rev.A User Manual") PI3HDMI1210(-A) PI3HDMI1210-A Demo Board Rev.A User Manual Introduction This user manual describes the components and the usage of PI3HDMI1210(-A) demo Board Rev.A. Figure 1: Top View of PI3HDMI1210-A
PI3HDMI1210(-A) PI3HDMI1210-A Demo Board Rev.A User Manual Introduction This user manual describes the components and the usage of PI3HDMI1210(-A) demo Board Rev.A. Figure 1: Top View of PI3HDMI1210-A
Output configuration. Dark-ON. Light-ON. Dark-ON. Light-ON. Dark-ON. Light-ON
 ASH & ALAIN INDIA PVT LTD S-00, F.I.E.E., Okhla Industrial Area, Phase-ii, New Delhi-000(India) Tel : 0-797575 Fax : 0-79757 E-mail : sales@ashalain.com Photomicrosensor with Cable (Non-modulated) Slim,
ASH & ALAIN INDIA PVT LTD S-00, F.I.E.E., Okhla Industrial Area, Phase-ii, New Delhi-000(India) Tel : 0-797575 Fax : 0-79757 E-mail : sales@ashalain.com Photomicrosensor with Cable (Non-modulated) Slim,
ECE 445 Spring 2017 Autonomous Trash Can. Group #85: Eshwar Cheekati, Michael Gao, Aditya Sule
 ECE 445 Spring 27 Autonomous Trash Can Group #85: Eshwar Cheekati, Michael Gao, Aditya Sule Introduction High amount of waste generated Poor communication/trash management -> smelly odors Need for reminder
ECE 445 Spring 27 Autonomous Trash Can Group #85: Eshwar Cheekati, Michael Gao, Aditya Sule Introduction High amount of waste generated Poor communication/trash management -> smelly odors Need for reminder
Rakenduste loomine programmi GameMaker abil
 Tallinna Ülikool Informaatika Instituut Rakenduste loomine programmi GameMaker abil Bakalaureusetöö Autor: Martin Kadarik Juhendaja: Andrus Rinde Autor:...... 2012 Juhendaja:...... 2012 Instituudi direktor:......
Tallinna Ülikool Informaatika Instituut Rakenduste loomine programmi GameMaker abil Bakalaureusetöö Autor: Martin Kadarik Juhendaja: Andrus Rinde Autor:...... 2012 Juhendaja:...... 2012 Instituudi direktor:......
Ocean Controls KT-5198 Dual Bidirectional DC Motor Speed Controller
 Ocean Controls KT-5198 Dual Bidirectional DC Motor Speed Controller Microcontroller Based Controls 2 DC Motors 0-5V Analog, 1-2mS pulse or Serial Inputs for Motor Speed 10KHz, 1.25KHz or 156Hz selectable
Ocean Controls KT-5198 Dual Bidirectional DC Motor Speed Controller Microcontroller Based Controls 2 DC Motors 0-5V Analog, 1-2mS pulse or Serial Inputs for Motor Speed 10KHz, 1.25KHz or 156Hz selectable
Type Ordering Code Package TLE 4202 B Q67000-A8225 P-TO
 2-A DC Motor Driver TLE 4202 B Preliminary Data Bipolar IC Features Drives motors up to 2 A Integrated free-wheeling diodes 2.5 A Short-circuit proof to ground Overtemperature protection Low saturation
2-A DC Motor Driver TLE 4202 B Preliminary Data Bipolar IC Features Drives motors up to 2 A Integrated free-wheeling diodes 2.5 A Short-circuit proof to ground Overtemperature protection Low saturation
High Current DC Motor Driver Manual
 High Current DC Motor Driver Manual 1.0 INTRODUCTION AND OVERVIEW This driver is one of the latest smart series motor drivers designed to drive medium to high power brushed DC motor with current capacity
High Current DC Motor Driver Manual 1.0 INTRODUCTION AND OVERVIEW This driver is one of the latest smart series motor drivers designed to drive medium to high power brushed DC motor with current capacity
USB-B1 User Manual V1.1
 USB-B1 User Manual V1.1 Table of Contents 1 Introduction... 2 1.1 Device Overview... 2 1.2 System Overview... 3 1.3 Connectors... 4 1.3.1 USB Connector J11... 4 1.3.2 External Antenna Connector (J10)...
USB-B1 User Manual V1.1 Table of Contents 1 Introduction... 2 1.1 Device Overview... 2 1.2 System Overview... 3 1.3 Connectors... 4 1.3.1 USB Connector J11... 4 1.3.2 External Antenna Connector (J10)...
Control System Circuits with Opamps
 Control System Circuits with Opamps 27.04.2009 Purpose To introduce opamps, transistors and their usage To apply a control system with analog circuit elements. Difference Amplifier Figure 1 Basic Difference
Control System Circuits with Opamps 27.04.2009 Purpose To introduce opamps, transistors and their usage To apply a control system with analog circuit elements. Difference Amplifier Figure 1 Basic Difference
HAJUSANDMETEGA ÜLESANNETE ROLL FÜÜSIKAÕPPE EFEKTIIVSUSE TÕSTMISEL
 HAJUSANDMETEGA ÜLESANNETE ROLL FÜÜSIKAÕPPE EFEKTIIVSUSE TÕSTMISEL Sissejuhatus Üldteada on fakt, et viimasel ajal on täppisteaduste populaarsus langenud nii Eestis kui ka mujal maailmas. Olukorda on aidanud
HAJUSANDMETEGA ÜLESANNETE ROLL FÜÜSIKAÕPPE EFEKTIIVSUSE TÕSTMISEL Sissejuhatus Üldteada on fakt, et viimasel ajal on täppisteaduste populaarsus langenud nii Eestis kui ka mujal maailmas. Olukorda on aidanud
EESTI AKREDITEERIMISKESKUS
 Leht Page 1 (8) EESTI AKREDITEERIMISKESKUS LISA I AS Metrosert akrediteerimistunnistusele I050 ANNEX I to accreditation certificate I050 of Metrosert Ltd 1. Akrediteerimisulatus siseriikliku esma- ja kordustaatluse
Leht Page 1 (8) EESTI AKREDITEERIMISKESKUS LISA I AS Metrosert akrediteerimistunnistusele I050 ANNEX I to accreditation certificate I050 of Metrosert Ltd 1. Akrediteerimisulatus siseriikliku esma- ja kordustaatluse
Satelliiditeenused. Andreas Sisask
 Satelliiditeenused Andreas Sisask Kava Lühiülevaade satelliitidest ja teenuse tüüpidest Teenusest täpsemalt: Navigatsioon ja Galileo programm Kaugseire ja Copernicus programm Sidesatelliidid, operaatorid
Satelliiditeenused Andreas Sisask Kava Lühiülevaade satelliitidest ja teenuse tüüpidest Teenusest täpsemalt: Navigatsioon ja Galileo programm Kaugseire ja Copernicus programm Sidesatelliidid, operaatorid
I 2 C RedBot & DC Motor Servo Motor Control
 ECE3411 Fall 2016 Lecture 6c. I 2 C RedBot & DC Motor Servo Motor Control Marten van Dijk Department of Electrical & Computer Engineering University of Connecticut Email: marten.van_dijk@uconn.edu Slides
ECE3411 Fall 2016 Lecture 6c. I 2 C RedBot & DC Motor Servo Motor Control Marten van Dijk Department of Electrical & Computer Engineering University of Connecticut Email: marten.van_dijk@uconn.edu Slides
DE1.3 Electronics 1. Tips on Team Projects
 DE1.3 Electronics 1 Tips on Team Projects To help you progress with the team project, I have prepared this documents to provide extra instructions that you should find helpful. 1. How can I drive TWO motors
DE1.3 Electronics 1 Tips on Team Projects To help you progress with the team project, I have prepared this documents to provide extra instructions that you should find helpful. 1. How can I drive TWO motors
This document is a preview generated by EVS
 EESTI STANDARD EVS-ISO 5223:2013 TERAVILJA SÕELAD Test sieves for cereals (ISO 5223:1995+ISO 5223:1995/Amd 1:1999) EVS-ISO 5223:2013 EESTI STANDARDI EESSÕNA NATIONAL FOREWORD See Eesti standard EVS-ISO
EESTI STANDARD EVS-ISO 5223:2013 TERAVILJA SÕELAD Test sieves for cereals (ISO 5223:1995+ISO 5223:1995/Amd 1:1999) EVS-ISO 5223:2013 EESTI STANDARDI EESSÕNA NATIONAL FOREWORD See Eesti standard EVS-ISO
FABO ACADEMY X ELECTRONIC DESIGN
 ELECTRONIC DESIGN MAKE A DEVICE WITH INPUT & OUTPUT The Shanghaino can be programmed to use many input and output devices (a motor, a light sensor, etc) uploading an instruction code (a program) to it
ELECTRONIC DESIGN MAKE A DEVICE WITH INPUT & OUTPUT The Shanghaino can be programmed to use many input and output devices (a motor, a light sensor, etc) uploading an instruction code (a program) to it
Power supply voltage Output configuration Output code Resolution (pulses/rotation) Connection method Model
 Connection method Model") 60-mm-dia. Encoder Rugged Encoder for High-precision Detection of Automatic Machine Timing Rugged construction with the highest shaft loading. Radial: 120 N, Thrust: 50 N IP65f water- and oil-proof construction.
60-mm-dia. Encoder Rugged Encoder for High-precision Detection of Automatic Machine Timing Rugged construction with the highest shaft loading. Radial: 120 N, Thrust: 50 N IP65f water- and oil-proof construction.
Resolution (divisions) 256, 360, , 360, 720, 1,024 Pre-wired Model
 256, 360, , 360, 720, 1,024 Pre-wired Model") Authorised Distributors:- ASH & ALAIN INDIA PVT LTD S-100, F.I.E.E., Okhla Industrial Area, Phase-ii, New Delhi-110020(India) Tel : 011-4797575 Fax : 011-4797574 E-mail : sales@ashalain.com Absolute 60-mm-dia.
Authorised Distributors:- ASH & ALAIN INDIA PVT LTD S-100, F.I.E.E., Okhla Industrial Area, Phase-ii, New Delhi-110020(India) Tel : 011-4797575 Fax : 011-4797574 E-mail : sales@ashalain.com Absolute 60-mm-dia.
Swiss Manager. Kuremaa, Sten Kasela
 Swiss Manager Kuremaa, 2016. Sten Kasela Üldist http://swiss-manager.at FIDE ametlik programm Šveits : 1500 osalejat ja 23 vooru Ringsüsteem : 150 vooru Võistkondlik ringsüsteem: 1500 osalejat ja 50 võistkonda
Swiss Manager Kuremaa, 2016. Sten Kasela Üldist http://swiss-manager.at FIDE ametlik programm Šveits : 1500 osalejat ja 23 vooru Ringsüsteem : 150 vooru Võistkondlik ringsüsteem: 1500 osalejat ja 50 võistkonda
Evaluation Board for Motor Driver, Single-phase, PWM,
 Evaluation Board for Motor Driver, Single-phase, PWM, Full-wave, BLDC Motor Overview This evaluation board is designed to provide an easy and quick development platform for single-phase control applications,
Evaluation Board for Motor Driver, Single-phase, PWM, Full-wave, BLDC Motor Overview This evaluation board is designed to provide an easy and quick development platform for single-phase control applications,
Phys Lecture 3. Power circuits how to control your motors Noise and Shielding
 Phys 253 - Lecture 3 Power circuits how to control your motors Noise and Shielding Digital-to-Analog Conversion PWM 2 D/A Conversion and power circuits When would you like to produce an output signal that
Phys 253 - Lecture 3 Power circuits how to control your motors Noise and Shielding Digital-to-Analog Conversion PWM 2 D/A Conversion and power circuits When would you like to produce an output signal that
Functional Description
 Functional Description KC5188 And the outer Wai PNP The transistor can be composed of a DC pulse-width modulation circuit. When the control input terminal PIN2 (IN). Enter the cycles 20ms and pulse width
Functional Description KC5188 And the outer Wai PNP The transistor can be composed of a DC pulse-width modulation circuit. When the control input terminal PIN2 (IN). Enter the cycles 20ms and pulse width
JUMA-TRX2 DDS / Control Board description OH2NLT
 JUMA-TRX2 DDS / Control Board description OH2NLT 22.08.2007 General Key functions of the JUMA-TRX2 DDS / Control board are: - provide user interface functions with LCD display, buttons, potentiometers
JUMA-TRX2 DDS / Control Board description OH2NLT 22.08.2007 General Key functions of the JUMA-TRX2 DDS / Control board are: - provide user interface functions with LCD display, buttons, potentiometers
Mercury technical manual
 v.1 Mercury technical manual September 2017 1 Mercury technical manual v.1 Mercury technical manual 1. Introduction 2. Connection details 2.1 Pin assignments 2.2 Connecting multiple units 2.3 Mercury Link
v.1 Mercury technical manual September 2017 1 Mercury technical manual v.1 Mercury technical manual 1. Introduction 2. Connection details 2.1 Pin assignments 2.2 Connecting multiple units 2.3 Mercury Link
Supertex inc. HV9911DB2 Boost LED Driver Demoboard with 1:3000 Dimming Ratio and Excellent Current Regulation. Board Layout and Connection Diagram
 The is an LED driver capable of driving up to twenty 100mA LEDs in series from an input of 9-16V DC. The demoboard uses Supertex s HV9911 IC in a boost topology. The converter has a very good initial regulation,
The is an LED driver capable of driving up to twenty 100mA LEDs in series from an input of 9-16V DC. The demoboard uses Supertex s HV9911 IC in a boost topology. The converter has a very good initial regulation,
Influence of modification methods on colour properties of a linen fabric dyed with direct dyes
 Proceedings of the Estonian Academy of Sciences, 4017, 66, 2, Proceedings of the Estonian Academy of Sciences, 2018, 67, 2, 131 137 https://doi.org/10.3176/proc.2018.2.03 Available online at www.eap.ee/proceedings
Proceedings of the Estonian Academy of Sciences, 4017, 66, 2, Proceedings of the Estonian Academy of Sciences, 2018, 67, 2, 131 137 https://doi.org/10.3176/proc.2018.2.03 Available online at www.eap.ee/proceedings
Mängud on rohkem nagu juhtnöörid ja ideed, mida ette võtta projekti raames oma klassis.
 Kallis õpetaja, Siit leiad mõned ideed mängude ja ülesannete kohta õpilaste jaoks, kes osalevad kevad käes projektis. Need on koostatud nii, et saaksite kontollida õpilaste teadmisi. Mängud on rohkem nagu
Kallis õpetaja, Siit leiad mõned ideed mängude ja ülesannete kohta õpilaste jaoks, kes osalevad kevad käes projektis. Need on koostatud nii, et saaksite kontollida õpilaste teadmisi. Mängud on rohkem nagu
NJM324C. Low power quad operational amplifiers
 Low power quad operational amplifiers Features Wide gain bandwidth:.mhz typ. Input common-mode voltage range includes ground Large voltage gain:db typ. Very low supply current per amplifier:ua typ. Low
Low power quad operational amplifiers Features Wide gain bandwidth:.mhz typ. Input common-mode voltage range includes ground Large voltage gain:db typ. Very low supply current per amplifier:ua typ. Low
1. tund - Sissejuhatus robootikasse
 1. tund - Sissejuhatus robootikasse Tunni alustamine (1min) Videoklipp, milles robot Wall-E teeb kolme topsiga mustkunstitrikki. (http://www.youtube.com/watch?v=bs9dazazqao&feature=related, pealkiri: WallE
1. tund - Sissejuhatus robootikasse Tunni alustamine (1min) Videoklipp, milles robot Wall-E teeb kolme topsiga mustkunstitrikki. (http://www.youtube.com/watch?v=bs9dazazqao&feature=related, pealkiri: WallE
Servo click. PID: MIKROE 3133 Weight: 32 g
 Servo click PID: MIKROE 3133 Weight: 32 g Servo click is a 16-channel PWM servo driver with the voltage sensing circuitry. It can be used to simultaneously control 16 servo motors, each with its own programmable
Servo click PID: MIKROE 3133 Weight: 32 g Servo click is a 16-channel PWM servo driver with the voltage sensing circuitry. It can be used to simultaneously control 16 servo motors, each with its own programmable
SK-PW7 Servo. Power Bus. User Manual and Setup Guide. Rev 3.00 SK-PW7 User Manual & Setup Guide
 SK-PW7 Servo Power Bus User Manual and Setup Guide Rev 3.00 SK-PW7 User Manual & Setup Guide Table of Contents 1 Introduction...4 2 Package Contents...5 3 Safety...6 4 Principle of Operation...7 5 Connections...8
SK-PW7 Servo Power Bus User Manual and Setup Guide Rev 3.00 SK-PW7 User Manual & Setup Guide Table of Contents 1 Introduction...4 2 Package Contents...5 3 Safety...6 4 Principle of Operation...7 5 Connections...8
Line Following Circuit Board Wiring Guide
 Line Following Circuit Board Wiring Guide Soldering the Analog Optosensors 1. Obtain a line following printed circuit board from the store as well as three analog optosensors (w/6 resistors). 2. Remove
Line Following Circuit Board Wiring Guide Soldering the Analog Optosensors 1. Obtain a line following printed circuit board from the store as well as three analog optosensors (w/6 resistors). 2. Remove
UTC UNISONIC TECHNOLOGIES CO., LTD. 1 LINEAR INTEGRATED CIRCUIT LOW DROP FIXED AND ADJUSTABLE POSITIVE VOLTAGE REGULATORS
 LOW DROP FIXED AND ADJUSTABLE POSITIE OLTAGE REGULATORS DESCRIPTION The UTC LD1117/A is a LOW DROP oltage Regulator able to provide up to 0.8/1.0A of Output Current, available even in adjustable version
LOW DROP FIXED AND ADJUSTABLE POSITIE OLTAGE REGULATORS DESCRIPTION The UTC LD1117/A is a LOW DROP oltage Regulator able to provide up to 0.8/1.0A of Output Current, available even in adjustable version
RS232-B1 User Manual V1.2 05/10/2017
 RS232-B1 User Manual V1.2 05/10/2017 Table of Contents 1. Introduction...2 1.1 Device Overview... 2 1.2 System Overview... 3 1.3 Features... 3 1.4 Connectors... 4 1.4.1 RS232 Connectors (J1, J2)... 4 1.4.2
RS232-B1 User Manual V1.2 05/10/2017 Table of Contents 1. Introduction...2 1.1 Device Overview... 2 1.2 System Overview... 3 1.3 Features... 3 1.4 Connectors... 4 1.4.1 RS232 Connectors (J1, J2)... 4 1.4.2
Precision Micropower Single Supply Operational Amplifier OP777
 a FEATURES Low Offset Voltage: 1 V Max Low Input Bias Current: 1 na Max Single-Supply Operation: 2.7 V to 3 V Dual-Supply Operation: 1.35 V to 15 V Low Supply Current: 27 A/Amp Unity Gain Stable No Phase
a FEATURES Low Offset Voltage: 1 V Max Low Input Bias Current: 1 na Max Single-Supply Operation: 2.7 V to 3 V Dual-Supply Operation: 1.35 V to 15 V Low Supply Current: 27 A/Amp Unity Gain Stable No Phase
Tarocco Closed Loop Motor Controller
 Contents Safety Information... 3 Overview... 4 Features... 4 SoC for Closed Loop Control... 4 Gate Driver... 5 MOSFETs in H Bridge Configuration... 5 Device Characteristics... 6 Installation... 7 Motor
Contents Safety Information... 3 Overview... 4 Features... 4 SoC for Closed Loop Control... 4 Gate Driver... 5 MOSFETs in H Bridge Configuration... 5 Device Characteristics... 6 Installation... 7 Motor
DC-Motor Driver circuits
 DC-Mot May 19, 2012 Why is there a need for a motor driver circuit? Normal DC gear-head motors requires current greater than 250mA. ICs like 555 timer, ATmega Microcontroller, 74 series ICs cannot supply
DC-Mot May 19, 2012 Why is there a need for a motor driver circuit? Normal DC gear-head motors requires current greater than 250mA. ICs like 555 timer, ATmega Microcontroller, 74 series ICs cannot supply
Controlling DC Brush Motor using MD10B or MD30B. Version 1.2. Aug Cytron Technologies Sdn. Bhd.
 PR10 Controlling DC Brush Motor using MD10B or MD30B Version 1.2 Aug 2008 Cytron Technologies Sdn. Bhd. Information contained in this publication regarding device applications and the like is intended
PR10 Controlling DC Brush Motor using MD10B or MD30B Version 1.2 Aug 2008 Cytron Technologies Sdn. Bhd. Information contained in this publication regarding device applications and the like is intended
OPERATIONAL AMPLIFIER & VOLTAGE REFERENCE KL103/A TECHNICAL DATA DESCRIPTION. PIN CONNECTIONS (top view) OPERATIONAL AMPLIFIER
 OPERATIONAL AMPLIFIER") TECHNICAL DATA OPERATIONAL AMPLIFIER & OLTAGE REFERENCE KL13/A OPERATIONAL AMPLIFIER LOW INPUT OFFSET OLTAGE :. typ. LOW SUPPLY CURRENT : 3 A/op. (@ cc = ) MEDIUM BANDWIDTH (unity gain) :.9MHz LARGE OUTPUT
TECHNICAL DATA OPERATIONAL AMPLIFIER & OLTAGE REFERENCE KL13/A OPERATIONAL AMPLIFIER LOW INPUT OFFSET OLTAGE :. typ. LOW SUPPLY CURRENT : 3 A/op. (@ cc = ) MEDIUM BANDWIDTH (unity gain) :.9MHz LARGE OUTPUT
TALLINNA PEDAGOOGIKAÜLIKOOL. GPS Global Positioning System
 TALLINNA PEDAGOOGIKAÜLIKOOL Matemaatika-loodusteaduskond Informaatika osakond Kelly Erin-Uussaar GPS Global Positioning System Proseminaritöö Juhendaja: Kalle Tabur Tallinn 2003 1 Sisukord Sisukord...2
TALLINNA PEDAGOOGIKAÜLIKOOL Matemaatika-loodusteaduskond Informaatika osakond Kelly Erin-Uussaar GPS Global Positioning System Proseminaritöö Juhendaja: Kalle Tabur Tallinn 2003 1 Sisukord Sisukord...2
TARTU SUVI, juuni 2018
 1. KOHT Eesti Rahva Muuseum, Muuseumi tee 2, Tartu 2. REGISTREERIMINE & AJAKAVA TARTU SUVI, 9. - 10. juuni 2018 Eraldi kiir- ja välkturniir Juhend Eelregistreerimine kuni 6. juunini 2018. Eelregistreerimine
1. KOHT Eesti Rahva Muuseum, Muuseumi tee 2, Tartu 2. REGISTREERIMINE & AJAKAVA TARTU SUVI, 9. - 10. juuni 2018 Eraldi kiir- ja välkturniir Juhend Eelregistreerimine kuni 6. juunini 2018. Eelregistreerimine
Adafruit 16-Channel Servo Driver with Arduino
 Adafruit 16-Channel Servo Driver with Arduino Created by Bill Earl Last updated on 2017-11-26 09:41:23 PM UTC Guide Contents Guide Contents Overview Assembly Install the Servo Headers Solder all pins Add
Adafruit 16-Channel Servo Driver with Arduino Created by Bill Earl Last updated on 2017-11-26 09:41:23 PM UTC Guide Contents Guide Contents Overview Assembly Install the Servo Headers Solder all pins Add
EUP MHz, 800mA Synchronous Step-Down Converter with Soft Start
 1.5MHz, 800mA Synchronous Step-Down Converter with Soft Start DESCRIPTION The is a constant frequency, current mode, PWM step-down converter. The device integrates a main switch and a synchronous rectifier
1.5MHz, 800mA Synchronous Step-Down Converter with Soft Start DESCRIPTION The is a constant frequency, current mode, PWM step-down converter. The device integrates a main switch and a synchronous rectifier
7. Kanalikiht II. Side IRT3930 Ivo Müürsepp
 7. Kanalikiht II Side IRT393 Ivo Müürsepp CSMA/CD Kuula, kas keegi teine edastab (meedium vaba?). Kui meedium on vaba, siis edasta kaader. Kui meedium ei ole vaba, siis kuula edasi. Alusta kaadri edastamist
7. Kanalikiht II Side IRT393 Ivo Müürsepp CSMA/CD Kuula, kas keegi teine edastab (meedium vaba?). Kui meedium on vaba, siis edasta kaader. Kui meedium ei ole vaba, siis kuula edasi. Alusta kaadri edastamist
Prof. Ciro Natale. Francesco Castaldo Andrea Cirillo Pasquale Cirillo Umberto Ferrara Luigi Palmieri
 Real Time Control of an Anthropomorphic Robotic Arm using FPGA Advisor: Prof. Ciro Natale Students: Francesco Castaldo Andrea Cirillo Pasquale Cirillo Umberto Ferrara Luigi Palmieri Objective Introduction
Real Time Control of an Anthropomorphic Robotic Arm using FPGA Advisor: Prof. Ciro Natale Students: Francesco Castaldo Andrea Cirillo Pasquale Cirillo Umberto Ferrara Luigi Palmieri Objective Introduction
SIDE - KONSPEKT... 2
 SIDE - KONSPEKT... 2 SIDESÜSTEEM... 2 SIGNAALI KULG... 2 NÄIDE SHANNONI VALEMI KASUTAMISE KOHTA.... 3 VÕRK... 4 MOBIILVÕRGUD... 4 AHEL- JA PAKETTKOMMUNIKATSIOON... 5 PAKETTSIDE... 5 MOBIILSUS... 5 ÜLESANNE,
SIDE - KONSPEKT... 2 SIDESÜSTEEM... 2 SIGNAALI KULG... 2 NÄIDE SHANNONI VALEMI KASUTAMISE KOHTA.... 3 VÕRK... 4 MOBIILVÕRGUD... 4 AHEL- JA PAKETTKOMMUNIKATSIOON... 5 PAKETTSIDE... 5 MOBIILSUS... 5 ÜLESANNE,
Datasheet of the MEZ Stepper Servo Drive MEZ 2D VDC, 8.2A Peak, Closed-loop, No Tuning. Version
 Datasheet of the MEZ Stepper Servo Drive MEZ D880 4-75VDC, 8.A Peak, Closed-loop, No Tuning Version 0.1.1 http://www.motionking.com Features Step and direction control Closed position loop for no loss
Datasheet of the MEZ Stepper Servo Drive MEZ D880 4-75VDC, 8.A Peak, Closed-loop, No Tuning Version 0.1.1 http://www.motionking.com Features Step and direction control Closed position loop for no loss
DMP Electronics Inc Robotic Division
 DMP Electronics Inc Robotic Division Jul 2009 Agenda DMP SoC Family RB-100 Overview Hardware Introduction Accessory Support List Application Q & A DMP s ssoc Family Jul. 1998 Feb. 2007 386 40MHz 486 300MHz
DMP Electronics Inc Robotic Division Jul 2009 Agenda DMP SoC Family RB-100 Overview Hardware Introduction Accessory Support List Application Q & A DMP s ssoc Family Jul. 1998 Feb. 2007 386 40MHz 486 300MHz
Electronic Components
 Electronic Components Arduino Uno Arduino Uno is a microcontroller (a simple computer), it has no way to interact. Building circuits and interface is necessary. Battery Snap Battery Snap is used to connect
Electronic Components Arduino Uno Arduino Uno is a microcontroller (a simple computer), it has no way to interact. Building circuits and interface is necessary. Battery Snap Battery Snap is used to connect
Arvutimängude loomise võimalusi läbi Steam'i platvormi
 Tallinna Ülikool Digitehnoloogiate instituut Arvutimängude loomise võimalusi läbi Steam'i platvormi Seminaritöö Autor: Sander Eerik Sandrak Juhendaja: Martin Sillaots Autor:...... 2016 Juhendaja:......
Tallinna Ülikool Digitehnoloogiate instituut Arvutimängude loomise võimalusi läbi Steam'i platvormi Seminaritöö Autor: Sander Eerik Sandrak Juhendaja: Martin Sillaots Autor:...... 2016 Juhendaja:......
Walle. Members: Sebastian Hening. Amir Pourshafiee. Behnam Zohoor CMPE 118/L. Introduction to Mechatronics. Professor: Gabriel H.
 Walle Members: Sebastian Hening Amir Pourshafiee Behnam Zohoor CMPE 118/L Introduction to Mechatronics Professor: Gabriel H. Elkaim March 19, 2012 Page 2 Introduction: In this report, we will explain the
Walle Members: Sebastian Hening Amir Pourshafiee Behnam Zohoor CMPE 118/L Introduction to Mechatronics Professor: Gabriel H. Elkaim March 19, 2012 Page 2 Introduction: In this report, we will explain the
ESP32 Utility Driver
 Annotated Schematics Revision. Introduction. This document This document provide info about needed to program and operate the device and is intended for developers and more advanced users.. Content Introduction....
Annotated Schematics Revision. Introduction. This document This document provide info about needed to program and operate the device and is intended for developers and more advanced users.. Content Introduction....
Vacuum Tubes. BJT or FET. Transistor Configurations. Depends on application Amplifiers
 Vacuum Tubes 3 Handouts Lab 3 (2) Lecture notes Linear without feedback Characteristics independent of temperature Wider dynamic range Vacuum Tubes, BJT or FET? Circuit Analysis: Amplifier & Feedback Classic
Vacuum Tubes 3 Handouts Lab 3 (2) Lecture notes Linear without feedback Characteristics independent of temperature Wider dynamic range Vacuum Tubes, BJT or FET? Circuit Analysis: Amplifier & Feedback Classic
Toradex Colibri Development Board
 Toradex Colibri Development Board TM Gumstix, Inc. shall have no liability of any kind, express or implied, arising out of the use of the Information in this document, including direct, indirect, special
Toradex Colibri Development Board TM Gumstix, Inc. shall have no liability of any kind, express or implied, arising out of the use of the Information in this document, including direct, indirect, special
Contents OVERVIEW...1 CHARACTERISTICS... 1 SCOPE OF APPLICATION...2 WORKING PRINCIPLE...2 TECHNICAL PARAMETERS...2 POWER REQUIREMENT... 3 ABOUT SERVIC
 Laser PM2.5 Sensor specification Product model: SDS018 Version: V1.5 Nova Fitness Co.,Ltd 2015-10-9 Contents OVERVIEW...1 CHARACTERISTICS... 1 SCOPE OF APPLICATION...2 WORKING PRINCIPLE...2 TECHNICAL PARAMETERS...2
Laser PM2.5 Sensor specification Product model: SDS018 Version: V1.5 Nova Fitness Co.,Ltd 2015-10-9 Contents OVERVIEW...1 CHARACTERISTICS... 1 SCOPE OF APPLICATION...2 WORKING PRINCIPLE...2 TECHNICAL PARAMETERS...2
Fits Tiger 320 Series UNIVERSAL FREQ/COUNTER INPUT MODULE
 Fits Tiger 320 Series UNIVERSAL /ER INPUT MODULE Sensor. Magnetic, Namur, Source, Sink. De-coupling. 0.02 Hz high pass filter. Signal Type., (mv) or digital logic. Input Connector. Freq. Input (CH) Up/Down
Fits Tiger 320 Series UNIVERSAL /ER INPUT MODULE Sensor. Magnetic, Namur, Source, Sink. De-coupling. 0.02 Hz high pass filter. Signal Type., (mv) or digital logic. Input Connector. Freq. Input (CH) Up/Down
Project E.A.S.I II. POWER SUBSYSTEM.
 Project E.A.S.I Heath Cissell, Stephen Miles, Patrick Shiver, Hung Tran Dept. of Electrical and Computer Engineering, University of Central Florida, Orlando, Florida, 32816-2450 Abstract Project E.A.S.I
Project E.A.S.I Heath Cissell, Stephen Miles, Patrick Shiver, Hung Tran Dept. of Electrical and Computer Engineering, University of Central Florida, Orlando, Florida, 32816-2450 Abstract Project E.A.S.I
LM158,A-LM258,A LM358,A
 ,A-LM258,A LM358,A LOW POWER DUAL OPERATIONAL AMPLIFIERS INTERNALLY FREQUENCY COMPENSATED LARGE DC VOLTAGE GAIN: 1dB WIDE BANDWIDTH (unity gain): 1.1MHz (temperature compensated) VERY LOW SUPPLY CURRENT/OP
,A-LM258,A LM358,A LOW POWER DUAL OPERATIONAL AMPLIFIERS INTERNALLY FREQUENCY COMPENSATED LARGE DC VOLTAGE GAIN: 1dB WIDE BANDWIDTH (unity gain): 1.1MHz (temperature compensated) VERY LOW SUPPLY CURRENT/OP
Electronics, Sensors, and Actuators
 Electronics, Sensors, and Actuators 4/14/15 David Flicker BE107 Overview Basic electronics and components Sensors Actuators Electronics 101 Voltage, V, is fundamentally how much energy is gained or lost
Electronics, Sensors, and Actuators 4/14/15 David Flicker BE107 Overview Basic electronics and components Sensors Actuators Electronics 101 Voltage, V, is fundamentally how much energy is gained or lost
Austame autorite õigusi
 Piret Joalaid: Seadus kaitseb automaatselt kõiki teoseid, ka neid, mille autorit pole märgitud. Austame autorite õigusi P i r e t J o a l a i d Ristiku põhikooli eesti keele ja kirjanduse vanemõpetaja,
Piret Joalaid: Seadus kaitseb automaatselt kõiki teoseid, ka neid, mille autorit pole märgitud. Austame autorite õigusi P i r e t J o a l a i d Ristiku põhikooli eesti keele ja kirjanduse vanemõpetaja,
Technical guide. EC300 motor V8
 l 15/11/2016 1 st release Page 1 sur 7 Electrical installation 230V version : Motor Class I Power supply Voltage (recommended) 200 220..230 277 Vac Voltage (maximum) 174 293 Vac Frequency 48 50 65 Hz Power
l 15/11/2016 1 st release Page 1 sur 7 Electrical installation 230V version : Motor Class I Power supply Voltage (recommended) 200 220..230 277 Vac Voltage (maximum) 174 293 Vac Frequency 48 50 65 Hz Power
The µbotino Microcontroller Board
 The µbotino Microcontroller Board by Ro-Bot-X Designs Introduction. The µbotino Microcontroller Board is an Arduino compatible board for small robots. The 5x5cm (2x2 ) size and the built in 3 pin connectors
The µbotino Microcontroller Board by Ro-Bot-X Designs Introduction. The µbotino Microcontroller Board is an Arduino compatible board for small robots. The 5x5cm (2x2 ) size and the built in 3 pin connectors
ESE 350 Microcontroller Laboratory Lab 5: Sensor-Actuator Lab
 ESE 350 Microcontroller Laboratory Lab 5: Sensor-Actuator Lab The purpose of this lab is to learn about sensors and use the ADC module to digitize the sensor signals. You will use the digitized signals
ESE 350 Microcontroller Laboratory Lab 5: Sensor-Actuator Lab The purpose of this lab is to learn about sensors and use the ADC module to digitize the sensor signals. You will use the digitized signals
Intersil ISL6608CR Synchronous Rectified MOSFET Driver Circuit Analysis
 August 31, 2004 Intersil ISL6608CR Synchronous Rectified MOSFET Driver Circuit Analysis Table of Contents Introduction... Page 1 List of Figures... Page 2 Device Summary Sheet... Page 4 Schematics... Tab
August 31, 2004 Intersil ISL6608CR Synchronous Rectified MOSFET Driver Circuit Analysis Table of Contents Introduction... Page 1 List of Figures... Page 2 Device Summary Sheet... Page 4 Schematics... Tab
AVR443: Sensorbased control of three phase Brushless DC motor. 8-bit Microcontrollers. Application Note. Features. 1 Introduction
 AVR443: Sensorbased control of three phase Brushless DC motor Features Less than 5us response time on Hall sensor output change Theoretical maximum of 1600k RPM Over-current sensing and stall detection
AVR443: Sensorbased control of three phase Brushless DC motor Features Less than 5us response time on Hall sensor output change Theoretical maximum of 1600k RPM Over-current sensing and stall detection