GPS MOODULI REALISATSIOON JA ANALÜÜS SIRFSTAR IV KIIBI BAASIL Bakalaureuse lõputöö
|
|
|
- Rodney Rogers
- 6 years ago
- Views:
Transcription
1 TALLINNA TEHNIKAÜLIKOOL Infotehnoloogia teaduskond Thomas Johann Seebecki elektroonikainstituut Siduselektroonika teaduslaboratoorium Kristjan Lužkov GPS MOODULI REALISATSIOON JA ANALÜÜS SIRFSTAR IV KIIBI BAASIL Bakalaureuse lõputöö Juhendaja: Olev Märtens juhtivteadur Tallinn 2014
2 Autorideklaratsioon Olen koostanud antud töö iseseisvalt. Kõik töö koostamisel kasutatud teiste autorite tööd, olulised seisukohad, kirjandusalliktest ja mujalt pärinevad andmed on viidatud. Käesolevalt tööd ei ole varem esitatud kaitsmisele kusagil mujal. Kuupäev: Autor: Allkiri: 2
3 Lõputöö ülesanne Lõputöö teema: GPS mooduli realisatsioon ja analüüs SiRFStar IV kiibi baasil The realization and analysis of a GPS module based on the SiRFStar IV chip Teema päritolu: TTÜ Thomas Johann Seebecki elektroonikainstituut Lõputöö eesmärgid: Valmistada SiRFStar IV kiibiga GPS moodul ning analüüsida selle võimekust võrreldes teiste saadavate lahendustega. Oodatavad tulemused: Valmistatud trükkplaat SiRFStar IV kiibi jaoks ja GPSi spetsifikatsioonidele vastavad täpsused. Lähtetingimused: Kasutada on SiRFStar IV kiibid (nii eraldi kiip kui ka kiip koos planaarantenniga) ja sellele vastav NMEA protokolli andmeid töötlev programm. Lahendatavad küsimused: Kiibi trükkplaadi realisatsioon. GPSilt saadud NMEA formaadis andmete analüüs. Kuupäev: Üliõpilane: Juhendaja: Kinnitaja: Allkiri: Allkiri: Allkiri: 3
4 GPS MOODULI REALISATSIOON JA ANALÜÜS SIRFSTAR IV KIIBI BAASIL Annotatsioon Töö eesmärgis on uurida positsioneerimissüsteemi GPS ja analüüsida SiRFStar IV kiibi baaseeruvat GPS süsteemi. Olulisemaks eesmärgiks võib pidada GPS mooduli realisatsiooni ja seadme spetsifikatsioonidele vastavaid tulemusi. Selles töös põhilised käsitletud probleemid on GPS süsteemid, selle integratsioon arvutiga ning nende tulemuste analüüsimine. Oluliseks probleemiks on ka tulemuste õige graafiline kujutamine. Töö olulisemaks tulemuseks on reaalne GPS mooduli arendus ainult kiibi baasil. Peale positsioneermise saab sellega ka veel anda teistele seadmetele vajalikku informatsiooni aja, positsiooni ja liikumise kohta. Lõputöö on kirjutatud eesti keeles ning sisaldab teksti 30 leheküljel, 3 peatükki, 9 joonist ja 3 tabelit. 4
5 THE REALIZATION AND ANALYSIS OF A GPS MODULE BASED ON THE SIRFSTAR IV CHIP Annotation The goal is to examine the Global Positioning System and analyze SiRFStar IV GPS chip in detail. The most important objective are to put together and analyse a GPS module ja compare the result to the chip s specification requirements. GPS systems, their integration with a computer and the analysis of the data are the main subjects of this thesis. It is also important to have it all graphically in different plots. The main result of this thesis is to research and develop a gps module from a GPS chip. Also to have it outperform its specifications. Final thesis is written in Estonian and there are 30 pages, 3 chapters, 9 figures and 3 tables. 5
6 Jooniste nimekiri Joonis 1. GPS Cockpit programm. [12] Joonis 2. Maestro A2035-H ja TI ez430-chronos(pildil protoplaadi teisel küljel) Joonis 3. Maestro A2200-A ühenduste asetus (kiibi alt poolt vaadates) Joonis 4. Maestro A2200-A trükkplaadi skeem * Joonis 5. Maestro A2200-A trükkplaadi 4 kihti Eagle programmis Joonis 6. Maestro A2200-A GPS moodul koos antenni ja UART-USB konverteriga Joonis 7. GlobalSat BU-353 mõõtetulemused Joonis 8. Maestro A2035-H mõõtetulemused Joonis 9. Maestro A2200-A mõõtetulemused
7 Tabelite nimekiri Tabel 1. GPS moodulid Tabel 2. Maestro A2200-A ühenduste kirjeldused Tabel 3. Mõõtmiste kokkuvõte
8 Sisukord Autorideklaratsioon... 2 Lõputöö ülesanne... 3 Annotatsioon... 4 Annotation... 5 Jooniste nimekiri... 6 Tabelite nimekiri... 7 Sisukord... 8 Sissejuhatus... 9 Ülevaade Riistvara GPSide võrdlus GPS mooduli antennid Tarkvara Ülevaade erinevatest GPS koordinaatrakendustest Ülevaade erinevatest kaardirakendustest Teostus Ülevaade valitud seadmetest ja tarkvarast Trükkplaadi projekteerimine programmis Eagle Valmis produkt Mõõtmised Mõõtmiste algandmed Mõõtetulemused GlobalSat BU Maestro A2035-H Maestro A2200-A koos TW2010 antenniga Mõõtmiste kokkuvõte Järeldused Kasutatud kirjandus Lisad 1. R lähtekood
9 Sissejuhatus GPS (inglise keelsest lühendist Global Positioning System) on satelliitnavigatsiooni süsteem, mida arendatakse Ameerika Ühendriikide poolt. Täpse asukoha määramiseks on vaja vähemalt 4 satelliidi andmeid. GPS projekt algatati aastal 1973 ja täieliku kasutusvalmiduse saavutas aastal. Ühendriikide GPSile on tänapäeval vastu panna ka Venemaa GLONASS satelliitide programm, Euroopa GALILEO, Hiina Rahvavabariigi Compass Navigation System ja India Regional Navigational Satellite System (IRNSS), kuid need pole nii välja arenenud kui GPS. GPS konstellatsiooni kuulub praegu 32 satelliiti, mis asuvad umbes km kõrgusel orbiidil. [1] GPS satelliit saadab pidevalt väga suure täpsusega kellaaja, millal see sõnum välja saadeti, ja oma positsiooni taevas. Vastuvõtja kasutab neid andmeid, et kindlaks teha kaua võtab selle sõnumi kohale jõudmine ja arvutab vastuvõtja kauguse igast sateliidis teades valguse leviku kiirust. Iga arvutatud kaugus satelliidist tekitab teatud suurusega sfääri. Kasutades positsioneerimisvalemeid [2] arvutatakse vastuvõtja asukoht ja muudetakse see NMEA standardeid kasutades mõistetavaks programmidele kujutades vastuvõtja asukohta kaardil või andes ruumikordinaadid. GPS moodul ei paku ainult positsiooni, vaid sellel on veel teisigi võimalusi. PPS annab näiteks täpse elektrilise signaali kord sekundis ehk see võimaldas välistel seadmetel ennast ajastada GPSi satelliitide väga täpse aatomkella järgi. Selle täpsus võib olla alates 12st pikosekundist kuni paari mikrosekundini. [3] Peale PPSi on GPS moodulitel ka võimalus lisada erinevaid sensoreid kiirendusandureid, inertsiaalandurid jne. Seda nimetatakse Dead- Reckoning süsteemiks, kus kasutatakse erinevaid andureid mooduli positsiooni ja kiiruse määramiseks, et abistada GPS moodulit ennast kehva tingimustega stsenaariumis. Positsiooni täpsemaks määratlemiseks on tänapäeval võimalik kasutada ka keerukamaid GPS süsteeme nagu DGPS (Differential GPS) ja RTK (Real Time Kinematics), mis pakuvad reaalajas positsiooni parandusvõimalusi. Selleks on ehitatud üle-eestiline GNSS püsijaamade võrk [4], mis saadab vastavale GPS seadmele oma parandusandmeid. Nii on võimalik GPS moodulil saavutada cm täpsus oma positsioonis. Selliseid võimalusi kasutatakse peamiselt geodeesias ja ehituses, kus on tähtis saada võimalikult kindlaid tulemusi. Iga GPS sateliit saadab oma andmeid kahel sagedusel L1 ( Mhz) ja L2 ( Mhz). L1 sagedus on mõeldud tsiviilkasutamiseks ja on kättesaadav igale inimesele. L2 sagedus on mõeldud militaarkasutamiseks ning on krüpteeritud salajase W-koodiga, mida teab ainult Ameerika Ühendriikide militaarüksused. Alates aastast 2000 lülitas USA välja S/A (Selective Availability), mis tehislikult lisas tsiviilkasutuses olevatele GPS signaalidele lisamüra, et ei oleks võimalik saavutada maksimaalset täpsust. See lülitati välja 2. Mail Tänu sellele langes GPS mooduli suhteline täpsus 100 meetrilt umbes 15 meetrile. [5] 9
10 Ülevaade Järgnevalt tutvustatakse riistvara ja tarkvara, millele antud töös leitud lahendus põhineb ning nende põhjal hinnatakse valmiva süsteemi omadusi. Fookuses on peamiselt odavamad GPS moodulid ja tasuta tarkvara. 1.1 Riistvara Selle lõputöö jaoks sai vaadatud erinevaid GPS mooduleid, mis oleksid võimalikult odavad, kuid samas kasutaksid viimase aja tehnoloogiaid, et saavutada maksimaalne täpsus. Selleks sai otsitud peamiselt Mouserist, Farnellist ja teistest suurtematest elektroonikaladudest erinevaid mooduleid. Põhikriteeriumiteks olid mooduli odavus, võimalikult suure täpsuse saavutamine, lisa võimaluste olemasolu (nt. Assisted-GPS), lihtne ühildatavus arvutiga, madal voolutarve GPSide võrdlus Selleks, et leida GPS moodul millega saaks mõõtmisi läbi viia, sai koostatud tabel erinevatest GPS moodulitest, mida pakutakse peamistes elektroonikaladudes. Järgmisena on välja toodud tabel, kus on välja toodud valikusse jäänud seadmed. GlobalSat BU-353 [6] Sagedus L Mhz Täpsused 10m (5m WAAS enabled) Tracking sensitivity Navigation update rate Maestro A2035-H [7] L Mhz 2.5m (horisontaalne) Fastrax UP501 [8] L Mhz Parallax [9] L Mhz UBLOX Neo-6P [10] L Mhz 2.5m 10m 2.5m ( < 1m koos SBAS + PPP) Maestro A2200-A [11] L Mhz 2.5m -159 dbm -163 dbm -165 dbm -159 dbm -160 dbm -163 dbm 1 Hz 1 / 5 Hz 1 Hz kuni 10 Hz 1 Hz 1 Hz kuni 5 Hz 1 Hz kuni 5 Hz Antenna Planaarantenn Planaarantenn Planaarantenn Väline passiivantenn puudub puudub Time to 45 s 35 s 34 s 47 s 32 s 35 s First Fix Ühenduvus USB UART, SPI UART UART UART, USB, DDC, SPI UART, SPI GPS protokoll NMEA NMEA, OSP NMEA NMEA, Smart mode NMEA, UBX binary NMEA, OSP Tabel 1. GPS moodulid Valikusse jäänud GPSid on enamasti väikese planaarantenniga varustatud moodulid, kus on välja toodud UART või USB viad lihtsaks andmevahetuseks arvutiga. Enamus neist on mõeldud GPSi testimiseks ja valideerimiseks. 10
11 1.1.2 GPS mooduli antennid Enamus valikusse jäänud GPSidest omavad planaarantenni, mis on küllaltki kehva võimendusega. Nende plussiks on antenni mõõtmed ja lihtsus. Kui kasutatakse GPS moodulit välitingimustes, kus on taevas otse nähtav, siis planaarantenniga GPS moodul on piisav. Kuid kui on vaja kasutada GPSi sisetingimustes (näiteks autos, majas jne), siis on vajalik kasutada eraldi seisvat antenni. On olemas nii passiiv kui ka aktiiv GPS antenne. Passiivantenni eelis on see, et see ei vaja eraldi toidet antennis, kuid samas on antenni juhtme pikkus limiteeritud ühe meetriga. Aktiivantennil on sisse ehitatud signaalivõimendi, mis pikendab antenni juhtme pikkust märgatavalt. See võimaldab asetada antenni GPS moodulist eemale ja kohtadele, kus on parem nähtavus GPS satelliitidega. 1.2 Tarkvara Järgmisena on välja toodud põhilised vabavaralised GPS tarkvararakendused. Põhiliselt saab neid kategoriseerida kahte gruppi koordinaatrakendused ja kaardirakendused. Koordinaatrakenduse puhul on tegemist tavaliselt NMEA protokolli lugev programm, mis arvutab põhilised statistilised parameetrid iseloomustamaks GPS mooduli võimekust. Kaardirakendus ei võimalda enamasti nii põhjalikku analüüsi, vaid annab reaalajas GPSi asukohti kaardil. Mõlemal on omad eelised vastavalt GPSi kasutamise eesmärgile Ülevaade erinevatest GPS koordinaatrakendustest. Internetis leidub väga palju erinevaid lahendusi NMEA protokolli jaoks. Enamus neist on mõeldud lugema NMEA koodi reaalajas otse GPSilt kasutades selleks arvuti seriaalühendust. Põhilised osad programmis on NMEA terminal, signaali kvaliteedi aken, vaatlusaken (, kus on kõik statistilised näitajad GPSi positsiooni kohta) ja taevavaate aken(, kus näeb hetkel GPSile nähtavaid GNSS sateliite). Selline rakendus ongi just mõeldud rohkem GPSi testimiseks, mitte niivõrd navigeerimiseks ja lokeerimiseks. Proovides erinevaid programme, kõige parem erinevate GPSi testimiseks on GPSCockpit. [12] See on arendatud Maestro Wireless Solution ettevõtte poolt, kes valmistab ise erinevaid GPS mooduleid. Selle programmiga saab lindistada, uuesti mängida ja monitoorida kõiki NMEA formaadis GPS faile. GPSCockpit annab hea graafilise ja statistilise ülevaate GPSi täpsusest ja sateliitide olukorrast. See programm võimaldab saata ka sõnumeid GPS moodulile NMEA formaadis, näiteks kui on vaja sisse lülitada DGPS või mõni teine täpsust parandav featuur. 11
![Joonis 1. GPS Cockpit programm. [12]](/docs-images/74/70885691/images/12-0.jpg "1.2.2 Ülevaade erinevatest kaardirakendustest Kui on vajadus kaardirakendus järgi, siis on keerulisem leida vabavaralist GPS programmi, kus oleks olemas ka viimase versiooni kaardiuuendused.")
12 Joonis 1. GPS Cockpit programm. [12] Ülevaade erinevatest kaardirakendustest Kui on vajadus kaardirakendus järgi, siis on keerulisem leida vabavaralist GPS programmi, kus oleks olemas ka viimase versiooni kaardiuuendused. Üks variantidest on gpsvp, mis on mõeldud nutitelefonide, PDAde ja arvutite jaoks. [13] See kasutab OpenStreetMap kaarte ning toetab NMEA protokollil töötavaid GPSe. Selle programmi peamine eesmärk on navigatsioon ja positsioneerimine. Programm ei võimalda kuvada nii põhjalikke statistilisi kalkulatsioone kui GPSCockpit. Seda vabavaralist tarkvara on hea kasutada kui on vajadus pidevalt liikuda ja teada liikumiskiirust, suunda, distantsi, lühimat teed, läbitud teed jne. See programm võimaldab ka kasutada Maa-ameti ametliku WMS teenust, mis võimaldab kasutada Maa-ameti aluskaarte. 12

13 Teostus Testimiseks oli valitud 3 erinevat GPS moodulit, millega sai tehtud mõõtmisi. GPSidest jäi sõelale GlobalSat BU-353, Maestro A2035-H ja Maestro A2200-H moodulid. Kaks esimest on planaarantenniga ja A2200-H on kiibi kujul. Sellele on vaja juurde teha nii trükkplaat kui ka valida vastav GPS antenn. 2.1 Ülevaade valitud seadmetest ja tarkvarast Nagu eelmainitud, testimiseks osutus 3 erinevat GPS moodulit. Kaks neist on koos antenniga ning on vaja ainult arvutiga ühendada, et saaks alustada mõõtmistega. Maestro A2200-A on ainult GPS kiip ning sellele tuleb leida sobiv antenn ning valmistada vastav trükkplaat. GlobalSat BU-353 on juba kõik-ühes GPS ning töötab koheselt karbist välja võttes. Selle seadmega ei pidanud mingeid lisaseadistusi tegema. Kuna Maestro A2035-H moodulil on ainult UART liides, siis peab selle ümber muutma, et arvuti oleks suuteline GPSilt tulevaid sõnumeid saada. Selleks sai ühendatud GPS moodul TI ez430-chronos debugging seadmega, mis konverteeris UART kommunikatsiooni üle USB peale. Joonis 2. Maestro A2035-H ja TI ez430-chronos(pildil protoplaadi teisel küljel) Maestro A2200-A kujutub endast ainult ühte kiipi ning vajab seepärast eraldi antenni ja trükkplaati kuhu seda kõike asetada. Selleks sai valmistatud Eagle tarkvara Maestro A2200- A moodulile vastav joonis. Kuid enne seda pidi tutvuma A2200-A enda joonistega. 13
14 Joonis 3. Maestro A2200-A ühenduste asetus (kiibi alt poolt vaadates) 14

15 tabel. Muidugi on vaja teada ka, mida iga signaal endast tähendab. Selleks on signaalide Tabel 2. Maestro A2200-A ühenduste kirjeldused. 15
16 Kuna Maestro A2200-A puhul ei tulnud kaasa antenni, oli vaja ka antenn valida. Nagu varem mainitud on GPS antenne nii passiivsed kui ka aktiivseid. Nendeks katseteks on valitud Tallysman TW2010 Magnet Mount GPS L1 Antenna [14]. Tegemist on aktiivantenniga, mis on mõeldud professionaalseks kasutamiseks, kus on vajadus suure täpsuse järgi. Antenn on suure võimendusega 28 db ja pakub kaitset erinevate signaale segavate mürade eest. Vajadus oli ka USB ühenduse järgi. Kuna A2200-A pakub kommunikatsiooniks UART ja SPI liidest, siis sai sellest esimene valitud, kuid oli vaja ka lisada UART-USB konverter. Selleks sai valitud FTDI UB232R [15] arendusmoodul, mis pakub lihtsat võimalust konverteerida UART USB jaoks vajalikku formaati. Peale selle vajab GPS kiip ka voolu, mille saab see USB ühenduselt. Selleks on vaja konverteerida USB 5V tase GPSi jaoks vajalikku 3.3V peale. See on lahendatud LDOga. Valitud osutus Linear Technology LT1963EST-3.3 komponent. 2.2 Trükkplaadi projekteerimine programmis Eagle. Maestro A2200-A kiibile sai valmistatud vastav trükkplaat Eagle programmis kasutades juhiseid dokumentatsioonist [11]. Trükkplaadil on veel 16 ühendusega pistik, mis on mõeldud lisaseadmete jaoks, kui peaks olema vajadus ühendama kiirendusandureid või saata PPS signaali teise seadmesse. Trükkplaadil on realiseeritud ka voolu piirav skeem aktiivatenni jaoks. Kuna maksimaalne pinge aktiivantennile võib olla 5V ja vool 50 ma, siis on vaja piirata voolu. Lisaks sellele on komparaatorite baasil ehitatud ANTSTAT väljund signaal, mis näitab, kas on ühendatud aktiivantenn või mitte. ANTSTAT väljundis on loogiline madalväärtus, kui antenni voolutarve on väiksem kui 9 ma või suurem kui 16 ma. Samas väljundis on aga loogiline kõrgväärtus, kui antenni voolutarve on 9 ma ja 16 ma vahel. See tähendab, et antenni pesaga on ühendatud aktiivantenn, mis vajab voolu, et töödata. Joonis 4. Maestro A2200-A trükkplaadi skeem [11] 16

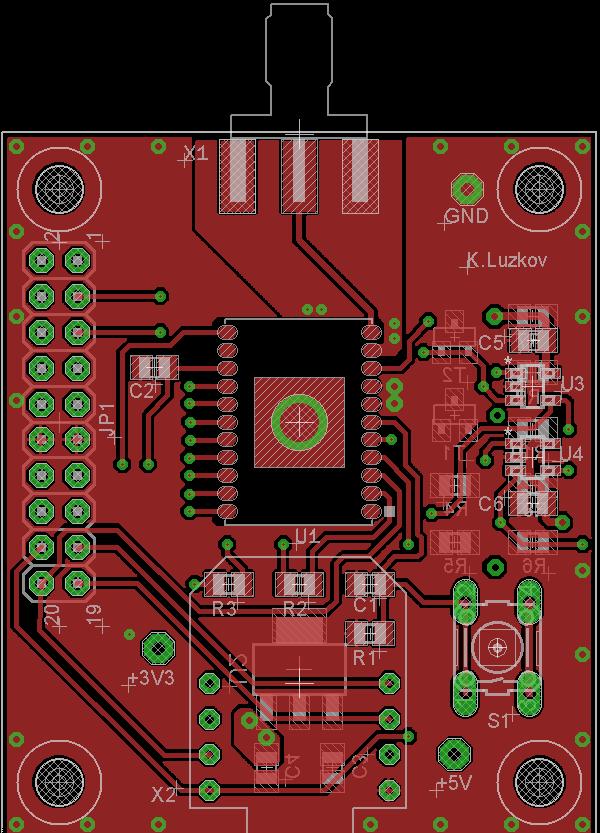
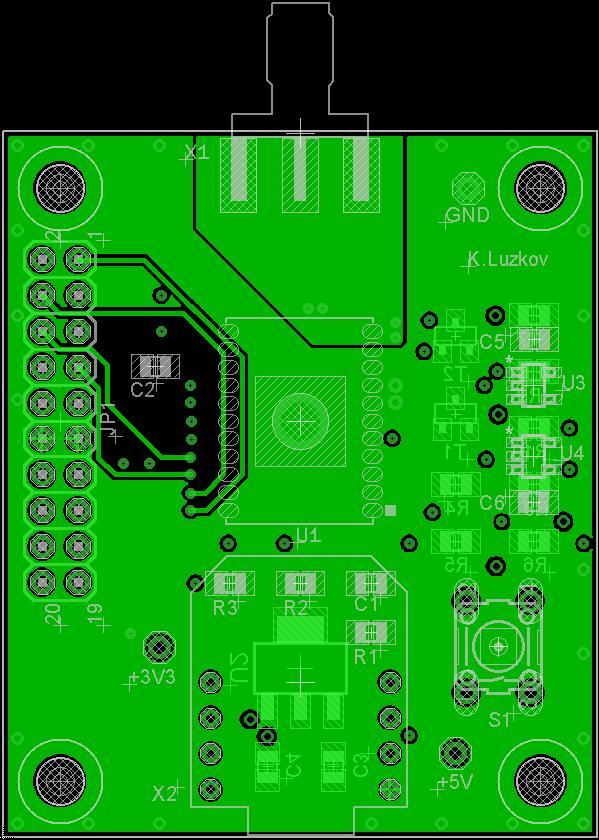
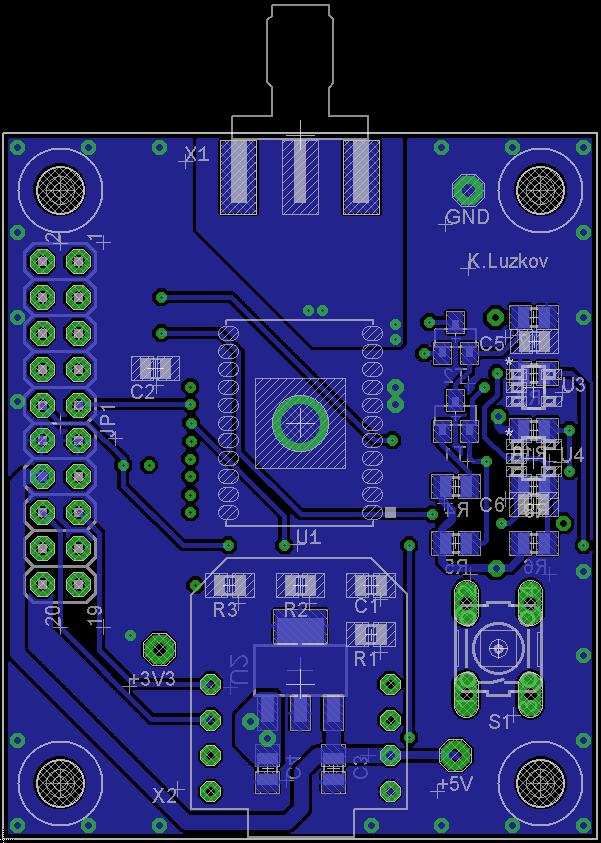
17 Joonis 5. Maestro A2200-A trükkplaadi 4 kihti Eagle programmis 17

18 2.3 Valmis produkt Trükkplaat on valmistatud Brandner OÜ poolt. Kui kõik komponendid sai peale joodetud, sai tehtud visuaalne kontroll, et kõik oleks trükkplaadil õigesti ja õiget pidi. Lüliti on selleks, et kiibile saata lühike ON/OFF impulss, et hakkaks saata positsiooni infot arvutile. Igas nurgas on M4 metallikruvi jaoks vajalik kinnituskoht, kui on vajadus trükkplaat kinnitada aluse peale. Joonis 6. Maestro A2200-A GPS moodul koos antenni ja UART-USB konverteriga 18

19 Mõõtmised 3.1 Mõõtmiste algandmed Kõik mõõtmised sai tehtud ühes kohas, kus taevas oli näha terves ulatuses. GPSid asetsesid maast umbes 1m kõrgusel staatilistelt. Mõõtmistega alustati pärast kahe minutilist soojendusperioodi, et GPSid leida kõik vajalikud sateliidid taevast ja arvutada täpse asukoha. Pärast seda lasti igal GPSil andmeid edastada 10 minutit. Kõik arvutused on tehtud GPSilt saadud info põhjalt ja toodud välja eraldi lisana selles töös. Mõõtmisteks kasutati kõiki kolme GPSi GlobalSat BU-353, Maestro A2035-H ja Maestro A2200-A koos TW2010 antenniga. GPSide asukohaks oli N, E. Mõõtmiste lindistamiseks ja analüüsimiseks kasutati GPSCockpit programmi. Sellel programmil on hea graafiline liides, mis võimaldab saada hea ülevaate GPSi võimekusest. 3.2 Mõõtetulemused GlobalSat BU-353 Joonis 7. GlobalSat BU-353 mõõtetulemused 19

20 3.2.2 Maestro A2035-H Joonis 8. Maestro A2035-H mõõtetulemused. 20

21 3.2.3 Maestro A2200-A koos TW2010 antenniga. Joonis 9. Maestro A2200-A mõõtetulemused 21
22 3.3 Mõõtmiste kokkuvõte Kõik mõõtmised olid edukad ja näitasid väga hästi GPSi võimekust. Kohe on tulemustes näha ka suurt täpsuse erinevust. Maestro A2200-A koos TW2010 antenniga oli palju täpsem kui teised kaks GPSi ning see on muidugi ka arusaadavam kuna antenni signaalivõimendus ja ülesehitus mängib positsioneerimises väga suurt rolli. GlobalSat BU-353 Maestro A2035-H Maestro A2200-A Täpsu s (tootja poolne ) Täpsus (mõõde tud) Standardhäl ve (Põhjalaiust / Idapikkust) Peak-to- Peak väärtuse d Peak-topeak väärtus (Kõrgus) Standardh älve (Kõrgus) Keskväärtu se absoluutne viga 10 m ~ 2 m 2.01 m / 0.29 m 6.67 m / 1.79 m 9.80 m 3.15 m ~2 m 2.5 m ~ 1.2 m 1.22 m / m / m 3.27 m ~3 m m 3.30 m 2.5 m ~ 0.4 m 0.39 m / m / 0.20 m 0.08 m ~0.5 m m 0.38 m Tabel 3. Mõõtmiste kokkuvõte Kõikide GPSide spetsifikatsioonid vastavad nende mõõtmiste tulemuste põhjal praktiliste mõõtmistega. Siinkohas peab muidugi mainima, et tegemist oli staatiliste, suhteliselt pikaajaliste mõõtmistega, kus polnud mingisuguseid takistavaid asjaolusi GPS sateliidi ja vastuvõtja vahel. Teades täpset asukohta Google Maps kaardi peal, kus sai mõõtmisi läbi viidud, siis saab arvutada ka absoluutse täpsuse. See korreleerub mingil määral mõõdetud standardhälvetega, kuid esineb suhteliselt suur veamäär. Siin pakkus ka kõige täpsemat tulemust Maestro A2200-A koos oma TW2010 aktiivantenniga. Kõik tulemused sai üle kontrollitud programmis R, mis on statistilise programmeerimise keel. Tulemused tulid samad, kuid tulemuste näitamine on parem GPS Cockpitis. Lähtekoodi on võimalik näha ka lisana töö lõpus. 22
23 Järeldused Globaalne positsioneerimissüsteem on saanud täiesti loomulikuks osaks inimese igapäeva elus. GPS mooduleid leidub nii autodes, laevades, lennukites, droonides, telefonides ja isegi matkariietes. Tehnoloogia areng on aidanud palju kaasa GPSide täpsuse paranemiseks. Lisaks sellele on veel suur faktor teiste globaalsete positsioneerimise süsteemide välja arendamine nagu Venemaa GLONASS, Euroopa GALILEO, India IRNSS ja Hiina Beidou-2. Kindlasti suureks mõjutuseks jääb alati ka GPSide militaartähtsus. Saadaval on väga erinevate mõõtmete ja otstarvetega GPS mooduleid. Selleks tööks sai valitud odavama poolsed GPSid, mis on laialt kasutatud üle maailma. Kahel valitud GPSil on sisse ehitatud planaarantenn ning kolmandal GPSil pidi koostama ise trükkplaadi kiibi jaoks ning sobitama vastavalt ka antenni. Mõõtmised võib lugeda õnnestunuks ning need portreerisid spetsifikatsioonidele vastavaid tulemusi. Kõige paremini toimis Maestro A2200-H koos eraldiseisva TW2010 aktiivantenniga. Positsioneerimise täpsuse parandamiseks on vajalik, et GPSil oleks otsenähtavus GPS satelliitidega. Järgmiste ülesannetena näen NMEA protokolli asemel kasutada binaarset formaati, mis edastab arvutile toorandmeid. Neid analüüsides saaks parema ülevaate, kuidas arendada odavaid GPS-lahendusi. Teine võimalus on proovida diferentsiaalset GPS kui kasutada mitut sarnast GPS moodulit sama aegselt (üks nendest käituks baasjaamana) ja analüüsida tulemusi. Tahan tänada oma juhendajat Olev Märtensit minu juhendamise ja õpetamise eest. Tänu temale oli võimalik see lõputöö lõpuni viia. 23
24 Kasutatud kirjandus _DataSheet_%28GPS.G6-HW-09005%29.pdf
25 Lisad 1. R lähtekood. require(ggplot2) require(reshape) libs <- c('ggplot2', 'latticeextra', 'gridextra', 'MASS', 'colorspace', 'plyr', 'Hmisc', 'scales') lapply(libs, require, character.only = T) xdata = read.table ( "C:/Users/Kristjan/Dropbox/R/GPS/test3_10min.txt", sep =",", fill= TRUE) xdat= (as.matrix (xdata)) number_of_records = (dim (xdata))[1] number_of_fields = (dim (xdata))[2] txt1cnt= 0 txt1="$gpgga" for (kk in (1:number_of_records)) # all records processed { if (xdat[kk, 1]==txt1) { txt1cnt= txt1cnt+1; } } N1 =rep (NA, txt1cnt) E1 =rep (NA, txt1cnt) H =rep (NA, txt1cnt) txt1cnt= 0 txt1="$gpgga" for (kk in (1:number_of_records)) # all records processed { if (xdat[kk, 1]==txt1) { txt1cnt= txt1cnt+1; N1[txt1cnt]= as.numeric (xdat[kk, 3]) ## +N E1[txt1cnt]= as.numeric (xdat[kk, 5]) ## +E H[txt1cnt]= as.numeric (xdat[kk, 10]) ## +H } } Grupp_cnt = as.integer(txt1cnt/30)+1 N_values = matrix (, Grupp_cnt, 30) E_values = matrix (, Grupp_cnt, 30) 25
26 H_values = matrix (, Grupp_cnt, 30) GGAcount = 1 grupp = 1 for (ll in (1:txt1cnt)) { N_values[grupp, GGAcount] = (N1[ll]) E_values[grupp, GGAcount] = (E1[ll]) H_values[grupp, GGAcount] = (H[ll]) GGAcount = GGAcount+1 if (GGAcount==31) { GGAcount = 1 grupp = grupp+1 } } N_mean = matrix (, Grupp_cnt, 1) N_sd = matrix (, Grupp_cnt, 1) N_pp = matrix (, Grupp_cnt, 1) E_mean = matrix (, Grupp_cnt, 1) E_sd = matrix (, Grupp_cnt, 1) E_pp = matrix (, Grupp_cnt, 1) H_mean = matrix (, Grupp_cnt, 1) H_sd = matrix (, Grupp_cnt, 1) H_pp = matrix (, Grupp_cnt, 1) for( mm in (1:Grupp_cnt)) { N_mean[mm, 1] = mean(n_values[mm,]) N_sd[mm, 1] = sd(n_values[mm,]) N_pp[mm, 1] = max(n_values[mm,])-min(n_values[mm,]) E_mean[mm, 1] = mean(e_values[mm,]) E_sd[mm, 1] = sd(e_values[mm,]) E_pp[mm, 1] = max(e_values[mm,])-min(e_values[mm,]) H_mean[mm, 1] = mean(h_values[mm,]) H_sd[mm, 1] = sd(h_values[mm,]) H_pp[mm, 1] = max(h_values[mm,])-min(h_values[mm,]) } N_mv <- c(n_mean) 26
27 E_mv <- c(e_mean) H_mv <- c(h_mean) N_sdv <- c(n_sd) E_sdv <- c(e_sd) H_sdv <- c(h_sd) N_ppv <- c(n_pp) E_ppv <- c(e_pp) H_ppv <- c(h_pp) stat.data <- data.frame(n_mv, E_mv, H_mv, N_sdv, E_sdv, H_sdv, N_ppv, E_ppv, H_ppv) N_mv_l = NA E_mv_l = NA H_mv_l = NA bb=3 for(aa in (1:Grupp_cnt)) { N_mv_l[bb]<-N_mv[aa] bb=bb+30 } bb=3 for(aa in (1:Grupp_cnt)) { E_mv_l[bb]<-E_mv[aa] bb=bb+30 } bb=3 for(aa in (1:Grupp_cnt)) { H_mv_l[bb]<-H_mv[aa] bb=bb+30 } ## Graafik 1 - tavaväärtused, keskväärtused df.g1.1 <- data.frame(time1 = 1:txt1cnt, "Tavaväärtus" = N1, Keskväärtus = N_mv_l) df.g1.1 <- melt(df.g1.1, id = 'time1', variable_name = 'series', na.rm = TRUE) df.g1.2 <- data.frame(time1 = 1:txt1cnt, "Tavaväärtus" = E1, Keskväärtus = E_mv_l) df.g1.2 <- melt(df.g1.2, id = 'time1', variable_name = 'series', na.rm = TRUE) df.g1.3 <- data.frame(time1 = 1:txt1cnt, "Tavaväärtus" = H, Keskväärtus = H_mv_l) df.g1.3 <- melt(df.g1.3, id = 'time1', variable_name = 'series', na.rm = TRUE) 27
28 plot1.1<-ggplot(df.g1.1, aes(time1,value)) + geom_line(aes(colour = series)) + ggtitle("n-telg") plot1.2<-ggplot(df.g1.2, aes(time1,value)) + geom_line(aes(colour = series)) + ggtitle("e-telg") plot1.3<-ggplot(df.g1.3, aes(time1,value)) + geom_line(aes(colour = series)) + ggtitle("kõrgus") print(plot1.1) windows() print(plot1.2) windows() print(plot1.3) ## Graafik 2 - P-P N_ppv_l = NA E_ppv_l = NA H_ppv_l = NA bb=3 for(aa in (1:Grupp_cnt)) { N_ppv_l[bb]<-N_ppv[aa] bb=bb+30 } bb=3 for(aa in (1:Grupp_cnt)) { E_ppv_l[bb]<-E_ppv[aa] bb=bb+30 } bb=3 for(aa in (1:Grupp_cnt)) { H_ppv_l[bb]<-H_ppv[aa] bb=bb+30 } time1 = 1:txt1cnt windows() df.g2.1 <- data.frame(time1 = 1:txt1cnt, "E-telg" = E_ppv_l, "N-telg" = N_ppv_l) df.g2.1 <- melt(df.g2.1, id = 'time1', variable_name = 'series', na.rm = TRUE) plot2.1<-ggplot(df.g2.1, aes(time1,value)) + geom_line(aes(colour = series)) + ggtitle("peak-to-peak N ja E telg") print(plot2.1) windows() 28
29 df.g2.2 <- data.frame(time1 = 1:txt1cnt, "H-telg" = H_ppv_l) df.g2.2 <- melt(df.g2.2, id = 'time1', variable_name = 'series', na.rm = TRUE) plot2.2<-ggplot(df.g2.2, aes(time1,value)) + geom_line(aes(colour = series)) + ggtitle("kõrguse Peakto-Peak väärtused") print(plot2.2) ##Graafik 3 - Regression line, Rsquared windows() df.r <- data.frame(aeg = 1:txt1cnt, N1, E1, H) scatter.latticen1 <- xyplot(n1 ~ aeg, data = df.r, type="l", panel = function(x, y,...) { panel.xyplot(x, y,...) lm1 <- lm(y ~ x) lm1sum <- summary(lm1) sd1 <- sd(n1) r2 <- lm1sum$adj.r.squared panel.abline(a = lm1$coefficients[1], b = lm1$coefficients[2]) panel.text(labels = bquote(italic(r)^2 ==.(format(r2, digits = 3))), x = 500, y = ) panel.text(labels = bquote(italic(sd) ==.(format(sd1, digits = 3))), x = 500, y = ) }, xscale.components = xscale.components.subticks, yscale.components = yscale.components.subticks, as.table = TRUE) print(scatter.latticen1) windows() scatter.latticee1 <- xyplot(e1 ~ aeg, data = df.r, type="l", panel = function(x, y,...) { panel.xyplot(x, y,...) lm1 <- lm(y ~ x) lm1sum <- summary(lm1) sd1 <- sd(e1) r2 <- lm1sum$adj.r.squared panel.abline(a = lm1$coefficients[1], b = lm1$coefficients[2]) panel.text(labels = bquote(italic(r)^2 ==.(format(r2, 29
30 print(scatter.latticee1) digits = 3))), x = 500, y = ) panel.text(labels = bquote(italic(sd) ==.(format(sd1, digits = 3))), x = 500, y = ) }, xscale.components = xscale.components.subticks, yscale.components = yscale.components.subticks, as.table = TRUE) windows() scatter.latticeh <- xyplot(h ~ aeg, data = df.r, type="l", panel = function(x, y,...) { panel.xyplot(x, y,...) lm1 <- lm(y ~ x) lm1sum <- summary(lm1) sd1 <- sd(h) r2 <- lm1sum$adj.r.squared panel.abline(a = lm1$coefficients[1], b = lm1$coefficients[2]) panel.text(labels = bquote(italic(r)^2 ==.(format(r2, digits = 3))), x = 500, y = 102) panel.text(labels = bquote(italic(sd) ==.(format(sd1, digits = 3))), x = 500, y = 101) }, xscale.components = xscale.components.subticks, yscale.components = yscale.components.subticks, as.table = TRUE) print(scatter.latticeh) 30
Arvude edastamine raadiosides. 1. Numbrite edastamine Numbrite edastamisel kasutatakse järgmist hääldust, rõhutades allajoonitud silpi.
 Majandus- ja kommunikatsiooniministri 8.03.2011. a määruse nr 20 Lennunduse raadioside reeglid lisa 2 Arvude edastamine raadiosides 1. Numbrite edastamine Numbrite edastamisel kasutatakse järgmist hääldust,
Majandus- ja kommunikatsiooniministri 8.03.2011. a määruse nr 20 Lennunduse raadioside reeglid lisa 2 Arvude edastamine raadiosides 1. Numbrite edastamine Numbrite edastamisel kasutatakse järgmist hääldust,
Survey Pro 4.8 GPS/GNSS juhend
 GPS/GNSS liikuvjaama mõõtmise alustamine Select RTK Rover: vali liikuvjaama seade. Select Networks: vali kasutatav püsijaam või võrk (eelnevalt seadistatud). Ühenda GNSS seadme ja võrguga. Antenna Type:
GPS/GNSS liikuvjaama mõõtmise alustamine Select RTK Rover: vali liikuvjaama seade. Select Networks: vali kasutatav püsijaam või võrk (eelnevalt seadistatud). Ühenda GNSS seadme ja võrguga. Antenna Type:
IRZ0190 Kanalikodeerimine telekommunikatsioonis. Julia Berdnikova julia.berdnikova [ät] ttu.ee Sander Ulp sander.ulp [ät] ttu.ee
![IRZ0190 Kanalikodeerimine telekommunikatsioonis. Julia Berdnikova julia.berdnikova [ät] ttu.ee Sander Ulp sander.ulp [ät] ttu.ee](/thumbs/75/72452435.jpg "IRZ0190 Kanalikodeerimine telekommunikatsioonis. Julia Berdnikova julia.berdnikova [ät] ttu.ee Sander Ulp sander.ulp [ät] ttu.ee") IRZ0190 Kanalikodeerimine telekommunikatsioonis Julia Berdnikova julia.berdnikova [ät] ttu.ee Sander Ulp sander.ulp [ät] ttu.ee 1 IRZ0190 Kanalikodeerimine telekommunikatsioonis Nädalatunnid: 2L+1P+1H
IRZ0190 Kanalikodeerimine telekommunikatsioonis Julia Berdnikova julia.berdnikova [ät] ttu.ee Sander Ulp sander.ulp [ät] ttu.ee 1 IRZ0190 Kanalikodeerimine telekommunikatsioonis Nädalatunnid: 2L+1P+1H
7. Kanalikiht II. Side IRT3930 Ivo Müürsepp
 7. Kanalikiht II Side IRT393 Ivo Müürsepp CSMA/CD Kuula, kas keegi teine edastab (meedium vaba?). Kui meedium on vaba, siis edasta kaader. Kui meedium ei ole vaba, siis kuula edasi. Alusta kaadri edastamist
7. Kanalikiht II Side IRT393 Ivo Müürsepp CSMA/CD Kuula, kas keegi teine edastab (meedium vaba?). Kui meedium on vaba, siis edasta kaader. Kui meedium ei ole vaba, siis kuula edasi. Alusta kaadri edastamist
PINDALA MÄÄRAMINE GIS-GNSS-SEADMEGA NING ERINEVATE TEGURITE MÕJU TULEMUSELE
 EESTI MAAÜLIKOOL Metsandus- ja maaehitusinstituut Karin Sabalisk PINDALA MÄÄRAMINE GIS-GNSS-SEADMEGA NING ERINEVATE TEGURITE MÕJU TULEMUSELE AREA DESIGNATION GIS GNSS EQUIPMENT AND THE RESULT OF THE INFLUENCE
EESTI MAAÜLIKOOL Metsandus- ja maaehitusinstituut Karin Sabalisk PINDALA MÄÄRAMINE GIS-GNSS-SEADMEGA NING ERINEVATE TEGURITE MÕJU TULEMUSELE AREA DESIGNATION GIS GNSS EQUIPMENT AND THE RESULT OF THE INFLUENCE
TALLINNA PEDAGOOGIKAÜLIKOOL. GPS Global Positioning System
 TALLINNA PEDAGOOGIKAÜLIKOOL Matemaatika-loodusteaduskond Informaatika osakond Kelly Erin-Uussaar GPS Global Positioning System Proseminaritöö Juhendaja: Kalle Tabur Tallinn 2003 1 Sisukord Sisukord...2
TALLINNA PEDAGOOGIKAÜLIKOOL Matemaatika-loodusteaduskond Informaatika osakond Kelly Erin-Uussaar GPS Global Positioning System Proseminaritöö Juhendaja: Kalle Tabur Tallinn 2003 1 Sisukord Sisukord...2
RTK GNSS MÕÕTMISTE STABIILSUS JA TÄPSUS ERINEVATES PÜSIJAAMADE VÕRKUDES
 EESTI MAAÜLIKOOL Metsandus- ja maaehitusinstituut Karel Kõre RTK GNSS MÕÕTMISTE STABIILSUS JA TÄPSUS ERINEVATES PÜSIJAAMADE VÕRKUDES RTK GNSS NETWORK MEASUREMENT STABILITY AND ACCURACY IN DIFFERENT REAL
EESTI MAAÜLIKOOL Metsandus- ja maaehitusinstituut Karel Kõre RTK GNSS MÕÕTMISTE STABIILSUS JA TÄPSUS ERINEVATES PÜSIJAAMADE VÕRKUDES RTK GNSS NETWORK MEASUREMENT STABILITY AND ACCURACY IN DIFFERENT REAL
Patsiendidoosi hindamine ja kvaliteedimııtmised radioloogia kvaliteedis steemi osana. I Patsiendidoosi hindamine
 Patsiendidoosi hindamine ja kvaliteedimııtmised radioloogia kvaliteedis steemi osana I Patsiendidoosi hindamine Kalle Kepler Tartu likool, BMTK Kalle.Kepler@ut.ee Kvaliteedis steemi rakendamine meditsiiniradioloogias
Patsiendidoosi hindamine ja kvaliteedimııtmised radioloogia kvaliteedis steemi osana I Patsiendidoosi hindamine Kalle Kepler Tartu likool, BMTK Kalle.Kepler@ut.ee Kvaliteedis steemi rakendamine meditsiiniradioloogias
Arvutimängude loomise võimalusi läbi Steam'i platvormi
 Tallinna Ülikool Digitehnoloogiate instituut Arvutimängude loomise võimalusi läbi Steam'i platvormi Seminaritöö Autor: Sander Eerik Sandrak Juhendaja: Martin Sillaots Autor:...... 2016 Juhendaja:......
Tallinna Ülikool Digitehnoloogiate instituut Arvutimängude loomise võimalusi läbi Steam'i platvormi Seminaritöö Autor: Sander Eerik Sandrak Juhendaja: Martin Sillaots Autor:...... 2016 Juhendaja:......
1. SAGEDUSMODULAATOR. Raadiotehnika laboratoorium RAADIO- JA SIDETEHNIKA INSTITUUT
 1. SAGEDUSMODULAATOR Raadiotehnika laboratoorium RAADIO- JA SIDETEHNIKA INSTITUUT Tallinn 2015 Infoedastusseadmete IRO 0050 laboratoorne töö Sagedusmodulaator Valminud Eesti Infotehnoloogia Sihtasutuse
1. SAGEDUSMODULAATOR Raadiotehnika laboratoorium RAADIO- JA SIDETEHNIKA INSTITUUT Tallinn 2015 Infoedastusseadmete IRO 0050 laboratoorne töö Sagedusmodulaator Valminud Eesti Infotehnoloogia Sihtasutuse
Presenter SNP6000. Register your product and get support at ET Kasutusjuhend
 Register your product and get support at www.philips.com/welcome Presenter SNP6000 ET Kasutusjuhend 1 a b c d e 2 3 4 Federal Communication Commission Interference Statement This equipment has been tested
Register your product and get support at www.philips.com/welcome Presenter SNP6000 ET Kasutusjuhend 1 a b c d e 2 3 4 Federal Communication Commission Interference Statement This equipment has been tested
Self-teaching Gomoku player using composite patterns with adaptive scores and the implemented playing framework
 TALLINN UNIVERSITY OF TECHNOLOGY Information Technology Department of Computer Science Chair of Network Software Self-teaching Gomoku player using composite patterns with adaptive scores and the implemented
TALLINN UNIVERSITY OF TECHNOLOGY Information Technology Department of Computer Science Chair of Network Software Self-teaching Gomoku player using composite patterns with adaptive scores and the implemented
GPS-INDEPENDENT OUTDOOR POSITIONING SYSTEM
 TALLINN UNIVERSITY OF TECHNOLOGY Faculty of Information Technology IEE70LT Levent SELÇUK 146105 IVEM GPS-INDEPENDENT OUTDOOR POSITIONING SYSTEM Master s Thesis Supervisor: Alar Kuusik PhD Senior Researcher
TALLINN UNIVERSITY OF TECHNOLOGY Faculty of Information Technology IEE70LT Levent SELÇUK 146105 IVEM GPS-INDEPENDENT OUTDOOR POSITIONING SYSTEM Master s Thesis Supervisor: Alar Kuusik PhD Senior Researcher
ÜLEVAADE SATELLIITSIDESÜSTEEMIDEST
 ÜLEVAADE SATELLIITSIDESÜSTEEMIDEST Käesolev kirjatükk annab ülevaate sellest, mida kujutavad endast satelliidid, millisel otstarbel neid kasutatakse ja millised on kasutamiseesmärkidest tulenevad piirangud
ÜLEVAADE SATELLIITSIDESÜSTEEMIDEST Käesolev kirjatükk annab ülevaate sellest, mida kujutavad endast satelliidid, millisel otstarbel neid kasutatakse ja millised on kasutamiseesmärkidest tulenevad piirangud
Marie Skłodowska-Curie individuaalgrandid. Tartu, 10. mai 2016 Kristin Kraav
 Marie Skłodowska-Curie individuaalgrandid Tartu, 10. mai 2016 Kristin Kraav kristin.kraav@etag.ee Tänane kava 9:30 12:30 töötame taotluse struktuuriga 12:30 13:30 lõunapaus 13:30 14:30 Kommunikatsioon
Marie Skłodowska-Curie individuaalgrandid Tartu, 10. mai 2016 Kristin Kraav kristin.kraav@etag.ee Tänane kava 9:30 12:30 töötame taotluse struktuuriga 12:30 13:30 lõunapaus 13:30 14:30 Kommunikatsioon
Algoritmide koostamise strateegiad
 Algoritmide koostamise strateegiad Algoritmide koostamise strateegiad (algorithmic paradigmas) on üldised põhimõtted sellest, kuidas konstrueerida tulemuslikke algoritme probleemide lahendamiseks. Miks
Algoritmide koostamise strateegiad Algoritmide koostamise strateegiad (algorithmic paradigmas) on üldised põhimõtted sellest, kuidas konstrueerida tulemuslikke algoritme probleemide lahendamiseks. Miks
Hillar Põldmaa 20. september 2010
 SF programm Infoühiskonna teadlikkuse tõstmine Hillar Põldmaa 20. september 2010 Koolitused ja infopäevad toimuvad Euroopa Liidu struktuurifondide programmi Infoühiskonna teadlikkuse tõstmine raames, mida
SF programm Infoühiskonna teadlikkuse tõstmine Hillar Põldmaa 20. september 2010 Koolitused ja infopäevad toimuvad Euroopa Liidu struktuurifondide programmi Infoühiskonna teadlikkuse tõstmine raames, mida
KÕRGUSLIKU TÄPSUSE SUURENDAMINE RTK RAKENDUSTES MILLIMEETER GPS ABIL IMPROVING VERTICAL ACCURACY IN RTK APPLICATIONS USING MILLIMETER GPS
 EESTI MAAÜLIKOOL Metsandus- ja maaehitusinstituut Toomas Orason KÕRGUSLIKU TÄPSUSE SUURENDAMINE RTK RAKENDUSTES MILLIMEETER GPS ABIL IMPROVING VERTICAL ACCURACY IN RTK APPLICATIONS USING MILLIMETER GPS
EESTI MAAÜLIKOOL Metsandus- ja maaehitusinstituut Toomas Orason KÕRGUSLIKU TÄPSUSE SUURENDAMINE RTK RAKENDUSTES MILLIMEETER GPS ABIL IMPROVING VERTICAL ACCURACY IN RTK APPLICATIONS USING MILLIMETER GPS
The GNSS-CONTROL System has been designed in house by Position-Control and is the result of over 15 years experience using different Sensor Systems.
 GNSS Control BASE 1 Robust fanless GNSS System The GNSS-CONTROL System has been designed in house by Position-Control and is the result of over 15 years experience using different Sensor Systems. GNSS-CONTROL
GNSS Control BASE 1 Robust fanless GNSS System The GNSS-CONTROL System has been designed in house by Position-Control and is the result of over 15 years experience using different Sensor Systems. GNSS-CONTROL
Roman Kulašenkov. Panoraamröntgenseadmete tunnussuurused ja patsiendidoos
 TARTU ÜLIKOOL LOODUS- JA TÄPPISTEADUSTE VALDKOND Füüsika Instituut Roman Kulašenkov Panoraamröntgenseadmete tunnussuurused ja patsiendidoos Füüsika õppekava bakalaureusetöö (12 EAP) Juhendaja(d): Kalle
TARTU ÜLIKOOL LOODUS- JA TÄPPISTEADUSTE VALDKOND Füüsika Instituut Roman Kulašenkov Panoraamröntgenseadmete tunnussuurused ja patsiendidoos Füüsika õppekava bakalaureusetöö (12 EAP) Juhendaja(d): Kalle
THE ROLE OF INFORMATION AND COMMUNICATION TECHNOLOGY FOR SMART CITY DEVELOPMENT IN CHINA
 TALLINN UNIVERSITY OF TECHNOLOGY Faculty of Information Technology Sihou Zhang IVGM 144949 THE ROLE OF INFORMATION AND COMMUNICATION TECHNOLOGY FOR SMART CITY DEVELOPMENT IN CHINA Master s thesis Supervisor:
TALLINN UNIVERSITY OF TECHNOLOGY Faculty of Information Technology Sihou Zhang IVGM 144949 THE ROLE OF INFORMATION AND COMMUNICATION TECHNOLOGY FOR SMART CITY DEVELOPMENT IN CHINA Master s thesis Supervisor:
GPS Application. Global Positioning System. We provide GPS module ODM / OEM service, any GPS receiver you want, we can provide customized services.
 GPS Application Global Positioning System We provide GPS module ODM / OEM service, any GPS receiver you want, we can provide customized services. www.win-tec.com.tw sales@win-tec.com.tw GNSS Receiver WGM-303
GPS Application Global Positioning System We provide GPS module ODM / OEM service, any GPS receiver you want, we can provide customized services. www.win-tec.com.tw sales@win-tec.com.tw GNSS Receiver WGM-303
EESTI MAAÜLIKOOL EMÜ Tartu Tehnikakolledž
 EESTI MAAÜLIKOOL EMÜ Tartu Tehnikakolledž Alo Veenpere ELEKTRISEADMETE KAUGJUHTIMISSÜSTEEMI PROJEKT REMOTE CONTROL PROJECT FOR ELECTRICAL APPLIANCES Rakenduskõrghariduse lõputöö tehnotroonika erialal Tartu
EESTI MAAÜLIKOOL EMÜ Tartu Tehnikakolledž Alo Veenpere ELEKTRISEADMETE KAUGJUHTIMISSÜSTEEMI PROJEKT REMOTE CONTROL PROJECT FOR ELECTRICAL APPLIANCES Rakenduskõrghariduse lõputöö tehnotroonika erialal Tartu
Hyperion NEO-M8N GPS
 Hyperion M8N GPS Product description The M8 series of concurrent GNSS modules is built on the high performing M8 GNSS engine in the industry proven NEO form factor. The M8 modules utilize concurrent reception
Hyperion M8N GPS Product description The M8 series of concurrent GNSS modules is built on the high performing M8 GNSS engine in the industry proven NEO form factor. The M8 modules utilize concurrent reception
Mängud on rohkem nagu juhtnöörid ja ideed, mida ette võtta projekti raames oma klassis.
 Kallis õpetaja, Siit leiad mõned ideed mängude ja ülesannete kohta õpilaste jaoks, kes osalevad kevad käes projektis. Need on koostatud nii, et saaksite kontollida õpilaste teadmisi. Mängud on rohkem nagu
Kallis õpetaja, Siit leiad mõned ideed mängude ja ülesannete kohta õpilaste jaoks, kes osalevad kevad käes projektis. Need on koostatud nii, et saaksite kontollida õpilaste teadmisi. Mängud on rohkem nagu
JAMMING OF SPREAD SPECTRUM COMMUNICATIONS USED IN UAV REMOTE CONTROL SYSTEMS
 TALLINN UNIVERSITY OF TECHNOLOGY School of Information Technologies Thomas Johann Seebeck Department of Electronics Karel Pärlin, IVEM153252 JAMMING OF SPREAD SPECTRUM COMMUNICATIONS USED IN UAV REMOTE
TALLINN UNIVERSITY OF TECHNOLOGY School of Information Technologies Thomas Johann Seebeck Department of Electronics Karel Pärlin, IVEM153252 JAMMING OF SPREAD SPECTRUM COMMUNICATIONS USED IN UAV REMOTE
Raspberry Pi based System for Visual Detection of Fluid Level
 Tallinn University of Technology Faculty of Information Technology Department of Computer Control Igor Petrov Raspberry Pi based System for Visual Detection of Fluid Level Bachelor s Thesis Supervisor(s):
Tallinn University of Technology Faculty of Information Technology Department of Computer Control Igor Petrov Raspberry Pi based System for Visual Detection of Fluid Level Bachelor s Thesis Supervisor(s):
Dota 2 Workshop Tools õppematerjal kohandatud mängude loomiseks
 Tallinna Ülikool Digitehnoloogiate Instituut Dota 2 Workshop Tools õppematerjal kohandatud mängude loomiseks Bakalaureusetöö Autor: Sander Leetus Juhendaja: Jaagup Kippar Autor:...... 2017 Juhendaja:......
Tallinna Ülikool Digitehnoloogiate Instituut Dota 2 Workshop Tools õppematerjal kohandatud mängude loomiseks Bakalaureusetöö Autor: Sander Leetus Juhendaja: Jaagup Kippar Autor:...... 2017 Juhendaja:......
This document is a preview generated by EVS
 EESTI STANDARD EVS-ISO 5223:2013 TERAVILJA SÕELAD Test sieves for cereals (ISO 5223:1995+ISO 5223:1995/Amd 1:1999) EVS-ISO 5223:2013 EESTI STANDARDI EESSÕNA NATIONAL FOREWORD See Eesti standard EVS-ISO
EESTI STANDARD EVS-ISO 5223:2013 TERAVILJA SÕELAD Test sieves for cereals (ISO 5223:1995+ISO 5223:1995/Amd 1:1999) EVS-ISO 5223:2013 EESTI STANDARDI EESSÕNA NATIONAL FOREWORD See Eesti standard EVS-ISO
Internetiturundus sotsiaalmeedia abil koeratoit.ee näitel
 Tallinna Ülikool Informaatika Instituut Internetiturundus sotsiaalmeedia abil koeratoit.ee näitel Bakalaureusetöö Autor: Tatjana Melnikova Juhendaja: Mart Laanpere Autor:...... 2011 Juhendaja:...... 2011
Tallinna Ülikool Informaatika Instituut Internetiturundus sotsiaalmeedia abil koeratoit.ee näitel Bakalaureusetöö Autor: Tatjana Melnikova Juhendaja: Mart Laanpere Autor:...... 2011 Juhendaja:...... 2011
Satelliiditeenused. Andreas Sisask
 Satelliiditeenused Andreas Sisask Kava Lühiülevaade satelliitidest ja teenuse tüüpidest Teenusest täpsemalt: Navigatsioon ja Galileo programm Kaugseire ja Copernicus programm Sidesatelliidid, operaatorid
Satelliiditeenused Andreas Sisask Kava Lühiülevaade satelliitidest ja teenuse tüüpidest Teenusest täpsemalt: Navigatsioon ja Galileo programm Kaugseire ja Copernicus programm Sidesatelliidid, operaatorid
Rakenduste loomine programmi GameMaker abil
 Tallinna Ülikool Informaatika Instituut Rakenduste loomine programmi GameMaker abil Bakalaureusetöö Autor: Martin Kadarik Juhendaja: Andrus Rinde Autor:...... 2012 Juhendaja:...... 2012 Instituudi direktor:......
Tallinna Ülikool Informaatika Instituut Rakenduste loomine programmi GameMaker abil Bakalaureusetöö Autor: Martin Kadarik Juhendaja: Andrus Rinde Autor:...... 2012 Juhendaja:...... 2012 Instituudi direktor:......
EESTI VABARIIK Republic of Estonia VARUSTUSE LOETELU RECORD OF EQUIPMENT
 Majandus- ja kommunikatsiooniministri 9. märtsi 2005. a määrus nr 30 Kohalikus rannasõidus sõitvate reisilaevade klassid, sõidupiirkonnad, ohutusnõuded ja ohutuse tunnistuse vorm Lisa 2 [RT I, 20.09.2013,
Majandus- ja kommunikatsiooniministri 9. märtsi 2005. a määrus nr 30 Kohalikus rannasõidus sõitvate reisilaevade klassid, sõidupiirkonnad, ohutusnõuded ja ohutuse tunnistuse vorm Lisa 2 [RT I, 20.09.2013,
Swiss Manager. Kuremaa, Sten Kasela
 Swiss Manager Kuremaa, 2016. Sten Kasela Üldist http://swiss-manager.at FIDE ametlik programm Šveits : 1500 osalejat ja 23 vooru Ringsüsteem : 150 vooru Võistkondlik ringsüsteem: 1500 osalejat ja 50 võistkonda
Swiss Manager Kuremaa, 2016. Sten Kasela Üldist http://swiss-manager.at FIDE ametlik programm Šveits : 1500 osalejat ja 23 vooru Ringsüsteem : 150 vooru Võistkondlik ringsüsteem: 1500 osalejat ja 50 võistkonda
Licence to learn. Karel Zova , Olustvere
 Licence to learn Karel Zova 7.11.2013, Olustvere Autoriõigused Tekivad teose loomisel Autoril pole kohustust registreerida, märkida vms Autorsuse presumptsioon Jagunevad isiklikeks ja varalisteks Autoriõigused
Licence to learn Karel Zova 7.11.2013, Olustvere Autoriõigused Tekivad teose loomisel Autoril pole kohustust registreerida, märkida vms Autorsuse presumptsioon Jagunevad isiklikeks ja varalisteks Autoriõigused
EVALUATION OF LED AS LIGHT SENSOR
 TALLINN UNIVERSITY OF TECHNOLOGY School of Information Technologies Aleksandr Nikolajev 153763IVEM EVALUATION OF LED AS LIGHT SENSOR Master s thesis Supervisor: Paul Annus PhD Tallinn 2017 TALLINNA TEHNIKAÜLIKOOL
TALLINN UNIVERSITY OF TECHNOLOGY School of Information Technologies Aleksandr Nikolajev 153763IVEM EVALUATION OF LED AS LIGHT SENSOR Master s thesis Supervisor: Paul Annus PhD Tallinn 2017 TALLINNA TEHNIKAÜLIKOOL
Suure dünaamilise ulatusega (HDR) fotograafia. Õppematerjal
 fotograafia. Õppematerjal") Tallinna Ülikool Informaatika Instituut Suure dünaamilise ulatusega (HDR) fotograafia. Õppematerjal Bakalaureusetöö Autor: Tiina Mõniste Juhendaja: Kalle Kivi Autor:.... 2012 Juhendaja:.... 2012 Instituudi
Tallinna Ülikool Informaatika Instituut Suure dünaamilise ulatusega (HDR) fotograafia. Õppematerjal Bakalaureusetöö Autor: Tiina Mõniste Juhendaja: Kalle Kivi Autor:.... 2012 Juhendaja:.... 2012 Instituudi
Control a Robot via VEP Using Emotiv EPOC
 UNIVERSITY OF TARTU FACULTY OF MATHEMATICS AND COMPUTER SCIENCE Institute of Computer Science Computer Science Curriculum Anti Ingel Control a Robot via VEP Using Emotiv EPOC Bachelor s Thesis (9 ECTS)
UNIVERSITY OF TARTU FACULTY OF MATHEMATICS AND COMPUTER SCIENCE Institute of Computer Science Computer Science Curriculum Anti Ingel Control a Robot via VEP Using Emotiv EPOC Bachelor s Thesis (9 ECTS)
Leader-follower System for Unmanned Ground Vehicle
 UNIVERSITY OF TARTU Institute of Computer Science Computer Science Curriculum Kristjan Jansons Leader-follower System for Unmanned Ground Vehicle Master s Thesis (30 ECTS) Supervisor: Tambet Matiisen,
UNIVERSITY OF TARTU Institute of Computer Science Computer Science Curriculum Kristjan Jansons Leader-follower System for Unmanned Ground Vehicle Master s Thesis (30 ECTS) Supervisor: Tambet Matiisen,
This document is a preview generated by EVS
 EESTI STANDARD EVS-EN 61580-6:2013 Methods of measurement for waveguides -- Part 6: Return loss on waveguide and waveguide assemblies EESTI STANDARDI EESSÕNA NATIONAL FOREWORD See Eesti standard EVS-EN
EESTI STANDARD EVS-EN 61580-6:2013 Methods of measurement for waveguides -- Part 6: Return loss on waveguide and waveguide assemblies EESTI STANDARDI EESSÕNA NATIONAL FOREWORD See Eesti standard EVS-EN
About Quality and Using of IKONOS Satellite Image in Estonia
 About Quality and Using of IKONOS Satellite Image in Estonia Ave KARGAJA, Ina MELNIKOVA, Natalja LIBA, Tarmo KALL and Taavi VEERMETS Estonia Key words: satellite image, geometric quality, geometric accuracy,
About Quality and Using of IKONOS Satellite Image in Estonia Ave KARGAJA, Ina MELNIKOVA, Natalja LIBA, Tarmo KALL and Taavi VEERMETS Estonia Key words: satellite image, geometric quality, geometric accuracy,
This document is a preview generated by EVS
 EESTI STANDARD EVS-EN 61108-3:2010 Maritime navigation and radiocommunication equipment and systems - Globalnavigation satellite systems (GNSS) - Part 3: Galileo - Receiver equipment - Performance requirements,
EESTI STANDARD EVS-EN 61108-3:2010 Maritime navigation and radiocommunication equipment and systems - Globalnavigation satellite systems (GNSS) - Part 3: Galileo - Receiver equipment - Performance requirements,
DEVELOPMENT OF A SOFTWARE-BASED GNSS-R RECEIVER FOR DELAY-DOPPLER MAP GENERATION
 TALLINN UNIVERSITY OF TECHNOLOGY School of Information Technologies Reto Gähwiler, IVEM165519 DEVELOPMENT OF A SOFTWARE-BASED GNSS-R RECEIVER FOR DELAY-DOPPLER MAP GENERATION Master s Thesis Supervisor
TALLINN UNIVERSITY OF TECHNOLOGY School of Information Technologies Reto Gähwiler, IVEM165519 DEVELOPMENT OF A SOFTWARE-BASED GNSS-R RECEIVER FOR DELAY-DOPPLER MAP GENERATION Master s Thesis Supervisor
TARTU ÜLIKOOL LOODUS- JA TEHNOLOOGIATEADUSKOND Tehnoloogiainstituut Arvutitehnika eriala
 TARTU ÜLIKOOL LOODUS- JA TEHNOLOOGIATEADUSKOND Tehnoloogiainstituut Arvutitehnika eriala Tõnis Terasmaa NÕUDED ROBOTMANNEKEENIDE FOTOSTUUDIO TEHNILISE TOE TARKVARALE Bakalaureusetöö (12 EAP) Juhendaja:
TARTU ÜLIKOOL LOODUS- JA TEHNOLOOGIATEADUSKOND Tehnoloogiainstituut Arvutitehnika eriala Tõnis Terasmaa NÕUDED ROBOTMANNEKEENIDE FOTOSTUUDIO TEHNILISE TOE TARKVARALE Bakalaureusetöö (12 EAP) Juhendaja:
This document is a preview generated by EVS
 EESTI STANDARD EVS-EN ISO 8015:2011 Toote geomeetrilised spetsifikatsioonid (GPS). Alused. Käsitlusviisid, põhimõtted ja reeglid Geometrical product specifications (GPS) - Fundamentals - Concepts, principles
EESTI STANDARD EVS-EN ISO 8015:2011 Toote geomeetrilised spetsifikatsioonid (GPS). Alused. Käsitlusviisid, põhimõtted ja reeglid Geometrical product specifications (GPS) - Fundamentals - Concepts, principles
TRIUMPH-LS. The Ultimate RTK Land Survey Machine
 The Ultimate RTK Land Survey Machine Introducing GUIDE data collection in the. Visual Stake-out, navigation, six parallel RTK engines, over 3,000 coordinate conversions, advanced CoGo features, rich attribute
The Ultimate RTK Land Survey Machine Introducing GUIDE data collection in the. Visual Stake-out, navigation, six parallel RTK engines, over 3,000 coordinate conversions, advanced CoGo features, rich attribute
GNSS Low-Cost High-Accuracy Receiver (L-CHAR)
") GNSS Low-Cost High-Accuracy Receiver (L-CHAR) Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 High Accuracy Receivers
GNSS Low-Cost High-Accuracy Receiver (L-CHAR) Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 High Accuracy Receivers
TARTU SUVI, juuni 2018
 1. KOHT Eesti Rahva Muuseum, Muuseumi tee 2, Tartu 2. REGISTREERIMINE & AJAKAVA TARTU SUVI, 9. - 10. juuni 2018 Eraldi kiir- ja välkturniir Juhend Eelregistreerimine kuni 6. juunini 2018. Eelregistreerimine
1. KOHT Eesti Rahva Muuseum, Muuseumi tee 2, Tartu 2. REGISTREERIMINE & AJAKAVA TARTU SUVI, 9. - 10. juuni 2018 Eraldi kiir- ja välkturniir Juhend Eelregistreerimine kuni 6. juunini 2018. Eelregistreerimine
Arduino stardikomplekti õppematerjalid
 TARTU ÜLIKOOL Arvutiteaduse instituut informaatika õppekava Selena Lubi Arduino stardikomplekti õppematerjalid Bakalaureusetöö (9 EAP) Juhendajad: Alo Peets, Taavi Duvin, Anne Villems Tartu 2016 Arduino
TARTU ÜLIKOOL Arvutiteaduse instituut informaatika õppekava Selena Lubi Arduino stardikomplekti õppematerjalid Bakalaureusetöö (9 EAP) Juhendajad: Alo Peets, Taavi Duvin, Anne Villems Tartu 2016 Arduino
EESTI INFOTEHNLOOGIA KOLLEDŽ
 EESTI INFOTEHNLOOGIA KOLLEDŽ Allan Vein REAALAINETE ÕPET TOETAVA ROBOOTIKAPLATVORMI LOOMINE Diplomitöö INFOTEHNOLOOGIA SÜSTEEMIDE ADMINISTREERIMISE ÕPPEKAVA Juhendaja: M. Ernits Tallinn 2010 AUTORIDEKLARATSIOON
EESTI INFOTEHNLOOGIA KOLLEDŽ Allan Vein REAALAINETE ÕPET TOETAVA ROBOOTIKAPLATVORMI LOOMINE Diplomitöö INFOTEHNOLOOGIA SÜSTEEMIDE ADMINISTREERIMISE ÕPPEKAVA Juhendaja: M. Ernits Tallinn 2010 AUTORIDEKLARATSIOON
SIDE (IRT 3930) Loeng 3/2012 Signaalid sidesüsteemis Teema - signaalid. Avo Ots. telekommunikatsiooni õppetool,
 Loeng 3/2012 Signaalid sidesüsteemis Teema - signaalid. Avo Ots. telekommunikatsiooni õppetool,") SIDE (IRT 3930) Loeng 3/2012 Signaalid sidesüsteemis Teema - signaalid Avo Ots telekommunikatsiooni õppetool, TTÜ raadio- ja sidetehnika inst. avo.ots@ttu.ee Signaalid 81 Süsteemi näide input Microphone
SIDE (IRT 3930) Loeng 3/2012 Signaalid sidesüsteemis Teema - signaalid Avo Ots telekommunikatsiooni õppetool, TTÜ raadio- ja sidetehnika inst. avo.ots@ttu.ee Signaalid 81 Süsteemi näide input Microphone
Sisukord. 1. Sensor AID Tutvustus. Eesti. 1. Sensor AID tutvustus. 4.1 Sensori ID kopeerimine Manuaalne ID modifitseerimine
 Eesti Sisukord 1. Sensor AID tutvustus 2. Sensori tuvastamine / tulemuste kirjeldus 3. Uus sensor 3.1 Automaatne duplikeerimine 3.2 Manuaalne duplikeerimine 3.3 Tühja sensori programeerimine 4. Uni-sensori
Eesti Sisukord 1. Sensor AID tutvustus 2. Sensori tuvastamine / tulemuste kirjeldus 3. Uus sensor 3.1 Automaatne duplikeerimine 3.2 Manuaalne duplikeerimine 3.3 Tühja sensori programeerimine 4. Uni-sensori
Sissejuhatus Objekt-Orienteeritud (O-O) andmebaasidesse ja ülevaade andmemudelite ajaloost.
 andmebaasidesse ja ülevaade andmemudelite ajaloost.") Sissejuhatus Objekt-Orienteeritud (O-O) andmebaasidesse ja ülevaade andmemudelite ajaloost. Mõisted: O-O andmebaaside kohustuslikud omadused; OID, O-O paradigma mõisted O-O andmebaasides (kapseldamine,
Sissejuhatus Objekt-Orienteeritud (O-O) andmebaasidesse ja ülevaade andmemudelite ajaloost. Mõisted: O-O andmebaaside kohustuslikud omadused; OID, O-O paradigma mõisted O-O andmebaasides (kapseldamine,
RAUDTEEDE PASPORTISEERIMINE VKG NÄITEL
 Anne Riin Arismaa RAUDTEEDE PASPORTISEERIMINE VKG NÄITEL LÕPUTÖÖ Ehitusteaduskond Rakendusgeodeesia eriala Tallinn 2015 Mina, Anne Riin Arismaa, tõendan, et lõputöö on minu kirjutatud. Töö koostamisel
Anne Riin Arismaa RAUDTEEDE PASPORTISEERIMINE VKG NÄITEL LÕPUTÖÖ Ehitusteaduskond Rakendusgeodeesia eriala Tallinn 2015 Mina, Anne Riin Arismaa, tõendan, et lõputöö on minu kirjutatud. Töö koostamisel
Kommunikatsiooniteenuste arendus
 Kommunikatsiooniteenuste arendus IRT0080 Loeng 7/2011 Avo Ots telekommunikatsiooni õppetool, TTÜ raadio- ja sidetehnika inst. avots@lr.ttu.ee 1 Inmarsat 2 I-4 Asukohad Satellite telephony 2.4kbps voice
Kommunikatsiooniteenuste arendus IRT0080 Loeng 7/2011 Avo Ots telekommunikatsiooni õppetool, TTÜ raadio- ja sidetehnika inst. avots@lr.ttu.ee 1 Inmarsat 2 I-4 Asukohad Satellite telephony 2.4kbps voice
ÕHU CO2 SISALDUSE MÕÕTESEADE
 TALLINNA TEHNIKAÜLIKOOL Informaatikateaduskond Thomas Johann Seebecki elektroonikainstituut Siduselektroonika õppetool ÕHU CO2 SISALDUSE MÕÕTESEADE Bakalaureusetöö Üliõpilane: Denry Aron Üliõpilaskood:
TALLINNA TEHNIKAÜLIKOOL Informaatikateaduskond Thomas Johann Seebecki elektroonikainstituut Siduselektroonika õppetool ÕHU CO2 SISALDUSE MÕÕTESEADE Bakalaureusetöö Üliõpilane: Denry Aron Üliõpilaskood:
EESTI STANDARD EVS-EN :1999
 EEST STANDARD EVS-EN 25183-1:1999 Kontaktpunktkeevitus. Elektroodide üleminekupuksid, pistikkoonused 1:10. Osa 1: Kooniline kinnitus, koonus 1:10. Resistance spot welding - Electrode adaptors, male taper
EEST STANDARD EVS-EN 25183-1:1999 Kontaktpunktkeevitus. Elektroodide üleminekupuksid, pistikkoonused 1:10. Osa 1: Kooniline kinnitus, koonus 1:10. Resistance spot welding - Electrode adaptors, male taper
QGP Supply. GNSS Receiver User Manual Version 3.1 UBX-M8030
 UBX-M8030 GNSS Receiver User Manual Version: 3.1 Table of Contents Overview... 3 Getting Started... 3 Applications... 4 Packing List... 5 Main Features... 5 Specifications... 6 Overview The GNSS Receiver
UBX-M8030 GNSS Receiver User Manual Version: 3.1 Table of Contents Overview... 3 Getting Started... 3 Applications... 4 Packing List... 5 Main Features... 5 Specifications... 6 Overview The GNSS Receiver
EMPIIRILINE UURING MUUSIKA- JA RÜTMIMÄNGUDEST
 TALLINNA ÜLIKOOL DIGITEHNOLOOGIATE INSTITUUT EMPIIRILINE UURING MUUSIKA- JA RÜTMIMÄNGUDEST Bakalaureusetöö Autor: Mario Haugas Juhendaja: Martin Sillaots Autor:...... 2016 Juhendaja:...... 2016 Instituudi
TALLINNA ÜLIKOOL DIGITEHNOLOOGIATE INSTITUUT EMPIIRILINE UURING MUUSIKA- JA RÜTMIMÄNGUDEST Bakalaureusetöö Autor: Mario Haugas Juhendaja: Martin Sillaots Autor:...... 2016 Juhendaja:...... 2016 Instituudi
Henri Lillmaa ESTCUBE-1 PÄIKESEELEMENDI SIMULAATORI ARENDUS JA TESTIMINE
 TARTU ÜLIKOOL LOODUS- JA TEHNOLOOGIATEADUSKOND Arvutitehnika eriala Henri Lillmaa ESTCUBE-1 PÄIKESEELEMENDI SIMULAATORI ARENDUS JA TESTIMINE Bakalaureusetöö (12 EAP) Juhendaja: M.Sc. Mihkel Pajusalu Tartu
TARTU ÜLIKOOL LOODUS- JA TEHNOLOOGIATEADUSKOND Arvutitehnika eriala Henri Lillmaa ESTCUBE-1 PÄIKESEELEMENDI SIMULAATORI ARENDUS JA TESTIMINE Bakalaureusetöö (12 EAP) Juhendaja: M.Sc. Mihkel Pajusalu Tartu
Introduction to Global Navigation Satellite System (GNSS) Signal Structure
 Signal Structure") Introduction to Global Navigation Satellite System (GNSS) Signal Structure Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp
Introduction to Global Navigation Satellite System (GNSS) Signal Structure Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp
Influence of modification methods on colour properties of a linen fabric dyed with direct dyes
 Proceedings of the Estonian Academy of Sciences, 4017, 66, 2, Proceedings of the Estonian Academy of Sciences, 2018, 67, 2, 131 137 https://doi.org/10.3176/proc.2018.2.03 Available online at www.eap.ee/proceedings
Proceedings of the Estonian Academy of Sciences, 4017, 66, 2, Proceedings of the Estonian Academy of Sciences, 2018, 67, 2, 131 137 https://doi.org/10.3176/proc.2018.2.03 Available online at www.eap.ee/proceedings
This document is a preview generated by EVS
 EESTI STANDARD EVS-EN ISO 2338:1999 Karastamata terasest ja roostevabast austeniitterasest silindertihvtid Parallel pins, of unhardened steel and austenitic stainless steel EESTI STANDARDIKESKUS EESTI
EESTI STANDARD EVS-EN ISO 2338:1999 Karastamata terasest ja roostevabast austeniitterasest silindertihvtid Parallel pins, of unhardened steel and austenitic stainless steel EESTI STANDARDIKESKUS EESTI
GPS93030S Series. GPS/GNSS Receiver (G-Mouse) Product Description: GPS93030S(M) is a compact, high performance, and low power consumption G-Mouse.
 Product Description: GPS93030S(M) is a compact, high performance, and low power consumption G-Mouse.") GPS/GNSS Receiver (G-Mouse) 1. Product Information Product Name : GPS93030S (Adhesive Mount) GPS93030SM (Magnetic Mount) Product Description: GPS93030S(M) is a compact, high performance, and low power
GPS/GNSS Receiver (G-Mouse) 1. Product Information Product Name : GPS93030S (Adhesive Mount) GPS93030SM (Magnetic Mount) Product Description: GPS93030S(M) is a compact, high performance, and low power
SIDE - KONSPEKT... 2
 SIDE - KONSPEKT... 2 SIDESÜSTEEM... 2 SIGNAALI KULG... 2 NÄIDE SHANNONI VALEMI KASUTAMISE KOHTA.... 3 VÕRK... 4 MOBIILVÕRGUD... 4 AHEL- JA PAKETTKOMMUNIKATSIOON... 5 PAKETTSIDE... 5 MOBIILSUS... 5 ÜLESANNE,
SIDE - KONSPEKT... 2 SIDESÜSTEEM... 2 SIGNAALI KULG... 2 NÄIDE SHANNONI VALEMI KASUTAMISE KOHTA.... 3 VÕRK... 4 MOBIILVÕRGUD... 4 AHEL- JA PAKETTKOMMUNIKATSIOON... 5 PAKETTSIDE... 5 MOBIILSUS... 5 ÜLESANNE,
Axial defect imaging in a pipe using synthetically focused guided waves
 Estonian Journal of Engineering, 2011, 17, 1, 66 75 doi: 10.3176/eng.2011.1.07 Axial defect imaging in a pipe using synthetically focused guided waves Madis Ratassepp a, Sam Fletcher b and Aleksander Klauson
Estonian Journal of Engineering, 2011, 17, 1, 66 75 doi: 10.3176/eng.2011.1.07 Axial defect imaging in a pipe using synthetically focused guided waves Madis Ratassepp a, Sam Fletcher b and Aleksander Klauson
REGISTRIPÕHISE RAHVA JA ELURUUMIDE LOENDUSE TARBIJAKÜSITLUS
 REGISTRIPÕHISE RAHVA JA ELURUUMIDE LOENDUSE TARBIJAKÜSITLUS Ene-Margit Tiit Statistikaamet Kellele ja milleks on rahvaloendust tarvis? Missuguseid rahvaloenduse tulemusi on seni kõige aktiivsemalt kasutatud?
REGISTRIPÕHISE RAHVA JA ELURUUMIDE LOENDUSE TARBIJAKÜSITLUS Ene-Margit Tiit Statistikaamet Kellele ja milleks on rahvaloendust tarvis? Missuguseid rahvaloenduse tulemusi on seni kõige aktiivsemalt kasutatud?
HDR (High Dynamic Range) fototöötlusprogrammide võrdlus
 fototöötlusprogrammide võrdlus") Tallinna Ülikool Informaatika Instituut HDR (High Dynamic Range) fototöötlusprogrammide võrdlus Seminaritöö Autor: Tiina Mõniste Juhendaja: Kalle Kivi Tallinn 2011 Sisukord Sisukord... 2 Sissejuhatus...
Tallinna Ülikool Informaatika Instituut HDR (High Dynamic Range) fototöötlusprogrammide võrdlus Seminaritöö Autor: Tiina Mõniste Juhendaja: Kalle Kivi Tallinn 2011 Sisukord Sisukord... 2 Sissejuhatus...
This document is a preview generated by EVS
 EESTI STANDARD EVS-EN 15016-1:2005 Tehnilised joonised Raudteealased rakendused Osa 1: Üldpõhimõtted Technical drawings - Railway applications - Part 1: General principles EESTI STANDARDIKESKUS EESTI STANDARDI
EESTI STANDARD EVS-EN 15016-1:2005 Tehnilised joonised Raudteealased rakendused Osa 1: Üldpõhimõtted Technical drawings - Railway applications - Part 1: General principles EESTI STANDARDIKESKUS EESTI STANDARDI
This document is a preview generated by EVS
 EESTI STANDARD EVS-EN 62153-4-7:2016 METALL-SIDEKAABLITE KATSETUSMEETODID. OSA 4-7: ELEKTROMAGNETILINE ÜHILDUVUS. SAGEDUSELE KUNI 3 GHz JA ÜLE SELLE ETTE NÄHTUD LIIDESTE JA KOOSTETE ÜLEKANDEIMPEDANTSI
EESTI STANDARD EVS-EN 62153-4-7:2016 METALL-SIDEKAABLITE KATSETUSMEETODID. OSA 4-7: ELEKTROMAGNETILINE ÜHILDUVUS. SAGEDUSELE KUNI 3 GHz JA ÜLE SELLE ETTE NÄHTUD LIIDESTE JA KOOSTETE ÜLEKANDEIMPEDANTSI
GU93030S Series. GPS/GNSS Receiver (G-Mouse) Product Description: GU93030S(M) is a compact, high performance, and low power consumption G-Mouse.
 Product Description: GU93030S(M) is a compact, high performance, and low power consumption G-Mouse.") GPS/GNSS Receiver (G-Mouse) 1. Product Information Product Name : GU93030S (Adhesive Mount) GU93030SM (Magnetic Mount) Product Description: GU93030S(M) is a compact, high performance, and low power consumption
GPS/GNSS Receiver (G-Mouse) 1. Product Information Product Name : GU93030S (Adhesive Mount) GU93030SM (Magnetic Mount) Product Description: GU93030S(M) is a compact, high performance, and low power consumption
Introduction to GNSS Base-Station
 Introduction to GNSS Base-Station Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 Introduction GPS or GNSS observation
Introduction to GNSS Base-Station Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 Introduction GPS or GNSS observation
RY836AI. High Performance GPS & Glonass / GPS & BeiDou Parallel mode antenna module with Compass, Gyroscope, Accelerometer, Pressure Sensor.
 27-OCT-2017 56312E31 High Performance GPS & Glonass / GPS & BeiDou Parallel mode antenna module with Compass, Gyroscope, Accelerometer, Pressure Sensor Datasheet PRODUCT DESCRIPTION The REYAX GNSS receiver
27-OCT-2017 56312E31 High Performance GPS & Glonass / GPS & BeiDou Parallel mode antenna module with Compass, Gyroscope, Accelerometer, Pressure Sensor Datasheet PRODUCT DESCRIPTION The REYAX GNSS receiver
This document is a preview generated by EVS
 EESTI STANDARD EVS-EN 60966-2-6:2009 Radio frequency and coaxial cable assemblies - Part 2-6: Detail specification for cable assemblies for radio and TV receivers - Frequency range 0 MHz to 3 000 MHz,
EESTI STANDARD EVS-EN 60966-2-6:2009 Radio frequency and coaxial cable assemblies - Part 2-6: Detail specification for cable assemblies for radio and TV receivers - Frequency range 0 MHz to 3 000 MHz,
Inertial Sensors. Ellipse Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.2 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.2 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
FOTOKAAMERATE JA TARKVARADE VÕRDLUS LÄHIFOTOGRAMM-MEETRILISTE 3D MUDELITE LOOMISEL
 EESTI MAAÜLIKOOL Metsandus- ja maaehitusinstituut Kärt Metsoja FOTOKAAMERATE JA TARKVARADE VÕRDLUS LÄHIFOTOGRAMM-MEETRILISTE 3D MUDELITE LOOMISEL MAKING 3D MODELS USING CLOSE-RANGE PHOTOGRAMMETRY: COMPARISON
EESTI MAAÜLIKOOL Metsandus- ja maaehitusinstituut Kärt Metsoja FOTOKAAMERATE JA TARKVARADE VÕRDLUS LÄHIFOTOGRAMM-MEETRILISTE 3D MUDELITE LOOMISEL MAKING 3D MODELS USING CLOSE-RANGE PHOTOGRAMMETRY: COMPARISON
Inertial Sensors. Ellipse Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Specifications. Trimble SPS985 GNSS Smart Antenna
 Receiver Name Configuration Option Base and Rover interchangeability Rover position update rate Rover maximum range from base radio Rover operation within a VRS network Heading and Moving Base operation
Receiver Name Configuration Option Base and Rover interchangeability Rover position update rate Rover maximum range from base radio Rover operation within a VRS network Heading and Moving Base operation
Indian Institute of Technology Kanpur Department of Civil Engineering
 Indian Institute of Technology Kanpur Department of Civil Engineering Inquiry No- CE/JNM/2013-14/R-10 30 December, 2013 Subject: Quotation for supply of Integrated System/Smart System Reflectorless Robotic
Indian Institute of Technology Kanpur Department of Civil Engineering Inquiry No- CE/JNM/2013-14/R-10 30 December, 2013 Subject: Quotation for supply of Integrated System/Smart System Reflectorless Robotic
Tema tumedad ained. Teine raamat INGLITE TORN. Inglise keelest tõlkinud Eve Laur
 Tema tumedad ained Teine raamat INGLITE TORN Inglise keelest tõlkinud Eve Laur Originaal: THE SUBTLE KNIFE HIS DARK MATERIALS by PHILIP PULLMAN THE SUBTLE KNIFE Copyright 1997 by Philip Pullman Cover image
Tema tumedad ained Teine raamat INGLITE TORN Inglise keelest tõlkinud Eve Laur Originaal: THE SUBTLE KNIFE HIS DARK MATERIALS by PHILIP PULLMAN THE SUBTLE KNIFE Copyright 1997 by Philip Pullman Cover image
INNOVATSIOONI ESINEMINE TEENUSTES AS SAMREIS EESTI NÄITEL
 TARTU ÜLIKOOL Majandusteaduskond Rahvamajanduse instituut Piret Hanson INNOVATSIOONI ESINEMINE TEENUSTES AS SAMREIS EESTI NÄITEL Bakalaureusetöö Juhendaja: lektor Diana Eerma Tartu 2012 Soovitan suunata
TARTU ÜLIKOOL Majandusteaduskond Rahvamajanduse instituut Piret Hanson INNOVATSIOONI ESINEMINE TEENUSTES AS SAMREIS EESTI NÄITEL Bakalaureusetöö Juhendaja: lektor Diana Eerma Tartu 2012 Soovitan suunata
MGA Webinar Series : 1 Very Cheap RTK Receivers: Changing the Landscape of Positioning Services
 MGA Webinar Series : 1 Very Cheap RTK Receivers: Changing the Landscape of Positioning Services Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp
MGA Webinar Series : 1 Very Cheap RTK Receivers: Changing the Landscape of Positioning Services Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp
Assessment of GNSS Ionospheric Scintillation and TEC Monitoring Using the Multi-constellation GPStation-6 Receiver
 Assessment of GNSS Ionospheric Scintillation and TEC Monitoring Using the Multi-constellation GPStation-6 Receiver Rod MacLeod Regional Manager Asia/Pacific NovAtel Australia Pty Ltd Outline Ionospheric
Assessment of GNSS Ionospheric Scintillation and TEC Monitoring Using the Multi-constellation GPStation-6 Receiver Rod MacLeod Regional Manager Asia/Pacific NovAtel Australia Pty Ltd Outline Ionospheric
LIBATEADUSE ANATOOMIAST JA TAKSONOOMIAST
 LIBATEADUSE ANATOOMIAST JA TAKSONOOMIAST SISSEJUHATUS See oli 29-ndal juulil 1865; Nephtali André oli lõpetanud oma ülikooliõpingud ja oli merereisul. Prantsusmaa ja Alžiiri vahel lagedal merel kuuleb
LIBATEADUSE ANATOOMIAST JA TAKSONOOMIAST SISSEJUHATUS See oli 29-ndal juulil 1865; Nephtali André oli lõpetanud oma ülikooliõpingud ja oli merereisul. Prantsusmaa ja Alžiiri vahel lagedal merel kuuleb
OpenAIRE2020 uuel perioodil uue hooga
 Elena Sipria-Mironov TÜ raamatukogu OpenAIRE2020 uuel perioodil uue hooga Mäluasutuste talveseminar, 3. 4. märts 2015, Otepää Mis on OpenAIRE? E-taristu EL poolt rahastatud teadustulemuste hoidmiseks ja
Elena Sipria-Mironov TÜ raamatukogu OpenAIRE2020 uuel perioodil uue hooga Mäluasutuste talveseminar, 3. 4. märts 2015, Otepää Mis on OpenAIRE? E-taristu EL poolt rahastatud teadustulemuste hoidmiseks ja
Innovation, product development and patents at universities
 Estonian Journal of Engineering, 213, 19, 1, 4 17 doi: 1.3176/eng.213.1.2 a Innovation, product development and patents at universities Raul Kartus a and Ants Kukrus b Estonian Patent Office, Toompuiestee
Estonian Journal of Engineering, 213, 19, 1, 4 17 doi: 1.3176/eng.213.1.2 a Innovation, product development and patents at universities Raul Kartus a and Ants Kukrus b Estonian Patent Office, Toompuiestee
Originaali tiitel: David Nicholls One Day First published in 2009
 1 Originaali tiitel: David Nicholls One Day First published in 2009 Toimetanud Kirsti Sinissaar Copyright David Nicholls 2009 Tõlge eesti keelde. Triin Tael, 2011 ISBN 978-9985-3-2377-9 Kirjastus Varrak
1 Originaali tiitel: David Nicholls One Day First published in 2009 Toimetanud Kirsti Sinissaar Copyright David Nicholls 2009 Tõlge eesti keelde. Triin Tael, 2011 ISBN 978-9985-3-2377-9 Kirjastus Varrak
Originaali tiitel: 1001 Inventions That Changed the World
 Originaali tiitel: 1001 Inventions That Changed the World A Quintessence Book Esmatrükk Suurbritannias 2009. aastal Cassell Illustrated Octopus Publishing Group Limited 2 4 Heron Quays, London E14 4JP
Originaali tiitel: 1001 Inventions That Changed the World A Quintessence Book Esmatrükk Suurbritannias 2009. aastal Cassell Illustrated Octopus Publishing Group Limited 2 4 Heron Quays, London E14 4JP
TEEDEEHITUSES KASUTATUD BITUUMENID, EMULSIOONID JA KILLUSTIKUD
 TEEDEEHITUSES KASUTATUD BITUUMENID, EMULSIOONID JA KILLUSTIKUD Consumption of bitumen, emulsions and crushed stones in the road industry Company Data ASFALTSEGUDE TOOTMINE Production of Asphalt Mixtures
TEEDEEHITUSES KASUTATUD BITUUMENID, EMULSIOONID JA KILLUSTIKUD Consumption of bitumen, emulsions and crushed stones in the road industry Company Data ASFALTSEGUDE TOOTMINE Production of Asphalt Mixtures
This document is a preview generated by EVS
 EESTI STANDARD EVS-EN 61023:2002 Maritime navigation and radiocommunication equipment and systems - Marine speed and distance measuring equipment (SDME) - Performance requirements - Methods of testing
EESTI STANDARD EVS-EN 61023:2002 Maritime navigation and radiocommunication equipment and systems - Marine speed and distance measuring equipment (SDME) - Performance requirements - Methods of testing
EESTI STANDARD EVS-EN ISO 286-2:2010
 EESTI STANDARD EVS-EN ISO 286-2:2010 Geometrical product specifications (GPS) - ISO code system for tolerances on linear sizes - Part 2: Tables of standard tolerance classes and limit deviations for holes
EESTI STANDARD EVS-EN ISO 286-2:2010 Geometrical product specifications (GPS) - ISO code system for tolerances on linear sizes - Part 2: Tables of standard tolerance classes and limit deviations for holes
LEGO Mindstorms EV3 robotiehitus Design Engineering Projects
 LEGO Mindstorms EV3 robotiehitus Design Engineering Projects Jaanuar 2015, Lasteveeb OÜ Käesolev õppevahend on litsentseeritud Creative Commons 3.0 Eesti litsentsiga (autorile viitamine, mitteäriline eesmärk,
LEGO Mindstorms EV3 robotiehitus Design Engineering Projects Jaanuar 2015, Lasteveeb OÜ Käesolev õppevahend on litsentseeritud Creative Commons 3.0 Eesti litsentsiga (autorile viitamine, mitteäriline eesmärk,
EESTI STANDARD EVS-ISO :2007
 EESTI STANDARD EVS-ISO 12642-1:2007 TRÜKITEHNOLOOGIA Sisendandmed neljavärvitrüki kirjeldamiseks Osa 1: Lähteandmete pakett (ISO 12642:1996+AC:2005) Graphic technology Input data for characterization of
EESTI STANDARD EVS-ISO 12642-1:2007 TRÜKITEHNOLOOGIA Sisendandmed neljavärvitrüki kirjeldamiseks Osa 1: Lähteandmete pakett (ISO 12642:1996+AC:2005) Graphic technology Input data for characterization of
HAJUSANDMETEGA ÜLESANNETE ROLL FÜÜSIKAÕPPE EFEKTIIVSUSE TÕSTMISEL
 HAJUSANDMETEGA ÜLESANNETE ROLL FÜÜSIKAÕPPE EFEKTIIVSUSE TÕSTMISEL Sissejuhatus Üldteada on fakt, et viimasel ajal on täppisteaduste populaarsus langenud nii Eestis kui ka mujal maailmas. Olukorda on aidanud
HAJUSANDMETEGA ÜLESANNETE ROLL FÜÜSIKAÕPPE EFEKTIIVSUSE TÕSTMISEL Sissejuhatus Üldteada on fakt, et viimasel ajal on täppisteaduste populaarsus langenud nii Eestis kui ka mujal maailmas. Olukorda on aidanud
Eellaetava õhkrelva projekteerimine
 MEHHAANIKAINSTITUUT Tootearenduse õppetool MES70LT Vitali Lopatnjuk Eellaetava õhkrelva projekteerimine Autor taotleb tehnikateaduse magistri akadeemilist kraadi 1 AUTORIDEKLARATSIOON Deklareerin, et käesolev
MEHHAANIKAINSTITUUT Tootearenduse õppetool MES70LT Vitali Lopatnjuk Eellaetava õhkrelva projekteerimine Autor taotleb tehnikateaduse magistri akadeemilist kraadi 1 AUTORIDEKLARATSIOON Deklareerin, et käesolev
PPS usable by timing applications via serial port emulation
 Timing & Navigation Module z051 USB GNSS Dongle with PPS* PPS usable by timing applications via serial port emulation * The Pulse Per Second (PPS) is an electrical signal that very precisely indicates
Timing & Navigation Module z051 USB GNSS Dongle with PPS* PPS usable by timing applications via serial port emulation * The Pulse Per Second (PPS) is an electrical signal that very precisely indicates
GPS-Aided INS Datasheet Rev. 2.3
 GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
GPS-Aided INS Datasheet Rev. 2.6
 GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
This document is a preview generated by EVS
 EESTI STANDARD EVS-EN 15302:2008 Raudteealased rakendused. Meetodid koonilisuse ekvivalendi määramiseks Railway applications - Method for determining the equivalent conicity EESTI STANDARDI EESSÕNA NATIONAL
EESTI STANDARD EVS-EN 15302:2008 Raudteealased rakendused. Meetodid koonilisuse ekvivalendi määramiseks Railway applications - Method for determining the equivalent conicity EESTI STANDARDI EESSÕNA NATIONAL
GPS / GNSS Receiver (G-Mouse) GT-901 is a compact, high performance, and low power consumption G-Mouse.
 GT-901 is a compact, high performance, and low power consumption G-Mouse.") GPS / GNSS Receiver (G-Mouse) 1. Product Information 1.1 Product Name : GT-901 1.2 Product Description: GT-901 is a compact, high performance, and low power consumption G-Mouse. It uses the chipset of
GPS / GNSS Receiver (G-Mouse) 1. Product Information 1.1 Product Name : GT-901 1.2 Product Description: GT-901 is a compact, high performance, and low power consumption G-Mouse. It uses the chipset of