LEGO Mindstorms EV3 robotiehitus Design Engineering Projects
|
|
|
- Clarence Morris
- 6 years ago
- Views:
Transcription



.")
1 LEGO Mindstorms EV3 robotiehitus Design Engineering Projects Jaanuar 2015, Lasteveeb OÜ Käesolev õppevahend on litsentseeritud Creative Commons 3.0 Eesti litsentsiga (autorile viitamine, mitteäriline eesmärk, jagamine samadel tingimustel). Õppevahendi valmistamist toetas HITSA

 Pakett installeerub mugavalt otse EV3 tarkvara Lobby sse vasakul")
2 LME Design Engineering Projects tegevuste pakett LEGO Mindstorms EV3 robootikakomplekti kasutuselevõtu kiirendamiseks on loodud robotiehituse digitaalne tegevuspakett nimega LME Design Engineering Projects (kood , ca 130 EUR) Pakett installeerub mugavalt otse EV3 tarkvara Lobby sse vasakul asuva menüü lõppu. 2



3 Robotiehituse kolm suunda Pakett sisaldab kokku 15 projekti, mis on jaotatud kolme kategooriasse: pane see liikuma; tee see targemaks; tee süsteem. Lisaks on paketis 31 ehitusideed, 6 põhimõistete selgitust, õpetajajuhend ja 7 lühivideot tegutsevatest tööstusrobotitest. 3

4 Insenertehniline protsess robotiehituses Insenertehniline protsess koosneb seitsmest etapist: 1. disaini visand; 2. ajurünnak; 3. parima lahenduse valimine; 4. lahenduse ehitamine ja programmeerimine; 5. testimine ja analüüsimine; 6. vaata üle ja muuda; 7. anna teistele teada :) 4

5 Pane see liikuma! Eesmärgiks on õppida disainima ja ehitama autonoomset robotit, mis liigub ja oskab mõõta oma distantsi ja kiirust. Lisaks oskab ta hakkama saada kaldpindadega ning raskete maastikutingimustega. Programmeerimisel kasutatakse mootori sisse ehitatud pöördeandureid. Pane see liikuma: rataste abil; ja näita kiirust; ilma ratasteta; mööda kaldpinda üles: piki etteantud trajektoori. 5
6 Rataste abil! Eesmärk on disainida, ehitada ja programmeerida robot, mis suudab liikuda: vähemalt 1 m; kasutada vähemalt 1 mootorit; kasutades liikumiseks rattaid; ja suudab näidata ekraanil oma liikumise kiirust. Selle ülesande lahendamiseks on antud paketis juhised, mis koosnevad: mootorite programmeerimise õpetusest, vahemaa mõõtmise õpetusest ja teemaga seonduvate ehitusideede andmisest. 6

7 Vahemaa mõõtmine Ratastel liikuva roboti poolt läbitava vahemaa saad arvutada, kui tead: rattapöörete arvu; ratta ümbermõõtu. Kuidas arvutada vahemaad? Läbitud vahemaa = rattapöörete arv * ratta ümbermõõt. Kuidas arvutada ratta ümbermõõtu? Ratta ümbermõõt = π * ratta diameeter = 3.14 * ratta diameeter Kuidas teada saada rattapöörete arvu? Suure mootori sees on pöördeandur, selle näidu kasutamine annabki vastuse. 7


8 Vahemaa mõõtmine: mudel ja programm Vaata videot: Ava Building Ideas Large motor and Wheel. Ehita see. Ava Make it Move With Wheels slaid nr 2 seest vali Measuring Distance slaid nr 2 ja......laadi alla ekraanil näha olev programm. Käivita. 8
, lülitab taustavalguse välja (5), võtab mootoriandurist sisendina pöörete arvu (6) ja annab selle väljundiks matemaatikablokki, kus toimub pöörete arvu")
9 Vahemaa mõõtmine: mudel ja programm Programmi selgitus: robot lülitab sisse nuppude kollase taustavalguse (1), nullib ära mootoripöörete anduri väärtuse (2), mängib lühikese heli (3), ootab 4 sekundit, et saaksid käega ratast pöörata (4), lülitab taustavalguse välja (5), võtab mootoriandurist sisendina pöörete arvu (6) ja annab selle väljundiks matemaatikablokki, kus toimub pöörete arvu korrutamine ratta ümbermõõduga 17,6 cm (7), matemaatikablokist võetakse sisend ja antakse see väljundiks ümardamisbokki (8), ümardamisblokist võetakse sisend ja antakse see väljundiks tekstiblokile, mis liidab tulemusele otsa "cm" (9), tekstiblokist võetakse sisend ja antakse see väljundiks ekraaniblokile, mis ütleb tulemuse ekraanile (10), robot ootab 5 sekundit enne programmi lõpetamist, et sa näitu näeksid (11). 9

10 Ja näita kiirust! Eesmärk on disainida, ehitada ja programmeerida robot, mis suudab liikuda ning: arvutada oma keskmise kiiruse; näidata ekraanil oma keskmist kiirust. Selle ülesande lahendamiseks on antud paketis juhised, mis koosnevad: mootorite programmeerimise ja matemaatika bloki kasutamise õpetusest, teemaga seonduvate ideede andmisest, ning kiiruse mõõtmise põhimõtetest. 10

11 Kiiruse mõõtmine Ratastel liikuva roboti kiiruse saad arvutada, kui tead: rattapöörete arvu; ratta ümbermõõtu; aega, kui kaua robot liikus. läbitud vahemaa = pöörded * ümbermõõt kiirus = vahemaa / aeg Kuidas teada saada, kui kaua robot liikus? Kasuta selleks taimeriblokki. 11


12 Kiiruse mõõtmine: mudel ja programm, 1/2 Vaata videot: Kasuta Building Ideas Large motor and Wheel. Ava Make it Move And Display Speed slaid nr 2 seest vali Measuring Speed slaid nr 2 Ava slaid nr 2 ja laadi alla ekraanil näha olev programm. Käivita. 12
, ootab 4 sekundit, et saaksid käega ratast pöörata (5), lülitab taustavalguse välja (6), võtab taimerist sisendina mõõdetud aja ja annab selle väljundiks matemaatikablokki")
13 Kiiruse mõõtmine: mudel ja programm, 2/2 Programmi selgitus: robot lülitab sisse kollase nuppude taustavalguse (1), nullib ära taimer nr 1 väärtuse (2), nullib ära mootoripöörete anduri väärtuse (3), mängib lühikese heli (4), ootab 4 sekundit, et saaksid käega ratast pöörata (5), lülitab taustavalguse välja (6), võtab taimerist sisendina mõõdetud aja ja annab selle väljundiks matemaatikablokki (7), võtab mootoriandurist sisendina pöörete arvu (8) ning annab selle väljundiks matemaatikablokki, kus toimub mootoripöörete arvu korrutamine ratta ümbermõõduga 17,6 cm ja jagamine möödunud ajaga (9), matemaatikablokist võetakse sisend ja antaks see väljundiks ümardamisbokki (19), ümardamisblokist võetakse sisend ja antakse see väljundiks tekstiblokile, mis liidab tulemusele otsa cm/s (11), tekstiblokist võetakse sisend ja antakse see väljundiks ekraaniblokile, mis ütleb tulemuse ekraanile (12), robot ootab 5 sekundit enne programmi lõpetamist, et sa näitu näeksid (13). 13


14 Ilma ratasteta! Eesmärk on disainida, ehitada ja programmeerida robot, mis suudab liikuda: vähemalt 30 cm; kasutada vähemalt 1 mootorit; ja ei kasuta liikumiseks rattaid. Selle ülesande lahendamiseks on antud paketis juhised, mis koosnevad: mootorite programmeerimise õpetusest, teemaga seonduvate ehitusideede andmisest, sh kahte erinevat sorti jalad. 14


15 Ehita liikuv kahejalgne putukas Vaata videot: no Vaata Building Ideas Leg 1 või Building Ideas Leg 2. Ehita 2 jalga ja ühenda need ühendajatega aju külge. Ehita oma roboti kaunistuseks ja toetamiseks veel 2 jalga: Building Ideas Leg 3. Tee lihtne programm, mis liigutab robotit edasi 15 sekundit. 15

16 Kaldpinnast üles! Eesmärk on disainida, ehitada ja programmeerida robot, mis suudab iseseisvalt liikuda üles võimalikult järsust kaldpinnast. Selle ülesande lahendamiseks on antud paketis juhised, mis koosnevad: mootorite programmeerimise õpetusest, teemaga seonduvate ehitusideede andmisest, sealhulgas: hammaratas lahendustest, mis muudavad kiiruse jõuks, ja väiksemate rataste kasutamisest. 16
 lahenduses kannad liikumise 12 hambaga hammasrattalt üle 36 hambaga hammasrattale, mille tulemusena juhitav hammasratas teeb ühe ringi, samal ajal kui juhtiv hammasratas teeb")
 lahenduses kannad liikumise 24 hambaga hammasrattalt üle 8 hambaga hammasrattale, mille tulemusena juhitav hammasratas teeb kolm ringi, samal ajal kui juhtiv hammasratas teeb ühe")
17 Ehita kiirendavad / aeglustavad ehk Gear Down / Gear Up rattad Vaata Building Ideas Gear Down ja Building Ideas Gear Up, kuidas muuta kiirus jõuks ja vastupidi. Ehita mõlemad rattalahendused. Gear Down (aeglustav) lahenduses kannad liikumise 12 hambaga hammasrattalt üle 36 hambaga hammasrattale, mille tulemusena juhitav hammasratas teeb ühe ringi, samal ajal kui juhtiv hammasratas teeb kolm ringi. Gear Up (kiirendav) lahenduses kannad liikumise 24 hambaga hammasrattalt üle 8 hambaga hammasrattale, mille tulemusena juhitav hammasratas teeb kolm ringi, samal ajal kui juhtiv hammasratas teeb ühe ringi. Ühenda aju külge ja tee väga lihtne programm, kus kasutad lihtsalt ühte Move Steering blokki On For Seconds ja 15 sekundit. Jälgi, kuidas rattad liiguvad erineva kiirusega, kuigi mõlemad mootorid on sama võimsusega. Kumma lahendusega on lihtsam järsust kaldpinda üles ronida? Vaata videot: 17

18 Piki etteantud trajektoori! Eesmärk on disainida, ehitada ja programmeerida robot, mis suudab iseseisvalt liikuda mööda etteantud trajektoori, millel on korratav kuju, näiteks kolmnurk või ruut. Selle ülesande lahendamiseks on antud paketis juhised, mis koosnevad: mootorite programmeerimise õpetusest, sh: liikumine koos pööramisega ning tegevuse kordamine; teemaga seonduvate ehitusideede andmisest. 18



19 Ehita roomikud! Vaata Building Ideas Tracks. Ehita kaks roomikut, ühenda need aju külge ja tee lihtne programm, mis sõidab võrdkülgse kolmnurgakujulist trajektoori kaks korda läbi. Enne pööret sõidab robot edasi kolm rattapööret. Roomikute ühendamiseks aju põhja alla kasuta raame ja ühenduspulkasid. Vaata videot: NB! Roboti ehitus ja programmi kood tuleb viia vastama. Näiteks mõjutab roomikute omavaheline kaugus pööramiseks vajalike pöördekraadide arvu. Arvuta ja katseta! Mootorikraadide ja pööramiskraadide vaheline seos: Selleks, et arvutada, kui palju mootorikraade tuleb programmeerida robot pöörama, et saavutada kindla pööramiskraadidega paigalpööre, pead teadma roboti pöörderaadiust. Pöörderaadius võrdub ratta pöördediameetri (rataste keskpunktide vaheline kaugus) ja pii korrutisega. 19

20 Tee see targemaks! Eesmärgiks on õppida disainima ja ehitama autonoomset robotit, mis reageerib keskkonnale. Programmeerimisel kasutatakse värvi, güro, puute ja kaugusandurit. Tee see targemaks: lisa andureid; muuda kiiremaks; kohanemisvõimelisemaks; suhtlemisvõimelisemaks; tervisekesksemaks. 20

21 Anduri abil! Eesmärk on disainida, ehitada ja programmeerida robot, mis suudab tajuda keskkonda ning reageerida: tehes häält; või kasutades ekraaninuppude taustavalgust; või näidates midagi ekraanile. 21

22 Anduri abil: Graafikuga programmeerimine 1/5 Graafikuga programmeerimine võimaldab reaalajas andurilt saadud näitude põhjal käivitada erinevaid programme sõltuvalt sellest, kuhu kolmest määratud piirkonnast anduri näit on jõudnud. Vaata videot: PDxEKgY Vali Make It Smarter With Sensor slaid nr 1 pealt Graph Programming. Ühenda oma liikumisvõimelise roboti, näiteks Driving Base või just ehitatud tank, külge kaugusandur. Kasuta objektiks värvikuubikut Cuboid. Ühenda aju arvutiga ja liigu slaidile nr 4. Võrdle, kas ekraani all vasakus nurgas on sama häälestus kui slaidil toodud. Vajadusel vii häälestus vastavusse eemaldades üleliigsed andurid ja seades mõõdikud vastavusse. 22



23 Anduri abil: Graafikuga programmeerimine 2/5 Muuda Y telje skaala maksimaalselt 40 cm kõrguseks. Mine selleks vasakule üles maksimaalse väärtuse peale ja sisesta oma väärtus. Kui sisestamine ei õnnestu, siis leia y teljel ülesse valged üles alla nooled ja kliki nende pealt maksimaalne skaala enne muutma asumist lahti. Lülitu graafikuga programmeerimisele. Avaneb spetsiaalne aken, kus saame ära määrata kolm erinevat vahemikku (täht, ristkülik, ring). 23




24 Anduri abil: Graafikuga programmeerimine 3/5 Kliki joonisel näidatud tähele ja ristkülikule, et ekraanile tekiks oranž joon, mis tähistab graafiku piirkonna piirjooni. Tähe ülemine piir oli eelnevalt määratud 40, märgi alumiseks piiriks käsitsi 20 (see on ühtlasi ristküliku vahemiku ülemiseks piiriks). Kliki ringil, et määrata kõige alumise vahemiku sensori piirjoone ülemine väärtus. Märgi käsitsi 10 (see on ühtlasi risttküliku vahemiku alumiseks piiriks). 24




25 Anduri abil: Graafikuga programmeerimine 4/5 Liigu tagasi tähele, et avada graafikuga programmeerimise palett. Kliki paleti valgele alale ja tee järgi slaidil näidatud programm vastava häälestusega, kus mootor on On võimsusega 40 ja aju taustavalguse väärtus on nullitud. Nüüd liigu ristküliku sektsiooni ja tee järgi slaidil näidatud programm, kus määratakse ajule kollane taustavalgus. 25




26 Anduri abil: Graafikuga programmeerimine 5/5 Viimaseks liigu ringi sektsiooni ja tee järgi slaidil näidatud programm, kus mootor on On võimsusega 40 ja aju taustavalguse väärtus on nullitud. Nüüd oled kindlaks määranud, kuidas käitub robot erinevates tsoonides, kuhu ta liikudes jõuab. Pane robot värvikuubikust umbes 40 cm kaugusele. Laadi programm koos käivitusega. Jälgi ekraani. Korda eksperimenti. Vanu eksperimendigraafikuid saad ära kustutada Undo nupuga. 26

27 Kiiremaks! Eesmärk on disainida, ehitada ja programmeerida robot, mis tajub keskkonda; reageerib sellele liikumisega. 27

28 Kiiremaks: Andurid ja tunnetamine Võta aega uurida, kuidas roboti meeled, mis on andurite poolt tekitatud, sarnanevad või erinevad elusolendite omale: värviandur tunnetab erinevaid valgusi ja peegeldunud valgustugevust; güroandur tunnetab pööramist ja tasakaalu; puuteandur tunnetab teisi objekte läbi otsese kontakti; pöördeandur tunnetab mootori pöördeid ja suunda; kaugusandur tajub objekte vahemaa tagant. 28
, oota (2), korda (3), lülita (4), katkesta kordus (5).")
29 Kiiremaks: Roboti loogika Roboti käitumisloogika tuleneb robotit juhtivast programmist. Kõik sellised käsud on ära toodud oranžis paletis: alusta (1), oota (2), korda (3), lülita (4), katkesta kordus (5). Kasutatakse ka ja, või, kui nii, siis nii tingimusi. 29

30 Ja kohanemisvõimelisemaks! Eesmärk on disainida, ehitada ja programmeerida robot, mis tajub keskkonna heledus ja tumedustingimusi; reageerib igale tingimusele erineva käitumusega; ja luua süsteem, mis loob roboti käitumisest ja tingimustest graafikuid. 30


31 Kohanemisvõimelisemaks: Andmete kogumine Data Logging blokk oskab korjata kokku andmeid, mida erinevad andurid reaalajas toodavad. Andmed kogutakse failidesse, mida saab hiljem tarkvaras graafiliselt esitada. Sul on võimalik teha ka reaalajas eksperimente ja näha nende kohest esitust ekraanil. 31
32 Suhtlemisvõimelisemaks! Eesmärk on disainida, ehitada ja programmeerida robot, mis oskab tõlgendada vähemalt kahte sinult tulevat signaali; reageerida igale signaalile erineva käitumisega; anda signaali, millele sina saad reageerida. 32

33 Tervisekesksemaks! Eesmärk on disainida, ehitada ja programmeerida robot, mis oskab "tunnetab" toitu ja liigub, et seda saada; anda ekraanil oma liikumise kohta tagasisidet, kuvades andurite näite; ja "sureb", kui robot ei saa süüa või seisab ainult paigal. 33

34 Tee süsteem! Eesmärgiks on õppida disainima ja ehitama robootilist süsteemi, mis suudab täita keerukaid ülesandeid. Pane disaini kirjeldusse kirja, milliseid ülesandeid süsteem peab täitma ja kasuta allsüsteeme väiksemate "käitumiste" kirjeldamiseks, et kogu kirjelduses toodud süsteemi töö oleks täpne ja usaldusväärne. Tee süsteem, mis liigutab palli; korjab ja asetab; toodab; sorteerib värve; suhtleb. 34

35 Liigutab palli! Eesmärk on disainida, ehitada ja programmeerida robootiline süsteem, mis liigutab palli 90 kraadi ühest kohast teise. 35
36 Korjab ja asetab! Eesmärk on disainida, ehitada ja programmeerida robootiline süsteem, mis suudab värvikuubiku üles korjata ja teisaldada selle ühest kohast teise. 36

37 Toodab! Eesmärk on disainida, ehitada ja programmeerida robootiline süsteem, mis oskab joonistada kujundi, teostada selle täpselt ja seda korrata. 37
 või suletud (alumine).")
38 Allsüsteemid Robotid on tihti keerukad süsteemid, mis koosnevad mitmetest allsüsteemidest. Süsteemid saavad olla avatud (ülemine) või suletud (alumine). 38

39 Sorteerib värve! Eesmärk on disainida, ehitada ja programmeerida robootiline süsteem, mis oskab eristada vähemalt kolme erinevat sorti LEGO elemente ja neid sorteerida. 39

40 Suhtleb! Eesmärk on disainida, ehitada ja programmeerida robootiline süsteem, mis jälgib etteantud rada ning annab selle läbimisel vähemasti kaks korda oma positsioonist teada. 40


41 31 ehitusideed! Tegevuspakett pakub Sulle 31 erinevat ehitusideed, mis on algajale robotidisainerile suureks abiks oma ehituslike ideede teostamisel. 41

42 1. EV3 raamid EV3 raamide lisamine annab ajule juurde kinnitusauke nii horisontaalselt kui ka vertikaalselt. Nii saad lihtsalt ja kiirelt kinnitada mootoreid, andureid ja erinevaid talasid. 42

43 2. Pallihoidja nr 1 Pallihoidja nr 1 on kasuks, kui: soovid hoida teraspalli oma laual nii, et see maha ei kukuks; tahad hoida teraspalli roboti peal, kui see alustab liikumist või siis kohana, kuhu teraspall kinni püüda. 43

44 3. Pallihoidja nr 2 Pallihoidja nr 2 on kasuks, kui: soovid hoida teraspalli oma laual nii, et see maha ei kukuks; tahad hoida teraspalli roboti peal, kui see alustab liikumist või siis kohana, kuhu teraspall kinni püüda. 44

45 4. Pallratas Kasuta pallratast, et lisada robotile stabiilsust ja vähendada liikumise ajal hõõrdumist. Pallratas on disainitud nii, et seda oleks väga lihtne aju külge ühendada. 45
46 5. Kaldhammastega hammasrattad Kasutades kaldhammastega hammasrattaid saad mootori liikumist üle kanda 90 kraadise nurgaga. 12 hambaga juhthammasratas annab liikumise üle juhitavale 20 hambaga hammasrattale, vähendades juhitava hammasratta kiirust suhtega 12:20. 46

47 6. Kinnipüüdja Kasuta kinnipüüdjat teraspalli või mõne muu objekti kinnipüüdmiseks ja seejärel selle kahesuunaliseks liigutamiseks: ülesse alla või vasakule paremale sõltuvalt keskmise mootori asukohast. 47
48 7. Renn Kasuta renni värvikuubikute hoidmiseks ja ühekaupa jaotamiseks. Renn kasutab keskmist mootorit ja nn "nukki", mis lükkab klotse ühekaupa renni põhja. Kui kõige alumine värvikuubik välja kukub, lükkab raskusjõud järgmise värvikuubiku renni põhja. 48

49 8. Värvisensor 1 Kasuta seda raamiga lahendust värvisensori aju külge kinnitamiseks suunaga üles või alla. 49

50 9. Värvisensor 2 Kasuta seda lahendust värvisensori kinnitamiseks aju külge suunaga üles või alla. 50

51 10. Värviruudud Värviruutusid saab kasutada mitmeks erinevaks otstarbeks: hoida neid värvisensori ees või paigutada neid erinevatesse kohtadesse värvisensori aktiveerimiseks; kasutada neid mudeli kaunistamiseks või värvisensori aktiveerimiseks; ehitada neist mitmevärviline kuubik; libistada neid ühekaupa välja jaotamiseks rennist alla. 51
52 11. Värvikuubik Kasuta värvikuubikut, kui objekti, mida: robot saab ülesse tõsta, liigutada ja maha asetada; kasutada värvianduri aktiveerimiseks; kasutada kuubiku värve orientiirideks koha määramisel; otsida või vältida kasutades kaugusanduri võimalusi. 52

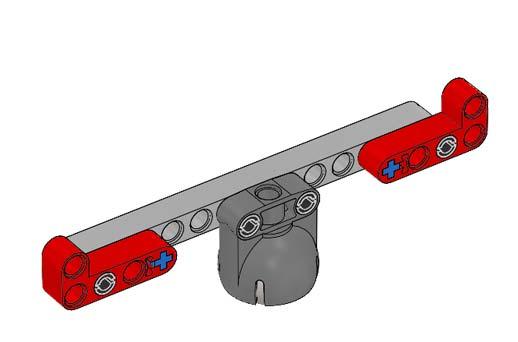
53 12. Silm Kasuta silma oma roboti dekoreerimiseks. EV3 põhikomplektist saab ehitada 2 silma. Paiguta neid horisontaalselt või vertikaalselt. Koos talaga saab silma kasutada ka teraspalli hoidjana. 53

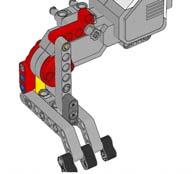
54 13. Jalg Kasuta jalga oma roboti dekoreerimiseks. Kahte jalga saab kasutada seisva EV3 roboti toetamiseks. 54

55 14. Aeglustav ülekanne Gear Down lahenduses kannad liikumise 12 hambaga hammasrattalt üle 36 hambaga hammasrattale, mille tulemusena juhitav hammasratas teeb ühe ringi, samal ajal kui juhtiv hammasratas teeb kolm ringi. Suhe on 1:3. 55
56 15. Kiirendav ülekanne Gear Up lahenduses kannad liikumise 24 hambaga hammasrattalt üle 8 hambaga hammasrattale, mille tulemusena juhitav hammasratas teeb kolm ringi, samal ajal kui juhtiv hammasratas teeb ühe ringi. Suhe on 3:1. 56

57 16. Haaraja Kasuta haarajat objektide haaramiseks ja haardest vabastamiseks. Suur mootor kontrollib haaratsite avamist ja sulgemist. Kui mootor pöörleb, kantakse see üle kolmele pöördepunktile, mille tulemusena tekib jõuõlg, mis rakendab jõudu fikseeritud talade suunas. Mootori pöörlemise ülekandmist horisontaalseks liikumiseks kutsutakse edasitagasi liikumiseks 57

58 17. Güroandur Kasuta seda lahendust ühendajate abiga güroanduri üles või alla suunaga aju külge paigutamiseks. 58

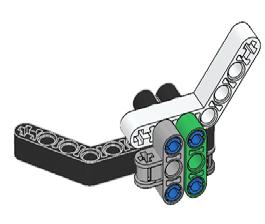
59 18. Suu Keskmine mootor juhib suu avamist ja sulgemist. Hammasrattasüsteem pidurdab mootorit ning hoiab suu suletuna või avatuna. 59

60 19. Suur mootor ja ühendaja Kasuta sellist lahendust mootori kinnitamiseks otse aju või raami või mõne tala külge. 60
61 20. Suur mootor ja ratas See on näide, kuidas ühendada ratas võlli abil otse mootori südamiku otsa. Sellise lahenduse puhul liigub ratas sama arvu pöördeid kui mootor. 61

62 21. Jalg nr 1 Selle lahendusega saad mootori pöördliikumise muuta tasapinnaliseks edasi tagasi liikumiseks, nagu see jalgade puhul ikka käib. 62
63 22. Jalg nr 2 Selle lahendusega saad mootori pöördliikumise muuta tasapinnaliseks edasi tagasi liikumiseks, nagu see jalgade puhul ikka käib. Võrreldes jalaga nr 1 liigub jalg nr 2 90 kraadise nurga all. 63
64 23. Jalg nr 3 Kasuta neid jalgu oma roboti kaunistamiseks. Põhikomplektist saad ehitada kuni 4 sellist jalga. Samuti saad neid kasutada näiteks tiibadena. 64

65 24. Pliiatsihoidja Kasuta pliiatsihoidjat koos pastaka, pliiatsi või peenikese markeriga. Pliiatsihoidja on disainitud kiiresti ja lihtsalt ühenduma erinevate taladega. Seda saab kinnitada nii horisontaalselt kui ka vertikaalselt. Keera väljaulatuvat punast pikendajat pliiatsi kinnitamiseks või vabastamiseks. 65

66 25. Kaldtee Kasuta kaldteed, et juhtida teraspalli või muid objekte. Kaldtee kalle on umbes 20 kraadi. 66

67 26. Tõstelint Kasuta tõstelinti tugeva, kuid liikuva konstruktsioonina, mille abil tõsta või langetada lisatud objekte. Suur mootor kontrollib tõstmise või langetamise suunda. 67
68 27. Saba Kasuta saba oma roboti kaunistamiseks. Sobib ka tiivaks või leheks. 68

69 28. Puuteandur Kasuta seda lahendust ühendajate abiga puuteanduri üles või allasuunaga aju külge paigutamiseks. 69
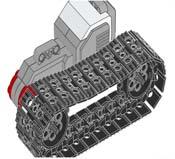
70 29. Roomikud Kasuta roomikuid, et jaotada roboti mass suuremale pindalale. Põhikomplektist saad moodustada ühe paari roomikuid. Ratas kinnitub võlliga otse mootori külge. 70

71 30. Pöördplatvorm Pöördplatvorm kasutab suurt mootorit ja väikest pöördplatvormi elementi koos hammasrataste ja taladega. 71

72 31. Kaugusandur Kinnita kaugusandur horisontaalselt või vertikaalselt kahe telje abil. 72
73 Palju õnne! Oled läbi käinud robotidisaini põhilised punktid ja saanud palju uusi ehitusideid, mida iseseisvalt koos tegevuspaketis toodud ehitusjuhistega katsetada. Huvitavaid mõtteid uute robotite väljamõtlemiseks ning nende programmeerimiseks! 73
Survey Pro 4.8 GPS/GNSS juhend
 GPS/GNSS liikuvjaama mõõtmise alustamine Select RTK Rover: vali liikuvjaama seade. Select Networks: vali kasutatav püsijaam või võrk (eelnevalt seadistatud). Ühenda GNSS seadme ja võrguga. Antenna Type:
GPS/GNSS liikuvjaama mõõtmise alustamine Select RTK Rover: vali liikuvjaama seade. Select Networks: vali kasutatav püsijaam või võrk (eelnevalt seadistatud). Ühenda GNSS seadme ja võrguga. Antenna Type:
Arvude edastamine raadiosides. 1. Numbrite edastamine Numbrite edastamisel kasutatakse järgmist hääldust, rõhutades allajoonitud silpi.
 Majandus- ja kommunikatsiooniministri 8.03.2011. a määruse nr 20 Lennunduse raadioside reeglid lisa 2 Arvude edastamine raadiosides 1. Numbrite edastamine Numbrite edastamisel kasutatakse järgmist hääldust,
Majandus- ja kommunikatsiooniministri 8.03.2011. a määruse nr 20 Lennunduse raadioside reeglid lisa 2 Arvude edastamine raadiosides 1. Numbrite edastamine Numbrite edastamisel kasutatakse järgmist hääldust,
Licence to learn. Karel Zova , Olustvere
 Licence to learn Karel Zova 7.11.2013, Olustvere Autoriõigused Tekivad teose loomisel Autoril pole kohustust registreerida, märkida vms Autorsuse presumptsioon Jagunevad isiklikeks ja varalisteks Autoriõigused
Licence to learn Karel Zova 7.11.2013, Olustvere Autoriõigused Tekivad teose loomisel Autoril pole kohustust registreerida, märkida vms Autorsuse presumptsioon Jagunevad isiklikeks ja varalisteks Autoriõigused
7. Kanalikiht II. Side IRT3930 Ivo Müürsepp
 7. Kanalikiht II Side IRT393 Ivo Müürsepp CSMA/CD Kuula, kas keegi teine edastab (meedium vaba?). Kui meedium on vaba, siis edasta kaader. Kui meedium ei ole vaba, siis kuula edasi. Alusta kaadri edastamist
7. Kanalikiht II Side IRT393 Ivo Müürsepp CSMA/CD Kuula, kas keegi teine edastab (meedium vaba?). Kui meedium on vaba, siis edasta kaader. Kui meedium ei ole vaba, siis kuula edasi. Alusta kaadri edastamist
IRZ0190 Kanalikodeerimine telekommunikatsioonis. Julia Berdnikova julia.berdnikova [ät] ttu.ee Sander Ulp sander.ulp [ät] ttu.ee
![IRZ0190 Kanalikodeerimine telekommunikatsioonis. Julia Berdnikova julia.berdnikova [ät] ttu.ee Sander Ulp sander.ulp [ät] ttu.ee](/thumbs/75/72452435.jpg "IRZ0190 Kanalikodeerimine telekommunikatsioonis. Julia Berdnikova julia.berdnikova [ät] ttu.ee Sander Ulp sander.ulp [ät] ttu.ee") IRZ0190 Kanalikodeerimine telekommunikatsioonis Julia Berdnikova julia.berdnikova [ät] ttu.ee Sander Ulp sander.ulp [ät] ttu.ee 1 IRZ0190 Kanalikodeerimine telekommunikatsioonis Nädalatunnid: 2L+1P+1H
IRZ0190 Kanalikodeerimine telekommunikatsioonis Julia Berdnikova julia.berdnikova [ät] ttu.ee Sander Ulp sander.ulp [ät] ttu.ee 1 IRZ0190 Kanalikodeerimine telekommunikatsioonis Nädalatunnid: 2L+1P+1H
Swiss Manager. Kuremaa, Sten Kasela
 Swiss Manager Kuremaa, 2016. Sten Kasela Üldist http://swiss-manager.at FIDE ametlik programm Šveits : 1500 osalejat ja 23 vooru Ringsüsteem : 150 vooru Võistkondlik ringsüsteem: 1500 osalejat ja 50 võistkonda
Swiss Manager Kuremaa, 2016. Sten Kasela Üldist http://swiss-manager.at FIDE ametlik programm Šveits : 1500 osalejat ja 23 vooru Ringsüsteem : 150 vooru Võistkondlik ringsüsteem: 1500 osalejat ja 50 võistkonda
Algoritmide koostamise strateegiad
 Algoritmide koostamise strateegiad Algoritmide koostamise strateegiad (algorithmic paradigmas) on üldised põhimõtted sellest, kuidas konstrueerida tulemuslikke algoritme probleemide lahendamiseks. Miks
Algoritmide koostamise strateegiad Algoritmide koostamise strateegiad (algorithmic paradigmas) on üldised põhimõtted sellest, kuidas konstrueerida tulemuslikke algoritme probleemide lahendamiseks. Miks
Presenter SNP6000. Register your product and get support at ET Kasutusjuhend
 Register your product and get support at www.philips.com/welcome Presenter SNP6000 ET Kasutusjuhend 1 a b c d e 2 3 4 Federal Communication Commission Interference Statement This equipment has been tested
Register your product and get support at www.philips.com/welcome Presenter SNP6000 ET Kasutusjuhend 1 a b c d e 2 3 4 Federal Communication Commission Interference Statement This equipment has been tested
1. tund - Sissejuhatus robootikasse
 1. tund - Sissejuhatus robootikasse Tunni alustamine (1min) Videoklipp, milles robot Wall-E teeb kolme topsiga mustkunstitrikki. (http://www.youtube.com/watch?v=bs9dazazqao&feature=related, pealkiri: WallE
1. tund - Sissejuhatus robootikasse Tunni alustamine (1min) Videoklipp, milles robot Wall-E teeb kolme topsiga mustkunstitrikki. (http://www.youtube.com/watch?v=bs9dazazqao&feature=related, pealkiri: WallE
Dota 2 Workshop Tools õppematerjal kohandatud mängude loomiseks
 Tallinna Ülikool Digitehnoloogiate Instituut Dota 2 Workshop Tools õppematerjal kohandatud mängude loomiseks Bakalaureusetöö Autor: Sander Leetus Juhendaja: Jaagup Kippar Autor:...... 2017 Juhendaja:......
Tallinna Ülikool Digitehnoloogiate Instituut Dota 2 Workshop Tools õppematerjal kohandatud mängude loomiseks Bakalaureusetöö Autor: Sander Leetus Juhendaja: Jaagup Kippar Autor:...... 2017 Juhendaja:......
1. SAGEDUSMODULAATOR. Raadiotehnika laboratoorium RAADIO- JA SIDETEHNIKA INSTITUUT
 1. SAGEDUSMODULAATOR Raadiotehnika laboratoorium RAADIO- JA SIDETEHNIKA INSTITUUT Tallinn 2015 Infoedastusseadmete IRO 0050 laboratoorne töö Sagedusmodulaator Valminud Eesti Infotehnoloogia Sihtasutuse
1. SAGEDUSMODULAATOR Raadiotehnika laboratoorium RAADIO- JA SIDETEHNIKA INSTITUUT Tallinn 2015 Infoedastusseadmete IRO 0050 laboratoorne töö Sagedusmodulaator Valminud Eesti Infotehnoloogia Sihtasutuse
Rakenduste loomine programmi GameMaker abil
 Tallinna Ülikool Informaatika Instituut Rakenduste loomine programmi GameMaker abil Bakalaureusetöö Autor: Martin Kadarik Juhendaja: Andrus Rinde Autor:...... 2012 Juhendaja:...... 2012 Instituudi direktor:......
Tallinna Ülikool Informaatika Instituut Rakenduste loomine programmi GameMaker abil Bakalaureusetöö Autor: Martin Kadarik Juhendaja: Andrus Rinde Autor:...... 2012 Juhendaja:...... 2012 Instituudi direktor:......
Mängud on rohkem nagu juhtnöörid ja ideed, mida ette võtta projekti raames oma klassis.
 Kallis õpetaja, Siit leiad mõned ideed mängude ja ülesannete kohta õpilaste jaoks, kes osalevad kevad käes projektis. Need on koostatud nii, et saaksite kontollida õpilaste teadmisi. Mängud on rohkem nagu
Kallis õpetaja, Siit leiad mõned ideed mängude ja ülesannete kohta õpilaste jaoks, kes osalevad kevad käes projektis. Need on koostatud nii, et saaksite kontollida õpilaste teadmisi. Mängud on rohkem nagu
Marie Skłodowska-Curie individuaalgrandid. Tartu, 10. mai 2016 Kristin Kraav
 Marie Skłodowska-Curie individuaalgrandid Tartu, 10. mai 2016 Kristin Kraav kristin.kraav@etag.ee Tänane kava 9:30 12:30 töötame taotluse struktuuriga 12:30 13:30 lõunapaus 13:30 14:30 Kommunikatsioon
Marie Skłodowska-Curie individuaalgrandid Tartu, 10. mai 2016 Kristin Kraav kristin.kraav@etag.ee Tänane kava 9:30 12:30 töötame taotluse struktuuriga 12:30 13:30 lõunapaus 13:30 14:30 Kommunikatsioon
PINDALA MÄÄRAMINE GIS-GNSS-SEADMEGA NING ERINEVATE TEGURITE MÕJU TULEMUSELE
 EESTI MAAÜLIKOOL Metsandus- ja maaehitusinstituut Karin Sabalisk PINDALA MÄÄRAMINE GIS-GNSS-SEADMEGA NING ERINEVATE TEGURITE MÕJU TULEMUSELE AREA DESIGNATION GIS GNSS EQUIPMENT AND THE RESULT OF THE INFLUENCE
EESTI MAAÜLIKOOL Metsandus- ja maaehitusinstituut Karin Sabalisk PINDALA MÄÄRAMINE GIS-GNSS-SEADMEGA NING ERINEVATE TEGURITE MÕJU TULEMUSELE AREA DESIGNATION GIS GNSS EQUIPMENT AND THE RESULT OF THE INFLUENCE
Arduino stardikomplekti õppematerjalid
 TARTU ÜLIKOOL Arvutiteaduse instituut informaatika õppekava Selena Lubi Arduino stardikomplekti õppematerjalid Bakalaureusetöö (9 EAP) Juhendajad: Alo Peets, Taavi Duvin, Anne Villems Tartu 2016 Arduino
TARTU ÜLIKOOL Arvutiteaduse instituut informaatika õppekava Selena Lubi Arduino stardikomplekti õppematerjalid Bakalaureusetöö (9 EAP) Juhendajad: Alo Peets, Taavi Duvin, Anne Villems Tartu 2016 Arduino
Sissejuhatus Objekt-Orienteeritud (O-O) andmebaasidesse ja ülevaade andmemudelite ajaloost.
 andmebaasidesse ja ülevaade andmemudelite ajaloost.") Sissejuhatus Objekt-Orienteeritud (O-O) andmebaasidesse ja ülevaade andmemudelite ajaloost. Mõisted: O-O andmebaaside kohustuslikud omadused; OID, O-O paradigma mõisted O-O andmebaasides (kapseldamine,
Sissejuhatus Objekt-Orienteeritud (O-O) andmebaasidesse ja ülevaade andmemudelite ajaloost. Mõisted: O-O andmebaaside kohustuslikud omadused; OID, O-O paradigma mõisted O-O andmebaasides (kapseldamine,
Axial defect imaging in a pipe using synthetically focused guided waves
 Estonian Journal of Engineering, 2011, 17, 1, 66 75 doi: 10.3176/eng.2011.1.07 Axial defect imaging in a pipe using synthetically focused guided waves Madis Ratassepp a, Sam Fletcher b and Aleksander Klauson
Estonian Journal of Engineering, 2011, 17, 1, 66 75 doi: 10.3176/eng.2011.1.07 Axial defect imaging in a pipe using synthetically focused guided waves Madis Ratassepp a, Sam Fletcher b and Aleksander Klauson
OpenAIRE2020 uuel perioodil uue hooga
 Elena Sipria-Mironov TÜ raamatukogu OpenAIRE2020 uuel perioodil uue hooga Mäluasutuste talveseminar, 3. 4. märts 2015, Otepää Mis on OpenAIRE? E-taristu EL poolt rahastatud teadustulemuste hoidmiseks ja
Elena Sipria-Mironov TÜ raamatukogu OpenAIRE2020 uuel perioodil uue hooga Mäluasutuste talveseminar, 3. 4. märts 2015, Otepää Mis on OpenAIRE? E-taristu EL poolt rahastatud teadustulemuste hoidmiseks ja
Austame autorite õigusi
 Piret Joalaid: Seadus kaitseb automaatselt kõiki teoseid, ka neid, mille autorit pole märgitud. Austame autorite õigusi P i r e t J o a l a i d Ristiku põhikooli eesti keele ja kirjanduse vanemõpetaja,
Piret Joalaid: Seadus kaitseb automaatselt kõiki teoseid, ka neid, mille autorit pole märgitud. Austame autorite õigusi P i r e t J o a l a i d Ristiku põhikooli eesti keele ja kirjanduse vanemõpetaja,
Internetiturundus sotsiaalmeedia abil koeratoit.ee näitel
 Tallinna Ülikool Informaatika Instituut Internetiturundus sotsiaalmeedia abil koeratoit.ee näitel Bakalaureusetöö Autor: Tatjana Melnikova Juhendaja: Mart Laanpere Autor:...... 2011 Juhendaja:...... 2011
Tallinna Ülikool Informaatika Instituut Internetiturundus sotsiaalmeedia abil koeratoit.ee näitel Bakalaureusetöö Autor: Tatjana Melnikova Juhendaja: Mart Laanpere Autor:...... 2011 Juhendaja:...... 2011
Arvutimängude loomise võimalusi läbi Steam'i platvormi
 Tallinna Ülikool Digitehnoloogiate instituut Arvutimängude loomise võimalusi läbi Steam'i platvormi Seminaritöö Autor: Sander Eerik Sandrak Juhendaja: Martin Sillaots Autor:...... 2016 Juhendaja:......
Tallinna Ülikool Digitehnoloogiate instituut Arvutimängude loomise võimalusi läbi Steam'i platvormi Seminaritöö Autor: Sander Eerik Sandrak Juhendaja: Martin Sillaots Autor:...... 2016 Juhendaja:......
Hillar Põldmaa 20. september 2010
 SF programm Infoühiskonna teadlikkuse tõstmine Hillar Põldmaa 20. september 2010 Koolitused ja infopäevad toimuvad Euroopa Liidu struktuurifondide programmi Infoühiskonna teadlikkuse tõstmine raames, mida
SF programm Infoühiskonna teadlikkuse tõstmine Hillar Põldmaa 20. september 2010 Koolitused ja infopäevad toimuvad Euroopa Liidu struktuurifondide programmi Infoühiskonna teadlikkuse tõstmine raames, mida
Leader-follower System for Unmanned Ground Vehicle
 UNIVERSITY OF TARTU Institute of Computer Science Computer Science Curriculum Kristjan Jansons Leader-follower System for Unmanned Ground Vehicle Master s Thesis (30 ECTS) Supervisor: Tambet Matiisen,
UNIVERSITY OF TARTU Institute of Computer Science Computer Science Curriculum Kristjan Jansons Leader-follower System for Unmanned Ground Vehicle Master s Thesis (30 ECTS) Supervisor: Tambet Matiisen,
RTK GNSS MÕÕTMISTE STABIILSUS JA TÄPSUS ERINEVATES PÜSIJAAMADE VÕRKUDES
 EESTI MAAÜLIKOOL Metsandus- ja maaehitusinstituut Karel Kõre RTK GNSS MÕÕTMISTE STABIILSUS JA TÄPSUS ERINEVATES PÜSIJAAMADE VÕRKUDES RTK GNSS NETWORK MEASUREMENT STABILITY AND ACCURACY IN DIFFERENT REAL
EESTI MAAÜLIKOOL Metsandus- ja maaehitusinstituut Karel Kõre RTK GNSS MÕÕTMISTE STABIILSUS JA TÄPSUS ERINEVATES PÜSIJAAMADE VÕRKUDES RTK GNSS NETWORK MEASUREMENT STABILITY AND ACCURACY IN DIFFERENT REAL
TARTU SUVI, juuni 2018
 1. KOHT Eesti Rahva Muuseum, Muuseumi tee 2, Tartu 2. REGISTREERIMINE & AJAKAVA TARTU SUVI, 9. - 10. juuni 2018 Eraldi kiir- ja välkturniir Juhend Eelregistreerimine kuni 6. juunini 2018. Eelregistreerimine
1. KOHT Eesti Rahva Muuseum, Muuseumi tee 2, Tartu 2. REGISTREERIMINE & AJAKAVA TARTU SUVI, 9. - 10. juuni 2018 Eraldi kiir- ja välkturniir Juhend Eelregistreerimine kuni 6. juunini 2018. Eelregistreerimine
Roman Kulašenkov. Panoraamröntgenseadmete tunnussuurused ja patsiendidoos
 TARTU ÜLIKOOL LOODUS- JA TÄPPISTEADUSTE VALDKOND Füüsika Instituut Roman Kulašenkov Panoraamröntgenseadmete tunnussuurused ja patsiendidoos Füüsika õppekava bakalaureusetöö (12 EAP) Juhendaja(d): Kalle
TARTU ÜLIKOOL LOODUS- JA TÄPPISTEADUSTE VALDKOND Füüsika Instituut Roman Kulašenkov Panoraamröntgenseadmete tunnussuurused ja patsiendidoos Füüsika õppekava bakalaureusetöö (12 EAP) Juhendaja(d): Kalle
Tema tumedad ained. Teine raamat INGLITE TORN. Inglise keelest tõlkinud Eve Laur
 Tema tumedad ained Teine raamat INGLITE TORN Inglise keelest tõlkinud Eve Laur Originaal: THE SUBTLE KNIFE HIS DARK MATERIALS by PHILIP PULLMAN THE SUBTLE KNIFE Copyright 1997 by Philip Pullman Cover image
Tema tumedad ained Teine raamat INGLITE TORN Inglise keelest tõlkinud Eve Laur Originaal: THE SUBTLE KNIFE HIS DARK MATERIALS by PHILIP PULLMAN THE SUBTLE KNIFE Copyright 1997 by Philip Pullman Cover image
Ernest Hemingway VANAMEES JA MERI
 Ernest Hemingway VANAMEES JA MERI Inglise keelest tõlkinud Enn Soosaar TALLINN KIRJASTUS «EESTI RAAMAT» 1985 T (Ameerika) H4S Originaali tiitel: Ernest Hemingway THE OLD MAN AND THE SEA Charles Scribner's
Ernest Hemingway VANAMEES JA MERI Inglise keelest tõlkinud Enn Soosaar TALLINN KIRJASTUS «EESTI RAAMAT» 1985 T (Ameerika) H4S Originaali tiitel: Ernest Hemingway THE OLD MAN AND THE SEA Charles Scribner's
Self-teaching Gomoku player using composite patterns with adaptive scores and the implemented playing framework
 TALLINN UNIVERSITY OF TECHNOLOGY Information Technology Department of Computer Science Chair of Network Software Self-teaching Gomoku player using composite patterns with adaptive scores and the implemented
TALLINN UNIVERSITY OF TECHNOLOGY Information Technology Department of Computer Science Chair of Network Software Self-teaching Gomoku player using composite patterns with adaptive scores and the implemented
Haridustehnoloogia innovatsioonivõrgus2ke ja kogukondade näited. Mar$n Sillaots #5
 Haridustehnoloogia innovatsioonivõrgus2ke ja kogukondade näited Mar$n Sillaots 09.10.2016 #5 ? Mis vahe on võrgus$kul ja kogukonnal? Milline võrgus$k või kogukond on innovaa$line? Näited SEGAN EDRENE
Haridustehnoloogia innovatsioonivõrgus2ke ja kogukondade näited Mar$n Sillaots 09.10.2016 #5 ? Mis vahe on võrgus$kul ja kogukonnal? Milline võrgus$k või kogukond on innovaa$line? Näited SEGAN EDRENE
Võimatu geomeetria sõlmepõhises maailmas
 TARTU ÜLIKOOL Arvutiteaduse instituut Informaatika õppekava Ivo Voika Võimatu geomeetria sõlmepõhises maailmas Bakalaureusetöö (6 EAP) Juhendaja: Raimond-Hendrik Tunnel, MSc Tartu 2017 Võimatu geomeetria
TARTU ÜLIKOOL Arvutiteaduse instituut Informaatika õppekava Ivo Voika Võimatu geomeetria sõlmepõhises maailmas Bakalaureusetöö (6 EAP) Juhendaja: Raimond-Hendrik Tunnel, MSc Tartu 2017 Võimatu geomeetria
Patsiendidoosi hindamine ja kvaliteedimııtmised radioloogia kvaliteedis steemi osana. I Patsiendidoosi hindamine
 Patsiendidoosi hindamine ja kvaliteedimııtmised radioloogia kvaliteedis steemi osana I Patsiendidoosi hindamine Kalle Kepler Tartu likool, BMTK Kalle.Kepler@ut.ee Kvaliteedis steemi rakendamine meditsiiniradioloogias
Patsiendidoosi hindamine ja kvaliteedimııtmised radioloogia kvaliteedis steemi osana I Patsiendidoosi hindamine Kalle Kepler Tartu likool, BMTK Kalle.Kepler@ut.ee Kvaliteedis steemi rakendamine meditsiiniradioloogias
EESTI VABARIIK Republic of Estonia VARUSTUSE LOETELU RECORD OF EQUIPMENT
 Majandus- ja kommunikatsiooniministri 9. märtsi 2005. a määrus nr 30 Kohalikus rannasõidus sõitvate reisilaevade klassid, sõidupiirkonnad, ohutusnõuded ja ohutuse tunnistuse vorm Lisa 2 [RT I, 20.09.2013,
Majandus- ja kommunikatsiooniministri 9. märtsi 2005. a määrus nr 30 Kohalikus rannasõidus sõitvate reisilaevade klassid, sõidupiirkonnad, ohutusnõuded ja ohutuse tunnistuse vorm Lisa 2 [RT I, 20.09.2013,
GPS MOODULI REALISATSIOON JA ANALÜÜS SIRFSTAR IV KIIBI BAASIL Bakalaureuse lõputöö
 TALLINNA TEHNIKAÜLIKOOL Infotehnoloogia teaduskond Thomas Johann Seebecki elektroonikainstituut Siduselektroonika teaduslaboratoorium Kristjan Lužkov GPS MOODULI REALISATSIOON JA ANALÜÜS SIRFSTAR IV KIIBI
TALLINNA TEHNIKAÜLIKOOL Infotehnoloogia teaduskond Thomas Johann Seebecki elektroonikainstituut Siduselektroonika teaduslaboratoorium Kristjan Lužkov GPS MOODULI REALISATSIOON JA ANALÜÜS SIRFSTAR IV KIIBI
About Quality and Using of IKONOS Satellite Image in Estonia
 About Quality and Using of IKONOS Satellite Image in Estonia Ave KARGAJA, Ina MELNIKOVA, Natalja LIBA, Tarmo KALL and Taavi VEERMETS Estonia Key words: satellite image, geometric quality, geometric accuracy,
About Quality and Using of IKONOS Satellite Image in Estonia Ave KARGAJA, Ina MELNIKOVA, Natalja LIBA, Tarmo KALL and Taavi VEERMETS Estonia Key words: satellite image, geometric quality, geometric accuracy,
Sisukord. 1. Sensor AID Tutvustus. Eesti. 1. Sensor AID tutvustus. 4.1 Sensori ID kopeerimine Manuaalne ID modifitseerimine
 Eesti Sisukord 1. Sensor AID tutvustus 2. Sensori tuvastamine / tulemuste kirjeldus 3. Uus sensor 3.1 Automaatne duplikeerimine 3.2 Manuaalne duplikeerimine 3.3 Tühja sensori programeerimine 4. Uni-sensori
Eesti Sisukord 1. Sensor AID tutvustus 2. Sensori tuvastamine / tulemuste kirjeldus 3. Uus sensor 3.1 Automaatne duplikeerimine 3.2 Manuaalne duplikeerimine 3.3 Tühja sensori programeerimine 4. Uni-sensori
EESTI STANDARD EVS-ISO :2007
 EESTI STANDARD EVS-ISO 12642-1:2007 TRÜKITEHNOLOOGIA Sisendandmed neljavärvitrüki kirjeldamiseks Osa 1: Lähteandmete pakett (ISO 12642:1996+AC:2005) Graphic technology Input data for characterization of
EESTI STANDARD EVS-ISO 12642-1:2007 TRÜKITEHNOLOOGIA Sisendandmed neljavärvitrüki kirjeldamiseks Osa 1: Lähteandmete pakett (ISO 12642:1996+AC:2005) Graphic technology Input data for characterization of
Raspberry Pi based System for Visual Detection of Fluid Level
 Tallinn University of Technology Faculty of Information Technology Department of Computer Control Igor Petrov Raspberry Pi based System for Visual Detection of Fluid Level Bachelor s Thesis Supervisor(s):
Tallinn University of Technology Faculty of Information Technology Department of Computer Control Igor Petrov Raspberry Pi based System for Visual Detection of Fluid Level Bachelor s Thesis Supervisor(s):
TALLINNA PEDAGOOGIKAÜLIKOOL. GPS Global Positioning System
 TALLINNA PEDAGOOGIKAÜLIKOOL Matemaatika-loodusteaduskond Informaatika osakond Kelly Erin-Uussaar GPS Global Positioning System Proseminaritöö Juhendaja: Kalle Tabur Tallinn 2003 1 Sisukord Sisukord...2
TALLINNA PEDAGOOGIKAÜLIKOOL Matemaatika-loodusteaduskond Informaatika osakond Kelly Erin-Uussaar GPS Global Positioning System Proseminaritöö Juhendaja: Kalle Tabur Tallinn 2003 1 Sisukord Sisukord...2
HDR (High Dynamic Range) fototöötlusprogrammide võrdlus
 fototöötlusprogrammide võrdlus") Tallinna Ülikool Informaatika Instituut HDR (High Dynamic Range) fototöötlusprogrammide võrdlus Seminaritöö Autor: Tiina Mõniste Juhendaja: Kalle Kivi Tallinn 2011 Sisukord Sisukord... 2 Sissejuhatus...
Tallinna Ülikool Informaatika Instituut HDR (High Dynamic Range) fototöötlusprogrammide võrdlus Seminaritöö Autor: Tiina Mõniste Juhendaja: Kalle Kivi Tallinn 2011 Sisukord Sisukord... 2 Sissejuhatus...
This document is a preview generated by EVS
 EESTI STANDARD EVS-EN 61580-6:2013 Methods of measurement for waveguides -- Part 6: Return loss on waveguide and waveguide assemblies EESTI STANDARDI EESSÕNA NATIONAL FOREWORD See Eesti standard EVS-EN
EESTI STANDARD EVS-EN 61580-6:2013 Methods of measurement for waveguides -- Part 6: Return loss on waveguide and waveguide assemblies EESTI STANDARDI EESSÕNA NATIONAL FOREWORD See Eesti standard EVS-EN
Originaali tiitel: David Nicholls One Day First published in 2009
 1 Originaali tiitel: David Nicholls One Day First published in 2009 Toimetanud Kirsti Sinissaar Copyright David Nicholls 2009 Tõlge eesti keelde. Triin Tael, 2011 ISBN 978-9985-3-2377-9 Kirjastus Varrak
1 Originaali tiitel: David Nicholls One Day First published in 2009 Toimetanud Kirsti Sinissaar Copyright David Nicholls 2009 Tõlge eesti keelde. Triin Tael, 2011 ISBN 978-9985-3-2377-9 Kirjastus Varrak
Tartu Ülikool Sotsiaalteaduste valdkond Haridusteaduste instituut Koolieelse lasteasutuse õpetaja õppekava. Gretel Kant
 Tartu Ülikool Sotsiaalteaduste valdkond Haridusteaduste instituut Koolieelse lasteasutuse õpetaja õppekava Gretel Kant 3-AASTASTE EESTI LASTE TUNNETUSTEGEVUSE ARENGU HINDAMINE JELENA STREBELEVA METOODIKA
Tartu Ülikool Sotsiaalteaduste valdkond Haridusteaduste instituut Koolieelse lasteasutuse õpetaja õppekava Gretel Kant 3-AASTASTE EESTI LASTE TUNNETUSTEGEVUSE ARENGU HINDAMINE JELENA STREBELEVA METOODIKA
ETTEVÕTTE ÄRIPROTSESSIDE EFEKTIIVSUSE TÕSTMINE KLIENDISUHETE HALDUSE LAHENDUSE JUURUTAMISE ABIL
 TARTU ÜLIKOOL Majandusteaduskond Juhtimise ja turunduse instituut Majandusprotsesside juhtimise ja infosüsteemide lektoraat Dissertatsioon magister artium kraadi taotlemiseks majandusteaduses Nr 118 Toomas
TARTU ÜLIKOOL Majandusteaduskond Juhtimise ja turunduse instituut Majandusprotsesside juhtimise ja infosüsteemide lektoraat Dissertatsioon magister artium kraadi taotlemiseks majandusteaduses Nr 118 Toomas
EMPIIRILINE UURING MUUSIKA- JA RÜTMIMÄNGUDEST
 TALLINNA ÜLIKOOL DIGITEHNOLOOGIATE INSTITUUT EMPIIRILINE UURING MUUSIKA- JA RÜTMIMÄNGUDEST Bakalaureusetöö Autor: Mario Haugas Juhendaja: Martin Sillaots Autor:...... 2016 Juhendaja:...... 2016 Instituudi
TALLINNA ÜLIKOOL DIGITEHNOLOOGIATE INSTITUUT EMPIIRILINE UURING MUUSIKA- JA RÜTMIMÄNGUDEST Bakalaureusetöö Autor: Mario Haugas Juhendaja: Martin Sillaots Autor:...... 2016 Juhendaja:...... 2016 Instituudi
This document is a preview generated by EVS
 EESTI STANDARD EVS-ISO 5223:2013 TERAVILJA SÕELAD Test sieves for cereals (ISO 5223:1995+ISO 5223:1995/Amd 1:1999) EVS-ISO 5223:2013 EESTI STANDARDI EESSÕNA NATIONAL FOREWORD See Eesti standard EVS-ISO
EESTI STANDARD EVS-ISO 5223:2013 TERAVILJA SÕELAD Test sieves for cereals (ISO 5223:1995+ISO 5223:1995/Amd 1:1999) EVS-ISO 5223:2013 EESTI STANDARDI EESSÕNA NATIONAL FOREWORD See Eesti standard EVS-ISO
REGISTRIPÕHISE RAHVA JA ELURUUMIDE LOENDUSE TARBIJAKÜSITLUS
 REGISTRIPÕHISE RAHVA JA ELURUUMIDE LOENDUSE TARBIJAKÜSITLUS Ene-Margit Tiit Statistikaamet Kellele ja milleks on rahvaloendust tarvis? Missuguseid rahvaloenduse tulemusi on seni kõige aktiivsemalt kasutatud?
REGISTRIPÕHISE RAHVA JA ELURUUMIDE LOENDUSE TARBIJAKÜSITLUS Ene-Margit Tiit Statistikaamet Kellele ja milleks on rahvaloendust tarvis? Missuguseid rahvaloenduse tulemusi on seni kõige aktiivsemalt kasutatud?
Suure dünaamilise ulatusega (HDR) fotograafia. Õppematerjal
 fotograafia. Õppematerjal") Tallinna Ülikool Informaatika Instituut Suure dünaamilise ulatusega (HDR) fotograafia. Õppematerjal Bakalaureusetöö Autor: Tiina Mõniste Juhendaja: Kalle Kivi Autor:.... 2012 Juhendaja:.... 2012 Instituudi
Tallinna Ülikool Informaatika Instituut Suure dünaamilise ulatusega (HDR) fotograafia. Õppematerjal Bakalaureusetöö Autor: Tiina Mõniste Juhendaja: Kalle Kivi Autor:.... 2012 Juhendaja:.... 2012 Instituudi
HAJUSANDMETEGA ÜLESANNETE ROLL FÜÜSIKAÕPPE EFEKTIIVSUSE TÕSTMISEL
 HAJUSANDMETEGA ÜLESANNETE ROLL FÜÜSIKAÕPPE EFEKTIIVSUSE TÕSTMISEL Sissejuhatus Üldteada on fakt, et viimasel ajal on täppisteaduste populaarsus langenud nii Eestis kui ka mujal maailmas. Olukorda on aidanud
HAJUSANDMETEGA ÜLESANNETE ROLL FÜÜSIKAÕPPE EFEKTIIVSUSE TÕSTMISEL Sissejuhatus Üldteada on fakt, et viimasel ajal on täppisteaduste populaarsus langenud nii Eestis kui ka mujal maailmas. Olukorda on aidanud
Teadaanne Meremeestele.
 Teadaanne Meremeestele. Veeteede Talituse väljaanne. Nr. 7. Tallinnas, 6. aprillil 1940. a. Nr. 7. Käesolevas Teadaandes Meremeestele on toodud kokkuvõte 1. kuni 31. märtrt.rt Wi!n> 6
Teadaanne Meremeestele. Veeteede Talituse väljaanne. Nr. 7. Tallinnas, 6. aprillil 1940. a. Nr. 7. Käesolevas Teadaandes Meremeestele on toodud kokkuvõte 1. kuni 31. märtrt.rt Wi!n> 6
Lisamaterjal juhendajale... 80
 1 Sisukord Materjalide metoodiline ülesehitus... 3 Materjalid koos lisamaterjaliga juhendajale... 5 Estronaudi treeningkursus Missioon X... 5 Õpilase materjal... 5 Lisamaterjal juhendajale... 15 Lisatundide
1 Sisukord Materjalide metoodiline ülesehitus... 3 Materjalid koos lisamaterjaliga juhendajale... 5 Estronaudi treeningkursus Missioon X... 5 Õpilase materjal... 5 Lisamaterjal juhendajale... 15 Lisatundide
HSP HemiSPherical Project Manager ver: 1.3.3
 Poolsfääripiltide töötlemise programmi HSP HemiSPherical Project Manager ver: 1.3.3 kasutusjuhend Mait Lang Tõravere 15.11.2014 Sisukord Sissejuhatus...3 Litsentsi- ja kasutustingimused...4 Poolsfääripildid
Poolsfääripiltide töötlemise programmi HSP HemiSPherical Project Manager ver: 1.3.3 kasutusjuhend Mait Lang Tõravere 15.11.2014 Sisukord Sissejuhatus...3 Litsentsi- ja kasutustingimused...4 Poolsfääripildid
EESTI INFOTEHNLOOGIA KOLLEDŽ
 EESTI INFOTEHNLOOGIA KOLLEDŽ Allan Vein REAALAINETE ÕPET TOETAVA ROBOOTIKAPLATVORMI LOOMINE Diplomitöö INFOTEHNOLOOGIA SÜSTEEMIDE ADMINISTREERIMISE ÕPPEKAVA Juhendaja: M. Ernits Tallinn 2010 AUTORIDEKLARATSIOON
EESTI INFOTEHNLOOGIA KOLLEDŽ Allan Vein REAALAINETE ÕPET TOETAVA ROBOOTIKAPLATVORMI LOOMINE Diplomitöö INFOTEHNOLOOGIA SÜSTEEMIDE ADMINISTREERIMISE ÕPPEKAVA Juhendaja: M. Ernits Tallinn 2010 AUTORIDEKLARATSIOON
Curriculum Activities for Driving Course Curriculum Sample 1
 Curriculum Activities for Driving Course Curriculum Sample 1 This sample is provided to give you some guidance in developing your own challenges. This mat is meant to serve as an intro to EV3 moves and
Curriculum Activities for Driving Course Curriculum Sample 1 This sample is provided to give you some guidance in developing your own challenges. This mat is meant to serve as an intro to EV3 moves and
ILLUMINATUS! ESIMENE OSA. Silm püramiidis
 ILLUMINATUS! ESIMENE OSA Silm püramiidis Robert Shea, Robert Anton Wilson ILLUMINATUS! ESIMENE OSA.. Silm puramiidis Tallinn 2008 Robert Shea, Robert Anton Wilson The Illuminatus! Trilogy The Eye in the
ILLUMINATUS! ESIMENE OSA Silm püramiidis Robert Shea, Robert Anton Wilson ILLUMINATUS! ESIMENE OSA.. Silm puramiidis Tallinn 2008 Robert Shea, Robert Anton Wilson The Illuminatus! Trilogy The Eye in the
ÜLEVAADE SATELLIITSIDESÜSTEEMIDEST
 ÜLEVAADE SATELLIITSIDESÜSTEEMIDEST Käesolev kirjatükk annab ülevaate sellest, mida kujutavad endast satelliidid, millisel otstarbel neid kasutatakse ja millised on kasutamiseesmärkidest tulenevad piirangud
ÜLEVAADE SATELLIITSIDESÜSTEEMIDEST Käesolev kirjatükk annab ülevaate sellest, mida kujutavad endast satelliidid, millisel otstarbel neid kasutatakse ja millised on kasutamiseesmärkidest tulenevad piirangud
5 Touring. Paigaldus- ja kasutamisjuhend
 Paigaldus- ja kasutamisjuhend 5 Touring Lugege seda hoiatust enne GEONAV toote kasutamist. HOIATUS ELEKTROONILINE KAART ON NAVIGEERIMISVAHEND, MIS HÕLBUSTAB RIIKLIKE KAARTIDE KASUTAMIST, KUID EI ASENDA
Paigaldus- ja kasutamisjuhend 5 Touring Lugege seda hoiatust enne GEONAV toote kasutamist. HOIATUS ELEKTROONILINE KAART ON NAVIGEERIMISVAHEND, MIS HÕLBUSTAB RIIKLIKE KAARTIDE KASUTAMIST, KUID EI ASENDA
Navigatsioon. konspekt. koostas Marika Kulmar Peeter Lahe järelvalve all Tackmer Air jaoks. uuendatud 4. juuli 2007
 Navigatsioon konspekt koostas Marika Kulmar Peeter Lahe järelvalve all Tackmer Air jaoks uuendatud 4. juuli 2007 Tallinn 2007 1 Sisukord 1 Planeet Maa... 4 1.1 Maa geograafia... 4 1.2 Aeg...5 2 Kaardid
Navigatsioon konspekt koostas Marika Kulmar Peeter Lahe järelvalve all Tackmer Air jaoks uuendatud 4. juuli 2007 Tallinn 2007 1 Sisukord 1 Planeet Maa... 4 1.1 Maa geograafia... 4 1.2 Aeg...5 2 Kaardid
Jazzklaveri ainekava. ainekava kestvus: 3(4) õppeaastat ( 5-7(8) kl. ) Eesmärgid ja ülesanded:
 õppeaastat ( 5-7(8) kl. ) Eesmärgid ja ülesanded:") Jazzklaveri ainekava ainekava kestvus: 3(4) õppeaastat ( 5-7(8) kl. ) Eesmärgid ja ülesanded: - Eesmärgiks on põhjalikult süveneda jazzmuusika helikeelele. - Jazz harmoonia lahti seletamine, teoreetiline
Jazzklaveri ainekava ainekava kestvus: 3(4) õppeaastat ( 5-7(8) kl. ) Eesmärgid ja ülesanded: - Eesmärgiks on põhjalikult süveneda jazzmuusika helikeelele. - Jazz harmoonia lahti seletamine, teoreetiline
Originaali tiitel: 1001 Inventions That Changed the World
 Originaali tiitel: 1001 Inventions That Changed the World A Quintessence Book Esmatrükk Suurbritannias 2009. aastal Cassell Illustrated Octopus Publishing Group Limited 2 4 Heron Quays, London E14 4JP
Originaali tiitel: 1001 Inventions That Changed the World A Quintessence Book Esmatrükk Suurbritannias 2009. aastal Cassell Illustrated Octopus Publishing Group Limited 2 4 Heron Quays, London E14 4JP
EESTI AKREDITEERIMISKESKUS
 Leht Page 1 (8) EESTI AKREDITEERIMISKESKUS LISA I AS Metrosert akrediteerimistunnistusele I050 ANNEX I to accreditation certificate I050 of Metrosert Ltd 1. Akrediteerimisulatus siseriikliku esma- ja kordustaatluse
Leht Page 1 (8) EESTI AKREDITEERIMISKESKUS LISA I AS Metrosert akrediteerimistunnistusele I050 ANNEX I to accreditation certificate I050 of Metrosert Ltd 1. Akrediteerimisulatus siseriikliku esma- ja kordustaatluse
LIBATEADUSE ANATOOMIAST JA TAKSONOOMIAST
 LIBATEADUSE ANATOOMIAST JA TAKSONOOMIAST SISSEJUHATUS See oli 29-ndal juulil 1865; Nephtali André oli lõpetanud oma ülikooliõpingud ja oli merereisul. Prantsusmaa ja Alžiiri vahel lagedal merel kuuleb
LIBATEADUSE ANATOOMIAST JA TAKSONOOMIAST SISSEJUHATUS See oli 29-ndal juulil 1865; Nephtali André oli lõpetanud oma ülikooliõpingud ja oli merereisul. Prantsusmaa ja Alžiiri vahel lagedal merel kuuleb
KÕRGUSLIKU TÄPSUSE SUURENDAMINE RTK RAKENDUSTES MILLIMEETER GPS ABIL IMPROVING VERTICAL ACCURACY IN RTK APPLICATIONS USING MILLIMETER GPS
 EESTI MAAÜLIKOOL Metsandus- ja maaehitusinstituut Toomas Orason KÕRGUSLIKU TÄPSUSE SUURENDAMINE RTK RAKENDUSTES MILLIMEETER GPS ABIL IMPROVING VERTICAL ACCURACY IN RTK APPLICATIONS USING MILLIMETER GPS
EESTI MAAÜLIKOOL Metsandus- ja maaehitusinstituut Toomas Orason KÕRGUSLIKU TÄPSUSE SUURENDAMINE RTK RAKENDUSTES MILLIMEETER GPS ABIL IMPROVING VERTICAL ACCURACY IN RTK APPLICATIONS USING MILLIMETER GPS
Tartu Ülikool Loodus- ja täppisteaduste valdkond Tehnoloogiainstituut. Sander Sõritsa. Nutikodu lahenduse baaskomponentide loomine
 Tartu Ülikool Loodus- ja täppisteaduste valdkond Tehnoloogiainstituut Sander Sõritsa Nutikodu lahenduse baaskomponentide loomine Bakalaureusetöö (12 EAP) Arvutitehnika eriala Juhendajad: MSc Urmas Tamm
Tartu Ülikool Loodus- ja täppisteaduste valdkond Tehnoloogiainstituut Sander Sõritsa Nutikodu lahenduse baaskomponentide loomine Bakalaureusetöö (12 EAP) Arvutitehnika eriala Juhendajad: MSc Urmas Tamm
GEODEETILISED TÖÖD SAMMUVA EKSKAVAATORI EŠ 15/90A NOOLE MONTAAŽIL
 Irina Borozdyukhina GEODEETILISED TÖÖD SAMMUVA EKSKAVAATORI EŠ 15/90A NOOLE MONTAAŽIL LÕPUTÖÖ Ehitusteaduskond Rakendusgeodeesia eriala Tallinn 2014 SISUKORD SISSEJUHATUS... 7 1. OBJEKTI KIRJELDUS... 9
Irina Borozdyukhina GEODEETILISED TÖÖD SAMMUVA EKSKAVAATORI EŠ 15/90A NOOLE MONTAAŽIL LÕPUTÖÖ Ehitusteaduskond Rakendusgeodeesia eriala Tallinn 2014 SISUKORD SISSEJUHATUS... 7 1. OBJEKTI KIRJELDUS... 9
SIDE - KONSPEKT... 2
 SIDE - KONSPEKT... 2 SIDESÜSTEEM... 2 SIGNAALI KULG... 2 NÄIDE SHANNONI VALEMI KASUTAMISE KOHTA.... 3 VÕRK... 4 MOBIILVÕRGUD... 4 AHEL- JA PAKETTKOMMUNIKATSIOON... 5 PAKETTSIDE... 5 MOBIILSUS... 5 ÜLESANNE,
SIDE - KONSPEKT... 2 SIDESÜSTEEM... 2 SIGNAALI KULG... 2 NÄIDE SHANNONI VALEMI KASUTAMISE KOHTA.... 3 VÕRK... 4 MOBIILVÕRGUD... 4 AHEL- JA PAKETTKOMMUNIKATSIOON... 5 PAKETTSIDE... 5 MOBIILSUS... 5 ÜLESANNE,
Control a Robot via VEP Using Emotiv EPOC
 UNIVERSITY OF TARTU FACULTY OF MATHEMATICS AND COMPUTER SCIENCE Institute of Computer Science Computer Science Curriculum Anti Ingel Control a Robot via VEP Using Emotiv EPOC Bachelor s Thesis (9 ECTS)
UNIVERSITY OF TARTU FACULTY OF MATHEMATICS AND COMPUTER SCIENCE Institute of Computer Science Computer Science Curriculum Anti Ingel Control a Robot via VEP Using Emotiv EPOC Bachelor s Thesis (9 ECTS)
Arvutimängu tegelase loomine kasutades 3D modelleerimistarkvara Blender
 Tallinna Ülikool Informaatika Instituut Arvutimängu tegelase loomine kasutades 3D modelleerimistarkvara Blender Bakalaureusetöö Autor: Heindrig Paabut Juhendaja: Martin Sillaots Autor:...,,...,,2015 Juhendaja:...,,...,,2015
Tallinna Ülikool Informaatika Instituut Arvutimängu tegelase loomine kasutades 3D modelleerimistarkvara Blender Bakalaureusetöö Autor: Heindrig Paabut Juhendaja: Martin Sillaots Autor:...,,...,,2015 Juhendaja:...,,...,,2015
INGLI ILMUTUS. Kuidas muuta maailma inglite abiga. Diana Cooper KIRJASTUS VALGUSESAAR
 INGLI ILMUTUS Kuidas muuta maailma inglite abiga Diana Cooper KIRJASTUS VALGUSESAAR Originaali tiitel: Angel Inspiration How to change your world with the angels Avaldatud lepingu alusel kirjastusega Hodder
INGLI ILMUTUS Kuidas muuta maailma inglite abiga Diana Cooper KIRJASTUS VALGUSESAAR Originaali tiitel: Angel Inspiration How to change your world with the angels Avaldatud lepingu alusel kirjastusega Hodder
TARTU ÜLIKOOL LOODUS- JA TEHNOLOOGIATEADUSKOND Tehnoloogiainstituut Arvutitehnika eriala
 TARTU ÜLIKOOL LOODUS- JA TEHNOLOOGIATEADUSKOND Tehnoloogiainstituut Arvutitehnika eriala Tõnis Terasmaa NÕUDED ROBOTMANNEKEENIDE FOTOSTUUDIO TEHNILISE TOE TARKVARALE Bakalaureusetöö (12 EAP) Juhendaja:
TARTU ÜLIKOOL LOODUS- JA TEHNOLOOGIATEADUSKOND Tehnoloogiainstituut Arvutitehnika eriala Tõnis Terasmaa NÕUDED ROBOTMANNEKEENIDE FOTOSTUUDIO TEHNILISE TOE TARKVARALE Bakalaureusetöö (12 EAP) Juhendaja:
TEEDEEHITUSES KASUTATUD BITUUMENID, EMULSIOONID JA KILLUSTIKUD
 TEEDEEHITUSES KASUTATUD BITUUMENID, EMULSIOONID JA KILLUSTIKUD Consumption of bitumen, emulsions and crushed stones in the road industry Company Data ASFALTSEGUDE TOOTMINE Production of Asphalt Mixtures
TEEDEEHITUSES KASUTATUD BITUUMENID, EMULSIOONID JA KILLUSTIKUD Consumption of bitumen, emulsions and crushed stones in the road industry Company Data ASFALTSEGUDE TOOTMINE Production of Asphalt Mixtures
Eellaetava õhkrelva projekteerimine
 MEHHAANIKAINSTITUUT Tootearenduse õppetool MES70LT Vitali Lopatnjuk Eellaetava õhkrelva projekteerimine Autor taotleb tehnikateaduse magistri akadeemilist kraadi 1 AUTORIDEKLARATSIOON Deklareerin, et käesolev
MEHHAANIKAINSTITUUT Tootearenduse õppetool MES70LT Vitali Lopatnjuk Eellaetava õhkrelva projekteerimine Autor taotleb tehnikateaduse magistri akadeemilist kraadi 1 AUTORIDEKLARATSIOON Deklareerin, et käesolev
Analog Front End Components for Bio-Impedance Measurement: Current Source Design and Implementation
 THESIS ON INFORMATICS AND SYSTEM ENGINEERING C63 Analog Front End Components for Bio-Impedance Measurement: Current Source Design and Implementation ARGO KASEMAA PRESS TALLINN UNIVERSITY OF TECHNOLOGY
THESIS ON INFORMATICS AND SYSTEM ENGINEERING C63 Analog Front End Components for Bio-Impedance Measurement: Current Source Design and Implementation ARGO KASEMAA PRESS TALLINN UNIVERSITY OF TECHNOLOGY
The Induction and Objective Measurement of Illusory Roll-Axis Vection in Virtual Reality
 UNIVERSITY OF TARTU Institute of Computer Science Computer Science Curriculum Al William Tammsaar The Induction and Objective Measurement of Illusory Roll-Axis Vection in Virtual Reality Bachelor s Thesis
UNIVERSITY OF TARTU Institute of Computer Science Computer Science Curriculum Al William Tammsaar The Induction and Objective Measurement of Illusory Roll-Axis Vection in Virtual Reality Bachelor s Thesis
Fotofiltri restauratiivne nostalgia Aap Tepper. Restorative Nostalgia of Photo Filters Aap Tepper
 Fotofiltri restauratiivne nostalgia Aap Tepper Minu magistriprojekt on loomingulise väljundiga uurimistöö, mille keskne teema on nostalgiliste omadustega fotofilter digitaalfotograafias. Käesolev projekt
Fotofiltri restauratiivne nostalgia Aap Tepper Minu magistriprojekt on loomingulise väljundiga uurimistöö, mille keskne teema on nostalgiliste omadustega fotofilter digitaalfotograafias. Käesolev projekt
Referaat Jeff Beck. Jaan Jaago 8B
 Referaat Jeff Beck Jaan Jaago 8B Geoffrey Arnold Beck sündis 1944. aastal 24. juunil Wallingtonis Surrey`s Inglismaal. Irooniliselt alustas Beck, kes nüüd enam ei laula, kooripoisina. Hiljem võttis ta
Referaat Jeff Beck Jaan Jaago 8B Geoffrey Arnold Beck sündis 1944. aastal 24. juunil Wallingtonis Surrey`s Inglismaal. Irooniliselt alustas Beck, kes nüüd enam ei laula, kooripoisina. Hiljem võttis ta
Eesti Vabariigi Rahandusministeerium
 Eesti Vabariigi Rahandusministeerium Hindamisaruanne Riikliku Arengukava rakendussüsteemi ja selle toimivuse hindamine 7. juuli 2006 pwc Sisukord Aruandes kasutatud peamised lühendid... 3 Lühikokkuvõte
Eesti Vabariigi Rahandusministeerium Hindamisaruanne Riikliku Arengukava rakendussüsteemi ja selle toimivuse hindamine 7. juuli 2006 pwc Sisukord Aruandes kasutatud peamised lühendid... 3 Lühikokkuvõte
Kalorifeer LH / LH-EC (Originaaltõlge)
") Paigaldus-, kasutus- ja hooldusjuhend Kalorifeer LH / LH-EC (Originaaltõlge) Wolf GmbH Postfach 80 D-84048 Mainburg Tel. +49875/74-0 Fax +49875/74600 Internet: www.wolf-heiztechnik.de Art.-Nr.: 06454_050
Paigaldus-, kasutus- ja hooldusjuhend Kalorifeer LH / LH-EC (Originaaltõlge) Wolf GmbH Postfach 80 D-84048 Mainburg Tel. +49875/74-0 Fax +49875/74600 Internet: www.wolf-heiztechnik.de Art.-Nr.: 06454_050
This document is a preview generated by EVS
 EESTI STANDARD EVS-EN 62153-4-7:2016 METALL-SIDEKAABLITE KATSETUSMEETODID. OSA 4-7: ELEKTROMAGNETILINE ÜHILDUVUS. SAGEDUSELE KUNI 3 GHz JA ÜLE SELLE ETTE NÄHTUD LIIDESTE JA KOOSTETE ÜLEKANDEIMPEDANTSI
EESTI STANDARD EVS-EN 62153-4-7:2016 METALL-SIDEKAABLITE KATSETUSMEETODID. OSA 4-7: ELEKTROMAGNETILINE ÜHILDUVUS. SAGEDUSELE KUNI 3 GHz JA ÜLE SELLE ETTE NÄHTUD LIIDESTE JA KOOSTETE ÜLEKANDEIMPEDANTSI
UUT KASVU FINANTSEERITAKSE MEELELDI. ühingujuhtimisest? Rahastamisvõimalus arenguhüppeks. ``Millal rääkida kriisikooli AJAKIRI JUHILE JA OMANIKULE
 AJAKIRI JUHILE JA OMANIKULE SÜGIS 2010 (17) `` Mis kasu on heast ühingujuhtimisest? `` Rahastamisvõimalus arenguhüppeks ``Pilk Eesti riskikapitalistide portfelli ``Millal rääkida kriisikooli lõpetamisest?
AJAKIRI JUHILE JA OMANIKULE SÜGIS 2010 (17) `` Mis kasu on heast ühingujuhtimisest? `` Rahastamisvõimalus arenguhüppeks ``Pilk Eesti riskikapitalistide portfelli ``Millal rääkida kriisikooli lõpetamisest?
This document is a preview generated by EVS. Textiles - Tests for colour fastness - Part E02: Colour fastness to sea water (ISO 105-E02:2013)
") EESTI STANDARD EVS-EN ISO 105-E02:2013 Textiles - Tests for colour fastness - Part E02: Colour fastness to sea water (ISO 105-E02:2013) EESTI STANDARDI EESSÕNA NATIONAL FOREWORD See Eesti standard EVS-EN
EESTI STANDARD EVS-EN ISO 105-E02:2013 Textiles - Tests for colour fastness - Part E02: Colour fastness to sea water (ISO 105-E02:2013) EESTI STANDARDI EESSÕNA NATIONAL FOREWORD See Eesti standard EVS-EN
DUO - TRUMM JA KITARR
 TARTU ÜLIKOOLI VILJANDI KULTUURIAKADEEMIA Muusikaosakond Jazzmuusika õppekava Erko Niit DUO - TRUMM JA KITARR Loov-praktilise lõputöö teoreetiline osa Juhendaja: dotsent Raul Sööt Kaitsmisele lubatud..
TARTU ÜLIKOOLI VILJANDI KULTUURIAKADEEMIA Muusikaosakond Jazzmuusika õppekava Erko Niit DUO - TRUMM JA KITARR Loov-praktilise lõputöö teoreetiline osa Juhendaja: dotsent Raul Sööt Kaitsmisele lubatud..
Idatuul M A RY POPPI NS
 M A RY POPPI NS 1 Mary Poppins 2 P. L. T R AV E R S MARY POPPINS Inglise keelest tõlkinud PEEDU HAASLAVA 3 Mary Poppins Tõlgitud raamatutest: P. L. Travers Mary Poppins With drawings by Mary Shepard Penguin
M A RY POPPI NS 1 Mary Poppins 2 P. L. T R AV E R S MARY POPPINS Inglise keelest tõlkinud PEEDU HAASLAVA 3 Mary Poppins Tõlgitud raamatutest: P. L. Travers Mary Poppins With drawings by Mary Shepard Penguin
EESTI STANDARD EVS-EN :1999
 EEST STANDARD EVS-EN 25183-1:1999 Kontaktpunktkeevitus. Elektroodide üleminekupuksid, pistikkoonused 1:10. Osa 1: Kooniline kinnitus, koonus 1:10. Resistance spot welding - Electrode adaptors, male taper
EEST STANDARD EVS-EN 25183-1:1999 Kontaktpunktkeevitus. Elektroodide üleminekupuksid, pistikkoonused 1:10. Osa 1: Kooniline kinnitus, koonus 1:10. Resistance spot welding - Electrode adaptors, male taper
Kolmest tänavusest aasta linnust kaks hiireviu ja taliviu on Eesti Looduse tutvustusringi juba läbinud. Järg on jõudnud viimase, herilaseviu kätte.
 Herilaseviu eriline suvitaja Kolmest tänavusest aasta linnust kaks hiireviu ja taliviu on Eesti Looduse tutvustusringi juba läbinud. Järg on jõudnud viimase, herilaseviu kätte. Olavi Vainu, Ülo Väli Oskar
Herilaseviu eriline suvitaja Kolmest tänavusest aasta linnust kaks hiireviu ja taliviu on Eesti Looduse tutvustusringi juba läbinud. Järg on jõudnud viimase, herilaseviu kätte. Olavi Vainu, Ülo Väli Oskar
This document is a preview generated by EVS
 EESTI STANDARD EVS-EN 12758:2011 Klaas ehituses. Klaasing ja õhuheli isolatsioon. Toote kirjeldused ja omaduste määramine Glass in building - Glazing and airborne sound insulation - Product s and determination
EESTI STANDARD EVS-EN 12758:2011 Klaas ehituses. Klaasing ja õhuheli isolatsioon. Toote kirjeldused ja omaduste määramine Glass in building - Glazing and airborne sound insulation - Product s and determination
This document is a preview generated by EVS
 EESTI STANDARD EVS-EN ISO 14457:2012 Dentistry - Handpieces and motors (ISO 14457:2012) EESTI STANDARDI EESSÕNA NATIONAL FOREWORD See Eesti standard EVS-EN ISO 14457:2012 sisaldab Euroopa standardi EN
EESTI STANDARD EVS-EN ISO 14457:2012 Dentistry - Handpieces and motors (ISO 14457:2012) EESTI STANDARDI EESSÕNA NATIONAL FOREWORD See Eesti standard EVS-EN ISO 14457:2012 sisaldab Euroopa standardi EN
This document is a preview generated by EVS
 EESTI STANDARD EVS-EN 60495:2002 Single sideband power-line carrier terminals EESTI STANDARDIKESKUS EESTI STANDARDI EESSÕNA NATIONAL FOREWORD Käesolev Eesti standard EVS-EN 60495:2002 sisaldab Euroopa
EESTI STANDARD EVS-EN 60495:2002 Single sideband power-line carrier terminals EESTI STANDARDIKESKUS EESTI STANDARDI EESSÕNA NATIONAL FOREWORD Käesolev Eesti standard EVS-EN 60495:2002 sisaldab Euroopa
Suveelamus Kaisma järv ja Võsateater
 NR 7 (202) VÄNDRA ALEVI JA VALLA AJALEHT 31. juuli 2013 65 aastat C. R. Jakobsoni Talumuuseumi Etenduse,,Tiiul tosin vanemaid tegelased: Marika Kruusmaa (Rosiine), Ain Pertel (Kristjan Reimets), Imbi Tõnisson
NR 7 (202) VÄNDRA ALEVI JA VALLA AJALEHT 31. juuli 2013 65 aastat C. R. Jakobsoni Talumuuseumi Etenduse,,Tiiul tosin vanemaid tegelased: Marika Kruusmaa (Rosiine), Ain Pertel (Kristjan Reimets), Imbi Tõnisson
This document is a preview generated by EVS
 EESTI STANDARD EVS-EN 60966-2-6:2009 Radio frequency and coaxial cable assemblies - Part 2-6: Detail specification for cable assemblies for radio and TV receivers - Frequency range 0 MHz to 3 000 MHz,
EESTI STANDARD EVS-EN 60966-2-6:2009 Radio frequency and coaxial cable assemblies - Part 2-6: Detail specification for cable assemblies for radio and TV receivers - Frequency range 0 MHz to 3 000 MHz,
Üüriarvestus. korteriyhistu.net. Illar Leuhin
 Üüriarvestus Kuidas kasutada portaali korteriyhistu.net Illar Leuhin Üüriarvestusega alustamine (1)! Valige menüüst «Üüriarvestus» «Perioodid» avaneb uue perioodi lisamise vorm! Märkige valik «arved tasutakse
Üüriarvestus Kuidas kasutada portaali korteriyhistu.net Illar Leuhin Üüriarvestusega alustamine (1)! Valige menüüst «Üüriarvestus» «Perioodid» avaneb uue perioodi lisamise vorm! Märkige valik «arved tasutakse
Paigaldusjuhend (i) FuranFlex. Versioon
 FuranFlex. Versioon") Paigaldusjuhend (i) FuranFlex PAIGALDUSJUHEND 1. KASUTUSOTSTARVE... 2 2. JUHENDI HÕLMAVUS... 3 3. VIITED... 3 4. TEHNILINE KIRJELDUS... 3 4.1 TÖÖVAHENDID JA -MATERJALID... 3 4.2 TÖÖ KORRALDAMINE... 4 4.3
Paigaldusjuhend (i) FuranFlex PAIGALDUSJUHEND 1. KASUTUSOTSTARVE... 2 2. JUHENDI HÕLMAVUS... 3 3. VIITED... 3 4. TEHNILINE KIRJELDUS... 3 4.1 TÖÖVAHENDID JA -MATERJALID... 3 4.2 TÖÖ KORRALDAMINE... 4 4.3
EESTI KIRJANDUSMUUSEUMI AASTARAAMAT 2009
 U N I V E R S U M I T U U D I S T A D E S P A A R S A M M U K E S T X X V I EESTI KIRJANDUSMUUSEUMI AASTARAAMAT 2009 1 2 U N I V E R S U M I T U U D I S T A D E S P A A R S A M M U K E S T X X V I E E
U N I V E R S U M I T U U D I S T A D E S P A A R S A M M U K E S T X X V I EESTI KIRJANDUSMUUSEUMI AASTARAAMAT 2009 1 2 U N I V E R S U M I T U U D I S T A D E S P A A R S A M M U K E S T X X V I E E
Henri Lillmaa ESTCUBE-1 PÄIKESEELEMENDI SIMULAATORI ARENDUS JA TESTIMINE
 TARTU ÜLIKOOL LOODUS- JA TEHNOLOOGIATEADUSKOND Arvutitehnika eriala Henri Lillmaa ESTCUBE-1 PÄIKESEELEMENDI SIMULAATORI ARENDUS JA TESTIMINE Bakalaureusetöö (12 EAP) Juhendaja: M.Sc. Mihkel Pajusalu Tartu
TARTU ÜLIKOOL LOODUS- JA TEHNOLOOGIATEADUSKOND Arvutitehnika eriala Henri Lillmaa ESTCUBE-1 PÄIKESEELEMENDI SIMULAATORI ARENDUS JA TESTIMINE Bakalaureusetöö (12 EAP) Juhendaja: M.Sc. Mihkel Pajusalu Tartu
This document is a preview generated by EVS
 EESTI STANDARD EVS-EN ISO 8015:2011 Toote geomeetrilised spetsifikatsioonid (GPS). Alused. Käsitlusviisid, põhimõtted ja reeglid Geometrical product specifications (GPS) - Fundamentals - Concepts, principles
EESTI STANDARD EVS-EN ISO 8015:2011 Toote geomeetrilised spetsifikatsioonid (GPS). Alused. Käsitlusviisid, põhimõtted ja reeglid Geometrical product specifications (GPS) - Fundamentals - Concepts, principles
1 / ÕNNELIKUS ABIELUS NAINE VÕI KAS ON SEKSI PÄRAST SURMA?
 1 / ÕNNELIKUS ABIELUS NAINE VÕI KAS ON SEKSI PÄRAST SURMA? Tavaliselt hoian ma kiusatusest eemale seni, kuni ei suuda enam sellele vastu panna. Mae West (varastatud Oscar Wilde ilt) ERICA JONG Tavatsesin
1 / ÕNNELIKUS ABIELUS NAINE VÕI KAS ON SEKSI PÄRAST SURMA? Tavaliselt hoian ma kiusatusest eemale seni, kuni ei suuda enam sellele vastu panna. Mae West (varastatud Oscar Wilde ilt) ERICA JONG Tavatsesin
This document is a preview generated by EVS
 EESTI STANDARD EVS-EN 10223-1:2012 Steel wire and wire products for fencing and netting - Part 1: Zinc and zinc-alloy coated steel barbed wire EESTI STANDARDI EESSÕNA NATIONAL FOREWORD See Eesti standard
EESTI STANDARD EVS-EN 10223-1:2012 Steel wire and wire products for fencing and netting - Part 1: Zinc and zinc-alloy coated steel barbed wire EESTI STANDARDI EESSÕNA NATIONAL FOREWORD See Eesti standard
This document is a preview generated by EVS
 EESTI STANDARD EVS-EN ISO 4535:2003 Vitreous and procelain enamels - Apparatus for determination of resistance to hot detergent solutions used for washing textiles EESTI STANDARDIKESKUS EESTI STANDARDI
EESTI STANDARD EVS-EN ISO 4535:2003 Vitreous and procelain enamels - Apparatus for determination of resistance to hot detergent solutions used for washing textiles EESTI STANDARDIKESKUS EESTI STANDARDI
This document is a preview generated by EVS
 EESTI STANDARD EVS-EN 61023:2002 Maritime navigation and radiocommunication equipment and systems - Marine speed and distance measuring equipment (SDME) - Performance requirements - Methods of testing
EESTI STANDARD EVS-EN 61023:2002 Maritime navigation and radiocommunication equipment and systems - Marine speed and distance measuring equipment (SDME) - Performance requirements - Methods of testing