ECE 445 Spring 2017 Autonomous Trash Can. Group #85: Eshwar Cheekati, Michael Gao, Aditya Sule
|
|
|
- Roxanne Morton
- 5 years ago
- Views:
Transcription
1 ECE 445 Spring 27 Autonomous Trash Can Group #85: Eshwar Cheekati, Michael Gao, Aditya Sule

2 Introduction High amount of waste generated Poor communication/trash management -> smelly odors Need for reminder to take trash out
3 Objectives Two aspects - Detection and Navigation Detection focuses on accurate reading of when trash is full Navigation focuses on moving trash can to the door
4
5
6 Power Calculations Important so we can select the following parts Battery Motor Required figures What is the torque required to turn the wheels? What is the power required to produce that torque?
7 Power Calculations - Basic theory Simple system One wheel on a incline Forces acting on wheel v Friction (f) Gravity (mg) Normal (N) r mg N y x f θ
8 Power Calculations - Assumptions Mass m = kg Coefficient of friction μ =.6 Incline θ = 3 Radius r = 5 cm Efficiency E = 6% Velocity v = 5cm/s v r mg N y x f θ
9 Power Calculations - Working it out v f + mg sin(θ) = F () N = mg cos(θ) (2) r f = μn (3) τ = Fr = mg (sin(θ) + μ cos(θ)) r τ = 3.9 Nm mg N y x f θ
10 Power Calculations - Working it out v P = τω/e () ω = v/r (2) r P = τv/er P = 5.3 W mg N y x f θ
11 Power Calculations - Results We need about 5.5W to drive the motors We need a torque of 3.2Nm to able to keep in steady motion.6nm per motor v r mg N y x f θ

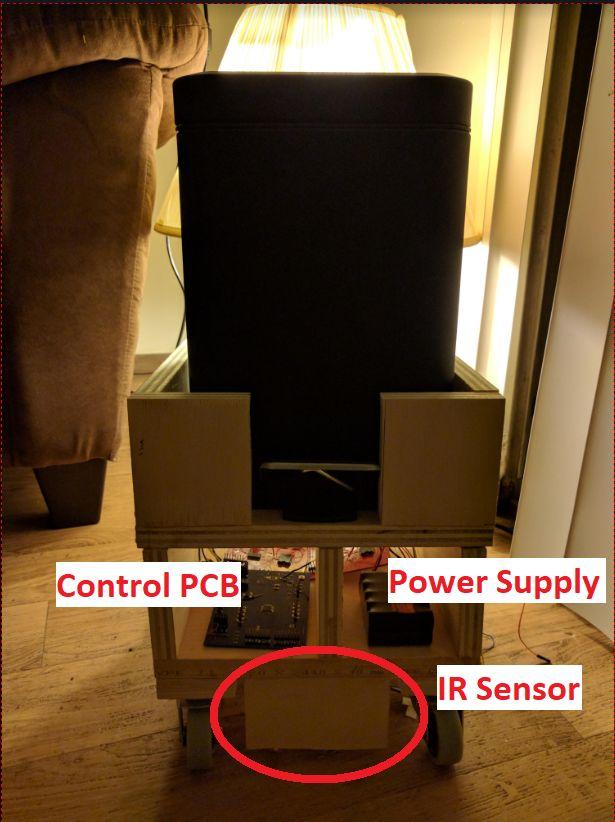
12 Power Supply 2 V, 2mAh NiMH battery Rechargeable Safer than Li-ion batteries

13 Microcontroller - Atmega328pb-au 24 digital IO pins 6 MHz clock frequency Compatible with Arduino

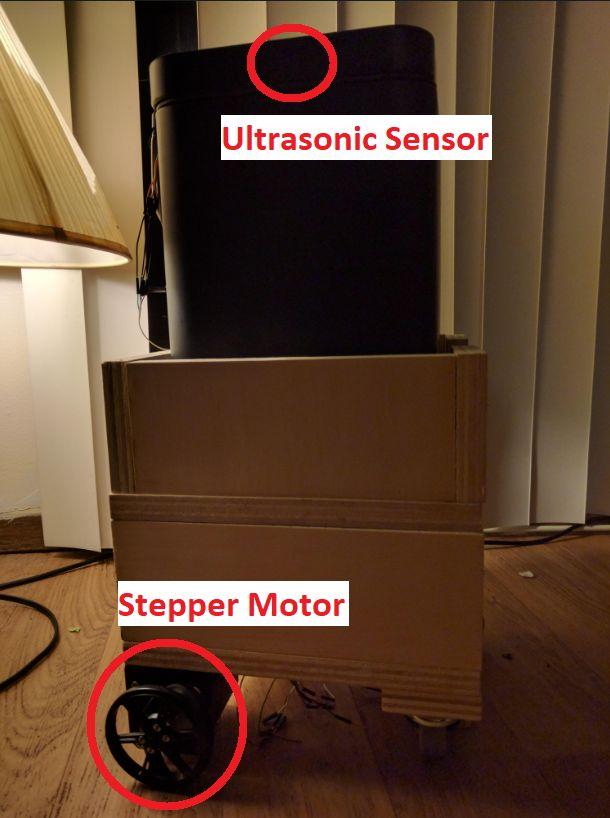
14 Trash Level Detection: Weight vs Volume Ranging sensors HC-SR4 ultrasonic sensor
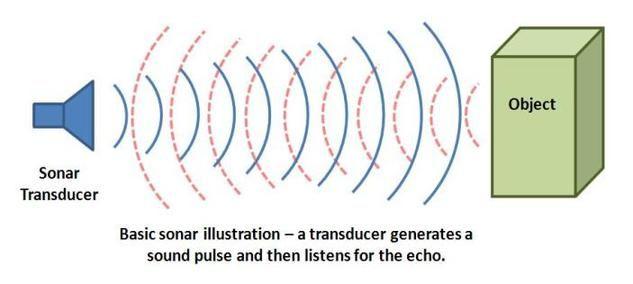
15 Ultrasonic Sensors
16 Trash Level Distance Calculation: Distance (cm) = (T/2) x ( second/343 cm) T = Time between sending wave from trig pin to receiving wave from echo Trash level distance reading taken every 5ms
17 Trash Level Percentage Calculation: D = average of 5 ultrasonic sensor measurements Trash Percentage fullness: (24 - D)/24 x % 24 cm is the height of the trash can

18 Data Collection Wifi vs Bluetooth
19 ESP8266 Low cost Full TCP/IP Stack Substantial online documentation
20 Web Server:

21 HTTP Request: POST: Sent to my web server URL with trash level attached as url-encoded value GET: Sent to my web server URL and returns all data samples in JSON
22 Web Server: Collected data from trash level readings and displayed results in daily, weekly, and monthly views
23 Web Server:
24 Motor Selection Stepper Motor vs DC motor Torque vs RPM Bipolar vs Unipolar Winding resistance -> B -> T 8.6V, 2A, 2.35Nm
25 Current sense resistors L297 L298 Control signals
26 Motor Clock Frequency Performance Frequency Revolutions Time RPS
27 Hardware vs Software Generated Clock Atmega328 PWM timing issues NE555 timer Frequency = 29 Hz Duty cycle = 66.6%
28 Linear Velocity Calculation and Desired Wheel Radius v = rw w = 2π x rps v = r x (2π x rps) v = r x (2π x.5) With 4mm radius wheel, speed is 37.7 cm/sec No Load
29 Navigation Options Left Motor Velocity Right Motor Velocity Motion Not moving Moving left Moving right Moving straight

30 IR Sensor and Tape-following # of sensors Sensor positioning Color threshold for IR reading
31 Navigation Decisions S S2 S3 S4 Result Stop b/c error Right Right Right Left Don t care Go straight Sharp right
32 Navigation Decisions contd S S2 S3 S4 Result Left Don t care Don t care Don t care Left Don t care Sharp Left Stop reached
33 Obstacle Avoidance Use three ultrasound sensors: front, left and right. Takes control when front sensor detects obstacle. Exact distance measurements by ultrasound sensors necessary. Returns control to navigation system when complete. Make an initial turn and then follow the obstacle.
34 Obstacle Avoidance - Initial turn If neither sensor detects an obstacle, turn left. If the left sensor also detects an obstacle turn right. If the right sensor also detects an obstacle turn left. If both sensors detect an obstacle, reverse. Follow state machine for going around the obstacle (left/right).
35 Going around the obstacle Say we choose to go left first. Controlled by simple state machine. States represent directions we are moving in. Transitions represent sensor inputs. Exit when tape is detected again

36 USB To Motor Driver Ultrasound Microcontroller IR Wifi Module

37 From main PCB Motor
38 What Went Wrong - PCB Clock too far from microcontroller. Ordered too few of the same parts. Microcontroller bootloader was hard to find.
39 Navigation Errors PCBs not functional after plugging in battery Incorrectly plugged in battery Vref set for peak load current to be 2A L298 cannot sustain 2A without huge voltage drop High heat -> chip fried Bench vs battery Need for current regulator and recalculation of Vref
40 Conclusion and What went wrong? Level-detection aspect successful. Problems with navigation. Problems with PCB design. Problems with power unit.
41 Further Work Support bigger trash cans Have smarter navigation More web-app features
42 Questions?
ECE 477 Digital Systems Senior Design Project Rev 8/09. Homework 5: Theory of Operation and Hardware Design Narrative
 ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: _ATV Group No. 3 Team Member Completing This Homework: Sebastian Hening
ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: _ATV Group No. 3 Team Member Completing This Homework: Sebastian Hening
WifiBotics. An Arduino Based Robotics Workshop
 WifiBotics An Arduino Based Robotics Workshop WifiBotics is the workshop designed by RoboKart group pioneers in this field way back in 2014 and copied by many competitors. This workshop is based on the
WifiBotics An Arduino Based Robotics Workshop WifiBotics is the workshop designed by RoboKart group pioneers in this field way back in 2014 and copied by many competitors. This workshop is based on the
Introduction. Theory of Operation
 Mohan Rokkam Page 1 12/15/2004 Introduction The goal of our project is to design and build an automated shopping cart that follows a shopper around. Ultrasonic waves are used due to the slower speed of
Mohan Rokkam Page 1 12/15/2004 Introduction The goal of our project is to design and build an automated shopping cart that follows a shopper around. Ultrasonic waves are used due to the slower speed of
Object Detection for Collision Avoidance in ITS
 Available online www.ejaet.com European Journal of Advances in Engineering and Technology, 2016, 3(5): 29-35 Research Article ISSN: 2394-658X Object Detection for Collision Avoidance in ITS Rupojyoti Kar
Available online www.ejaet.com European Journal of Advances in Engineering and Technology, 2016, 3(5): 29-35 Research Article ISSN: 2394-658X Object Detection for Collision Avoidance in ITS Rupojyoti Kar
ME375 Lab Project. Bradley Boane & Jeremy Bourque April 25, 2018
 ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
Mobile robots. The Simplified Electronics of a Mobile Robot. (Control, Communication, Motors and Drives) (without sensory system)
 (without sensory system)") Mobile robots The Simplified Electronics of a Mobile Robot (Control, Communication, Motors and Drives) (without sensory system) Components: Electrical Components of Mobile Robots: Control System: processors,
Mobile robots The Simplified Electronics of a Mobile Robot (Control, Communication, Motors and Drives) (without sensory system) Components: Electrical Components of Mobile Robots: Control System: processors,
Critical Design Review: M.A.D. Dog. Nicholas Maddy Timothy Dayley Kevin Liou
 Critical Design Review: M.A.D. Dog Nicholas Maddy Timothy Dayley Kevin Liou Project Description M.A.D. Dog is an autonomous robot with the following functionalities: - Map and patrol an office environment.
Critical Design Review: M.A.D. Dog Nicholas Maddy Timothy Dayley Kevin Liou Project Description M.A.D. Dog is an autonomous robot with the following functionalities: - Map and patrol an office environment.
ME 461 Laboratory #5 Characterization and Control of PMDC Motors
 ME 461 Laboratory #5 Characterization and Control of PMDC Motors Goals: 1. Build an op-amp circuit and use it to scale and shift an analog voltage. 2. Calibrate a tachometer and use it to determine motor
ME 461 Laboratory #5 Characterization and Control of PMDC Motors Goals: 1. Build an op-amp circuit and use it to scale and shift an analog voltage. 2. Calibrate a tachometer and use it to determine motor
Cypress Robot Kit Final Report
 Cypress Robot Kit Final Report Team Members: Alvin Wu Byung Joo Park Todd Nguyen Teaching Assistant: Katherine O Kane ECE 445 Group #5 December 7, 2016 Abstract The Programmable System-on-Chip (PSoC) made
Cypress Robot Kit Final Report Team Members: Alvin Wu Byung Joo Park Todd Nguyen Teaching Assistant: Katherine O Kane ECE 445 Group #5 December 7, 2016 Abstract The Programmable System-on-Chip (PSoC) made
GetTutorialized Workshops Brochure-2017
 GetTutorialized Workshops Brochure-2017 Internet of Things with Arduino Workshop course Content: 1. Introduction to Internet of Things 2. Introduction to Microcontrollers and Microprocessors 3. Microcontrollers
GetTutorialized Workshops Brochure-2017 Internet of Things with Arduino Workshop course Content: 1. Introduction to Internet of Things 2. Introduction to Microcontrollers and Microprocessors 3. Microcontrollers
CONTROLLING THE OSCILLATIONS OF A SWINGING BELL BY USING THE DRIVING INDUCTION MOTOR AS A SENSOR
 Proceedings, XVII IMEKO World Congress, June 7,, Dubrovnik, Croatia Proceedings, XVII IMEKO World Congress, June 7,, Dubrovnik, Croatia XVII IMEKO World Congress Metrology in the rd Millennium June 7,,
Proceedings, XVII IMEKO World Congress, June 7,, Dubrovnik, Croatia Proceedings, XVII IMEKO World Congress, June 7,, Dubrovnik, Croatia XVII IMEKO World Congress Metrology in the rd Millennium June 7,,
Solar Powered Obstacle Avoiding Robot
 Solar Powered Obstacle Avoiding Robot S.S. Subashka Ramesh 1, Tarun Keshri 2, Sakshi Singh 3, Aastha Sharma 4 1 Asst. professor, SRM University, Chennai, Tamil Nadu, India. 2, 3, 4 B.Tech Student, SRM
Solar Powered Obstacle Avoiding Robot S.S. Subashka Ramesh 1, Tarun Keshri 2, Sakshi Singh 3, Aastha Sharma 4 1 Asst. professor, SRM University, Chennai, Tamil Nadu, India. 2, 3, 4 B.Tech Student, SRM
Electronics Design Laboratory Lecture #6. ECEN2270 Electronics Design Laboratory
 Electronics Design Laboratory Lecture #6 Electronics Design Laboratory 1 Soldering tips ECEN 227 Electronics Design Laboratory 2 Introduction to Lab 3 Part B: Closed-Loop Speed Control -1V Experiment 3A
Electronics Design Laboratory Lecture #6 Electronics Design Laboratory 1 Soldering tips ECEN 227 Electronics Design Laboratory 2 Introduction to Lab 3 Part B: Closed-Loop Speed Control -1V Experiment 3A
LINE MAZE SOLVING ROBOT
 LINE MAZE SOLVING ROBOT EEE 456 REPORT OF INTRODUCTION TO ROBOTICS PORJECT PROJECT OWNER: HAKAN UÇAROĞLU 2000502055 INSTRUCTOR: AHMET ÖZKURT 1 CONTENTS I- Abstract II- Sensor Circuit III- Compare Circuit
LINE MAZE SOLVING ROBOT EEE 456 REPORT OF INTRODUCTION TO ROBOTICS PORJECT PROJECT OWNER: HAKAN UÇAROĞLU 2000502055 INSTRUCTOR: AHMET ÖZKURT 1 CONTENTS I- Abstract II- Sensor Circuit III- Compare Circuit
ECE 511: MICROPROCESSORS
 ECE 511: MICROPROCESSORS A project report on SNIFFING DOG Under the guidance of Prof. Jens Peter Kaps By, Preethi Santhanam (G00767634) Ranjit Mandavalli (G00819673) Shaswath Raghavan (G00776950) Swathi
ECE 511: MICROPROCESSORS A project report on SNIFFING DOG Under the guidance of Prof. Jens Peter Kaps By, Preethi Santhanam (G00767634) Ranjit Mandavalli (G00819673) Shaswath Raghavan (G00776950) Swathi
Available online Journal of Scientific and Engineering Research, 2018, 5(4): Research Article
: Research Article") Available online www.jsaer.com, 2018, 5(4):341-349 Research Article ISSN: 2394-2630 CODEN(USA): JSERBR Arduino Based door Automation System Using Ultrasonic Sensor and Servo Motor Orji EZ*, Oleka CV, Nduanya
Available online www.jsaer.com, 2018, 5(4):341-349 Research Article ISSN: 2394-2630 CODEN(USA): JSERBR Arduino Based door Automation System Using Ultrasonic Sensor and Servo Motor Orji EZ*, Oleka CV, Nduanya
Advanced Mechatronics 1 st Mini Project. Remote Control Car. Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014
 Advanced Mechatronics 1 st Mini Project Remote Control Car Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014 Remote Control Car Manual Control with the remote and direction buttons Automatic
Advanced Mechatronics 1 st Mini Project Remote Control Car Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014 Remote Control Car Manual Control with the remote and direction buttons Automatic
Floating Ball Using Fuzzy Logic Controller
 Floating Ball Using Fuzzy Logic Controller Abdullah Alrashedi Ahmad Alghanim Iris Tsai Sponsored by: Dr. Ruting Jia Tareq Alduwailah Fahad Alsaqer Mohammad Alkandari Jasem Alrabeeh Abstract Floating ball
Floating Ball Using Fuzzy Logic Controller Abdullah Alrashedi Ahmad Alghanim Iris Tsai Sponsored by: Dr. Ruting Jia Tareq Alduwailah Fahad Alsaqer Mohammad Alkandari Jasem Alrabeeh Abstract Floating ball
Application Note # 5448
 Application Note # 5448 Shunt Regulator Operation What is a shunt regulator? A shunt regulator is an electrical device used in motion control systems to regulate the voltage level of the DC bus supply
Application Note # 5448 Shunt Regulator Operation What is a shunt regulator? A shunt regulator is an electrical device used in motion control systems to regulate the voltage level of the DC bus supply
MICROCONTROLLER BASED ULTRASONIC STICK FOR VISUALLY IMPAIRED
 MICROCONTROLLER BASED ULTRASONIC STICK FOR VISUALLY IMPAIRED AN INTERNSHIP REPORT Submitted by CALEB RUBIN S P (2016105022) PRASANTH V (2016105059) THEYANESHWARAN J (2016105075) DIVAKAR M (2016105525)
MICROCONTROLLER BASED ULTRASONIC STICK FOR VISUALLY IMPAIRED AN INTERNSHIP REPORT Submitted by CALEB RUBIN S P (2016105022) PRASANTH V (2016105059) THEYANESHWARAN J (2016105075) DIVAKAR M (2016105525)
Brushed DC Motor Microcontroller PWM Speed Control with Optical Encoder and H-Bridge
 Brushed DC Motor Microcontroller PWM Speed Control with Optical Encoder and H-Bridge L298 Full H-Bridge HEF4071B OR Gate Brushed DC Motor with Optical Encoder & Load Inertia Flyback Diodes Arduino Microcontroller
Brushed DC Motor Microcontroller PWM Speed Control with Optical Encoder and H-Bridge L298 Full H-Bridge HEF4071B OR Gate Brushed DC Motor with Optical Encoder & Load Inertia Flyback Diodes Arduino Microcontroller
Stepper Motors in C. Unipolar (5 lead) stepper motorr. $1.95 from 100 steps per rotation. 24V / 160mA / 600 gm cm holding 160mA
 stepper motorr. $1.95 from 100 steps per rotation. 24V / 160mA / 600 gm cm holding 160mA") U tepper Motors ugust 22, 2017 tepper Motors in Unipolar (5 lead) stepper motorr. $1.95 from www.mpja.com 100 steps per rotation. 24V / 160m / 600 gm cm holding torque @ 160m stepper motor is a digital
U tepper Motors ugust 22, 2017 tepper Motors in Unipolar (5 lead) stepper motorr. $1.95 from www.mpja.com 100 steps per rotation. 24V / 160m / 600 gm cm holding torque @ 160m stepper motor is a digital
Boozer Cruiser. EEL Electrical Engineering Design 2 Final Design Report. April 23, The Mobile Bartending Robot.
 EEL4924 - Electrical Engineering Design 2 Final Design Report April 23, 2013 Boozer Cruiser The Mobile Bartending Robot Team Members: Mackenzie Banker Perry Fowlkes mbanker@ufl.edu perry.pfowlkes@gmail.com
EEL4924 - Electrical Engineering Design 2 Final Design Report April 23, 2013 Boozer Cruiser The Mobile Bartending Robot Team Members: Mackenzie Banker Perry Fowlkes mbanker@ufl.edu perry.pfowlkes@gmail.com
AUTOMATIC CLOTH FOLDING MACHINE
 AUTOMATIC CLOTH FOLDING MACHINE. By Xudong Li Anran Su Suicheng Zhan Final Report for ECE 445, Senior Design, Spring 2017 TA: Yuchen He 3 May 2017 Project No. 43 Abstract The purpose of this project is
AUTOMATIC CLOTH FOLDING MACHINE. By Xudong Li Anran Su Suicheng Zhan Final Report for ECE 445, Senior Design, Spring 2017 TA: Yuchen He 3 May 2017 Project No. 43 Abstract The purpose of this project is
Autonomous Following RObot Initial Design Review
 Autonomous Following RObot Initial Design Review James Tse (Leader) Wei Dai Travis Frecker Peter Verlangieri Professor John Johnson ECE 189A Fall 2012 Initial Design Review: Project Description Original
Autonomous Following RObot Initial Design Review James Tse (Leader) Wei Dai Travis Frecker Peter Verlangieri Professor John Johnson ECE 189A Fall 2012 Initial Design Review: Project Description Original
Australian Journal of Basic and Applied Sciences
 AENSI Journals Australian Journal of Basic and Applied Sciences ISSN:1991-8178 Journal home page: www.ajbasweb.com An Improved Low Cost Automated Mobile Robot 1 J. Hossen, 2 S. Sayeed, 3 M. Saleh, 4 P.
AENSI Journals Australian Journal of Basic and Applied Sciences ISSN:1991-8178 Journal home page: www.ajbasweb.com An Improved Low Cost Automated Mobile Robot 1 J. Hossen, 2 S. Sayeed, 3 M. Saleh, 4 P.
MULTI ROBOT COMMUNICATION AND TARGET TRACKING SYSTEM AND IMPLEMENTATION OF ROBOT USING ARDUINO
 MULTI ROBOT COMMUNICATION AND TARGET TRACKING SYSTEM AND IMPLEMENTATION OF ROBOT USING ARDUINO K. Sindhuja 1, CH. Lavanya 2 1Student, Department of ECE, GIST College, Andhra Pradesh, INDIA 2Assistant Professor,
MULTI ROBOT COMMUNICATION AND TARGET TRACKING SYSTEM AND IMPLEMENTATION OF ROBOT USING ARDUINO K. Sindhuja 1, CH. Lavanya 2 1Student, Department of ECE, GIST College, Andhra Pradesh, INDIA 2Assistant Professor,
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators
 Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
A Differential Steering Control with Proportional Controller for An Autonomous Mobile Robot
 A Differential Steering Control with Proportional Controller for An Autonomous Mobile Robot Mohd Saifizi Saidonr #1, Hazry Desa *2, Rudzuan Md Noor #3 # School of Mechatronics, UniversityMalaysia Perlis
A Differential Steering Control with Proportional Controller for An Autonomous Mobile Robot Mohd Saifizi Saidonr #1, Hazry Desa *2, Rudzuan Md Noor #3 # School of Mechatronics, UniversityMalaysia Perlis
2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control. October 5, 2009 Dr. Harrison H. Chin
 2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control October 5, 2009 Dr. Harrison H. Chin Formal Labs 1. Microcontrollers Introduction to microcontrollers Arduino microcontroller
2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control October 5, 2009 Dr. Harrison H. Chin Formal Labs 1. Microcontrollers Introduction to microcontrollers Arduino microcontroller
EXPERIMENT 6: Advanced I/O Programming
 EXPERIMENT 6: Advanced I/O Programming Objectives: To familiarize students with DC Motor control and Stepper Motor Interfacing. To utilize MikroC and MPLAB for Input Output Interfacing and motor control.
EXPERIMENT 6: Advanced I/O Programming Objectives: To familiarize students with DC Motor control and Stepper Motor Interfacing. To utilize MikroC and MPLAB for Input Output Interfacing and motor control.
Introduction: Components used:
 Introduction: As, this robotic arm is automatic in a way that it can decides where to move and when to move, therefore it works in a closed loop system where sensor detects if there is any object in a
Introduction: As, this robotic arm is automatic in a way that it can decides where to move and when to move, therefore it works in a closed loop system where sensor detects if there is any object in a
Persistence of Vision LED Sphere
 Persistence of Vision LED Sphere Project Proposal ECE 445 February 10, 2016 TA: Vivian Hou Michael Ling Li Quan 1 Table of Contents 1.0 Introduction... 3 1.1 Purpose and Motivation:... 3 1.2 Objectives:...
Persistence of Vision LED Sphere Project Proposal ECE 445 February 10, 2016 TA: Vivian Hou Michael Ling Li Quan 1 Table of Contents 1.0 Introduction... 3 1.1 Purpose and Motivation:... 3 1.2 Objectives:...
Real Time Embedded Systems. Lecture 1 January 17, 2012
 Electric Motors Real Time Embedded Systems www.atomicrhubarb.com/embedded Lecture 1 January 17, 2012 Topic Warning! This is a work in progress. Watch out for sharp corners and slippery surfaces Motors
Electric Motors Real Time Embedded Systems www.atomicrhubarb.com/embedded Lecture 1 January 17, 2012 Topic Warning! This is a work in progress. Watch out for sharp corners and slippery surfaces Motors
Introduction to the Arduino Kit
 1 Introduction to the Arduino Kit Introduction Arduino is an open source microcontroller platform used for sensing both digital and analog input signals and for sending digital and analog output signals
1 Introduction to the Arduino Kit Introduction Arduino is an open source microcontroller platform used for sensing both digital and analog input signals and for sending digital and analog output signals
Figure 1. System Block Diagram with Subsystems
 Blind Me With SciEEnce EJ Hinlo, Caitlin Gruis, Chris Ravasio First Design Review System Block Diagram Figure 1. System Block Diagram with Subsystems Subsystem Communication Diagram Figure 2. Subsystem
Blind Me With SciEEnce EJ Hinlo, Caitlin Gruis, Chris Ravasio First Design Review System Block Diagram Figure 1. System Block Diagram with Subsystems Subsystem Communication Diagram Figure 2. Subsystem
CHAPTER 4 ANALYSIS AND DESIGN
 9 CHAPTER 4 ANALYSIS AND DESIGN 4.1 Analysis In this project, the sorting activity of the item or packet delivery is done automatically with the computer (integrated with Arduino microcontroller). The
9 CHAPTER 4 ANALYSIS AND DESIGN 4.1 Analysis In this project, the sorting activity of the item or packet delivery is done automatically with the computer (integrated with Arduino microcontroller). The
T-535-MECH Mechatronics II DC Conveyor motor control using Arduino Uno programmed in C Final report. Gunnar Óli Sölvason
 T-535-MECH Mechatronics II DC Conveyor motor control using Arduino Uno programmed in C Final report Gunnar Óli Sölvason February 26, 2014 Contents Abstract 2 1 Introduction 3 1.1 Background......................................
T-535-MECH Mechatronics II DC Conveyor motor control using Arduino Uno programmed in C Final report Gunnar Óli Sölvason February 26, 2014 Contents Abstract 2 1 Introduction 3 1.1 Background......................................
Carnegie Mellon University. Embedded Systems Design TeleTouch. Cristian Vallejo, Chelsea Kwong, Elizabeth Yan, Rohan Jadvani
 Carnegie Mellon University Embedded Systems Design 18-549 TeleTouch Cristian Vallejo, Chelsea Kwong, Elizabeth Yan, Rohan Jadvani May 15, 2017 1 Abstract Haptic technology recreates the sense of touch
Carnegie Mellon University Embedded Systems Design 18-549 TeleTouch Cristian Vallejo, Chelsea Kwong, Elizabeth Yan, Rohan Jadvani May 15, 2017 1 Abstract Haptic technology recreates the sense of touch
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 05.11.2015
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 05.11.2015
Design Document. Autonomous Tiny Robots. ECE Spring TA: Luke Wendt. Team 64 Timothy Claussen Haoyu Wu Ruiyang Ding
 1 Design Document Autonomous Tiny Robots ECE 445 - Spring 2017 TA: Luke Wendt Team 64 Timothy Claussen Haoyu Wu Ruiyang Ding 2 1. Introduction 1.1 Objective Swarm robotics is an emerging field of robotics
1 Design Document Autonomous Tiny Robots ECE 445 - Spring 2017 TA: Luke Wendt Team 64 Timothy Claussen Haoyu Wu Ruiyang Ding 2 1. Introduction 1.1 Objective Swarm robotics is an emerging field of robotics
Project Name Here CSEE 4840 Project Design Document. Thomas Chau Ben Sack Peter Tsonev
 Project Name Here CSEE 4840 Project Design Document Thomas Chau tc2165@columbia.edu Ben Sack bs2535@columbia.edu Peter Tsonev pvt2101@columbia.edu Table of contents: Introduction Page 3 Block Diagram Page
Project Name Here CSEE 4840 Project Design Document Thomas Chau tc2165@columbia.edu Ben Sack bs2535@columbia.edu Peter Tsonev pvt2101@columbia.edu Table of contents: Introduction Page 3 Block Diagram Page
Smart Hunting Cage for Predatory Animals and Moving Bait for Zoology Researches
 Moving Bait for Zoology Researches Mohammed Ehsan Safi Electrical Engineering Department, University of Technology/Baghdad Email: mohammed.ehsan@ymail.com Received on: 28/4/2015 & Accepted on: 17/12/2015
Moving Bait for Zoology Researches Mohammed Ehsan Safi Electrical Engineering Department, University of Technology/Baghdad Email: mohammed.ehsan@ymail.com Received on: 28/4/2015 & Accepted on: 17/12/2015
Ocean Controls KT-5198 Dual Bidirectional DC Motor Speed Controller
 Ocean Controls KT-5198 Dual Bidirectional DC Motor Speed Controller Microcontroller Based Controls 2 DC Motors 0-5V Analog, 1-2mS pulse or Serial Inputs for Motor Speed 10KHz, 1.25KHz or 156Hz selectable
Ocean Controls KT-5198 Dual Bidirectional DC Motor Speed Controller Microcontroller Based Controls 2 DC Motors 0-5V Analog, 1-2mS pulse or Serial Inputs for Motor Speed 10KHz, 1.25KHz or 156Hz selectable
Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic
 Universal Journal of Control and Automation 6(1): 13-18, 2018 DOI: 10.13189/ujca.2018.060102 http://www.hrpub.org Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic Yousef Moh. Abueejela
Universal Journal of Control and Automation 6(1): 13-18, 2018 DOI: 10.13189/ujca.2018.060102 http://www.hrpub.org Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic Yousef Moh. Abueejela
7 Lab: Motor control for orientation and angular speed
 Prelab Participation Lab Name: 7 Lab: Motor control for orientation and angular speed Control systems help satellites to track distant stars, airplanes to follow a desired trajectory, cars to travel at
Prelab Participation Lab Name: 7 Lab: Motor control for orientation and angular speed Control systems help satellites to track distant stars, airplanes to follow a desired trajectory, cars to travel at
Sensor and. Motor Control Lab. Abhishek Bhatia. Individual Lab Report #1
 Sensor and 10/16/2015 Motor Control Lab Individual Lab Report #1 Abhishek Bhatia Team D: Team HARP (Human Assistive Robotic Picker) Teammates: Alex Brinkman, Feroze Naina, Lekha Mohan, Rick Shanor I. Individual
Sensor and 10/16/2015 Motor Control Lab Individual Lab Report #1 Abhishek Bhatia Team D: Team HARP (Human Assistive Robotic Picker) Teammates: Alex Brinkman, Feroze Naina, Lekha Mohan, Rick Shanor I. Individual
OBSTACLE EVADING ULTRASONIC ROBOT. Aaron Hunter Eric Whitestone Joel Chenette Anne-Marie Cressin
 OBSTACLE EVADING ULTRASONIC ROBOT Aaron Hunter Eric Whitestone Joel Chenette Anne-Marie Cressin ECE 511 - Fall 2011 1 Abstract The purpose of this project is to demonstrate how simple algorithms can produce
OBSTACLE EVADING ULTRASONIC ROBOT Aaron Hunter Eric Whitestone Joel Chenette Anne-Marie Cressin ECE 511 - Fall 2011 1 Abstract The purpose of this project is to demonstrate how simple algorithms can produce
DEMONSTRATION OF ROBOTIC WHEELCHAIR IN FUKUOKA ISLAND-CITY
 DEMONSTRATION OF ROBOTIC WHEELCHAIR IN FUKUOKA ISLAND-CITY Yutaro Fukase fukase@shimz.co.jp Hitoshi Satoh hitoshi_sato@shimz.co.jp Keigo Takeuchi Intelligent Space Project takeuchikeigo@shimz.co.jp Hiroshi
DEMONSTRATION OF ROBOTIC WHEELCHAIR IN FUKUOKA ISLAND-CITY Yutaro Fukase fukase@shimz.co.jp Hitoshi Satoh hitoshi_sato@shimz.co.jp Keigo Takeuchi Intelligent Space Project takeuchikeigo@shimz.co.jp Hiroshi
Electronics Design Laboratory Lecture #9. ECEN 2270 Electronics Design Laboratory
 Electronics Design Laboratory Lecture #9 Electronics Design Laboratory 1 Notes Finishing Lab 4 this week Demo requires position control using interrupts and two actions Rotate a given angle Move forward
Electronics Design Laboratory Lecture #9 Electronics Design Laboratory 1 Notes Finishing Lab 4 this week Demo requires position control using interrupts and two actions Rotate a given angle Move forward
Training Schedule. Robotic System Design using Arduino Platform
 Training Schedule Robotic System Design using Arduino Platform Session - 1 Embedded System Design Basics : Scope : To introduce Embedded Systems hardware design fundamentals to students. Processor Selection
Training Schedule Robotic System Design using Arduino Platform Session - 1 Embedded System Design Basics : Scope : To introduce Embedded Systems hardware design fundamentals to students. Processor Selection
Mars Rover: System Block Diagram. November 19, By: Dan Dunn Colin Shea Eric Spiller. Advisors: Dr. Huggins Dr. Malinowski Mr.
 Mars Rover: System Block Diagram November 19, 2002 By: Dan Dunn Colin Shea Eric Spiller Advisors: Dr. Huggins Dr. Malinowski Mr. Gutschlag System Block Diagram An overall system block diagram, shown in
Mars Rover: System Block Diagram November 19, 2002 By: Dan Dunn Colin Shea Eric Spiller Advisors: Dr. Huggins Dr. Malinowski Mr. Gutschlag System Block Diagram An overall system block diagram, shown in
Nikhil Mahalingam 1, Veera S. Kumar 2 1,2 (Computer Science & Engineering, PSG College of Technology, India)
") Robotic Walking Aid for Visually Impaired Nikhil Mahalingam 1, Veera S. Kumar 2 1,2 (Computer Science & Engineering, PSG College of Technology, India) ABSTRACT : In this fast developing world, it is hard
Robotic Walking Aid for Visually Impaired Nikhil Mahalingam 1, Veera S. Kumar 2 1,2 (Computer Science & Engineering, PSG College of Technology, India) ABSTRACT : In this fast developing world, it is hard
Smart Phone Based Assistant System for Handicapped/Disable/Aged People
 IJIRST International Journal for Innovative Research in Science & Technology Volume 3 Issue 10 March 2017 ISSN (online): 2349-6010 Smart Phone Based Assistant System for Handicapped/Disable/Aged People
IJIRST International Journal for Innovative Research in Science & Technology Volume 3 Issue 10 March 2017 ISSN (online): 2349-6010 Smart Phone Based Assistant System for Handicapped/Disable/Aged People
DE1.3 Electronics 1. Tips on Team Projects
 DE1.3 Electronics 1 Tips on Team Projects To help you progress with the team project, I have prepared this documents to provide extra instructions that you should find helpful. 1. How can I drive TWO motors
DE1.3 Electronics 1 Tips on Team Projects To help you progress with the team project, I have prepared this documents to provide extra instructions that you should find helpful. 1. How can I drive TWO motors
MAKEVMA502 BASIC DIY KIT WITH ATMEGA2560 FOR ARDUINO USER MANUAL
 BASIC DIY KIT WITH ATMEGA2560 FOR ARDUINO USER MANUAL USER MANUAL 1. Introduction To all residents of the European Union Important environmental information about this product This symbol on the device
BASIC DIY KIT WITH ATMEGA2560 FOR ARDUINO USER MANUAL USER MANUAL 1. Introduction To all residents of the European Union Important environmental information about this product This symbol on the device
Mini-Expansion Unit (MEU) User Guide V1.2
 User Guide V1.2") Mini-Expansion Unit (MEU) User Guide V1.2 Disclaimer Although every care is taken with the design of this product, JT Innovations Ltd. can in no way be held responsible for any consequential damage resulting
Mini-Expansion Unit (MEU) User Guide V1.2 Disclaimer Although every care is taken with the design of this product, JT Innovations Ltd. can in no way be held responsible for any consequential damage resulting
Haptic Feedback Glove Group 23 ECE 445: Senior Design TA: John Capozzo. Mithul Garg, Vince Maxwell, Ellie Quirini
 Haptic Feedback Glove Group 23 ECE 445: Senior Design TA: John Capozzo Mithul Garg, Vince Maxwell, Ellie Quirini Introduction Haptic feedback system for VR Environmental sensory verification Games: Immersion,
Haptic Feedback Glove Group 23 ECE 445: Senior Design TA: John Capozzo Mithul Garg, Vince Maxwell, Ellie Quirini Introduction Haptic feedback system for VR Environmental sensory verification Games: Immersion,
Android Phone Based Assistant System for Handicapped/Disabled/Aged People
 IJIRST International Journal for Innovative Research in Science & Technology Volume 3 Issue 10 March 2017 ISSN (online): 2349-6010 Android Phone Based Assistant System for Handicapped/Disabled/Aged People
IJIRST International Journal for Innovative Research in Science & Technology Volume 3 Issue 10 March 2017 ISSN (online): 2349-6010 Android Phone Based Assistant System for Handicapped/Disabled/Aged People
Measuring Distance Using Sound
 Measuring Distance Using Sound Distance can be measured in various ways: directly, using a ruler or measuring tape, or indirectly, using radio or sound waves. The indirect method measures another variable
Measuring Distance Using Sound Distance can be measured in various ways: directly, using a ruler or measuring tape, or indirectly, using radio or sound waves. The indirect method measures another variable
Brushed DC Motor PWM Speed Control with the NI myrio, Optical Encoder, and H-Bridge
 Brushed DC Motor PWM Speed Control with the NI myrio, Optical Encoder, and H-Bridge Motor Controller Brushed DC Motor / Encoder System K. Craig 1 Gnd 5 V OR Gate H-Bridge 12 V Bypass Capacitors Flyback
Brushed DC Motor PWM Speed Control with the NI myrio, Optical Encoder, and H-Bridge Motor Controller Brushed DC Motor / Encoder System K. Craig 1 Gnd 5 V OR Gate H-Bridge 12 V Bypass Capacitors Flyback
Distance Measurement of an Object by using Ultrasonic Sensors with Arduino and GSM Module
 IJSTE - International Journal of Science Technology & Engineering Volume 4 Issue 11 May 2018 ISSN (online): 2349-784X Distance Measurement of an Object by using Ultrasonic Sensors with Arduino and GSM
IJSTE - International Journal of Science Technology & Engineering Volume 4 Issue 11 May 2018 ISSN (online): 2349-784X Distance Measurement of an Object by using Ultrasonic Sensors with Arduino and GSM
Lab 5: Inverted Pendulum PID Control
 Lab 5: Inverted Pendulum PID Control In this lab we will be learning about PID (Proportional Integral Derivative) control and using it to keep an inverted pendulum system upright. We chose an inverted
Lab 5: Inverted Pendulum PID Control In this lab we will be learning about PID (Proportional Integral Derivative) control and using it to keep an inverted pendulum system upright. We chose an inverted
2D Floor-Mapping Car
 CDA 4630 Embedded Systems Final Report Group 4: Camilo Moreno, Ahmed Awada ------------------------------------------------------------------------------------------------------------------------------------------
CDA 4630 Embedded Systems Final Report Group 4: Camilo Moreno, Ahmed Awada ------------------------------------------------------------------------------------------------------------------------------------------
Adaptive Speed and Power Control for a Pedelec Using an ARM Cortex-M0 Microcontroller
 Adaptive Speed and Power Control for a Pedelec Using an ARM Cortex-M0 Microcontroller Kristofferson Reyes 1, Jomel Lorenzo Jr. 1, Jean Clifford Espiritu 1, Pamela Denisse Sacdalan 1, Noriel Mallari 1,
Adaptive Speed and Power Control for a Pedelec Using an ARM Cortex-M0 Microcontroller Kristofferson Reyes 1, Jomel Lorenzo Jr. 1, Jean Clifford Espiritu 1, Pamela Denisse Sacdalan 1, Noriel Mallari 1,
An Autonomous Self- Propelled Robot Designed for Obstacle Avoidance and Fire Fighting
 An Autonomous Self- Propelled Robot Designed for Obstacle Avoidance and Fire Fighting K. Prathyusha Assistant professor, Department of ECE, NRI Institute of Technology, Agiripalli Mandal, Krishna District,
An Autonomous Self- Propelled Robot Designed for Obstacle Avoidance and Fire Fighting K. Prathyusha Assistant professor, Department of ECE, NRI Institute of Technology, Agiripalli Mandal, Krishna District,
A Model Based Approach for Human Recognition and Reception by Robot
 16 MHz ARDUINO A Model Based Approach for Human Recognition and Reception by Robot Prof. R. Sunitha Department Of ECE, N.R.I Institute Of Technology, J.N.T University, Kakinada, India. V. Sai Krishna,
16 MHz ARDUINO A Model Based Approach for Human Recognition and Reception by Robot Prof. R. Sunitha Department Of ECE, N.R.I Institute Of Technology, J.N.T University, Kakinada, India. V. Sai Krishna,
Development of An Experimental Setup for the Altitude Control of A Ball in A Pipe Şeyma AKYÜREK 1,a,GizemSezin ÖZDEN 1,b, Coşku KASNAKOĞLU 1,c
 Applied Mechanics and Materials Vols. 789-790 (2015) pp 1016-1020 (2015) Trans Tech Publications, Switzerland doi:10.4028/www.scientific.net/amm.789-790.1016 Development of An Experimental Setup for the
Applied Mechanics and Materials Vols. 789-790 (2015) pp 1016-1020 (2015) Trans Tech Publications, Switzerland doi:10.4028/www.scientific.net/amm.789-790.1016 Development of An Experimental Setup for the
An Autonomous Firefighting Robot
 An Autonomous Firefighting Robot William Dubel Hector Gongora Kevin Bechtold Daisy Diaz Department of Electrical and Computer Engineering Florida International University, Miami, FL 33199 Abstract Firefighting
An Autonomous Firefighting Robot William Dubel Hector Gongora Kevin Bechtold Daisy Diaz Department of Electrical and Computer Engineering Florida International University, Miami, FL 33199 Abstract Firefighting
Validation Document. ELEC 491 Capstone Proposal - Dynamic Projector Mount Project. Andy Kwan Smaran Karimbil Siamak Rahmanian Dante Ye
 Validation Document ELEC 491 Capstone Proposal - Dynamic Projector Mount Project Andy Kwan Smaran Karimbil Siamak Rahmanian Dante Ye Executive Summary: The purpose of this document is to describe the tests
Validation Document ELEC 491 Capstone Proposal - Dynamic Projector Mount Project Andy Kwan Smaran Karimbil Siamak Rahmanian Dante Ye Executive Summary: The purpose of this document is to describe the tests
ROBOTICS & IOT. Workshop Module
 ROBOTICS & IOT Workshop Module CURRICULUM STRUCTURE DURATION : 2 day (16 hours) Session 1 Let's Learn Embedded System & Robotics Description Under this topic, we will discuss basics and give brief idea
ROBOTICS & IOT Workshop Module CURRICULUM STRUCTURE DURATION : 2 day (16 hours) Session 1 Let's Learn Embedded System & Robotics Description Under this topic, we will discuss basics and give brief idea
ROBOTICS & IOT. Workshop Module
 ROBOTICS & IOT Workshop Module CURRICULUM STRUCTURE DURATION : 2 day (16 hours) Session 1 Let's Learn Embedded System & Robotics Description Under this topic, we will discuss basics and give brief idea
ROBOTICS & IOT Workshop Module CURRICULUM STRUCTURE DURATION : 2 day (16 hours) Session 1 Let's Learn Embedded System & Robotics Description Under this topic, we will discuss basics and give brief idea
combine regular DC-motors with a gear-box and an encoder/potentiometer to form a position control loop can only assume a limited range of angular
 Embedded Control Applications II MP10-1 Embedded Control Applications II MP10-2 week lecture topics 10 Embedded Control Applications II - Servo-motor control - Stepper motor control - The control of a
Embedded Control Applications II MP10-1 Embedded Control Applications II MP10-2 week lecture topics 10 Embedded Control Applications II - Servo-motor control - Stepper motor control - The control of a
Automatic Docking System with Recharging and Battery Replacement for Surveillance Robot
 International Journal of Electronics and Computer Science Engineering 1148 Available Online at www.ijecse.org ISSN- 2277-1956 Automatic Docking System with Recharging and Battery Replacement for Surveillance
International Journal of Electronics and Computer Science Engineering 1148 Available Online at www.ijecse.org ISSN- 2277-1956 Automatic Docking System with Recharging and Battery Replacement for Surveillance
Critical Sign Tracking
 Critical Sign Tracking May 14-18 Client: Dr. Halil Ceylan Advisor: Dr. Daji Qiao Group Members: Simeng Liu, Aaron Cannon, Zheng Luo, David-Paul Adeola Website: http://seniord.ece.iastate.edu/may1418/index.html
Critical Sign Tracking May 14-18 Client: Dr. Halil Ceylan Advisor: Dr. Daji Qiao Group Members: Simeng Liu, Aaron Cannon, Zheng Luo, David-Paul Adeola Website: http://seniord.ece.iastate.edu/may1418/index.html
Energy Efficiency for Secured Smart Village using IoT
 Energy Efficiency for Secured Smart Village using IoT S.P. Angelin Claret 1 1 Asst. Prof, Department of Computer Science, SRM Institute of Science & Technology, Chennai. Abstract: This paper is all about
Energy Efficiency for Secured Smart Village using IoT S.P. Angelin Claret 1 1 Asst. Prof, Department of Computer Science, SRM Institute of Science & Technology, Chennai. Abstract: This paper is all about
LV8716QAGEVK Evaluation Kit User Guide
 LV8716QAGEVK Evaluation Kit User Guide NOTICE TO CUSTOMERS The LV8716QA Evaluation Kit is intended to be used for ENGINEERING DEVELOPMENT, DEMONSTRATION OR EVALUATION PURPOSES ONLY and is not considered
LV8716QAGEVK Evaluation Kit User Guide NOTICE TO CUSTOMERS The LV8716QA Evaluation Kit is intended to be used for ENGINEERING DEVELOPMENT, DEMONSTRATION OR EVALUATION PURPOSES ONLY and is not considered
L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G
 P R O F. S L A C K L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G G B S E E E @ R I T. E D U B L D I N G 9, O F F I C E 0 9-3 1 8 9 ( 5 8 5 ) 4 7 5-5 1 0
P R O F. S L A C K L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G G B S E E E @ R I T. E D U B L D I N G 9, O F F I C E 0 9-3 1 8 9 ( 5 8 5 ) 4 7 5-5 1 0
Walle. Members: Sebastian Hening. Amir Pourshafiee. Behnam Zohoor CMPE 118/L. Introduction to Mechatronics. Professor: Gabriel H.
 Walle Members: Sebastian Hening Amir Pourshafiee Behnam Zohoor CMPE 118/L Introduction to Mechatronics Professor: Gabriel H. Elkaim March 19, 2012 Page 2 Introduction: In this report, we will explain the
Walle Members: Sebastian Hening Amir Pourshafiee Behnam Zohoor CMPE 118/L Introduction to Mechatronics Professor: Gabriel H. Elkaim March 19, 2012 Page 2 Introduction: In this report, we will explain the
The Robot Builder's Shield for Arduino
 The Robot Builder's Shield for Arduino by Ro-Bot-X Designs Introduction. The Robot Builder's Shield for Arduino was especially designed to make building robots with Arduino easy. The built in dual motors
The Robot Builder's Shield for Arduino by Ro-Bot-X Designs Introduction. The Robot Builder's Shield for Arduino was especially designed to make building robots with Arduino easy. The built in dual motors
ESE 350 Microcontroller Laboratory Lab 5: Sensor-Actuator Lab
 ESE 350 Microcontroller Laboratory Lab 5: Sensor-Actuator Lab The purpose of this lab is to learn about sensors and use the ADC module to digitize the sensor signals. You will use the digitized signals
ESE 350 Microcontroller Laboratory Lab 5: Sensor-Actuator Lab The purpose of this lab is to learn about sensors and use the ADC module to digitize the sensor signals. You will use the digitized signals
Design and Implementation of a Fingerprint Lock System
 IOSR Journal of Engineering (IOSRJEN) ISSN (e): 2250-3021, ISSN (p): 2278-8719 Vol. 07, Issue 04 (April. 2017), V1 PP 13-19 www.iosrjen.org Design and Implementation of a Fingerprint Lock System 1 Amuda
IOSR Journal of Engineering (IOSRJEN) ISSN (e): 2250-3021, ISSN (p): 2278-8719 Vol. 07, Issue 04 (April. 2017), V1 PP 13-19 www.iosrjen.org Design and Implementation of a Fingerprint Lock System 1 Amuda
Experiment P10: Acceleration of a Dynamics Cart II (Motion Sensor)
") PASCO scientific Physics Lab Manual: P10-1 Experiment P10: (Motion Sensor) Concept Time SW Interface Macintosh file Windows file Newton s Laws 30 m 500 or 700 P10 Cart Acceleration II P10_CAR2.SWS EQUIPMENT
PASCO scientific Physics Lab Manual: P10-1 Experiment P10: (Motion Sensor) Concept Time SW Interface Macintosh file Windows file Newton s Laws 30 m 500 or 700 P10 Cart Acceleration II P10_CAR2.SWS EQUIPMENT
Two Hour Robot. Lets build a Robot.
 Lets build a Robot. Our robot will use an ultrasonic sensor and servos to navigate it s way around a maze. We will be making 2 voltage circuits : A 5 Volt for our ultrasonic sensor, sound and lights powered
Lets build a Robot. Our robot will use an ultrasonic sensor and servos to navigate it s way around a maze. We will be making 2 voltage circuits : A 5 Volt for our ultrasonic sensor, sound and lights powered
GE423 Laboratory Assignment 6 Robot Sensors and Wall-Following
 GE423 Laboratory Assignment 6 Robot Sensors and Wall-Following Goals for this Lab Assignment: 1. Learn about the sensors available on the robot for environment sensing. 2. Learn about classical wall-following
GE423 Laboratory Assignment 6 Robot Sensors and Wall-Following Goals for this Lab Assignment: 1. Learn about the sensors available on the robot for environment sensing. 2. Learn about classical wall-following
DASL 120 Introduction to Microcontrollers
 DASL 120 Introduction to Microcontrollers Lecture 2 Introduction to 8-bit Microcontrollers Introduction to 8-bit Microcontrollers Introduction to 8-bit Microcontrollers Introduction to Atmel Atmega328
DASL 120 Introduction to Microcontrollers Lecture 2 Introduction to 8-bit Microcontrollers Introduction to 8-bit Microcontrollers Introduction to 8-bit Microcontrollers Introduction to Atmel Atmega328
ECE 5670/6670 Project. Brushless DC Motor Control with 6-Step Commutation. Objectives
 ECE 5670/6670 Project Brushless DC Motor Control with 6-Step Commutation Objectives The objective of the project is to build a circuit for 6-step commutation of a brushless DC motor and to implement control
ECE 5670/6670 Project Brushless DC Motor Control with 6-Step Commutation Objectives The objective of the project is to build a circuit for 6-step commutation of a brushless DC motor and to implement control
Sensors and Motor Control Lab Individual lab report #1 October 16, 2015
 Sensors and Motor Control Lab Individual lab report #1 October 16, 2015 RICHA VARMA Team I Dorothy Kirlew Pranav Maheshwari Shivam Gautam Mohak Bharadwaj 1. Individual Progress The tasks undertaken by
Sensors and Motor Control Lab Individual lab report #1 October 16, 2015 RICHA VARMA Team I Dorothy Kirlew Pranav Maheshwari Shivam Gautam Mohak Bharadwaj 1. Individual Progress The tasks undertaken by
10/21/2009. d R. d L. r L d B L08. POSE ESTIMATION, MOTORS. EECS 498-6: Autonomous Robotics Laboratory. Midterm 1. Mean: 53.9/67 Stddev: 7.
 1 d R d L L08. POSE ESTIMATION, MOTORS EECS 498-6: Autonomous Robotics Laboratory r L d B Midterm 1 2 Mean: 53.9/67 Stddev: 7.73 1 Today 3 Position Estimation Odometry IMUs GPS Motor Modelling Kinematics:
1 d R d L L08. POSE ESTIMATION, MOTORS EECS 498-6: Autonomous Robotics Laboratory r L d B Midterm 1 2 Mean: 53.9/67 Stddev: 7.73 1 Today 3 Position Estimation Odometry IMUs GPS Motor Modelling Kinematics:
An External Command Reading White line Follower Robot
 EE-712 Embedded System Design: Course Project Report An External Command Reading White line Follower Robot 09405009 Mayank Mishra (mayank@cse.iitb.ac.in) 09307903 Badri Narayan Patro (badripatro@ee.iitb.ac.in)
EE-712 Embedded System Design: Course Project Report An External Command Reading White line Follower Robot 09405009 Mayank Mishra (mayank@cse.iitb.ac.in) 09307903 Badri Narayan Patro (badripatro@ee.iitb.ac.in)
MEASUREMENT, PROTECTION, SPEED CONTROL AND GRAPHICAL OBSERVATION OF DC MOTOR PARAMETERS BY ATMEGA-16 USING EMBEDDED SYSTEMS
 MEASUREMENT, PROTECTION, SPEED CONTROL AND GRAPHICAL OBSERVATION OF DC MOTOR PARAMETERS BY ATMEGA-16 USING EMBEDDED SYSTEMS MANOJ KUMAR SWAIN 1, N.SAROJ KUMAR 2, DIGVIJAY KUMAR 3 AND MANIKA NAYAK 4 1 Associate
MEASUREMENT, PROTECTION, SPEED CONTROL AND GRAPHICAL OBSERVATION OF DC MOTOR PARAMETERS BY ATMEGA-16 USING EMBEDDED SYSTEMS MANOJ KUMAR SWAIN 1, N.SAROJ KUMAR 2, DIGVIJAY KUMAR 3 AND MANIKA NAYAK 4 1 Associate
HAND GESTURE CONTROLLED ROBOT USING ARDUINO
 HAND GESTURE CONTROLLED ROBOT USING ARDUINO Vrushab Sakpal 1, Omkar Patil 2, Sagar Bhagat 3, Badar Shaikh 4, Prof.Poonam Patil 5 1,2,3,4,5 Department of Instrumentation Bharati Vidyapeeth C.O.E,Kharghar,Navi
HAND GESTURE CONTROLLED ROBOT USING ARDUINO Vrushab Sakpal 1, Omkar Patil 2, Sagar Bhagat 3, Badar Shaikh 4, Prof.Poonam Patil 5 1,2,3,4,5 Department of Instrumentation Bharati Vidyapeeth C.O.E,Kharghar,Navi
MCT Susanoo Logics 2014 Team Description
 MCT Susanoo Logics 2014 Team Description Satoshi Takata, Yuji Horie, Shota Aoki, Kazuhiro Fujiwara, Taihei Degawa Matsue College of Technology 14-4, Nishiikumacho, Matsue-shi, Shimane, 690-8518, Japan
MCT Susanoo Logics 2014 Team Description Satoshi Takata, Yuji Horie, Shota Aoki, Kazuhiro Fujiwara, Taihei Degawa Matsue College of Technology 14-4, Nishiikumacho, Matsue-shi, Shimane, 690-8518, Japan
Robotics Workshop. for Parents and Teachers. September 27, 2014 Wichita State University College of Engineering. Karen Reynolds
 Robotics Workshop for Parents and Teachers September 27, 2014 Wichita State University College of Engineering Steve Smith Christa McAuliffe Academy ssmith3@usd259.net Karen Reynolds Wichita State University
Robotics Workshop for Parents and Teachers September 27, 2014 Wichita State University College of Engineering Steve Smith Christa McAuliffe Academy ssmith3@usd259.net Karen Reynolds Wichita State University
3D ULTRASONIC STICK FOR BLIND
 3D ULTRASONIC STICK FOR BLIND Osama Bader AL-Barrm Department of Electronics and Computer Engineering Caledonian College of Engineering, Muscat, Sultanate of Oman Email: Osama09232@cceoman.net Abstract.
3D ULTRASONIC STICK FOR BLIND Osama Bader AL-Barrm Department of Electronics and Computer Engineering Caledonian College of Engineering, Muscat, Sultanate of Oman Email: Osama09232@cceoman.net Abstract.
Electronics Design Laboratory Lecture #10. ECEN 2270 Electronics Design Laboratory
 Electronics Design Laboratory Lecture #10 Electronics Design Laboratory 1 Lessons from Experiment 4 Code debugging: use print statements and serial monitor window Circuit debugging: Re check operation
Electronics Design Laboratory Lecture #10 Electronics Design Laboratory 1 Lessons from Experiment 4 Code debugging: use print statements and serial monitor window Circuit debugging: Re check operation
Semiconductor 9/21/2015
 Semiconductor Electronics 9/21/2015 Starting simple the diode. The diode is one of the simplest semiconductor devices. It is comprised of two layers of semiconductor. One is impregnated with an electron
Semiconductor Electronics 9/21/2015 Starting simple the diode. The diode is one of the simplest semiconductor devices. It is comprised of two layers of semiconductor. One is impregnated with an electron
Modeling, Simulation and Implementation of Speed Control of DC Motor Using PIC 16F877A
 Modeling, Simulation and Implementation of Speed Control of DC Motor Using PIC 16F877A Payal P.Raval 1, Prof.C.R.mehta 2 1 PG Student, Electrical Engg. Department, Nirma University, SG Highway, Ahmedabad,
Modeling, Simulation and Implementation of Speed Control of DC Motor Using PIC 16F877A Payal P.Raval 1, Prof.C.R.mehta 2 1 PG Student, Electrical Engg. Department, Nirma University, SG Highway, Ahmedabad,
International Research Journal of Engineering and Technology (IRJET) e-issn: Volume: 05 Issue: 06 June p-issn:
 e-issn: Volume: 05 Issue: 06 June p-issn:") Smart Medical Box Ankit Tejbahadur Yadav 1, Sushant Anand Sarvade 2, Rahul Ramesh 3, Suryamani Yadav 4 1,2,3,4Student, Department of Electronics and Telecommunications Engineering, K. J. Somaiya Institute
Smart Medical Box Ankit Tejbahadur Yadav 1, Sushant Anand Sarvade 2, Rahul Ramesh 3, Suryamani Yadav 4 1,2,3,4Student, Department of Electronics and Telecommunications Engineering, K. J. Somaiya Institute
MEM380 Applied Autonomous Robots I Winter Feedback Control USARSim
 MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration