Machine Vision: Image Formation
|
|
|
- Bathsheba Mitchell
- 5 years ago
- Views:
Transcription


1 Machine Vision: Image Formation version 1.1 MediaRobotics Lab, March 2008 References: Forsyth / Ponce: Computer Vision Horn: Robot Vision Kodak CCD Primer, #KCP Adaptive Fuzzy Color Interpolation, Journal of Electronic Imaging Vol. 11(3), July Trade Association: 1394 Standards and Specifications Summary

2 A metal ring is heated and observed with a CCD camera. The ring will appear bright on the screen before a red glow can be seen by the unaided eye.
3 Stefan-Boltzman Law : total amount of radiation (F) emitted per unit time from a unit area of a black body only depends on its temperature (T) according to the following formula F = b *T^4
4 Up until the late 1800's the wave picture of light was the prevalent theory, as it could explain most of the experiments done on light. An exception was associated with blackbody radiation, which is the characteristic radiation that a body emits when heated. It was known that this radiation changes in nature as the temperature changes, and experiments on ``blackbodies'' (perfect absorbers and emitters) I theory: I ~ 1/lambda^4 experiment lambda In 1900 Planck devised a theory of blackbody radiation which gave good agreement for all wavelengths. In this theory the molecules of a body cannot have arbitrary energies but instead are quantized - the energies can only have discrete values. The magnitude of these energies is given by the formula E = n*h*f
5 e E1 e frequency = de / h h: Planck s constant m2 kg / s E2


6
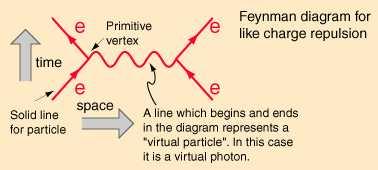
7 .. Maxwell >> Hertz/Planck >> Einstein >> Feynman 4hf de = h*f 3hf 2hf 1hf 0 E = h*f = h*c / lambda h*f = emission energy ( "Work Function W" ) + 1/2 mv^2 h = Planck's Constant = 6.63 x Js v = max speed



8

9

10 Rods Cones Very numerous, about 120 million 6-7 million on the retna sensitive receptor, low-light color sensitive cannot discriminate color three different cone receptors concentrated near optic center known as the macula


11
12 Visual Cortex Visual cortex is the term applied to both the primary visual cortex (also known as striate cortex or "V1" and upstream visual cortical areas also known as cortical areas V2, V3, V4, V5. The visual cortex occupies about one third of the surface of the cerebral cortex in humans. It is thought to be divided into as many as thirty interconnected visual areas, but at the present time there is good evidence for only 4 of these areas, V1, V2, V3 and V5. The first cortical visual area, the one that receives information directly from the lateral geniculate nucleus, is the Primary Visual Cortex, or V1.

13
14 V1 The correspondence between a given location in V1 and in the subjective visual field is very precise: even the blind spots are mapped into V1. In human and animals with a fovea in the retina, a large portion of V1 is mapped to the small, central portion of visual field, a phenomenon known as cortical magnification. The neuronal V1 responses can discriminate small changes in visual orientations, spatial frequencies and colors. Furthermore, individual V1 neurons in human and animals with binocular vision have ocular dominance, namely tuning to one of the two eyes. In the spatial domain, the functioning of V1 can be thought of as similar to many spatially local, complex Fourier transforms. Theoretically, these filters together can carry out neuronal processing of spatial frequency, orientation, motion, direction, and speed. V2 V2 is the second major area in the visual cortex, and first region within the visual association area. It receives strong feedforward connections from V1 and sends strong connections to V3, V4, and V5. It also sends strong feedback connections to the V1. Cells in V2 are tuned to simple properties such as orientation, spatial frequency, and color. The responses of many V2 neurons are also modulated by more complex properties, such as the orientation of illusory contours and whether the stimulus is part of the figure or the ground.
15 V4 V4 is the first area in the ventral stream to show strong attentional modulation. Like V1, V4 is tuned for orientation, spatial frequency, and color. Unlike V1, it is tuned for object features of intermediate complexity, like simple geometric shapes (form recognition). Visual area V4 is not tuned for complex objects such as faces. Recent work has shown that V4 exhibits long-term plasticity, is gated by signals coming from the frontal eye fields, shows changes in the spatial profile of its receptive fields with attention, and encodes hazard functions. V5 Visual area V5 appears to process complex visual motion stimuli. It contains many neurons selective for the motion of complex visual features such as line ends, corners (complex objects, such as faces).

16

17

18 Human Physiology in Space" by Barbara F. Lujan and Ronald J. White, 1994

19 Additive color involves the use of colored lights. When combined, the additive primary colors produce the appearance of white. The importance of RGB as a color model is that it relates very closely to the way we perceive color with the r g b receptors in our retinas. Television and computer monitors create color using the primary colors of light. Each pixel on a monitor screen starts out as black. When the red, green and blue phosphors of a pixel are illuminated simultaneously, that pixel becomes white.
20 The CIE 1931 "Standard Observer" is for a 2-degree field of observation based on tables of Guild and Wright. The CIE 1964 "Standard Observer" is for a 10-degree field from the work of Stiles and Burch, and Speranskaya. The experiments leading to the 1931 standard observer were performed using only the fovea, which covers about a 2-degree angle of vision. The 1964 supplementary standard observer was based on color-matching experiments using a 10-degree area on the retina. CIE standard observers are averages based on experiments with small numbers (~15-20) of people with normal color vision. No real observer is probably exactly like the CIE standard observer. The 1964 work included a few foreign post-doctoral fellows but the early work included only Englishmen from the region near to London."
 v = 6y /")
 v = 6Y / (X +")
21 Conversion of 1931 xy coordinates to 1960 uv coordinates: u = 4x / (-2x + 12y + 3) v = 6y / (-2x + 12y + 3) In terms of the tristimulus values X, Y and Z: u = 4X / (X + 15Y +3Z) v = 6Y / (X + 15Y + 3Z)
22 Yellow Color Name RGB CODE HEX # Pale Goldenrod eee8aa Light Goldenrod Yellow fafad2 Light Yellow ffffe0 Yellow ffff00 Gold ffd700 Light Goldenrod eedd82 Goldenrod daa520 Dark Goldenrod b8860b Sample the RGB color model could not reproduce all spectral light without introducing the effect of negative RGB values

23 99CC 66CC 33CC CC99 CC66 CC33 00CC CC00 FFFF 99FF 66FF 33FF FF99 FF66 FF33 00FF FF CCC CCF FFC C00 F00 CC FF HSL Hue, Saturation, Luminescence
24
25
26 f


27 1 1 1 = image object focal length Fstop = focal length / diameter of lens Fstop increments with a doubling of light capture capacity (which is a function of area): n 2 = 1, 1.4, , 4, 5.6, 8, 11, 16, 22, 32 Fstop = 2 aperture for n = 0,1,2,3,4..
28 Typically lenses consist of a number of lens elements with different thicknesses and curvatures, designed so that the combination corrects the imaging defects (aberrations). The focal length of a thick lens is measured from two planes called the principal planes. The thick lens acts as though it were a thin lens placed at the entrance of the lens when considered from the object side, and at the exit of the lens when considered from the image side. The principal planes serve as the reference for the location of the front focal point, back focal point, object and image positions. The lens equation, for the above simple example, operates as though the space between the planes does not exist. In reality, the planes can be crossed inside of the lens or lay entirely outside the physical boundaries of the lens.
 the greater the distance, the larger the FOV.")
29 Field of View (FOV) Is the object area that is focused by the lens onto the image sensor. Typically, the FOV (h x v) should be slightly larger than an area containing all desired features. The FOV can be adjusted by adjusting the camera s distance from the object (working distance) the greater the distance, the larger the FOV. It can also be adjusted by changing the focal length of the lens the longer the lens focal length, the smaller the FOV. The FOV can be calculated using following equations: H = (d0*h/f)-h -> h = - H / (1- d0 / f) V = (d0*v/f)-v -> v = - V / (1- d0 / f) The magnification factor is: H / h or V / v

30 Resolution is the ability of a lens to distinguish two features that are close together. Also, a lens with high resolution will show an edge transition in fewer pixels than a lens with low resolution.


31 Panoromic Imaging:
32 Image carriers Niepce, 1816? paper soaked in silver chloride in camera obscura Daguerre, 1826 mercury fumes on silver platting on copper Legray/Archer, 1850 wet-plate negative/positive process Maddox, 1970 gelatin process (no immediate development req) Eastman, 1889 photographic film Lumiere, 1908 color photographic film CCD, 1970s charge coupled devices (originally designed for low cost memory devices)
33 NTSC (National Television Standards Committee) video format: signal is an interlaced composite video signal of 525 lines and 60 fields per second (30 frames per second), with a bandwidth limited to 4 MHz to fit into a 6 MHz broadcast television channel without interfering with adjacent channels. Starting with rgb data three signals are generated: Y = 0.30R G B (intensity) I = 0.60R G -0.32B Q = 0.21R G B I and Q are 90 degrees out of phase; When viewed in time, one line of a video signal will have 3 characteristics: An average level which fixes the luminance(b/w) signal, an oscillation at 3.58MHz whose magnitude fixes the saturation and whose phase fixes the hue of the color Lines are separated by horizontal sync signal, pages by vertical sync signal; both used to synchronize camera to framegrabber/tvset
34 Time domain representation of ntsc video signal (one horizontal line) V(max) falling edge Time [us] a b c active video information T (53.5 us) a) horizontal sync b) horizontal back porch (no signal) c) horizontal front porch (no signal) T(one line of frame) For NTSC, the line interval is Tl = 1/(30 *525) = 63.5µs. But the horizontal retrace takes Th = 10µs; actual time for scanning each line is T = 53.5µs. The vertical retrace between adjacent fields takes Tv = 1333µs, which is equivalent to the time for 21 scan lines per field * the number of active lines is = 483/frame. The actual vertical retrace only takes the time to scan nine horizontal lines. The remaining time (twelve scan lines) is for broadcasters wishing to transmit additional data in the TV signal (e.g., closed caption, teletext, etc.).
35
36 TABLE 1.1 PARAMETERS OF ANALOG COLOR TV SYSTEMS Parameters NTSC PAL SECAM Field rate Line number/frame Line rate (line/s) 15,750 15,625 15,625 Image aspect ratio 4:3 4:3 4:3 Color coordinate YIQ YUV YDbDr Luminance bandwidth (MHz) , Chrominance bandwidth (MHz) 1.5 (I), 0.5 (Q) 1.3 (U, V) 1.0 (U, V) Color subcarrier (MHz) (Db), 4.41 (Dr) Color modulation QAM QAM FM Audio subcarrier (MHz) , Composite signal bandwidth (MHz) ,
37 CCD: Charge Coupled Device Phillips Research Labs (Sangster/Teer) invent the BucketBrigade Device (transfers packets from one transistor to another) Bell Labs (Boyle/Smith) extend concept by inventing transport mechanism from one capacitor to a second one >> charge coupled device >> a memory device that happens to be sensitive to light JPL initiates Scientific Grade large array CCD program >>first used as image sensors in astronomy
38
39 CCD: Charge Coupled Device per 1/3 inch chip,distributed according to human color sensitivity (more green than red, blue) - light hits array of detector cells with de = h*f - light sensitive diodes, sensitive to R, or G or B band, translate the flux of light energy into electric charge. - electrons freed and stored in potential wells as charge - sequential reading of this charge and conversion to voltage - linear mapping of this voltage to light intensity - filtering and spatial interpolation to derive 3 base color bands - combine the 3 base color bands to represent any color... - scanning the chip line by line results in a video signal
40 CCD performance a function of: - wavelength sensitivity of cells - number of cells/pixels (row x column) - physical size of each pixel (6-20 um) - depth of cell: # of bits to code brightness - noise cancellation techniques
41 Noise Thermal noise: photons and thermal energy can free electrons (>> dark current) Photodiode noise: CCD is impure, imperfect, Q/E not 100% Photon noise: not time constant occurrence Electronics noise: stray capacitance vary effective voltage
42 Source: Kodak CCD Primer, #KCP-001
43 Source: Kodak CCD Primer, #KCP-001

44 Source: Kodak CCD Primer, #KCP-001
45 Charge versus time graphs for an RGB pixel inside a CCD cell
46
 cells to map to a colored pixel value Bayer")
47 Single CCD >> spatial color interpolation - columns of alternating colors - 25% more green >>human vision more sensitive to G - each cell has an intensity value of merge data from N (4) cells to map to a colored pixel value Bayer filter

48 Fuji Film, Super CCD
49 Source: Kodak CCD Primer, #KCP-001
50 On-chip micro lens Color filter Photo shield Poly Silicon Register Sensor SONY HAD sensor, schematic
51 AMTEL TH7887A Area Array CCD Image Sensor 1024x1024
52 Source: Kodak CCD Primer, #KCP-001
53
54 Frame grabber: The frame grabber digitizes the periodic signal into a 2D, rectangular array N x M of integer values, stored in the frame buffer. (conversion from ccd cell values to pixel values)
, image capture (CCD)")

55 Camera: Image formation (lens), image capture (CCD) Reprinted from the January 2001 issue of P HO TONIC S S P E C TR A
56 CMOS: Complementary Metal Oxide Semiconductor advantages: - easier to fabricate (higher volume, higher yield, less demanding A/D and clock circuitry.) -> cheap - lower voltage, lower power consumption -> good for battery operated devices - can be integrated to (other) on board circuitry -> microprocessor control disadvantages: - higher (stationary noise) -> lower image quality - smaller effective sensor area -> lower sensitivity
57 IEEE 1394 (also known as Fire-Wire and i.link ) is an established standard for high-speed digital data transmission. IEEE 1394 combines several advantages if compared with other bus solutions, like high bandwidth (currently up to 800 MBit/s), ease of use without assignment of node IDs or elaborate set up by the enduser, hot-plug capability, and a flexible network topology. Like any other communication standard, IEEE 1394 consists of several protocol layers. The two lower layers (Physical Layer and Link Layer) are realized by application-specific Integrated Circuits, whereas higher layers are implemented in software. This comprises the basic IEEE 1394 Protocol Stack as well as application dependent protocols that use the basic IEEE 1394 stack.

58 IEEE1394 DCAM vs other formats

59

60
 400 Mbps SONY Wfine* ¼\" CCD progressive (H x V) 659 x 494 (H x V) square, 5.6 x 5.")
61 Device type Compliance Interface Speed Sensor type Scanning Effective pixels Pixel shape Color Resolution Optics Focus Iris Horizontal view angle Vertical view angle Coating Picture Modes modes Resolutions Codings IIDC FireWire Digital Camera v 1.04 FireWire, 2 ports ( 6 pins ) 400 Mbps SONY Wfine* ¼" CCD progressive (H x V) 659 x 494 (H x V) square, 5.6 x 5.6 μm Yes, RGB filtering, Bayer TV-lines (H x V) 480 x 480 f 4.65 mm built-in Manual, from 5 mm to infinite Fixed anti-reflective progressive VGA uncompressed, selection by FireWire link 640x480, 320x240, 160x120 YUV, RGB, Monochrome
62
 contained on a C3088 module. With a maximum speed of 16.")

63 CMUcam (Robotics Institute at Carnegie Mellon University) : Scenix (ubicom) SX28AX clocked at 75MHz to retrieve pixel data from an Onmivision OV6620 sensor (352x488 pixels) contained on a C3088 module. With a maximum speed of 16.7fps the camera can track the position and size of a colourful or bright object, measure the RGB or YUV statistics of an image region or automatically acquire and track the first object it senses. (Rs232 or TTL serial port communication protocol; = 1.4Watt)
Machine Vision: Image Formation
 Machine Vision: Image Formation MediaRobotics Lab, Feb 2010 References: Forsyth / Ponce: Computer Vision Horn: Robot Vision Kodak CCD Primer, #KCP-001 Adaptive Fuzzy Color Interpolation, Journal of Electronic
Machine Vision: Image Formation MediaRobotics Lab, Feb 2010 References: Forsyth / Ponce: Computer Vision Horn: Robot Vision Kodak CCD Primer, #KCP-001 Adaptive Fuzzy Color Interpolation, Journal of Electronic
Introduction to Computer Vision
 Introduction to Computer Vision CS / ECE 181B Thursday, April 1, 2004 Course Details HW #0 and HW #1 are available. Course web site http://www.ece.ucsb.edu/~manj/cs181b Syllabus, schedule, lecture notes,
Introduction to Computer Vision CS / ECE 181B Thursday, April 1, 2004 Course Details HW #0 and HW #1 are available. Course web site http://www.ece.ucsb.edu/~manj/cs181b Syllabus, schedule, lecture notes,
LENSES. INEL 6088 Computer Vision
 LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
Visual perception basics. Image aquisition system. IE PŁ P. Strumiłło
 Visual perception basics Image aquisition system Light perception by humans Humans perceive approx. 90% of information about the environment by means of visual system. Efficiency of the human visual system
Visual perception basics Image aquisition system Light perception by humans Humans perceive approx. 90% of information about the environment by means of visual system. Efficiency of the human visual system
VC 14/15 TP2 Image Formation
 VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
General Imaging System
 General Imaging System Lecture Slides ME 4060 Machine Vision and Vision-based Control Chapter 5 Image Sensing and Acquisition By Dr. Debao Zhou 1 2 Light, Color, and Electromagnetic Spectrum Penetrate
General Imaging System Lecture Slides ME 4060 Machine Vision and Vision-based Control Chapter 5 Image Sensing and Acquisition By Dr. Debao Zhou 1 2 Light, Color, and Electromagnetic Spectrum Penetrate
Image Formation: Camera Model
 Image Formation: Camera Model Ruigang Yang COMP 684 Fall 2005, CS684-IBMR Outline Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Digital Image Formation The Human Eye
Image Formation: Camera Model Ruigang Yang COMP 684 Fall 2005, CS684-IBMR Outline Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Digital Image Formation The Human Eye
An Introduction to CCDs. The basic principles of CCD Imaging is explained.
 An Introduction to CCDs. The basic principles of CCD Imaging is explained. Morning Brain Teaser What is a CCD? Charge Coupled Devices (CCDs), invented in the 1970s as memory devices. They improved the
An Introduction to CCDs. The basic principles of CCD Imaging is explained. Morning Brain Teaser What is a CCD? Charge Coupled Devices (CCDs), invented in the 1970s as memory devices. They improved the
Cameras CS / ECE 181B
 Cameras CS / ECE 181B Image Formation Geometry of image formation (Camera models and calibration) Where? Radiometry of image formation How bright? What color? Examples of cameras What is a Camera? A camera
Cameras CS / ECE 181B Image Formation Geometry of image formation (Camera models and calibration) Where? Radiometry of image formation How bright? What color? Examples of cameras What is a Camera? A camera
VC 16/17 TP2 Image Formation
 VC 16/17 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Computer Vision? The Human Visual
VC 16/17 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Computer Vision? The Human Visual
VC 11/12 T2 Image Formation
 VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
Image Formation and Capture
 Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
Image and Multidimensional Signal Processing
 Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Digital Image Fundamentals 2 Digital Image Fundamentals
Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Digital Image Fundamentals 2 Digital Image Fundamentals
EC-433 Digital Image Processing
 EC-433 Digital Image Processing Lecture 2 Digital Image Fundamentals Dr. Arslan Shaukat 1 Fundamental Steps in DIP Image Acquisition An image is captured by a sensor (such as a monochrome or color TV camera)
EC-433 Digital Image Processing Lecture 2 Digital Image Fundamentals Dr. Arslan Shaukat 1 Fundamental Steps in DIP Image Acquisition An image is captured by a sensor (such as a monochrome or color TV camera)
Digital Imaging Rochester Institute of Technology
 Digital Imaging 1999 Rochester Institute of Technology So Far... camera AgX film processing image AgX photographic film captures image formed by the optical elements (lens). Unfortunately, the processing
Digital Imaging 1999 Rochester Institute of Technology So Far... camera AgX film processing image AgX photographic film captures image formed by the optical elements (lens). Unfortunately, the processing
Digital Photographs, Image Sensors and Matrices
 Digital Photographs, Image Sensors and Matrices Digital Camera Image Sensors Electron Counts Checkerboard Analogy Bryce Bayer s Color Filter Array Mosaic. Image Sensor Data to Matrix Data Visualization
Digital Photographs, Image Sensors and Matrices Digital Camera Image Sensors Electron Counts Checkerboard Analogy Bryce Bayer s Color Filter Array Mosaic. Image Sensor Data to Matrix Data Visualization
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Sensors and Image Formation Imaging sensors and models of image formation Coordinate systems Digital
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Sensors and Image Formation Imaging sensors and models of image formation Coordinate systems Digital
Cameras. CSE 455, Winter 2010 January 25, 2010
 Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
Visual Perception. Overview. The Eye. Information Processing by Human Observer
 Visual Perception Spring 06 Instructor: K. J. Ray Liu ECE Department, Univ. of Maryland, College Park Overview Last Class Introduction to DIP/DVP applications and examples Image as a function Concepts
Visual Perception Spring 06 Instructor: K. J. Ray Liu ECE Department, Univ. of Maryland, College Park Overview Last Class Introduction to DIP/DVP applications and examples Image as a function Concepts
COLOR and the human response to light
 COLOR and the human response to light Contents Introduction: The nature of light The physiology of human vision Color Spaces: Linear Artistic View Standard Distances between colors Color in the TV 2 How
COLOR and the human response to light Contents Introduction: The nature of light The physiology of human vision Color Spaces: Linear Artistic View Standard Distances between colors Color in the TV 2 How
Digital Cameras The Imaging Capture Path
 Manchester Group Royal Photographic Society Imaging Science Group Digital Cameras The Imaging Capture Path by Dr. Tony Kaye ASIS FRPS Silver Halide Systems Exposure (film) Processing Digital Capture Imaging
Manchester Group Royal Photographic Society Imaging Science Group Digital Cameras The Imaging Capture Path by Dr. Tony Kaye ASIS FRPS Silver Halide Systems Exposure (film) Processing Digital Capture Imaging
Introduction & Colour
 Introduction & Colour Eric C. McCreath School of Computer Science The Australian National University ACT 0200 Australia ericm@cs.anu.edu.au Overview 2 Computer Graphics Uses (Chapter 1) Basic Hardware
Introduction & Colour Eric C. McCreath School of Computer Science The Australian National University ACT 0200 Australia ericm@cs.anu.edu.au Overview 2 Computer Graphics Uses (Chapter 1) Basic Hardware
University Of Lübeck ISNM Presented by: Omar A. Hanoun
 University Of Lübeck ISNM 12.11.2003 Presented by: Omar A. Hanoun What Is CCD? Image Sensor: solid-state device used in digital cameras to capture and store an image. Photosites: photosensitive diodes
University Of Lübeck ISNM 12.11.2003 Presented by: Omar A. Hanoun What Is CCD? Image Sensor: solid-state device used in digital cameras to capture and store an image. Photosites: photosensitive diodes
Image and video processing (EBU723U) Colour Images. Dr. Yi-Zhe Song
 Colour Images. Dr. Yi-Zhe Song") Image and video processing () Colour Images Dr. Yi-Zhe Song yizhe.song@qmul.ac.uk Today s agenda Colour spaces Colour images PGM/PPM images Today s agenda Colour spaces Colour images PGM/PPM images History
Image and video processing () Colour Images Dr. Yi-Zhe Song yizhe.song@qmul.ac.uk Today s agenda Colour spaces Colour images PGM/PPM images Today s agenda Colour spaces Colour images PGM/PPM images History
Multimedia Systems Color Space Mahdi Amiri March 2012 Sharif University of Technology
 Course Presentation Multimedia Systems Color Space Mahdi Amiri March 2012 Sharif University of Technology Physics of Color Light Light or visible light is the portion of electromagnetic radiation that
Course Presentation Multimedia Systems Color Space Mahdi Amiri March 2012 Sharif University of Technology Physics of Color Light Light or visible light is the portion of electromagnetic radiation that
The Xiris Glossary of Machine Vision Terminology
 X The Xiris Glossary of Machine Vision Terminology 2 Introduction Automated welding, camera technology, and digital image processing are all complex subjects. When you combine them in a system featuring
X The Xiris Glossary of Machine Vision Terminology 2 Introduction Automated welding, camera technology, and digital image processing are all complex subjects. When you combine them in a system featuring
Mahdi Amiri. March Sharif University of Technology
 Course Presentation Multimedia Systems Color Space Mahdi Amiri March 2014 Sharif University of Technology The wavelength λ of a sinusoidal waveform traveling at constant speed ν is given by Physics of
Course Presentation Multimedia Systems Color Space Mahdi Amiri March 2014 Sharif University of Technology The wavelength λ of a sinusoidal waveform traveling at constant speed ν is given by Physics of
Digital Photographs and Matrices
 Digital Photographs and Matrices Digital Camera Image Sensors Electron Counts Checkerboard Analogy Bryce Bayer s Color Filter Array Mosaic. Image Sensor Data to Matrix Data Visualization of Matrix Addition
Digital Photographs and Matrices Digital Camera Image Sensors Electron Counts Checkerboard Analogy Bryce Bayer s Color Filter Array Mosaic. Image Sensor Data to Matrix Data Visualization of Matrix Addition
Capturing Light in man and machine
 Capturing Light in man and machine 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Image Formation Digital Camera Film The Eye Digital camera A digital camera replaces film with a sensor
Capturing Light in man and machine 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Image Formation Digital Camera Film The Eye Digital camera A digital camera replaces film with a sensor
Building a Real Camera
 Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
Megapixels and more. The basics of image processing in digital cameras. Construction of a digital camera
 Megapixels and more The basics of image processing in digital cameras Photography is a technique of preserving pictures with the help of light. The first durable photograph was made by Nicephor Niepce
Megapixels and more The basics of image processing in digital cameras Photography is a technique of preserving pictures with the help of light. The first durable photograph was made by Nicephor Niepce
Cameras, lenses and sensors
 Cameras, lenses and sensors Marc Pollefeys COMP 256 Cameras, lenses and sensors Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Sensing The Human Eye Reading: Chapter.
Cameras, lenses and sensors Marc Pollefeys COMP 256 Cameras, lenses and sensors Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Sensing The Human Eye Reading: Chapter.
CCDS. Lesson I. Wednesday, August 29, 12
 CCDS Lesson I CCD OPERATION The predecessor of the CCD was a device called the BUCKET BRIGADE DEVICE developed at the Phillips Research Labs The BBD was an analog delay line, made up of capacitors such
CCDS Lesson I CCD OPERATION The predecessor of the CCD was a device called the BUCKET BRIGADE DEVICE developed at the Phillips Research Labs The BBD was an analog delay line, made up of capacitors such
COLOR. and the human response to light
 COLOR and the human response to light Contents Introduction: The nature of light The physiology of human vision Color Spaces: Linear Artistic View Standard Distances between colors Color in the TV 2 Amazing
COLOR and the human response to light Contents Introduction: The nature of light The physiology of human vision Color Spaces: Linear Artistic View Standard Distances between colors Color in the TV 2 Amazing
Detectors for microscopy - CCDs, APDs and PMTs. Antonia Göhler. Nov 2014
 Detectors for microscopy - CCDs, APDs and PMTs Antonia Göhler Nov 2014 Detectors/Sensors in general are devices that detect events or changes in quantities (intensities) and provide a corresponding output,
Detectors for microscopy - CCDs, APDs and PMTs Antonia Göhler Nov 2014 Detectors/Sensors in general are devices that detect events or changes in quantities (intensities) and provide a corresponding output,
Visual Perception. human perception display devices. CS Visual Perception
 Visual Perception human perception display devices 1 Reference Chapters 4, 5 Designing with the Mind in Mind by Jeff Johnson 2 Visual Perception Most user interfaces are visual in nature. So, it is important
Visual Perception human perception display devices 1 Reference Chapters 4, 5 Designing with the Mind in Mind by Jeff Johnson 2 Visual Perception Most user interfaces are visual in nature. So, it is important
The Charge-Coupled Device. Many overheads courtesy of Simon Tulloch
 The Charge-Coupled Device Astronomy 1263 Many overheads courtesy of Simon Tulloch smt@ing.iac.es Jan 24, 2013 What does a CCD Look Like? The fine surface electrode structure of a thick CCD is clearly visible
The Charge-Coupled Device Astronomy 1263 Many overheads courtesy of Simon Tulloch smt@ing.iac.es Jan 24, 2013 What does a CCD Look Like? The fine surface electrode structure of a thick CCD is clearly visible
Introduction to Visual Perception & the EM Spectrum
 , Winter 2005 Digital Image Fundamentals: Visual Perception & the EM Spectrum, Image Acquisition, Sampling & Quantization Monday, September 19 2004 Overview (1): Review Some questions to consider Elements
, Winter 2005 Digital Image Fundamentals: Visual Perception & the EM Spectrum, Image Acquisition, Sampling & Quantization Monday, September 19 2004 Overview (1): Review Some questions to consider Elements
Review. Introduction to Visual Perception & the EM Spectrum. Overview (1):
:") Overview (1): Review Some questions to consider Winter 2005 Digital Image Fundamentals: Visual Perception & the EM Spectrum, Image Acquisition, Sampling & Quantization Tuesday, January 17 2006 Elements
Overview (1): Review Some questions to consider Winter 2005 Digital Image Fundamentals: Visual Perception & the EM Spectrum, Image Acquisition, Sampling & Quantization Tuesday, January 17 2006 Elements
Image Perception & 2D Images
 Image Perception & 2D Images Vision is a matter of perception. Perception is a matter of vision. ES Overview Introduction to ES 2D Graphics in Entertainment Systems Sound, Speech & Music 3D Graphics in
Image Perception & 2D Images Vision is a matter of perception. Perception is a matter of vision. ES Overview Introduction to ES 2D Graphics in Entertainment Systems Sound, Speech & Music 3D Graphics in
A new Photon Counting Detector: Intensified CMOS- APS
 A new Photon Counting Detector: Intensified CMOS- APS M. Belluso 1, G. Bonanno 1, A. Calì 1, A. Carbone 3, R. Cosentino 1, A. Modica 4, S. Scuderi 1, C. Timpanaro 1, M. Uslenghi 2 1- I.N.A.F.-Osservatorio
A new Photon Counting Detector: Intensified CMOS- APS M. Belluso 1, G. Bonanno 1, A. Calì 1, A. Carbone 3, R. Cosentino 1, A. Modica 4, S. Scuderi 1, C. Timpanaro 1, M. Uslenghi 2 1- I.N.A.F.-Osservatorio
A new Photon Counting Detector: Intensified CMOS- APS
 A new Photon Counting Detector: Intensified CMOS- APS M. Belluso 1, G. Bonanno 1, A. Calì 1, A. Carbone 3, R. Cosentino 1, A. Modica 4, S. Scuderi 1, C. Timpanaro 1, M. Uslenghi 2 1-I.N.A.F.-Osservatorio
A new Photon Counting Detector: Intensified CMOS- APS M. Belluso 1, G. Bonanno 1, A. Calì 1, A. Carbone 3, R. Cosentino 1, A. Modica 4, S. Scuderi 1, C. Timpanaro 1, M. Uslenghi 2 1-I.N.A.F.-Osservatorio
Building a Real Camera. Slides Credit: Svetlana Lazebnik
 Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 4a: Cameras Source: S. Lazebnik Reading Szeliski chapter 2.2.3, 2.3 Image formation Let s design a camera Idea 1: put a piece of film in front of an object
CS6670: Computer Vision Noah Snavely Lecture 4a: Cameras Source: S. Lazebnik Reading Szeliski chapter 2.2.3, 2.3 Image formation Let s design a camera Idea 1: put a piece of film in front of an object
Basic principles of photography. David Capel 346B IST
 Basic principles of photography David Capel 346B IST Latin Camera Obscura = Dark Room Light passing through a small hole produces an inverted image on the opposite wall Safely observing the solar eclipse
Basic principles of photography David Capel 346B IST Latin Camera Obscura = Dark Room Light passing through a small hole produces an inverted image on the opposite wall Safely observing the solar eclipse
Advanced Camera and Image Sensor Technology. Steve Kinney Imaging Professional Camera Link Chairman
 Advanced Camera and Image Sensor Technology Steve Kinney Imaging Professional Camera Link Chairman Content Physical model of a camera Definition of various parameters for EMVA1288 EMVA1288 and image quality
Advanced Camera and Image Sensor Technology Steve Kinney Imaging Professional Camera Link Chairman Content Physical model of a camera Definition of various parameters for EMVA1288 EMVA1288 and image quality
DIGITAL IMAGE PROCESSING (COM-3371) Week 2 - January 14, 2002
 Week 2 - January 14, 2002") DIGITAL IMAGE PROCESSING (COM-3371) Week 2 - January 14, 22 Topics: Human eye Visual phenomena Simple image model Image enhancement Point processes Histogram Lookup tables Contrast compression and stretching
DIGITAL IMAGE PROCESSING (COM-3371) Week 2 - January 14, 22 Topics: Human eye Visual phenomena Simple image model Image enhancement Point processes Histogram Lookup tables Contrast compression and stretching
Cvision 2. António J. R. Neves João Paulo Silva Cunha. Bernardo Cunha. IEETA / Universidade de Aveiro
 Cvision 2 Digital Imaging António J. R. Neves (an@ua.pt) & João Paulo Silva Cunha & Bernardo Cunha IEETA / Universidade de Aveiro Outline Image sensors Camera calibration Sampling and quantization Data
Cvision 2 Digital Imaging António J. R. Neves (an@ua.pt) & João Paulo Silva Cunha & Bernardo Cunha IEETA / Universidade de Aveiro Outline Image sensors Camera calibration Sampling and quantization Data
Image Formation and Capture. Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen
 Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
Image acquisition. In both cases, the digital sensing element is one of the following: Line array Area array. Single sensor
 Image acquisition Digital images are acquired by direct digital acquisition (digital still/video cameras), or scanning material acquired as analog signals (slides, photographs, etc.). In both cases, the
Image acquisition Digital images are acquired by direct digital acquisition (digital still/video cameras), or scanning material acquired as analog signals (slides, photographs, etc.). In both cases, the
Light. intensity wavelength. Light is electromagnetic waves Laser is light that contains only a narrow spectrum of frequencies
 Image formation World, image, eye Light Light is electromagnetic waves Laser is light that contains only a narrow spectrum of frequencies intensity wavelength Visible light is light with wavelength from
Image formation World, image, eye Light Light is electromagnetic waves Laser is light that contains only a narrow spectrum of frequencies intensity wavelength Visible light is light with wavelength from
Where Vision and Silicon Meet
 History and Future of Electronic Color Photography: Where Vision and Silicon Meet Richard F. Lyon Chief Scientist Foveon, Inc. UC Berkeley Photography class of Prof. Brian Barksy February 20, 2004 Color
History and Future of Electronic Color Photography: Where Vision and Silicon Meet Richard F. Lyon Chief Scientist Foveon, Inc. UC Berkeley Photography class of Prof. Brian Barksy February 20, 2004 Color
Lecture 8. Color Image Processing
 Lecture 8. Color Image Processing EL512 Image Processing Dr. Zhu Liu zliu@research.att.com Note: Part of the materials in the slides are from Gonzalez s Digital Image Processing and Onur s lecture slides
Lecture 8. Color Image Processing EL512 Image Processing Dr. Zhu Liu zliu@research.att.com Note: Part of the materials in the slides are from Gonzalez s Digital Image Processing and Onur s lecture slides
Bettina Selig. Centre for Image Analysis. Swedish University of Agricultural Sciences Uppsala University
 2011-10-26 Bettina Selig Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Electromagnetic Radiation Illumination - Reflection - Detection The Human Eye Digital
2011-10-26 Bettina Selig Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Electromagnetic Radiation Illumination - Reflection - Detection The Human Eye Digital
Photons and solid state detection
 Photons and solid state detection Photons represent discrete packets ( quanta ) of optical energy Energy is hc/! (h: Planck s constant, c: speed of light,! : wavelength) For solid state detection, photons
Photons and solid state detection Photons represent discrete packets ( quanta ) of optical energy Energy is hc/! (h: Planck s constant, c: speed of light,! : wavelength) For solid state detection, photons
History and Future of Electronic Color Photography: Where Vision and Silicon Meet
 History and Future of Electronic Color Photography: Where Vision and Silicon Meet Richard F. Lyon Chief Scientist Foveon, Inc. UC Berkeley Photography class of Prof. Brian Barksy February 20, 2004 Color
History and Future of Electronic Color Photography: Where Vision and Silicon Meet Richard F. Lyon Chief Scientist Foveon, Inc. UC Berkeley Photography class of Prof. Brian Barksy February 20, 2004 Color
EECS490: Digital Image Processing. Lecture #12
 Lecture #12 Image Correlation (example) Color basics (Chapter 6) The Chromaticity Diagram Color Images RGB Color Cube Color spaces Pseudocolor Multispectral Imaging White Light A prism splits white light
Lecture #12 Image Correlation (example) Color basics (Chapter 6) The Chromaticity Diagram Color Images RGB Color Cube Color spaces Pseudocolor Multispectral Imaging White Light A prism splits white light
Charged Coupled Device (CCD) S.Vidhya
 S.Vidhya") Charged Coupled Device (CCD) S.Vidhya 02.04.2016 Sensor Physical phenomenon Sensor Measurement Output A sensor is a device that measures a physical quantity and converts it into a signal which can be read
Charged Coupled Device (CCD) S.Vidhya 02.04.2016 Sensor Physical phenomenon Sensor Measurement Output A sensor is a device that measures a physical quantity and converts it into a signal which can be read
CPSC 4040/6040 Computer Graphics Images. Joshua Levine
 CPSC 4040/6040 Computer Graphics Images Joshua Levine levinej@clemson.edu Lecture 04 Displays and Optics Sept. 1, 2015 Slide Credits: Kenny A. Hunt Don House Torsten Möller Hanspeter Pfister Agenda Open
CPSC 4040/6040 Computer Graphics Images Joshua Levine levinej@clemson.edu Lecture 04 Displays and Optics Sept. 1, 2015 Slide Credits: Kenny A. Hunt Don House Torsten Möller Hanspeter Pfister Agenda Open
Chapter 2: Digital Image Fundamentals. Digital image processing is based on. Mathematical and probabilistic models Human intuition and analysis
 Chapter 2: Digital Image Fundamentals Digital image processing is based on Mathematical and probabilistic models Human intuition and analysis 2.1 Visual Perception How images are formed in the eye? Eye
Chapter 2: Digital Image Fundamentals Digital image processing is based on Mathematical and probabilistic models Human intuition and analysis 2.1 Visual Perception How images are formed in the eye? Eye
Image Processing for Mechatronics Engineering For senior undergraduate students Academic Year 2017/2018, Winter Semester
 Image Processing for Mechatronics Engineering For senior undergraduate students Academic Year 2017/2018, Winter Semester Lecture 8: Color Image Processing 04.11.2017 Dr. Mohammed Abdel-Megeed Salem Media
Image Processing for Mechatronics Engineering For senior undergraduate students Academic Year 2017/2018, Winter Semester Lecture 8: Color Image Processing 04.11.2017 Dr. Mohammed Abdel-Megeed Salem Media
IMAGES AND COLOR. N. C. State University. CSC557 Multimedia Computing and Networking. Fall Lecture # 10
 IMAGES AND COLOR N. C. State University CSC557 Multimedia Computing and Networking Fall 2001 Lecture # 10 IMAGES AND COLOR N. C. State University CSC557 Multimedia Computing and Networking Fall 2001 Lecture
IMAGES AND COLOR N. C. State University CSC557 Multimedia Computing and Networking Fall 2001 Lecture # 10 IMAGES AND COLOR N. C. State University CSC557 Multimedia Computing and Networking Fall 2001 Lecture
Digital Image Processing Lec 02 - Image Formation - Color Space
 DIP-AMA, Fall 2018 Digital Image Processing Lec 02 - Image Formation - Color Space Zhu Li Dept of CSEE, UMKC Office: FH560E, Email: lizhu@umkc.edu, Ph: x 2346. http://l.web.umkc.edu/lizhu p.1 Outline Recap
DIP-AMA, Fall 2018 Digital Image Processing Lec 02 - Image Formation - Color Space Zhu Li Dept of CSEE, UMKC Office: FH560E, Email: lizhu@umkc.edu, Ph: x 2346. http://l.web.umkc.edu/lizhu p.1 Outline Recap
CS 565 Computer Vision. Nazar Khan PUCIT Lecture 4: Colour
 CS 565 Computer Vision Nazar Khan PUCIT Lecture 4: Colour Topics to be covered Motivation for Studying Colour Physical Background Biological Background Technical Colour Spaces Motivation Colour science
CS 565 Computer Vision Nazar Khan PUCIT Lecture 4: Colour Topics to be covered Motivation for Studying Colour Physical Background Biological Background Technical Colour Spaces Motivation Colour science
Introduction to the operating principles of the HyperFine spectrometer
 Introduction to the operating principles of the HyperFine spectrometer LightMachinery Inc., 80 Colonnade Road North, Ottawa ON Canada A spectrometer is an optical instrument designed to split light into
Introduction to the operating principles of the HyperFine spectrometer LightMachinery Inc., 80 Colonnade Road North, Ottawa ON Canada A spectrometer is an optical instrument designed to split light into
Capturing Light in man and machine. Some figures from Steve Seitz, Steve Palmer, Paul Debevec, and Gonzalez et al.
 Capturing Light in man and machine Some figures from Steve Seitz, Steve Palmer, Paul Debevec, and Gonzalez et al. 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Image Formation Digital
Capturing Light in man and machine Some figures from Steve Seitz, Steve Palmer, Paul Debevec, and Gonzalez et al. 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Image Formation Digital
Lecture 3: Grey and Color Image Processing
 I22: Digital Image processing Lecture 3: Grey and Color Image Processing Prof. YingLi Tian Sept. 13, 217 Department of Electrical Engineering The City College of New York The City University of New York
I22: Digital Image processing Lecture 3: Grey and Color Image Processing Prof. YingLi Tian Sept. 13, 217 Department of Electrical Engineering The City College of New York The City University of New York
OPTICAL SYSTEMS OBJECTIVES
 101 L7 OPTICAL SYSTEMS OBJECTIVES Aims Your aim here should be to acquire a working knowledge of the basic components of optical systems and understand their purpose, function and limitations in terms
101 L7 OPTICAL SYSTEMS OBJECTIVES Aims Your aim here should be to acquire a working knowledge of the basic components of optical systems and understand their purpose, function and limitations in terms
EE 392B: Course Introduction
 EE 392B Course Introduction About EE392B Goals Topics Schedule Prerequisites Course Overview Digital Imaging System Image Sensor Architectures Nonidealities and Performance Measures Color Imaging Recent
EE 392B Course Introduction About EE392B Goals Topics Schedule Prerequisites Course Overview Digital Imaging System Image Sensor Architectures Nonidealities and Performance Measures Color Imaging Recent
Ultra-high resolution 14,400 pixel trilinear color image sensor
 Ultra-high resolution 14,400 pixel trilinear color image sensor Thomas Carducci, Antonio Ciccarelli, Brent Kecskemety Microelectronics Technology Division Eastman Kodak Company, Rochester, New York 14650-2008
Ultra-high resolution 14,400 pixel trilinear color image sensor Thomas Carducci, Antonio Ciccarelli, Brent Kecskemety Microelectronics Technology Division Eastman Kodak Company, Rochester, New York 14650-2008
the need for an intensifier
 * The LLLCCD : Low Light Imaging without the need for an intensifier Paul Jerram, Peter Pool, Ray Bell, David Burt, Steve Bowring, Simon Spencer, Mike Hazelwood, Ian Moody, Neil Catlett, Philip Heyes Marconi
* The LLLCCD : Low Light Imaging without the need for an intensifier Paul Jerram, Peter Pool, Ray Bell, David Burt, Steve Bowring, Simon Spencer, Mike Hazelwood, Ian Moody, Neil Catlett, Philip Heyes Marconi
Lecture 2 Digital Image Fundamentals. Lin ZHANG, PhD School of Software Engineering Tongji University Fall 2016
 Lecture 2 Digital Image Fundamentals Lin ZHANG, PhD School of Software Engineering Tongji University Fall 2016 Contents Elements of visual perception Light and the electromagnetic spectrum Image sensing
Lecture 2 Digital Image Fundamentals Lin ZHANG, PhD School of Software Engineering Tongji University Fall 2016 Contents Elements of visual perception Light and the electromagnetic spectrum Image sensing
IMAGE SENSOR SOLUTIONS. KAC-96-1/5" Lens Kit. KODAK KAC-96-1/5" Lens Kit. for use with the KODAK CMOS Image Sensors. November 2004 Revision 2
 KODAK for use with the KODAK CMOS Image Sensors November 2004 Revision 2 1.1 Introduction Choosing the right lens is a critical aspect of designing an imaging system. Typically the trade off between image
KODAK for use with the KODAK CMOS Image Sensors November 2004 Revision 2 1.1 Introduction Choosing the right lens is a critical aspect of designing an imaging system. Typically the trade off between image
Digital Image Processing. Lecture # 8 Color Processing
 Digital Image Processing Lecture # 8 Color Processing 1 COLOR IMAGE PROCESSING COLOR IMAGE PROCESSING Color Importance Color is an excellent descriptor Suitable for object Identification and Extraction
Digital Image Processing Lecture # 8 Color Processing 1 COLOR IMAGE PROCESSING COLOR IMAGE PROCESSING Color Importance Color is an excellent descriptor Suitable for object Identification and Extraction
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 2 Aug 24 th, 2017 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor TA Digital Image Processing COSC 6380/4393 Pranav Mantini
Digital Image Processing COSC 6380/4393 Lecture 2 Aug 24 th, 2017 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor TA Digital Image Processing COSC 6380/4393 Pranav Mantini
Wireless Communication
 Wireless Communication Systems @CS.NCTU Lecture 4: Color Instructor: Kate Ching-Ju Lin ( 林靖茹 ) Chap. 4 of Fundamentals of Multimedia Some reference from http://media.ee.ntu.edu.tw/courses/dvt/15f/ 1 Outline
Wireless Communication Systems @CS.NCTU Lecture 4: Color Instructor: Kate Ching-Ju Lin ( 林靖茹 ) Chap. 4 of Fundamentals of Multimedia Some reference from http://media.ee.ntu.edu.tw/courses/dvt/15f/ 1 Outline
Light. Path of Light. Looking at things. Depth and Distance. Getting light to imager. CS559 Lecture 2 Lights, Cameras, Eyes
 CS559 Lecture 2 Lights, Cameras, Eyes These are course notes (not used as slides) Written by Mike Gleicher, Sept. 2005 Adjusted after class stuff we didn t get to removed / mistakes fixed Light Electromagnetic
CS559 Lecture 2 Lights, Cameras, Eyes These are course notes (not used as slides) Written by Mike Gleicher, Sept. 2005 Adjusted after class stuff we didn t get to removed / mistakes fixed Light Electromagnetic
Unit 1: Image Formation
 Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
HR2000+ Spectrometer. User-Configured for Flexibility. now with. Spectrometers
 Spectrometers HR2000+ Spectrometer User-Configured for Flexibility HR2000+ One of our most popular items, the HR2000+ Spectrometer features a high-resolution optical bench, a powerful 2-MHz analog-to-digital
Spectrometers HR2000+ Spectrometer User-Configured for Flexibility HR2000+ One of our most popular items, the HR2000+ Spectrometer features a high-resolution optical bench, a powerful 2-MHz analog-to-digital
Digital Imaging with the Nikon D1X and D100 cameras. A tutorial with Simon Stafford
 Digital Imaging with the Nikon D1X and D100 cameras A tutorial with Simon Stafford Contents Fundamental issues of Digital Imaging Camera controls Practical Issues Questions & Answers (hopefully!) Digital
Digital Imaging with the Nikon D1X and D100 cameras A tutorial with Simon Stafford Contents Fundamental issues of Digital Imaging Camera controls Practical Issues Questions & Answers (hopefully!) Digital
Introduction. Prof. Lina Karam School of Electrical, Computer, & Energy Engineering Arizona State University
 EEE 508 - Digital Image & Video Processing and Compression http://lina.faculty.asu.edu/eee508/ Introduction Prof. Lina Karam School of Electrical, Computer, & Energy Engineering Arizona State University
EEE 508 - Digital Image & Video Processing and Compression http://lina.faculty.asu.edu/eee508/ Introduction Prof. Lina Karam School of Electrical, Computer, & Energy Engineering Arizona State University
STA1600LN x Element Image Area CCD Image Sensor
 ST600LN 10560 x 10560 Element Image Area CCD Image Sensor FEATURES 10560 x 10560 Photosite Full Frame CCD Array 9 m x 9 m Pixel 95.04mm x 95.04mm Image Area 100% Fill Factor Readout Noise 2e- at 50kHz
ST600LN 10560 x 10560 Element Image Area CCD Image Sensor FEATURES 10560 x 10560 Photosite Full Frame CCD Array 9 m x 9 m Pixel 95.04mm x 95.04mm Image Area 100% Fill Factor Readout Noise 2e- at 50kHz
Basic Microprocessor Interfacing Trainer Lab Manual
 Basic Microprocessor Interfacing Trainer Lab Manual Control Inputs Microprocessor Data Inputs ff Control Unit '0' Datapath MUX Nextstate Logic State Memory Register Output Logic Control Signals ALU ff
Basic Microprocessor Interfacing Trainer Lab Manual Control Inputs Microprocessor Data Inputs ff Control Unit '0' Datapath MUX Nextstate Logic State Memory Register Output Logic Control Signals ALU ff
Vision. The eye. Image formation. Eye defects & corrective lenses. Visual acuity. Colour vision. Lecture 3.5
 Lecture 3.5 Vision The eye Image formation Eye defects & corrective lenses Visual acuity Colour vision Vision http://www.wired.com/wiredscience/2009/04/schizoillusion/ Perception of light--- eye-brain
Lecture 3.5 Vision The eye Image formation Eye defects & corrective lenses Visual acuity Colour vision Vision http://www.wired.com/wiredscience/2009/04/schizoillusion/ Perception of light--- eye-brain
LED Tester BTS256-LED
 1 LED Tester BTS256-LED The BTS256-LED tester is one of the most compact light measurement devices with integrated integrating sphere for high accuracy measurement of luminous flux, spectral and color
1 LED Tester BTS256-LED The BTS256-LED tester is one of the most compact light measurement devices with integrated integrating sphere for high accuracy measurement of luminous flux, spectral and color
FUTURE PROSPECTS FOR CMOS ACTIVE PIXEL SENSORS
 FUTURE PROSPECTS FOR CMOS ACTIVE PIXEL SENSORS Dr. Eric R. Fossum Jet Propulsion Laboratory Dr. Philip H-S. Wong IBM Research 1995 IEEE Workshop on CCDs and Advanced Image Sensors April 21, 1995 CMOS APS
FUTURE PROSPECTS FOR CMOS ACTIVE PIXEL SENSORS Dr. Eric R. Fossum Jet Propulsion Laboratory Dr. Philip H-S. Wong IBM Research 1995 IEEE Workshop on CCDs and Advanced Image Sensors April 21, 1995 CMOS APS
Getting light to imager. Capturing Images. Depth and Distance. Ideal Imaging. CS559 Lecture 2 Lights, Cameras, Eyes
 CS559 Lecture 2 Lights, Cameras, Eyes Last time: what is an image idea of image-based (raster representation) Today: image capture/acquisition, focus cameras and eyes displays and intensities Corrected
CS559 Lecture 2 Lights, Cameras, Eyes Last time: what is an image idea of image-based (raster representation) Today: image capture/acquisition, focus cameras and eyes displays and intensities Corrected
Multispectral. imaging device. ADVANCED LIGHT ANALYSIS by. Most accurate homogeneity MeasureMent of spectral radiance. UMasterMS1 & UMasterMS2
 Multispectral imaging device Most accurate homogeneity MeasureMent of spectral radiance UMasterMS1 & UMasterMS2 ADVANCED LIGHT ANALYSIS by UMaster Ms Multispectral Imaging Device UMaster MS Description
Multispectral imaging device Most accurate homogeneity MeasureMent of spectral radiance UMasterMS1 & UMasterMS2 ADVANCED LIGHT ANALYSIS by UMaster Ms Multispectral Imaging Device UMaster MS Description
CS 443: Imaging and Multimedia Cameras and Lenses
 CS 443: Imaging and Multimedia Cameras and Lenses Spring 2008 Ahmed Elgammal Dept of Computer Science Rutgers University Outlines Cameras and lenses! 1 They are formed by the projection of 3D objects.
CS 443: Imaging and Multimedia Cameras and Lenses Spring 2008 Ahmed Elgammal Dept of Computer Science Rutgers University Outlines Cameras and lenses! 1 They are formed by the projection of 3D objects.
Capturing Light in man and machine
 Capturing Light in man and machine CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2014 Etymology PHOTOGRAPHY light drawing / writing Image Formation Digital Camera
Capturing Light in man and machine CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2014 Etymology PHOTOGRAPHY light drawing / writing Image Formation Digital Camera
Light gathering Power: Magnification with eyepiece:
 Telescopes Light gathering Power: The amount of light that can be gathered by a telescope in a given amount of time: t 1 /t 2 = (D 2 /D 1 ) 2 The larger the diameter the smaller the amount of time. If
Telescopes Light gathering Power: The amount of light that can be gathered by a telescope in a given amount of time: t 1 /t 2 = (D 2 /D 1 ) 2 The larger the diameter the smaller the amount of time. If
Measuring intensity in watts rather than lumens
 Specialist Article Appeared in: Markt & Technik Issue: 43 / 2013 Measuring intensity in watts rather than lumens Authors: David Schreiber, Developer Lighting and Claudius Piske, Development Engineer Hardware
Specialist Article Appeared in: Markt & Technik Issue: 43 / 2013 Measuring intensity in watts rather than lumens Authors: David Schreiber, Developer Lighting and Claudius Piske, Development Engineer Hardware
STUDY NOTES UNIT I IMAGE PERCEPTION AND SAMPLING. Elements of Digital Image Processing Systems. Elements of Visual Perception structure of human eye
 DIGITAL IMAGE PROCESSING STUDY NOTES UNIT I IMAGE PERCEPTION AND SAMPLING Elements of Digital Image Processing Systems Elements of Visual Perception structure of human eye light, luminance, brightness
DIGITAL IMAGE PROCESSING STUDY NOTES UNIT I IMAGE PERCEPTION AND SAMPLING Elements of Digital Image Processing Systems Elements of Visual Perception structure of human eye light, luminance, brightness
Overview. Charge-coupled Devices. MOS capacitor. Charge-coupled devices. Charge-coupled devices:
 Overview Charge-coupled Devices Charge-coupled devices: MOS capacitors Charge transfer Architectures Color Limitations 1 2 Charge-coupled devices MOS capacitor The most popular image recording technology
Overview Charge-coupled Devices Charge-coupled devices: MOS capacitors Charge transfer Architectures Color Limitations 1 2 Charge-coupled devices MOS capacitor The most popular image recording technology
Human Visual System. Digital Image Processing. Digital Image Fundamentals. Structure Of The Human Eye. Blind-Spot Experiment.
 Digital Image Processing Digital Imaging Fundamentals Christophoros Nikou cnikou@cs.uoi.gr 4 Human Visual System The best vision model we have! Knowledge of how images form in the eye can help us with
Digital Image Processing Digital Imaging Fundamentals Christophoros Nikou cnikou@cs.uoi.gr 4 Human Visual System The best vision model we have! Knowledge of how images form in the eye can help us with
Introduction to Color Theory
 Systems & Biomedical Engineering Department SBE 306B: Computer Systems III (Computer Graphics) Dr. Ayman Eldeib Spring 2018 Introduction to With colors you can set a mood, attract attention, or make a
Systems & Biomedical Engineering Department SBE 306B: Computer Systems III (Computer Graphics) Dr. Ayman Eldeib Spring 2018 Introduction to With colors you can set a mood, attract attention, or make a
Sensors and Sensing Cameras and Camera Calibration
 Sensors and Sensing Cameras and Camera Calibration Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 20.11.2014
Sensors and Sensing Cameras and Camera Calibration Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 20.11.2014
Digital Image Processing
 Digital Image Processing Digital Imaging Fundamentals Christophoros Nikou cnikou@cs.uoi.gr Images taken from: R. Gonzalez and R. Woods. Digital Image Processing, Prentice Hall, 2008. Digital Image Processing
Digital Image Processing Digital Imaging Fundamentals Christophoros Nikou cnikou@cs.uoi.gr Images taken from: R. Gonzalez and R. Woods. Digital Image Processing, Prentice Hall, 2008. Digital Image Processing
Improved sensitivity high-definition interline CCD using the KODAK TRUESENSE Color Filter Pattern
 Improved sensitivity high-definition interline CCD using the KODAK TRUESENSE Color Filter Pattern James DiBella*, Marco Andreghetti, Amy Enge, William Chen, Timothy Stanka, Robert Kaser (Eastman Kodak
Improved sensitivity high-definition interline CCD using the KODAK TRUESENSE Color Filter Pattern James DiBella*, Marco Andreghetti, Amy Enge, William Chen, Timothy Stanka, Robert Kaser (Eastman Kodak
Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors
 Cameras Lenses & Sensors") Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors Guido Gerig CS-GY 6643, Spring 2017 (slides modified from Marc Pollefeys, UNC Chapel Hill/ ETH Zurich, With content from Prof. Trevor
Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors Guido Gerig CS-GY 6643, Spring 2017 (slides modified from Marc Pollefeys, UNC Chapel Hill/ ETH Zurich, With content from Prof. Trevor