Development of an Open Source Multi GNSS Data Processing Software
|
|
|
- Tobias Harper
- 5 years ago
- Views:
Transcription
1 2nd Asia Oceania Regional Workshop on GNSS 2010 Development of an Open Source Multi GNSS Data Processing Software Tomoji TAKASU Tokyo University of Marine Science and Technology
2 Contents Introduction Issues for Multi GNSS Data Processing Standard Data Formats Time/Coordinate Systems Satellite/Receiver Dependent Biases Multi GNSS Implementation in RTKLIB Future Plan Summary 2
3 Introduction 3

 FDMA (,CDMA) 1985 Galileo EU MEO G")


4 GNSS System Develop/ Operation Satellite Orbit G/R Signals Frequency MUX Satellite Launch GPS US MEO G L1,L2,L5, CDMA 1978 GLONASS Russia MEO G L1,L2(,L3) FDMA (,CDMA) 1985 Galileo EU MEO G E1,E5,E6 CDMA 2011 MEO+GEO Compass China +IGSO G B1,B2,B3,L5 B2 B3 CDMA 2007 QZSS Japan IGSO R L1,L2,L5,LEX CDMA 2010 IRNSS India GEO+IGSO R L5,S CDMA 2013? SBAS US,... GEO R L1(,L5) L5) CDMA 4
 24 (+3) 24 (+3) Galileo 0 12 27 (+3) 27 (+3) Compass 5 12 30 35 QZSS 1 3 3 3 IRNSS 0")

5 Satellite Constellation System GPS 31 (+1) GLONASS 23 (+3) 24 (+3) 24 (+3) 24 (+3) Galileo (+3) 27 (+3) Compass QZSS IRNSS SBAS Total L3 Planned GNSS Signal Frequencies L5/E5a E5b L2 L2 E6/LEX L1/E1 L1 (Y.Yang, COMPASS: View on Compatibility and Interoperability, 2009) 5

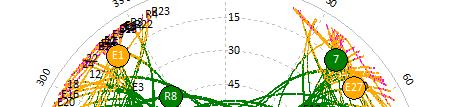
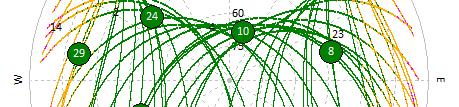
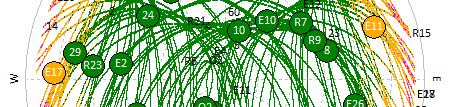


6 Many Visible Satellites Only GPS GPS+GLONASS+Galileo+QZSS We can obtain many benefits by using many GNSSs. However, we must handle complicated data with many signals. 6
7 Issues for Multi GNSS Data Processing 7
8 Data Formats (1/2) Formats Data Type GPS GLO GAL QZSS COMP IRNSS SBAS Raw OBS data No No No 2.11 RINEX 2 Broadcast EPH No No No 2.11 SBAS Message 2.12 Raw OBS data No No No 3.00 RINEX 3 Broadcast EPH No No No 3.00 Precise Clock No No No No No BINEX Raw OBS data??????? Broadcast EPH??????? SP3 PreciseEPH/CLK 3c 3c 3c 3c 3c No No EMS SBAS Message 2.0 ANTEX Antenna PCV
9 Data Formats (2/2) Formats Data Type GPS GLO GAL QZSS COMP IRNSS SBAS DGPS Corr No No No No No RTCM 2 Raw OBS data No No No No No Broadcast EPH No No No No No Raw OBS data No No No No 3.1 RTCM 3 Broadcast EPH No No No No No Precise EPH Draft Draft No No No No No Precise CLK Draft Draft No No No No No SBAS * DGPSCorr. C C No No No No C * RTCA/DO 229C Issue: Lack of standard data formats especially for newly coming GNSSs. 9
10 Time/Coordinate Systems GNSS Time System Coordinate System GPS GPS Time WGS84 GLONASS GLONASS Time PZ90.01 Galileo Galileo System Time GTRF QZSS QZSS Time JGS Compass?? IRNSS?? SBAS Own System Time Own Coordinate System Issue: How to get transformation parameters between different systems especially ill for time systems? 10
11 Satellite/Receiver Dependent Biases Inter code bias (DCB) in satellites TGD, P1 P2, P1 C1, P2 C2, C1 C5, Inter system bias in receivers Receivers may introduce biases even in the same code Inter channel bias for GLONASS Receiver dependent bias due to FDMA Half or quarter cycle phase shift Between phase observables based on different code Issue: How to handle such biases in processing the mixture of dt data from different GNSSs? 11
12 Multi GNSS Implementation in RTKLIB


13 RTKLIB Open Source Program Package for GNSS Positioning Wholesource codes arefreely available License: GPLv3 >10,000 downloads (Total) Portable Library + Several APs ANSI C + socket/pthread Portable command line APs GUI APs for Windows 13
14 Brief History 2006/4 v First version for RTK+C Programming lecture 2007/1 v Simple post processing AP for KGPS 2007/3 v Add windows GUI AP 2008/7 v Add APs, support medium range 2009/1 v Add real time AP, support NTRIP Distributed as Open Source S/W 2009/5 v Support RTCM, NRTK, several receivers 2009/9 v Fix bugs, provide English manual 2009/12 v Support GLONASS 2010/8 v Support PPP, RINEX 3 14
15 RTKLIB APs STRSVR RTKCONV NTRIPBROWS RTKNAVI RTKPOST RTKPLOT 15
16 Features of RTKLIB Standard and precise positioning algorithms with: GPS, GLONASS, SBAS (and Galileo, QZSS) Various positioning modes: Single, SBAS, DGPS, RTK, Static, Moving base and PPP Supports many formats/protocols and receivers: RINEX 2, RINEX 3, RTCM v2 v.2, RTCM v.3, v3 NTRIP , NMEA0183, SP3, RINEX CLK, ANTEX, NGS PCV, NovAtel, Hemisphere, u blox, SkyTraq, External communication via: Serial, TCP/IP, NTRIP and file streams 16
17 RTKLIB Released on August 8, 2010 New Features: PPP Kinematic or PPP Static mode for both of real time and post processing Long baseline RTK up to 1,000 km Supports RTCM v.3 MT (SSR) for real time orbit and clock corrections Supports RINEX 3.0 for multi GNSS processing Ready to support new GNSS (QZSS, Galileo,...) Real time and remote visualization by RTKPLOT 17
18 Supported RINEX File Types RINEX Version Observation Data (OBS) GPS GLO GAL QZSS COMP IRNSS SBAS MET 2.10,11,12 O O O O* O 3.00 O O O O* O RINEX Version Navigation Messages (NAV) GPS GLO GAL QZSS COMP IRNSS SBAS CLK 2.10,11,12 N G L* J* H 3.00 N N N N* N C** * extension, ** read only, not supported 18
19 Supported OBS Types for RINEX 3 Type: Signal (GNSS) Type: Signal (GNSS) L1C : L1C/A,E1C (GPS,GLO,GAL,QZS,SBS) L2Y : L2Y (GPS) L1P : L1P (GPS,GLO) L2M : L2M (GPS) L1W : L1 Z-track (GPS) L2N : L2codeless (GPS) L1Y : L1Y (GPS) L5I : L5/E5aI 5 (GPS,GAL,QZS,SBS) L1M : L1M (GPS) L5Q : L5/E5aQ (GPS,GAL,QZS,SBS) L1N : L1codeless (GPS) L5X : L5/E5aI+Q (GPS,GAL,QZS,SBS) L1S : L1C(D) (GPS,QZS) L7I : E5bI (GAL) L1L : L1C(P) (GPS,QZS) S) L1E : L1-SAIF (QZS) * L1A : E1A (GAL) L1B : E1B (GAL) L1X : E1B+C,L1C(D+P) (GAL,QZS) L1Z : E1A+B+C (GAL) L2C : L2C/A (GPS,GLO) L2D : L2 L1C/A-(P2-P1) (GPS) L2S : L2C(M) (GPS,QZS) L2L : L2C(L) (GPS,QZS) L2X : L2C(M+L) (GPS,QZS) L2P : L2P (GPS,GLO) L2W : L2 Z-track (GPS) L7Q : E5bQ (GAL) L7X : E5bI+Q (GAL) L6A : E6A (GAL) L6B : E6B (GAL) L6C : E6C (GAL) L6X : E6B+C (GAL) L6Z : E6A+B+C (GAL) L6S : LEX-S (QZS) * L6L : LEX-L L (QZS) * L8I : E5(a+b)I (GAL) L8Q : E5(a+b)Q (GAL) L8X : E5(a+b)I+Q (GAL) *: Extensions for QZSS 19
20 Multi GNSS Considerations in RTKLIB Time System Internally handle time based on GPST Estimate inter system time offset for single/ppp mode Need careful treatment for ephemeris computation Coordinate System No need for explicit transformation based on ITRF Satellite/Receiver Dependent Bias Incorporate of CODE DCB (P1 P2, P1 C1) for GPS Estimate inter channel bias for GLONASS RTK Need moreexperience experience for other GNSSs 20

21 Static PPP with IGS Final Repeatability after Geonet Linear Fitting (mm) Station E W N S U D GEONET2110: 2009/1/1 12/3112/31 E W N S U D 5cm STD E/N/U: mm 21
22 Real Time PPP with IGS Orbit/Clock NovAtel, 2010/10/1 10/14 1Hz with GSOC/DLR: CLK20 E W N S U D RMS E/N/U: 4.9, 5.6, 10.1 cm 50cm 22






23 Long Baseline RTK E W BL=471.2 km January 1 7, 2009 July 1 7, 2009 U D N S E W STD=0.7,0.9,2.3 cm FIX=99.8% BL=961.3 km STD=1.1,1.3,3.8 cm FIX=99.0% U D S N STD=1.6,1.3,3.0 cm FIX=98.8% STD=1.1,1.5,3.6 cm FIX=96.2%
24 Future Plan 24
25 Future Release v : End of 2010 Minor version up to fix problems and bugs v : Spring or Summer 2011 Restructure of internal data structure Add formal support for QZSS (and Galileo) Add single frequency PPP Improvement of PPP and Long baseline RTK Add several formats and receivers S/W receiver module 25



26 S/W Receiver for Multi GNSS Signals SDR Receiver Module for RTKLIB FFT based parallel correlator for acquisition S/W correlator for code/phase tracking Navigation data decoder L1C/A, L1C for GPS/Galileo/QZSS and L1 GLONASS 26
27 Summary 27
28 Summary Introduction of Multi GNSS Issues for Multi GNSS Data Processing Lack of standard format for newly coming GNSSs Time/coordinate systems Satellite/receiver dependent biases Multi GNSS Implementation in RTKLIB Features in latest version Supported formats Future release plan 28
GNSS analysis software GSILIB for utilizing Multi- GNSS data
 Technical Seminar Reference Frame in Practice, GNSS analysis software GSILIB for utilizing Multi- GNSS data *Satoshi Kawamoto, Naofumi Takamatsu Geospatial Information Authority of Japan Sponsors: Geospatial
Technical Seminar Reference Frame in Practice, GNSS analysis software GSILIB for utilizing Multi- GNSS data *Satoshi Kawamoto, Naofumi Takamatsu Geospatial Information Authority of Japan Sponsors: Geospatial
Effect of Quasi Zenith Satellite (QZS) on GPS Positioning
 on GPS Positioning") Effect of Quasi Zenith Satellite (QZS) on GPS ing Tomoji Takasu 1, Takuji Ebinuma 2, and Akio Yasuda 3 Laboratory of Satellite Navigation, Tokyo University of Marine Science and Technology 1 (Tel: +81-5245-7365,
Effect of Quasi Zenith Satellite (QZS) on GPS ing Tomoji Takasu 1, Takuji Ebinuma 2, and Akio Yasuda 3 Laboratory of Satellite Navigation, Tokyo University of Marine Science and Technology 1 (Tel: +81-5245-7365,
Quasi-Zenith Satellite System (QZSS)
") Transmission of Augmentation Corrections using the Japanese QZSS for Real-Time Precise Point Positioning in Australia Ken Harima 1, Suelynn Choy 1, Mazher Choudhury 2, Chris Rizos 2, Satoshi Kogure 3 1
Transmission of Augmentation Corrections using the Japanese QZSS for Real-Time Precise Point Positioning in Australia Ken Harima 1, Suelynn Choy 1, Mazher Choudhury 2, Chris Rizos 2, Satoshi Kogure 3 1
Skytraq Manual (Single frequency receiver) Procedure to logging skytraq data with RTKNAVI
 Procedure to logging skytraq data with RTKNAVI") Tokyo University of Marine Science and Technology Skytraq Manual (Single frequency receiver) Procedure to logging skytraq data with RTKNAVI TUMSAT 1 Skytraq Receiver http://www.skytraq.com.tw/products/products.html
Tokyo University of Marine Science and Technology Skytraq Manual (Single frequency receiver) Procedure to logging skytraq data with RTKNAVI TUMSAT 1 Skytraq Receiver http://www.skytraq.com.tw/products/products.html
Research Activities and Education in TUMSAT
 Research Activities and Education in TUMSAT 2011/09/07 @ ICG-6 Akio Yasuda Tokyo University of Marine Science & Technology 1 Content Tokyo University of Marine Science and Technology Etchujima Campus of
Research Activities and Education in TUMSAT 2011/09/07 @ ICG-6 Akio Yasuda Tokyo University of Marine Science & Technology 1 Content Tokyo University of Marine Science and Technology Etchujima Campus of
Kalman Filter Based Integer Ambiguity. Ionosphere and Troposphere Estimation
 ION GNSS 2010 Kalman Filter Based Integer Ambiguity Resolution Strategy t for Long Baseline RTK with Ionosphere and Troposphere Estimation Tokyo University of Marine Science and Technology Tomoji jitakasu
ION GNSS 2010 Kalman Filter Based Integer Ambiguity Resolution Strategy t for Long Baseline RTK with Ionosphere and Troposphere Estimation Tokyo University of Marine Science and Technology Tomoji jitakasu
QZSS and LEX Signal. Performance of Real-Time Precise Point Positioning Using MADOCA-LEX Augmentation Messages. Outline
 Performance of Real-Time Precise Point Positioning Using MADOCA-LEX Augmentation Messages Suelynn Choy 1, Ken Harima 1, Mohammad Choudhury 2, Yong Li 2, Yaka Wakabayashi 3, Thomas Grinter 4, Satoshi Kogure
Performance of Real-Time Precise Point Positioning Using MADOCA-LEX Augmentation Messages Suelynn Choy 1, Ken Harima 1, Mohammad Choudhury 2, Yong Li 2, Yaka Wakabayashi 3, Thomas Grinter 4, Satoshi Kogure
An Industry View on Realistic Benefits for High Precision GNSS Applications due to GNSS Modernisation The Future of High Precision GNSS
 An Industry View on Realistic Benefits for High Precision GNSS Applications due to GNSS Modernisation The Future of High Precision GNSS Bernhard Richter GNSS Business Director at Leica Geosystems 1 Content
An Industry View on Realistic Benefits for High Precision GNSS Applications due to GNSS Modernisation The Future of High Precision GNSS Bernhard Richter GNSS Business Director at Leica Geosystems 1 Content
Asia Oceania Regional Workshop on GNSS Precise Point Positioning Experiment by using QZSS LEX
 Asia Oceania Regional Workshop on GNSS 2010 Precise Point Positioning Experiment by using QZSS LEX Tomoji TAKASU Tokyo University of Marine Science and Technology Contents Introduction of QZSS LEX Evaluation
Asia Oceania Regional Workshop on GNSS 2010 Precise Point Positioning Experiment by using QZSS LEX Tomoji TAKASU Tokyo University of Marine Science and Technology Contents Introduction of QZSS LEX Evaluation
Real-time Stream Conversion to RTCM-3 MSM and RINEX-3 in IGS/MGEX Context
 Real-time Stream Conversion to RTCM-3 MSM and RINEX-3 in IGS/MGEX Context Georg Weber (BKG), Ken MacLeod (NRCan), Leos Mervart (CTU), Oliver Montenbruck (DLR), James Perlt (BKG), Dirk Stöcker (Alberding),
Real-time Stream Conversion to RTCM-3 MSM and RINEX-3 in IGS/MGEX Context Georg Weber (BKG), Ken MacLeod (NRCan), Leos Mervart (CTU), Oliver Montenbruck (DLR), James Perlt (BKG), Dirk Stöcker (Alberding),
GPS/GNSS シンポジウム 2013 講演会 高精度受信機技術と PPP 実用化現状 東京海洋大学高須知二 ~ 東京海洋大学越中島会館
 GPS/GNSS シンポジウム 2013 講演会 高精度受信機技術と PPP 実用化現状 東京海洋大学高須知二 2013-10-29 ~ 31 @ 東京海洋大学越中島会館 Contents RTKLIB v. 2.4.2 MADOCA References: [1] T. Takasu Multiple Constellation PPP with RTKLIB v.2.4.2, GNSS Precise
GPS/GNSS シンポジウム 2013 講演会 高精度受信機技術と PPP 実用化現状 東京海洋大学高須知二 2013-10-29 ~ 31 @ 東京海洋大学越中島会館 Contents RTKLIB v. 2.4.2 MADOCA References: [1] T. Takasu Multiple Constellation PPP with RTKLIB v.2.4.2, GNSS Precise
An introduction to RTKLIB open source GNSS processing software. Ryan Ruddick and Suelynn Choy
 An introduction to RTKLIB open source GNSS processing software Ryan Ruddick and Suelynn Choy 1 Resources RTKLIB homepage http://www.rtklib.com GIT repository https://github.com/tomojitakasu/rtklib/ Windows
An introduction to RTKLIB open source GNSS processing software Ryan Ruddick and Suelynn Choy 1 Resources RTKLIB homepage http://www.rtklib.com GIT repository https://github.com/tomojitakasu/rtklib/ Windows
Development of Multi-GNSS Orbit and Clock Determination Software "MADOCA"
 The 5th Asia Oceania Regional Workshop on GNSS Development of Multi-GNSS Orbit and Clock Determination Software "MADOCA" Tokyo Univ. of Marine Science and Technology Tomoji TAKASU December 1-3, 2013 @Hanoi
The 5th Asia Oceania Regional Workshop on GNSS Development of Multi-GNSS Orbit and Clock Determination Software "MADOCA" Tokyo Univ. of Marine Science and Technology Tomoji TAKASU December 1-3, 2013 @Hanoi
Approach to the era of Multi-GNSS (GEONET by GSI : part2)
") Approach to the era of Multi-GNSS (GEONET by GSI : part2) Tetsuro IMAKIIRE (Geospatial Information Authority of Japan) Contents 1. Multi GNSS environment 1.1 Expansion of GNSS 1.2 QZSS 2. Utility of Multi
Approach to the era of Multi-GNSS (GEONET by GSI : part2) Tetsuro IMAKIIRE (Geospatial Information Authority of Japan) Contents 1. Multi GNSS environment 1.1 Expansion of GNSS 1.2 QZSS 2. Utility of Multi
u-box 社 NEO-M8N 受信機による マルチ GNSS RTK 性能の評価
 The 19th GPS/GNSS Symposium 2014, October 28-30, 2014, Tokyo, Japan u-box 社 NEO-M8N 受信機による マルチ GNSS RTK 性能の評価 Evaluation of Multi-GNSS RTK performance with u-blox NEO-M8N receivers Tomoji TAKASU Tokyo
The 19th GPS/GNSS Symposium 2014, October 28-30, 2014, Tokyo, Japan u-box 社 NEO-M8N 受信機による マルチ GNSS RTK 性能の評価 Evaluation of Multi-GNSS RTK performance with u-blox NEO-M8N receivers Tomoji TAKASU Tokyo
Preparing for the Future The IGS in a Multi-GNSS World
 Preparing for the Future The IGS in a Multi-GNSS World O. Montenbruck DLR/GSOC 1 The International GNSS Service is a federation of more than 200 institutions and organizations worldwide a Service of the
Preparing for the Future The IGS in a Multi-GNSS World O. Montenbruck DLR/GSOC 1 The International GNSS Service is a federation of more than 200 institutions and organizations worldwide a Service of the
Real-Time and Multi-GNSS Key Projects of the International GNSS Service
 Real-Time and Multi-GNSS Key Projects of the International GNSS Service Urs Hugentobler, Chris Rizos, Mark Caissy, Georg Weber, Oliver Montenbruck, Ruth Neilan EUREF 2013 Symposium Budapest, Hungary, May
Real-Time and Multi-GNSS Key Projects of the International GNSS Service Urs Hugentobler, Chris Rizos, Mark Caissy, Georg Weber, Oliver Montenbruck, Ruth Neilan EUREF 2013 Symposium Budapest, Hungary, May
Prospect for Global Positioning Augmentation Service by QZSS
 Prospect for Global Positioning Augmentation Service by QZSS Global Positioning Augmentation Service Corporation Director, Yoshikatsu Iotake Feb. 6, 2018 Copyright 2018 Global Positioning Augmentation
Prospect for Global Positioning Augmentation Service by QZSS Global Positioning Augmentation Service Corporation Director, Yoshikatsu Iotake Feb. 6, 2018 Copyright 2018 Global Positioning Augmentation
Multi-GNSS Environment. Chris Rizos UNSW, Australia President IAG
 Multi-GNSS Environment Chris Rizos UNSW, Australia President IAG Visit official GNSS web sites: GPS - www.navcen.uscg.gov & www.gps.gov GLONASS - glonass-ianc.rsa.ru/en/ Galileo - www.esa.int/our_activities/navigation
Multi-GNSS Environment Chris Rizos UNSW, Australia President IAG Visit official GNSS web sites: GPS - www.navcen.uscg.gov & www.gps.gov GLONASS - glonass-ianc.rsa.ru/en/ Galileo - www.esa.int/our_activities/navigation
Report on a Multi-GNSS Demonstration project in the Asia/Oceania region
 Report on a Multi-GNSS Demonstration project in the Asia/Oceania region - Asia Oceania is the Showcase of New GNSS Era - Japan Aerospace Exploration Agency ICG 5@Turin, Italy October 19, 2010 1 Back Ground
Report on a Multi-GNSS Demonstration project in the Asia/Oceania region - Asia Oceania is the Showcase of New GNSS Era - Japan Aerospace Exploration Agency ICG 5@Turin, Italy October 19, 2010 1 Back Ground
King AbdulAziz University. Faculty of Environmental Design. Geomatics Department. Mobile GIS GEOM 427. Lecture 3
 King AbdulAziz University Faculty of Environmental Design Geomatics Department Mobile GIS GEOM 427 Lecture 3 Ahmed Baik, Ph.D. Email: abaik@kau.edu.sa Eng. Fisal Basheeh Email: fbasaheeh@kau.edu.sa GNSS
King AbdulAziz University Faculty of Environmental Design Geomatics Department Mobile GIS GEOM 427 Lecture 3 Ahmed Baik, Ph.D. Email: abaik@kau.edu.sa Eng. Fisal Basheeh Email: fbasaheeh@kau.edu.sa GNSS
Where Next for GNSS?
 Where Next for GNSS? Professor Terry Moore Professor of Satellite Navigation Nottingham The University of Nottingham Where Next for GNSS Back to the Future? Professor Terry Moore Professor of Satellite
Where Next for GNSS? Professor Terry Moore Professor of Satellite Navigation Nottingham The University of Nottingham Where Next for GNSS Back to the Future? Professor Terry Moore Professor of Satellite
The technical contribution of QZSS and GNSS to Tsunami early warning system
 0/17 Tsunami Workshop by Sentinel Asia @Sendai International Center Meeting Room 5 The technical contribution of QZSS and GNSS to Tsunami early warning system July 3, 2012 K. Mutoh, J. Yamashita, and S.
0/17 Tsunami Workshop by Sentinel Asia @Sendai International Center Meeting Room 5 The technical contribution of QZSS and GNSS to Tsunami early warning system July 3, 2012 K. Mutoh, J. Yamashita, and S.
Assessment of GNSS Ionospheric Scintillation and TEC Monitoring Using the Multi-constellation GPStation-6 Receiver
 Assessment of GNSS Ionospheric Scintillation and TEC Monitoring Using the Multi-constellation GPStation-6 Receiver Rod MacLeod Regional Manager Asia/Pacific NovAtel Australia Pty Ltd Outline Ionospheric
Assessment of GNSS Ionospheric Scintillation and TEC Monitoring Using the Multi-constellation GPStation-6 Receiver Rod MacLeod Regional Manager Asia/Pacific NovAtel Australia Pty Ltd Outline Ionospheric
MGA Webinar Series : 1 Very Cheap RTK Receivers: Changing the Landscape of Positioning Services
 MGA Webinar Series : 1 Very Cheap RTK Receivers: Changing the Landscape of Positioning Services Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp
MGA Webinar Series : 1 Very Cheap RTK Receivers: Changing the Landscape of Positioning Services Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp
GFZ Analysis Centre: Multi-GNSS Processing and Products
 GFZ Analysis Centre: Multi-GNSS Processing and Products Mathias Fritsche, Zhiguo Deng, Maik Uhlemann,Thomas Nischan, Markus Bradke, Markus Ramatschi, Andre Brand, Gerda Beeskow DeutschesGeoforschungsZentrum
GFZ Analysis Centre: Multi-GNSS Processing and Products Mathias Fritsche, Zhiguo Deng, Maik Uhlemann,Thomas Nischan, Markus Bradke, Markus Ramatschi, Andre Brand, Gerda Beeskow DeutschesGeoforschungsZentrum
GNSS Low-Cost High-Accuracy Receiver (L-CHAR)
") GNSS Low-Cost High-Accuracy Receiver (L-CHAR) Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 High Accuracy Receivers
GNSS Low-Cost High-Accuracy Receiver (L-CHAR) Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 High Accuracy Receivers
Multi-Constellation GNSS Precise Point Positioning using GPS, GLONASS and BeiDou in Australia
 International Global Navigation Satellite Systems Society IGNSS Symposium 2015 Multi-Constellation GNSS Precise Point Positioning using GPS, GLONASS and BeiDou in Australia Xiaodong Ren 1,Suelynn Choy
International Global Navigation Satellite Systems Society IGNSS Symposium 2015 Multi-Constellation GNSS Precise Point Positioning using GPS, GLONASS and BeiDou in Australia Xiaodong Ren 1,Suelynn Choy
Introduction to Global Navigation Satellite System (GNSS) Signal Structure
 Signal Structure") Introduction to Global Navigation Satellite System (GNSS) Signal Structure Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp
Introduction to Global Navigation Satellite System (GNSS) Signal Structure Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp
Status of Multi-GNSS Monitoring Network Establishment
 Status of Multi-GNSS Monitoring Network Establishment Japan Aerospace Exploration Agency Satoshi Kogure ICG-6 6 WG-A/D cross-session session @Tokyo, JAPAN 7 September, 2011 Contents Introduction Overview
Status of Multi-GNSS Monitoring Network Establishment Japan Aerospace Exploration Agency Satoshi Kogure ICG-6 6 WG-A/D cross-session session @Tokyo, JAPAN 7 September, 2011 Contents Introduction Overview
Introduction to Global Navigation Satellite System (GNSS) Module: 1
 Module: 1") Introduction to Global Navigation Satellite System (GNSS) Module: 1 Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide :
Introduction to Global Navigation Satellite System (GNSS) Module: 1 Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide :
Positioning Techniques. João F. Galera Monico - UNESP Tuesday 12 Sep
 Positioning Techniques João F. Galera Monico - UNESP Tuesday 12 Sep Positioning methods Absolute Positioning Static and kinematic SPP and PPP Relative Positioning Static Static rapid Semi kinematic Kinematic
Positioning Techniques João F. Galera Monico - UNESP Tuesday 12 Sep Positioning methods Absolute Positioning Static and kinematic SPP and PPP Relative Positioning Static Static rapid Semi kinematic Kinematic
Compact multi-gnss PPP corrections messages for transmission through a 250 bps channel
 Compact multi-gnss PPP corrections messages for transmission through a 250 bps channel Ken Harima, School of Science, RMIT University Suelynn Choy, School of Science, RMIT University Chris Rizos, School
Compact multi-gnss PPP corrections messages for transmission through a 250 bps channel Ken Harima, School of Science, RMIT University Suelynn Choy, School of Science, RMIT University Chris Rizos, School
Future GNSS Precision Applications. Stuart Riley
 Future GNSS Precision Applications Stuart Riley Major Trimble Precision Markets Survey Mostly person portable equipment Construction Machine control and person carried equipment Includes Marine applications
Future GNSS Precision Applications Stuart Riley Major Trimble Precision Markets Survey Mostly person portable equipment Construction Machine control and person carried equipment Includes Marine applications
COMPARISON BETWEEN BROADCAST AND PRECISE ORBITS: GPS GLONASS GALILEO AND BEIDOU. A. Caporali and L. Nicolini University of Padova, Italy
 COMPARISON BETWEEN BROADCAST AND PRECISE ORBITS: GPS GLONASS GALILEO AND BEIDOU A. Caporali and L. Nicolini University of Padova, Italy Summary Previous works Input data and method used Comparison between
COMPARISON BETWEEN BROADCAST AND PRECISE ORBITS: GPS GLONASS GALILEO AND BEIDOU A. Caporali and L. Nicolini University of Padova, Italy Summary Previous works Input data and method used Comparison between
PPP with Ambiguity Resolution (AR) using RTCM-SSR
 using RTCM-SSR") PPP with Ambiguity Resolution (AR) using RTCM-SSR Gerhard Wübbena, Martin Schmitz, Andreas Bagge Geo++ GmbH 30827 Garbsen Germany www.geopp.de PPP with Ambiguity Resolution (AR) using RTCM-SSR Abstract
PPP with Ambiguity Resolution (AR) using RTCM-SSR Gerhard Wübbena, Martin Schmitz, Andreas Bagge Geo++ GmbH 30827 Garbsen Germany www.geopp.de PPP with Ambiguity Resolution (AR) using RTCM-SSR Abstract
Capacity Building Activities on GNSS in Japan
 Capacity Building Activities on GNSS in Japan Hiroaki Tateshita Japan Aerospace Exploration Agency Akio Yasuda Tokyo University of Marine Science & Technology 1 Contents Back ground of Geospatial Information
Capacity Building Activities on GNSS in Japan Hiroaki Tateshita Japan Aerospace Exploration Agency Akio Yasuda Tokyo University of Marine Science & Technology 1 Contents Back ground of Geospatial Information
High Precision Navigation Capabilities(L1-SAIF) and Applications Using Japanese Quasi-Zenith Satellite System (QZSS)
 and Applications Using Japanese Quasi-Zenith Satellite System (QZSS)") High Precision Navigation Capabilities(L1-SAIF) and Applications Using Japanese Quasi-Zenith Satellite System (QZSS) ICG WG-B Application SG Meeting Munich, Germany March 12, 2012 Satellite Positioning
High Precision Navigation Capabilities(L1-SAIF) and Applications Using Japanese Quasi-Zenith Satellite System (QZSS) ICG WG-B Application SG Meeting Munich, Germany March 12, 2012 Satellite Positioning
SSR Technology for Scalable Real-Time GNSS Applications
 SSR Technology for Scalable Real-Time GNSS Applications Gerhard Wübbena, Jannes Wübbena, Temmo Wübbena, Martin Schmitz Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Abstract SSR Technology for scalable
SSR Technology for Scalable Real-Time GNSS Applications Gerhard Wübbena, Jannes Wübbena, Temmo Wübbena, Martin Schmitz Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Abstract SSR Technology for scalable
GNSS Accuracy Improvements through Multipath Mitigation with New Signals and services
 GNSS Accuracy Improvements through Multipath Mitigation with New Signals and services Andrey Veytsel, Ph.D Moscow Technical University 10 Meeting of the International Committee on Global Navigation Satellite
GNSS Accuracy Improvements through Multipath Mitigation with New Signals and services Andrey Veytsel, Ph.D Moscow Technical University 10 Meeting of the International Committee on Global Navigation Satellite
Leica GRX1200+ Series High Performance GNSS Reference Receivers
 Leica GRX1200+ Series High Performance GNSS Reference Receivers Leica GRX1200+ Series For permanent reference stations The Leica GRX1200+ Series, part of Leica's future proof System 1200, is designed specifically
Leica GRX1200+ Series High Performance GNSS Reference Receivers Leica GRX1200+ Series For permanent reference stations The Leica GRX1200+ Series, part of Leica's future proof System 1200, is designed specifically
INTEROPERABILITY OF THE GNSS'S FOR POSITIONING AND TIMING. A. Caporali, L. Nicolini University of Padova, Italy
 INTEROPERABILITY OF THE GNSS'S FOR POSITIONING AND TIMING A. Caporali, L. Nicolini University of Padova, Italy Outlook Monitor 31 European GNSS sites with 5 different receivers (Javad, Leica, Septentrio,
INTEROPERABILITY OF THE GNSS'S FOR POSITIONING AND TIMING A. Caporali, L. Nicolini University of Padova, Italy Outlook Monitor 31 European GNSS sites with 5 different receivers (Javad, Leica, Septentrio,
Facility. Development and Testing. What s Next? GNSS Modernization and Next Generation Hardware for the UNAVCO Community
 Facility Development and Testing What s Next? GNSS Modernization and Next Generation Hardware for the UNAVCO Community Frederick Blume UNAVCO Science Workshop, 9 March, 2010 Motivation Last formal hardware
Facility Development and Testing What s Next? GNSS Modernization and Next Generation Hardware for the UNAVCO Community Frederick Blume UNAVCO Science Workshop, 9 March, 2010 Motivation Last formal hardware
Multi-GNSS real-time troposphere delay estimation
 Multi-GNSS real-time troposphere delay estimation Jaroslaw Bosy, Tomasz Hadas, Jak Kaplon, Kamil Kazmierski The 7th China Satellite Navigation Conference, May 18-20 Changsha China, Session S1: BDS/GNSS
Multi-GNSS real-time troposphere delay estimation Jaroslaw Bosy, Tomasz Hadas, Jak Kaplon, Kamil Kazmierski The 7th China Satellite Navigation Conference, May 18-20 Changsha China, Session S1: BDS/GNSS
EXPERIMENTAL RESULTS OF LEX CORRECTIONS USING FARMING MACHINE
 Sixth Meeting of the International Committee on Global Navigation Satellite Systems (ICG) EXPERIMENTAL RESULTS OF LEX CORRECTIONS USING FARMING MACHINE Masayuki Kanzaki Hitachi Zosen Corporation Prof.
Sixth Meeting of the International Committee on Global Navigation Satellite Systems (ICG) EXPERIMENTAL RESULTS OF LEX CORRECTIONS USING FARMING MACHINE Masayuki Kanzaki Hitachi Zosen Corporation Prof.
RINEX. The Receiver Independent Exchange Format. Version 3.04
 RINEX The Receiver Independent Exchange Format Version 3.04 International GNSS Service (IGS), RINEX Working Group and Radio Technical Commission for Maritime Services Special Committee 104 (RTCM-SC104)
RINEX The Receiver Independent Exchange Format Version 3.04 International GNSS Service (IGS), RINEX Working Group and Radio Technical Commission for Maritime Services Special Committee 104 (RTCM-SC104)
MAGICGNSS RTCM-BASED SERVICE, A LEAP FORWARD TOWARDS MULTI- GNSS HIGH ACCURACY REAL-TIME PROCESSING
 ION GNSS 2015 MAGICGNSS RTCM-BASED SERVICE, A LEAP FORWARD TOWARDS MULTI- GNSS HIGH ACCURACY REAL-TIME PROCESSING SEPTEMBER 16 TH, 2015 - ION GNSS 2015, TAMPA, FLORIDA, USA SESSION E2A: NEXT GENERATION
ION GNSS 2015 MAGICGNSS RTCM-BASED SERVICE, A LEAP FORWARD TOWARDS MULTI- GNSS HIGH ACCURACY REAL-TIME PROCESSING SEPTEMBER 16 TH, 2015 - ION GNSS 2015, TAMPA, FLORIDA, USA SESSION E2A: NEXT GENERATION
The International Scene: How Precise Positioning Will Underpin Critical GNSS Applications
 The International Scene: How Precise Positioning Will Underpin Critical GNSS Applications School of Civil & Environmental Engineering, UNSW, Sydney, Australia Chris Rizos Member of the IGS Governing Board
The International Scene: How Precise Positioning Will Underpin Critical GNSS Applications School of Civil & Environmental Engineering, UNSW, Sydney, Australia Chris Rizos Member of the IGS Governing Board
Article Number: 457 Rating: Unrated Last Updated: Wed, Sep 2, 2009 at 3:46 PM
 T opcon GB-1000 - Receiver Board Firmware Version 3.4 Article Number: 457 Rating: Unrated Last Updated: Wed, Sep 2, 2009 at 3:46 PM Topcon has recently released GNSS receiver board firmware version 3.4
T opcon GB-1000 - Receiver Board Firmware Version 3.4 Article Number: 457 Rating: Unrated Last Updated: Wed, Sep 2, 2009 at 3:46 PM Topcon has recently released GNSS receiver board firmware version 3.4
Current status of Quasi-Zenith Satellite System. Japan Aerospace Exploration Agency QZSS Project Team
 Current status of Quasi-Zenith Satellite System Japan Aerospace Exploration Agency QZSS Project Team 1 Quasi-Zenith Satellite System The QZSS is a regional space-based PNT (Positioning, Navigation and
Current status of Quasi-Zenith Satellite System Japan Aerospace Exploration Agency QZSS Project Team 1 Quasi-Zenith Satellite System The QZSS is a regional space-based PNT (Positioning, Navigation and
Performance of Real-Time Precise Point Positioning Using MADOCA-LEX Augmentation Messages
 Performance of Real-Time Precise Point Positioning Using MADOCA-LEX Augmentation Messages Ken HARIMA, Suelynn CHOY, Yong LI, Thomas GRINTER, Mohammad CHOUDHURY and Chris RIZOS, Australia Yaka WAKABAYASHI
Performance of Real-Time Precise Point Positioning Using MADOCA-LEX Augmentation Messages Ken HARIMA, Suelynn CHOY, Yong LI, Thomas GRINTER, Mohammad CHOUDHURY and Chris RIZOS, Australia Yaka WAKABAYASHI
Global Navigation Satellite System (GNSS) for Disaster Mitigation
 for Disaster Mitigation") Global Navigation Satellite System (GNSS) for Disaster Mitigation By Chathura H. Wickramasinghe Geoinformatics Center Asian Institute of Technology Establish in 1959 as a Post Graduate School Catering
Global Navigation Satellite System (GNSS) for Disaster Mitigation By Chathura H. Wickramasinghe Geoinformatics Center Asian Institute of Technology Establish in 1959 as a Post Graduate School Catering
Introduction to GNSS Base-Station
 Introduction to GNSS Base-Station Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 Introduction GPS or GNSS observation
Introduction to GNSS Base-Station Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 Introduction GPS or GNSS observation
Leica GRX1200 Series High Performance GNSS Reference Receivers
 Leica GRX1200 Series High Performance GNSS Reference Receivers Leica GRX1200 Series For permanent reference stations The Leica GRX1200 Series, part of Leica s new System 1200, is designed specifically
Leica GRX1200 Series High Performance GNSS Reference Receivers Leica GRX1200 Series For permanent reference stations The Leica GRX1200 Series, part of Leica s new System 1200, is designed specifically
SSR & RTCM Current Status
 SSR & RTCM Current Status Gerhard Wübbena, Martin Schmitz, Jannes Wübbena Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Outline RTCM SC104 WG s SSR Today SSR Formats SC104 RTCM-SSR Geo++ RTCM 4090 SSR
SSR & RTCM Current Status Gerhard Wübbena, Martin Schmitz, Jannes Wübbena Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Outline RTCM SC104 WG s SSR Today SSR Formats SC104 RTCM-SSR Geo++ RTCM 4090 SSR
Field experience with future GNSS ranging signals (a review). A.Simsky, J.-M. Sleewaegen, W. De Wilde Septentrio, Belgium
. A.Simsky, J.-M. Sleewaegen, W. De Wilde Septentrio, Belgium") Field experience with future GNSS ranging signals (a review). A.Simsky, J.-M. Sleewaegen, W. De Wilde Septentrio, Belgium Technical University of Munich June 07 2010 Contents Septentrio: company profile
Field experience with future GNSS ranging signals (a review). A.Simsky, J.-M. Sleewaegen, W. De Wilde Septentrio, Belgium Technical University of Munich June 07 2010 Contents Septentrio: company profile
Performance Evaluation of Differential Global Navigation Satellite System with RTK Corrections
 IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p- ISSN: 2278-8735.Volume 9, Issue 2, Ver. VI (Mar - Apr. 2014), PP 43-47 Performance Evaluation of Differential
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p- ISSN: 2278-8735.Volume 9, Issue 2, Ver. VI (Mar - Apr. 2014), PP 43-47 Performance Evaluation of Differential
Fast convergence of Trimble CenterPoint RTX by regional augmentation
 Fast convergence of Trimble CenterPoint RTX by regional augmentation Dr. Ralf Drescher Trimble Terrasat GmbH, Munich EGU General Assembly 2015, Vienna Thursday, 16 April 2015 Outline Introduction CenterPoint
Fast convergence of Trimble CenterPoint RTX by regional augmentation Dr. Ralf Drescher Trimble Terrasat GmbH, Munich EGU General Assembly 2015, Vienna Thursday, 16 April 2015 Outline Introduction CenterPoint
Multi-GNSS / Multi-Signal code bias determination from raw GNSS observations
 Multi-GNSS / Multi-Signal code bias determination from raw GNSS observations F. Reckeweg, E. Schönemann, T. Springer, M. Becker, W. Enderle Geodätische Woche 2016 InterGEO 11.-13. October 2016 Hamburg,
Multi-GNSS / Multi-Signal code bias determination from raw GNSS observations F. Reckeweg, E. Schönemann, T. Springer, M. Becker, W. Enderle Geodätische Woche 2016 InterGEO 11.-13. October 2016 Hamburg,
1. INTRODUCTION. Longitude, deg In contrast to the global systems such as GPS, GLONASS and
 SPECIAL REPORT Highly-Accurate Positioning Experiment Using QZSS at ENRI Ken Ito Electronic Navigation Research Institute (ENRI) 1. INTRODUCTION P ositioning with GPS is widely used in Japan in the area
SPECIAL REPORT Highly-Accurate Positioning Experiment Using QZSS at ENRI Ken Ito Electronic Navigation Research Institute (ENRI) 1. INTRODUCTION P ositioning with GPS is widely used in Japan in the area
SLX-1 Multi-Application GNSS Receiver
 SLX-1 Multi-Application GNSS Receiver w w w.sa tla b g p s. c o m SLX-1 Multi-Application GNSS Receiver Designed for CORS Ready for Anything European Standards GPS GLONASS BEIDOU GALILEO SBAS QZSS Long
SLX-1 Multi-Application GNSS Receiver w w w.sa tla b g p s. c o m SLX-1 Multi-Application GNSS Receiver Designed for CORS Ready for Anything European Standards GPS GLONASS BEIDOU GALILEO SBAS QZSS Long
RTCM-SSR Strategy of Bias Treatment
 RTCM-SSR Strategy of Bias Treatment Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de Chair of RTCM-SSR WG www.rtcm.org RTCM-SC104 SSR Development working group established in 2007 3 message
RTCM-SSR Strategy of Bias Treatment Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de Chair of RTCM-SSR WG www.rtcm.org RTCM-SC104 SSR Development working group established in 2007 3 message
Japanese space-based PNT system, QZSS -Service, System, Applications-
 Japanese space-based PNT system, QZSS -Service, System, Applications- IGNSS2018 February 7, 2018 Satoshi Kogure QZSS Strategy Office, National Space Policy Secretariat Cabinet Office, Government of Japan
Japanese space-based PNT system, QZSS -Service, System, Applications- IGNSS2018 February 7, 2018 Satoshi Kogure QZSS Strategy Office, National Space Policy Secretariat Cabinet Office, Government of Japan
IMO WORLDWIDE RADIONAVIGATION SYSTEM (WWRNS) Study on Communication Techniques for High Accuracy DGPS in the Republic of Korea
 Study on Communication Techniques for High Accuracy DGPS in the Republic of Korea") INTERNATIONAL MARITIME ORGANIZATION E IMO SUB-COMMITTEE ON SAFETY OF NAVIGATION 52nd session Agenda item 12 NAV 52/INF.8 12 May 2006 ENGLISH ONLY WORLDWIDE RADIONAVIGATION SYSTEM (WWRNS) Study on Communication
INTERNATIONAL MARITIME ORGANIZATION E IMO SUB-COMMITTEE ON SAFETY OF NAVIGATION 52nd session Agenda item 12 NAV 52/INF.8 12 May 2006 ENGLISH ONLY WORLDWIDE RADIONAVIGATION SYSTEM (WWRNS) Study on Communication
Indian Institute of Technology Kanpur Department of Civil Engineering
 Indian Institute of Technology Kanpur Department of Civil Engineering Inquiry No- CE/JNM/2013-14/R-10 30 December, 2013 Subject: Quotation for supply of Integrated System/Smart System Reflectorless Robotic
Indian Institute of Technology Kanpur Department of Civil Engineering Inquiry No- CE/JNM/2013-14/R-10 30 December, 2013 Subject: Quotation for supply of Integrated System/Smart System Reflectorless Robotic
RELEASE NOTES. Trimble Infrastructure GNSS Series Receivers. Introduction. New features or changes. Updating the firmware
 RELEASE NOTES Trimble Infrastructure GNSS Series Receivers Introduction New features or changes Updating the firmware Version 4.42 Revision A June 2011 F Corporate office Trimble Navigation Limited Engineering
RELEASE NOTES Trimble Infrastructure GNSS Series Receivers Introduction New features or changes Updating the firmware Version 4.42 Revision A June 2011 F Corporate office Trimble Navigation Limited Engineering
GPS-Aided INS Datasheet Rev. 2.7
 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
GPS-Aided INS Datasheet Rev. 3.0
 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
MGEX Clock Determination at CODE
 source: http://boris.unibe.ch/74079/ downloaded: 13.3.2017 MGEX Clock Determination at CODE E. Orliac, L. Prange, R. Dach, S. Schaer and A. Jäggi Astronomical Institute of University of Bern (AIUB) Bern,
source: http://boris.unibe.ch/74079/ downloaded: 13.3.2017 MGEX Clock Determination at CODE E. Orliac, L. Prange, R. Dach, S. Schaer and A. Jäggi Astronomical Institute of University of Bern (AIUB) Bern,
CODE. L. Prange, R. Dach, S. Schaer, S. Lutz, A. Jäggi
 source: https://doi.org/10.7892/boris.44252 downloaded: 13.3.2017 Experiences with IGS MGEX data analysis at CODE. L. Prange, R. Dach, S. Schaer, S. Lutz, A. Jäggi Astronomical Institute, University of
source: https://doi.org/10.7892/boris.44252 downloaded: 13.3.2017 Experiences with IGS MGEX data analysis at CODE. L. Prange, R. Dach, S. Schaer, S. Lutz, A. Jäggi Astronomical Institute, University of
A Novel Device for Autonomous Real-Time Precise Positioning with Global Coverage
 A Novel Device for Autonomous Real-Time Precise Positioning with Global Coverage D. Calle, P. Navarro, A. Mozo, R. Píriz, D. Rodríguez, G. Tobías. GMV, Spain BIOGRAPHY David Calle has a Master of Science
A Novel Device for Autonomous Real-Time Precise Positioning with Global Coverage D. Calle, P. Navarro, A. Mozo, R. Píriz, D. Rodríguez, G. Tobías. GMV, Spain BIOGRAPHY David Calle has a Master of Science
RELEASE NOTES. Introduction. Trimble Infrastructure GNSS Series Receivers
 RELEASE NOTES Trimble Infrastructure GNSS Series Receivers These release notes describe the latest improvements made to the Trimble NetR9 GNSS Infrastructure series receivers. Introduction New Features
RELEASE NOTES Trimble Infrastructure GNSS Series Receivers These release notes describe the latest improvements made to the Trimble NetR9 GNSS Infrastructure series receivers. Introduction New Features
Progress of igmas and
 2017 ICG-12 Progress of igmas and IGMA Joint Trial Project igmas TEAM Kyoto Japan 2th Dec. 2017 Contents 1. Introduction 2. Progress of IGMA Joint Trial Project 3. Reference for Monitoring and Assessment
2017 ICG-12 Progress of igmas and IGMA Joint Trial Project igmas TEAM Kyoto Japan 2th Dec. 2017 Contents 1. Introduction 2. Progress of IGMA Joint Trial Project 3. Reference for Monitoring and Assessment
WHU s developments for the MGEX precise products and the GNSS ultra-rapid products
 IGS Workshop 2016 WHU s developments for the MGEX precise products and the GNSS ultra-rapid products Chuang Shi; Qile Zhao; Min Li; Jing Guo; Jingnan Liu Presented by Jianghui Geng GNSS Research Center,
IGS Workshop 2016 WHU s developments for the MGEX precise products and the GNSS ultra-rapid products Chuang Shi; Qile Zhao; Min Li; Jing Guo; Jingnan Liu Presented by Jianghui Geng GNSS Research Center,
GAMIT/GLOBK for GNSS. Material from R. W. King, T. A. Herring, M. A. Floyd (MIT) and S. C. McClusky (now at ANU)
 and S. C. McClusky (now at ANU)") GAMIT/GLOBK for GNSS M. A. Floyd Massachusetts Institute of Technology, Cambridge, MA, USA GPS Data Processing and Analysis with GAMIT/GLOBK and track GNS Science, Lower Hutt, New Zealand 26 February 2
GAMIT/GLOBK for GNSS M. A. Floyd Massachusetts Institute of Technology, Cambridge, MA, USA GPS Data Processing and Analysis with GAMIT/GLOBK and track GNS Science, Lower Hutt, New Zealand 26 February 2
Analysis of GNSS Receiver Biases and Noise using Zero Baseline Techniques
 1 Analysis of GNSS Receiver Biases and Noise using Zero Baseline Techniques Ken MacLeod, Simon Banville, Reza Ghoddousi-Fard and Paul Collins Canadian Geodetic Survey, Natural Resources Canada Plenary
1 Analysis of GNSS Receiver Biases and Noise using Zero Baseline Techniques Ken MacLeod, Simon Banville, Reza Ghoddousi-Fard and Paul Collins Canadian Geodetic Survey, Natural Resources Canada Plenary
5 Satellite Positioning
 5 Satellite Positioning 5-1 Development Status of the World s GNSSs and the Trend of the Satellite Positioning Utilization In 2010, some Global Navigation Satellite Systems (GNSSs) has been constructing
5 Satellite Positioning 5-1 Development Status of the World s GNSSs and the Trend of the Satellite Positioning Utilization In 2010, some Global Navigation Satellite Systems (GNSSs) has been constructing
Multisystem Real Time Precise-Point-Positioning, today with GPS+GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS
 2 International Symposium on /GNSS October 26-28, 2. Multisystem Real Time Precise-Point-Positioning, today with +GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS Álvaro Mozo García,
2 International Symposium on /GNSS October 26-28, 2. Multisystem Real Time Precise-Point-Positioning, today with +GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS Álvaro Mozo García,
The Current Status of QZSS Program
 The Current Status of QZSS Program Satoshi Kogure Japan Aerospace Exploration Agency (JAXA) October 21, 2015 International Association of Institute of Navigation World Cogress 2015 @Prague, Czech Republic
The Current Status of QZSS Program Satoshi Kogure Japan Aerospace Exploration Agency (JAXA) October 21, 2015 International Association of Institute of Navigation World Cogress 2015 @Prague, Czech Republic
GNSS High Precision Systems for Cadastre: development, experiences and Galileo perspectives
 GNSS High Precision Systems for Cadastre: development, experiences and Galileo perspectives CLGE Plenary Workshop 29 September 2017 Roberto Capua, Flavio Ferrante DO-11-DO-03 1 Agenda GNSS High Precision
GNSS High Precision Systems for Cadastre: development, experiences and Galileo perspectives CLGE Plenary Workshop 29 September 2017 Roberto Capua, Flavio Ferrante DO-11-DO-03 1 Agenda GNSS High Precision
GPS for. Land Surveyors. Jan Van Sickle. Fourth Edition. CRC Press. Taylor & Francis Group. Taylor & Francis Croup, an Informa business
 GPS for Land Surveyors Fourth Edition Jan Van Sickle CRC Press Taylor & Francis Group Boca Raton London New York CRC Press is an imprint of the Taylor & Francis Croup, an Informa business Contents Preface
GPS for Land Surveyors Fourth Edition Jan Van Sickle CRC Press Taylor & Francis Group Boca Raton London New York CRC Press is an imprint of the Taylor & Francis Croup, an Informa business Contents Preface
International GNSS Monitoring & Assessment Service for OS (igmas) ICG September 2011, Tokyo, Japan
 ICG September 2011, Tokyo, Japan") Presentation on igmas FOR WORKING GROUP A International GNSS Monitoring & Assessment Service for OS (igmas) by Xurong Dong International Cooperation Research Centre, CSNO ICG 6 5 9 September 2011, Tokyo,
Presentation on igmas FOR WORKING GROUP A International GNSS Monitoring & Assessment Service for OS (igmas) by Xurong Dong International Cooperation Research Centre, CSNO ICG 6 5 9 September 2011, Tokyo,
The last 25 years - GPS to multi-gnss: from a military tool to the most widely used civilian positioning solution
 1 The last 25 years - GPS to multi-gnss: from a military tool to the most widely used civilian positioning solution B. Hofmann-Wellenhof Institute of Geodesy / Navigation, Graz University of Technology
1 The last 25 years - GPS to multi-gnss: from a military tool to the most widely used civilian positioning solution B. Hofmann-Wellenhof Institute of Geodesy / Navigation, Graz University of Technology
Establishment of Regional Navigation Satellite System Utilizing Quasi-Zenith Satellite System
 Establishment of Regional Navigation Satellite System Utilizing Quasi-Zenith Satellite System Authors: Masayuki Saito*, Junichi Takiguchi* and Takeshi Okamoto* 1. Introduction The Global Navigation Satellite
Establishment of Regional Navigation Satellite System Utilizing Quasi-Zenith Satellite System Authors: Masayuki Saito*, Junichi Takiguchi* and Takeshi Okamoto* 1. Introduction The Global Navigation Satellite
Assessment of the Contribution of QZSS Combined GPS/BeiDou Positioning in Asia-Pacific Areas
 Assessment of the Contribution of QZSS Combined GPS/BeiDou Positioning in Asia-Pacific Areas Yize Zhang, Nobuaki Kubo, Junping Chen, Hu Wang and Jiexian Wang Abstract Three QZSS satellites are launched
Assessment of the Contribution of QZSS Combined GPS/BeiDou Positioning in Asia-Pacific Areas Yize Zhang, Nobuaki Kubo, Junping Chen, Hu Wang and Jiexian Wang Abstract Three QZSS satellites are launched
Performance Evaluation of the Effect of QZS (Quasi-zenith Satellite) on Precise Positioning
 on Precise Positioning") Performance Evaluation of the Effect of QZS (Quasi-zenith Satellite) on Precise Positioning Nobuaki Kubo, Tomoko Shirai, Tomoji Takasu, Akio Yasuda (TUMST) Satoshi Kogure (JAXA) Abstract The quasi-zenith
Performance Evaluation of the Effect of QZS (Quasi-zenith Satellite) on Precise Positioning Nobuaki Kubo, Tomoko Shirai, Tomoji Takasu, Akio Yasuda (TUMST) Satoshi Kogure (JAXA) Abstract The quasi-zenith
ION ITM Tokyo University of Marine Science and Technology H. Sridhara, N. Kubo, R.Kikuchi
 Single-Frequency Multi-GNSS RTK Positioning for Moving Platform ION ITM 215 215.1.27-29 Tokyo University of Marine Science and Technology H. Sridhara, N. Kubo, R.Kikuchi 1 Agenda Motivation and Background
Single-Frequency Multi-GNSS RTK Positioning for Moving Platform ION ITM 215 215.1.27-29 Tokyo University of Marine Science and Technology H. Sridhara, N. Kubo, R.Kikuchi 1 Agenda Motivation and Background
Leica Spider Infrastructure HW Solutions Introducing: Leica GR30 & GR50
 Leica Spider Infrastructure HW Solutions Introducing: Leica GR30 & GR50 Reliable solutions for today and tomorrow Leica Spider Integrated Solutions Introducing: Leica GR30 & GR50 Outline Introducing Leica
Leica Spider Infrastructure HW Solutions Introducing: Leica GR30 & GR50 Reliable solutions for today and tomorrow Leica Spider Integrated Solutions Introducing: Leica GR30 & GR50 Outline Introducing Leica
Precise Point Positioning (PPP) using
 using") Precise Point Positioning (PPP) using Product Technical Notes // May 2009 OnPOZ is a product line of Effigis. EZSurv is a registered trademark of Effigis. All other trademarks are registered or recognized
Precise Point Positioning (PPP) using Product Technical Notes // May 2009 OnPOZ is a product line of Effigis. EZSurv is a registered trademark of Effigis. All other trademarks are registered or recognized
RTCM State Space Representation (SSR) Overall Concepts Towards PPP-RTK
 Overall Concepts Towards PPP-RTK") RTCM State Space Representation (SSR) Overall Concepts Towards PPP-RTK Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de Contents Terms and Abbreviations RTCM-SSR Working Group GNSS Error Sources
RTCM State Space Representation (SSR) Overall Concepts Towards PPP-RTK Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de Contents Terms and Abbreviations RTCM-SSR Working Group GNSS Error Sources
GNSS POST-PROCESSING SOFTWARE
 GNSS POST-PROCESSING SOFTWARE Product Overview // July 2018 EZSURV POST-PROCESSING SOFTWARE EZSurv software is designed to edit, process and analyze raw GNSS (Global Navigation Satellite System) data to
GNSS POST-PROCESSING SOFTWARE Product Overview // July 2018 EZSURV POST-PROCESSING SOFTWARE EZSurv software is designed to edit, process and analyze raw GNSS (Global Navigation Satellite System) data to
GNSS Technology Update
 GNSS Technology Update Speaker: Eric Gakstatter Contributing Editor GPS World Editor - Geospatial Solutions Presented at: Association of Petroleum Surveying & Geomatics Houston, TX April 7, 2015 Agenda
GNSS Technology Update Speaker: Eric Gakstatter Contributing Editor GPS World Editor - Geospatial Solutions Presented at: Association of Petroleum Surveying & Geomatics Houston, TX April 7, 2015 Agenda
QGP Supply. GNSS Receiver User Manual Version 3.1 UBX-M8030
 UBX-M8030 GNSS Receiver User Manual Version: 3.1 Table of Contents Overview... 3 Getting Started... 3 Applications... 4 Packing List... 5 Main Features... 5 Specifications... 6 Overview The GNSS Receiver
UBX-M8030 GNSS Receiver User Manual Version: 3.1 Table of Contents Overview... 3 Getting Started... 3 Applications... 4 Packing List... 5 Main Features... 5 Specifications... 6 Overview The GNSS Receiver
The Possibility of Precise Automobile Navigation using GPS/QZS L5 and (Galileo E5) Pseudo ranges
 Pseudo ranges") The Possibility of Precise Automobile Navigation using GPS/QZS L5 and (Galileo E5 Pseudo ranges ION ITM ITM 013 Hiroko Tokura, Taro Suzuki, Tomoji Takasu, Nobuaki Kubo (Tokyo University of Marine Scienceand
The Possibility of Precise Automobile Navigation using GPS/QZS L5 and (Galileo E5 Pseudo ranges ION ITM ITM 013 Hiroko Tokura, Taro Suzuki, Tomoji Takasu, Nobuaki Kubo (Tokyo University of Marine Scienceand
One Source for Positioning Success
 novatel.com One Source for Positioning Success RTK, PPP, SBAS OR DGNSS. NOVATEL CORRECT OPTIMIZES ALL CORRECTION SOURCES, PUTTING MORE POWER, FLEXIBILITY AND CONTROL IN YOUR HANDS. NovAtel CORRECT is the
novatel.com One Source for Positioning Success RTK, PPP, SBAS OR DGNSS. NOVATEL CORRECT OPTIMIZES ALL CORRECTION SOURCES, PUTTING MORE POWER, FLEXIBILITY AND CONTROL IN YOUR HANDS. NovAtel CORRECT is the
Towards a EUREF Service Providing Real-time GNSS Clock and Orbit Corrections
 Towards a EUREF Service Providing Real-time GNSS Clock and Orbit Corrections G. Weber 1), W. Söhne 1), A. Stürze 1), L. Mervart 2) 1) Federal Agency for Cartography and Geodesy, Frankfurt am Main, Germany
Towards a EUREF Service Providing Real-time GNSS Clock and Orbit Corrections G. Weber 1), W. Söhne 1), A. Stürze 1), L. Mervart 2) 1) Federal Agency for Cartography and Geodesy, Frankfurt am Main, Germany
PosKEN Related Activities in the Czech Republic
 Research Institute of Geodesy, Topography, and Cartography Geodetic Observatory Pecny Land Survey Office, Prague PosKEN Related Activities in the Czech Republic 2014-2015 National Report J. Šimek 1 and
Research Institute of Geodesy, Topography, and Cartography Geodetic Observatory Pecny Land Survey Office, Prague PosKEN Related Activities in the Czech Republic 2014-2015 National Report J. Šimek 1 and
TRIUMPH-LS. The Ultimate RTK Land Survey Machine
 The Ultimate RTK Land Survey Machine Introducing GUIDE data collection in the. Visual Stake-out, navigation, six parallel RTK engines, over 3,000 coordinate conversions, advanced CoGo features, rich attribute
The Ultimate RTK Land Survey Machine Introducing GUIDE data collection in the. Visual Stake-out, navigation, six parallel RTK engines, over 3,000 coordinate conversions, advanced CoGo features, rich attribute
Enhancing global PPP with Local Ionospheric Corrections
 Enhancing global PPP with Local Ionospheric Corrections Suelynn Choy 1, Ken Harima 1, Satoshi Kogure 2 1 School of Mathematical and Geospatial Sciences, RMIT University, Australia 2 Satellite Navigation
Enhancing global PPP with Local Ionospheric Corrections Suelynn Choy 1, Ken Harima 1, Satoshi Kogure 2 1 School of Mathematical and Geospatial Sciences, RMIT University, Australia 2 Satellite Navigation
ICG WG-B Achievements on Interoperable GNSS Space Service Volume (SSV) November, 2016 Sochi, Russian Federation
 November, 2016 Sochi, Russian Federation") ICG WG-B Achievements on Interoperable GNSS Space Service Volume (SSV) November, 2016 Sochi, Russian Federation ICG WG-B Action Group on SSV Action group on SSV was formed within WG-B in order to Establish
ICG WG-B Achievements on Interoperable GNSS Space Service Volume (SSV) November, 2016 Sochi, Russian Federation ICG WG-B Action Group on SSV Action group on SSV was formed within WG-B in order to Establish