Kalman Filter Based Integer Ambiguity. Ionosphere and Troposphere Estimation
|
|
|
- Dayna McCoy
- 5 years ago
- Views:
Transcription
1 ION GNSS 2010 Kalman Filter Based Integer Ambiguity Resolution Strategy t for Long Baseline RTK with Ionosphere and Troposphere Estimation Tokyo University of Marine Science and Technology Tomoji jitakasu and Akio YASUDA
2 Contents Background Strategy for Long Baseline RTK Implementation Performance Evaluation Conclusion and Future Work 2
3 Background 3
4 RTK GPS/GNSS Real Time Kinematic GPS/GNSS cm level accuracy in real time Kinematic positions of moving receiver (rover) Carrier Phase Based Relative Positioning Transmit reference data to rover via wireless link Must resolve integer ambiguityon on the fly (OTF) Performance Depends on Baseline Length Reference Station Baseline Rover Receiver 4





5 Effect of Baseline Length E W BL=0.3 km E W BL=13.3 km U D U D N N S S BL=32.2 km BL=60.9 km U D U D N S N S E W E W (24 hr Kinematic : Fixed Solution : Float Solution) 5
6 Baseline Length and RTK Strategy BL (km) Error Elimination Ephem Ionos Tropos Others Strategy S 0 10 Broadcast M 10 L Conventional RTK 10 Dual Freq Broadcast 100 Interpolation Network RTK 100 1,000 VL >1,000 Real time Precise Dual Freq Estimate Long Earth Baseline ZTD + MF Tides (IGU) RTK Non RT Earth Post Estimate Precise Dual Freq Tides, Processing ZTD + MF (IGR, IGS) Ph WU or PPP 6





7 Application of Long Baseline RTK 100 km 1,000 km GPS Tsunami Monitoring System (Currently ~15 km off shore) 7
8 Strategy for Long Baseline RTK 8
9 Conventional AR Strategies Short Baseline RTK Rapid initialization/re initialization (OTF AR) Efficient integer vector search algorithm Ionosphere negligible in DD equations Medium/Long Baseline Post Processing Estimate WL/NL amb. by forming iono free LC Sequential rounding of WL/NL ambiguities Slow convergence Larger noise due to LC in kinematic i mode 9
10 Linear Combinations Coefficients Terms in DD Equation DD LC Noise Φ 1 Φ 2 P 1 P 2 R+T I 1 N 1 N 2 (cm) L1 λ λ L2 λ 2 1 γ λ P P2 1 1 γ 60 Notes 1 2 L3 C 1 λ 1 C 2 λ C 1 λ 1 C 2 λ Iono Free λ MW λ WL λ NL λ NL WL 0 0 λ LC /λ 1 /λ WL λ WL 42 2 (L1+P1)/2 λ 1 /2 1/2 1 0 λ 1 /2 30 Alt. Iono (L2+P2)/2 λ 2 /2 1/2 1 0 λ 2 /2 30 Free λ 1 =19cm, λ 2 =24cm, λ WL =86cm, λ NL =11cm, γ=f 12 /f 22, C 1 = γ/(γ 1), C 2 = 1/(γ 1) 10
11 AR Strategy for Long Baseline RTK No Linear Combination (LC) Use all original phase and code observables Not generate WL or NL LC Estimate ionosphere terms explicitly Suppress carrier phase noises Directly Resolve L1 and L2 Ambiguities (N 1, N 2 ) Search integer vector under ILS condition Efficient process by LAMBDA/MLAMBDA with shrinking space by linear transformation 11
12 Other Strategies Extended Kalman Filter for Real Time Est. Ephemeris IGU Predicted Orbit (Accuracy ~5 cm) Troposphere Estimate ZWD and gradient at ref and rover sites with mapping function (NMF) Other Corrections Receiver/satellite antenna PCV: IGS05.ATX Earth tides: solid earth tide model by IERS 12
13 Results by Simple Implementation : Fixed Solution : Float Solution AR Ratio Factor U D N S E W BL=300.0 km STD=2.2,2.3,3.2cm, Fix Ratio=46.4% 13
14 Partial Fixing of Ambiguities Search Type AR Strategy under ILS Condition All of ambiguities should be fixed at the same time Rising satellites often disturb ambiguity fixing Not tall Ambiguities iti must be Fixed Trade off between accuracy vs. fixing ratio Some Criteria to Determine Fixed or Float Variance of estimated ambiguity Duration of continuous valid data Satellite elevation angle 14
15 Feedback Fixed Ambiguity to Filter Open Loop AR Rover RTK Filter Ref. Float Solution Ambiguity Resolution Fixed Solution Fix and Hold Mode Rover Ref. RTK Filter Float Solution Integer Constraint for Fixed Ambiguities Fixed Solution Ambiguity it Resolution 15
16 Performance Improvement : Fixed Solution : Float Solution AR Ratio Factor U D N S E W BL=300.0 km STD=1.1,1.9,3.5cm, Fix Ratio=99.3% 16
17 Implementation 17



18 RTKLIB v241b v.2.4.1b Open source program package for GNSS positioning Whole source codes are freely available License: GPLv downloads (2.3.0) Portable library + several APs ANSI C + socket/pthread Portable command line APs GUI APs for Windows 18





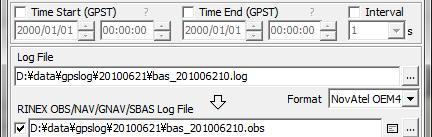
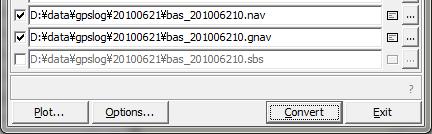
19 RTKLIB APs on Windows RTKNAVI: Real time AP RTKPOST: Post Processing RTKPLOT: Plotting solutions RTKCONV: RINEX converter 19
20 Tests for Performance Evaluation 20
 July 1 7, 2009 (Summer) 30 s x 1 week RINEX Rover: 477GEONET")
21 Offline Test BL= 29.9 km 1,099.9 km 1,000 km 2110 Tsukuba1 January1 7 7, 2009 (Winter) July 1 7, 2009 (Summer) 30 s x 1 week RINEX Rover: 477GEONET Stations Reference: GEONET 2110Tsukuba1 Ephemeris: IGU (predicted) Analysis S/W: RTKPOST v2.4.1b 21






22 Offline Test Results E W BL=471.2 km January 1 7, 2009 July 1 7, 2009 U D N S E W STD=0.7,0.9,2.3 cm FIX=99.8% BL=961.3 km STD=1.1,1.3,3.8 cm FIX=99.0% S N U D STD=1.6,1.3,3.0 cm FIX=98.8% STD=1.1,1.5,3.6 cm FIX=96.2% 22





23 Summary of Offline Test Results January 1 7, 2009 July 1 7, 2009 Ave=0.7,0.9,2.6cm Ave=1.4,1.6,5.2cm 0 0 Ave=97.8% Ave=93.4% Baseline Length (km) Baseline Length (km) 23

24 Real Time Test September 17 20, Hz x 72 H SUWN MIZU Rover: NovAtel BL= OEMV 3 + GPS 702 GG BL= km Reference: 1,024.8 km Rover IGS MIZU and SUWN MIZU SUWN BKG IGS IP Server NTRIP+RTCM v.3 CDDIS Receiver FTP (every 6H) RTKNAVI v.2.4.1b 24
25 Real Time Test Results (1) E W BL=435.7 km, STD=3.0,2.7,7.4cm, FIX=93.5% D U S N E W BL= km, STD=3.3,2.9,7.8cm, FIX=56.9% U D S N 25
26 Real Time Test Results (2) BL=435.7 km Ratio Factor Latency # of Sat BL= km 26 Ratio Factor Latency # of Sat
27 Conclusion and Future Work 27
28 Conclusion and Future Work A strategy for long baseline RTK proposed Offline test in 30 1,100 km baselines Real time test in 436 and 1,025 km baselines Proposed strategy works well up to 1,000 km baseline Performance degraded in summer time Need integration of meteorological info to improve troposphere correction 28
An introduction to RTKLIB open source GNSS processing software. Ryan Ruddick and Suelynn Choy
 An introduction to RTKLIB open source GNSS processing software Ryan Ruddick and Suelynn Choy 1 Resources RTKLIB homepage http://www.rtklib.com GIT repository https://github.com/tomojitakasu/rtklib/ Windows
An introduction to RTKLIB open source GNSS processing software Ryan Ruddick and Suelynn Choy 1 Resources RTKLIB homepage http://www.rtklib.com GIT repository https://github.com/tomojitakasu/rtklib/ Windows
Asia Oceania Regional Workshop on GNSS Precise Point Positioning Experiment by using QZSS LEX
 Asia Oceania Regional Workshop on GNSS 2010 Precise Point Positioning Experiment by using QZSS LEX Tomoji TAKASU Tokyo University of Marine Science and Technology Contents Introduction of QZSS LEX Evaluation
Asia Oceania Regional Workshop on GNSS 2010 Precise Point Positioning Experiment by using QZSS LEX Tomoji TAKASU Tokyo University of Marine Science and Technology Contents Introduction of QZSS LEX Evaluation
Effect of Quasi Zenith Satellite (QZS) on GPS Positioning
 on GPS Positioning") Effect of Quasi Zenith Satellite (QZS) on GPS ing Tomoji Takasu 1, Takuji Ebinuma 2, and Akio Yasuda 3 Laboratory of Satellite Navigation, Tokyo University of Marine Science and Technology 1 (Tel: +81-5245-7365,
Effect of Quasi Zenith Satellite (QZS) on GPS ing Tomoji Takasu 1, Takuji Ebinuma 2, and Akio Yasuda 3 Laboratory of Satellite Navigation, Tokyo University of Marine Science and Technology 1 (Tel: +81-5245-7365,
Development of an Open Source Multi GNSS Data Processing Software
 2nd Asia Oceania Regional Workshop on GNSS 2010 Development of an Open Source Multi GNSS Data Processing Software Tomoji TAKASU Tokyo University of Marine Science and Technology Contents Introduction Issues
2nd Asia Oceania Regional Workshop on GNSS 2010 Development of an Open Source Multi GNSS Data Processing Software Tomoji TAKASU Tokyo University of Marine Science and Technology Contents Introduction Issues
ION GNSS 2011 FILLING IN THE GAPS OF RTK WITH REGIONAL PPP
 ION GNSS 2011 FILLING IN THE GAPS OF RTK WITH REGIONAL PPP SEPTEMBER 22 th, 2011 ION GNSS 2011. PORTLAND, OREGON, USA SESSION F3: PRECISE POSITIONING AND RTK FOR CIVIL APPLICATION C. García A. Mozo P.
ION GNSS 2011 FILLING IN THE GAPS OF RTK WITH REGIONAL PPP SEPTEMBER 22 th, 2011 ION GNSS 2011. PORTLAND, OREGON, USA SESSION F3: PRECISE POSITIONING AND RTK FOR CIVIL APPLICATION C. García A. Mozo P.
RTCM State Space Representation (SSR) Overall Concepts Towards PPP-RTK
 Overall Concepts Towards PPP-RTK") RTCM State Space Representation (SSR) Overall Concepts Towards PPP-RTK Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de Contents Terms and Abbreviations RTCM-SSR Working Group GNSS Error Sources
RTCM State Space Representation (SSR) Overall Concepts Towards PPP-RTK Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de Contents Terms and Abbreviations RTCM-SSR Working Group GNSS Error Sources
Skytraq Manual (Single frequency receiver) Procedure to logging skytraq data with RTKNAVI
 Procedure to logging skytraq data with RTKNAVI") Tokyo University of Marine Science and Technology Skytraq Manual (Single frequency receiver) Procedure to logging skytraq data with RTKNAVI TUMSAT 1 Skytraq Receiver http://www.skytraq.com.tw/products/products.html
Tokyo University of Marine Science and Technology Skytraq Manual (Single frequency receiver) Procedure to logging skytraq data with RTKNAVI TUMSAT 1 Skytraq Receiver http://www.skytraq.com.tw/products/products.html
Precise Point Positioning (PPP) using
 using") Precise Point Positioning (PPP) using Product Technical Notes // May 2009 OnPOZ is a product line of Effigis. EZSurv is a registered trademark of Effigis. All other trademarks are registered or recognized
Precise Point Positioning (PPP) using Product Technical Notes // May 2009 OnPOZ is a product line of Effigis. EZSurv is a registered trademark of Effigis. All other trademarks are registered or recognized
Development of Multi-GNSS Orbit and Clock Determination Software "MADOCA"
 The 5th Asia Oceania Regional Workshop on GNSS Development of Multi-GNSS Orbit and Clock Determination Software "MADOCA" Tokyo Univ. of Marine Science and Technology Tomoji TAKASU December 1-3, 2013 @Hanoi
The 5th Asia Oceania Regional Workshop on GNSS Development of Multi-GNSS Orbit and Clock Determination Software "MADOCA" Tokyo Univ. of Marine Science and Technology Tomoji TAKASU December 1-3, 2013 @Hanoi
Positioning Techniques. João F. Galera Monico - UNESP Tuesday 12 Sep
 Positioning Techniques João F. Galera Monico - UNESP Tuesday 12 Sep Positioning methods Absolute Positioning Static and kinematic SPP and PPP Relative Positioning Static Static rapid Semi kinematic Kinematic
Positioning Techniques João F. Galera Monico - UNESP Tuesday 12 Sep Positioning methods Absolute Positioning Static and kinematic SPP and PPP Relative Positioning Static Static rapid Semi kinematic Kinematic
Geodetic Reference via Precise Point Positioning - RTK
 2012 Geo++ GmbH Geodetic Reference via Precise Point Positioning - RTK Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de 2012 Geo++ GmbH Contents Terms and Abbreviations GNSS Principles GNSS
2012 Geo++ GmbH Geodetic Reference via Precise Point Positioning - RTK Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de 2012 Geo++ GmbH Contents Terms and Abbreviations GNSS Principles GNSS
Precise Positioning GNSS Applications
 Precise Point Positioning: Is the Era of Differential GNSS Positioning Drawing to an End? School of Surveying & Spatial Information Systems, UNSW, Sydney, Australia Chris Rizos 1, Volker Janssen 2, Craig
Precise Point Positioning: Is the Era of Differential GNSS Positioning Drawing to an End? School of Surveying & Spatial Information Systems, UNSW, Sydney, Australia Chris Rizos 1, Volker Janssen 2, Craig
ORBITS AND CLOCKS FOR GLONASS PPP
 ION GNSS 2009 ORBITS AND CLOCKS FOR GLONASS PPP SEPTEMBER 22-25, 2009 - SAVANNAH, GEORGIA SESSION E3: PPP AND NETWORK-BASED RTK 1 D. Calle A. Mozo P. Navarro R. Píriz D. Rodríguez G. Tobías September 24,
ION GNSS 2009 ORBITS AND CLOCKS FOR GLONASS PPP SEPTEMBER 22-25, 2009 - SAVANNAH, GEORGIA SESSION E3: PPP AND NETWORK-BASED RTK 1 D. Calle A. Mozo P. Navarro R. Píriz D. Rodríguez G. Tobías September 24,
GNSS analysis software GSILIB for utilizing Multi- GNSS data
 Technical Seminar Reference Frame in Practice, GNSS analysis software GSILIB for utilizing Multi- GNSS data *Satoshi Kawamoto, Naofumi Takamatsu Geospatial Information Authority of Japan Sponsors: Geospatial
Technical Seminar Reference Frame in Practice, GNSS analysis software GSILIB for utilizing Multi- GNSS data *Satoshi Kawamoto, Naofumi Takamatsu Geospatial Information Authority of Japan Sponsors: Geospatial
Modelling GPS Observables for Time Transfer
 Modelling GPS Observables for Time Transfer Marek Ziebart Department of Geomatic Engineering University College London Presentation structure Overview of GPS Time frames in GPS Introduction to GPS observables
Modelling GPS Observables for Time Transfer Marek Ziebart Department of Geomatic Engineering University College London Presentation structure Overview of GPS Time frames in GPS Introduction to GPS observables
PPP with Ambiguity Resolution (AR) using RTCM-SSR
 using RTCM-SSR") PPP with Ambiguity Resolution (AR) using RTCM-SSR Gerhard Wübbena, Martin Schmitz, Andreas Bagge Geo++ GmbH 30827 Garbsen Germany www.geopp.de PPP with Ambiguity Resolution (AR) using RTCM-SSR Abstract
PPP with Ambiguity Resolution (AR) using RTCM-SSR Gerhard Wübbena, Martin Schmitz, Andreas Bagge Geo++ GmbH 30827 Garbsen Germany www.geopp.de PPP with Ambiguity Resolution (AR) using RTCM-SSR Abstract
Introduction to GNSS Base-Station
 Introduction to GNSS Base-Station Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 Introduction GPS or GNSS observation
Introduction to GNSS Base-Station Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 Introduction GPS or GNSS observation
Research Activities and Education in TUMSAT
 Research Activities and Education in TUMSAT 2011/09/07 @ ICG-6 Akio Yasuda Tokyo University of Marine Science & Technology 1 Content Tokyo University of Marine Science and Technology Etchujima Campus of
Research Activities and Education in TUMSAT 2011/09/07 @ ICG-6 Akio Yasuda Tokyo University of Marine Science & Technology 1 Content Tokyo University of Marine Science and Technology Etchujima Campus of
magicgnss: QUALITY DATA, ALGORITHMS AND PRODUCTS FOR THE GNSS USER COMMUNITY
 SEMANA GEOMATICA 2009 magicgnss: QUALITY DATA, ALGORITHMS AND PRODUCTS FOR THE GNSS USER COMMUNITY MARCH 3, 2009 BARCELONA, SPAIN SESSION: GNSS PRODUCTS A. Mozo P. Navarro R. Píriz D. Rodríguez March 3,
SEMANA GEOMATICA 2009 magicgnss: QUALITY DATA, ALGORITHMS AND PRODUCTS FOR THE GNSS USER COMMUNITY MARCH 3, 2009 BARCELONA, SPAIN SESSION: GNSS PRODUCTS A. Mozo P. Navarro R. Píriz D. Rodríguez March 3,
SPEEDING UP FILTER CONVERGENCE IN HIGH PRECISION, VERY LARGE AREA KINEMATIC NAVIGATION
 IMA HOT TOPICS WORKSHOP: Mathematical Challenges in Global Positioning Systems (GPS) University of Minnessota, 16-19 August 2000 SPEEDING UP FILTER CONVERGENCE IN HIGH PRECISION, VERY LARGE AREA KINEMATIC
IMA HOT TOPICS WORKSHOP: Mathematical Challenges in Global Positioning Systems (GPS) University of Minnessota, 16-19 August 2000 SPEEDING UP FILTER CONVERGENCE IN HIGH PRECISION, VERY LARGE AREA KINEMATIC
A Differential Reference Station Algorithm For Modular Decentralized GPS/GNSS Master Station Architecture. Oct. 28, 2010
 212-1-29 International Symposium on GPS/GNSS 21 Oct. 26-28, National Cheng Kung Univ., Taiwan A Differential Reference Station Algorithm For Modular Decentralized GPS/GNSS Master Station Architecture Oct.
212-1-29 International Symposium on GPS/GNSS 21 Oct. 26-28, National Cheng Kung Univ., Taiwan A Differential Reference Station Algorithm For Modular Decentralized GPS/GNSS Master Station Architecture Oct.
Precise Positioning with NovAtel CORRECT Including Performance Analysis
 Precise Positioning with NovAtel CORRECT Including Performance Analysis NovAtel White Paper April 2015 Overview This article provides an overview of the challenges and techniques of precise GNSS positioning.
Precise Positioning with NovAtel CORRECT Including Performance Analysis NovAtel White Paper April 2015 Overview This article provides an overview of the challenges and techniques of precise GNSS positioning.
Bernese GPS Software 4.2
 Bernese GPS Software 4.2 Introduction Signal Processing Geodetic Use Details of modules Bernese GPS Software 4.2 Highest Accuracy GPS Surveys Research and Education Big Permanent GPS arrays Commercial
Bernese GPS Software 4.2 Introduction Signal Processing Geodetic Use Details of modules Bernese GPS Software 4.2 Highest Accuracy GPS Surveys Research and Education Big Permanent GPS arrays Commercial
Jun CHEN. Differential GNSS positioning with low-cost receivers. Background. Objective: Methods:
 Jun CHEN Differential GNSS positioning with low-cost receivers Duration of the Thesis: 6 months Completion: May 2013 Tutor: Prof. Dr. sc.-techn. Wolfgang Keller Dr. Maorong Ge (Potsdam-GFZ) Examiner: Prof.
Jun CHEN Differential GNSS positioning with low-cost receivers Duration of the Thesis: 6 months Completion: May 2013 Tutor: Prof. Dr. sc.-techn. Wolfgang Keller Dr. Maorong Ge (Potsdam-GFZ) Examiner: Prof.
Multisystem Real Time Precise-Point-Positioning, today with GPS+GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS
 2 International Symposium on /GNSS October 26-28, 2. Multisystem Real Time Precise-Point-Positioning, today with +GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS Álvaro Mozo García,
2 International Symposium on /GNSS October 26-28, 2. Multisystem Real Time Precise-Point-Positioning, today with +GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS Álvaro Mozo García,
Comparative analysis of GNSS Real Time Kinematic methods for navigation
 IAV Hassan II Comparative analysis of GNSS Real Time Kinematic methods for navigation Mourad BOUZIANI School of Geomatic Sciences, IAV Hassan II, Rabat, Morocco. Coordinator of the Master - GNSS, IAV&
IAV Hassan II Comparative analysis of GNSS Real Time Kinematic methods for navigation Mourad BOUZIANI School of Geomatic Sciences, IAV Hassan II, Rabat, Morocco. Coordinator of the Master - GNSS, IAV&
Capacity Building Activities on GNSS in Japan
 Capacity Building Activities on GNSS in Japan Hiroaki Tateshita Japan Aerospace Exploration Agency Akio Yasuda Tokyo University of Marine Science & Technology 1 Contents Back ground of Geospatial Information
Capacity Building Activities on GNSS in Japan Hiroaki Tateshita Japan Aerospace Exploration Agency Akio Yasuda Tokyo University of Marine Science & Technology 1 Contents Back ground of Geospatial Information
Performance Evaluation of the Effect of QZS (Quasi-zenith Satellite) on Precise Positioning
 on Precise Positioning") Performance Evaluation of the Effect of QZS (Quasi-zenith Satellite) on Precise Positioning Nobuaki Kubo, Tomoko Shirai, Tomoji Takasu, Akio Yasuda (TUMST) Satoshi Kogure (JAXA) Abstract The quasi-zenith
Performance Evaluation of the Effect of QZS (Quasi-zenith Satellite) on Precise Positioning Nobuaki Kubo, Tomoko Shirai, Tomoji Takasu, Akio Yasuda (TUMST) Satoshi Kogure (JAXA) Abstract The quasi-zenith
Integer Ambiguity Resolution for Precise Point Positioning Patrick Henkel
 Integer Ambiguity Resolution for Precise Point Positioning Patrick Henkel Overview Introduction Sequential Best-Integer Equivariant Estimation Multi-frequency code carrier linear combinations Galileo:
Integer Ambiguity Resolution for Precise Point Positioning Patrick Henkel Overview Introduction Sequential Best-Integer Equivariant Estimation Multi-frequency code carrier linear combinations Galileo:
GNSS Buoy Array in the Ocean for a Synthetic Geohazards Monitoring System
 GNSS Buoy Array in the Ocean for a Synthetic Geohazards Monitoring System Teruyuki Kato, Earthq. Res. Inst., Univ. Tokyo, Japan Yukihiro Terada, Nat. Inst. Tech., Kochi Col., Japan Keiichi Tadokoro, Grad.
GNSS Buoy Array in the Ocean for a Synthetic Geohazards Monitoring System Teruyuki Kato, Earthq. Res. Inst., Univ. Tokyo, Japan Yukihiro Terada, Nat. Inst. Tech., Kochi Col., Japan Keiichi Tadokoro, Grad.
ProMark 3 RTK. White Paper
 ProMark 3 RTK White Paper Table of Contents 1. Introduction... 1 2. ProMark3 RTK Operational Environment... 2 3. BLADE TM : A Unique Magellan Technology for Quicker Convergence... 3 4. ProMark3 RTK Fixed
ProMark 3 RTK White Paper Table of Contents 1. Introduction... 1 2. ProMark3 RTK Operational Environment... 2 3. BLADE TM : A Unique Magellan Technology for Quicker Convergence... 3 4. ProMark3 RTK Fixed
Trimble Business Center:
 Trimble Business Center: Modernized Approaches for GNSS Baseline Processing Trimble s industry-leading software includes a new dedicated processor for static baselines. The software features dynamic selection
Trimble Business Center: Modernized Approaches for GNSS Baseline Processing Trimble s industry-leading software includes a new dedicated processor for static baselines. The software features dynamic selection
Filling in the gaps of RTK with Regional PPP
 Filling in the gaps of RTK with Regional PPP Guillermo Tobías, GMV, Spain Cristina García, GMV, Spain Álvaro Mozo, GMV, Spain Pedro Navarro, GMV, Spain Ricardo Píriz, GMV, Spain Irma Rodríguez, GMV, Spain
Filling in the gaps of RTK with Regional PPP Guillermo Tobías, GMV, Spain Cristina García, GMV, Spain Álvaro Mozo, GMV, Spain Pedro Navarro, GMV, Spain Ricardo Píriz, GMV, Spain Irma Rodríguez, GMV, Spain
Precise Point Positioning Developments at GSD: Products, Services
 Precise Point Positioning Developments at GSD: Products, Services F. Lahaye, P. Collins, Y. Mireault, P. Tétreault, M. Caissy Geodetic Survey Division, Natural Resources Canada (NRCan) GEOIDE - PPP Workshop
Precise Point Positioning Developments at GSD: Products, Services F. Lahaye, P. Collins, Y. Mireault, P. Tétreault, M. Caissy Geodetic Survey Division, Natural Resources Canada (NRCan) GEOIDE - PPP Workshop
New Approach for Tsunami Detection Based on RTK-GNSS Using Network of Ships
 New Approach for Tsunami Detection Based on RTK-GNSS Using Network of Ships Tokyo University of Marine Science and Technology Ryuta Nakaosone Nobuaki Kubo Background After the Indian Ocean Tsunami on 2004,
New Approach for Tsunami Detection Based on RTK-GNSS Using Network of Ships Tokyo University of Marine Science and Technology Ryuta Nakaosone Nobuaki Kubo Background After the Indian Ocean Tsunami on 2004,
GNSS buoy array in the ocean for natural hazard mitigation. Teruyuki KATO Earthquake Research Institute the University of Tokyo, Japan
 GNSS buoy array in the ocean for natural hazard mitigation Teruyuki KATO Earthquake Research Institute the University of Tokyo, Japan 1 GNSS applications in Earth science From static to high-rate observations
GNSS buoy array in the ocean for natural hazard mitigation Teruyuki KATO Earthquake Research Institute the University of Tokyo, Japan 1 GNSS applications in Earth science From static to high-rate observations
EFTF 2012 Smartphone application for the near-real time synchronization and monitoring of clocks through a network of GNSS receivers
 EFTF 2012 Smartphone application for the near-real time synchronization and monitoring of clocks through a network of GNSS receivers APRIL 26 th, 2012 GÖTEBORG, SWEDEN SESSION C3L-B: GNSS AND APPLICATIONS
EFTF 2012 Smartphone application for the near-real time synchronization and monitoring of clocks through a network of GNSS receivers APRIL 26 th, 2012 GÖTEBORG, SWEDEN SESSION C3L-B: GNSS AND APPLICATIONS
AUTONOMOUS ISOTROPY-BASED INTEGRITY USING GPS AND GLONASS
 ION GNSS 2010 AUTONOMOUS ISOTROPY-BASED INTEGRITY USING GPS AND GLONASS SEPTEMBER 21-24, 2010 - PORTLAND, OREGON SESSION E4: INTEGRITY MONITORING FOR NEXT GENERATION APPLICATIONS M. Azaola D. Calle A.Mozo
ION GNSS 2010 AUTONOMOUS ISOTROPY-BASED INTEGRITY USING GPS AND GLONASS SEPTEMBER 21-24, 2010 - PORTLAND, OREGON SESSION E4: INTEGRITY MONITORING FOR NEXT GENERATION APPLICATIONS M. Azaola D. Calle A.Mozo
Guochang Xu GPS. Theory, Algorithms and Applications. Second Edition. With 59 Figures. Sprin ger
 Guochang Xu GPS Theory, Algorithms and Applications Second Edition With 59 Figures Sprin ger Contents 1 Introduction 1 1.1 AKeyNoteofGPS 2 1.2 A Brief Message About GLONASS 3 1.3 Basic Information of Galileo
Guochang Xu GPS Theory, Algorithms and Applications Second Edition With 59 Figures Sprin ger Contents 1 Introduction 1 1.1 AKeyNoteofGPS 2 1.2 A Brief Message About GLONASS 3 1.3 Basic Information of Galileo
Fundamentals of GPS for high-precision geodesy
 Fundamentals of GPS for high-precision geodesy T. A. Herring M. A. Floyd R. W. King Massachusetts Institute of Technology, Cambridge, MA, USA UNAVCO Headquarters, Boulder, Colorado, USA 19 23 June 2017
Fundamentals of GPS for high-precision geodesy T. A. Herring M. A. Floyd R. W. King Massachusetts Institute of Technology, Cambridge, MA, USA UNAVCO Headquarters, Boulder, Colorado, USA 19 23 June 2017
GNSS Technologies. PPP and RTK
 PPP and RTK 22.03.2017 Content Carrier phase based positioning PPP RTK VRS Slides based on: GNSS Applications and Methods, by S. Gleason and D. Gebre-Egziabher (Eds.), Artech House Inc., 2009 http://www.gnssapplications.org/
PPP and RTK 22.03.2017 Content Carrier phase based positioning PPP RTK VRS Slides based on: GNSS Applications and Methods, by S. Gleason and D. Gebre-Egziabher (Eds.), Artech House Inc., 2009 http://www.gnssapplications.org/
GNSS Technologies. PPP and RTK
 PPP and RTK 29.02.2016 Content Carrier phase based positioning PPP RTK VRS Slides based on: GNSS Applications and Methods, by S. Gleason and D. Gebre-Egziabher (Eds.), Artech House Inc., 2009 http://www.gnssapplications.org/
PPP and RTK 29.02.2016 Content Carrier phase based positioning PPP RTK VRS Slides based on: GNSS Applications and Methods, by S. Gleason and D. Gebre-Egziabher (Eds.), Artech House Inc., 2009 http://www.gnssapplications.org/
One Source for Positioning Success
 novatel.com One Source for Positioning Success RTK, PPP, SBAS OR DGNSS. NOVATEL CORRECT OPTIMIZES ALL CORRECTION SOURCES, PUTTING MORE POWER, FLEXIBILITY AND CONTROL IN YOUR HANDS. NovAtel CORRECT is the
novatel.com One Source for Positioning Success RTK, PPP, SBAS OR DGNSS. NOVATEL CORRECT OPTIMIZES ALL CORRECTION SOURCES, PUTTING MORE POWER, FLEXIBILITY AND CONTROL IN YOUR HANDS. NovAtel CORRECT is the
Space Weather influence on satellite based navigation and precise positioning
 Space Weather influence on satellite based navigation and precise positioning R. Warnant, S. Lejeune, M. Bavier Royal Observatory of Belgium Avenue Circulaire, 3 B-1180 Brussels (Belgium) What this talk
Space Weather influence on satellite based navigation and precise positioning R. Warnant, S. Lejeune, M. Bavier Royal Observatory of Belgium Avenue Circulaire, 3 B-1180 Brussels (Belgium) What this talk
An Introduction to GPS
 An Introduction to GPS You are here The GPS system: what is GPS Principles of GPS: how does it work Processing of GPS: getting precise results Yellowstone deformation: an example What is GPS? System to
An Introduction to GPS You are here The GPS system: what is GPS Principles of GPS: how does it work Processing of GPS: getting precise results Yellowstone deformation: an example What is GPS? System to
Multi-Constellation GNSS Precise Point Positioning using GPS, GLONASS and BeiDou in Australia
 International Global Navigation Satellite Systems Society IGNSS Symposium 2015 Multi-Constellation GNSS Precise Point Positioning using GPS, GLONASS and BeiDou in Australia Xiaodong Ren 1,Suelynn Choy
International Global Navigation Satellite Systems Society IGNSS Symposium 2015 Multi-Constellation GNSS Precise Point Positioning using GPS, GLONASS and BeiDou in Australia Xiaodong Ren 1,Suelynn Choy
Performance Evaluation Of Real Time Precise Point Positioning (RT-PPP) In Static & Kinematic Modes In Egypt
 In Static & Kinematic Modes In Egypt") Performance Evaluation Of Real Time Precise Point Positioning (RT-PPP) In Static & Kinematic Modes In Egypt Eng. Ahmed Mansour Abdallah Dr. Mahmoud Abd Rabbou Prof. Adel El.shazly Geomatic Branch, Civil
Performance Evaluation Of Real Time Precise Point Positioning (RT-PPP) In Static & Kinematic Modes In Egypt Eng. Ahmed Mansour Abdallah Dr. Mahmoud Abd Rabbou Prof. Adel El.shazly Geomatic Branch, Civil
Performance Evaluation of Multiple Reference Station GPS RTK for a Medium Scale Network
 Journal of Global Positioning Systems (2004) Vol. 3, No. 12: 173182 Performance Evaluation of Multiple Reference Station GPS RTK for a Medium Scale Network T.H. Diep Dao, Paul Alves and Gérard Lachapelle
Journal of Global Positioning Systems (2004) Vol. 3, No. 12: 173182 Performance Evaluation of Multiple Reference Station GPS RTK for a Medium Scale Network T.H. Diep Dao, Paul Alves and Gérard Lachapelle
Wednesday AM: (Doug) 2. PS and Long Period Signals
 2. PS and Long Period Signals") Wednesday AM: (Doug) 2 PS and Long Period Signals What is Colorado famous for? 32 satellites 12 Early on in the world of science synchronization of clocks was found to be important. consider Paris: puffs
Wednesday AM: (Doug) 2 PS and Long Period Signals What is Colorado famous for? 32 satellites 12 Early on in the world of science synchronization of clocks was found to be important. consider Paris: puffs
THE INFLUENCE OF ZENITH TROPOSPHERIC DELAY ON PPP-RTK. S. Nistor a, *, A.S. Buda a,
 THE INFLUENCE OF ZENITH TROPOSPHERIC DELAY ON PPP-RTK S. Nistor a, *, A.S. Buda a, a University of Oradea, Faculty of Civil Engineering, Cadastre and Architecture, Department Cadastre-Architecture, Romania,
THE INFLUENCE OF ZENITH TROPOSPHERIC DELAY ON PPP-RTK S. Nistor a, *, A.S. Buda a, a University of Oradea, Faculty of Civil Engineering, Cadastre and Architecture, Department Cadastre-Architecture, Romania,
WHU s developments for the MGEX precise products and the GNSS ultra-rapid products
 IGS Workshop 2016 WHU s developments for the MGEX precise products and the GNSS ultra-rapid products Chuang Shi; Qile Zhao; Min Li; Jing Guo; Jingnan Liu Presented by Jianghui Geng GNSS Research Center,
IGS Workshop 2016 WHU s developments for the MGEX precise products and the GNSS ultra-rapid products Chuang Shi; Qile Zhao; Min Li; Jing Guo; Jingnan Liu Presented by Jianghui Geng GNSS Research Center,
Satellite Navigation Integrity and integer ambiguity resolution
 Satellite Navigation Integrity and integer ambiguity resolution Picture: ESA AE4E08 Sandra Verhagen Course 2010 2011, lecture 12 1 Today s topics Integrity and RAIM Integer Ambiguity Resolution Study Section
Satellite Navigation Integrity and integer ambiguity resolution Picture: ESA AE4E08 Sandra Verhagen Course 2010 2011, lecture 12 1 Today s topics Integrity and RAIM Integer Ambiguity Resolution Study Section
WHU's Developments for the GPS Ultra-Rapid Products and the COMPASS Precise Products
 WHU's Developments for the GPS Ultra-Rapid Products and the COMPASS Precise Products C. Shi; Q. Zhao; M. Li; Y. Lou; H. Zhang; W. Tang; Z. Hu; X. Dai; J. Guo; M.Ge; J. Liu 2012 International GNSS Workshop
WHU's Developments for the GPS Ultra-Rapid Products and the COMPASS Precise Products C. Shi; Q. Zhao; M. Li; Y. Lou; H. Zhang; W. Tang; Z. Hu; X. Dai; J. Guo; M.Ge; J. Liu 2012 International GNSS Workshop
PERSPECTIVES OF FREE GNSS POST-PROCESSING SOFTWARE USING
 XIII International forum «INTEREXPO GEO-Siberia 2017» PERSPECTIVES OF FREE GNSS POST-PROCESSING SOFTWARE USING S. Shevchuk, L. Lipatnikov, K. Malyutina (Siberian State University of Geosystems and Technologies)
XIII International forum «INTEREXPO GEO-Siberia 2017» PERSPECTIVES OF FREE GNSS POST-PROCESSING SOFTWARE USING S. Shevchuk, L. Lipatnikov, K. Malyutina (Siberian State University of Geosystems and Technologies)
E. Calais Purdue University - EAS Department Civil 3273
 E. Calais Purdue University - EAS Department Civil 373 ecalais@purdue.edu GPS signal propagation GPS signal (= carrier phase modulated by satellite PRN code) sent by satellite. About 66 msec (0,000 km)
E. Calais Purdue University - EAS Department Civil 373 ecalais@purdue.edu GPS signal propagation GPS signal (= carrier phase modulated by satellite PRN code) sent by satellite. About 66 msec (0,000 km)
Broadcast Ionospheric Model Accuracy and the Effect of Neglecting Ionospheric Effects on C/A Code Measurements on a 500 km Baseline
 Broadcast Ionospheric Model Accuracy and the Effect of Neglecting Ionospheric Effects on C/A Code Measurements on a 500 km Baseline Intro By David MacDonald Waypoint Consulting May 2002 The ionosphere
Broadcast Ionospheric Model Accuracy and the Effect of Neglecting Ionospheric Effects on C/A Code Measurements on a 500 km Baseline Intro By David MacDonald Waypoint Consulting May 2002 The ionosphere
GNSS OBSERVABLES. João F. Galera Monico - UNESP Tuesday 12 Sep
 GNSS OBSERVABLES João F. Galera Monico - UNESP Tuesday Sep Basic references Basic GNSS Observation Equations Pseudorange Carrier Phase Doppler SNR Signal to Noise Ratio Pseudorange Observation Equation
GNSS OBSERVABLES João F. Galera Monico - UNESP Tuesday Sep Basic references Basic GNSS Observation Equations Pseudorange Carrier Phase Doppler SNR Signal to Noise Ratio Pseudorange Observation Equation
ProMark 500 White Paper
 ProMark 500 White Paper How Magellan Optimally Uses GLONASS in the ProMark 500 GNSS Receiver How Magellan Optimally Uses GLONASS in the ProMark 500 GNSS Receiver 1. Background GLONASS brings to the GNSS
ProMark 500 White Paper How Magellan Optimally Uses GLONASS in the ProMark 500 GNSS Receiver How Magellan Optimally Uses GLONASS in the ProMark 500 GNSS Receiver 1. Background GLONASS brings to the GNSS
Asian Journal of Science and Technology Vol. 08, Issue, 11, pp , November, 2017 RESEARCH ARTICLE
 Available Online at http://www.journalajst.com ASIAN JOURNAL OF SCIENCE AND TECHNOLOGY ISSN: 0976-3376 Asian Journal of Science and Technology Vol. 08, Issue, 11, pp.6697-6703, November, 2017 ARTICLE INFO
Available Online at http://www.journalajst.com ASIAN JOURNAL OF SCIENCE AND TECHNOLOGY ISSN: 0976-3376 Asian Journal of Science and Technology Vol. 08, Issue, 11, pp.6697-6703, November, 2017 ARTICLE INFO
FieldGenius Technical Notes GPS Terminology
 FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
gogps a navigation software to enhance the accuracy of low-cost GPS receivers Eugenio Realini Mirko Reguzzoni Osaka City University, Japan
 gogps a navigation software to enhance the accuracy of low-cost GPS receivers Eugenio Realini Osaka City University, Japan Oct. 21st FOSS4G2009 Mirko Reguzzoni OGS c/o Politecnico di Milano, Italy Why
gogps a navigation software to enhance the accuracy of low-cost GPS receivers Eugenio Realini Osaka City University, Japan Oct. 21st FOSS4G2009 Mirko Reguzzoni OGS c/o Politecnico di Milano, Italy Why
MGA Webinar Series : 1 Very Cheap RTK Receivers: Changing the Landscape of Positioning Services
 MGA Webinar Series : 1 Very Cheap RTK Receivers: Changing the Landscape of Positioning Services Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp
MGA Webinar Series : 1 Very Cheap RTK Receivers: Changing the Landscape of Positioning Services Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp
Introduction to DGNSS
 Introduction to DGNSS Jaume Sanz Subirana J. Miguel Juan Zornoza Research group of Astronomy & Geomatics (gage) Technical University of Catalunya (UPC), Spain. Web site: http://www.gage.upc.edu Hanoi,
Introduction to DGNSS Jaume Sanz Subirana J. Miguel Juan Zornoza Research group of Astronomy & Geomatics (gage) Technical University of Catalunya (UPC), Spain. Web site: http://www.gage.upc.edu Hanoi,
New Tools for Network RTK Integrity Monitoring
 New Tools for Network RTK Integrity Monitoring Xiaoming Chen, Herbert Landau, Ulrich Vollath Trimble Terrasat GmbH BIOGRAPHY Dr. Xiaoming Chen is a software engineer at Trimble Terrasat. He holds a PhD
New Tools for Network RTK Integrity Monitoring Xiaoming Chen, Herbert Landau, Ulrich Vollath Trimble Terrasat GmbH BIOGRAPHY Dr. Xiaoming Chen is a software engineer at Trimble Terrasat. He holds a PhD
Global Products for GPS Point Positioning Approaching Real-Time
 Global Products for GPS Point Positioning Approaching Real-Time Y. Gao 1, P. Heroux 2 and M. Caissy 2 1 Department of Geomatics Engineering, University of Calgary 2 Geodetic Survey Division, Natural Resources
Global Products for GPS Point Positioning Approaching Real-Time Y. Gao 1, P. Heroux 2 and M. Caissy 2 1 Department of Geomatics Engineering, University of Calgary 2 Geodetic Survey Division, Natural Resources
Achieving 30 cm Autonomous Single Frequency GPS positioning
 Achieving 30 cm Autonomous Single Frequency GPS positioning Dr. Y. Zhang Nexteq Navigation Corporation 3535 Research Road NW Calgary, Alberta, Canada T2L 2K8 AGG 2009 www.nexteqnav.com 1 Outline Background
Achieving 30 cm Autonomous Single Frequency GPS positioning Dr. Y. Zhang Nexteq Navigation Corporation 3535 Research Road NW Calgary, Alberta, Canada T2L 2K8 AGG 2009 www.nexteqnav.com 1 Outline Background
Study and analysis of Differential GNSS and Precise Point Positioning
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 9, Issue 2 Ver. I (Mar Apr. 2014), PP 53-59 Study and analysis of Differential GNSS and Precise
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 9, Issue 2 Ver. I (Mar Apr. 2014), PP 53-59 Study and analysis of Differential GNSS and Precise
Fast convergence of Trimble CenterPoint RTX by regional augmentation
 Fast convergence of Trimble CenterPoint RTX by regional augmentation Dr. Ralf Drescher Trimble Terrasat GmbH, Munich EGU General Assembly 2015, Vienna Thursday, 16 April 2015 Outline Introduction CenterPoint
Fast convergence of Trimble CenterPoint RTX by regional augmentation Dr. Ralf Drescher Trimble Terrasat GmbH, Munich EGU General Assembly 2015, Vienna Thursday, 16 April 2015 Outline Introduction CenterPoint
Development and assessment of a medium-range real-time kinematic GPS algorithm using an ionospheric information filter
 LETTER Earth Planets Space, 52, 783 788, 2000 Development and assessment of a medium-range real-time kinematic GPS algorithm using an ionospheric information filter Ming Yang 1, Chin-Hsien Tang 1, and
LETTER Earth Planets Space, 52, 783 788, 2000 Development and assessment of a medium-range real-time kinematic GPS algorithm using an ionospheric information filter Ming Yang 1, Chin-Hsien Tang 1, and
Generation of Consistent GNSS SSR Corrections
 Generation of Consistent GNSS SSR Corrections for Distributed CORS Networks Jannes Wübbena, Martin Schmitz, Gerhard Wübbena Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Abstract Generation of Consistent
Generation of Consistent GNSS SSR Corrections for Distributed CORS Networks Jannes Wübbena, Martin Schmitz, Gerhard Wübbena Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Abstract Generation of Consistent
Towards a EUREF Service Providing Real-time GNSS Clock and Orbit Corrections
 Towards a EUREF Service Providing Real-time GNSS Clock and Orbit Corrections G. Weber 1), W. Söhne 1), A. Stürze 1), L. Mervart 2) 1) Federal Agency for Cartography and Geodesy, Frankfurt am Main, Germany
Towards a EUREF Service Providing Real-time GNSS Clock and Orbit Corrections G. Weber 1), W. Söhne 1), A. Stürze 1), L. Mervart 2) 1) Federal Agency for Cartography and Geodesy, Frankfurt am Main, Germany
GNSS (GPS) buoy array in the Pacific for natural disaster mitigation. Teruyuki KATO Earthquake Research Institute the University of Tokyo, Japan
 buoy array in the Pacific for natural disaster mitigation. Teruyuki KATO Earthquake Research Institute the University of Tokyo, Japan") GNSS (GPS) buoy array in the Pacific for natural disaster mitigation Teruyuki KATO Earthquake Research Institute the University of Tokyo, Japan 1 (Modified from Oki & Koketsu, 2011) Historical megaquakes
GNSS (GPS) buoy array in the Pacific for natural disaster mitigation Teruyuki KATO Earthquake Research Institute the University of Tokyo, Japan 1 (Modified from Oki & Koketsu, 2011) Historical megaquakes
Principles of the Global Positioning System Lecture 19
 12.540 Principles of the Global Positioning System Lecture 19 Prof. Thomas Herring http://geoweb.mit.edu/~tah/12.540 GPS Models and processing Summary: Finish up modeling aspects Rank deficiencies Processing
12.540 Principles of the Global Positioning System Lecture 19 Prof. Thomas Herring http://geoweb.mit.edu/~tah/12.540 GPS Models and processing Summary: Finish up modeling aspects Rank deficiencies Processing
The Possibility of Precise Automobile Navigation using GPS/QZS L5 and (Galileo E5) Pseudo ranges
 Pseudo ranges") The Possibility of Precise Automobile Navigation using GPS/QZS L5 and (Galileo E5 Pseudo ranges ION ITM ITM 013 Hiroko Tokura, Taro Suzuki, Tomoji Takasu, Nobuaki Kubo (Tokyo University of Marine Scienceand
The Possibility of Precise Automobile Navigation using GPS/QZS L5 and (Galileo E5 Pseudo ranges ION ITM ITM 013 Hiroko Tokura, Taro Suzuki, Tomoji Takasu, Nobuaki Kubo (Tokyo University of Marine Scienceand
Real-Time and Multi-GNSS Key Projects of the International GNSS Service
 Real-Time and Multi-GNSS Key Projects of the International GNSS Service Urs Hugentobler, Chris Rizos, Mark Caissy, Georg Weber, Oliver Montenbruck, Ruth Neilan EUREF 2013 Symposium Budapest, Hungary, May
Real-Time and Multi-GNSS Key Projects of the International GNSS Service Urs Hugentobler, Chris Rizos, Mark Caissy, Georg Weber, Oliver Montenbruck, Ruth Neilan EUREF 2013 Symposium Budapest, Hungary, May
Global Correction Services for GNSS
 Global Correction Services for GNSS Hemisphere GNSS Whitepaper September 5, 2015 Overview Since the early days of GPS, new industries emerged while existing industries evolved to use position data in real-time.
Global Correction Services for GNSS Hemisphere GNSS Whitepaper September 5, 2015 Overview Since the early days of GPS, new industries emerged while existing industries evolved to use position data in real-time.
Time Transfer with Integer PPP (IPPP) J. Delporte, F. Mercier, F. Perosanz (CNES) G. Petit (BIPM)
 J. Delporte, F. Mercier, F. Perosanz (CNES) G. Petit (BIPM)") Time Transfer with Integer PPP (IPPP) J. Delporte, F. Mercier, F. Perosanz (CNES) G. Petit (BIPM) Outline Time transfer GPS CP TT : advantages of integer ambiguity resolution GRG products Some results
Time Transfer with Integer PPP (IPPP) J. Delporte, F. Mercier, F. Perosanz (CNES) G. Petit (BIPM) Outline Time transfer GPS CP TT : advantages of integer ambiguity resolution GRG products Some results
Trimble GPSNet 2.5 Software for GNSS Infrastructure: New Features. Martin Janousek - Trimble Technical Support - Infrastructure
 Trimble GPSNet 2.5 Software for GNSS Infrastructure: New Features Martin Janousek - Trimble Technical Support - Infrastructure GPSNet Users Seminar Munich, March 30 th /31 th 2006 Overview Support for
Trimble GPSNet 2.5 Software for GNSS Infrastructure: New Features Martin Janousek - Trimble Technical Support - Infrastructure GPSNet Users Seminar Munich, March 30 th /31 th 2006 Overview Support for
Introduction to GNSS
 Introduction to GNSS Dimitrios Bolkas, Ph.D. Department of Surveying Engineering, Pennsylvania State University, Wilkes Barre Campus PSLS Surveyor s Conference Hershey, PA Global Navigation Satellite System
Introduction to GNSS Dimitrios Bolkas, Ph.D. Department of Surveying Engineering, Pennsylvania State University, Wilkes Barre Campus PSLS Surveyor s Conference Hershey, PA Global Navigation Satellite System
ION ITM Tokyo University of Marine Science and Technology H. Sridhara, N. Kubo, R.Kikuchi
 Single-Frequency Multi-GNSS RTK Positioning for Moving Platform ION ITM 215 215.1.27-29 Tokyo University of Marine Science and Technology H. Sridhara, N. Kubo, R.Kikuchi 1 Agenda Motivation and Background
Single-Frequency Multi-GNSS RTK Positioning for Moving Platform ION ITM 215 215.1.27-29 Tokyo University of Marine Science and Technology H. Sridhara, N. Kubo, R.Kikuchi 1 Agenda Motivation and Background
Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions
 Table of Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions page xiii xix xx xxi xxv Part I GNSS: orbits, signals, and methods 1 GNSS ground
Table of Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions page xiii xix xx xxi xxv Part I GNSS: orbits, signals, and methods 1 GNSS ground
Zero difference GPS ambiguity resolution at CNES-CLS IGS Analysis Center
 Zero difference GPS ambiguity resolution at CNES-CLS IGS Analysis Center S. Loyer, F. Perosanz, F. Mercier, H. Capdeville, J.C. Marty, F. Fund, P. Gegout 3, R. Biancale 08// G 0 ENSG, Marne-la-Vallée November
Zero difference GPS ambiguity resolution at CNES-CLS IGS Analysis Center S. Loyer, F. Perosanz, F. Mercier, H. Capdeville, J.C. Marty, F. Fund, P. Gegout 3, R. Biancale 08// G 0 ENSG, Marne-la-Vallée November
RTCM-SSR Strategy of Bias Treatment
 RTCM-SSR Strategy of Bias Treatment Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de Chair of RTCM-SSR WG www.rtcm.org RTCM-SC104 SSR Development working group established in 2007 3 message
RTCM-SSR Strategy of Bias Treatment Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de Chair of RTCM-SSR WG www.rtcm.org RTCM-SC104 SSR Development working group established in 2007 3 message
ABSTRACT: Three types of portable units with GNSS raw data recording capability are assessed to determine static and kinematic position accuracy
 ABSTRACT: Three types of portable units with GNSS raw data recording capability are assessed to determine static and kinematic position accuracy under various environments using alternatively their internal
ABSTRACT: Three types of portable units with GNSS raw data recording capability are assessed to determine static and kinematic position accuracy under various environments using alternatively their internal
Performance of Research-Based N-RTK Positioning System in ISKANDAR Malaysia
 1 International Symposium on GPS/GNSS October -8, 1. Performance of Research-Based N-RTK Positioning System in ISKANDAR Malaysia Shariff, N. S. M., Musa, T. A., Omar, K., Ses, S. and Abdullah, K. A. UTM-GNSS
1 International Symposium on GPS/GNSS October -8, 1. Performance of Research-Based N-RTK Positioning System in ISKANDAR Malaysia Shariff, N. S. M., Musa, T. A., Omar, K., Ses, S. and Abdullah, K. A. UTM-GNSS
Introduction to GNSS
 Introduction to GNSS Dimitrios Bolkas, Ph.D. Department of Surveying Engineering, Pennsylvania State University, Wilkes Barre Campus PSLS Surveyor s Conference January 21-24, 2018 Hershey, PA Global Navigation
Introduction to GNSS Dimitrios Bolkas, Ph.D. Department of Surveying Engineering, Pennsylvania State University, Wilkes Barre Campus PSLS Surveyor s Conference January 21-24, 2018 Hershey, PA Global Navigation
al T TD ) ime D Faamily Products The RTD Family of products offers a full suite of highprecision GPS sensor positioning and navigation solutions for:
 ime D Faamily Products The RTD Family of products offers a full suite of highprecision GPS sensor positioning and navigation solutions for:") Reeal ynnamics al T amics (R TD ) ime D RTD) Time Dy Faamily mily ooff P roducts Products The RTD Family of products offers a full suite of highprecision GPS sensor positioning and navigation solutions
Reeal ynnamics al T amics (R TD ) ime D RTD) Time Dy Faamily mily ooff P roducts Products The RTD Family of products offers a full suite of highprecision GPS sensor positioning and navigation solutions
Multi-GNSS real-time troposphere delay estimation
 Multi-GNSS real-time troposphere delay estimation Jaroslaw Bosy, Tomasz Hadas, Jak Kaplon, Kamil Kazmierski The 7th China Satellite Navigation Conference, May 18-20 Changsha China, Session S1: BDS/GNSS
Multi-GNSS real-time troposphere delay estimation Jaroslaw Bosy, Tomasz Hadas, Jak Kaplon, Kamil Kazmierski The 7th China Satellite Navigation Conference, May 18-20 Changsha China, Session S1: BDS/GNSS
Ionospheric Corrections for GNSS
 Ionospheric Corrections for GNSS The Atmosphere and its Effect on GNSS Systems 14 to 16 April 2008 Santiago, Chile Ing. Roland Lejeune Overview Ionospheric delay corrections Core constellations GPS GALILEO
Ionospheric Corrections for GNSS The Atmosphere and its Effect on GNSS Systems 14 to 16 April 2008 Santiago, Chile Ing. Roland Lejeune Overview Ionospheric delay corrections Core constellations GPS GALILEO
PRINCIPLES AND FUNCTIONING OF GPS/ DGPS /ETS ER A. K. ATABUDHI, ORSAC
 PRINCIPLES AND FUNCTIONING OF GPS/ DGPS /ETS ER A. K. ATABUDHI, ORSAC GPS GPS, which stands for Global Positioning System, is the only system today able to show you your exact position on the Earth anytime,
PRINCIPLES AND FUNCTIONING OF GPS/ DGPS /ETS ER A. K. ATABUDHI, ORSAC GPS GPS, which stands for Global Positioning System, is the only system today able to show you your exact position on the Earth anytime,
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey
 Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey 2 Improving Hydrographic PPP by Height Constraining Ashraf Abdallah (Egypt) Volker Schwieger, (Germany) ashraf.abdallah@aswu.edu.eg
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey 2 Improving Hydrographic PPP by Height Constraining Ashraf Abdallah (Egypt) Volker Schwieger, (Germany) ashraf.abdallah@aswu.edu.eg
A Novel Device for Autonomous Real-Time Precise Positioning with Global Coverage
 A Novel Device for Autonomous Real-Time Precise Positioning with Global Coverage D. Calle, P. Navarro, A. Mozo, R. Píriz, D. Rodríguez, G. Tobías. GMV, Spain BIOGRAPHY David Calle has a Master of Science
A Novel Device for Autonomous Real-Time Precise Positioning with Global Coverage D. Calle, P. Navarro, A. Mozo, R. Píriz, D. Rodríguez, G. Tobías. GMV, Spain BIOGRAPHY David Calle has a Master of Science
Presentation Plan. The Test of Processing Modules of Global Positioning System (GPS) Softwares by Using Products of International GPS Service (IGS)
 Softwares by Using Products of International GPS Service (IGS)") The Test of Processing Modules of Global Positioning System (GPS) Softwares by Using Products of International GPS Service (IGS) Presentation Plan 1. Introduction 2. Application 3. Conclusions Ismail SANLIOGLU,
The Test of Processing Modules of Global Positioning System (GPS) Softwares by Using Products of International GPS Service (IGS) Presentation Plan 1. Introduction 2. Application 3. Conclusions Ismail SANLIOGLU,
Latest Developments in Network RTK Modeling to Support GNSS Modernization
 Journal of Global Positioning Systems (2007) Vol.6, No.1: 47-55 Latest Developments in Network RTK Modeling to Support GNSS Modernization Herbert Landau, Xiaoming Chen, Adrian Kipka, Ulrich Vollath Trimble
Journal of Global Positioning Systems (2007) Vol.6, No.1: 47-55 Latest Developments in Network RTK Modeling to Support GNSS Modernization Herbert Landau, Xiaoming Chen, Adrian Kipka, Ulrich Vollath Trimble
Developments of GNSS Buoy for a Synthetic Geohazards Monitoring System
 ICG12 in Kyoto (1 Dec., 2017) Developments of GNSS Buoy for a Synthetic Geohazards Monitoring System Teruyuki Kato, Earthq. Res. Inst., Univ. Tokyo, Japan Yukihiro Terada, Nat. Inst. Tech., Kochi Col.,
ICG12 in Kyoto (1 Dec., 2017) Developments of GNSS Buoy for a Synthetic Geohazards Monitoring System Teruyuki Kato, Earthq. Res. Inst., Univ. Tokyo, Japan Yukihiro Terada, Nat. Inst. Tech., Kochi Col.,
EFFECTS OF IONOSPHERIC SMALL-SCALE STRUCTURES ON GNSS
 EFFECTS OF IONOSPHERIC SMALL-SCALE STRUCTURES ON GNSS G. Wautelet, S. Lejeune, R. Warnant Royal Meteorological Institute of Belgium, Avenue Circulaire 3 B-8 Brussels (Belgium) e-mail: gilles.wautelet@oma.be
EFFECTS OF IONOSPHERIC SMALL-SCALE STRUCTURES ON GNSS G. Wautelet, S. Lejeune, R. Warnant Royal Meteorological Institute of Belgium, Avenue Circulaire 3 B-8 Brussels (Belgium) e-mail: gilles.wautelet@oma.be
1x10-16 frequency transfer by GPS IPPP. G. Petit Bureau International des Poids et Mesures
 1x10-16 frequency transfer by GPS IPPP G. Petit Bureau International des Poids et Mesures This follows from past work by! CNES to develop basis of the technique D. Laurichesse & F. Mercier, Proc 20 th
1x10-16 frequency transfer by GPS IPPP G. Petit Bureau International des Poids et Mesures This follows from past work by! CNES to develop basis of the technique D. Laurichesse & F. Mercier, Proc 20 th
Real-time RTK messages for permanent reference station applications standardized by RTCM. Dr.-Ing. Hans-Juergen Euler Leica Research Fellow
 Real-time RTK messages for permanent reference station applications standardized by RTCM Dr.-Ing. Hans-Juergen Euler Leica Research Fellow Permanent Station Arrays Arrays with Permanent Stations are established
Real-time RTK messages for permanent reference station applications standardized by RTCM Dr.-Ing. Hans-Juergen Euler Leica Research Fellow Permanent Station Arrays Arrays with Permanent Stations are established
The Benefit of Triple Frequency on Cycle Slip Detection
 Presented at the FIG Congress 2018, The Benefit of Triple Frequency on Cycle Slip Detection May 6-11, 2018 in Istanbul, Turkey Dong Sheng Zhao 1, Craig Hancock 1, Gethin Roberts 2, Lawrence Lau 1 1 The
Presented at the FIG Congress 2018, The Benefit of Triple Frequency on Cycle Slip Detection May 6-11, 2018 in Istanbul, Turkey Dong Sheng Zhao 1, Craig Hancock 1, Gethin Roberts 2, Lawrence Lau 1 1 The
Geo++'s Experiments on Android GNSS Raw Data
 Geo++'s Experiments on Android GNSS Raw Data Temmo Wübbena, Francesco Darugna, Akira Ito, Jannes Wübbena Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Outline SSRPOST concept Android Applications Absolute
Geo++'s Experiments on Android GNSS Raw Data Temmo Wübbena, Francesco Darugna, Akira Ito, Jannes Wübbena Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Outline SSRPOST concept Android Applications Absolute