GNSS OBSERVABLES. João F. Galera Monico - UNESP Tuesday 12 Sep
|
|
|
- Deborah Pitts
- 5 years ago
- Views:
Transcription

1

2 GNSS OBSERVABLES João F. Galera Monico - UNESP Tuesday Sep
3 Basic references
4 Basic GNSS Observation Equations Pseudorange Carrier Phase Doppler SNR Signal to Noise Ratio
5 Pseudorange Observation Equation (P)


6 P r k i = ρ r k + c dt r dt s + T k k s r + I r i + M Pi + b r,pi b Pi + e i
7 Carrier-Phase Observation Equation (L)
8
")
9 DCB Differential Code Bias (code) / UPD (uncalibrated phase delays)
10 Doppler Observation Equation (D) Doppler shift caused by the relative motion of receiver and satellite. Additionally, the receiver s or satellite s clocks may be affected by a frequency offset or drift Only the geometric Doppler effect was considered. Atmospheric propagation delay, clock frequency deviations, and relativistic effects were neglected e is the unit line of-sight vector from the user to the GNSS satellite We assume that vr << c and v s << c, Deviation due to relativistic effects Satellite frequency deviation from standard Receiver frequency deviation from standard
11 Covariance Matrix of the observations Together with the observation equation, a covariance matrix (CM) of the observations has to be available. In general, no correlations are assumed among the original observables (diagonal matrix). Carrier phase is normally order of magnitude better than Pseudorange.
12 CM of the observations It is usual to taking into account the satellite elevation angle, CNo, or others to built the CM. Considering Pseudoranges and two carrier phases at f i, and precision as function of the elevation angle The CM may be given as: CM i s pd... s pd s L... s L s s L pd pd L *f(elev) pd L *f(elev) * const const for example
13 CM of the observations L L pd pd i s s s s CM example for const const s s L pd pd pd L L * *f(elev) *f(elev) /sin(ele) f(elev) cos(ele) f(elev) Two examples
14 An example of an RINEX file
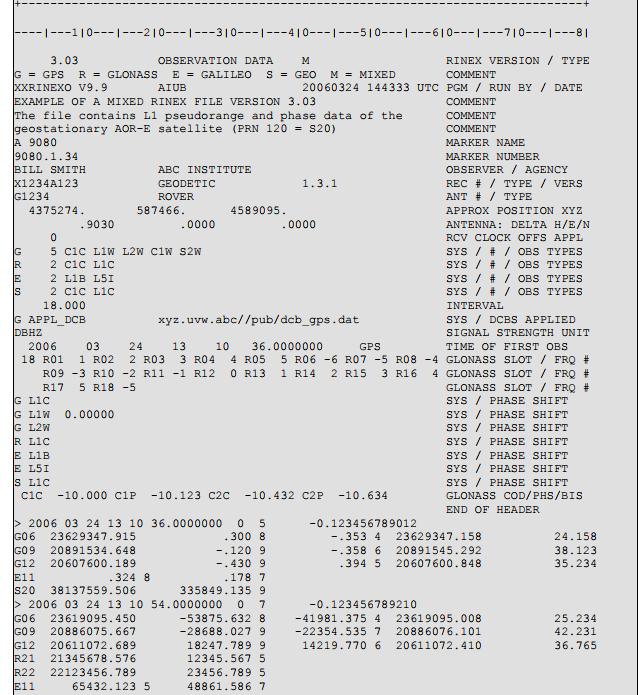
15
16 Combination of observations Several combinations between the GNSS observables are available. to minimize or better estimate specific quantities. GNSS processing using two or more frequencies is usually accomplished by using combined observables taking advantage of each combination/characteristics.
17 Combination of observations Combination among observation of different GNSS system
18 Combination of observations Combination of single satellite and receiver (only code, only carrier or both) Combination of Multisatellite and Multireceiver (only code, only carrier or both)
19 Combination of single satellite Applications and receiver Carrier-phase ambiguity resolution Isolation or elimination of ionospheric errors Multipath analysis
20 Wide and Narrow Lane Combinations. In the wide-lane combinations, the combined wavelength is larger than the largest individual wavelength in the combination.. In the intermediate-lane combinations, the combined wavelength lies between the largest and the shortest individual wavelength. 3. The narrow-lane combinations have a shorter wavelength than the individual signal with the shortest wavelength in the combination.
21 Wide Lane
22 Wide Lane The large wavelength of the Wide-lane combination (~86 cm) is useful for ambiguity resolution algorithms, as well as cycle-slip and outliers detection. But it is important to emphasize that noises present in the original observables are also amplified.
23 Narrow Lane
24 Narrow Lane The NL combinations have lower noise than the original observables used to generate them. The narrow wavelength (~,4) turns ambiguity resolution harder in comparison to other combination.
25
26
27 Ionospheric-free linear combination One of the most important combinations commonly referred as iono-free. This combination considerably removes the first order ionospheric effect, up-to 99.9%, which is frequency dependent. The remaining.% of ionospheric refraction affecting the measurements corresponds to only a few centimeters or even less (MARQUES, MONICO AND AQUINO () GPS Solution 5-3).
28 Ionospheric-free linear combination Dual Frequency f / ( f f ) f f / ( f f )
29 Ionospheric-free linear combination Dual Frequency GNSS positioning using code and phase ionospheric free observables the so-called Timing Group Delays (TGDs) are also cancelled in the combination. The satellite clocks errors (by definition) refer to the ionospheric free combination (Laurichesse, 8; Sanz Subirana et al., 3).
30 Ionospheric-free linear combination Single Frequency GRAPHIC: (GRoup and PHase Ionospheric Calibration) GRAPHIC only requires pseudorange and carrier-phase observations on one frequency. So, it is even suitable for use with inexpensive single-frequency receivers. L N GRAP GRAP N ( P i i / s Li ) c( dr dt ) T i NGRAP W is the (float valued) GRAPHIC ambiguity e GRAP
31 Ionospheric-free linear combination Single Frequency The DCBs need also be considered when combining the GRAPHIC observations with (single-frequency) pseudoranges to enable estimation of both the receiver clock offset and the GRAPHIC ambiguities. Depending of the requirements, tropospheric delays in may be considered.

32 Except for very short data arcs that do not enable proper estimation of the ambiguities, the GRAPHIC based PPP solution usually offers better positioning results than single-frequency pseudorange processing with a priori corrections from global ionosphere maps.
33 Geometry-free linear combination This combination allows to estimate or remove geometry, including clocks and all non-dispersive effects in the signal. It contains ionospheric delays and all kind of bias that are frequency-dependents (hardware biases, cycle slips, and ambiguities). ' c[ dt dt ] r s T denotes the non-dispersive signal travel distance s r
34 Geometry-free linear combination dm I ) f f ( ρ P dm I ρ P δm N λ I ) f f -( ρ L δm N λ -I ρ L ' ' ' ' is contamineted by receiver and satellite biases are contamineted by multipath dm and i I δm i
35 Geometry-free linear combination ' ) ( ) ( N N I f f f f PD PD L L ' 4,9 5,9 3,9 4,9,546,546,546,546 PD PD L L N N I
36 Geometry-free linear combination ),,, ( diag b L 4,663 33,48 6,97 4,94,3 4,779 9,86 5,94 6,34 8,87 sim par / 6,53 ; / 5,8 ;,86 ;,978 ' N N I
37 Geometry-free linear combination It can also be written as: It removes geometry, including clocks, and all non-dispersive effects It contains ionospheric delays and all kind of bias that are frequencydependents (hardware biases, cycle slips, and ambiguities).

38 Geometry free (considering the biases) provide STEC It can be used for batch or recursive approach
39 Melbourne-Wübbena linear combination A very useful combination is the Melbourne-Wübbena (MW) combination, which is composed by phase and code measurements. (WL carrier and NL Pseudorange). L MW = f f f L f L f + f f P + f P = L W + P N The MW combination fulfills the conditions for geometry free and ionosphere-free combinations. MW combination yields a biased estimate of the wide-lane ambiguity
40 The NL and WL combinations introduced here have been confined to using signals from only two frequencies. However, narrow-lane, intermediate-lane, or wide-lane combinations can of course also be formed by using observations on three or more frequencies simultaneously. A variety of combinations with different characteristics with respect to noise amplification and suppression of ionospheric delays has been introduced in the literature


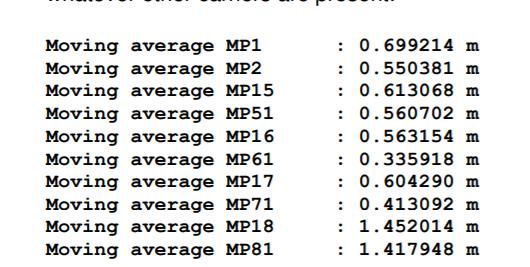
41 Multipath combination Multipath effects are mostly considered a nuisance in GNSS measurements and it is important to have an understanding of the magnitude of this error on the observations.
42
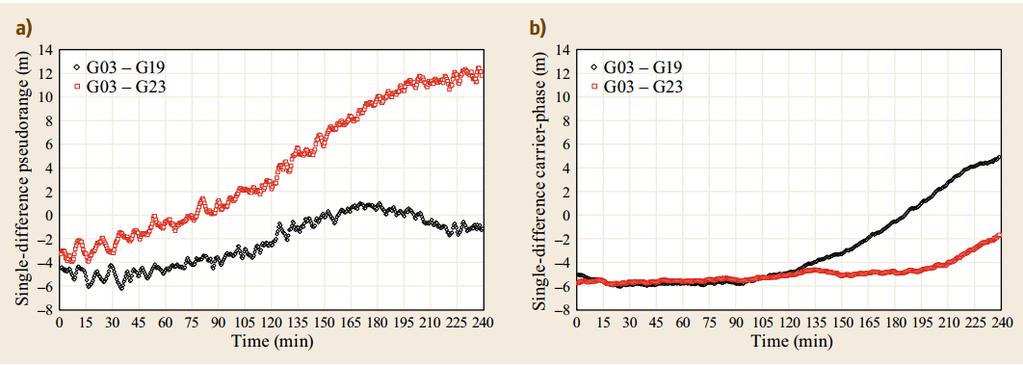
43 Combination of Multisatellite and Multireceiver All combinations presented so far, may be combined further with different receivers and satellites Between receivers single differences Between satellites single differences Double difference. Triple difference.
44 Between receivers single differences Assuming time-synchronized measurements of the same satellite k from two receivers and P k, # P k # P k # # means that we can apply such equation for any of the previous combination presented Like Iono free, WL, NL or others.
45 The satellite clock offset, which is identical for two timesynchronized observations at different receivers irrespective of the antenna distance, has dropped out. The tropospheric, ionospheric and group delay variations are still present in the equations, but strongly correlate with the distance of the two antennas. For close antennas, they reduce and can be disregarded. k k k k k k P,, cdt cd T I e k k k, cd k d rj d s j have been retained The reason for this is that only if receivers with identical correlators are used in the single difference, the combined satellite and receiver bias can be split up into the individual terms

46 Between receivers single differences k k k k k k k k k L,, cdt, c, T, I, ( N, w, ),
 ( ) ( The contribution of the system-time offset is contained in the differential satellite clock offset l k cd,")
47 Between satellites single differences l k l k l k l k l k l k l k e I T cd cdt P,,,,,,, l k k k l l l l k l k l k l k l k l k w N w N I T c cdt L,,,,,,, ) ( ) ( The contribution of the system-time offset is contained in the differential satellite clock offset l k cd,
48
 ( k,")
49 Double Difference (DD) DD can be formed with observations from a pair of receivers and and a pair of satellites k and l P cd T k, l k, l k, l k, l k, l,,,,, I e k, l, L k, l k, l k, l k, l k, l k, l k, l,, c, T, I, N, w, ) ( k, l,
50 P cd T k, l k, l k, l k, l k, l,,,,, I e k, l, The bias double differencesare present unless receivers with identical front-end characteristics and correlator settings are used L k, l k, l k, l k, l k, l k, l k, l,, c, T, I, N, w, ) ( k, l, The DD carrier-phase biasesare retained in the equations and will only drop out if receivers with compatible frontend and correlator design are used

51

52 Trimple Difference (TD) Forming SD and DD of observations eliminates some nuisance parameters, especially on short baselines where spatial correlation of signals delays can be exploited. Another method to eliminate errors is to take advantage of temporal correlation and make the differences at different epochs. All constant parameters will be eliminates.
53 Obtaining CM of the DD observables Epoch i l T i n n [ L, L,..., L, L, L,..., L ] l I i n being the variance of the considered observatio n (or combinatio n).
54 l [ I I ] l i SD n n i l I n SDi
55 l Cl DDi SD i For n satellites we have n- independent DDs and n(n-)/ possible DDs. C DD i C DDi
56 DD CM for n epochs ( stations) It will be a block diagonal matrix, since no correlations are assumed between epochs
57 DD CM for a network ( epoch) DD i T T [ ] [ CC ] Kronecker product For a network defined by the following baselines: -; -3, 3-4;...;(m-)-m, will be given by: For m baselines we have m- independent baselines and m(m-)/ possible baselines.
58 Exercise Consider 3 stations and 8 GPS satellites being tracked simultaneously from dual frequency receivers at these stations. How many Ion-free DDs are possible for form at each baseline and in the network (dependent and independent observations) for both carrier and pseudorange?
59 Back up slides
60
61
62
63

64
65
66
Bernese GPS Software 4.2
 Bernese GPS Software 4.2 Introduction Signal Processing Geodetic Use Details of modules Bernese GPS Software 4.2 Highest Accuracy GPS Surveys Research and Education Big Permanent GPS arrays Commercial
Bernese GPS Software 4.2 Introduction Signal Processing Geodetic Use Details of modules Bernese GPS Software 4.2 Highest Accuracy GPS Surveys Research and Education Big Permanent GPS arrays Commercial
Trimble Business Center:
 Trimble Business Center: Modernized Approaches for GNSS Baseline Processing Trimble s industry-leading software includes a new dedicated processor for static baselines. The software features dynamic selection
Trimble Business Center: Modernized Approaches for GNSS Baseline Processing Trimble s industry-leading software includes a new dedicated processor for static baselines. The software features dynamic selection
GNSS Technologies. PPP and RTK
 PPP and RTK 29.02.2016 Content Carrier phase based positioning PPP RTK VRS Slides based on: GNSS Applications and Methods, by S. Gleason and D. Gebre-Egziabher (Eds.), Artech House Inc., 2009 http://www.gnssapplications.org/
PPP and RTK 29.02.2016 Content Carrier phase based positioning PPP RTK VRS Slides based on: GNSS Applications and Methods, by S. Gleason and D. Gebre-Egziabher (Eds.), Artech House Inc., 2009 http://www.gnssapplications.org/
RTCM State Space Representation (SSR) Overall Concepts Towards PPP-RTK
 Overall Concepts Towards PPP-RTK") RTCM State Space Representation (SSR) Overall Concepts Towards PPP-RTK Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de Contents Terms and Abbreviations RTCM-SSR Working Group GNSS Error Sources
RTCM State Space Representation (SSR) Overall Concepts Towards PPP-RTK Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de Contents Terms and Abbreviations RTCM-SSR Working Group GNSS Error Sources
Positioning Techniques. João F. Galera Monico - UNESP Tuesday 12 Sep
 Positioning Techniques João F. Galera Monico - UNESP Tuesday 12 Sep Positioning methods Absolute Positioning Static and kinematic SPP and PPP Relative Positioning Static Static rapid Semi kinematic Kinematic
Positioning Techniques João F. Galera Monico - UNESP Tuesday 12 Sep Positioning methods Absolute Positioning Static and kinematic SPP and PPP Relative Positioning Static Static rapid Semi kinematic Kinematic
Integer Ambiguity Resolution for Precise Point Positioning Patrick Henkel
 Integer Ambiguity Resolution for Precise Point Positioning Patrick Henkel Overview Introduction Sequential Best-Integer Equivariant Estimation Multi-frequency code carrier linear combinations Galileo:
Integer Ambiguity Resolution for Precise Point Positioning Patrick Henkel Overview Introduction Sequential Best-Integer Equivariant Estimation Multi-frequency code carrier linear combinations Galileo:
UNIT 1 - introduction to GPS
 UNIT 1 - introduction to GPS 1. GPS SIGNAL Each GPS satellite transmit two signal for positioning purposes: L1 signal (carrier frequency of 1,575.42 MHz). Modulated onto the L1 carrier are two pseudorandom
UNIT 1 - introduction to GPS 1. GPS SIGNAL Each GPS satellite transmit two signal for positioning purposes: L1 signal (carrier frequency of 1,575.42 MHz). Modulated onto the L1 carrier are two pseudorandom
Posicionamento por ponto com. Posicionamento por satélite UNESP PP 2017 Prof. Galera
 Posicionamento por ponto com multiconstelação GNSS Posicionamento por satélite UNESP PP 2017 Prof. Galera Single-GNSS Observation Equations Considering j = 1; : : : ; f S the frequencies of a certain GNSS
Posicionamento por ponto com multiconstelação GNSS Posicionamento por satélite UNESP PP 2017 Prof. Galera Single-GNSS Observation Equations Considering j = 1; : : : ; f S the frequencies of a certain GNSS
Time Transfer with Integer PPP (IPPP) J. Delporte, F. Mercier, F. Perosanz (CNES) G. Petit (BIPM)
 J. Delporte, F. Mercier, F. Perosanz (CNES) G. Petit (BIPM)") Time Transfer with Integer PPP (IPPP) J. Delporte, F. Mercier, F. Perosanz (CNES) G. Petit (BIPM) Outline Time transfer GPS CP TT : advantages of integer ambiguity resolution GRG products Some results
Time Transfer with Integer PPP (IPPP) J. Delporte, F. Mercier, F. Perosanz (CNES) G. Petit (BIPM) Outline Time transfer GPS CP TT : advantages of integer ambiguity resolution GRG products Some results
Guochang Xu GPS. Theory, Algorithms and Applications. Second Edition. With 59 Figures. Sprin ger
 Guochang Xu GPS Theory, Algorithms and Applications Second Edition With 59 Figures Sprin ger Contents 1 Introduction 1 1.1 AKeyNoteofGPS 2 1.2 A Brief Message About GLONASS 3 1.3 Basic Information of Galileo
Guochang Xu GPS Theory, Algorithms and Applications Second Edition With 59 Figures Sprin ger Contents 1 Introduction 1 1.1 AKeyNoteofGPS 2 1.2 A Brief Message About GLONASS 3 1.3 Basic Information of Galileo
PPP with Ambiguity Resolution (AR) using RTCM-SSR
 using RTCM-SSR") PPP with Ambiguity Resolution (AR) using RTCM-SSR Gerhard Wübbena, Martin Schmitz, Andreas Bagge Geo++ GmbH 30827 Garbsen Germany www.geopp.de PPP with Ambiguity Resolution (AR) using RTCM-SSR Abstract
PPP with Ambiguity Resolution (AR) using RTCM-SSR Gerhard Wübbena, Martin Schmitz, Andreas Bagge Geo++ GmbH 30827 Garbsen Germany www.geopp.de PPP with Ambiguity Resolution (AR) using RTCM-SSR Abstract
Geodetic Reference via Precise Point Positioning - RTK
 2012 Geo++ GmbH Geodetic Reference via Precise Point Positioning - RTK Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de 2012 Geo++ GmbH Contents Terms and Abbreviations GNSS Principles GNSS
2012 Geo++ GmbH Geodetic Reference via Precise Point Positioning - RTK Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de 2012 Geo++ GmbH Contents Terms and Abbreviations GNSS Principles GNSS
Principles of the Global Positioning System Lecture 19
 12.540 Principles of the Global Positioning System Lecture 19 Prof. Thomas Herring http://geoweb.mit.edu/~tah/12.540 GPS Models and processing Summary: Finish up modeling aspects Rank deficiencies Processing
12.540 Principles of the Global Positioning System Lecture 19 Prof. Thomas Herring http://geoweb.mit.edu/~tah/12.540 GPS Models and processing Summary: Finish up modeling aspects Rank deficiencies Processing
The Benefit of Triple Frequency on Cycle Slip Detection
 Presented at the FIG Congress 2018, The Benefit of Triple Frequency on Cycle Slip Detection May 6-11, 2018 in Istanbul, Turkey Dong Sheng Zhao 1, Craig Hancock 1, Gethin Roberts 2, Lawrence Lau 1 1 The
Presented at the FIG Congress 2018, The Benefit of Triple Frequency on Cycle Slip Detection May 6-11, 2018 in Istanbul, Turkey Dong Sheng Zhao 1, Craig Hancock 1, Gethin Roberts 2, Lawrence Lau 1 1 The
Lecture 1 GNSS measurements and their combinations
 Lecture 1 GNSS measurements and their combinations Contact: jaume.sanz@upc.edu Web site: http://www.gage.upc.edu 1 Authorship statement The authorship of this material and the Intellectual Property Rights
Lecture 1 GNSS measurements and their combinations Contact: jaume.sanz@upc.edu Web site: http://www.gage.upc.edu 1 Authorship statement The authorship of this material and the Intellectual Property Rights
Multipath and Atmospheric Propagation Errors in Offshore Aviation DGPS Positioning
 Multipath and Atmospheric Propagation Errors in Offshore Aviation DGPS Positioning J. Paul Collins, Peter J. Stewart and Richard B. Langley 2nd Workshop on Offshore Aviation Research Centre for Cold Ocean
Multipath and Atmospheric Propagation Errors in Offshore Aviation DGPS Positioning J. Paul Collins, Peter J. Stewart and Richard B. Langley 2nd Workshop on Offshore Aviation Research Centre for Cold Ocean
Satellite Navigation Integrity and integer ambiguity resolution
 Satellite Navigation Integrity and integer ambiguity resolution Picture: ESA AE4E08 Sandra Verhagen Course 2010 2011, lecture 12 1 Today s topics Integrity and RAIM Integer Ambiguity Resolution Study Section
Satellite Navigation Integrity and integer ambiguity resolution Picture: ESA AE4E08 Sandra Verhagen Course 2010 2011, lecture 12 1 Today s topics Integrity and RAIM Integer Ambiguity Resolution Study Section
Fundamentals of GPS for high-precision geodesy
 Fundamentals of GPS for high-precision geodesy T. A. Herring M. A. Floyd R. W. King Massachusetts Institute of Technology, Cambridge, MA, USA UNAVCO Headquarters, Boulder, Colorado, USA 19 23 June 2017
Fundamentals of GPS for high-precision geodesy T. A. Herring M. A. Floyd R. W. King Massachusetts Institute of Technology, Cambridge, MA, USA UNAVCO Headquarters, Boulder, Colorado, USA 19 23 June 2017
Positioning with Single and Dual Frequency Smartphones Running Android 7 or Later
 Positioning with Single and Dual Frequency Smartphones Running Android 7 or Later * René Warnant, *Laura Van De Vyvere, + Quentin Warnant * University of Liege Geodesy and GNSS + Augmenteo, Plaine Image,
Positioning with Single and Dual Frequency Smartphones Running Android 7 or Later * René Warnant, *Laura Van De Vyvere, + Quentin Warnant * University of Liege Geodesy and GNSS + Augmenteo, Plaine Image,
Modelling GPS Observables for Time Transfer
 Modelling GPS Observables for Time Transfer Marek Ziebart Department of Geomatic Engineering University College London Presentation structure Overview of GPS Time frames in GPS Introduction to GPS observables
Modelling GPS Observables for Time Transfer Marek Ziebart Department of Geomatic Engineering University College London Presentation structure Overview of GPS Time frames in GPS Introduction to GPS observables
EFFECTS OF IONOSPHERIC SMALL-SCALE STRUCTURES ON GNSS
 EFFECTS OF IONOSPHERIC SMALL-SCALE STRUCTURES ON GNSS G. Wautelet, S. Lejeune, R. Warnant Royal Meteorological Institute of Belgium, Avenue Circulaire 3 B-8 Brussels (Belgium) e-mail: gilles.wautelet@oma.be
EFFECTS OF IONOSPHERIC SMALL-SCALE STRUCTURES ON GNSS G. Wautelet, S. Lejeune, R. Warnant Royal Meteorological Institute of Belgium, Avenue Circulaire 3 B-8 Brussels (Belgium) e-mail: gilles.wautelet@oma.be
Integer Ambiguity Resolution in Precise Point Positioning: Method Comparison and Real-Time Application
 Integer Ambiguity Resolution in Precise Point Positioning: Method Comparison and Real-Time Application Jianghui Geng 1,2, Norman Teferle 3, Denis Laurichesse 4, Furqan Ahmed 3, Xiaolin Meng 1, Alan Dodson
Integer Ambiguity Resolution in Precise Point Positioning: Method Comparison and Real-Time Application Jianghui Geng 1,2, Norman Teferle 3, Denis Laurichesse 4, Furqan Ahmed 3, Xiaolin Meng 1, Alan Dodson
Zero difference GPS ambiguity resolution at CNES-CLS IGS Analysis Center
 Zero difference GPS ambiguity resolution at CNES-CLS IGS Analysis Center S. Loyer, F. Perosanz, F. Mercier, H. Capdeville, J.C. Marty, F. Fund, P. Gegout 3, R. Biancale 08// G 0 ENSG, Marne-la-Vallée November
Zero difference GPS ambiguity resolution at CNES-CLS IGS Analysis Center S. Loyer, F. Perosanz, F. Mercier, H. Capdeville, J.C. Marty, F. Fund, P. Gegout 3, R. Biancale 08// G 0 ENSG, Marne-la-Vallée November
Real-time PPP with ambiguity resolution Determination and Application of Uncalibrated Phase Delays
 Real-time PPP with ambiguity resolution Determination and Application of Uncalibrated Phase Delays K. Huber*, F. Hinterberger**, R. Lesjak*, R. Weber**, *Graz University of Technology, Institute of Navigation,
Real-time PPP with ambiguity resolution Determination and Application of Uncalibrated Phase Delays K. Huber*, F. Hinterberger**, R. Lesjak*, R. Weber**, *Graz University of Technology, Institute of Navigation,
1x10-16 frequency transfer by GPS IPPP. G. Petit Bureau International des Poids et Mesures
 1x10-16 frequency transfer by GPS IPPP G. Petit Bureau International des Poids et Mesures This follows from past work by! CNES to develop basis of the technique D. Laurichesse & F. Mercier, Proc 20 th
1x10-16 frequency transfer by GPS IPPP G. Petit Bureau International des Poids et Mesures This follows from past work by! CNES to develop basis of the technique D. Laurichesse & F. Mercier, Proc 20 th
Study and analysis of Differential GNSS and Precise Point Positioning
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 9, Issue 2 Ver. I (Mar Apr. 2014), PP 53-59 Study and analysis of Differential GNSS and Precise
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 9, Issue 2 Ver. I (Mar Apr. 2014), PP 53-59 Study and analysis of Differential GNSS and Precise
GNSS Technologies. PPP and RTK
 PPP and RTK 22.03.2017 Content Carrier phase based positioning PPP RTK VRS Slides based on: GNSS Applications and Methods, by S. Gleason and D. Gebre-Egziabher (Eds.), Artech House Inc., 2009 http://www.gnssapplications.org/
PPP and RTK 22.03.2017 Content Carrier phase based positioning PPP RTK VRS Slides based on: GNSS Applications and Methods, by S. Gleason and D. Gebre-Egziabher (Eds.), Artech House Inc., 2009 http://www.gnssapplications.org/
Multisystem Real Time Precise-Point-Positioning, today with GPS+GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS
 2 International Symposium on /GNSS October 26-28, 2. Multisystem Real Time Precise-Point-Positioning, today with +GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS Álvaro Mozo García,
2 International Symposium on /GNSS October 26-28, 2. Multisystem Real Time Precise-Point-Positioning, today with +GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS Álvaro Mozo García,
Table of Contents. Frequently Used Abbreviation... xvii
 GPS Satellite Surveying, 2 nd Edition Alfred Leick Department of Surveying Engineering, University of Maine John Wiley & Sons, Inc. 1995 (Navtech order #1028) Table of Contents Preface... xiii Frequently
GPS Satellite Surveying, 2 nd Edition Alfred Leick Department of Surveying Engineering, University of Maine John Wiley & Sons, Inc. 1995 (Navtech order #1028) Table of Contents Preface... xiii Frequently
Introduction to DGNSS
 Introduction to DGNSS Jaume Sanz Subirana J. Miguel Juan Zornoza Research group of Astronomy & Geomatics (gage) Technical University of Catalunya (UPC), Spain. Web site: http://www.gage.upc.edu Hanoi,
Introduction to DGNSS Jaume Sanz Subirana J. Miguel Juan Zornoza Research group of Astronomy & Geomatics (gage) Technical University of Catalunya (UPC), Spain. Web site: http://www.gage.upc.edu Hanoi,
Analysis of GNSS Receiver Biases and Noise using Zero Baseline Techniques
 1 Analysis of GNSS Receiver Biases and Noise using Zero Baseline Techniques Ken MacLeod, Simon Banville, Reza Ghoddousi-Fard and Paul Collins Canadian Geodetic Survey, Natural Resources Canada Plenary
1 Analysis of GNSS Receiver Biases and Noise using Zero Baseline Techniques Ken MacLeod, Simon Banville, Reza Ghoddousi-Fard and Paul Collins Canadian Geodetic Survey, Natural Resources Canada Plenary
FieldGenius Technical Notes GPS Terminology
 FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
COMPARISON OF GPS COMMERCIAL SOFTWARE PACKAGES TO PROCESSING STATIC BASELINES UP TO 30 KM
 COMPARISON OF GPS COMMERCIAL SOFTWARE PACKAGES TO PROCESSING STATIC BASELINES UP TO 30 KM Khaled Mohamed Abdel Mageed Civil Engineering, Cairo, Egypt E-Mail: khaled_mgd@yahoo.com ABSTRACT The objective
COMPARISON OF GPS COMMERCIAL SOFTWARE PACKAGES TO PROCESSING STATIC BASELINES UP TO 30 KM Khaled Mohamed Abdel Mageed Civil Engineering, Cairo, Egypt E-Mail: khaled_mgd@yahoo.com ABSTRACT The objective
CONVERGENCE TIME IMPROVEMENT OF PRECISE POINT POSITIONING
 CONVERGENCE TIME IMPROVEMENT OF PRECISE POINT POSITIONING Mohamed Elsobeiey and Ahmed El-Rabbany Department of Civil Engineering (Geomatics Option) Ryerson University, CANADA Outline Introduction Impact
CONVERGENCE TIME IMPROVEMENT OF PRECISE POINT POSITIONING Mohamed Elsobeiey and Ahmed El-Rabbany Department of Civil Engineering (Geomatics Option) Ryerson University, CANADA Outline Introduction Impact
The Benefits of Three Frequencies for the High Accuracy Positioning
 The Benefits of Three Frequencies for the High Accuracy Positioning Nobuaki Kubo (Tokyo University of Marine and Science Technology) Akio Yasuda (Tokyo University of Marine and Science Technology) Isao
The Benefits of Three Frequencies for the High Accuracy Positioning Nobuaki Kubo (Tokyo University of Marine and Science Technology) Akio Yasuda (Tokyo University of Marine and Science Technology) Isao
THE INFLUENCE OF ZENITH TROPOSPHERIC DELAY ON PPP-RTK. S. Nistor a, *, A.S. Buda a,
 THE INFLUENCE OF ZENITH TROPOSPHERIC DELAY ON PPP-RTK S. Nistor a, *, A.S. Buda a, a University of Oradea, Faculty of Civil Engineering, Cadastre and Architecture, Department Cadastre-Architecture, Romania,
THE INFLUENCE OF ZENITH TROPOSPHERIC DELAY ON PPP-RTK S. Nistor a, *, A.S. Buda a, a University of Oradea, Faculty of Civil Engineering, Cadastre and Architecture, Department Cadastre-Architecture, Romania,
Latest PPP Efforts at UNB ( )
") Latest PPP Efforts at UNB (2007-2008) Simon Banville Rodrigo F. Leandro Hyunho Rho Richard B. Langley Marcelo C. Santos May 27 2008 GEOIDE Annual Conference Niagara Falls, ON, Canada Outline Impact of
Latest PPP Efforts at UNB (2007-2008) Simon Banville Rodrigo F. Leandro Hyunho Rho Richard B. Langley Marcelo C. Santos May 27 2008 GEOIDE Annual Conference Niagara Falls, ON, Canada Outline Impact of
Some of the proposed GALILEO and modernized GPS frequencies.
 On the selection of frequencies for long baseline GALILEO ambiguity resolution P.J.G. Teunissen, P. Joosten, C.D. de Jong Department of Mathematical Geodesy and Positioning, Delft University of Technology,
On the selection of frequencies for long baseline GALILEO ambiguity resolution P.J.G. Teunissen, P. Joosten, C.D. de Jong Department of Mathematical Geodesy and Positioning, Delft University of Technology,
RTCM-SSR Strategy of Bias Treatment
 RTCM-SSR Strategy of Bias Treatment Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de Chair of RTCM-SSR WG www.rtcm.org RTCM-SC104 SSR Development working group established in 2007 3 message
RTCM-SSR Strategy of Bias Treatment Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de Chair of RTCM-SSR WG www.rtcm.org RTCM-SC104 SSR Development working group established in 2007 3 message
Orion-S GPS Receiver Software Validation
 Space Flight Technology, German Space Operations Center (GSOC) Deutsches Zentrum für Luft- und Raumfahrt (DLR) e.v. O. Montenbruck Doc. No. : GTN-TST-11 Version : 1.1 Date : July 9, 23 Document Title:
Space Flight Technology, German Space Operations Center (GSOC) Deutsches Zentrum für Luft- und Raumfahrt (DLR) e.v. O. Montenbruck Doc. No. : GTN-TST-11 Version : 1.1 Date : July 9, 23 Document Title:
An Introduction to GPS
 An Introduction to GPS You are here The GPS system: what is GPS Principles of GPS: how does it work Processing of GPS: getting precise results Yellowstone deformation: an example What is GPS? System to
An Introduction to GPS You are here The GPS system: what is GPS Principles of GPS: how does it work Processing of GPS: getting precise results Yellowstone deformation: an example What is GPS? System to
UCGE Reports Number 20054
 UCGE Reports Number 20054 Department of Geomatics Engineering An Analysis of Some Critical Error Sources in Static GPS Surveying (URL: http://www.geomatics.ucalgary.ca/links/gradtheses.html) by Weigen
UCGE Reports Number 20054 Department of Geomatics Engineering An Analysis of Some Critical Error Sources in Static GPS Surveying (URL: http://www.geomatics.ucalgary.ca/links/gradtheses.html) by Weigen
Detection and Mitigation of Static Multipath in L1 Carrier Phase Measurements Using a Dual- Antenna Approach
 Detection and Mitigation of Static Multipath in L1 Carrier Phase Measurements Using a Dual- Antenna Approach M.C. Santos Department of Geodesy and Geomatics Engineering, University of New Brunswick, P.O.
Detection and Mitigation of Static Multipath in L1 Carrier Phase Measurements Using a Dual- Antenna Approach M.C. Santos Department of Geodesy and Geomatics Engineering, University of New Brunswick, P.O.
On the GNSS integer ambiguity success rate
 On the GNSS integer ambiguity success rate P.J.G. Teunissen Mathematical Geodesy and Positioning Faculty of Civil Engineering and Geosciences Introduction Global Navigation Satellite System (GNSS) ambiguity
On the GNSS integer ambiguity success rate P.J.G. Teunissen Mathematical Geodesy and Positioning Faculty of Civil Engineering and Geosciences Introduction Global Navigation Satellite System (GNSS) ambiguity
Effect of Differential Code Biases on the GPS CORS Network: A Case Study of Egyptian Permanent GPS Network (EPGN)
") Effect of Differential Code Biases on the GPS CORS Network: A Case Study of Egyptian Permanent GPS Network (EPGN) Mohammed A. Abid 1, 2*, Ashraf Mousa 3, Mostafa Rabah 4, Mahmoud El mewafi 1, and Ahmed
Effect of Differential Code Biases on the GPS CORS Network: A Case Study of Egyptian Permanent GPS Network (EPGN) Mohammed A. Abid 1, 2*, Ashraf Mousa 3, Mostafa Rabah 4, Mahmoud El mewafi 1, and Ahmed
Assessment of the Accuracy of Processing GPS Static Baselines Up To 40 Km Using Single and Dual Frequency GPS Receivers.
 International OPEN ACCESS Journal Of Modern Engineering Research (IJMER) Assessment of the Accuracy of Processing GPS Static Baselines Up To 40 Km Using Single and Dual Frequency GPS Receivers. Khaled
International OPEN ACCESS Journal Of Modern Engineering Research (IJMER) Assessment of the Accuracy of Processing GPS Static Baselines Up To 40 Km Using Single and Dual Frequency GPS Receivers. Khaled
GPS and Recent Alternatives for Localisation. Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney
 GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
AN ALGORITHM FOR NETWORK REAL TIME KINEMATIC PROCESSING
 AN ALGORITHM FOR NETWORK REAL TIME KINEMATIC PROCESSING A. Malekzadeh*, J. Asgari, A. R. Amiri-Simkooei Dept. Geomatics, Faculty of Engineering, University of Isfahan, Isfahan, Iran - (Ardalan.Malekzadeh,
AN ALGORITHM FOR NETWORK REAL TIME KINEMATIC PROCESSING A. Malekzadeh*, J. Asgari, A. R. Amiri-Simkooei Dept. Geomatics, Faculty of Engineering, University of Isfahan, Isfahan, Iran - (Ardalan.Malekzadeh,
Global Navigation Satellite Systems II
 Global Navigation Satellite Systems II AERO4701 Space Engineering 3 Week 4 Last Week Examined the problem of satellite coverage and constellation design Looked at the GPS satellite constellation Overview
Global Navigation Satellite Systems II AERO4701 Space Engineering 3 Week 4 Last Week Examined the problem of satellite coverage and constellation design Looked at the GPS satellite constellation Overview
Scientific Journal of Silesian University of Technology. Series Transport Zeszyty Naukowe Politechniki Śląskiej. Seria Transport
 Scientific Journal of Silesian University of Technology. Series Transport Zeszyty Naukowe Politechniki Śląskiej. Seria Transport Volume 89 2015 p-issn: 0209-3324 e-issn: 2450-1549 DOI: Journal homepage:
Scientific Journal of Silesian University of Technology. Series Transport Zeszyty Naukowe Politechniki Śląskiej. Seria Transport Volume 89 2015 p-issn: 0209-3324 e-issn: 2450-1549 DOI: Journal homepage:
GPS for crustal deformation studies. May 7, 2009
 GPS for crustal deformation studies May 7, 2009 High precision GPS for Geodesy Use precise orbit products (e.g., IGS or JPL) Use specialized modeling software GAMIT/GLOBK GIPSY OASIS BERNESE These software
GPS for crustal deformation studies May 7, 2009 High precision GPS for Geodesy Use precise orbit products (e.g., IGS or JPL) Use specialized modeling software GAMIT/GLOBK GIPSY OASIS BERNESE These software
Assessing & Mitigation of risks on railways operational scenarios
 R H I N O S Railway High Integrity Navigation Overlay System Assessing & Mitigation of risks on railways operational scenarios Rome, June 22 nd 2017 Anja Grosch, Ilaria Martini, Omar Garcia Crespillo (DLR)
R H I N O S Railway High Integrity Navigation Overlay System Assessing & Mitigation of risks on railways operational scenarios Rome, June 22 nd 2017 Anja Grosch, Ilaria Martini, Omar Garcia Crespillo (DLR)
Global Positioning System: what it is and how we use it for measuring the earth s movement. May 5, 2009
 Global Positioning System: what it is and how we use it for measuring the earth s movement. May 5, 2009 References Lectures from K. Larson s Introduction to GNSS http://www.colorado.edu/engineering/asen/
Global Positioning System: what it is and how we use it for measuring the earth s movement. May 5, 2009 References Lectures from K. Larson s Introduction to GNSS http://www.colorado.edu/engineering/asen/
Optimization of Cascade Integer Resolution with Three Civil GPS Frequencies
 Optimization of Cascade Integer Resolution with Three Civil GPS Frequencies Jaewoo Jung, Per Enge, Stanford University Boris Pervan, Illinois Institute of Technology BIOGRAPHY Dr. Jaewoo Jung received
Optimization of Cascade Integer Resolution with Three Civil GPS Frequencies Jaewoo Jung, Per Enge, Stanford University Boris Pervan, Illinois Institute of Technology BIOGRAPHY Dr. Jaewoo Jung received
Kalman Filter Based Integer Ambiguity. Ionosphere and Troposphere Estimation
 ION GNSS 2010 Kalman Filter Based Integer Ambiguity Resolution Strategy t for Long Baseline RTK with Ionosphere and Troposphere Estimation Tokyo University of Marine Science and Technology Tomoji jitakasu
ION GNSS 2010 Kalman Filter Based Integer Ambiguity Resolution Strategy t for Long Baseline RTK with Ionosphere and Troposphere Estimation Tokyo University of Marine Science and Technology Tomoji jitakasu
ABSOLUTE CALIBRATION OF TIME RECEIVERS WITH DLR'S GPS/GALILEO HW SIMULATOR
 ABSOLUTE CALIBRATION OF TIME RECEIVERS WITH DLR'S GPS/GALILEO HW SIMULATOR S. Thölert, U. Grunert, H. Denks, and J. Furthner German Aerospace Centre (DLR), Institute of Communications and Navigation, Oberpfaffenhofen,
ABSOLUTE CALIBRATION OF TIME RECEIVERS WITH DLR'S GPS/GALILEO HW SIMULATOR S. Thölert, U. Grunert, H. Denks, and J. Furthner German Aerospace Centre (DLR), Institute of Communications and Navigation, Oberpfaffenhofen,
ORBITS AND CLOCKS FOR GLONASS PPP
 ION GNSS 2009 ORBITS AND CLOCKS FOR GLONASS PPP SEPTEMBER 22-25, 2009 - SAVANNAH, GEORGIA SESSION E3: PPP AND NETWORK-BASED RTK 1 D. Calle A. Mozo P. Navarro R. Píriz D. Rodríguez G. Tobías September 24,
ION GNSS 2009 ORBITS AND CLOCKS FOR GLONASS PPP SEPTEMBER 22-25, 2009 - SAVANNAH, GEORGIA SESSION E3: PPP AND NETWORK-BASED RTK 1 D. Calle A. Mozo P. Navarro R. Píriz D. Rodríguez G. Tobías September 24,
TREATMENT OF DIFFRACTION EFFECTS CAUSED BY MOUNTAIN RIDGES
 TREATMENT OF DIFFRACTION EFFECTS CAUSED BY MOUNTAIN RIDGES Rainer Klostius, Andreas Wieser, Fritz K. Brunner Institute of Engineering Geodesy and Measurement Systems, Graz University of Technology, Steyrergasse
TREATMENT OF DIFFRACTION EFFECTS CAUSED BY MOUNTAIN RIDGES Rainer Klostius, Andreas Wieser, Fritz K. Brunner Institute of Engineering Geodesy and Measurement Systems, Graz University of Technology, Steyrergasse
DECIMETER LEVEL MAPPING USING DIFFERENTIAL PHASE MEASUREMENTS OF GPS HANDHELD RECEIVERS
 DECIMETER LEVEL MAPPING USING DIFFERENTIAL PHASE MEASUREMENTS OF GPS HANDHELD RECEIVERS Dr. Ahmed El-Mowafy Civil and Environmental Engineering Department College of Engineering The United Arab Emirates
DECIMETER LEVEL MAPPING USING DIFFERENTIAL PHASE MEASUREMENTS OF GPS HANDHELD RECEIVERS Dr. Ahmed El-Mowafy Civil and Environmental Engineering Department College of Engineering The United Arab Emirates
Performances of Modernized GPS and Galileo in Relative Positioning with weighted ionosphere Delays
 Agence Spatiale Algérienne Centre des Techniques Spatiales Agence Spatiale Algérienne Centre des Techniques Spatiales الوكالة الفضائية الجزائرية مركز للتقنيات الفضائية Performances of Modernized GPS and
Agence Spatiale Algérienne Centre des Techniques Spatiales Agence Spatiale Algérienne Centre des Techniques Spatiales الوكالة الفضائية الجزائرية مركز للتقنيات الفضائية Performances of Modernized GPS and
Bernhard Hofnlann-Wellenhof Herbert Lichtenegger Elmar Wasle. GNSS - Global Navigation Satellite Systenls. GPS, GLONASS, Galileo, and nl0re
 Bernhard Hofnlann-Wellenhof Herbert Lichtenegger Elmar Wasle GNSS - Global Navigation Satellite Systenls GPS, GLONASS, Galileo, and nl0re SpringerWienNewYork Contents Abbreviations xxi 1 Introduction 1
Bernhard Hofnlann-Wellenhof Herbert Lichtenegger Elmar Wasle GNSS - Global Navigation Satellite Systenls GPS, GLONASS, Galileo, and nl0re SpringerWienNewYork Contents Abbreviations xxi 1 Introduction 1
Ionospheric Data Processing and Analysis
 Ionospheric Data Processing and Analysis Dr. Charles Carrano 1 Dr. Keith Groves 2 1 Boston College, Institute for Scientific Research 2 Air Force Research Laboratory, Space Vehicles Directorate Workshop
Ionospheric Data Processing and Analysis Dr. Charles Carrano 1 Dr. Keith Groves 2 1 Boston College, Institute for Scientific Research 2 Air Force Research Laboratory, Space Vehicles Directorate Workshop
Tajul Ariffin Musa. Tajul A. Musa. Dept. of Geomatics Eng, FKSG, Universiti Teknologi Malaysia, Skudai, Johor, MALAYSIA.
 Tajul Ariffin Musa Dept. of Geomatics Eng, FKSG, Universiti Teknologi Malaysia, 81310 Skudai, Johor, MALAYSIA. Phone : +6075530830;+6075530883; Mobile : +60177294601 Fax : +6075566163 E-mail : tajul@fksg.utm.my
Tajul Ariffin Musa Dept. of Geomatics Eng, FKSG, Universiti Teknologi Malaysia, 81310 Skudai, Johor, MALAYSIA. Phone : +6075530830;+6075530883; Mobile : +60177294601 Fax : +6075566163 E-mail : tajul@fksg.utm.my
Multi-GNSS / Multi-Signal code bias determination from raw GNSS observations
 Multi-GNSS / Multi-Signal code bias determination from raw GNSS observations F. Reckeweg, E. Schönemann, T. Springer, M. Becker, W. Enderle Geodätische Woche 2016 InterGEO 11.-13. October 2016 Hamburg,
Multi-GNSS / Multi-Signal code bias determination from raw GNSS observations F. Reckeweg, E. Schönemann, T. Springer, M. Becker, W. Enderle Geodätische Woche 2016 InterGEO 11.-13. October 2016 Hamburg,
Vector tracking loops are a type
 GNSS Solutions: What are vector tracking loops, and what are their benefits and drawbacks? GNSS Solutions is a regular column featuring questions and answers about technical aspects of GNSS. Readers are
GNSS Solutions: What are vector tracking loops, and what are their benefits and drawbacks? GNSS Solutions is a regular column featuring questions and answers about technical aspects of GNSS. Readers are
CHAPTER 2 GPS GEODESY. Estelar. The science of geodesy is concerned with the earth by quantitatively
 CHAPTER 2 GPS GEODESY 2.1. INTRODUCTION The science of geodesy is concerned with the earth by quantitatively describing the coordinates of each point on the surface in a global or local coordinate system.
CHAPTER 2 GPS GEODESY 2.1. INTRODUCTION The science of geodesy is concerned with the earth by quantitatively describing the coordinates of each point on the surface in a global or local coordinate system.
Performance Evaluation of Multiple Reference Station GPS RTK for a Medium Scale Network
 Journal of Global Positioning Systems (2004) Vol. 3, No. 12: 173182 Performance Evaluation of Multiple Reference Station GPS RTK for a Medium Scale Network T.H. Diep Dao, Paul Alves and Gérard Lachapelle
Journal of Global Positioning Systems (2004) Vol. 3, No. 12: 173182 Performance Evaluation of Multiple Reference Station GPS RTK for a Medium Scale Network T.H. Diep Dao, Paul Alves and Gérard Lachapelle
Global Correction Services for GNSS
 Global Correction Services for GNSS Hemisphere GNSS Whitepaper September 5, 2015 Overview Since the early days of GPS, new industries emerged while existing industries evolved to use position data in real-time.
Global Correction Services for GNSS Hemisphere GNSS Whitepaper September 5, 2015 Overview Since the early days of GPS, new industries emerged while existing industries evolved to use position data in real-time.
GALILEO COMMON VIEW: FORMAT, PROCESSING, AND TESTS WITH GIOVE
 GALILEO COMMON VIEW: FORMAT, PROCESSING, AND TESTS WITH GIOVE Pascale Defraigne Royal Observatory of Belgium (ROB) Avenue Circulaire, 3, B-1180 Brussels, Belgium e-mail: p.defraigne@oma.be M. C. Martínez-Belda
GALILEO COMMON VIEW: FORMAT, PROCESSING, AND TESTS WITH GIOVE Pascale Defraigne Royal Observatory of Belgium (ROB) Avenue Circulaire, 3, B-1180 Brussels, Belgium e-mail: p.defraigne@oma.be M. C. Martínez-Belda
FAST PRECISE GPS POSITIONING IN THE PRESENCE OF IONOSPHERIC DELAYS
 FAST PRECISE GPS POSITIONING IN THE PRESENCE OF IONOSPHERIC DELAYS Proefschrift ter verkrijging van de graad van doctor aan de Technische Universiteit Delft, op gezag van de Rector Magnificus prof.dr.ir.
FAST PRECISE GPS POSITIONING IN THE PRESENCE OF IONOSPHERIC DELAYS Proefschrift ter verkrijging van de graad van doctor aan de Technische Universiteit Delft, op gezag van de Rector Magnificus prof.dr.ir.
Research Article Instantaneous Triple-Frequency GPS Cycle-Slip Detection and Repair
 International Journal of Navigation and Observation Volume 29, Article ID 47231, 15 pages doi:1.1155/29/47231 Research Article Instantaneous Triple-Frequency GPS Cycle-Slip Detection and Repair Zhen Dai,
International Journal of Navigation and Observation Volume 29, Article ID 47231, 15 pages doi:1.1155/29/47231 Research Article Instantaneous Triple-Frequency GPS Cycle-Slip Detection and Repair Zhen Dai,
Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions
 Table of Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions page xiii xix xx xxi xxv Part I GNSS: orbits, signals, and methods 1 GNSS ground
Table of Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions page xiii xix xx xxi xxv Part I GNSS: orbits, signals, and methods 1 GNSS ground
PRECISE POINT POSITIONING USING COMBDINE GPS/GLONASS MEASUREMENTS
 PRECISE POINT POSITIONING USING COMBDINE GPS/GLONASS MEASUREMENTS Mohamed AZAB, Ahmed EL-RABBANY Ryerson University, Canada M. Nabil SHOUKRY, Ramadan KHALIL Alexandria University, Egypt Outline Introduction.
PRECISE POINT POSITIONING USING COMBDINE GPS/GLONASS MEASUREMENTS Mohamed AZAB, Ahmed EL-RABBANY Ryerson University, Canada M. Nabil SHOUKRY, Ramadan KHALIL Alexandria University, Egypt Outline Introduction.
Introduction to GNSS Base-Station
 Introduction to GNSS Base-Station Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 Introduction GPS or GNSS observation
Introduction to GNSS Base-Station Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 Introduction GPS or GNSS observation
Convergence Time Improvement of Precise Point Positioning
 , Canada Key words: GPS, Precise Point Positioning, satellite orbit, clock corrections, ionosphere SUMMARY Presently, precise point positioning (PPP) requires about 30 minutes or more to achieve centimetreto
, Canada Key words: GPS, Precise Point Positioning, satellite orbit, clock corrections, ionosphere SUMMARY Presently, precise point positioning (PPP) requires about 30 minutes or more to achieve centimetreto
Sidereal Filtering Based on GPS Single Differences for Mitigating Multipath Effects
 International Global Navigation Satellite Systems Society IGNSS Symposium 2007 The University of New South Wales, Sydney, ustralia 4 6 December, 2007 Sidereal Filtering Based on GPS Single Differences
International Global Navigation Satellite Systems Society IGNSS Symposium 2007 The University of New South Wales, Sydney, ustralia 4 6 December, 2007 Sidereal Filtering Based on GPS Single Differences
Research Article Triple-Frequency GPS Precise Point Positioning Ambiguity Resolution Using Dual-Frequency Based IGS Precise Clock Products
 Hindawi International Journal of Aerospace Engineering Volume 217, Article ID 7854323, 11 pages https://doi.org/1.1155/217/7854323 Research Article Triple-Frequency GPS Precise Point Positioning Ambiguity
Hindawi International Journal of Aerospace Engineering Volume 217, Article ID 7854323, 11 pages https://doi.org/1.1155/217/7854323 Research Article Triple-Frequency GPS Precise Point Positioning Ambiguity
Attitude Determination by Means of Dual Frequency GPS Receivers
 Attitude Determination by Means of Dual Frequency GPS Receivers Vadim Rokhlin and Gilad Even Tzur Department of Mapping and Geo Information Engineering Faculty of Civil and Environmental Engineering Technion
Attitude Determination by Means of Dual Frequency GPS Receivers Vadim Rokhlin and Gilad Even Tzur Department of Mapping and Geo Information Engineering Faculty of Civil and Environmental Engineering Technion
E. Calais Purdue University - EAS Department Civil 3273
 E. Calais Purdue University - EAS Department Civil 373 ecalais@purdue.edu GPS signal propagation GPS signal (= carrier phase modulated by satellite PRN code) sent by satellite. About 66 msec (0,000 km)
E. Calais Purdue University - EAS Department Civil 373 ecalais@purdue.edu GPS signal propagation GPS signal (= carrier phase modulated by satellite PRN code) sent by satellite. About 66 msec (0,000 km)
ESTIMATION OF IONOSPHERIC DELAY FOR SINGLE AND DUAL FREQUENCY GPS RECEIVERS: A COMPARISON
 ESTMATON OF ONOSPHERC DELAY FOR SNGLE AND DUAL FREQUENCY GPS RECEVERS: A COMPARSON K. Durga Rao, Dr. V B S Srilatha ndira Dutt Dept. of ECE, GTAM UNVERSTY Abstract: Global Positioning System is the emerging
ESTMATON OF ONOSPHERC DELAY FOR SNGLE AND DUAL FREQUENCY GPS RECEVERS: A COMPARSON K. Durga Rao, Dr. V B S Srilatha ndira Dutt Dept. of ECE, GTAM UNVERSTY Abstract: Global Positioning System is the emerging
Estimation of the Stochastic Model for Long- Baseline Kinematic GPS Applications
 Estimation of the Stochastic Model for Long- Baseline Kinematic GPS Applications Donghyun Kim and Richard B. Langley Geodetic Research Laboratory, Department of Geodesy and Geomatics Engineering, University
Estimation of the Stochastic Model for Long- Baseline Kinematic GPS Applications Donghyun Kim and Richard B. Langley Geodetic Research Laboratory, Department of Geodesy and Geomatics Engineering, University
Ionospheric Correction and Ambiguity Resolution in DGPS with Single Frequency
 Applied Physics Research November, 9 Ionospheric Correction and Ambiguity Resolution in DGPS with Single Frequency Norsuzila Ya acob Department of Electrical, Electronics and Systems Engineering Universiti
Applied Physics Research November, 9 Ionospheric Correction and Ambiguity Resolution in DGPS with Single Frequency Norsuzila Ya acob Department of Electrical, Electronics and Systems Engineering Universiti
GNSS for Landing Systems and Carrier Smoothing Techniques Christoph Günther, Patrick Henkel
 GNSS for Landing Systems and Carrier Smoothing Techniques Christoph Günther, Patrick Henkel Institute of Communications and Navigation Page 1 Instrument Landing System workhorse for all CAT-I III approach
GNSS for Landing Systems and Carrier Smoothing Techniques Christoph Günther, Patrick Henkel Institute of Communications and Navigation Page 1 Instrument Landing System workhorse for all CAT-I III approach
LOCAL IONOSPHERIC MODELLING OF GPS CODE AND CARRIER PHASE OBSERVATIONS
 Survey Review, 40, 309 pp.71-84 (July 008) LOCAL IONOSPHERIC MODELLING OF GPS CODE AND CARRIER PHASE OBSERVATIONS H. Nahavandchi and A. Soltanpour Norwegian University of Science and Technology, Division
Survey Review, 40, 309 pp.71-84 (July 008) LOCAL IONOSPHERIC MODELLING OF GPS CODE AND CARRIER PHASE OBSERVATIONS H. Nahavandchi and A. Soltanpour Norwegian University of Science and Technology, Division
Comparative analysis of GNSS Real Time Kinematic methods for navigation
 IAV Hassan II Comparative analysis of GNSS Real Time Kinematic methods for navigation Mourad BOUZIANI School of Geomatic Sciences, IAV Hassan II, Rabat, Morocco. Coordinator of the Master - GNSS, IAV&
IAV Hassan II Comparative analysis of GNSS Real Time Kinematic methods for navigation Mourad BOUZIANI School of Geomatic Sciences, IAV Hassan II, Rabat, Morocco. Coordinator of the Master - GNSS, IAV&
Generation of Consistent GNSS SSR Corrections
 Generation of Consistent GNSS SSR Corrections for Distributed CORS Networks Jannes Wübbena, Martin Schmitz, Gerhard Wübbena Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Abstract Generation of Consistent
Generation of Consistent GNSS SSR Corrections for Distributed CORS Networks Jannes Wübbena, Martin Schmitz, Gerhard Wübbena Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Abstract Generation of Consistent
Improving Real-Time Kinematic PPP with Instantaneous Cycle-Slip Correction
 Improving Real-Time Kinematic PPP with Instantaneous Cycle-Slip Correction Simon Banville and Richard B. Langley, University of New Brunswick, Canada BIOGRAPHY Simon Banville is a Ph.D. candidate in the
Improving Real-Time Kinematic PPP with Instantaneous Cycle-Slip Correction Simon Banville and Richard B. Langley, University of New Brunswick, Canada BIOGRAPHY Simon Banville is a Ph.D. candidate in the
PDHonline Course L105 (12 PDH) GPS Surveying. Instructor: Jan Van Sickle, P.L.S. PDH Online PDH Center
 GPS Surveying. Instructor: Jan Van Sickle, P.L.S. PDH Online PDH Center") PDHonline Course L105 (12 PDH) GPS Surveying Instructor: Jan Van Sickle, P.L.S. 2012 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
PDHonline Course L105 (12 PDH) GPS Surveying Instructor: Jan Van Sickle, P.L.S. 2012 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
LocataNet: Intelligent time-synchronised pseudolite transceivers for cm-level stand-alone positioning
 LocataNet: Intelligent time-synchronised pseudolite transceivers for cm-level stand-alone positioning J. Barnes, C. Rizos, J. Wang Satellite Navigation and Positioning (SNAP) Group School of Surveying
LocataNet: Intelligent time-synchronised pseudolite transceivers for cm-level stand-alone positioning J. Barnes, C. Rizos, J. Wang Satellite Navigation and Positioning (SNAP) Group School of Surveying
Phase Center Calibration and Multipath Test Results of a Digital Beam-Steered Antenna Array
 Phase Center Calibration and Multipath Test Results of a Digital Beam-Steered Antenna Array Kees Stolk and Alison Brown, NAVSYS Corporation BIOGRAPHY Kees Stolk is an engineer at NAVSYS Corporation working
Phase Center Calibration and Multipath Test Results of a Digital Beam-Steered Antenna Array Kees Stolk and Alison Brown, NAVSYS Corporation BIOGRAPHY Kees Stolk is an engineer at NAVSYS Corporation working
Determination of refractivity variations with GNSS and ultra-stable frequency standards
 Determination of refractivity variations with GNSS and ultra-stable frequency standards Markus Vennebusch, Steffen Schön, Ulrich Weinbach Institut für Erdmessung (IfE) / Institute of Geodesy Leibniz-Universität
Determination of refractivity variations with GNSS and ultra-stable frequency standards Markus Vennebusch, Steffen Schön, Ulrich Weinbach Institut für Erdmessung (IfE) / Institute of Geodesy Leibniz-Universität
A New Algorithm for GNSS Precise Positioning in Constrained Area
 A New Algorithm for GNSS Precise Positioning in Constrained Area Sébastien CARCANAGUE, M3SYSTEMS/ENAC, France Olivier JULIEN, ENAC, France Willy VIGNEAU, M3SYSTEMS, France Christophe MACABIAU, ENAC, France
A New Algorithm for GNSS Precise Positioning in Constrained Area Sébastien CARCANAGUE, M3SYSTEMS/ENAC, France Olivier JULIEN, ENAC, France Willy VIGNEAU, M3SYSTEMS, France Christophe MACABIAU, ENAC, France
Cycle Slip Detection and Correction for Precise Point Positioning
 1 Cycle Slip Detection and Correction for Precise Point Positioning Pedro Silva Technical University of Lisbon - Instituto Superior Técnico pedro.silva@ist.utl.pt Abstract Over the last years precise point
1 Cycle Slip Detection and Correction for Precise Point Positioning Pedro Silva Technical University of Lisbon - Instituto Superior Técnico pedro.silva@ist.utl.pt Abstract Over the last years precise point
IMPROVED RELATIVE POSITIONING FOR PATH FOLLOWING IN AUTONOMOUS CONVOYS
 2018 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM AUTONOMOUS GROUND SYSTEMS (AGS) TECHNICAL SESSION AUGUST 7-9, 2018 - NOVI, MICHIGAN IMPROVED RELATIVE POSITIONING FOR PATH FOLLOWING
2018 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM AUTONOMOUS GROUND SYSTEMS (AGS) TECHNICAL SESSION AUGUST 7-9, 2018 - NOVI, MICHIGAN IMPROVED RELATIVE POSITIONING FOR PATH FOLLOWING
MONITORING SEA LEVEL USING GPS
 38 MONITORING SEA LEVEL USING GPS Hasanuddin Z. Abidin* Abstract GPS (Global Positioning System) is a passive, all-weather satellite-based navigation and positioning system, which is designed to provide
38 MONITORING SEA LEVEL USING GPS Hasanuddin Z. Abidin* Abstract GPS (Global Positioning System) is a passive, all-weather satellite-based navigation and positioning system, which is designed to provide
Effect of Quasi Zenith Satellite (QZS) on GPS Positioning
 on GPS Positioning") Effect of Quasi Zenith Satellite (QZS) on GPS ing Tomoji Takasu 1, Takuji Ebinuma 2, and Akio Yasuda 3 Laboratory of Satellite Navigation, Tokyo University of Marine Science and Technology 1 (Tel: +81-5245-7365,
Effect of Quasi Zenith Satellite (QZS) on GPS ing Tomoji Takasu 1, Takuji Ebinuma 2, and Akio Yasuda 3 Laboratory of Satellite Navigation, Tokyo University of Marine Science and Technology 1 (Tel: +81-5245-7365,
MODIFIED GPS-OTF ALGORITHMS FOR BRIDGE MONITORING: APPLICATION TO THE PIERRE-LAPORTE SUSPENSION BRIDGE IN QUEBEC CITY
 MODIFIED GPS-OTF ALGORITHMS FOR BRIDGE MOITORIG: APPLICATIO TO THE PIERRE-LAPORTE SUSPESIO BRIDGE I QUEBEC CIT Rock Santerre and Luc Lamoureux Centre de Recherche en Géomatique Université Laval Québec,
MODIFIED GPS-OTF ALGORITHMS FOR BRIDGE MOITORIG: APPLICATIO TO THE PIERRE-LAPORTE SUSPESIO BRIDGE I QUEBEC CIT Rock Santerre and Luc Lamoureux Centre de Recherche en Géomatique Université Laval Québec,
Integrity of Satellite Navigation in the Arctic
 Integrity of Satellite Navigation in the Arctic TODD WALTER & TYLER REID STANFORD UNIVERSITY APRIL 2018 Satellite Based Augmentation Systems (SBAS) in 2018 2 SBAS Networks in 2021? 3 What is Meant by Integrity?
Integrity of Satellite Navigation in the Arctic TODD WALTER & TYLER REID STANFORD UNIVERSITY APRIL 2018 Satellite Based Augmentation Systems (SBAS) in 2018 2 SBAS Networks in 2021? 3 What is Meant by Integrity?
HIGH PRECISION TRACKING SYSTEM FOR VIRTUAL REALITY USING GPS
 HIGH PRECISION TRACKING SYSTEM FOR VIRTUAL REALITY USING GPS AALBORG UNIVERSITY INSTITUTE OF ELECTRONIC SYSTEMS GROUP 948 2002 AALBORG UNIVERSITY INSTITUTE OF ELECTRONIC SYSTEMS Fredrik Bajersvej 7 DK-9220
HIGH PRECISION TRACKING SYSTEM FOR VIRTUAL REALITY USING GPS AALBORG UNIVERSITY INSTITUTE OF ELECTRONIC SYSTEMS GROUP 948 2002 AALBORG UNIVERSITY INSTITUTE OF ELECTRONIC SYSTEMS Fredrik Bajersvej 7 DK-9220
Ambiguity Resolution (PPP-AR) For Precise Point Positioning Based on Combined GPS Observations
 For Precise Point Positioning Based on Combined GPS Observations") International Global Navigation Satellite Systems Association IGNSS Conference 2016 Colombo Theatres, Kensington Campus, UNSW Australia 6 8 December 2016 Ambiguity Resolution (PPP-AR) For Precise Point
International Global Navigation Satellite Systems Association IGNSS Conference 2016 Colombo Theatres, Kensington Campus, UNSW Australia 6 8 December 2016 Ambiguity Resolution (PPP-AR) For Precise Point