Positioning Techniques. João F. Galera Monico - UNESP Tuesday 12 Sep
|
|
|
- Blaise Cannon
- 5 years ago
- Views:
Transcription

1

2 Positioning Techniques João F. Galera Monico - UNESP Tuesday 12 Sep
3 Positioning methods Absolute Positioning Static and kinematic SPP and PPP Relative Positioning Static Static rapid Semi kinematic Kinematic RTK and NRTK
4 Single Point Positioning (SPP) Code based - pseudorange Knowing the satellite coordinates, it is possible to compute the coordinates of the user antenna in the same frame From a geometrical point of view, only three satellites would be enough However, the receiver clock is not synchronized with the satellites system clock An extra satellite is required
5 SPP
6 Considering the code pseudorange measurements (SF) TGD Correction (GPS Galileo - QZSS) SF C/A users has to apply additional P1-C1 This estimable receiver clock is a combination of the true receiver clock error plus the (frequency-dependent) receiver hardware delay
7
8 (SPP) The linearized system will be given by: s=1,2, n>4
9 n-u = s-4
10 Comments on SPP Satellite positioning from broadcast ephemeris Accuracy in the level of 10 to 15 m Often referred as navigation solution solution for most of mobile It can also be computed with dual frequency data
11 Precise Point Positioning (PPP) Undifferenced, precise point positioning (PPP) techniques aim to provide absolute positions in a precision global reference frame. It uses pseudoranges and carrier phase observations in combination with precise (IGS) products. Precise orbits and clocks Single-frequency and multifrequency PPP One or more constellation.
12 Precise Point Positioning The precise (IGS) products (precise satellite clocks) are based on the ionosphere-free combination, similar to the broadcast satellite clock for most constellations. For single-frequency PPP, corrections for the satellite DCBs are required. but these are also provided by the IGS or its analysis centers. (Tgd) For Single-frequency PPP users ionospheric corrections are essential and these can be obtained from the IGS as well, in the GIM format. Can also be estimated
13 Precise Point Positioning
14 Precise Point Positioning GLONASS PPP (and also RTK) requires a-priori correction of the receiver- and frequencydependent interchannel or interfrequency biases, at least for the phase data (L. Wanninger: Carrier-phase inter-frequency biases of GLONASS receivers, J. Geod. 86(2), (2012) ). Importante para solução das ambiguidades All other cited errors have to be appropriated treated.
 the user applies the corrections to his data, enabling singlereceiver precise positioning Dennis")
15 PPP Concept (a) CORS (global or regional) network determines GNSS parameters; (b) satellite-dependent parameters are uploaded by the network and downloaded by a user; (c) the user applies the corrections to his data, enabling singlereceiver precise positioning Dennis Odijk
16 Single Frequency (SF) PPP It is assumed that identical offsets for the satellite clock and hardware bias apply to both code and phase observations, as well as a- priori corrections for tropospheric and ionospheric delays. And as the satellite clock offsets are based on the Ion-Free combination (as is the case with precise IGS products), the correction terms for code and phase then can be given as:

17
18
19
20 SF PPP The ambiguities is not integer has bias Rank defect The Ionosphere was taken from a model (GIM for instance) We can also estimate the Ionosphere and include constraints if available. Accuracy in the level of dm after about 30 minutes of data collection.
21 Dual Frequency (DF) PPP
22 DF PPP With these modifications, the steps to get the ION-FREE solution is equal to the SF PPP Including the ionosphere as unknown, without combine the observations, is another option (the state of the art of PPP). At such case, the ionosphere will be estimated, and can be constrained if information is available.
23 International GNSS Service (IGS) RT IGS Real Time was developed to provide Real Time PPP Several products available. Corrections to the broadcast ephemeris and clocks

24

25


26
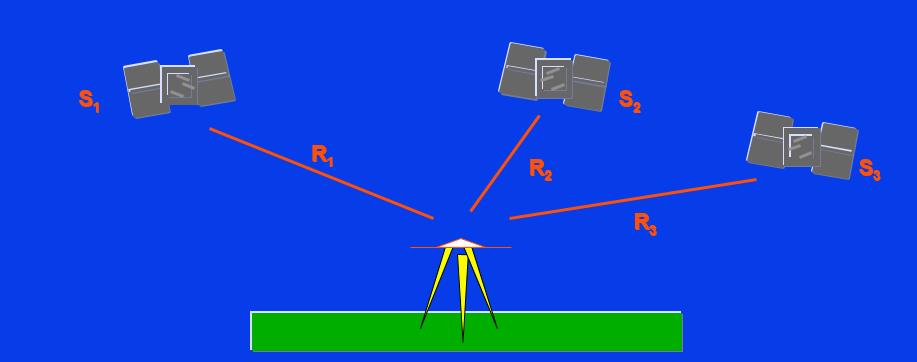
27 PPP with Ambiguity Resolution (AR) Several models were developed Consist in the determination of fractional part of the satellite phase biases using a network of receivers It has to be provided to the user Such fractional part (bias) is for some extend constant (at least for few hours/days).
28 Ambiguity Fractional Part (FCB)
29 Ion-free versus uncombined PPP Iono-free combination, could make the inclusion of triple frequency observations to be cumbersome, since many possible dualcombinations exist. In order to provide a suitable representation for triple frequency receivers uncombined phase biases model compatible with the RTCM SSR framework may be better RTCM (Real-Time Maritime Services) SSR (State Space Representation)
30 The PPP-Wizard software package uses uncombined phase biases model ( PPP-RTK integer PPP improved by atmospheric corrections from local/regional RTK networks
31 PPP-AR
32 SSR Computation In RTK or NRTK systems, the main errors affecting the GNSS measurements are monitored by a GNSS reference station or a CORS dense network, and provided to the users as range corrections OSR (Observation-Space-Representation) OSR is not able to dissociate the different errors impacting GNSS measurements
33 SSR Computation State-Space-Modeling (SSM) is the representation of all relevant physical effects by a mathematical model The parameters that are estimated in real-time using CORS network Knowing the temporal and spatial behavior of these effects, it is possible to optimize the use of all observations coming from the CORS network
34 SSR Computation The state vector of such State-Space- Representation (SSR) is provided by the integrated and optimized SSM. This representation is applicable to PPP-RTK
35 .
36 .
37 Real Time PPP activity Install the BNC (BKG Ntrip Client) Get access to data and one kind of IGS corrections Choose a station available in real time and perform real time PPP. "IGS-IP" <igs-ip@bkg.bund.de> Provide Analysis and comment of the results
38 Real Time Kinematic (RTK) Concept: a base station provide corrections (observations) to a rover receiver in real time. It is mainly carrier based (DD observables) The aim is to reduce and remove errors common to a base station and rover pair All data processing is carried out at the rover. Ambiguity fixed Accuracy of up to 1 cm + 1 ppm.

39 Real Time Kinematic (RTK) It is a relative positioning method (2017) Springer Handbook of Global Navigation Satellite Systems Editors: Teunissen, Peter J.G., Montenbruck, Oliver (Eds.)

40

41 Drawback of RTK Deteriorate with distance from base station troposphere (2017) Springer Handbook of Global Navigation Satellite Systems Editors: Teunissen, Peter J.G., Montenbruck, Oliver (Eds.)
42 From RTK to Network RTK (NRTK) It is based on the use of several widely spaced permanent stations. Depending on the implementation, positioning data from the permanent stations is regularly communicated to a central processing station. On demand from RTK user terminals, which transmit their approximate location to the central station, the central station calculates and transmits correction information or corrected position to the RTK user terminal.
43 The benefit of this approach is an overall reduction in the number of RTK base stations required. Depending on the implementation, data may be transmitted over cellular radio links or other wireless medium.
44 The distance dependent errors can be accurately modeled using the measurements of an array of GNSS reference stations surrounding the rover site. Therefore, the solution to the distance limitation of RTK lies in multibase techniques which became popular under the name network RTK, sometime abbreviated to NRTK.
45 Network RTK technique enabled the establishment of positioning services which serve larger regions or whole countries. One possibility is to create a VRS (Virtual Reference Station) close to the user The user than perform the relative positioning.
46

47 φ c λ c h c φ c λ c h c φ c λ c h c Stations Bidirectional Link RTCM-VRS VRS NMEA Relative positioning φ c λ c h c φ c λ c h c φ c λ c h c


48 RTK experiment - Usina Guarani Mendonça; Monico; Motoki (2012)

49 São Paulo State NRTK.
 84,13km 8 min 4 seg 13:24:52 as")
50 Statistical results from an experiment of station Tupã (SP-Brazil). Estação de Coleta TUPÃ Base/RTK Tempo de Pontos Início Fim inicialização coletados VRS 1min 24 seg 13:07:01 as 13:18: ARAC (GNSS) 84,13km 8 min 4 seg 13:24:52 as 13:43: VRS 2 min 23 seg 13:47:55 as 14:08: ARAC_S (GPS) 84,13 km 12 min 19 seg 14:18:35 as 14:44:30 205
51 Comments on NTRK It works quite well for very stable ionosphere We can say the same for PPP and PPP-RTK In the equatorial region during some period we have problems due to the behavior of the ionosphere, mainly due to the Ionosphere Scintillation after the sunset.
52 Comments on NTRK Several research can be carried out on these topics.
RTCM State Space Representation (SSR) Overall Concepts Towards PPP-RTK
 Overall Concepts Towards PPP-RTK") RTCM State Space Representation (SSR) Overall Concepts Towards PPP-RTK Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de Contents Terms and Abbreviations RTCM-SSR Working Group GNSS Error Sources
RTCM State Space Representation (SSR) Overall Concepts Towards PPP-RTK Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de Contents Terms and Abbreviations RTCM-SSR Working Group GNSS Error Sources
PPP with Ambiguity Resolution (AR) using RTCM-SSR
 using RTCM-SSR") PPP with Ambiguity Resolution (AR) using RTCM-SSR Gerhard Wübbena, Martin Schmitz, Andreas Bagge Geo++ GmbH 30827 Garbsen Germany www.geopp.de PPP with Ambiguity Resolution (AR) using RTCM-SSR Abstract
PPP with Ambiguity Resolution (AR) using RTCM-SSR Gerhard Wübbena, Martin Schmitz, Andreas Bagge Geo++ GmbH 30827 Garbsen Germany www.geopp.de PPP with Ambiguity Resolution (AR) using RTCM-SSR Abstract
Introduction to GNSS Base-Station
 Introduction to GNSS Base-Station Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 Introduction GPS or GNSS observation
Introduction to GNSS Base-Station Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 Introduction GPS or GNSS observation
SSR Technology for Scalable Real-Time GNSS Applications
 SSR Technology for Scalable Real-Time GNSS Applications Gerhard Wübbena, Jannes Wübbena, Temmo Wübbena, Martin Schmitz Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Abstract SSR Technology for scalable
SSR Technology for Scalable Real-Time GNSS Applications Gerhard Wübbena, Jannes Wübbena, Temmo Wübbena, Martin Schmitz Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Abstract SSR Technology for scalable
GNSS OBSERVABLES. João F. Galera Monico - UNESP Tuesday 12 Sep
 GNSS OBSERVABLES João F. Galera Monico - UNESP Tuesday Sep Basic references Basic GNSS Observation Equations Pseudorange Carrier Phase Doppler SNR Signal to Noise Ratio Pseudorange Observation Equation
GNSS OBSERVABLES João F. Galera Monico - UNESP Tuesday Sep Basic references Basic GNSS Observation Equations Pseudorange Carrier Phase Doppler SNR Signal to Noise Ratio Pseudorange Observation Equation
ION GNSS 2011 FILLING IN THE GAPS OF RTK WITH REGIONAL PPP
 ION GNSS 2011 FILLING IN THE GAPS OF RTK WITH REGIONAL PPP SEPTEMBER 22 th, 2011 ION GNSS 2011. PORTLAND, OREGON, USA SESSION F3: PRECISE POSITIONING AND RTK FOR CIVIL APPLICATION C. García A. Mozo P.
ION GNSS 2011 FILLING IN THE GAPS OF RTK WITH REGIONAL PPP SEPTEMBER 22 th, 2011 ION GNSS 2011. PORTLAND, OREGON, USA SESSION F3: PRECISE POSITIONING AND RTK FOR CIVIL APPLICATION C. García A. Mozo P.
Geodetic Reference via Precise Point Positioning - RTK
 2012 Geo++ GmbH Geodetic Reference via Precise Point Positioning - RTK Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de 2012 Geo++ GmbH Contents Terms and Abbreviations GNSS Principles GNSS
2012 Geo++ GmbH Geodetic Reference via Precise Point Positioning - RTK Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de 2012 Geo++ GmbH Contents Terms and Abbreviations GNSS Principles GNSS
Multisystem Real Time Precise-Point-Positioning, today with GPS+GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS
 2 International Symposium on /GNSS October 26-28, 2. Multisystem Real Time Precise-Point-Positioning, today with +GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS Álvaro Mozo García,
2 International Symposium on /GNSS October 26-28, 2. Multisystem Real Time Precise-Point-Positioning, today with +GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS Álvaro Mozo García,
Performance Evaluation Of Real Time Precise Point Positioning (RT-PPP) In Static & Kinematic Modes In Egypt
 In Static & Kinematic Modes In Egypt") Performance Evaluation Of Real Time Precise Point Positioning (RT-PPP) In Static & Kinematic Modes In Egypt Eng. Ahmed Mansour Abdallah Dr. Mahmoud Abd Rabbou Prof. Adel El.shazly Geomatic Branch, Civil
Performance Evaluation Of Real Time Precise Point Positioning (RT-PPP) In Static & Kinematic Modes In Egypt Eng. Ahmed Mansour Abdallah Dr. Mahmoud Abd Rabbou Prof. Adel El.shazly Geomatic Branch, Civil
Generation of Consistent GNSS SSR Corrections
 Generation of Consistent GNSS SSR Corrections for Distributed CORS Networks Jannes Wübbena, Martin Schmitz, Gerhard Wübbena Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Abstract Generation of Consistent
Generation of Consistent GNSS SSR Corrections for Distributed CORS Networks Jannes Wübbena, Martin Schmitz, Gerhard Wübbena Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Abstract Generation of Consistent
Global Correction Services for GNSS
 Global Correction Services for GNSS Hemisphere GNSS Whitepaper September 5, 2015 Overview Since the early days of GPS, new industries emerged while existing industries evolved to use position data in real-time.
Global Correction Services for GNSS Hemisphere GNSS Whitepaper September 5, 2015 Overview Since the early days of GPS, new industries emerged while existing industries evolved to use position data in real-time.
Fast convergence of Trimble CenterPoint RTX by regional augmentation
 Fast convergence of Trimble CenterPoint RTX by regional augmentation Dr. Ralf Drescher Trimble Terrasat GmbH, Munich EGU General Assembly 2015, Vienna Thursday, 16 April 2015 Outline Introduction CenterPoint
Fast convergence of Trimble CenterPoint RTX by regional augmentation Dr. Ralf Drescher Trimble Terrasat GmbH, Munich EGU General Assembly 2015, Vienna Thursday, 16 April 2015 Outline Introduction CenterPoint
Guochang Xu GPS. Theory, Algorithms and Applications. Second Edition. With 59 Figures. Sprin ger
 Guochang Xu GPS Theory, Algorithms and Applications Second Edition With 59 Figures Sprin ger Contents 1 Introduction 1 1.1 AKeyNoteofGPS 2 1.2 A Brief Message About GLONASS 3 1.3 Basic Information of Galileo
Guochang Xu GPS Theory, Algorithms and Applications Second Edition With 59 Figures Sprin ger Contents 1 Introduction 1 1.1 AKeyNoteofGPS 2 1.2 A Brief Message About GLONASS 3 1.3 Basic Information of Galileo
MGA Webinar Series : 1 Very Cheap RTK Receivers: Changing the Landscape of Positioning Services
 MGA Webinar Series : 1 Very Cheap RTK Receivers: Changing the Landscape of Positioning Services Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp
MGA Webinar Series : 1 Very Cheap RTK Receivers: Changing the Landscape of Positioning Services Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp
Precise Positioning GNSS Applications
 Precise Point Positioning: Is the Era of Differential GNSS Positioning Drawing to an End? School of Surveying & Spatial Information Systems, UNSW, Sydney, Australia Chris Rizos 1, Volker Janssen 2, Craig
Precise Point Positioning: Is the Era of Differential GNSS Positioning Drawing to an End? School of Surveying & Spatial Information Systems, UNSW, Sydney, Australia Chris Rizos 1, Volker Janssen 2, Craig
Quasi-Zenith Satellite System (QZSS)
") Transmission of Augmentation Corrections using the Japanese QZSS for Real-Time Precise Point Positioning in Australia Ken Harima 1, Suelynn Choy 1, Mazher Choudhury 2, Chris Rizos 2, Satoshi Kogure 3 1
Transmission of Augmentation Corrections using the Japanese QZSS for Real-Time Precise Point Positioning in Australia Ken Harima 1, Suelynn Choy 1, Mazher Choudhury 2, Chris Rizos 2, Satoshi Kogure 3 1
Trimble Business Center:
 Trimble Business Center: Modernized Approaches for GNSS Baseline Processing Trimble s industry-leading software includes a new dedicated processor for static baselines. The software features dynamic selection
Trimble Business Center: Modernized Approaches for GNSS Baseline Processing Trimble s industry-leading software includes a new dedicated processor for static baselines. The software features dynamic selection
Posicionamento por ponto com. Posicionamento por satélite UNESP PP 2017 Prof. Galera
 Posicionamento por ponto com multiconstelação GNSS Posicionamento por satélite UNESP PP 2017 Prof. Galera Single-GNSS Observation Equations Considering j = 1; : : : ; f S the frequencies of a certain GNSS
Posicionamento por ponto com multiconstelação GNSS Posicionamento por satélite UNESP PP 2017 Prof. Galera Single-GNSS Observation Equations Considering j = 1; : : : ; f S the frequencies of a certain GNSS
RTCM-SSR Strategy of Bias Treatment
 RTCM-SSR Strategy of Bias Treatment Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de Chair of RTCM-SSR WG www.rtcm.org RTCM-SC104 SSR Development working group established in 2007 3 message
RTCM-SSR Strategy of Bias Treatment Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de Chair of RTCM-SSR WG www.rtcm.org RTCM-SC104 SSR Development working group established in 2007 3 message
Kalman Filter Based Integer Ambiguity. Ionosphere and Troposphere Estimation
 ION GNSS 2010 Kalman Filter Based Integer Ambiguity Resolution Strategy t for Long Baseline RTK with Ionosphere and Troposphere Estimation Tokyo University of Marine Science and Technology Tomoji jitakasu
ION GNSS 2010 Kalman Filter Based Integer Ambiguity Resolution Strategy t for Long Baseline RTK with Ionosphere and Troposphere Estimation Tokyo University of Marine Science and Technology Tomoji jitakasu
The IGS Real-time Pilot Project
 The IGS Real-time Pilot Project The Development of Real-time IGS Correction Products for Precise Point Positioning Mark Caissy, Georg Weber, Loukis Agrotis, Gerhard Wübbena, and Manuel Hernández-Pajares
The IGS Real-time Pilot Project The Development of Real-time IGS Correction Products for Precise Point Positioning Mark Caissy, Georg Weber, Loukis Agrotis, Gerhard Wübbena, and Manuel Hernández-Pajares
Multi-GNSS / Multi-Signal code bias determination from raw GNSS observations
 Multi-GNSS / Multi-Signal code bias determination from raw GNSS observations F. Reckeweg, E. Schönemann, T. Springer, M. Becker, W. Enderle Geodätische Woche 2016 InterGEO 11.-13. October 2016 Hamburg,
Multi-GNSS / Multi-Signal code bias determination from raw GNSS observations F. Reckeweg, E. Schönemann, T. Springer, M. Becker, W. Enderle Geodätische Woche 2016 InterGEO 11.-13. October 2016 Hamburg,
Filling in the gaps of RTK with Regional PPP
 Filling in the gaps of RTK with Regional PPP Guillermo Tobías, GMV, Spain Cristina García, GMV, Spain Álvaro Mozo, GMV, Spain Pedro Navarro, GMV, Spain Ricardo Píriz, GMV, Spain Irma Rodríguez, GMV, Spain
Filling in the gaps of RTK with Regional PPP Guillermo Tobías, GMV, Spain Cristina García, GMV, Spain Álvaro Mozo, GMV, Spain Pedro Navarro, GMV, Spain Ricardo Píriz, GMV, Spain Irma Rodríguez, GMV, Spain
Precise Positioning with NovAtel CORRECT Including Performance Analysis
 Precise Positioning with NovAtel CORRECT Including Performance Analysis NovAtel White Paper April 2015 Overview This article provides an overview of the challenges and techniques of precise GNSS positioning.
Precise Positioning with NovAtel CORRECT Including Performance Analysis NovAtel White Paper April 2015 Overview This article provides an overview of the challenges and techniques of precise GNSS positioning.
Integer Ambiguity Resolution for Precise Point Positioning Patrick Henkel
 Integer Ambiguity Resolution for Precise Point Positioning Patrick Henkel Overview Introduction Sequential Best-Integer Equivariant Estimation Multi-frequency code carrier linear combinations Galileo:
Integer Ambiguity Resolution for Precise Point Positioning Patrick Henkel Overview Introduction Sequential Best-Integer Equivariant Estimation Multi-frequency code carrier linear combinations Galileo:
Real-Time and Multi-GNSS Key Projects of the International GNSS Service
 Real-Time and Multi-GNSS Key Projects of the International GNSS Service Urs Hugentobler, Chris Rizos, Mark Caissy, Georg Weber, Oliver Montenbruck, Ruth Neilan EUREF 2013 Symposium Budapest, Hungary, May
Real-Time and Multi-GNSS Key Projects of the International GNSS Service Urs Hugentobler, Chris Rizos, Mark Caissy, Georg Weber, Oliver Montenbruck, Ruth Neilan EUREF 2013 Symposium Budapest, Hungary, May
Effect of Quasi Zenith Satellite (QZS) on GPS Positioning
 on GPS Positioning") Effect of Quasi Zenith Satellite (QZS) on GPS ing Tomoji Takasu 1, Takuji Ebinuma 2, and Akio Yasuda 3 Laboratory of Satellite Navigation, Tokyo University of Marine Science and Technology 1 (Tel: +81-5245-7365,
Effect of Quasi Zenith Satellite (QZS) on GPS ing Tomoji Takasu 1, Takuji Ebinuma 2, and Akio Yasuda 3 Laboratory of Satellite Navigation, Tokyo University of Marine Science and Technology 1 (Tel: +81-5245-7365,
Positioning Australia for its farming future
 Positioning Australia for its farming future Utilizing the Japanese satellite navigation QZSS system to provide centimetre positioning accuracy across ALL Australia David Lamb 1,2 and Phil Collier 2 1
Positioning Australia for its farming future Utilizing the Japanese satellite navigation QZSS system to provide centimetre positioning accuracy across ALL Australia David Lamb 1,2 and Phil Collier 2 1
Evaluation of Multi-Constellation GNSS Precise Point Positioning (PPP) Techniques in Egypt
 Techniques in Egypt") Evaluation of Multi-Constellation GNSS Precise Point Positioning (PPP) Techniques in Egypt Mahmoud Abd Rabbou and Adel El-Shazly Department of Civil Engineering, Cairo University Presented by; Dr. Mahmoud
Evaluation of Multi-Constellation GNSS Precise Point Positioning (PPP) Techniques in Egypt Mahmoud Abd Rabbou and Adel El-Shazly Department of Civil Engineering, Cairo University Presented by; Dr. Mahmoud
QZSS and LEX Signal. Performance of Real-Time Precise Point Positioning Using MADOCA-LEX Augmentation Messages. Outline
 Performance of Real-Time Precise Point Positioning Using MADOCA-LEX Augmentation Messages Suelynn Choy 1, Ken Harima 1, Mohammad Choudhury 2, Yong Li 2, Yaka Wakabayashi 3, Thomas Grinter 4, Satoshi Kogure
Performance of Real-Time Precise Point Positioning Using MADOCA-LEX Augmentation Messages Suelynn Choy 1, Ken Harima 1, Mohammad Choudhury 2, Yong Li 2, Yaka Wakabayashi 3, Thomas Grinter 4, Satoshi Kogure
Real-time challenges of an. Australian National Positioning Infrastructure
 Real-time challenges of an Australian National Positioning Infrastructure S. Melachroinos 1, T. Li 2,1, T. Papanikolaou 2,1, and J. Dawson 1 1 Geoscience Australia Geodesy Section GSM Group CSEM Division
Real-time challenges of an Australian National Positioning Infrastructure S. Melachroinos 1, T. Li 2,1, T. Papanikolaou 2,1, and J. Dawson 1 1 Geoscience Australia Geodesy Section GSM Group CSEM Division
Modelling GPS Observables for Time Transfer
 Modelling GPS Observables for Time Transfer Marek Ziebart Department of Geomatic Engineering University College London Presentation structure Overview of GPS Time frames in GPS Introduction to GPS observables
Modelling GPS Observables for Time Transfer Marek Ziebart Department of Geomatic Engineering University College London Presentation structure Overview of GPS Time frames in GPS Introduction to GPS observables
Generating VRS Data Using Atmospheric Models: How Far Can We Go?
 Generating VRS Data Using Atmospheric Models: How Far Can We Go? Daniele Barroca Marra Alves (PhD Student) Adj. Prof. João Francisco Galera Monico Luiz Fernando Antonio Dalbelo (MSc Student) Faculty of
Generating VRS Data Using Atmospheric Models: How Far Can We Go? Daniele Barroca Marra Alves (PhD Student) Adj. Prof. João Francisco Galera Monico Luiz Fernando Antonio Dalbelo (MSc Student) Faculty of
ORBITS AND CLOCKS FOR GLONASS PPP
 ION GNSS 2009 ORBITS AND CLOCKS FOR GLONASS PPP SEPTEMBER 22-25, 2009 - SAVANNAH, GEORGIA SESSION E3: PPP AND NETWORK-BASED RTK 1 D. Calle A. Mozo P. Navarro R. Píriz D. Rodríguez G. Tobías September 24,
ION GNSS 2009 ORBITS AND CLOCKS FOR GLONASS PPP SEPTEMBER 22-25, 2009 - SAVANNAH, GEORGIA SESSION E3: PPP AND NETWORK-BASED RTK 1 D. Calle A. Mozo P. Navarro R. Píriz D. Rodríguez G. Tobías September 24,
SSR & RTCM Current Status
 SSR & RTCM Current Status Gerhard Wübbena, Martin Schmitz, Jannes Wübbena Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Outline RTCM SC104 WG s SSR Today SSR Formats SC104 RTCM-SSR Geo++ RTCM 4090 SSR
SSR & RTCM Current Status Gerhard Wübbena, Martin Schmitz, Jannes Wübbena Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Outline RTCM SC104 WG s SSR Today SSR Formats SC104 RTCM-SSR Geo++ RTCM 4090 SSR
THE INFLUENCE OF ZENITH TROPOSPHERIC DELAY ON PPP-RTK. S. Nistor a, *, A.S. Buda a,
 THE INFLUENCE OF ZENITH TROPOSPHERIC DELAY ON PPP-RTK S. Nistor a, *, A.S. Buda a, a University of Oradea, Faculty of Civil Engineering, Cadastre and Architecture, Department Cadastre-Architecture, Romania,
THE INFLUENCE OF ZENITH TROPOSPHERIC DELAY ON PPP-RTK S. Nistor a, *, A.S. Buda a, a University of Oradea, Faculty of Civil Engineering, Cadastre and Architecture, Department Cadastre-Architecture, Romania,
FieldGenius Technical Notes GPS Terminology
 FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
AUTONOMOUS ISOTROPY-BASED INTEGRITY USING GPS AND GLONASS
 ION GNSS 2010 AUTONOMOUS ISOTROPY-BASED INTEGRITY USING GPS AND GLONASS SEPTEMBER 21-24, 2010 - PORTLAND, OREGON SESSION E4: INTEGRITY MONITORING FOR NEXT GENERATION APPLICATIONS M. Azaola D. Calle A.Mozo
ION GNSS 2010 AUTONOMOUS ISOTROPY-BASED INTEGRITY USING GPS AND GLONASS SEPTEMBER 21-24, 2010 - PORTLAND, OREGON SESSION E4: INTEGRITY MONITORING FOR NEXT GENERATION APPLICATIONS M. Azaola D. Calle A.Mozo
AN ALGORITHM FOR NETWORK REAL TIME KINEMATIC PROCESSING
 AN ALGORITHM FOR NETWORK REAL TIME KINEMATIC PROCESSING A. Malekzadeh*, J. Asgari, A. R. Amiri-Simkooei Dept. Geomatics, Faculty of Engineering, University of Isfahan, Isfahan, Iran - (Ardalan.Malekzadeh,
AN ALGORITHM FOR NETWORK REAL TIME KINEMATIC PROCESSING A. Malekzadeh*, J. Asgari, A. R. Amiri-Simkooei Dept. Geomatics, Faculty of Engineering, University of Isfahan, Isfahan, Iran - (Ardalan.Malekzadeh,
GAVIN DOCHERTY & CRAIG ROBERTS School of Surveying & Spatial Information Systems. University of NSW
 FIG2010, Sydney, Australia 15 April 2010 The impact of Solar Cycle 24 on Network RTK in Australia GAVIN DOCHERTY & CRAIG ROBERTS School of Surveying & Spatial Information Systems University of NSW School
FIG2010, Sydney, Australia 15 April 2010 The impact of Solar Cycle 24 on Network RTK in Australia GAVIN DOCHERTY & CRAIG ROBERTS School of Surveying & Spatial Information Systems University of NSW School
Positioning with Single and Dual Frequency Smartphones Running Android 7 or Later
 Positioning with Single and Dual Frequency Smartphones Running Android 7 or Later * René Warnant, *Laura Van De Vyvere, + Quentin Warnant * University of Liege Geodesy and GNSS + Augmenteo, Plaine Image,
Positioning with Single and Dual Frequency Smartphones Running Android 7 or Later * René Warnant, *Laura Van De Vyvere, + Quentin Warnant * University of Liege Geodesy and GNSS + Augmenteo, Plaine Image,
Comparative analysis of GNSS Real Time Kinematic methods for navigation
 IAV Hassan II Comparative analysis of GNSS Real Time Kinematic methods for navigation Mourad BOUZIANI School of Geomatic Sciences, IAV Hassan II, Rabat, Morocco. Coordinator of the Master - GNSS, IAV&
IAV Hassan II Comparative analysis of GNSS Real Time Kinematic methods for navigation Mourad BOUZIANI School of Geomatic Sciences, IAV Hassan II, Rabat, Morocco. Coordinator of the Master - GNSS, IAV&
GNSS Technologies. PPP and RTK
 PPP and RTK 29.02.2016 Content Carrier phase based positioning PPP RTK VRS Slides based on: GNSS Applications and Methods, by S. Gleason and D. Gebre-Egziabher (Eds.), Artech House Inc., 2009 http://www.gnssapplications.org/
PPP and RTK 29.02.2016 Content Carrier phase based positioning PPP RTK VRS Slides based on: GNSS Applications and Methods, by S. Gleason and D. Gebre-Egziabher (Eds.), Artech House Inc., 2009 http://www.gnssapplications.org/
The International Scene: How Precise Positioning Will Underpin Critical GNSS Applications
 The International Scene: How Precise Positioning Will Underpin Critical GNSS Applications School of Civil & Environmental Engineering, UNSW, Sydney, Australia Chris Rizos Member of the IGS Governing Board
The International Scene: How Precise Positioning Will Underpin Critical GNSS Applications School of Civil & Environmental Engineering, UNSW, Sydney, Australia Chris Rizos Member of the IGS Governing Board
Compact multi-gnss PPP corrections messages for transmission through a 250 bps channel
 Compact multi-gnss PPP corrections messages for transmission through a 250 bps channel Ken Harima, School of Science, RMIT University Suelynn Choy, School of Science, RMIT University Chris Rizos, School
Compact multi-gnss PPP corrections messages for transmission through a 250 bps channel Ken Harima, School of Science, RMIT University Suelynn Choy, School of Science, RMIT University Chris Rizos, School
SUPPORT OF NETWORK FORMATS BY TRIMBLE GPSNET NETWORK RTK SOLUTION
 SUPPORT OF NETWORK FORMATS BY TRIMBLE GPSNET NETWORK RTK SOLUTION TRIMBLE TERRASAT GMBH, HARINGSTRASSE 19, 85635 HOEHENKIRCHEN, GERMANY STATUS The Trimble GPSNet network RTK solution was first introduced
SUPPORT OF NETWORK FORMATS BY TRIMBLE GPSNET NETWORK RTK SOLUTION TRIMBLE TERRASAT GMBH, HARINGSTRASSE 19, 85635 HOEHENKIRCHEN, GERMANY STATUS The Trimble GPSNet network RTK solution was first introduced
Bernhard Hofnlann-Wellenhof Herbert Lichtenegger Elmar Wasle. GNSS - Global Navigation Satellite Systenls. GPS, GLONASS, Galileo, and nl0re
 Bernhard Hofnlann-Wellenhof Herbert Lichtenegger Elmar Wasle GNSS - Global Navigation Satellite Systenls GPS, GLONASS, Galileo, and nl0re SpringerWienNewYork Contents Abbreviations xxi 1 Introduction 1
Bernhard Hofnlann-Wellenhof Herbert Lichtenegger Elmar Wasle GNSS - Global Navigation Satellite Systenls GPS, GLONASS, Galileo, and nl0re SpringerWienNewYork Contents Abbreviations xxi 1 Introduction 1
New Tools for Network RTK Integrity Monitoring
 New Tools for Network RTK Integrity Monitoring Xiaoming Chen, Herbert Landau, Ulrich Vollath Trimble Terrasat GmbH BIOGRAPHY Dr. Xiaoming Chen is a software engineer at Trimble Terrasat. He holds a PhD
New Tools for Network RTK Integrity Monitoring Xiaoming Chen, Herbert Landau, Ulrich Vollath Trimble Terrasat GmbH BIOGRAPHY Dr. Xiaoming Chen is a software engineer at Trimble Terrasat. He holds a PhD
Development of an Open Source Multi GNSS Data Processing Software
 2nd Asia Oceania Regional Workshop on GNSS 2010 Development of an Open Source Multi GNSS Data Processing Software Tomoji TAKASU Tokyo University of Marine Science and Technology Contents Introduction Issues
2nd Asia Oceania Regional Workshop on GNSS 2010 Development of an Open Source Multi GNSS Data Processing Software Tomoji TAKASU Tokyo University of Marine Science and Technology Contents Introduction Issues
NTRIP Background History, Development & BKG. Networked Transport of RTCM via Internet Protocol
 Networked Transport of RTCM via Internet Protocol Networked Transport of RTCM via Internet Protocol Bundesamt für Kartographie und Geodäsie Motivation: Use Internet to transport GNSS corrections Communication
Networked Transport of RTCM via Internet Protocol Networked Transport of RTCM via Internet Protocol Bundesamt für Kartographie und Geodäsie Motivation: Use Internet to transport GNSS corrections Communication
A Novel Device for Autonomous Real-Time Precise Positioning with Global Coverage
 A Novel Device for Autonomous Real-Time Precise Positioning with Global Coverage D. Calle, P. Navarro, A. Mozo, R. Píriz, D. Rodríguez, G. Tobías. GMV, Spain BIOGRAPHY David Calle has a Master of Science
A Novel Device for Autonomous Real-Time Precise Positioning with Global Coverage D. Calle, P. Navarro, A. Mozo, R. Píriz, D. Rodríguez, G. Tobías. GMV, Spain BIOGRAPHY David Calle has a Master of Science
GNSS Low-Cost High-Accuracy Receiver (L-CHAR)
") GNSS Low-Cost High-Accuracy Receiver (L-CHAR) Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 High Accuracy Receivers
GNSS Low-Cost High-Accuracy Receiver (L-CHAR) Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 High Accuracy Receivers
UNIT 1 - introduction to GPS
 UNIT 1 - introduction to GPS 1. GPS SIGNAL Each GPS satellite transmit two signal for positioning purposes: L1 signal (carrier frequency of 1,575.42 MHz). Modulated onto the L1 carrier are two pseudorandom
UNIT 1 - introduction to GPS 1. GPS SIGNAL Each GPS satellite transmit two signal for positioning purposes: L1 signal (carrier frequency of 1,575.42 MHz). Modulated onto the L1 carrier are two pseudorandom
Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions
 Table of Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions page xiii xix xx xxi xxv Part I GNSS: orbits, signals, and methods 1 GNSS ground
Table of Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions page xiii xix xx xxi xxv Part I GNSS: orbits, signals, and methods 1 GNSS ground
ProMark 500 White Paper
 ProMark 500 White Paper How Magellan Optimally Uses GLONASS in the ProMark 500 GNSS Receiver How Magellan Optimally Uses GLONASS in the ProMark 500 GNSS Receiver 1. Background GLONASS brings to the GNSS
ProMark 500 White Paper How Magellan Optimally Uses GLONASS in the ProMark 500 GNSS Receiver How Magellan Optimally Uses GLONASS in the ProMark 500 GNSS Receiver 1. Background GLONASS brings to the GNSS
Introduction to GNSS
 Introduction to GNSS Dimitrios Bolkas, Ph.D. Department of Surveying Engineering, Pennsylvania State University, Wilkes Barre Campus PSLS Surveyor s Conference Hershey, PA Global Navigation Satellite System
Introduction to GNSS Dimitrios Bolkas, Ph.D. Department of Surveying Engineering, Pennsylvania State University, Wilkes Barre Campus PSLS Surveyor s Conference Hershey, PA Global Navigation Satellite System
Real-time PPP with ambiguity resolution Determination and Application of Uncalibrated Phase Delays
 Real-time PPP with ambiguity resolution Determination and Application of Uncalibrated Phase Delays K. Huber*, F. Hinterberger**, R. Lesjak*, R. Weber**, *Graz University of Technology, Institute of Navigation,
Real-time PPP with ambiguity resolution Determination and Application of Uncalibrated Phase Delays K. Huber*, F. Hinterberger**, R. Lesjak*, R. Weber**, *Graz University of Technology, Institute of Navigation,
GNSS Accuracy Improvements through Multipath Mitigation with New Signals and services
 GNSS Accuracy Improvements through Multipath Mitigation with New Signals and services Andrey Veytsel, Ph.D Moscow Technical University 10 Meeting of the International Committee on Global Navigation Satellite
GNSS Accuracy Improvements through Multipath Mitigation with New Signals and services Andrey Veytsel, Ph.D Moscow Technical University 10 Meeting of the International Committee on Global Navigation Satellite
Journal of Global Positioning Systems
 Vol. 7, No. 2, 2008 Journal of Global Positioning Systems ISSN 1446-3156 (Print Version) ISSN 1446-3164 (CD-ROM Version) International Association of Chinese Professionals in Global Positioning Systems
Vol. 7, No. 2, 2008 Journal of Global Positioning Systems ISSN 1446-3156 (Print Version) ISSN 1446-3164 (CD-ROM Version) International Association of Chinese Professionals in Global Positioning Systems
Ionospheric Corrections for GNSS
 Ionospheric Corrections for GNSS The Atmosphere and its Effect on GNSS Systems 14 to 16 April 2008 Santiago, Chile Ing. Roland Lejeune Overview Ionospheric delay corrections Core constellations GPS GALILEO
Ionospheric Corrections for GNSS The Atmosphere and its Effect on GNSS Systems 14 to 16 April 2008 Santiago, Chile Ing. Roland Lejeune Overview Ionospheric delay corrections Core constellations GPS GALILEO
IMO WORLDWIDE RADIONAVIGATION SYSTEM (WWRNS) Study on Communication Techniques for High Accuracy DGPS in the Republic of Korea
 Study on Communication Techniques for High Accuracy DGPS in the Republic of Korea") INTERNATIONAL MARITIME ORGANIZATION E IMO SUB-COMMITTEE ON SAFETY OF NAVIGATION 52nd session Agenda item 12 NAV 52/INF.8 12 May 2006 ENGLISH ONLY WORLDWIDE RADIONAVIGATION SYSTEM (WWRNS) Study on Communication
INTERNATIONAL MARITIME ORGANIZATION E IMO SUB-COMMITTEE ON SAFETY OF NAVIGATION 52nd session Agenda item 12 NAV 52/INF.8 12 May 2006 ENGLISH ONLY WORLDWIDE RADIONAVIGATION SYSTEM (WWRNS) Study on Communication
5G positioning and hybridization with GNSS observations
 5G positioning and hybridization with GNSS observations 1. Introduction Abstract The paradigm of ubiquitous location information has risen a requirement for hybrid positioning methods, as a continuous
5G positioning and hybridization with GNSS observations 1. Introduction Abstract The paradigm of ubiquitous location information has risen a requirement for hybrid positioning methods, as a continuous
Towards a EUREF Service Providing Real-time GNSS Clock and Orbit Corrections
 Towards a EUREF Service Providing Real-time GNSS Clock and Orbit Corrections G. Weber 1), W. Söhne 1), A. Stürze 1), L. Mervart 2) 1) Federal Agency for Cartography and Geodesy, Frankfurt am Main, Germany
Towards a EUREF Service Providing Real-time GNSS Clock and Orbit Corrections G. Weber 1), W. Söhne 1), A. Stürze 1), L. Mervart 2) 1) Federal Agency for Cartography and Geodesy, Frankfurt am Main, Germany
GNSS Ionosphere Analysis at CODE
 GNSS Ionosphere Analysis at CODE Stefan Schaer 2004 IGS Workshop Berne, Switzerland March 1-5 Time Series of Global Mean TEC Covering Nearly One Solar Cycle as Generated at CODE 1 Exceptionally High TEC
GNSS Ionosphere Analysis at CODE Stefan Schaer 2004 IGS Workshop Berne, Switzerland March 1-5 Time Series of Global Mean TEC Covering Nearly One Solar Cycle as Generated at CODE 1 Exceptionally High TEC
MAGICGNSS RTCM-BASED SERVICE, A LEAP FORWARD TOWARDS MULTI- GNSS HIGH ACCURACY REAL-TIME PROCESSING
 ION GNSS 2015 MAGICGNSS RTCM-BASED SERVICE, A LEAP FORWARD TOWARDS MULTI- GNSS HIGH ACCURACY REAL-TIME PROCESSING SEPTEMBER 16 TH, 2015 - ION GNSS 2015, TAMPA, FLORIDA, USA SESSION E2A: NEXT GENERATION
ION GNSS 2015 MAGICGNSS RTCM-BASED SERVICE, A LEAP FORWARD TOWARDS MULTI- GNSS HIGH ACCURACY REAL-TIME PROCESSING SEPTEMBER 16 TH, 2015 - ION GNSS 2015, TAMPA, FLORIDA, USA SESSION E2A: NEXT GENERATION
A GLONASS Observation Message Compatible With The Compact Measurement Record Format
 A GLONASS Observation Message Compatible With The Compact Measurement Record Format Leica Geosystems AG 1 Introduction Real-time kinematic (RTK) Global Navigation Satellite System (GNSS) positioning has
A GLONASS Observation Message Compatible With The Compact Measurement Record Format Leica Geosystems AG 1 Introduction Real-time kinematic (RTK) Global Navigation Satellite System (GNSS) positioning has
Bernese GPS Software 4.2
 Bernese GPS Software 4.2 Introduction Signal Processing Geodetic Use Details of modules Bernese GPS Software 4.2 Highest Accuracy GPS Surveys Research and Education Big Permanent GPS arrays Commercial
Bernese GPS Software 4.2 Introduction Signal Processing Geodetic Use Details of modules Bernese GPS Software 4.2 Highest Accuracy GPS Surveys Research and Education Big Permanent GPS arrays Commercial
SERVIR: The Portuguese Army CORS Network for RTK
 SERVIR: The Portuguese Army CORS Network for RTK António Jaime Gago AFONSO, Rui Francisco da Silva TEODORO and Virgílio Brito MENDES, Portugal Key words: GNSS, RTK, VRS, Network ABSTRACT Traditionally
SERVIR: The Portuguese Army CORS Network for RTK António Jaime Gago AFONSO, Rui Francisco da Silva TEODORO and Virgílio Brito MENDES, Portugal Key words: GNSS, RTK, VRS, Network ABSTRACT Traditionally
Trimble GPSNet 2.5 Software for GNSS Infrastructure: New Features. Martin Janousek - Trimble Technical Support - Infrastructure
 Trimble GPSNet 2.5 Software for GNSS Infrastructure: New Features Martin Janousek - Trimble Technical Support - Infrastructure GPSNet Users Seminar Munich, March 30 th /31 th 2006 Overview Support for
Trimble GPSNet 2.5 Software for GNSS Infrastructure: New Features Martin Janousek - Trimble Technical Support - Infrastructure GPSNet Users Seminar Munich, March 30 th /31 th 2006 Overview Support for
SPEEDING UP FILTER CONVERGENCE IN HIGH PRECISION, VERY LARGE AREA KINEMATIC NAVIGATION
 IMA HOT TOPICS WORKSHOP: Mathematical Challenges in Global Positioning Systems (GPS) University of Minnessota, 16-19 August 2000 SPEEDING UP FILTER CONVERGENCE IN HIGH PRECISION, VERY LARGE AREA KINEMATIC
IMA HOT TOPICS WORKSHOP: Mathematical Challenges in Global Positioning Systems (GPS) University of Minnessota, 16-19 August 2000 SPEEDING UP FILTER CONVERGENCE IN HIGH PRECISION, VERY LARGE AREA KINEMATIC
Real-time RTK messages for permanent reference station applications standardized by RTCM. Dr.-Ing. Hans-Juergen Euler Leica Research Fellow
 Real-time RTK messages for permanent reference station applications standardized by RTCM Dr.-Ing. Hans-Juergen Euler Leica Research Fellow Permanent Station Arrays Arrays with Permanent Stations are established
Real-time RTK messages for permanent reference station applications standardized by RTCM Dr.-Ing. Hans-Juergen Euler Leica Research Fellow Permanent Station Arrays Arrays with Permanent Stations are established
Performances of Modernized GPS and Galileo in Relative Positioning with weighted ionosphere Delays
 Agence Spatiale Algérienne Centre des Techniques Spatiales Agence Spatiale Algérienne Centre des Techniques Spatiales الوكالة الفضائية الجزائرية مركز للتقنيات الفضائية Performances of Modernized GPS and
Agence Spatiale Algérienne Centre des Techniques Spatiales Agence Spatiale Algérienne Centre des Techniques Spatiales الوكالة الفضائية الجزائرية مركز للتقنيات الفضائية Performances of Modernized GPS and
Introduction to GNSS
 Introduction to GNSS Dimitrios Bolkas, Ph.D. Department of Surveying Engineering, Pennsylvania State University, Wilkes Barre Campus PSLS Surveyor s Conference January 21-24, 2018 Hershey, PA Global Navigation
Introduction to GNSS Dimitrios Bolkas, Ph.D. Department of Surveying Engineering, Pennsylvania State University, Wilkes Barre Campus PSLS Surveyor s Conference January 21-24, 2018 Hershey, PA Global Navigation
When do you expect Athena to be available for VS330? This is currently being beta-tested and will be released in the very near future.
 Why Athena? Athena GNSS Engine What improvements does Athena offer over the RTK firmware I m running now? Compared to the Hemisphere firmware most users are currently using (Qf4), there are significant
Why Athena? Athena GNSS Engine What improvements does Athena offer over the RTK firmware I m running now? Compared to the Hemisphere firmware most users are currently using (Qf4), there are significant
GLONASS-based Single-Frequency Static- Precise Point Positioning
 GLONASS-based Single-Frequency Static- Precise Point Positioning Ashraf Farah College of Engineering Aswan University Aswan, Egypt e-mail: ashraf_farah@aswu.edu.eg Abstract Precise Point Positioning (PPP)
GLONASS-based Single-Frequency Static- Precise Point Positioning Ashraf Farah College of Engineering Aswan University Aswan, Egypt e-mail: ashraf_farah@aswu.edu.eg Abstract Precise Point Positioning (PPP)
Geo++'s Experiments on Android GNSS Raw Data
 Geo++'s Experiments on Android GNSS Raw Data Temmo Wübbena, Francesco Darugna, Akira Ito, Jannes Wübbena Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Outline SSRPOST concept Android Applications Absolute
Geo++'s Experiments on Android GNSS Raw Data Temmo Wübbena, Francesco Darugna, Akira Ito, Jannes Wübbena Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Outline SSRPOST concept Android Applications Absolute
NYSNET 11/28/2014 GPS/GLONASS (GG) January 2015 NYSAPLS Conference
 January 2015 NYSAPLS Conference") GPS/GLONASS (GG) January 2015 NYSAPLS Conference 2015 1 NYSNet 2015 GLONASS Upgrades Antenna Types Single Base/Network RTK GPS/GLONASS (GG) Single Base GPS/GLONASS (GG) Network RTK RT Products (NTRIP Mount
GPS/GLONASS (GG) January 2015 NYSAPLS Conference 2015 1 NYSNet 2015 GLONASS Upgrades Antenna Types Single Base/Network RTK GPS/GLONASS (GG) Single Base GPS/GLONASS (GG) Network RTK RT Products (NTRIP Mount
Integer Ambiguity Resolution in Precise Point Positioning: Method Comparison and Real-Time Application
 Integer Ambiguity Resolution in Precise Point Positioning: Method Comparison and Real-Time Application Jianghui Geng 1,2, Norman Teferle 3, Denis Laurichesse 4, Furqan Ahmed 3, Xiaolin Meng 1, Alan Dodson
Integer Ambiguity Resolution in Precise Point Positioning: Method Comparison and Real-Time Application Jianghui Geng 1,2, Norman Teferle 3, Denis Laurichesse 4, Furqan Ahmed 3, Xiaolin Meng 1, Alan Dodson
Some of the proposed GALILEO and modernized GPS frequencies.
 On the selection of frequencies for long baseline GALILEO ambiguity resolution P.J.G. Teunissen, P. Joosten, C.D. de Jong Department of Mathematical Geodesy and Positioning, Delft University of Technology,
On the selection of frequencies for long baseline GALILEO ambiguity resolution P.J.G. Teunissen, P. Joosten, C.D. de Jong Department of Mathematical Geodesy and Positioning, Delft University of Technology,
Compact multi-gnss PPP corrections messages for transmission through a 250 bps channel
 International Global Navigation Satellite Systems Association IGNSS Symposium 2018 Colombo Theatres, Kensington Campus, UNSW Australia 7 9 February 2018 Compact multi-gnss PPP corrections messages for
International Global Navigation Satellite Systems Association IGNSS Symposium 2018 Colombo Theatres, Kensington Campus, UNSW Australia 7 9 February 2018 Compact multi-gnss PPP corrections messages for
The Reasons to Succeed or to Fail a GNSS Network RTK Project
 The Reasons to Succeed or to Fail a GNSS Network RTK Project Joël van Cranenbroeck, Managing Director CGEOS Creative Geosensing sprl-s, Belgium Andy Yin, International Sales Director ComNav Technology
The Reasons to Succeed or to Fail a GNSS Network RTK Project Joël van Cranenbroeck, Managing Director CGEOS Creative Geosensing sprl-s, Belgium Andy Yin, International Sales Director ComNav Technology
CODE. L. Prange, R. Dach, S. Schaer, S. Lutz, A. Jäggi
 source: https://doi.org/10.7892/boris.44252 downloaded: 13.3.2017 Experiences with IGS MGEX data analysis at CODE. L. Prange, R. Dach, S. Schaer, S. Lutz, A. Jäggi Astronomical Institute, University of
source: https://doi.org/10.7892/boris.44252 downloaded: 13.3.2017 Experiences with IGS MGEX data analysis at CODE. L. Prange, R. Dach, S. Schaer, S. Lutz, A. Jäggi Astronomical Institute, University of
An Open-source PPP Client Implementation for the CNES PPP-WIZARD Demonstrator
 An Open-source PPP Client Implementation for the CNS PPP-WIZARD Demonstrator D. Laurichesse, Centre National d tudes Spatiales, Toulouse, France A.Privat, CS-SI, Toulouse, France BIOGRAPHY Denis Laurichesse
An Open-source PPP Client Implementation for the CNS PPP-WIZARD Demonstrator D. Laurichesse, Centre National d tudes Spatiales, Toulouse, France A.Privat, CS-SI, Toulouse, France BIOGRAPHY Denis Laurichesse
Accuracy Evaluation Internet-Based GNSS for Kinematic Surveying the Case Study in Thailand
 Accuracy Evaluation Internet-Based GNSS for Kinematic Surveying the Case Study in Thailand Kritsada Anantakarn 1 1 Faculty of Engineering and Architectural : Uthenthawai campus. Rajamongala University
Accuracy Evaluation Internet-Based GNSS for Kinematic Surveying the Case Study in Thailand Kritsada Anantakarn 1 1 Faculty of Engineering and Architectural : Uthenthawai campus. Rajamongala University
A Distribution Method of High Precise Differential Corrections for a Network Beidou/RTK System Based on Vehicular Networks
 BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 15, No 5 Special Issue on Control in Transportation Systems Sofia 215 Print ISSN: 1311-972; Online ISSN: 1314-481 DOI: 1.1515/cait-215-24
BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 15, No 5 Special Issue on Control in Transportation Systems Sofia 215 Print ISSN: 1311-972; Online ISSN: 1314-481 DOI: 1.1515/cait-215-24
A Differential Reference Station Algorithm For Modular Decentralized GPS/GNSS Master Station Architecture. Oct. 28, 2010
 212-1-29 International Symposium on GPS/GNSS 21 Oct. 26-28, National Cheng Kung Univ., Taiwan A Differential Reference Station Algorithm For Modular Decentralized GPS/GNSS Master Station Architecture Oct.
212-1-29 International Symposium on GPS/GNSS 21 Oct. 26-28, National Cheng Kung Univ., Taiwan A Differential Reference Station Algorithm For Modular Decentralized GPS/GNSS Master Station Architecture Oct.
magicgnss: QUALITY DATA, ALGORITHMS AND PRODUCTS FOR THE GNSS USER COMMUNITY
 SEMANA GEOMATICA 2009 magicgnss: QUALITY DATA, ALGORITHMS AND PRODUCTS FOR THE GNSS USER COMMUNITY MARCH 3, 2009 BARCELONA, SPAIN SESSION: GNSS PRODUCTS A. Mozo P. Navarro R. Píriz D. Rodríguez March 3,
SEMANA GEOMATICA 2009 magicgnss: QUALITY DATA, ALGORITHMS AND PRODUCTS FOR THE GNSS USER COMMUNITY MARCH 3, 2009 BARCELONA, SPAIN SESSION: GNSS PRODUCTS A. Mozo P. Navarro R. Píriz D. Rodríguez March 3,
Is neo-cadastral surveying on your smartphone feasible?
 Is neo-cadastral surveying on your smartphone feasible? School of Civil & Environmental Engineering Craig Roberts UNSW Paul Davis-Raiss, David Lofberg, Greg Goodman LandTeam Van der Vlugt, 2012 1 Cadastral
Is neo-cadastral surveying on your smartphone feasible? School of Civil & Environmental Engineering Craig Roberts UNSW Paul Davis-Raiss, David Lofberg, Greg Goodman LandTeam Van der Vlugt, 2012 1 Cadastral
Enhancing global PPP with Local Ionospheric Corrections
 Enhancing global PPP with Local Ionospheric Corrections Suelynn Choy 1, Ken Harima 1, Satoshi Kogure 2 1 School of Mathematical and Geospatial Sciences, RMIT University, Australia 2 Satellite Navigation
Enhancing global PPP with Local Ionospheric Corrections Suelynn Choy 1, Ken Harima 1, Satoshi Kogure 2 1 School of Mathematical and Geospatial Sciences, RMIT University, Australia 2 Satellite Navigation
Analysis on the Potential Performance of GPS and Galileo Precise Point Positioning using. Francesco Basile, Terry Moore, Chris Hill
 Analysis on the Potential Performance of GPS and Galileo Precise Point Positioning using simulated Real-Time products. Francesco Basile, Terry Moore, Chris Hill Nottingham Geospatial Institute, University
Analysis on the Potential Performance of GPS and Galileo Precise Point Positioning using simulated Real-Time products. Francesco Basile, Terry Moore, Chris Hill Nottingham Geospatial Institute, University
One Source for Positioning Success
 novatel.com One Source for Positioning Success RTK, PPP, SBAS OR DGNSS. NOVATEL CORRECT OPTIMIZES ALL CORRECTION SOURCES, PUTTING MORE POWER, FLEXIBILITY AND CONTROL IN YOUR HANDS. NovAtel CORRECT is the
novatel.com One Source for Positioning Success RTK, PPP, SBAS OR DGNSS. NOVATEL CORRECT OPTIMIZES ALL CORRECTION SOURCES, PUTTING MORE POWER, FLEXIBILITY AND CONTROL IN YOUR HANDS. NovAtel CORRECT is the
ProMark 3 RTK. White Paper
 ProMark 3 RTK White Paper Table of Contents 1. Introduction... 1 2. ProMark3 RTK Operational Environment... 2 3. BLADE TM : A Unique Magellan Technology for Quicker Convergence... 3 4. ProMark3 RTK Fixed
ProMark 3 RTK White Paper Table of Contents 1. Introduction... 1 2. ProMark3 RTK Operational Environment... 2 3. BLADE TM : A Unique Magellan Technology for Quicker Convergence... 3 4. ProMark3 RTK Fixed
Multi-GNSS real-time troposphere delay estimation
 Multi-GNSS real-time troposphere delay estimation Jaroslaw Bosy, Tomasz Hadas, Jak Kaplon, Kamil Kazmierski The 7th China Satellite Navigation Conference, May 18-20 Changsha China, Session S1: BDS/GNSS
Multi-GNSS real-time troposphere delay estimation Jaroslaw Bosy, Tomasz Hadas, Jak Kaplon, Kamil Kazmierski The 7th China Satellite Navigation Conference, May 18-20 Changsha China, Session S1: BDS/GNSS
Study and analysis of Differential GNSS and Precise Point Positioning
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 9, Issue 2 Ver. I (Mar Apr. 2014), PP 53-59 Study and analysis of Differential GNSS and Precise
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 9, Issue 2 Ver. I (Mar Apr. 2014), PP 53-59 Study and analysis of Differential GNSS and Precise
Global Products for GPS Point Positioning Approaching Real-Time
 Global Products for GPS Point Positioning Approaching Real-Time Y. Gao 1, P. Heroux 2 and M. Caissy 2 1 Department of Geomatics Engineering, University of Calgary 2 Geodetic Survey Division, Natural Resources
Global Products for GPS Point Positioning Approaching Real-Time Y. Gao 1, P. Heroux 2 and M. Caissy 2 1 Department of Geomatics Engineering, University of Calgary 2 Geodetic Survey Division, Natural Resources
Uncovering common misconceptions in GNSS Precise Point Positioning and its future prospect
 GPS Solut (217) 21:13 22 DOI 1.17/s1291-16-545-x REVIEW ARTICLE Uncovering common misconceptions in GNSS Precise Point Positioning and its future prospect Suelynn Choy 1 Sunil Bisnath 2 Chris Rizos 3 Received:
GPS Solut (217) 21:13 22 DOI 1.17/s1291-16-545-x REVIEW ARTICLE Uncovering common misconceptions in GNSS Precise Point Positioning and its future prospect Suelynn Choy 1 Sunil Bisnath 2 Chris Rizos 3 Received:
Multi-Constellation GNSS Precise Point Positioning using GPS, GLONASS and BeiDou in Australia
 International Global Navigation Satellite Systems Society IGNSS Symposium 2015 Multi-Constellation GNSS Precise Point Positioning using GPS, GLONASS and BeiDou in Australia Xiaodong Ren 1,Suelynn Choy
International Global Navigation Satellite Systems Society IGNSS Symposium 2015 Multi-Constellation GNSS Precise Point Positioning using GPS, GLONASS and BeiDou in Australia Xiaodong Ren 1,Suelynn Choy
Precise GNSS Positioning for Mass-market Applications
 Precise GNSS Positioning for Mass-market Applications Yang GAO, Canada Key words: GNSS, Precise GNSS Positioning, Precise Point Positioning (PPP), Correction Service, Low-Cost GNSS, Mass-Market Application
Precise GNSS Positioning for Mass-market Applications Yang GAO, Canada Key words: GNSS, Precise GNSS Positioning, Precise Point Positioning (PPP), Correction Service, Low-Cost GNSS, Mass-Market Application
Analysis of GNSS Receiver Biases and Noise using Zero Baseline Techniques
 1 Analysis of GNSS Receiver Biases and Noise using Zero Baseline Techniques Ken MacLeod, Simon Banville, Reza Ghoddousi-Fard and Paul Collins Canadian Geodetic Survey, Natural Resources Canada Plenary
1 Analysis of GNSS Receiver Biases and Noise using Zero Baseline Techniques Ken MacLeod, Simon Banville, Reza Ghoddousi-Fard and Paul Collins Canadian Geodetic Survey, Natural Resources Canada Plenary
CHAPTER 2 GPS GEODESY. Estelar. The science of geodesy is concerned with the earth by quantitatively
 CHAPTER 2 GPS GEODESY 2.1. INTRODUCTION The science of geodesy is concerned with the earth by quantitatively describing the coordinates of each point on the surface in a global or local coordinate system.
CHAPTER 2 GPS GEODESY 2.1. INTRODUCTION The science of geodesy is concerned with the earth by quantitatively describing the coordinates of each point on the surface in a global or local coordinate system.