MGEX Clock Determination at CODE
|
|
|
- Emily Little
- 5 years ago
- Views:
Transcription
1 source: downloaded: MGEX Clock Determination at CODE E. Orliac, L. Prange, R. Dach, S. Schaer and A. Jäggi Astronomical Institute of University of Bern (AIUB) Bern, Switzerland IGS Workshop on GNSS Biases 5 6 November 2015 University of Bern, Switzerland contact: etienne.orliac@aiub.unibe.ch
2 Presentation Outline Overview of CODE MGEX orbit and clock solutions Bias handling in the clock estimation Inter-system biases stability Conclusions and outlook Slide 2
3 CODE MGEX Orbit Solution GNSS considered: GPS + GLONASS + Galileo + BeiDou (MEO+IGSO) + QZSS (70 SV) Processing mode: post-processing / 2 weeks delay (since 2015) Timespan covered: GPS-weeks today Number of stations: 130 (GPS), 110 (GLONASS), 85 (Galileo); 55 (BeiDou); 20 (QZSS) Processing scheme: double-difference network processing (observable: phase double differences) Signal frequencies: L1+ L2 (GPS + GLO+ QZSS); E1 (L1) + E5a (L5) GAL; B1 (L1) + B2 (L7) BeiDou Orbit characteristic: 3-day long arcs; RPR: ECOM / ECOM2 (since 2015) Reference frame: IGS08 (until week 1708); IGb08 (since week 1709) IERS conventions: IERS2003 (until 1705); IERS2010 (since 1706) Product list: daily orbits (SP3) and ERPs Distribution: Designator: ftp://cddis.gsfc.nasa.gov/gnss/products/mgex/ comwwwwd.???.z Slide 3
4 CODE MGEX Clock Solution GNSS considered: GPS + GLONASS + Galileo + BeiDou + QZSS (70 SV) Processing mode: post-processing / 2 weeks delay (since 2015) Timespan covered: Number of stations: Processing scheme: Signal frequencies: A priori information: Reference frame: IERS conventions: Product list: Distribution: Designator: GPS-weeks today 130 (GPS), 35 (GLO), 45 (Galileo); 50 (BeiDou); 20 (QZSS) zero-difference network processing (observable: code+phase undifferenced) L1+ L2 (GPS + GLO+ QZSS); E1 (L1) + E5a (L5) GAL; B1 (L1) + B2 (L7) BeiDou orbits, ERPs, coordinates, and troposphere from CODE MGEX orbit solution introduced as known IGb08 IERS2010 epoch-wise (300s) satellite and station clock corrections in daily clock RINEX files; daily inter-system biases for mixed stations in Bernese DCB and BIAS-SINEX (BIA) format ftp://cddis.gsfc.nasa.gov/gnss/products/mgex/ comwwwwd.???.z Slide 4
5 CODE MGEX solutions Stations providing RINEX3 included in CODE s data monitoring Slide 5
6 Biases handling in the clock procedure Inter-system biases (ISB) are setup for each station and GNSS ISBs are the lumped sum of: Systems time difference DCBs Inter-frequency biases (specific to GLONASS) Each GLONASS satellite is treated as an individual system ISBs are estimated session-wise (daily) For each GNSS, a zero-mean condition is applied over all tracking stations => Investigate the time variability of these ISBs Slide 6
7 ISB reference unification ISB reference realized with a zero-mean condition each day for each system ISB daily references need therefore to be unified first Achieved by selecting a reference station for each GNSS and assume constant (zero) ISB over time + Most stable station can be selected + Not affected by less stable stations - The selected station has to be available on each day - Any artefact contained in the reference will be transfered to all others stations => may be necessary to select different references on subintervals Slide 7
8 ISB reference unification But the high variability in of the sub-networks observing each GNSS prevented to identify acceptable reference ISB over long periods After some iterations, the full year was divided in 15-day periods over which a reference is chosen for each GNSS Over each period the reference ISB site is chosen as the one that minimizes the sum of the RMS of the others. Slide 8
9 ISB reference unification Even on 15-day periods, the situation is not always comfortable in terms of pool of potential reference sites Slide 9
10 ISB reference unification To relax the system uncomplete references were added to have a least 5 potential references to chose from. Slide 10
11 Events in ISB time series Time series were splitted in case of receiver swap. Firmware upgrades (according to sitelogs) may impact the timeseries, but not systematically 6 stations equipped with TRIMBLE NETR9 with same firmware upgrade from version 4.80 to Since impractible to examine individually the time series, a generic screening was performed. Note that a jump only impacts the periods it belongs to. Slide 11

12 CODE MGEX Station with hardware/firmware changes in 2014 Slide 12




13 Stacked ISB time series Slide 13
14 ISB stability: overview Galileo & QZSS have 75 % of their stations below the overall median (0.476 ns). Apart from GLONASS R_715, all systems have their median value close to that of the overall median. Still apart R_715, the minimum values are similar over all systems. R_736 shows largest ISB stability spread. Slide 14

15 ISB stability over receiver types ISB per brand and type No dependency observed No dependency either on time series length Some predominant receiver types R_715 and R_736 generally represent the least stable systems for GLONASS tracking stations Slide 15

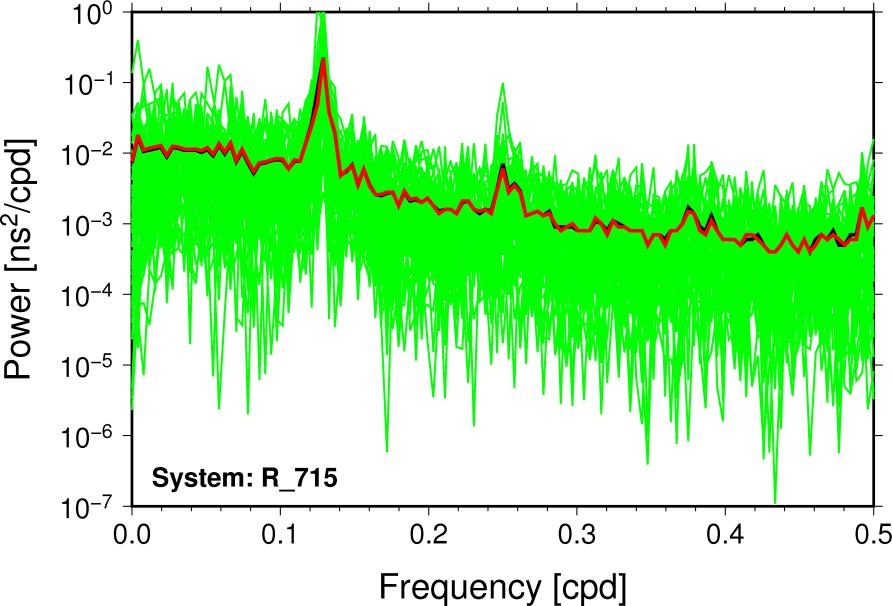

16 ISB periodicities 7d 8d 10 d Slide 16
17 Building long clock time series: Galileo Slide 17
18 Building long clock time series: BeiDou Slide 18
19 Building long clock time series: QZSS Slide 19
20 Conclusions and outlook The short-term variation of the ISBs was assessed for the four GNSSs considered on top of GPS Overall consistent performances over the systems, apart from R_715 Periodic variations were found in the time series Jumps/outliers in time series remain to be understood Slide 20
21 Thank you for your attention! Slide 21
CODE. L. Prange, R. Dach, S. Schaer, S. Lutz, A. Jäggi
 source: https://doi.org/10.7892/boris.44252 downloaded: 13.3.2017 Experiences with IGS MGEX data analysis at CODE. L. Prange, R. Dach, S. Schaer, S. Lutz, A. Jäggi Astronomical Institute, University of
source: https://doi.org/10.7892/boris.44252 downloaded: 13.3.2017 Experiences with IGS MGEX data analysis at CODE. L. Prange, R. Dach, S. Schaer, S. Lutz, A. Jäggi Astronomical Institute, University of
GFZ Analysis Centre: Multi-GNSS Processing and Products
 GFZ Analysis Centre: Multi-GNSS Processing and Products Mathias Fritsche, Zhiguo Deng, Maik Uhlemann,Thomas Nischan, Markus Bradke, Markus Ramatschi, Andre Brand, Gerda Beeskow DeutschesGeoforschungsZentrum
GFZ Analysis Centre: Multi-GNSS Processing and Products Mathias Fritsche, Zhiguo Deng, Maik Uhlemann,Thomas Nischan, Markus Bradke, Markus Ramatschi, Andre Brand, Gerda Beeskow DeutschesGeoforschungsZentrum
Multi-GNSS / Multi-Signal code bias determination from raw GNSS observations
 Multi-GNSS / Multi-Signal code bias determination from raw GNSS observations F. Reckeweg, E. Schönemann, T. Springer, M. Becker, W. Enderle Geodätische Woche 2016 InterGEO 11.-13. October 2016 Hamburg,
Multi-GNSS / Multi-Signal code bias determination from raw GNSS observations F. Reckeweg, E. Schönemann, T. Springer, M. Becker, W. Enderle Geodätische Woche 2016 InterGEO 11.-13. October 2016 Hamburg,
GNSS orbits and ERPs from CODE s repro2 solutions
 GNSS orbits and ERPs from CODE s repro2 solutions S. Lutz 1, P. Steigenberger 2, G. Beutler 1, S. Schaer 3, R. Dach 1, A. Jäggi 1 1 Astronomical Institute of the University of Bern, Bern, Switzerland 2
GNSS orbits and ERPs from CODE s repro2 solutions S. Lutz 1, P. Steigenberger 2, G. Beutler 1, S. Schaer 3, R. Dach 1, A. Jäggi 1 1 Astronomical Institute of the University of Bern, Bern, Switzerland 2
INTEROPERABILITY OF THE GNSS'S FOR POSITIONING AND TIMING. A. Caporali, L. Nicolini University of Padova, Italy
 INTEROPERABILITY OF THE GNSS'S FOR POSITIONING AND TIMING A. Caporali, L. Nicolini University of Padova, Italy Outlook Monitor 31 European GNSS sites with 5 different receivers (Javad, Leica, Septentrio,
INTEROPERABILITY OF THE GNSS'S FOR POSITIONING AND TIMING A. Caporali, L. Nicolini University of Padova, Italy Outlook Monitor 31 European GNSS sites with 5 different receivers (Javad, Leica, Septentrio,
GNSS Analysis with Galileo Observations in the Subnetwork of the BEK Analysis Centre
 GNSS Analysis with Galileo Observations in the Subnetwork of the BEK Analysis Centre Christof Völksen Bavarian Academy of Sciences and Humanities (BAdW) Tomasz Liwosz Warsaw University of Technology, Warsaw,
GNSS Analysis with Galileo Observations in the Subnetwork of the BEK Analysis Centre Christof Völksen Bavarian Academy of Sciences and Humanities (BAdW) Tomasz Liwosz Warsaw University of Technology, Warsaw,
Multi-GNSS differential code biases (DCBs) estimation within MGEX
 estimation within MGEX") Multi-GNSS differential code biases (DCBs) estimation within MGEX Ningbo Wang 1, Yunbin Yuan 1, Zishen Li 2, Oliver Montenbruck 3 1 Institute Institute of Geodesy and Geophysics (IGG), CAS 2 Academy of
Multi-GNSS differential code biases (DCBs) estimation within MGEX Ningbo Wang 1, Yunbin Yuan 1, Zishen Li 2, Oliver Montenbruck 3 1 Institute Institute of Geodesy and Geophysics (IGG), CAS 2 Academy of
GNSS Ionosphere Analysis at CODE
 GNSS Ionosphere Analysis at CODE Stefan Schaer 2004 IGS Workshop Berne, Switzerland March 1-5 Time Series of Global Mean TEC Covering Nearly One Solar Cycle as Generated at CODE 1 Exceptionally High TEC
GNSS Ionosphere Analysis at CODE Stefan Schaer 2004 IGS Workshop Berne, Switzerland March 1-5 Time Series of Global Mean TEC Covering Nearly One Solar Cycle as Generated at CODE 1 Exceptionally High TEC
SLR residuals to GPS / GLONASS and combined GNSS-SLR analysis
 SLR residuals to GPS / GLONASS and combined GNSS-SLR analysis D. Thaller, K. Sośnica, R. Dach, A. Jäggi, C. Baumann Astronomical Institute, University of Bern, Switzerland International Technical Laser
SLR residuals to GPS / GLONASS and combined GNSS-SLR analysis D. Thaller, K. Sośnica, R. Dach, A. Jäggi, C. Baumann Astronomical Institute, University of Bern, Switzerland International Technical Laser
Multi-Constellation GNSS Precise Point Positioning using GPS, GLONASS and BeiDou in Australia
 International Global Navigation Satellite Systems Society IGNSS Symposium 2015 Multi-Constellation GNSS Precise Point Positioning using GPS, GLONASS and BeiDou in Australia Xiaodong Ren 1,Suelynn Choy
International Global Navigation Satellite Systems Society IGNSS Symposium 2015 Multi-Constellation GNSS Precise Point Positioning using GPS, GLONASS and BeiDou in Australia Xiaodong Ren 1,Suelynn Choy
COMPARISON BETWEEN BROADCAST AND PRECISE ORBITS: GPS GLONASS GALILEO AND BEIDOU. A. Caporali and L. Nicolini University of Padova, Italy
 COMPARISON BETWEEN BROADCAST AND PRECISE ORBITS: GPS GLONASS GALILEO AND BEIDOU A. Caporali and L. Nicolini University of Padova, Italy Summary Previous works Input data and method used Comparison between
COMPARISON BETWEEN BROADCAST AND PRECISE ORBITS: GPS GLONASS GALILEO AND BEIDOU A. Caporali and L. Nicolini University of Padova, Italy Summary Previous works Input data and method used Comparison between
Real-Time and Multi-GNSS Key Projects of the International GNSS Service
 Real-Time and Multi-GNSS Key Projects of the International GNSS Service Urs Hugentobler, Chris Rizos, Mark Caissy, Georg Weber, Oliver Montenbruck, Ruth Neilan EUREF 2013 Symposium Budapest, Hungary, May
Real-Time and Multi-GNSS Key Projects of the International GNSS Service Urs Hugentobler, Chris Rizos, Mark Caissy, Georg Weber, Oliver Montenbruck, Ruth Neilan EUREF 2013 Symposium Budapest, Hungary, May
Preparing for the Future The IGS in a Multi-GNSS World
 Preparing for the Future The IGS in a Multi-GNSS World O. Montenbruck DLR/GSOC 1 The International GNSS Service is a federation of more than 200 institutions and organizations worldwide a Service of the
Preparing for the Future The IGS in a Multi-GNSS World O. Montenbruck DLR/GSOC 1 The International GNSS Service is a federation of more than 200 institutions and organizations worldwide a Service of the
Precise positioning in multi-gnss mode
 Precise positioning in multi-gnss mode Novembre 2017 ± Compatibilities between GNSS Lower L-Band Upper L-Band E5a+b E1 E5a E5b E6 L1 L5 B2 B2 L2 B3 B1 B1 Frequency (Mhz) GPS Galileo BeiDou BeiDou BeiDou
Precise positioning in multi-gnss mode Novembre 2017 ± Compatibilities between GNSS Lower L-Band Upper L-Band E5a+b E1 E5a E5b E6 L1 L5 B2 B2 L2 B3 B1 B1 Frequency (Mhz) GPS Galileo BeiDou BeiDou BeiDou
MULTI-GNSS TIME TRANSFER
 MULTI-GNSS TIME TRANSFER Pascale Defraigne Royal Observatory of Belgium 1 OUTLINE Introduction GNSS Time Transfer Concept Instrumental aspect Multi-GNSS Requirements GPS-GLONASS experiment Galileo, Beidou:
MULTI-GNSS TIME TRANSFER Pascale Defraigne Royal Observatory of Belgium 1 OUTLINE Introduction GNSS Time Transfer Concept Instrumental aspect Multi-GNSS Requirements GPS-GLONASS experiment Galileo, Beidou:
BeiDou Orbit Determination Processes and Products in JPL's GDGPS System
 BeiDou Orbit Determination Processes and Products in JPL's GDGPS System Ant Sibthorpe, Yoaz Bar-Sever, Willy Bertiger, Wenwen Lu, Robert Meyer, Mark Miller and Larry Romans Outline GNSS (GPS/BDS) with
BeiDou Orbit Determination Processes and Products in JPL's GDGPS System Ant Sibthorpe, Yoaz Bar-Sever, Willy Bertiger, Wenwen Lu, Robert Meyer, Mark Miller and Larry Romans Outline GNSS (GPS/BDS) with
ESOC s Multi-GNSS Processing
 ESOC s Multi-GNSS Processing Cristina Garcia-Serrano, Tim Springer, Florian Dilssner, Claudia Flohrer, Erik Schönemann, Werner Enderle ESOC - Navigation Support Office, Darmstadt, Germany IGS Workshop
ESOC s Multi-GNSS Processing Cristina Garcia-Serrano, Tim Springer, Florian Dilssner, Claudia Flohrer, Erik Schönemann, Werner Enderle ESOC - Navigation Support Office, Darmstadt, Germany IGS Workshop
GNSS analysis software GSILIB for utilizing Multi- GNSS data
 Technical Seminar Reference Frame in Practice, GNSS analysis software GSILIB for utilizing Multi- GNSS data *Satoshi Kawamoto, Naofumi Takamatsu Geospatial Information Authority of Japan Sponsors: Geospatial
Technical Seminar Reference Frame in Practice, GNSS analysis software GSILIB for utilizing Multi- GNSS data *Satoshi Kawamoto, Naofumi Takamatsu Geospatial Information Authority of Japan Sponsors: Geospatial
Time Transfer with Integer PPP (IPPP) J. Delporte, F. Mercier, F. Perosanz (CNES) G. Petit (BIPM)
 J. Delporte, F. Mercier, F. Perosanz (CNES) G. Petit (BIPM)") Time Transfer with Integer PPP (IPPP) J. Delporte, F. Mercier, F. Perosanz (CNES) G. Petit (BIPM) Outline Time transfer GPS CP TT : advantages of integer ambiguity resolution GRG products Some results
Time Transfer with Integer PPP (IPPP) J. Delporte, F. Mercier, F. Perosanz (CNES) G. Petit (BIPM) Outline Time transfer GPS CP TT : advantages of integer ambiguity resolution GRG products Some results
Zero difference GPS ambiguity resolution at CNES-CLS IGS Analysis Center
 Zero difference GPS ambiguity resolution at CNES-CLS IGS Analysis Center S. Loyer, F. Perosanz, F. Mercier, H. Capdeville, J.C. Marty, F. Fund, P. Gegout 3, R. Biancale 08// G 0 ENSG, Marne-la-Vallée November
Zero difference GPS ambiguity resolution at CNES-CLS IGS Analysis Center S. Loyer, F. Perosanz, F. Mercier, H. Capdeville, J.C. Marty, F. Fund, P. Gegout 3, R. Biancale 08// G 0 ENSG, Marne-la-Vallée November
Enhancing the Swiss Permanent GPS Network (AGNES) for GLONASS
 for GLONASS") Enhancing the Swiss Permanent GPS Network (AGNES) for GLONASS D. INEICHEN, E. BROCKMANN, S. SCHAER 1 1 Abstract Since 1998 swisstopo has been operating the Automated GPS Network of Switzerland (AGNES)
Enhancing the Swiss Permanent GPS Network (AGNES) for GLONASS D. INEICHEN, E. BROCKMANN, S. SCHAER 1 1 Abstract Since 1998 swisstopo has been operating the Automated GPS Network of Switzerland (AGNES)
Originally published as:
 Originally published as: Ge, Y., Zhou, F., Sun, B., Wang, S., Shi, B. (2017): The Impact Satellite Time Group Delay Inter- Frequency Differential Code Bias Corrections on Multi-GNSS Combined Positioning.
Originally published as: Ge, Y., Zhou, F., Sun, B., Wang, S., Shi, B. (2017): The Impact Satellite Time Group Delay Inter- Frequency Differential Code Bias Corrections on Multi-GNSS Combined Positioning.
magicgnss: QUALITY DATA, ALGORITHMS AND PRODUCTS FOR THE GNSS USER COMMUNITY
 SEMANA GEOMATICA 2009 magicgnss: QUALITY DATA, ALGORITHMS AND PRODUCTS FOR THE GNSS USER COMMUNITY MARCH 3, 2009 BARCELONA, SPAIN SESSION: GNSS PRODUCTS A. Mozo P. Navarro R. Píriz D. Rodríguez March 3,
SEMANA GEOMATICA 2009 magicgnss: QUALITY DATA, ALGORITHMS AND PRODUCTS FOR THE GNSS USER COMMUNITY MARCH 3, 2009 BARCELONA, SPAIN SESSION: GNSS PRODUCTS A. Mozo P. Navarro R. Píriz D. Rodríguez March 3,
The International Scene: How Precise Positioning Will Underpin Critical GNSS Applications
 The International Scene: How Precise Positioning Will Underpin Critical GNSS Applications School of Civil & Environmental Engineering, UNSW, Sydney, Australia Chris Rizos Member of the IGS Governing Board
The International Scene: How Precise Positioning Will Underpin Critical GNSS Applications School of Civil & Environmental Engineering, UNSW, Sydney, Australia Chris Rizos Member of the IGS Governing Board
INTEROPERABILITY OF THE GNSS'S FOR POSITIONING AND TIMING. A. Caporali, L. Nicolini University of Padova, Italy
 INTEROPERABILITY OF THE GNSS'S FOR POSITIONING AND TIMING A. Caporali, L. Nicolini University of Padova, Italy Outlook Monitor 31 European GNSS sites with 5 different receivers (Javad, Leica, Septentrio,
INTEROPERABILITY OF THE GNSS'S FOR POSITIONING AND TIMING A. Caporali, L. Nicolini University of Padova, Italy Outlook Monitor 31 European GNSS sites with 5 different receivers (Javad, Leica, Septentrio,
Bernese GPS Software Version 4.2
 ASTRONOMICAL INSTITUTE UNIVERSITY OF BERNE Bernese GPS Software Version 4.2 Edited by U. Hugentobler, S. Schaer, P. Fridez Contributors: G. Beutler, H. Bock, E. Brockmann, R. Dach, P. Fridez, W. Gurtner,
ASTRONOMICAL INSTITUTE UNIVERSITY OF BERNE Bernese GPS Software Version 4.2 Edited by U. Hugentobler, S. Schaer, P. Fridez Contributors: G. Beutler, H. Bock, E. Brockmann, R. Dach, P. Fridez, W. Gurtner,
Issues Related to the Use of Absolute GPS/GLONASS PCV Models
 Bundesamt für Landestopografie Office fédéral de topographie Ufficio federale di topografia Uffizi federal da topografia Issues Related to the Use of Absolute GPS/GLONASS PCV Models S. Schaer 1, U. Hugentobler
Bundesamt für Landestopografie Office fédéral de topographie Ufficio federale di topografia Uffizi federal da topografia Issues Related to the Use of Absolute GPS/GLONASS PCV Models S. Schaer 1, U. Hugentobler
WHU s developments for the MGEX precise products and the GNSS ultra-rapid products
 IGS Workshop 2016 WHU s developments for the MGEX precise products and the GNSS ultra-rapid products Chuang Shi; Qile Zhao; Min Li; Jing Guo; Jingnan Liu Presented by Jianghui Geng GNSS Research Center,
IGS Workshop 2016 WHU s developments for the MGEX precise products and the GNSS ultra-rapid products Chuang Shi; Qile Zhao; Min Li; Jing Guo; Jingnan Liu Presented by Jianghui Geng GNSS Research Center,
Rapid Static Positioning Using GPS and GLONASS
 armasuisse Rapid Static Positioning Using GPS and GLONASS S. C. Schaer 1, E. Brockmann 1, M. Meindl 2 1 Swiss Federal Office of Topography (swisstopo) 2 Astronomical Institute of the University of Berne
armasuisse Rapid Static Positioning Using GPS and GLONASS S. C. Schaer 1, E. Brockmann 1, M. Meindl 2 1 Swiss Federal Office of Topography (swisstopo) 2 Astronomical Institute of the University of Berne
Analysis of GNSS Receiver Biases and Noise using Zero Baseline Techniques
 1 Analysis of GNSS Receiver Biases and Noise using Zero Baseline Techniques Ken MacLeod, Simon Banville, Reza Ghoddousi-Fard and Paul Collins Canadian Geodetic Survey, Natural Resources Canada Plenary
1 Analysis of GNSS Receiver Biases and Noise using Zero Baseline Techniques Ken MacLeod, Simon Banville, Reza Ghoddousi-Fard and Paul Collins Canadian Geodetic Survey, Natural Resources Canada Plenary
MAGICGNSS RTCM-BASED SERVICE, A LEAP FORWARD TOWARDS MULTI- GNSS HIGH ACCURACY REAL-TIME PROCESSING
 ION GNSS 2015 MAGICGNSS RTCM-BASED SERVICE, A LEAP FORWARD TOWARDS MULTI- GNSS HIGH ACCURACY REAL-TIME PROCESSING SEPTEMBER 16 TH, 2015 - ION GNSS 2015, TAMPA, FLORIDA, USA SESSION E2A: NEXT GENERATION
ION GNSS 2015 MAGICGNSS RTCM-BASED SERVICE, A LEAP FORWARD TOWARDS MULTI- GNSS HIGH ACCURACY REAL-TIME PROCESSING SEPTEMBER 16 TH, 2015 - ION GNSS 2015, TAMPA, FLORIDA, USA SESSION E2A: NEXT GENERATION
Consistency of parameters derived from global SLR, VLBI and GNSS solutions when using non-tidal loading deformation on the observation level
 Consistency of parameters derived from global SLR, VLBI and GNSS solutions when using non-tidal loading deformation on the observation level Ole Roggenbuck (1), D. Thaller (1), G. Engelhardt (1), R. Dach
Consistency of parameters derived from global SLR, VLBI and GNSS solutions when using non-tidal loading deformation on the observation level Ole Roggenbuck (1), D. Thaller (1), G. Engelhardt (1), R. Dach
ORBITS AND CLOCKS FOR GLONASS PPP
 ION GNSS 2009 ORBITS AND CLOCKS FOR GLONASS PPP SEPTEMBER 22-25, 2009 - SAVANNAH, GEORGIA SESSION E3: PPP AND NETWORK-BASED RTK 1 D. Calle A. Mozo P. Navarro R. Píriz D. Rodríguez G. Tobías September 24,
ION GNSS 2009 ORBITS AND CLOCKS FOR GLONASS PPP SEPTEMBER 22-25, 2009 - SAVANNAH, GEORGIA SESSION E3: PPP AND NETWORK-BASED RTK 1 D. Calle A. Mozo P. Navarro R. Píriz D. Rodríguez G. Tobías September 24,
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey
 Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey 2 Improving Hydrographic PPP by Height Constraining Ashraf Abdallah (Egypt) Volker Schwieger, (Germany) ashraf.abdallah@aswu.edu.eg
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey 2 Improving Hydrographic PPP by Height Constraining Ashraf Abdallah (Egypt) Volker Schwieger, (Germany) ashraf.abdallah@aswu.edu.eg
Multi-GNSS real-time troposphere delay estimation
 Multi-GNSS real-time troposphere delay estimation Jaroslaw Bosy, Tomasz Hadas, Jak Kaplon, Kamil Kazmierski The 7th China Satellite Navigation Conference, May 18-20 Changsha China, Session S1: BDS/GNSS
Multi-GNSS real-time troposphere delay estimation Jaroslaw Bosy, Tomasz Hadas, Jak Kaplon, Kamil Kazmierski The 7th China Satellite Navigation Conference, May 18-20 Changsha China, Session S1: BDS/GNSS
Access from the University of Nottingham repository: %2088%
 Mohammed, J. and Moore, Terry and Hill, Chris and Bingley, R.M. and Hansen, D.N. (2016) An assessment of static Precise Point Positioning using GPS only, GLONASS only, and GPS plus GLONASS. Measurement,
Mohammed, J. and Moore, Terry and Hill, Chris and Bingley, R.M. and Hansen, D.N. (2016) An assessment of static Precise Point Positioning using GPS only, GLONASS only, and GPS plus GLONASS. Measurement,
Impact of GLONASS in a rigorous combination with GPS
 Fakultät Umweltwissenschaften Professur für Geodätische Erdsystemforschung source: https://doi.org/10.7892/boris.44677 downloaded: 13.3.2017 Session 1.2a Strength, Weakness, Modeling Standards and Processing
Fakultät Umweltwissenschaften Professur für Geodätische Erdsystemforschung source: https://doi.org/10.7892/boris.44677 downloaded: 13.3.2017 Session 1.2a Strength, Weakness, Modeling Standards and Processing
Triple Frequency precise point positioning with multi-constellation GNSS
 International Global Navigation Satellite Systems Association IGNSS Conference 2016 Colombo Theatres, Kensington Campus, UNSW Australia 6 8 December 2016 Triple Frequency precise point positioning with
International Global Navigation Satellite Systems Association IGNSS Conference 2016 Colombo Theatres, Kensington Campus, UNSW Australia 6 8 December 2016 Triple Frequency precise point positioning with
Multi-technique combination at observation level with NAPEOS
 Multi-technique combination at observation level with NAPEOS Michiel Otten, Claudia Flohrer, Tim Springer, Werner Enderle EGU General Assembly 2012 Vienna Austria 27/04/2012 Introduction Combination of
Multi-technique combination at observation level with NAPEOS Michiel Otten, Claudia Flohrer, Tim Springer, Werner Enderle EGU General Assembly 2012 Vienna Austria 27/04/2012 Introduction Combination of
Development of Multi-GNSS Orbit and Clock Determination Software "MADOCA"
 The 5th Asia Oceania Regional Workshop on GNSS Development of Multi-GNSS Orbit and Clock Determination Software "MADOCA" Tokyo Univ. of Marine Science and Technology Tomoji TAKASU December 1-3, 2013 @Hanoi
The 5th Asia Oceania Regional Workshop on GNSS Development of Multi-GNSS Orbit and Clock Determination Software "MADOCA" Tokyo Univ. of Marine Science and Technology Tomoji TAKASU December 1-3, 2013 @Hanoi
The Stability Analysis of GNSS Satellite DCB
 The Stability Analysis of GNSS Satellite DCB Shuli Song, Junchen Xue, Zhengbiao Zou ShangHai Astronomical Observatory 216-2-12 Sydeny Outline l Introduction l GPS DCB analysis l GLONASS DCB analysis l
The Stability Analysis of GNSS Satellite DCB Shuli Song, Junchen Xue, Zhengbiao Zou ShangHai Astronomical Observatory 216-2-12 Sydeny Outline l Introduction l GPS DCB analysis l GLONASS DCB analysis l
GNSS Low-Cost High-Accuracy Receiver (L-CHAR)
") GNSS Low-Cost High-Accuracy Receiver (L-CHAR) Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 High Accuracy Receivers
GNSS Low-Cost High-Accuracy Receiver (L-CHAR) Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 High Accuracy Receivers
Trimble Business Center:
 Trimble Business Center: Modernized Approaches for GNSS Baseline Processing Trimble s industry-leading software includes a new dedicated processor for static baselines. The software features dynamic selection
Trimble Business Center: Modernized Approaches for GNSS Baseline Processing Trimble s industry-leading software includes a new dedicated processor for static baselines. The software features dynamic selection
IGS Products for the Ionosphere
 1 IGS Products for the Ionosphere J. Feltens 1 and S. Schaer 2 1. EDS at Flight Dynamics Division, ESA, European Space Operations Centre, Robert-Bosch-Str. 5, D-64293 Darmstadt, Germany 2. Astronomical
1 IGS Products for the Ionosphere J. Feltens 1 and S. Schaer 2 1. EDS at Flight Dynamics Division, ESA, European Space Operations Centre, Robert-Bosch-Str. 5, D-64293 Darmstadt, Germany 2. Astronomical
Processing 20 years of SLR observations to GNSS satellites
 Processing 20 years of SLR observations to GNSS satellites K. Sośnica (1, 2), R. Dach (1), D. Thaller (3), A. Jäggi (1), G. Beutler (1), D. Arnold (1) (1) Astronomical Institute, University of Bern, Sidlerstrasse
Processing 20 years of SLR observations to GNSS satellites K. Sośnica (1, 2), R. Dach (1), D. Thaller (3), A. Jäggi (1), G. Beutler (1), D. Arnold (1) (1) Astronomical Institute, University of Bern, Sidlerstrasse
Development of an Open Source Multi GNSS Data Processing Software
 2nd Asia Oceania Regional Workshop on GNSS 2010 Development of an Open Source Multi GNSS Data Processing Software Tomoji TAKASU Tokyo University of Marine Science and Technology Contents Introduction Issues
2nd Asia Oceania Regional Workshop on GNSS 2010 Development of an Open Source Multi GNSS Data Processing Software Tomoji TAKASU Tokyo University of Marine Science and Technology Contents Introduction Issues
Key issues, recommendations, action items
 armasuisse Key issues, recommendations, action items Stefan Schaer Swiss Federal Office of Topography (swisstopo) / CODE@AIUB Key issues GLONASS bias calibration - biases relevant to GNSS receiver interoperability
armasuisse Key issues, recommendations, action items Stefan Schaer Swiss Federal Office of Topography (swisstopo) / CODE@AIUB Key issues GLONASS bias calibration - biases relevant to GNSS receiver interoperability
MULTI-GNSS TIME TRANSFER
 MULTI-GNSS TIME TRANSFER P. DEFRAIGNE Royal Observatory of Belgium Avenue Circulaire, 3, 118-Brussels e-mail: p.defraigne@oma.be ABSTRACT. Measurements from Global Navigation Satellite Systems (GNSS) are
MULTI-GNSS TIME TRANSFER P. DEFRAIGNE Royal Observatory of Belgium Avenue Circulaire, 3, 118-Brussels e-mail: p.defraigne@oma.be ABSTRACT. Measurements from Global Navigation Satellite Systems (GNSS) are
Combined Multi System GNSS Analysis for Time and Frequency Transfer
 Combined Multi System GNSS Analysis for Time and Frequency Transfer R. Dach, U. Hugentobler, T. Schildknecht, and A. Gaede rolf.dach@aiub.unibe.ch Astronomical Institute, University of Bern, Sidlerstrasse
Combined Multi System GNSS Analysis for Time and Frequency Transfer R. Dach, U. Hugentobler, T. Schildknecht, and A. Gaede rolf.dach@aiub.unibe.ch Astronomical Institute, University of Bern, Sidlerstrasse
PRECISE POINT POSITIONING USING COMBDINE GPS/GLONASS MEASUREMENTS
 PRECISE POINT POSITIONING USING COMBDINE GPS/GLONASS MEASUREMENTS Mohamed AZAB, Ahmed EL-RABBANY Ryerson University, Canada M. Nabil SHOUKRY, Ramadan KHALIL Alexandria University, Egypt Outline Introduction.
PRECISE POINT POSITIONING USING COMBDINE GPS/GLONASS MEASUREMENTS Mohamed AZAB, Ahmed EL-RABBANY Ryerson University, Canada M. Nabil SHOUKRY, Ramadan KHALIL Alexandria University, Egypt Outline Introduction.
Progress of igmas and
 2017 ICG-12 Progress of igmas and IGMA Joint Trial Project igmas TEAM Kyoto Japan 2th Dec. 2017 Contents 1. Introduction 2. Progress of IGMA Joint Trial Project 3. Reference for Monitoring and Assessment
2017 ICG-12 Progress of igmas and IGMA Joint Trial Project igmas TEAM Kyoto Japan 2th Dec. 2017 Contents 1. Introduction 2. Progress of IGMA Joint Trial Project 3. Reference for Monitoring and Assessment
IGS workshop 2018 Multi-GNSS through Global Collaboration Datum: 29 October - 2 November 2018 Plats: Wuhan, China Deltagare: Tong Ning (I0101)
") 2018-11-19 RESERAPPORT IGS workshop 2018 Multi-GNSS through Global Collaboration Datum: 29 October - 2 November 2018 Plats: Wuhan, China Deltagare: Tong Ning (I0101) Syfte med mötet The workshop programme
2018-11-19 RESERAPPORT IGS workshop 2018 Multi-GNSS through Global Collaboration Datum: 29 October - 2 November 2018 Plats: Wuhan, China Deltagare: Tong Ning (I0101) Syfte med mötet The workshop programme
Asia Oceania Regional Workshop on GNSS Precise Point Positioning Experiment by using QZSS LEX
 Asia Oceania Regional Workshop on GNSS 2010 Precise Point Positioning Experiment by using QZSS LEX Tomoji TAKASU Tokyo University of Marine Science and Technology Contents Introduction of QZSS LEX Evaluation
Asia Oceania Regional Workshop on GNSS 2010 Precise Point Positioning Experiment by using QZSS LEX Tomoji TAKASU Tokyo University of Marine Science and Technology Contents Introduction of QZSS LEX Evaluation
Assessment of the Contribution of QZSS Combined GPS/BeiDou Positioning in Asia-Pacific Areas
 Assessment of the Contribution of QZSS Combined GPS/BeiDou Positioning in Asia-Pacific Areas Yize Zhang, Nobuaki Kubo, Junping Chen, Hu Wang and Jiexian Wang Abstract Three QZSS satellites are launched
Assessment of the Contribution of QZSS Combined GPS/BeiDou Positioning in Asia-Pacific Areas Yize Zhang, Nobuaki Kubo, Junping Chen, Hu Wang and Jiexian Wang Abstract Three QZSS satellites are launched
The added value of new GNSS to monitor the ionosphere
 The added value of new GNSS to monitor the ionosphere R. Warnant 1, C. Deprez 1, L. Van de Vyvere 2 1 University of Liege, Liege, Belgium. 2 M3 System, Wavre, Belgium. Monitoring TEC for geodetic applications
The added value of new GNSS to monitor the ionosphere R. Warnant 1, C. Deprez 1, L. Van de Vyvere 2 1 University of Liege, Liege, Belgium. 2 M3 System, Wavre, Belgium. Monitoring TEC for geodetic applications
Processing Combined GPS/GLONASS Data at swisstopo s Local Analysis Center
 armasuisse Federal Office of Topography swisstopo Processing Combined GPS/GLONASS Data at swisstopo s Local Analysis Center D. Ineichen, E. Brockmann, S. Schaer GLONASS data used for EUREF solutions swisstopo
armasuisse Federal Office of Topography swisstopo Processing Combined GPS/GLONASS Data at swisstopo s Local Analysis Center D. Ineichen, E. Brockmann, S. Schaer GLONASS data used for EUREF solutions swisstopo
COMBINED MULTI SYSTEM GNSS ANALYSIS FOR TIME AND FREQUENCY TRANSFER
 COMBINED MULTI SYSTEM GNSS ANALYSIS FOR TIME AND FREQUENCY TRANSFER R. Dach, S. Schaer, U. Hugentobler, T. Schildknecht, and A. Gäde Astronomical Institute, University of Bern, Sidlerstrasse. CH-312 Bern,
COMBINED MULTI SYSTEM GNSS ANALYSIS FOR TIME AND FREQUENCY TRANSFER R. Dach, S. Schaer, U. Hugentobler, T. Schildknecht, and A. Gäde Astronomical Institute, University of Bern, Sidlerstrasse. CH-312 Bern,
Bernese GPS Software 4.2
 Bernese GPS Software 4.2 Introduction Signal Processing Geodetic Use Details of modules Bernese GPS Software 4.2 Highest Accuracy GPS Surveys Research and Education Big Permanent GPS arrays Commercial
Bernese GPS Software 4.2 Introduction Signal Processing Geodetic Use Details of modules Bernese GPS Software 4.2 Highest Accuracy GPS Surveys Research and Education Big Permanent GPS arrays Commercial
Originally published as:
 Originally published as: Li, X., Ge, M., Dai, X., Ren, X., Fritsche, M., Wickert, J., Schuh, H. (2015): Accuracy and reliability of multi-gnss real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo.
Originally published as: Li, X., Ge, M., Dai, X., Ren, X., Fritsche, M., Wickert, J., Schuh, H. (2015): Accuracy and reliability of multi-gnss real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo.
Can we improve LAGEOS solutions by combining with LEO satellites?
 Can we improve LAGEOS solutions by combining with LEO satellites? Krzysztof Sośnica, Daniela Thaller, Adrian Jäggi, Rolf Dach, Christian Baumann, Gerhard Beutler Astronomical Institute, University of Bern,
Can we improve LAGEOS solutions by combining with LEO satellites? Krzysztof Sośnica, Daniela Thaller, Adrian Jäggi, Rolf Dach, Christian Baumann, Gerhard Beutler Astronomical Institute, University of Bern,
GNSS Integrity Monitoring
 www.dlr.de Chart 1 GNSS Integrity Monitoring Martini - Rome, 22 June 2017 GNSS Integrity Monitoring Dr. Ilaria Martini Institute of Communications and Navigation German Aerospace Center Rome, 22.06.2017
www.dlr.de Chart 1 GNSS Integrity Monitoring Martini - Rome, 22 June 2017 GNSS Integrity Monitoring Dr. Ilaria Martini Institute of Communications and Navigation German Aerospace Center Rome, 22.06.2017
Multi-GNSS Environment. Chris Rizos UNSW, Australia President IAG
 Multi-GNSS Environment Chris Rizos UNSW, Australia President IAG Visit official GNSS web sites: GPS - www.navcen.uscg.gov & www.gps.gov GLONASS - glonass-ianc.rsa.ru/en/ Galileo - www.esa.int/our_activities/navigation
Multi-GNSS Environment Chris Rizos UNSW, Australia President IAG Visit official GNSS web sites: GPS - www.navcen.uscg.gov & www.gps.gov GLONASS - glonass-ianc.rsa.ru/en/ Galileo - www.esa.int/our_activities/navigation
Introduction to Global Navigation Satellite System (GNSS) Signal Structure
 Signal Structure") Introduction to Global Navigation Satellite System (GNSS) Signal Structure Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp
Introduction to Global Navigation Satellite System (GNSS) Signal Structure Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp
ARCHITECTURE AND ANALYSIS OF GLONASS PSEUDORANGE BIASES
 MULTI-GNSS PRECISE POINT POSITIONING SOFTWARE ARCHITECTURE AND ANALYSIS OF GLONASS PSEUDORANGE BIASES JOHN EGYIR AGGREY A THESIS SUBMITTED TO THE FACULTY OF GRADUATE STUDIES IN PARTIAL FULFILLMENT OF THE
MULTI-GNSS PRECISE POINT POSITIONING SOFTWARE ARCHITECTURE AND ANALYSIS OF GLONASS PSEUDORANGE BIASES JOHN EGYIR AGGREY A THESIS SUBMITTED TO THE FACULTY OF GRADUATE STUDIES IN PARTIAL FULFILLMENT OF THE
Time and frequency transfer methods based on GNSS. LIANG Kun, National Institute of Metrology(NIM), China
, China") Time and frequency transfer methods based on GNSS LIANG Kun, National Institute of Metrology(NIM), China Outline Remote time and frequency transfer GNSS time and frequency transfer methods Data and results
Time and frequency transfer methods based on GNSS LIANG Kun, National Institute of Metrology(NIM), China Outline Remote time and frequency transfer GNSS time and frequency transfer methods Data and results
Sub-daily signals in GPS. at semi-annual and annual periods
 Sub-daily signals in GPS observations and their effect at semi-annual and annual periods Matt King1 Chris Watson2, Nigel Penna1 Newcastle University, UK 2 University of Tasmania, Australia 1 Propagation
Sub-daily signals in GPS observations and their effect at semi-annual and annual periods Matt King1 Chris Watson2, Nigel Penna1 Newcastle University, UK 2 University of Tasmania, Australia 1 Propagation
SIRGAS Combination Centre at DGFI Report for the SIRGAS 2009 General Meeting September 1, Buenos Aires, Argentina
 September 1, 2009. Buenos Aires, Argentina Laura Sánchez, Wolfgang Seemüller, Manuela Seitz. Deutsches Geodätisches Forschungsinstitut, DGFI Munich, Germany 1. Introduction The densification of the ITRF
September 1, 2009. Buenos Aires, Argentina Laura Sánchez, Wolfgang Seemüller, Manuela Seitz. Deutsches Geodätisches Forschungsinstitut, DGFI Munich, Germany 1. Introduction The densification of the ITRF
International Foundation HFSJG Activity Report 2016
 Name of research institute or organization: Bundesamt für Landestopografie / Swiss Federal Office of Topography (swisstopo) Title of project: Automated GNSS Network Switzerland (AGNES) Project leader and
Name of research institute or organization: Bundesamt für Landestopografie / Swiss Federal Office of Topography (swisstopo) Title of project: Automated GNSS Network Switzerland (AGNES) Project leader and
Compact multi-gnss PPP corrections messages for transmission through a 250 bps channel
 Compact multi-gnss PPP corrections messages for transmission through a 250 bps channel Ken Harima, School of Science, RMIT University Suelynn Choy, School of Science, RMIT University Chris Rizos, School
Compact multi-gnss PPP corrections messages for transmission through a 250 bps channel Ken Harima, School of Science, RMIT University Suelynn Choy, School of Science, RMIT University Chris Rizos, School
Fast convergence of Trimble CenterPoint RTX by regional augmentation
 Fast convergence of Trimble CenterPoint RTX by regional augmentation Dr. Ralf Drescher Trimble Terrasat GmbH, Munich EGU General Assembly 2015, Vienna Thursday, 16 April 2015 Outline Introduction CenterPoint
Fast convergence of Trimble CenterPoint RTX by regional augmentation Dr. Ralf Drescher Trimble Terrasat GmbH, Munich EGU General Assembly 2015, Vienna Thursday, 16 April 2015 Outline Introduction CenterPoint
RELEASE NOTES. Introduction. Trimble Infrastructure GNSS Series Receivers
 RELEASE NOTES Trimble Infrastructure GNSS Series Receivers These release notes describe the latest improvements made to the Trimble NetR9 GNSS Infrastructure series receivers. Introduction New Features
RELEASE NOTES Trimble Infrastructure GNSS Series Receivers These release notes describe the latest improvements made to the Trimble NetR9 GNSS Infrastructure series receivers. Introduction New Features
Principles of the Global Positioning System Lecture 20" Processing Software" Primary research programs"
 12.540 Principles of the Global Positioning System Lecture 20" Prof. Thomas Herring" Room 54-820A; 253-5941" tah@mit.edu" http://geoweb.mit.edu/~tah/12.540 " Processing Software" Examine basic features
12.540 Principles of the Global Positioning System Lecture 20" Prof. Thomas Herring" Room 54-820A; 253-5941" tah@mit.edu" http://geoweb.mit.edu/~tah/12.540 " Processing Software" Examine basic features
Global Products for GPS Point Positioning Approaching Real-Time
 Global Products for GPS Point Positioning Approaching Real-Time Y. Gao 1, P. Heroux 2 and M. Caissy 2 1 Department of Geomatics Engineering, University of Calgary 2 Geodetic Survey Division, Natural Resources
Global Products for GPS Point Positioning Approaching Real-Time Y. Gao 1, P. Heroux 2 and M. Caissy 2 1 Department of Geomatics Engineering, University of Calgary 2 Geodetic Survey Division, Natural Resources
Real-time challenges of an. Australian National Positioning Infrastructure
 Real-time challenges of an Australian National Positioning Infrastructure S. Melachroinos 1, T. Li 2,1, T. Papanikolaou 2,1, and J. Dawson 1 1 Geoscience Australia Geodesy Section GSM Group CSEM Division
Real-time challenges of an Australian National Positioning Infrastructure S. Melachroinos 1, T. Li 2,1, T. Papanikolaou 2,1, and J. Dawson 1 1 Geoscience Australia Geodesy Section GSM Group CSEM Division
Simulation Analysis for Performance Improvements of GNSS-based Positioning in a Road Environment
 Simulation Analysis for Performance Improvements of GNSS-based Positioning in a Road Environment Nam-Hyeok Kim, Chi-Ho Park IT Convergence Division DGIST Daegu, S. Korea {nhkim, chpark}@dgist.ac.kr Soon
Simulation Analysis for Performance Improvements of GNSS-based Positioning in a Road Environment Nam-Hyeok Kim, Chi-Ho Park IT Convergence Division DGIST Daegu, S. Korea {nhkim, chpark}@dgist.ac.kr Soon
The IGS Real-time Pilot Project
 The IGS Real-time Pilot Project The Development of Real-time IGS Correction Products for Precise Point Positioning Mark Caissy, Georg Weber, Loukis Agrotis, Gerhard Wübbena, and Manuel Hernández-Pajares
The IGS Real-time Pilot Project The Development of Real-time IGS Correction Products for Precise Point Positioning Mark Caissy, Georg Weber, Loukis Agrotis, Gerhard Wübbena, and Manuel Hernández-Pajares
Views on Interoperability
 Views on Interoperability International Committee on Global Navigation Satellite Systems Prague, November 10 th 14 th 2014 Navigation solutions powered by Europe INTRODUCTION The original purpose of the
Views on Interoperability International Committee on Global Navigation Satellite Systems Prague, November 10 th 14 th 2014 Navigation solutions powered by Europe INTRODUCTION The original purpose of the
IONEX: The IONosphere Map EXchange Format Version 1.1
 IONEX: The IONosphere Map EXchange Format Version 1.1 Stefan Schaer, Werner Gurtner Astronomical Institute, University of Berne, Switzerland stefan.schaer@aiub.unibe.ch Joachim Feltens ESA/ESOC, Darmstadt,
IONEX: The IONosphere Map EXchange Format Version 1.1 Stefan Schaer, Werner Gurtner Astronomical Institute, University of Berne, Switzerland stefan.schaer@aiub.unibe.ch Joachim Feltens ESA/ESOC, Darmstadt,
Positioning Techniques. João F. Galera Monico - UNESP Tuesday 12 Sep
 Positioning Techniques João F. Galera Monico - UNESP Tuesday 12 Sep Positioning methods Absolute Positioning Static and kinematic SPP and PPP Relative Positioning Static Static rapid Semi kinematic Kinematic
Positioning Techniques João F. Galera Monico - UNESP Tuesday 12 Sep Positioning methods Absolute Positioning Static and kinematic SPP and PPP Relative Positioning Static Static rapid Semi kinematic Kinematic
MINOS Timing and GPS Precise Point Positioning
 MINOS Timing and GPS Precise Point Positioning Stephen Mitchell US Naval Observatory stephen.mitchell@usno.navy.mil for the International Workshop on Accelerator Alignment 2012 in Batavia, IL A Joint
MINOS Timing and GPS Precise Point Positioning Stephen Mitchell US Naval Observatory stephen.mitchell@usno.navy.mil for the International Workshop on Accelerator Alignment 2012 in Batavia, IL A Joint
Posicionamento por ponto com. Posicionamento por satélite UNESP PP 2017 Prof. Galera
 Posicionamento por ponto com multiconstelação GNSS Posicionamento por satélite UNESP PP 2017 Prof. Galera Single-GNSS Observation Equations Considering j = 1; : : : ; f S the frequencies of a certain GNSS
Posicionamento por ponto com multiconstelação GNSS Posicionamento por satélite UNESP PP 2017 Prof. Galera Single-GNSS Observation Equations Considering j = 1; : : : ; f S the frequencies of a certain GNSS
Real-time Stream Conversion to RTCM-3 MSM and RINEX-3 in IGS/MGEX Context
 Real-time Stream Conversion to RTCM-3 MSM and RINEX-3 in IGS/MGEX Context Georg Weber (BKG), Ken MacLeod (NRCan), Leos Mervart (CTU), Oliver Montenbruck (DLR), James Perlt (BKG), Dirk Stöcker (Alberding),
Real-time Stream Conversion to RTCM-3 MSM and RINEX-3 in IGS/MGEX Context Georg Weber (BKG), Ken MacLeod (NRCan), Leos Mervart (CTU), Oliver Montenbruck (DLR), James Perlt (BKG), Dirk Stöcker (Alberding),
GNSS Accuracy Improvements through Multipath Mitigation with New Signals and services
 GNSS Accuracy Improvements through Multipath Mitigation with New Signals and services Andrey Veytsel, Ph.D Moscow Technical University 10 Meeting of the International Committee on Global Navigation Satellite
GNSS Accuracy Improvements through Multipath Mitigation with New Signals and services Andrey Veytsel, Ph.D Moscow Technical University 10 Meeting of the International Committee on Global Navigation Satellite
IGS Activities for Improving its Contribution to ITRF
 IGS Activities for Improving its Contribution to ITRF G. P. R. J. I. P. Gendt Fang Ferland Ray Romero Steigenberger (GeoForschungsZentrum, Potsdam, Germany) (San Diego, USA ) (Natural Resources, Canada
IGS Activities for Improving its Contribution to ITRF G. P. R. J. I. P. Gendt Fang Ferland Ray Romero Steigenberger (GeoForschungsZentrum, Potsdam, Germany) (San Diego, USA ) (Natural Resources, Canada
INITIAL TESTING OF A NEW GPS RECEIVER, THE POLARX2, FOR TIME AND FREQUENCY TRANSFER USING DUAL- FREQUENCY CODES AND CARRIER PHASES
 INITIAL TESTING OF A NEW GPS RECEIVER, THE POLARX2, FOR TIME AND FREQUENCY TRANSFER USING DUAL- FREQUENCY CODES AND CARRIER PHASES P. Defraigne, C. Bruyninx, and F. Roosbeek Royal Observatory of Belgium
INITIAL TESTING OF A NEW GPS RECEIVER, THE POLARX2, FOR TIME AND FREQUENCY TRANSFER USING DUAL- FREQUENCY CODES AND CARRIER PHASES P. Defraigne, C. Bruyninx, and F. Roosbeek Royal Observatory of Belgium
GAMIT/GLOBK for GNSS. Material from R. W. King, T. A. Herring, M. A. Floyd (MIT) and S. C. McClusky (now at ANU)
 and S. C. McClusky (now at ANU)") GAMIT/GLOBK for GNSS M. A. Floyd Massachusetts Institute of Technology, Cambridge, MA, USA GPS Data Processing and Analysis with GAMIT/GLOBK and track GNS Science, Lower Hutt, New Zealand 26 February 2
GAMIT/GLOBK for GNSS M. A. Floyd Massachusetts Institute of Technology, Cambridge, MA, USA GPS Data Processing and Analysis with GAMIT/GLOBK and track GNS Science, Lower Hutt, New Zealand 26 February 2
GNSS zenith delays and gradients in the analysis of VLBI Intensive sessions
 GNSS zenith delays and gradients in the analysis of VLBI Intensive sessions Kamil Teke (1), Johannes Böhm (2), Matthias Madzak (2), Younghee Kwak (2), Peter Steigenberger (3) (1) Department of Geomatics
GNSS zenith delays and gradients in the analysis of VLBI Intensive sessions Kamil Teke (1), Johannes Böhm (2), Matthias Madzak (2), Younghee Kwak (2), Peter Steigenberger (3) (1) Department of Geomatics
ION GNSS Galileo, an ace up in the sleeve for PPP techniques
 ION GNSS+ 2016 an ace up in the sleeve for PPP techniques September 15 TH, 2016 Session D3: High Precision GNSS Positioning I. Rodríguez-Pérez, L. Martínez-Fernández, G. Tobías-González, J. D. Calle-Calle,
ION GNSS+ 2016 an ace up in the sleeve for PPP techniques September 15 TH, 2016 Session D3: High Precision GNSS Positioning I. Rodríguez-Pérez, L. Martínez-Fernández, G. Tobías-González, J. D. Calle-Calle,
Innovation: Instantaneous centimeter-level multi-frequency precise point positioning
 Innovation: Instantaneous centimeter-level multi-frequency precise point positioning July 4, 2018 - By Denis Laurichesse and Simon Banville CARRIER PHASE. It s one of the two main measurement types or
Innovation: Instantaneous centimeter-level multi-frequency precise point positioning July 4, 2018 - By Denis Laurichesse and Simon Banville CARRIER PHASE. It s one of the two main measurement types or
Effect of Differential Code Biases on the GPS CORS Network: A Case Study of Egyptian Permanent GPS Network (EPGN)
") Effect of Differential Code Biases on the GPS CORS Network: A Case Study of Egyptian Permanent GPS Network (EPGN) Mohammed A. Abid 1, 2*, Ashraf Mousa 3, Mostafa Rabah 4, Mahmoud El mewafi 1, and Ahmed
Effect of Differential Code Biases on the GPS CORS Network: A Case Study of Egyptian Permanent GPS Network (EPGN) Mohammed A. Abid 1, 2*, Ashraf Mousa 3, Mostafa Rabah 4, Mahmoud El mewafi 1, and Ahmed
THE STABILITY OF GPS CARRIER-PHASE RECEIVERS
 THE STABILITY OF GPS CARRIER-PHASE RECEIVERS Lee A. Breakiron U.S. Naval Observatory 3450 Massachusetts Ave. NW, Washington, DC, USA 20392, USA lee.breakiron@usno.navy.mil Abstract GPS carrier-phase (CP)
THE STABILITY OF GPS CARRIER-PHASE RECEIVERS Lee A. Breakiron U.S. Naval Observatory 3450 Massachusetts Ave. NW, Washington, DC, USA 20392, USA lee.breakiron@usno.navy.mil Abstract GPS carrier-phase (CP)
Future GNSS Precision Applications. Stuart Riley
 Future GNSS Precision Applications Stuart Riley Major Trimble Precision Markets Survey Mostly person portable equipment Construction Machine control and person carried equipment Includes Marine applications
Future GNSS Precision Applications Stuart Riley Major Trimble Precision Markets Survey Mostly person portable equipment Construction Machine control and person carried equipment Includes Marine applications
PPP with Ambiguity Resolution (AR) using RTCM-SSR
 using RTCM-SSR") PPP with Ambiguity Resolution (AR) using RTCM-SSR Gerhard Wübbena, Martin Schmitz, Andreas Bagge Geo++ GmbH 30827 Garbsen Germany www.geopp.de PPP with Ambiguity Resolution (AR) using RTCM-SSR Abstract
PPP with Ambiguity Resolution (AR) using RTCM-SSR Gerhard Wübbena, Martin Schmitz, Andreas Bagge Geo++ GmbH 30827 Garbsen Germany www.geopp.de PPP with Ambiguity Resolution (AR) using RTCM-SSR Abstract
WHU's Developments for the GPS Ultra-Rapid Products and the COMPASS Precise Products
 WHU's Developments for the GPS Ultra-Rapid Products and the COMPASS Precise Products C. Shi; Q. Zhao; M. Li; Y. Lou; H. Zhang; W. Tang; Z. Hu; X. Dai; J. Guo; M.Ge; J. Liu 2012 International GNSS Workshop
WHU's Developments for the GPS Ultra-Rapid Products and the COMPASS Precise Products C. Shi; Q. Zhao; M. Li; Y. Lou; H. Zhang; W. Tang; Z. Hu; X. Dai; J. Guo; M.Ge; J. Liu 2012 International GNSS Workshop
Multisystem Real Time Precise-Point-Positioning, today with GPS+GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS
 2 International Symposium on /GNSS October 26-28, 2. Multisystem Real Time Precise-Point-Positioning, today with +GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS Álvaro Mozo García,
2 International Symposium on /GNSS October 26-28, 2. Multisystem Real Time Precise-Point-Positioning, today with +GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS Álvaro Mozo García,
PRECISE RECEIVER CLOCK OFFSET ESTIMATIONS ACCORDING TO EACH GLOBAL NAVIGATION SATELLITE SYSTEMS (GNSS) TIMESCALES
 TIMESCALES") ARTIFICIAL SATELLITES, Vol. 52, No. 4 DOI: 10.1515/arsa-2017-0009 PRECISE RECEIVER CLOCK OFFSET ESTIMATIONS ACCORDING TO EACH GLOBAL NAVIGATION SATELLITE SYSTEMS (GNSS) TIMESCALES Thayathip Thongtan National
ARTIFICIAL SATELLITES, Vol. 52, No. 4 DOI: 10.1515/arsa-2017-0009 PRECISE RECEIVER CLOCK OFFSET ESTIMATIONS ACCORDING TO EACH GLOBAL NAVIGATION SATELLITE SYSTEMS (GNSS) TIMESCALES Thayathip Thongtan National
Evaluation of L2C Observations and Limitations
 Evaluation of L2C Observations and Limitations O. al-fanek, S. Skone, G.Lachapelle Department of Geomatics Engineering, Schulich School of Engineering, University of Calgary, Canada; P. Fenton NovAtel
Evaluation of L2C Observations and Limitations O. al-fanek, S. Skone, G.Lachapelle Department of Geomatics Engineering, Schulich School of Engineering, University of Calgary, Canada; P. Fenton NovAtel
Evaluation of Multi-Constellation GNSS Precise Point Positioning (PPP) Techniques in Egypt
 Techniques in Egypt") Evaluation of Multi-Constellation GNSS Precise Point Positioning (PPP) Techniques in Egypt Mahmoud Abd Rabbou and Adel El-Shazly Department of Civil Engineering, Cairo University Presented by; Dr. Mahmoud
Evaluation of Multi-Constellation GNSS Precise Point Positioning (PPP) Techniques in Egypt Mahmoud Abd Rabbou and Adel El-Shazly Department of Civil Engineering, Cairo University Presented by; Dr. Mahmoud
SSR Technology for Scalable Real-Time GNSS Applications
 SSR Technology for Scalable Real-Time GNSS Applications Gerhard Wübbena, Jannes Wübbena, Temmo Wübbena, Martin Schmitz Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Abstract SSR Technology for scalable
SSR Technology for Scalable Real-Time GNSS Applications Gerhard Wübbena, Jannes Wübbena, Temmo Wübbena, Martin Schmitz Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Abstract SSR Technology for scalable
Satellite Bias Corrections in Geodetic GPS Receivers
 Satellite Bias Corrections in Geodetic GPS Receivers Demetrios Matsakis, The U.S. Naval Observatory (USNO) Stephen Mitchell, The U.S. Naval Observatory Edward Powers, The U.S. Naval Observatory BIOGRAPHY
Satellite Bias Corrections in Geodetic GPS Receivers Demetrios Matsakis, The U.S. Naval Observatory (USNO) Stephen Mitchell, The U.S. Naval Observatory Edward Powers, The U.S. Naval Observatory BIOGRAPHY