Dynamic Positioning System
|
|
|
- Bernadette Brown
- 5 years ago
- Views:
Transcription






1 Dynamic Positioning System


. The Mega")
.")
2 Dynamic Positioning System Features The Mega-Guard Dynamic Positioning System (DP) automatically controls a vessel s heading and position by activating thrusters based upon data as received from position reference systems, gyrocompasses, wind sensors and motion reference units. The uto Track mode allows the ship to move along a pre-defined track at low speed as defined by the operator. The Mega-Guard Joystick Control System (JC) is a basic version of the Mega-Guard DP system and allows the operator to automatically control the heading and manually position the vessel based upon data as received from gyrocompasses and wind sensors. The Mega-Guard DP and JC system are based upon the field-proven products of the Mega-Guard product line and the experience as gained on the design and delivery of joystick Operator Workstation with Colour Graphic Screen and Trackball control systems as supplied on many different kind of vessels since 980 (see reference list). The Mega-Guard DP and JC system are suited for e.g. supply vessels, tug boats, dredgers, cable and pipe laying vessels, FPSO's, heavy lift vessels and mega-yachts in full accordance with the applicable classification and IMO rules (DP, DP and DP). Main advantages ccurate positioning with up to dm accuracy in combination with high accuracy position reference (GNSS, laser, radar) and thrusters. Sea trial tuning and testing can be limited to three days maximum. Parameter tuning is already done before shipment out of our factory by modelling of the ship and testing with a ship simulator. Extremely reliable hardware by using only solid state components and 4VDC power supply for all components within the DP system. ll Mega-Guard DP hardware and software is designed and manufactured by Praxis utomation Technology and is applied in other Mega-Guard products as well (MCS, VCMS, PMS, PCS, INS, etc). Various language options are available including Chinese, Japanese and others. Supports third party and own (Mega-Guard brand) position reference systems: Mega-Guard DGPS, GNSS with Seastar, Hydroacoustic Position Reference (HPR) and Taut wire Position Reference (TPR). Cost effective DP solution. Reliable hardware that is field proven on hundreds of vessels, allows for efficient off the shelf manufacturing in large quantities. s a result, we can offer our advanced Mega-Guard Dynamic Positioning System, including sensor package, at a very attractive price level. In addition, our customer's investment is supported by a world wide service network.
 Jack-up platforms (DP) Mega-yachts (DP0) Supply Vessel Cruise ship (DP0) pplicable classification: DNV, V, LR, GL, S, CCS, RS, IRS, NKK.")
3 References Cable and pipe laying vessels (DP) Offshore supply vessels (DP and DP) Ocean salvage vessels (DP) Tug and work boats (DP) Multi purpose vessels (DP and DP) Platform crew boats (DP) Passenger ferries (DP) Jack-up platforms (DP) Mega-yachts (DP0) Supply Vessel Cruise ship (DP0) pplicable classification: DNV, V, LR, GL, S, CCS, RS, IRS, NKK. Joystick and Trackball panel Control mode selection is executed with pushbuttons on the Joystick panel. Step adjustments of position and heading setpoints can be made on the Joystick panel as well. Larger size widescreen TFT's also allow for absolute entering of position (northings/easting or UTM) and heading (degrees) setpoints through the Trackball panel. Vessel behavior, sensor data and thruster data (setpoint and feedback) are shown on mimic diagrams on the widescreen TFT's. The following main Control Modes can be selected on the Joystick panel: Joystick Manual uto Heading Joystick uto Heading uto Position (option on JC Workstation) Various other modes can be selected on the DP Operator Workstation when the system is in uto Position mode: uto Position- Minimum Power Mode ;Weather Vane Mode uto Position-Joystick Manual Surge/Sway Mode uto Position- Minimum Power Mode ;Positioning Circle Mode uto Track (low and high speed) Mode uto Position-Joystick Manual Surge Mode Track Follow Mode uto Position-Joystick Manual Sway Mode In addition, the DP system can be used as a training system by entering the Simulator-Trainer mode. The Simulator mode can only be selected on the DP Operator Workstation when the DP and JC system are not active (thrusters in individual mode). The built-in Simulator-Trainer mode fulfills the rules of a Nautical Institute Class C simulator. Models JOY MN MN SURGE JOY UTO MN SWY UTO POS ESC UTO HDG HOLD CTRL CC Joystick and Trackball panel ESC T DEL ENTER Mega-Guard JC Joystick Control System with optional position holding capability Mega-Guard DP0 Dynamic Positioning System Mega-Guard DP Dynamic Positioning System with independent JC System Mega-Guard DP Dual redundant Dynamic Positioning System with independent JC System Mega-Guard DP Triple redundant Dynamic Positioning System with independent JC System Ship automation, navigation and electric propulsion
 Diagram (bow pointing upwards) Capability Positioning sensors Other sensors The following sections describe the various")
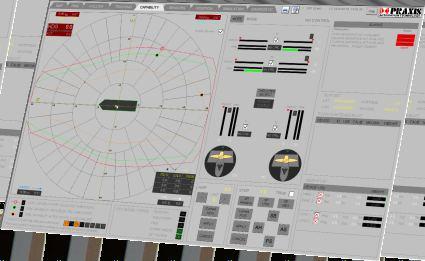
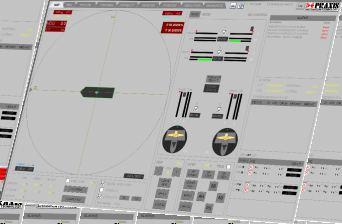
4 DP Operator Workstation Operator mimics The DP Operator Workstation contains user friendly mimic diagrams which enable safe and accurate DP operations. The following main mimic diagrams are available: Map (North pointing upwards) Diagram (bow pointing upwards) Capability Positioning sensors Other sensors The following sections describe the various functions available within the mimic diagrams. Map mimic as displayed on Operator Workstation Map section Diagram section Heading indication with compass slider Heading indication with rotating compass and rotating HDG ( ) and ROT ( /min) decimal degrees Latitude / Longitude; map indication HDG ( ) and ROT ( /min) COG ( ) and SOG (knot) Latitude / Longitude Error North (m) and Error East (m) COG ( ) and SOG (knot) Vessel orientation, heading Error X (m) surge and Error Y (m) sway and movement Wind and current vectors relative SOG vector (green) Total thrust vector with thrust amplitude and direction Wind vector (yellow) Individual thrust indication for each thruster with amplitude Force vector (white); and direction controller output section argraph and numeric value for each thruster: setpoint and feedback n icon for each thruster showing thrust angle setpoint and feedback ready indication Heading controller output Station in control and Operating mode larm area 6 rows for alarm display with alarm Footprint mimic as displayed on Operator Workstation acknowledgement for each alarm Day/night vision selection 4

5 Capability section Online X-Y plot of wind capability with selected thrusters and selected current value Capability plot with 80% thrust, 00% thrust and with worst case thruster failure Wind vector; direction and speed; if this vector reaches the capability boundries the vessel is out of capability Current settings Sensor section Supports multiple position reference systems: DGPS, laser, radar, hydroacoustic, taut wire and winch Capability mimic as displayed on Operator Workstation Supports multiple sensors: gyro, wind and motion reference unit () bsolute (Northings and Eastings) or relative coordinates Sensor validation and weighing Environmental setting Wind compensation setting in between 0% and 00% Heading setting Heading setpoint ( ) and ROT ( /min) maximum larm limit ( ) Current direction ( ) Current speed (knot) Check box to select or de-select automatic current compensation Steer limit ( ) Heading gain (%) Position setting Step (m) adjustment earing ( ) adjustment Relative (X/Y) or absolute (N/E ) Position setpoint mode larm limit (m) Set new position Up/down and Left/right step (m) Position gain Joystick setting The following parameters can be set: Joystick gain Display of thrust vectors to the Power Management mimic as displayed on Operator Workstation thruster controller Ship automation, navigation and electric propulsion 5
6 Scope of supply General description The Mega-Guard Dynamic Positioning System consists of highly reliable Dynamic Positioning class notifications and scope of supply Class society Notation Mega-Guard IMO S CCS DP DP DP DP DP DP DP S0 DP S DP S LRS DP S DP CM DP M (redundant) DP Operator Workstation DNV Dynpos V Dynapos and s (one for each ) which are interconnected by DP DP UT UT UT UT SM M/ M/ S R RO T T R a redundant DP Ethernet network. DP DP DP DP DP DP DP0 DP DP DP DP0 DP DP DP DP0 DP DP DP DP0 DP DP DP Position * * * * * * * * * * * * * Wind The central processing unit of the DP Operator Workstation consists of a DP equipped with Gyro interfaces to the high brightness VRS () - TFT screen, the redundant UPS DP Ethernet network, the Joystick panel, the Trackball panel and The table indicates the number of required reference sensors * Position reference systems to be of different type. Dispensation can be given by class for DP in case not practical (multiple) 8 channel NME Input modules for connection to Heading, DP class notification and scope of supply table Wind, Position and Motion Reference Unit sensors. The Mega-Guard Joystick Control System is identical with the Mega-Guard DP system. Scope of supply The Joystick panel is equipped with a robust joystick which supports a rate of turn action as well. In addition, pushbuttons are available for mode selection and step adjustment of position setpoint (fore-aft, port-starboard) and heading setpoint. RCODE LEL PRODUCT LEL THRUSTER DP CONTROL SELECTED THRUSTER PITCH FEEDCK SWITCH DP/JC IN CONTROL PS SHFT GEN REKER PS SHFT GEN LOD 9 4 USTIE REKER STTUS USTIE REKER STTUS 0 5 THRUSTER DP CLL CONTROL THRUSTER PITCH SETPOINT The DP Operator Workstation can be operated by Trackball panel and/or Touchscreen. The Trackball panel is equipped with an operator friendly ergonomic trackball and numeric keypad for easy entering e.g. a position setpoint (northings/easting or UTM) Each thruster is equipped with its own independent and accepts any kind of thruster suitable for DP applications (e.g. CPP with rudder, azimuth thruster, tunnel thrusters etc). The s provide a redundant DP Ethernet network interface to the (redundant) DP. In addition, the 4V 7 4V 4Vdc IN s are equipped with an independent and redundant 4Vdc IN 0V 4 8 0V c 5 9 N.C. FILURE JC Ethernet network interface to the JC and include nc 6 redundant isolated power supply inputs. The s are suitable for central installation on the bridge (all s mounted in a single cabinet) or for de-central installation near each thruster (each c mounted on a DIN rail or in a single cabinet) r+ 0 N.C. ETH ETHERNET ETHERNET ETH ETH ETHERNET ETHERNET ETH HORN OUTPUT XP05 DP no r- 4 DDRESS RESISTOR The redundant UPS powers the Mega-Guard DP System. unique feature of the Mega-Guard DP system is that it is completely powered by 4VDC. 6



7 DP with extended Kalman filtering The Dynamic Positioning controller is based on a detailed mathematical model of vessel motion in response to forces from thrusters, wind, waves and water current. The controller uses an extended Kalman filter for optimal estimation of vessel motions and environmental forces from wind, waves and current. The DP is based on feedback from the motion variables where the oscillatory, wave-induced component is removed by the estimator. Feedback from the water current estimate provides the integral action of the system and feed forward from the wind force estimates are implemented. The DP keeps accurate heading and position DP Operator Workstation with built-in DP controller control within the operator specified limits. Reference sensors The reference sensors are divided in the following categories: Position reference system; e.g. DGPS, GNSS, laser, radar, hydroacoustic and taut wire. Heading reference system; e.g. gyro. Environmental reference system; e.g. wind sensor. Ship motion reference system; e.g.. Interface with PMS n interface is provided to the Power Management System in order to request for sufficient electrical power in case the vessel is controlled by the Dynamic Positioning System. t the same time, the Mega-Guard Dynamic Positioning System will make sure that the thrusters do not consume more power than available, in order to prevent a blackout. DPO Training System The Mega-Guard DPO Training System is supplied in accordance with the rules of the Nautical Institute and DNV. The Mega-Guard DPO Training System is a full DP ridge simulator which is supplied in different classes fulfilling the rules of Class, Class and Class C DPO training system. The Class Training System includes a DP set-up including individual thruster controls and an outside view with 65 TFT screens providing an outside view of 40 degrees. Class includes a DP set-up and an outside view of 0 degrees. Class C includes a single DP Workstation with built-in DPO Training System simulator and trainer and optionally an outside view. Ship automation, navigation and electric propulsion 7
8 DP Overviews Mega-Guard DP0 lock Diagram DGPS GLONSS NTRIP DP Workstation TFT 7~6" 4Vdc NME Portable DP Workstation Connection oxes 0Vac Deskjet Printer UPS Cabinet 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 0Vac s mounted central (on bridge) or local (near thrusters) Mega-Guard DP lock Diagram LSER CYSCN RDR RDSCN HYDROCOUSTIC TUT WIRE Portable DP Workstation DP Workstation TFT 7~6" 4Vdc JC Workstation NME DGPS GLONSS SESTR VERIPOS NME DGPS GLONSS NTRIP Touch TFT 0" Connection oxes 4Vdc 0Vac Deskjet Printer Joystick Ethernet JC Ethernet JC UPS Cabinet 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 0Vac s mounted central (on bridge) or local (near thrusters) 8
9 Mega-Guard DP lock Diagram LSER CYSCN Portable DP Workstation RDR RDSCN TFT 7~6" TFT 7~6" 4Vdc DP Workstation NME DP Workstation 4Vdc HYDROCOUSTIC TUT WIRE JC Workstation NME DGPS GLONSS DGPS GLONSS SESTR VERIPOS SESTR VERIPOS DGPS GLONSS NTRIP Touch TFT 0" Connection oxes Deskjet Printer 0Vac 0Vac 4Vdc Joystick Ethernet JC Ethernet JC UPS Cabinet 4Vdc 4Vdc Laserjet Printer 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc UPS Cabinet 4Vdc 4Vdc 4Vdc 0Vac 4Vdc 0Vac s mounted central (on bridge) or local (near thrusters) Mega-Guard DP lock Diagram DP Workstation TFT 7~6" 4Vdc Connection oxes RDR RDSCN TUT WIRE HYDROCOUSTIC DP Workstation TFT 7~6" 4Vdc DP Workstation JC Workstation 0Vac TFT 7~6" 4Vdc Joystick 4Vdc 4Vdc Ethernet JC 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc Laserjet Printer Ethernet JC 4Vdc 4Vdc 4Vdc 0Vac Deskjet Printer UPS Cabinet Touch TFT 0" 0Vac NME Portable DP Workstation LSER CYSCN NME DGPS GLONSS DGPS GLONSS SESTR VERIPOS SESTR VERIPOS DGPS GLONSS NTRIP 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc 4Vdc UPS Cabinet UPS Cabinet 4Vdc 0Vac 4Vdc 0Vac s mounted central (on bridge) or local (near thrusters) Ship automation, navigation and electric propulsion 9
 Remarks GNSS L/L GPS/Glonass with option IL (DGN-500) DGPS with SS DGN-500 m Global Differential signals received via satellite Hydroacoustic")
 Depth in between 00 to 4000m Third party position reference systems like DGPS Taut wire Position Reference TPR-5000 0.")
10 Position Reference System Overview Position Reference ThefollowingMega-GuardDPPositionReference Systems(PRS)areavailable: Position Reference Systems: ccuracy and Coverage Technology Manufacturer Model ccuracy 95% Coverage DGPS with SS (DGN-500) Remarks GNSS L/L GPS/Glonass with option IL (DGN-500) DGPS with SS DGN-500 m Global Differential signals received via satellite Hydroacoustic Position Reference (HPR-5000) GNSS L/L GPS/ Glonass with option IL DGN-500 0,m Global Subscription required Seastar/Marinestar Taut wire Position Reference (TPR-5000) Hydroacoustic Position Reference HPR degrees 5000m from transponder (X-Y) Depth in between 00 to 4000m Third party position reference systems like DGPS Taut wire Position Reference TPR to 7m (X-Y) 500m from clump weight (X-Y) Depth in between 00 to 00m with Veripos and position reference systems based DGPS with Veripos L/L Subsea7 LD5 0.-m Global Subscripton required Options: Glonass,IL 0.m 800m from reflector Reflector mounted on platform Laser Position Reference Guidance Nav. CyScan Radar Position Reference Guidance Nav. RadaScan 0.m 500m from responder Transponder mounted on platform on laser and radar are supported as well. The Mega-Guard DP system supports up to 6 different position reference systems. The final position is calculated taking into account the reliability, accuracy and weighing factor of each Position Reference System ccuracy and Coverage position reference system. GNSS L/L GPS/Glonass with SS & Fugro Marine-/Seastar The Mega-Guard GNSS position reference system is a cost effective GNSS solution to reach sub-meter accuracy with global coverage and with Marinestar/Seastar subscription. The Mega-Guard GNSS consists of a smart antenna with built-in electronics and a connection box mounted in bridge console. The GNSS can be operated from the DP Workstation or from a separate GNSS Workstation (option). Specification of the GNSS: L, L, SS and Marinestar/ Seastar L band GPS and Glonass 70 receiver channels Real time update 5 times per second. Upgradable to Galileo Position and quality indication on DP Workstation or GNSS Workstation ccuracy with GPS and Glonass :.5m ccuracy with SS :0.6m ccuracy with Marinestar/Seastar :0.m Note: accuracies specified with DRMS (95%) probability CyScan/RadaScan Laser and Radar Position Reference GNSS Smart ntenna GNSS Workstation NME position Connection ox GNSS with optional GNSS Workstation 0 To DP The Mega-Guard Dynamic Positioning System supports Laser and Radar Position Reference Systems from Guidance Marine. The Cyscan is a laser position reference system. It measures the range and bearing of reflective targets allowing the Cyscan to calculate the positon and heading relative to the target reflector on another vessel or structure. The Cyscan is supplied as deck unit and various type of reflectors are available. The (mini) RadaScan is a radar position reference system. The RadaScan accurately measures the range and bearing of one or more intelligent microwave targets called responders, allowing for the calculation of vessel position and heading relative to the target responder on another vessel or structure.




11 Hydroacoustic Postion Reference The Mega-Guard Hydro coustic Position Reference (HPR) is applied as a cost effective and highly accurate position reference system for the Mega-Guard Dynamic Positioning System. The position of the seabed L Transponders are used as reference points for the ship mounted L Transceiver. The -INS, gyro and optional DGPS are connected to the HPR as well Workstation. The HPR Workstation accurately calculates the relative position of the vessel taking into account the data as received from the L Transceiver, -INS, gyro and optional DGPS. The L Transponder contains a release mechanism with floating collar for recovery of the transponder from the seabed. L Transceiver UTOMTION TECHNOLOGY HPR Workstation seabed The Mega-Guard Hydro coustic Position Reference L Transponder transponder floating collar release system weight Hydroacoustic Position Reference consists of the following components: HPR Workstation providing a user friendly man-machine interface L Transceiver with 5000 meter range L Transponders for 4000 meter water depths Motion Reference Unit Control Cabinet The L Transceiver can be mounted in two different ways: Hull mounted with gate valve and deployment machine Pole mounted with over-the-side pole L Transponder Taut Wire Position Reference The Mega-Guard Taut Wire Position Reference (TPR) is applied as position reference system for the Mega-Guard Dynamic Positioning System. The taut wire deck winch is deck mounted at port or starboard side of the vessel. The Mega-Guard TPR is very accurate, reliable and maintenance free as it is constructed as a full electric device (no hydraulics used for winch). The Mega-Guard Taut Wire Position Reference consists of the following components: Taut Wire Deck Winch with a 500 meter long / 6mm thick steel cable and clumb weight. The clumb weight is lowered to the seabed and the cable is put to constant tension. The deck winch includes a Taut wire Operator Panel, with an LCD display and pushbuttons for local operation. The relative position, bearing and the tension of the steel cable are displayed on the LCD display. Taut Wire Control Cabinet, with control electronics for the deck winch and a TPR. The TPR controls the deck winch and calculates the relative position of the ship taking into account the input from the Motion Reference Unit for compensating the roll and pitch off the vessel. Taut Wire Operator Panel, for flush panel mounting in bridge console, with an LCD display and pushbuttons for bridge operation. Taut Wire Deck Winch Ship automation, navigation and electric propulsion














12 Vessel Management System Power Management System Propulsion Control System Dynamic Positioning System Integrated Navigation System Heading Control System NWS Watch larm System Navigation Light Control Wiper Control System Fire larm System Econometer Internet Fleet Management Electric Steerable Pod propulsor Electric Propulsion Motor Electric Fin Stabilizer Electric Winch DC us Generator DC us attery Storage DC us Power Inverter DC us Distribution Ship automation, navigation and electric propulsion Praxis utomation Technology.V., Zijldijk 4, 5 Leiderdorp, The Netherlands Phone + (0)7 5555, Fax + (0) , info@praxis-automaion.com, Web
Dynamically Positioned and Thruster Assisted Position Moored Vessels
 Dynamically Positioned and Thruster Assisted Position Moored Vessels Professor Asgeir J. Sørensen, Department of Marine Technology, Norwegian University of Science and Technology, Otto Nielsens Vei 10,
Dynamically Positioned and Thruster Assisted Position Moored Vessels Professor Asgeir J. Sørensen, Department of Marine Technology, Norwegian University of Science and Technology, Otto Nielsens Vei 10,
DP MAINTENANCE INTRODUC INTR TION T TION O SENS T OR O SENS S OR
 DP MAINTENANCE INTRODUCTION TO SENSORS Sensors Wind Sensors PMEs Workstations Gyrocompasses Network Switchbox Network Switchbox Controller Cabinets Dual Ethernet Motion Sensors (VRU) Field Stations Thrusters
DP MAINTENANCE INTRODUCTION TO SENSORS Sensors Wind Sensors PMEs Workstations Gyrocompasses Network Switchbox Network Switchbox Controller Cabinets Dual Ethernet Motion Sensors (VRU) Field Stations Thrusters
Hvordan forbedre sikkerheten og effektiviteten ved ankerhåndteringsoperasjoner?
 Hvordan forbedre sikkerheten og effektiviteten ved ankerhåndteringsoperasjoner? KM s new design thinking for Offshore Marine Operations Marintekniske Dager 2013 Trondheim, 9. 10.oktober Thor Hukkelås,
Hvordan forbedre sikkerheten og effektiviteten ved ankerhåndteringsoperasjoner? KM s new design thinking for Offshore Marine Operations Marintekniske Dager 2013 Trondheim, 9. 10.oktober Thor Hukkelås,
VESSEL IDENTIFICATION. Ready to work:
 The Nautical Geo is a research vessel available for worldwide operations. Fitted with cutting-edge survey equipment, she can undertake complex survey operations as well as light construction support, ensuring
The Nautical Geo is a research vessel available for worldwide operations. Fitted with cutting-edge survey equipment, she can undertake complex survey operations as well as light construction support, ensuring
COMMAND-DEQ IBS Integrated Bridge System
 COMMAND-DEQ IBS Integrated Bridge System Page : 1 / 15 NAVIGATION BRIDGE 1 Navigation System 1.1 General The total Navigation System is based on «IBS» concept (Integrated Bridge System) The navigation
COMMAND-DEQ IBS Integrated Bridge System Page : 1 / 15 NAVIGATION BRIDGE 1 Navigation System 1.1 General The total Navigation System is based on «IBS» concept (Integrated Bridge System) The navigation
Addendum 1.4_2. (Addendum to MX420 Operator s Manual)
") _2 (Addendum to MX420 ) September, 2007 Table of Contents About this document..1 MX575 Heading & Rate of Turn 2 MX575 as a D/GPS Compass only 2 MX575 as a D/GPS Compass with Navigation Functionality.....4
_2 (Addendum to MX420 ) September, 2007 Table of Contents About this document..1 MX575 Heading & Rate of Turn 2 MX575 as a D/GPS Compass only 2 MX575 as a D/GPS Compass with Navigation Functionality.....4
MARKSMAN DP-INS DYNAMIC POSITIONING INERTIAL REFERENCE SYSTEM
 cc MARKSMAN DP-INS DYNAMIC POSITIONING INERTIAL REFERENCE SYSTEM Sonardyne s Marksman DP-INS is an advanced navigation-based Position Measuring Equipment (PME) source for dynamically positioned (DP) rigs.
cc MARKSMAN DP-INS DYNAMIC POSITIONING INERTIAL REFERENCE SYSTEM Sonardyne s Marksman DP-INS is an advanced navigation-based Position Measuring Equipment (PME) source for dynamically positioned (DP) rigs.
Situational Awareness A Missing DP Sensor output
 Situational Awareness A Missing DP Sensor output Improving Situational Awareness in Dynamically Positioned Operations Dave Sanderson, Engineering Group Manager. Abstract Guidance Marine is at the forefront
Situational Awareness A Missing DP Sensor output Improving Situational Awareness in Dynamically Positioned Operations Dave Sanderson, Engineering Group Manager. Abstract Guidance Marine is at the forefront
NAVIGAT Fiber-Optic Gyrocompass and Attitude Reference System. Sperry Marine. The Dynamic Solution for a Demanding Challenge
 NAVIGAT 2100 Fiber-Optic Gyrocompass and Attitude Reference System Sperry Marine The Dynamic Solution for a Demanding Challenge NAVIGAT 2100 Fiber-Optic Gyrocompass and Attitude Fiber-Optic Sensor Unit
NAVIGAT 2100 Fiber-Optic Gyrocompass and Attitude Reference System Sperry Marine The Dynamic Solution for a Demanding Challenge NAVIGAT 2100 Fiber-Optic Gyrocompass and Attitude Fiber-Optic Sensor Unit
DYNAMIC POSITIONING SIMULATORS
 MARITIME SIMULATION SOLUTIONS DYNAMIC POSITIONING SIMULATORS www.nautissim.com info@nautissim.com NAUTIS - MARITIME SIMULATION SOLUTIONS BY VSTEP VSTEP s NAUTIS Simulators are DNV certified integrated
MARITIME SIMULATION SOLUTIONS DYNAMIC POSITIONING SIMULATORS www.nautissim.com info@nautissim.com NAUTIS - MARITIME SIMULATION SOLUTIONS BY VSTEP VSTEP s NAUTIS Simulators are DNV certified integrated
DYNAMIC POSITIONING CONFERENCE October 7-8, Sensors I. Field Applications and Environmental Challenges in the Use of Radascan
 Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 7-8, 28 Sensors I Field Applications and Environmental Challenges in the Use of Radascan Dr. Dominic Pearce Guidance Navigation Ltd. (Leicester,
Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 7-8, 28 Sensors I Field Applications and Environmental Challenges in the Use of Radascan Dr. Dominic Pearce Guidance Navigation Ltd. (Leicester,
Sperry Marine Northrop Grumman
 Sperry Marine 2005 Northrop Grumman Table of Contents CHAPTER 1: CHAPTER 2: CHAPTER 3: CHAPTER 4: CHAPTER 5: CHAPTER 6: WHERE ARE YOU GOING? TRANSMITTING HEADING DEVICES DETERMINING HEADING BY SATELLITE
Sperry Marine 2005 Northrop Grumman Table of Contents CHAPTER 1: CHAPTER 2: CHAPTER 3: CHAPTER 4: CHAPTER 5: CHAPTER 6: WHERE ARE YOU GOING? TRANSMITTING HEADING DEVICES DETERMINING HEADING BY SATELLITE
MARITIME SIMULATION SOLUTIONS TUG SIMULATORS
 MARITIME SIMULATION SOLUTIONS TUG SIMULATORS www.nautissim.com info@nautissim.com - 2 - NAUTIS - MARITIME SIMULATION SOLUTIONS BY VSTEP NAUTIS Simulators are DNV-GL accredited integrated simulator solutions
MARITIME SIMULATION SOLUTIONS TUG SIMULATORS www.nautissim.com info@nautissim.com - 2 - NAUTIS - MARITIME SIMULATION SOLUTIONS BY VSTEP NAUTIS Simulators are DNV-GL accredited integrated simulator solutions
The human touch in technology. Maintenance free Fiber Optic Gyro compass ALPHAFIBERCOURSE
 The human touch in technology Maintenance free Fiber Optic Gyro compass ALPHAFIBERCOURSE ALPHAFIBERCOURSE GYRO COMPASS STATE OF THE ART FOG (FIBER OPTIC) STRAPDOWN TECHNOLOGY HEADING, ROLL, PITCH AND RATE
The human touch in technology Maintenance free Fiber Optic Gyro compass ALPHAFIBERCOURSE ALPHAFIBERCOURSE GYRO COMPASS STATE OF THE ART FOG (FIBER OPTIC) STRAPDOWN TECHNOLOGY HEADING, ROLL, PITCH AND RATE
INTEGRATED NAVIGATION SYSTEMS
 INTEGRATED NAVIGATION SYSTEMS Basic terms *integrated navigation system *control system *propulsion system *cargo system *digital processing unit *sensor *electronic circuits *sensor output *pulsed input
INTEGRATED NAVIGATION SYSTEMS Basic terms *integrated navigation system *control system *propulsion system *cargo system *digital processing unit *sensor *electronic circuits *sensor output *pulsed input
A n I n t e g r a t e d S y s t e m f o r w a v e m o n i t o r i n g a n d s m a l l a n d s l o w t a r g e t s d e t e c t i o n
 A n I n t e g r a t e d S y s t e m f o r w a v e m o n i t o r i n g a n d s m a l l a n d s l o w t a r g e t s d e t e c t i o n Remocean S.p.A. P.IVA e C.F.: 06730281216 - Numero REA: NA - 835413 Registered
A n I n t e g r a t e d S y s t e m f o r w a v e m o n i t o r i n g a n d s m a l l a n d s l o w t a r g e t s d e t e c t i o n Remocean S.p.A. P.IVA e C.F.: 06730281216 - Numero REA: NA - 835413 Registered
PAP-240 Three Axis Antenna Pedestal and feed drive
 Présentation générale. ANTENNE MOTORISEE 3 AXES Versions : RxO Ku, RxO Ku&C (4 ports), RxTx Ku (2 ports), RxTx C (2 ports) PAP-240 Three Axis Antenna Pedestal and feed drive The two axis Motorized antenna
Présentation générale. ANTENNE MOTORISEE 3 AXES Versions : RxO Ku, RxO Ku&C (4 ports), RxTx Ku (2 ports), RxTx C (2 ports) PAP-240 Three Axis Antenna Pedestal and feed drive The two axis Motorized antenna
FOIL-200 OPERATORS MANUAL. Furuno Finland Oy
 FOIL-200 OPERATORS MANUAL Furuno Finland Oy www.furuno.fi TABLE OF CONTENTS FOREWORD...3 SYSTEM CONFIGURATION...4 1. GRAPHICAL USER INTERFACE (GUI)...5 1.1 Operating mode selections...6 1.2 Navigational
FOIL-200 OPERATORS MANUAL Furuno Finland Oy www.furuno.fi TABLE OF CONTENTS FOREWORD...3 SYSTEM CONFIGURATION...4 1. GRAPHICAL USER INTERFACE (GUI)...5 1.1 Operating mode selections...6 1.2 Navigational
Experiences with Fugro's Real Time GPS/GLONASS Orbit/Clock Decimeter Level Precise Positioning System
 Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 13-14, 2009 Sensors Experiences with Fugro's Real Time GPS/GLONASS Orbit/Clock Decimeter Level Precise Positioning System Ole Ørpen and
Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 13-14, 2009 Sensors Experiences with Fugro's Real Time GPS/GLONASS Orbit/Clock Decimeter Level Precise Positioning System Ole Ørpen and
ROV/IMR - OFFSHORE SUPPORT VESSEL
 ROV/IMR - OFFSHORE SUPPORT VESSEL FUJIAN MAWEI DESIGN, 86.0M X 20.0M, 100T AHC CRANE, MOONPOOL, ABS +A1 (E), SPS, DPS 2, FIFI 1, ENVIRO, OIL REC Manager NORTRANS OFFSHORE II PTE LTD Class/Notation ABS
ROV/IMR - OFFSHORE SUPPORT VESSEL FUJIAN MAWEI DESIGN, 86.0M X 20.0M, 100T AHC CRANE, MOONPOOL, ABS +A1 (E), SPS, DPS 2, FIFI 1, ENVIRO, OIL REC Manager NORTRANS OFFSHORE II PTE LTD Class/Notation ABS
GUIDELINES ON THE DESIGN AND USE OF PORTABLE PILOT UNITS INTERNATIONAL MARITIME PILOTS ASSOCIATION
 GUIDELINES ON THE DESIGN AND USE OF PORTABLE PILOT UNITS INTERNATIONAL MARITIME PILOTS ASSOCIATION WITH TECHNICAL INPUT FROM Comité International Radio-Maritime (CIRM) 2 FOREWORD With the increasing use
GUIDELINES ON THE DESIGN AND USE OF PORTABLE PILOT UNITS INTERNATIONAL MARITIME PILOTS ASSOCIATION WITH TECHNICAL INPUT FROM Comité International Radio-Maritime (CIRM) 2 FOREWORD With the increasing use
Hydroacoustic Aided Inertial Navigation System - HAIN A New Reference for DP
 Return to Session Directory Return to Session Directory Doug Phillips Failure is an Option DYNAMIC POSITIONING CONFERENCE October 9-10, 2007 Sensors Hydroacoustic Aided Inertial Navigation System - HAIN
Return to Session Directory Return to Session Directory Doug Phillips Failure is an Option DYNAMIC POSITIONING CONFERENCE October 9-10, 2007 Sensors Hydroacoustic Aided Inertial Navigation System - HAIN
The Active Heave Compensation (AHC) system makes the raising, lowering and handling of loads on floating vessels much safer and easier.
 system makes the raising, lowering and handling of loads on floating vessels much safer and easier.") Reducing the downtime of offshore operations to a minimum Rexroth hydraulic Active Heave Compensators The expression time is money is intensely relevant in the offshore, maritime and dredging sectors.
Reducing the downtime of offshore operations to a minimum Rexroth hydraulic Active Heave Compensators The expression time is money is intensely relevant in the offshore, maritime and dredging sectors.
Tightly Integrated Second Generation Acoustic-Inertial Position Reference Systems
 Return to Session Menu DYNAMIC POSITIONING CONFERENCE October 15-16, 2013 SENSORS SESSION II Tightly Integrated Second Generation Acoustic-Inertial Position Reference Systems Mark Carter Sonardyne International
Return to Session Menu DYNAMIC POSITIONING CONFERENCE October 15-16, 2013 SENSORS SESSION II Tightly Integrated Second Generation Acoustic-Inertial Position Reference Systems Mark Carter Sonardyne International
Ranger USBL Acoustic Positioning System for DP Reference and Survey
 Acoustic Positioning System for DP Reference and Survey cc 545000m N 544990m 544980m 544970m 6027910m 6027900m W 6027890m 6027880m S Contents Introduction 01 Ranger USBL System Overview 02 Ranger USBL
Acoustic Positioning System for DP Reference and Survey cc 545000m N 544990m 544980m 544970m 6027910m 6027900m W 6027890m 6027880m S Contents Introduction 01 Ranger USBL System Overview 02 Ranger USBL
Simrad R5000 IMO/Solas Type Approved Radar Systems
 Simrad R5000 IMO/Solas Type Approved Radar Systems R5000 www.navico.com/commercial R5000 Radar Systems SIMRAD R5000 Radar Systems feature a modular plug & play design making it easy to create a cost effective
Simrad R5000 IMO/Solas Type Approved Radar Systems R5000 www.navico.com/commercial R5000 Radar Systems SIMRAD R5000 Radar Systems feature a modular plug & play design making it easy to create a cost effective
Real-time position tracking of traffic ships by ARPA radar and AIS in Busan Harbor, Korea
 J Kor Soc Fish Tech 44(3) 229 238 2008 DOI:103796/KSFT2008443229 Real-time position tracking of traffic ships by radar and in Busan Harbor Korea Dae-Jae LEE* Division of Marine Production System Management
J Kor Soc Fish Tech 44(3) 229 238 2008 DOI:103796/KSFT2008443229 Real-time position tracking of traffic ships by radar and in Busan Harbor Korea Dae-Jae LEE* Division of Marine Production System Management
Rexroth launches a new generation of hydraulic Active Heave Compensators
 Reducing the Downtime of Offshore Operations to a Minimum Rexroth launches a new generation of hydraulic Active Heave Compensators The expression time is money is intensely relevant in the offshore, maritime
Reducing the Downtime of Offshore Operations to a Minimum Rexroth launches a new generation of hydraulic Active Heave Compensators The expression time is money is intensely relevant in the offshore, maritime
PANASIA, accomplishes Local manufacturing of DPS HIL Simulator
 PANASIA, accomplishes Local manufacturing of DPS HIL Simulator NEWS LETTER PANASIA, accomplishes Local manufacturing of DPS HIL Simulator (PanaHIL DP) for ships PANASIA Co., Ltd. and Hyundai Heavy Industries
PANASIA, accomplishes Local manufacturing of DPS HIL Simulator NEWS LETTER PANASIA, accomplishes Local manufacturing of DPS HIL Simulator (PanaHIL DP) for ships PANASIA Co., Ltd. and Hyundai Heavy Industries
GPS Technologies in PPUs Clarifying some misunderstandings. A presentation to the Latin American Forum, September Peter Selwyn Chief Executive
 GPS Technologies in PPUs Clarifying some misunderstandings A presentation to the Latin American Forum, September 2013 Peter Selwyn Chief Executive Photo courtesy of Flinders Ports Our Company Our staff:
GPS Technologies in PPUs Clarifying some misunderstandings A presentation to the Latin American Forum, September 2013 Peter Selwyn Chief Executive Photo courtesy of Flinders Ports Our Company Our staff:
GPS System Design and Control Modeling. Chua Shyan Jin, Ronald. Assoc. Prof Gerard Leng. Aeronautical Engineering Group, NUS
 GPS System Design and Control Modeling Chua Shyan Jin, Ronald Assoc. Prof Gerard Leng Aeronautical Engineering Group, NUS Abstract A GPS system for the autonomous navigation and surveillance of an airship
GPS System Design and Control Modeling Chua Shyan Jin, Ronald Assoc. Prof Gerard Leng Aeronautical Engineering Group, NUS Abstract A GPS system for the autonomous navigation and surveillance of an airship
Inertial Navigation System
 Apogee Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Motion Sensing & Georeferencing APOGEE SERIES makes high accuracy affordable for all surveying companies.
Apogee Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Motion Sensing & Georeferencing APOGEE SERIES makes high accuracy affordable for all surveying companies.
PHINS, An All-In-One Sensor for DP Applications
 DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
SLAM Based Approach to Dynamic Ship Positioning
 http://www.transnav.eu the International Journal on Marine Navigation and Safety of Sea Transportation Volume 8 Number 1 March 2014 DOI: 10.12716/1001.08.01.02 SLAM Based Approach to Dynamic Ship Positioning
http://www.transnav.eu the International Journal on Marine Navigation and Safety of Sea Transportation Volume 8 Number 1 March 2014 DOI: 10.12716/1001.08.01.02 SLAM Based Approach to Dynamic Ship Positioning
1 Introduction integrated 3D sonar system for underwater inspection applications
 1 Introduction The Underwater Inspection System (UIS TM ) is an integrated 3D sonar system for underwater inspection applications, specifically port and harbor construction, maintenance, port expansion,
1 Introduction The Underwater Inspection System (UIS TM ) is an integrated 3D sonar system for underwater inspection applications, specifically port and harbor construction, maintenance, port expansion,
Inertial Navigation System
 Apogee Marine Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Navigation, Motion & Heave Sensing APOGEE SERIES makes high accuracy affordable for all surveying
Apogee Marine Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Navigation, Motion & Heave Sensing APOGEE SERIES makes high accuracy affordable for all surveying
Hydrofest The Hydrographic Society in Scotland
 Hydrofest 2017 The Hydrographic Society in Scotland POSITIONING SYSTEMS Eddie Milne 1. GNSS Positioning 2. Additional Sensors 3. Alternative Positioning 4. Bringing it altogether GNSS = GPS + Glonass +
Hydrofest 2017 The Hydrographic Society in Scotland POSITIONING SYSTEMS Eddie Milne 1. GNSS Positioning 2. Additional Sensors 3. Alternative Positioning 4. Bringing it altogether GNSS = GPS + Glonass +
CODEVINTEC. Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems
 45 27 39.384 N 9 07 30.145 E Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems Aerospace Land/Automotive Marine Subsea Miniature inertial sensors 0.1 Ellipse Series New
45 27 39.384 N 9 07 30.145 E Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems Aerospace Land/Automotive Marine Subsea Miniature inertial sensors 0.1 Ellipse Series New
INS for life of field
 INS for life of field Mark Carter Business Development Manager : Inertial Oceanology 2012 Positioning Requirements Drilling Construction Pipe Lay IRM Decommissioning Rig DP (Dual Redundant) Site Survey
INS for life of field Mark Carter Business Development Manager : Inertial Oceanology 2012 Positioning Requirements Drilling Construction Pipe Lay IRM Decommissioning Rig DP (Dual Redundant) Site Survey
global acoustic positioning system GAPS usbl acoustic with integrated INS positioning system Ixsea Oceano GAPS page 1
 global acoustic positioning system usbl acoustic positioning system with integrated INS positioning system page 1 THE MERGER OF INERTIAL AND UNDERWATER ACOUSTIC TECHNOLOGIES is a unique Global Acoustic
global acoustic positioning system usbl acoustic positioning system with integrated INS positioning system page 1 THE MERGER OF INERTIAL AND UNDERWATER ACOUSTIC TECHNOLOGIES is a unique Global Acoustic
Vincent/Enfield Conductor and Flowbase Installation Review. Roy Grant, TSMarine
 Vincent/Enfield Conductor and Flowbase Installation Review Roy Grant, TSMarine Project scope Offshore installation Mobilised in Dampier (KBSB) on 10 October TSMarine scope is onshore project management
Vincent/Enfield Conductor and Flowbase Installation Review Roy Grant, TSMarine Project scope Offshore installation Mobilised in Dampier (KBSB) on 10 October TSMarine scope is onshore project management
Positioning Small AUVs for Deeper Water Surveys Using Inverted USBL
 Positioning Small AUVs for Deeper Water Surveys Using Inverted USBL Presented at Hydro12, Rotterdam, November 2012 Dr. T.M. Hiller, thiller@teledyne.com Overview Introduction to Gavia AUV Gavia Acoustic
Positioning Small AUVs for Deeper Water Surveys Using Inverted USBL Presented at Hydro12, Rotterdam, November 2012 Dr. T.M. Hiller, thiller@teledyne.com Overview Introduction to Gavia AUV Gavia Acoustic
A new Modular and Open Concept for the Maritime Integrated PNT System
 A new Modular and Open Concept for the Maritime Integrated PNT System T. Noack German Aerospace Center Institute of Communications and Navigation www.dlr.de Chart 2 MTS-2012 Maritime Integrated PNT Unit
A new Modular and Open Concept for the Maritime Integrated PNT System T. Noack German Aerospace Center Institute of Communications and Navigation www.dlr.de Chart 2 MTS-2012 Maritime Integrated PNT Unit
FOR SALE m (172'10"ft) Golden Yachts O'Neiro
 Golden Yachts O'Neiro") O'Neiro 52.70m (172'10"ft) Golden Yachts 2008 O'Neiro Motor yacht O Neiro, meaning Dream in her native Greece has been designed to offer her guests just that kind of experience during a Mediterranean yacht
O'Neiro 52.70m (172'10"ft) Golden Yachts 2008 O'Neiro Motor yacht O Neiro, meaning Dream in her native Greece has been designed to offer her guests just that kind of experience during a Mediterranean yacht
Introduction to Model-Based Design for Offshore and Marine applications C. Kleijn
 Introduction to Model-Based Design for Offshore and Marine applications C. Kleijn Model Based Design Contents Contents 1. Introduction 3 1.1. What is Model-Based Design 3 1.2. How is it used? 3 2. Benefits
Introduction to Model-Based Design for Offshore and Marine applications C. Kleijn Model Based Design Contents Contents 1. Introduction 3 1.1. What is Model-Based Design 3 1.2. How is it used? 3 2. Benefits
A Division of Engtek Manoeuvra Systems Pte Ltd. SubSea Propulsion Technology
 Engtek SubSea Systems A Division of Engtek Manoeuvra Systems Pte Ltd SubSea Propulsion Technology SubSea Hydraulic Thruster Systems The enclosed data, information, description, photos and illustrations
Engtek SubSea Systems A Division of Engtek Manoeuvra Systems Pte Ltd SubSea Propulsion Technology SubSea Hydraulic Thruster Systems The enclosed data, information, description, photos and illustrations
Applications of iusbl Technology overview
 Applications of iusbl Technology overview Tom Bennetts Project Manager Summary 1. What is iusbl and its target applications 2. Advantages of iusbl and sample data 3. Technical hurdles and Calibration methods
Applications of iusbl Technology overview Tom Bennetts Project Manager Summary 1. What is iusbl and its target applications 2. Advantages of iusbl and sample data 3. Technical hurdles and Calibration methods
ANNEX 12. RESOLUTION MSC.74(69) (adopted on 12 May 1998) ADOPTION OF NEW AND AMENDED PERFORMANCE STANDARDS
 (adopted on 12 May 1998) ADOPTION OF NEW AND AMENDED PERFORMANCE STANDARDS") RESOLUTION MSC.74(69) (adopted on 12 May 1998) ADOPTION OF NEW AND AMENDED PERFORMANCE STANDARDS THE MARITIME SAFETY COMMITTEE, RECALLING Article 28(b) of the Convention on the International Maritime Organization
RESOLUTION MSC.74(69) (adopted on 12 May 1998) ADOPTION OF NEW AND AMENDED PERFORMANCE STANDARDS THE MARITIME SAFETY COMMITTEE, RECALLING Article 28(b) of the Convention on the International Maritime Organization
GPS-Aided INS Datasheet Rev. 3.0
 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
R2009/R3016 Radar system Quick Reference Card
 R2009/R3016 Radar system Quick Reference Card EN ¼¼ Note: This document covers the products: R2009 Radar system with 9 portrait display, paired with Halo, 3G, 4G or HD radar sensors. R3016 Radar system
R2009/R3016 Radar system Quick Reference Card EN ¼¼ Note: This document covers the products: R2009 Radar system with 9 portrait display, paired with Halo, 3G, 4G or HD radar sensors. R3016 Radar system
Surveillanca & Security DIGITAL DUAL BAND ARPA RADAR SYSTEM
 Surveillanca & Security DIGITAL DUAL BAND ARPA RADAR SYSTEM X-band K a -band GEMINI-DB digital dual-band ARPA radar offers operational advantages and flexibility of operations thanks to the simultaneous
Surveillanca & Security DIGITAL DUAL BAND ARPA RADAR SYSTEM X-band K a -band GEMINI-DB digital dual-band ARPA radar offers operational advantages and flexibility of operations thanks to the simultaneous
Construction Survey Positioning Systems Wideband Fusion LBL and USBL
 cc Construction Survey Positioning Systems Wideband Fusion LBL and USBL Contents Introduction 01 Fusion USBL 02 Fusion USBL System Specifications 05 Fusion LBL 06 Fusion LBL System Specifications 09 Precise,
cc Construction Survey Positioning Systems Wideband Fusion LBL and USBL Contents Introduction 01 Fusion USBL 02 Fusion USBL System Specifications 05 Fusion LBL 06 Fusion LBL System Specifications 09 Precise,
HarborGuard-Pro. Integrated Maritime Security & Surveillance System
 HarborGuard-Pro Integrated Maritime Security & Surveillance System Klein Marine Systems, Inc. 11 Klein Drive, Salem, NH, USA 03079 Web: www.kleinmarinesystems.com This technical data and software is considered
HarborGuard-Pro Integrated Maritime Security & Surveillance System Klein Marine Systems, Inc. 11 Klein Drive, Salem, NH, USA 03079 Web: www.kleinmarinesystems.com This technical data and software is considered
DYNAMIC POSITIONING CONFERENCE October 7-8, Sensors II. Redundancy in Dynamic Positioning Systems Based on Satellite Navigation
 Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 7-8, 2008 Sensors II Redundancy in Dynamic Positioning Systems Based on Satellite Navigation Ole Ørpen, Tor Egil Melgård, Arne Norum Fugro
Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 7-8, 2008 Sensors II Redundancy in Dynamic Positioning Systems Based on Satellite Navigation Ole Ørpen, Tor Egil Melgård, Arne Norum Fugro
Dynamic Sensor. JLR-31 GPS compass RMS. the JLR-31 sets a new standard of GPS compass, with its renowned high performance and new features
 GPS compass Dynamic Sensor 3D RMS the JLR-31 sets a new standard of GPS compass, with its renowned high performance and new features 5.7-inch high visibility display Roll, pitch, rate of turn and heave
GPS compass Dynamic Sensor 3D RMS the JLR-31 sets a new standard of GPS compass, with its renowned high performance and new features 5.7-inch high visibility display Roll, pitch, rate of turn and heave
Introducing The World s First DGPS/AIS Navigation System!
 Introducing The World s First DGPS/AIS Navigation System! MX420 Navigation System: The Most Advanced DGPS/AIS Navigation Solution. MX420AIS Pioneering The Future Standards Of Navigation All navigation
Introducing The World s First DGPS/AIS Navigation System! MX420 Navigation System: The Most Advanced DGPS/AIS Navigation Solution. MX420AIS Pioneering The Future Standards Of Navigation All navigation
SBI VOL. 8 ISSUE ShipBuilding MARINE PROPULSION. EDT Jane. German Production TAILORED INNOVATION. Ndurance & Ndeavor
 SBI VOL. 8 ISSUE 1 2014 MARINE PROPULSION ShipBuilding i n d u s t r y EDT Jane ready to roll German Production TAILORED INNOVATION Ndurance & Ndeavor versatile twins 16 SBI 2014 Volume 8 Issue 1 www.shipbuilding-industry.eu
SBI VOL. 8 ISSUE 1 2014 MARINE PROPULSION ShipBuilding i n d u s t r y EDT Jane ready to roll German Production TAILORED INNOVATION Ndurance & Ndeavor versatile twins 16 SBI 2014 Volume 8 Issue 1 www.shipbuilding-industry.eu
TECHNICAL SPECIFICATION. VisionMaster FT Radar & Chart Radar Features CAT1 and ECAT2
 TECHNICAL SPECIFICATION VisionMaster FT Radar & Chart Radar Features CAT1 and ECAT2 The following specifications relate to release 4.1.3 series of VisionMaster FT (IEC62388 version) RADAR SYSTEM PERFORMANCE
TECHNICAL SPECIFICATION VisionMaster FT Radar & Chart Radar Features CAT1 and ECAT2 The following specifications relate to release 4.1.3 series of VisionMaster FT (IEC62388 version) RADAR SYSTEM PERFORMANCE
Dimensional Survey Company
 Dimensional Survey Company Services Anko Bluepix was founded in 2016 by experienced engineers, each a specialist within different segments of the survey business. Even though Anko Bluepix is a young company
Dimensional Survey Company Services Anko Bluepix was founded in 2016 by experienced engineers, each a specialist within different segments of the survey business. Even though Anko Bluepix is a young company
Essentials of Navigation
 Essentials of Navigation Latitudes & Longitudes, GPS, and more For Race Officers and Mark Boat Operators by Ed Bottrell eztrap Developer Glen Haven, Nova Scotia CANADA v13 email: info@bottrell.ca Website:
Essentials of Navigation Latitudes & Longitudes, GPS, and more For Race Officers and Mark Boat Operators by Ed Bottrell eztrap Developer Glen Haven, Nova Scotia CANADA v13 email: info@bottrell.ca Website:
Meridian Gyrocompasses
 TELEDYNE TSS WORLD LEADERS IN MARINE INSTRUMENTATION Meridian Gyrocompasses MARINE NAVIGATION SYSTEMS Highly accurate performance with low cost of ownership. The Meridian gyrocompass product range is suitable
TELEDYNE TSS WORLD LEADERS IN MARINE INSTRUMENTATION Meridian Gyrocompasses MARINE NAVIGATION SYSTEMS Highly accurate performance with low cost of ownership. The Meridian gyrocompass product range is suitable
360 compass card and digital display Performance Settle point error 0.25 secant latitude 0.10 secant latitude
 Meridian GYROCOMPASSES TECHNICAL SPECIFICATIONS Display Standard 360 compass card and digital display Surveyor Performance Settle point error 0.25 secant latitude 0.10 secant latitude Settle point repeatability
Meridian GYROCOMPASSES TECHNICAL SPECIFICATIONS Display Standard 360 compass card and digital display Surveyor Performance Settle point error 0.25 secant latitude 0.10 secant latitude Settle point repeatability
Author s Name Name of the Paper Session. DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION. Sensing Autonomy.
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION Sensing Autonomy By Arne Rinnan Kongsberg Seatex AS Abstract A certain level of autonomy is already
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION Sensing Autonomy By Arne Rinnan Kongsberg Seatex AS Abstract A certain level of autonomy is already
Intelligent Dual Channel NAVTEX Receiver System with Optional Instrument Data display
 NAV6 Intelligent Dual Channel NAVTEX Receiver System with Optional Instrument Data display High quality and reliable instrumentation with a single clear back-lit display for information, safety and security
NAV6 Intelligent Dual Channel NAVTEX Receiver System with Optional Instrument Data display High quality and reliable instrumentation with a single clear back-lit display for information, safety and security
HPC Compass NMEA Version. Installation and Operation Manual
 HPC Compass NMEA Version Installation and Operation Manual NMEA HPC COMPASS 13-1 NMEA HPC COMPASS This manual is written for the NMEA HPC Compass transducer 1.1 Edition: 1.4 May 2010 13-2 NMEA HPC COMPASS
HPC Compass NMEA Version Installation and Operation Manual NMEA HPC COMPASS 13-1 NMEA HPC COMPASS This manual is written for the NMEA HPC Compass transducer 1.1 Edition: 1.4 May 2010 13-2 NMEA HPC COMPASS
DP Operator Course Training Manual HPR
 - Hydroacoustic Position Reference System consists of transducer(s) onboard a vessel communicating with transponder(s) placed on the seabed. The transducers are lowered beneath the hull, and when a transponder
- Hydroacoustic Position Reference System consists of transducer(s) onboard a vessel communicating with transponder(s) placed on the seabed. The transducers are lowered beneath the hull, and when a transponder
Combined USBL and Inertial Navigation
 SENSORS Combined USBL and Inertial Navigation Mikael Bliksted Larsen Sonardyne International October 13-14, 2009 Return to Session Directory Combined USBL and Inertial Navigation - an alternative and improved
SENSORS Combined USBL and Inertial Navigation Mikael Bliksted Larsen Sonardyne International October 13-14, 2009 Return to Session Directory Combined USBL and Inertial Navigation - an alternative and improved
PANASIA, accomplishes Local manufacturing of DPS HIL Simulator
 PANASIA, accomplishes Local manufacturing of DPS HIL Simulator NEWS LETTER PANASIA, accomplishes Local manufacturing of DPS HIL Simulator (PanaHIL DP) for ships PANASIA Co., Ltd. and Hyundai Heavy Industries
PANASIA, accomplishes Local manufacturing of DPS HIL Simulator NEWS LETTER PANASIA, accomplishes Local manufacturing of DPS HIL Simulator (PanaHIL DP) for ships PANASIA Co., Ltd. and Hyundai Heavy Industries
Cooperative navigation (part II)
") Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Now add true dual channel side scan and Sub Bottom profile to your hydrographic surveys.
 New ROSS 4900 Series Side Scan Sonar and Sub Bottom profiler. Now add true dual channel side scan and Sub Bottom profile to your hydrographic surveys. Laboratories, well known for its line of multi channel
New ROSS 4900 Series Side Scan Sonar and Sub Bottom profiler. Now add true dual channel side scan and Sub Bottom profile to your hydrographic surveys. Laboratories, well known for its line of multi channel
Brief installation guide for FA-100 Universal AIS
 Attention: All Furuno Distributors Date: April 2, 2003 SB No: FSB02-0002 Number of Pages: 5 Brief installation guide for FA-100 Universal AIS The purpose of this document is to provide and highlight important
Attention: All Furuno Distributors Date: April 2, 2003 SB No: FSB02-0002 Number of Pages: 5 Brief installation guide for FA-100 Universal AIS The purpose of this document is to provide and highlight important
AIMS Radar Specifications
 Transmitted Frequency: Peak Radiated Power: Average Power: Antenna Beamwidth: 9.23 GHz 1 Watt (Optional 2 to 80 Watts) 6.25 microwatts up to 0.4 watts; < 1 milliwatt for most applications Fast-Scan (rotating):
Transmitted Frequency: Peak Radiated Power: Average Power: Antenna Beamwidth: 9.23 GHz 1 Watt (Optional 2 to 80 Watts) 6.25 microwatts up to 0.4 watts; < 1 milliwatt for most applications Fast-Scan (rotating):
WATER CONSERVATION AND LANDFORMING
 WATER CONSERVATION AND LANDFORMING 2 LANDFORMING INDUSTRY LEADING LANDFORMING Proven survey, field design and landforming with GNSS accuracy. Topcon offers dual-constellation (GPS + GLONASS) satellite
WATER CONSERVATION AND LANDFORMING 2 LANDFORMING INDUSTRY LEADING LANDFORMING Proven survey, field design and landforming with GNSS accuracy. Topcon offers dual-constellation (GPS + GLONASS) satellite
ATLANS-C. mobile mapping position and orientation solution
 mobile mapping position and orientation solution mobile mapping position and orientation solution THE SMALLEST ATLANS-C is a high performance all-in-one position and orientation solution for both land
mobile mapping position and orientation solution mobile mapping position and orientation solution THE SMALLEST ATLANS-C is a high performance all-in-one position and orientation solution for both land
Experiences with Hydrographic Data Budgets Using a Low-logistics AUV Platform. Thomas Hiller Teledyne Marine Systems
 Experiences with Hydrographic Data Budgets Using a Low-logistics AUV Platform Thomas Hiller Teledyne Marine Systems 1 Teledyne Marine Systems Strategic Business Units 2 What is the Gavia? The Gavia is
Experiences with Hydrographic Data Budgets Using a Low-logistics AUV Platform Thomas Hiller Teledyne Marine Systems 1 Teledyne Marine Systems Strategic Business Units 2 What is the Gavia? The Gavia is
IMR in Subsea 7 for Statoil, past and future, the new IMR vessel Seven Viking
 IMR in Subsea 7 for Statoil, past and future, the new IMR vessel Seven Viking th March 20 Bjørn Serck-Hanssen Agenda Agenda IMR Scope of Work Asset Development Drivers for 365 days operation Past - Future
IMR in Subsea 7 for Statoil, past and future, the new IMR vessel Seven Viking th March 20 Bjørn Serck-Hanssen Agenda Agenda IMR Scope of Work Asset Development Drivers for 365 days operation Past - Future
RadaScan Microwave Radar Sensor for Dynamic Positioning Operations
 RadaScan Microwave Radar Sensor for Dynamic Positioning Operations IMCA M 209 Rev. 1 January 2017 The International Marine Contractors Association (IMCA) is the international trade association representing
RadaScan Microwave Radar Sensor for Dynamic Positioning Operations IMCA M 209 Rev. 1 January 2017 The International Marine Contractors Association (IMCA) is the international trade association representing
Universidad Nacional Experimental Marítima del Caribe Vicerrectorado Académico Cátedra de Idiomas Inglés VI. Ingeniería Marítima
 Universidad Nacional Experimental Marítima del Caribe Vicerrectorado Académico Cátedra de Idiomas Inglés VI. Ingeniería Marítima UNIT II. Navigational equipment found onboard ships. Speaking. 1. Can you
Universidad Nacional Experimental Marítima del Caribe Vicerrectorado Académico Cátedra de Idiomas Inglés VI. Ingeniería Marítima UNIT II. Navigational equipment found onboard ships. Speaking. 1. Can you
Inertial Systems. Ekinox Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX SERIES R&D specialists usually compromise between high
Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX SERIES R&D specialists usually compromise between high
GPS Jamming and its impact on maritime navigation
 GPS Jamming and its impact on maritime navigation Dr Alan Grant Research and Development - Special Interest Group 10 th May 2010 Use of GPS in the maritime sector GPS has become the normal means for maritime
GPS Jamming and its impact on maritime navigation Dr Alan Grant Research and Development - Special Interest Group 10 th May 2010 Use of GPS in the maritime sector GPS has become the normal means for maritime
AMF2 MAGIC SPN INTEGRATION TO THE PRP
 AMF2 MAGIC SPN INTEGRATION TO THE PRP Overview, Cost Estimates, and Labor Tasks THIS IS A DRAFT DOCUMENT 1 SUMMARY This document provides engineering design for integration of the SPN1 Pyranometer into
AMF2 MAGIC SPN INTEGRATION TO THE PRP Overview, Cost Estimates, and Labor Tasks THIS IS A DRAFT DOCUMENT 1 SUMMARY This document provides engineering design for integration of the SPN1 Pyranometer into
GPS-Aided INS Datasheet Rev. 2.7
 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
OBSERVATORY SERVICING AND MAINTENANCE
 OBSERVATORY SERVICING AND MAINTENANCE How to deploy and maintain a network of observatories around Europe? We don t built what we cannot maintain! Jean-François DROGOU IFREMER Steve ETCHEMENDY M.B.A.R.I
OBSERVATORY SERVICING AND MAINTENANCE How to deploy and maintain a network of observatories around Europe? We don t built what we cannot maintain! Jean-François DROGOU IFREMER Steve ETCHEMENDY M.B.A.R.I
RESOLUTION A.820(19) adopted on 23 November 1995 PERFORMANCE STANDARDS FOR NAVIGATIONAL RADAR EQUIPMENT FOR HIGH-SPEED CRAFT
 adopted on 23 November 1995 PERFORMANCE STANDARDS FOR NAVIGATIONAL RADAR EQUIPMENT FOR HIGH-SPEED CRAFT") INTERNATIONAL MARITIME ORGANIZATION A 19/Res. 820 15 December 1995 Original: ENGLISH ASSEMBLY 19th session Agenda item 10 NOT TO BE REMOVED \ FROM THE IMO LIBRARY RESOLUTION A.820(19) adopted on 23 November
INTERNATIONAL MARITIME ORGANIZATION A 19/Res. 820 15 December 1995 Original: ENGLISH ASSEMBLY 19th session Agenda item 10 NOT TO BE REMOVED \ FROM THE IMO LIBRARY RESOLUTION A.820(19) adopted on 23 November
Subsea UK 2014 Developments in ROV Technology
 Subsea UK 2014 Developments in ROV Technology Smarter Technologies Enable Smarter Platforms (ROVs) => Improved Offshore Operations Nick Lawson What does an ROV do? Any ROVs primary function is to provide
Subsea UK 2014 Developments in ROV Technology Smarter Technologies Enable Smarter Platforms (ROVs) => Improved Offshore Operations Nick Lawson What does an ROV do? Any ROVs primary function is to provide
High Precision Acoustic Positioning HiPAP
 High Precision Acoustic Positioning HiPAP www.kongsberg.com The HiPAP Family: HiPAP 501 HiPAP 451 HiPAP 351 HiPAP 351P series HiPAP 101 Maximizing performance by providing The Full Picture Our mission
High Precision Acoustic Positioning HiPAP www.kongsberg.com The HiPAP Family: HiPAP 501 HiPAP 451 HiPAP 351 HiPAP 351P series HiPAP 101 Maximizing performance by providing The Full Picture Our mission
Stay connected. at sea
 Stay connected at sea 4G system for internet access in coastal areas NeptuLink FAQs by MVG How does it work? Through its two antenna transmitter-receivers NeptuLink by MVG serves as a terminal that connects
Stay connected at sea 4G system for internet access in coastal areas NeptuLink FAQs by MVG How does it work? Through its two antenna transmitter-receivers NeptuLink by MVG serves as a terminal that connects
Moving Towards a Standardized Interface for Acoustic Inertial Reference Systems
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 14-15, 2014 SENSORS SESSION Moving Towards a Standardized Interface for Acoustic Inertial Reference Systems By Mark Carter
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 14-15, 2014 SENSORS SESSION Moving Towards a Standardized Interface for Acoustic Inertial Reference Systems By Mark Carter
ORBITAL NAVIGATION SYSTEMS PRESENT AND FUTURE TENDS
 ORBITAL NAVIGATION SYSTEMS PRESENT AND FUTURE TENDS CONTENT WHAT IS COVERED A BRIEF HISTORY OF SYSTEMS PRESENT SYSTEMS IN USE PROBLEMS WITH SATELLITE SYSTEMS PLANNED IMPROVEMENTS CONCLUSION CONTENT WHAT
ORBITAL NAVIGATION SYSTEMS PRESENT AND FUTURE TENDS CONTENT WHAT IS COVERED A BRIEF HISTORY OF SYSTEMS PRESENT SYSTEMS IN USE PROBLEMS WITH SATELLITE SYSTEMS PLANNED IMPROVEMENTS CONCLUSION CONTENT WHAT
Including GNSS Based Heading in Inertial Aided GNSS DP Reference System
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 Sensors II SESSION Including GNSS Based Heading in Inertial Aided GNSS DP Reference System By Arne Rinnan, Nina
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 Sensors II SESSION Including GNSS Based Heading in Inertial Aided GNSS DP Reference System By Arne Rinnan, Nina
Product description. High Precision Acoustic Positioning system
 Product description HiPAP 350 system High Precision Acoustic Positioning system Product description 855-164557 /AA000/N/A HiPAP 350 system High Precision Acoustic Positioning system This document describes
Product description HiPAP 350 system High Precision Acoustic Positioning system Product description 855-164557 /AA000/N/A HiPAP 350 system High Precision Acoustic Positioning system This document describes
RADius, a New Contribution to Demanding. Close-up DP Operations
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors RADius, a New Contribution to Demanding Close-up DP Operations Trond Schwenke Kongsberg Seatex AS, Trondheim,
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors RADius, a New Contribution to Demanding Close-up DP Operations Trond Schwenke Kongsberg Seatex AS, Trondheim,
Prototype to product the difficult transition
 Prototype to product the difficult transition Case: K-Master Thor Hukkelås, M.Sc. Project Manager DP & Nav Product Development Kongsberg Maritime AS WORLD CLASS through people, technology and dedication
Prototype to product the difficult transition Case: K-Master Thor Hukkelås, M.Sc. Project Manager DP & Nav Product Development Kongsberg Maritime AS WORLD CLASS through people, technology and dedication
GPS-Aided INS Datasheet Rev. 2.3
 GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
FULL MISSION ENGINE ROOM SIMULATOR OFFER With touch screens solution
 FULL MISSION ENGINE ROOM SIMULATOR OFFER With touch screens solution 1.1 Components UNITEST Engine Room Simulators with touch screen solution Full mission version, including both the hardware console,
FULL MISSION ENGINE ROOM SIMULATOR OFFER With touch screens solution 1.1 Components UNITEST Engine Room Simulators with touch screen solution Full mission version, including both the hardware console,
Frank Heymann 1.
 Plausibility analysis of navigation related AIS parameter based on time series Frank Heymann 1 1 Deutsches Zentrum für Luft und Raumfahrt ev, Neustrelitz, Germany email: frank.heymann@dlr.de In this paper
Plausibility analysis of navigation related AIS parameter based on time series Frank Heymann 1 1 Deutsches Zentrum für Luft und Raumfahrt ev, Neustrelitz, Germany email: frank.heymann@dlr.de In this paper
RESOLUTION MSC.116(73) (adopted on 1 December 2000) PERFORMANCE STANDARDS FOR MARINE TRANSMITTING HEADING DEVICES (THDs)
 (adopted on 1 December 2000) PERFORMANCE STANDARDS FOR MARINE TRANSMITTING HEADING DEVICES (THDs)") MSC 73/21/Add.3 RESOLUTION MSC.116(73) THE MARITIME SAFETY COMMITTEE, RECALLING Article (28(b) of the Convention on the International Maritime Organization concerning the functions of the Committee, RECALLING
MSC 73/21/Add.3 RESOLUTION MSC.116(73) THE MARITIME SAFETY COMMITTEE, RECALLING Article (28(b) of the Convention on the International Maritime Organization concerning the functions of the Committee, RECALLING
Position reference sensors for offshore wind vessels.
 Position reference sensors for offshore wind vessels www.guidance.eu.com WHERE Gemini Wind Farm, Netherlands VESSEL Windea La Cour SYSTEM RangeGuard Monopole Guidance Marine: 2017 WINNER of the Dynamic
Position reference sensors for offshore wind vessels www.guidance.eu.com WHERE Gemini Wind Farm, Netherlands VESSEL Windea La Cour SYSTEM RangeGuard Monopole Guidance Marine: 2017 WINNER of the Dynamic
DGNSS Position Quality Information for DP Applications
 Return to Session Directory Return to Session Directory Doug Phillips Failure is an Option DYNAMIC POSITIONING CONFERENCE October 9-10, 2007 Sensors DGNSS Position Quality Information Dr. David Russell
Return to Session Directory Return to Session Directory Doug Phillips Failure is an Option DYNAMIC POSITIONING CONFERENCE October 9-10, 2007 Sensors DGNSS Position Quality Information Dr. David Russell
Force and weight measuring instruments
 JJ Force sensors and load cells JJ Hanging scales JJ Sensors for proof load testing JJ Water filled bags Force and weight measuring instruments DS_Force_and_weight_measuring_instruments 05/2016 97 Force
JJ Force sensors and load cells JJ Hanging scales JJ Sensors for proof load testing JJ Water filled bags Force and weight measuring instruments DS_Force_and_weight_measuring_instruments 05/2016 97 Force