Combined USBL and Inertial Navigation
|
|
|
- Bruce Bryant
- 5 years ago
- Views:
Transcription
1 SENSORS Combined USBL and Inertial Navigation Mikael Bliksted Larsen Sonardyne International October 13-14, 2009 Return to Session Directory


2 Combined USBL and Inertial Navigation - an alternative and improved reference for DP Dr. Mikael B. Larsen Principal Engineer, INS Sonardyne International DP Conference, October 2009, Houston
3 Agenda 1. Motivation why look at INS for DP? 2. Sensors: USBL, LUSBL and INS Concept of operation Complementary characteristics Integration how it works! 3. System configuration: Marksman DP INS New Marksman LUSBL system (1. Oct 2009) Select other components 4. Positioning i performance prediction 5. Results from development trials 6. Conclusion





4 Motivation - Why look at INS for DP? DGPS Sunspot activity / scintillation GPS can be lost for long periods of time Solar flare Weak signals watt/m2 ~ 40Watt light mile distance A simple 1 watt jammer may destroy commercial GPS in a 100km radius Unintentional jamming by faulty electronics has been seen. Improvements are pursued but issues are unlikely to entirely disappear anytime soon. Acoustic positioning Aeration clouds, masking and increase in acoustic noise level Typically short term problems. LUSBL systems largely overcome these problems through redundancy but drop outs still occur. => Third reference type with different characteristics would be useful!








5 Motivation - Why look at INS for DP? Solar flare Inertial navigation Inertial navigation is completely self contained and therefore inherently robust Earth gravity and rotation is not easily disturbed! => standalone INS is used for main navigation of e.g. nuclear submarines, ICBM s, and intercontinental airliners Continues output with very good short term accuracy But drift is unbounded in the long term INS complements acoustic positioning - what about combination?
6 Agenda 1. Motivation why look at INS for DP? 2. Sensors: USBL, LUSBL and INS Concept of operation Complementary characteristics Integration how it works! 3. System configuration: Marksman DP INS New Marksman LUSBL system (1. Oct 2009) Select other components 4. Positioning i performance prediction 5. Results from development trials 6. Conclusion

 Modern AHRS is replacing")

7 Ultra Short Baseline System (USBL) - principle of operation Roll Pitch Heading Positioning is based on measuring range and bearing from an acoustic transceiver to a seabed transponder and combining with attitude/heading. Accuracy decreases with depth: 1-2m per 1000m depth (Lodestar AHRS) Modern AHRS is replacing gyro/mru: 0.12% slant range (6m, 1DRMS) has been achieved in 4950m water depth. Operationally efficient; a single transponder is placed close to boresight. Bearing measurement is somewhat susceptible to acoustic degradation. Update rate 3-4 sec in 2000m depth ~1Hz with ping stacking (deep water)
8 Long & Ultra Short Baseline System (LUSBL) - principle of operation Positioning is based on measuring range and bearing from an acoustic transceiver to a seabed array of transponders. Redundant position solution dominated by robust range measurements. ~0.5m accuracy, also in deep water High precision Wideband acoustics allow transponders to be placed within ROV tether reach. Often installed in dual redundant or dual independent configurations. Update rate 4-5 seconds in 2000m water.


 v N")










9 Inertial Navigation System (INS) - principle of operation IMU Honeywell North accel t t (x3) v N East C... dt B Down... dt 0 0 NASA gyro (x3) Honeywell Strap-down inertial sensors Integrate gyros and transform acceleration to navigation frame t 0... dt Orientation IN EN Integrate into velocity and position. Gravity, Coriolis force, transport rate, Earth rate, NASA Coriolis Gravity An inertial navigation system does for position, orientation and velocity what a clock does for time









10 Combination of USBL and INS => DP INS -complementary characteristics INS: Good short term accuracy but long term drift USBL: Higher noise and risk of drop outs but good long term stability. DP INS: Best of both worlds





















































11 Combination of USBL and INS: How is it done? - the generic Aided INS framework
12 Agenda 1. Motivation why look at INS for DP? 2. Sensors: USBL, LUSBL and INS Concept of operation Complementary characteristics Integration how it works! 3. System configuration: Marksman DP INS New Marksman LUSBL system (1. Oct 2009) Select other components 4. Positioning i performance prediction 5. Results from development trials 6. Conclusion
13 System configuration: Marksman DP INS The Lodestar INS is the core. USBL transceiver is interfaced and powered directly by INS (perfect timing). RS485/Ethernet + DC power from bridge (single cable) GPS is only required for initial installation and transponder position New Marksman LUSBL system is the user friendly front end! Also supports conventional LUSBL mode of operation
14 Agenda 1. Motivation why look at INS for DP? 2. Sensors: USBL, LUSBL and INS Concept of operation Complementary characteristics Integration how it works! 3. System configuration: Marksman DP INS New Marksman LUSBL system (1. Oct 2009) Select other components 4. Positioning i performance prediction 5. Results from development trials 6. Conclusion




15 System components: Marksman LUSBL Design Philosophy - Reducing the operators workload DPO already has numerous computer based displays to operate produced d by different vendors. Marksman designed from the outset to be easy to use. Display uses simple red/orange/green visual feedback to provide status at a glance. Windows XP operating system provides familiar look and feel. Optional touch screen display with a user interface that was designed with the touch screen in-mind. Marksman V1 was released and shipped on the 1 st October 2009.




16 System components: Marksman LUSBL Operational Benefits - Saving time and money ROV deployable arrays. Traditionally transponders are deployed at between 15 and 20 degrees from vertical. In today s deepwater exploration this means a 2000m well would have a 700m array radius. Wideband signalling technology and better calibration software means Marksman can operate 7 degrees from vertical. This gives an array radius of only 245m in 2000m. ROV s can now reach the transponders for deployment or battery change while the vessel remains over the centre of the array.



17 Transocean s Discoverer Enterprise First operational deployment of Marksman LUSBL Deepwater trials conducted in June 2009 Lodestar used as AHRS Used vessels existing transceiver and transponders Installed and ready for use within 24 hours of arrival Performed Top Down calibration of the vessels transponder array Interfaced to Vessels DP desk Carried out DP manoeuvring tests







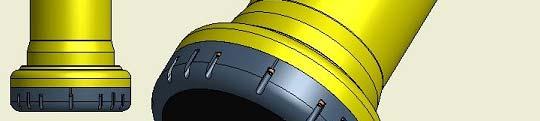


18 System components: Deployment machine, USBL transceiver and INS Tight mechanical integration to ensure stability between INS and USBL The future? Even tighter integration?
 Highest performance (non-military) inertial sensors.")

19 System components: Lodestar Acoustically Aided INS (AAINS). Key Lodestar features: Purpose designed Marine AHRS & INS, IMO certified (DP) Highest performance (non-military) inertial sensors. Proven immunity to temperature change and vibration. Good sensor stability, important for near stationary applications Inertial sensors: ,000 hrs proven MTBF Internal back-up battery no loss of power. 32GB SD internal data storage for improved diagnostics and support. Internal INS computations Added robustness Better timing No loss of IMU data Transceiver PSU Simple installation
20 Agenda 1. Motivation why look at INS for DP? 2. Sensors: USBL, LUSBL and INS Concept of operation Complementary characteristics Integration how it works! 3. System configuration: Marksman DP INS New Marksman LUSBL system (1. Oct 2009) Select other components 4. Positioning i performance prediction 5. Results from development trials 6. Conclusion
21 Performance prediction: Wideband USBL and DP INS USBL Performance Prediction - Standard Head Horizontal distance 200m. Thruster noise = 110dB//uPa.m 10m away Wideband Beacon SL = 27kHz All values 1DRMS Total error (m 1drm ms) Standard d DP reference sensors Standard survey reference sensors Lodestar AHRS Lodestar INS Lodestar INS + Ping Stacking (1.1s) Accuracy improvement Depth (m) x10 relative to conventional USBL for DP (standard gyro / MRU) x3 relative to state-of-the-art the art USBL: ~1m 2000 m depth. Further potential!
22 Agenda 1. Motivation why look at INS for DP? 2. Sensors: USBL, LUSBL and INS Concept of operation Complementary characteristics Integration how it works! 3. System configuration: Marksman DP INS New Marksman LUSBL system (1. Oct 2009) Select other components 4. Positioning i performance prediction 5. Some results from development trials 6. Conclusion







23 DP INS trials experimental results October 2008, Trondheim Fjord, Norway, sheltered 500m water depth

 DP INS")



24 DP INS trials 10x10m box manoeuvre October 2008, Trondheim, Norway HP GPS reference (~10cm) DP INS (real-time screenshoot) Pushing the limits: DP: 10 x 10 meter box (high gain) 1 Transponder, 500 meter depth. 20 second interrogation cycle Shallow over the side USBL transceiver Thruster noise (max power specified) Aeration

 5 locations Maximum thrust during transit and heading change.")
25 DP INS trials cardinal point calibration trajectory October 2008, Trondheim, Norway Attempt at worst case acoustic scenario!!! Noise and aeration purposely maximised to push limits in moderate water depth (500m) 5 locations Maximum thrust during transit and heading change. Significant ifi aeration when coming to a halt
26 DP INS trials cardinal point calibration trajectory October 2008, Trondheim, Norway aeration primarily caused by excessive thruster power when vessel is coming to a halt in combination with shallow deployment of the USBL transceiver
27 DP INS trials cardinal point calibration trajectory October 2008, Trondheim, Norway Significant improvement especially during periods of noise / aeration. Aeration typically took seconds to die out when stationary.
28 DP INS trials acoustic drop out: sec October 2008, Trondheim, Norway Introduction of 5 extra gaps in the data set No significant difference with sequence of 15 sec gaps
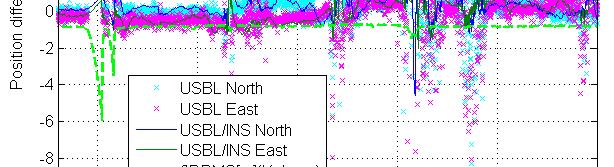
29 DP INS trials acoustic drop out: sec October 2008, Trondheim, Norway 30 sec: Beginning to see slight drift 60 sec: Drift ~0.5m to 2m, about time system should raise an alarm?
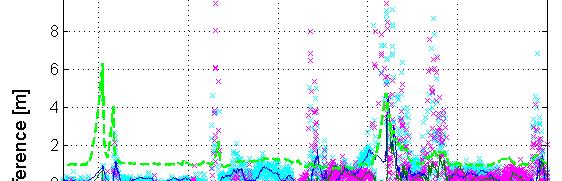
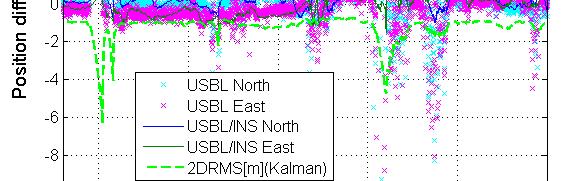
30 DP INS trials acoustic drop out: 2 and 3 minutes October 2008, Trondheim, Norway 2 minutes: Drift to just above 3m per axis, 2DRMS larger 3 minutes: Peak drift 7m
31 DP INS trials accurate velocity October 2008, Trondheim, Norway DP INS provides a very precise independent measurement of velocity - accuracy is dependant on acoustic observations but typically few cm/s. Velocity, angular rate and acceleration are valuable quantities for control!
32 Agenda 1. Motivation why look at INS for DP? 2. Sensors: USBL, LUSBL and INS Concept of operation Complementary characteristics Integration how it works! 3. System configuration: Marksman DP INS New Marksman LUSBL system (1. Oct 2009) Select other components 4. Positioning i performance prediction 5. Results from development trials 6. Conclusion
33 Summing it up -Benefits of DP INS 1. DP INS provides an alternative to LUSBL and DGPS Different concepts LUSBL: Rich acoustics and redundancy DP INS: Utilising the complementary characteristics of USBL and INS 2. Key DP INS features Improved weighting against DGPS in DP desk Ride through capability - most acoustic drop outs are short lived Simple and cost efficient installation and operation Expected to achieve 1-2m accuracy in deep water (2000m+) Position update rate1-2 Hz independent of water depth 3. Tight coupling based on good control of all technologies Mechanical stability needed between INS and USBL transceiver Electrical: No latency and simple installation Fusion of raw acoustic observation and IMU data 4. Does DP INS qualify as a third independent reference?
34 Inertial aided USBL for survey & DP vessels The End
35 A quick note on tightly vs loosely integrated INS The terms tightly and loosely coupled INS are often used inconsistently. Their origin is GPS/INS where loose integration referred to use of GPS position and tight integration referred to use of raw pseudo range observations etc. Theoretically tight integration provides better performance but often will require more engineering and increase the design complexity. With current Wideband USBL transceivers, the Lodestar INS makes use of phase and travel time information rather than acoustic position as computed by a USBL system. More importantly, raw acoustic and inertial information is combined and filtered to adaptively weight observations. Sonardyne refers to this as tightly integrated USBL. Integration will become even tighter in the future as a means to ensure performance and integrity especially under non-ideal acoustic conditions. A quick example follows for illustration purposes only. Data to the left is processed using the tightly integrated solution including a tightly integrated adaptive noise model. To be fair, the loosely coupled solution to the right could be improved by use of a better conventional noise model but would struggle to reach same performance and integrity under difficult acoustic conditions.


36 A quick note on tightly vs loosely integrated INS Not so tightly integrated solution



37 System components: Marksman LUSBL Backwards Compatible - Fast and simple to upgrade. Works with existing installed GDT USBL transceivers. and C5 Wideband transponders. Uses existing wiring Replaces Dimona HW and SW Can be installed without recalibration of existing GDT transceivers
Tightly Integrated Second Generation Acoustic-Inertial Position Reference Systems
 Return to Session Menu DYNAMIC POSITIONING CONFERENCE October 15-16, 2013 SENSORS SESSION II Tightly Integrated Second Generation Acoustic-Inertial Position Reference Systems Mark Carter Sonardyne International
Return to Session Menu DYNAMIC POSITIONING CONFERENCE October 15-16, 2013 SENSORS SESSION II Tightly Integrated Second Generation Acoustic-Inertial Position Reference Systems Mark Carter Sonardyne International
DYNAMIC POSITIONING CONFERENCE. Sensors II
 DYNAMIC POSITIONING CONFERENCE Sensors II Acoustically Aided Inertial Navigation: A Real World Experience on the Semi-Submersible Drilling Rig Petrobras XXIII Mikael Bliksted Larsen Sonardyne Int. Ltd.
DYNAMIC POSITIONING CONFERENCE Sensors II Acoustically Aided Inertial Navigation: A Real World Experience on the Semi-Submersible Drilling Rig Petrobras XXIII Mikael Bliksted Larsen Sonardyne Int. Ltd.
MARKSMAN DP-INS DYNAMIC POSITIONING INERTIAL REFERENCE SYSTEM
 cc MARKSMAN DP-INS DYNAMIC POSITIONING INERTIAL REFERENCE SYSTEM Sonardyne s Marksman DP-INS is an advanced navigation-based Position Measuring Equipment (PME) source for dynamically positioned (DP) rigs.
cc MARKSMAN DP-INS DYNAMIC POSITIONING INERTIAL REFERENCE SYSTEM Sonardyne s Marksman DP-INS is an advanced navigation-based Position Measuring Equipment (PME) source for dynamically positioned (DP) rigs.
Applications of iusbl Technology overview
 Applications of iusbl Technology overview Tom Bennetts Project Manager Summary 1. What is iusbl and its target applications 2. Advantages of iusbl and sample data 3. Technical hurdles and Calibration methods
Applications of iusbl Technology overview Tom Bennetts Project Manager Summary 1. What is iusbl and its target applications 2. Advantages of iusbl and sample data 3. Technical hurdles and Calibration methods
Hydroacoustic Aided Inertial Navigation System - HAIN A New Reference for DP
 Return to Session Directory Return to Session Directory Doug Phillips Failure is an Option DYNAMIC POSITIONING CONFERENCE October 9-10, 2007 Sensors Hydroacoustic Aided Inertial Navigation System - HAIN
Return to Session Directory Return to Session Directory Doug Phillips Failure is an Option DYNAMIC POSITIONING CONFERENCE October 9-10, 2007 Sensors Hydroacoustic Aided Inertial Navigation System - HAIN
Moving Towards a Standardized Interface for Acoustic Inertial Reference Systems
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 14-15, 2014 SENSORS SESSION Moving Towards a Standardized Interface for Acoustic Inertial Reference Systems By Mark Carter
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 14-15, 2014 SENSORS SESSION Moving Towards a Standardized Interface for Acoustic Inertial Reference Systems By Mark Carter
INS for life of field
 INS for life of field Mark Carter Business Development Manager : Inertial Oceanology 2012 Positioning Requirements Drilling Construction Pipe Lay IRM Decommissioning Rig DP (Dual Redundant) Site Survey
INS for life of field Mark Carter Business Development Manager : Inertial Oceanology 2012 Positioning Requirements Drilling Construction Pipe Lay IRM Decommissioning Rig DP (Dual Redundant) Site Survey
Acoustic INS aiding NASNet & PHINS
 NAUTRONIX MARINE TECHNOLOGY SOLUTIONS Acoustic INS aiding NASNet & PHINS Sam Hanton Aberdeen Houston Rio Positioning Options Satellites GPS, GLONASS, COMPASS Acoustics LBL, SBL, USBL Relative sensors Laser
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS Acoustic INS aiding NASNet & PHINS Sam Hanton Aberdeen Houston Rio Positioning Options Satellites GPS, GLONASS, COMPASS Acoustics LBL, SBL, USBL Relative sensors Laser
Author s Name Name of the Paper Session. PDynamic. Positioning Committee. Marine Technology Society
 Author s Name Name of the Paper Session PDynamic Positioning Committee Marine Technology Society DYNAMIC POSITIONING CONFERENCE September 17-18, 2002 Acoustic Positioning Flexible Acoustic Positioning
Author s Name Name of the Paper Session PDynamic Positioning Committee Marine Technology Society DYNAMIC POSITIONING CONFERENCE September 17-18, 2002 Acoustic Positioning Flexible Acoustic Positioning
Ranger USBL Acoustic Positioning System for DP Reference and Survey
 Acoustic Positioning System for DP Reference and Survey cc 545000m N 544990m 544980m 544970m 6027910m 6027900m W 6027890m 6027880m S Contents Introduction 01 Ranger USBL System Overview 02 Ranger USBL
Acoustic Positioning System for DP Reference and Survey cc 545000m N 544990m 544980m 544970m 6027910m 6027900m W 6027890m 6027880m S Contents Introduction 01 Ranger USBL System Overview 02 Ranger USBL
Integration of an Inertial Navigation System and DP
 Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 7-8, 28 Sensors II Integration of an Inertial Navigation System and DP Richard Stephens, Converteam UK Ltd. François Crétollier, IXSEA
Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 7-8, 28 Sensors II Integration of an Inertial Navigation System and DP Richard Stephens, Converteam UK Ltd. François Crétollier, IXSEA
PHINS, An All-In-One Sensor for DP Applications
 DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
Acoustics Digital, Spread Spectrum, DSP, Wideband What does this mean for Real World DP Operations? Jonathan Davis Sonardyne Inc
 Subsea Positioning & Communications Acoustics Digital, Spread Spectrum, DSP, Wideband What does this mean for Real World DP Operations? Jonathan Davis Sonardyne Inc Outline Introduction Signal Processing
Subsea Positioning & Communications Acoustics Digital, Spread Spectrum, DSP, Wideband What does this mean for Real World DP Operations? Jonathan Davis Sonardyne Inc Outline Introduction Signal Processing
NASNet DPR - NASNet as a deepwater acoustic DP position reference
 DYNAMIC POSITIONING CONFERENCE October 12-13, 2010 SENSORS I SESSION NASNet DPR - NASNet as a deepwater acoustic DP position reference By Sam Hanton DP Conference Houston October 12-13, 2010 Page 1 Introduction
DYNAMIC POSITIONING CONFERENCE October 12-13, 2010 SENSORS I SESSION NASNet DPR - NASNet as a deepwater acoustic DP position reference By Sam Hanton DP Conference Houston October 12-13, 2010 Page 1 Introduction
Subsea positioning through the ages
 Subsea positioning through the ages Jonathan Martin Navigation Systems Engineer Sonardyne International What is sound and how can we make use of it in navigation? Applied Voltage Induced Voltage The dawn
Subsea positioning through the ages Jonathan Martin Navigation Systems Engineer Sonardyne International What is sound and how can we make use of it in navigation? Applied Voltage Induced Voltage The dawn
DP MAINTENANCE INTRODUC INTR TION T TION O SENS T OR O SENS S OR
 DP MAINTENANCE INTRODUCTION TO SENSORS Sensors Wind Sensors PMEs Workstations Gyrocompasses Network Switchbox Network Switchbox Controller Cabinets Dual Ethernet Motion Sensors (VRU) Field Stations Thrusters
DP MAINTENANCE INTRODUCTION TO SENSORS Sensors Wind Sensors PMEs Workstations Gyrocompasses Network Switchbox Network Switchbox Controller Cabinets Dual Ethernet Motion Sensors (VRU) Field Stations Thrusters
NASNet DPR: NASNet as a Deepwater Acoustic DP Position Reference
 NAUTRONIX MARINE TECHNOLOGY SOLUTIONS NASNet DPR: NASNet as a Deepwater Acoustic DP Position Reference Aberdeen Houston Rio Overview Offshore positioning introduction Considerations of acoustic positioning
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS NASNet DPR: NASNet as a Deepwater Acoustic DP Position Reference Aberdeen Houston Rio Overview Offshore positioning introduction Considerations of acoustic positioning
WORLD CLASS through people, technology and dedication WORLD CLASS through people, technology and dedication
 WORLD CLASS through people, technology and dedication WORLD CLASS through people, technology and dedication 1 2 Acoustic Positioning Systems Hydrofest Aberdeen University Wednesday 31 st March Ian Florence
WORLD CLASS through people, technology and dedication WORLD CLASS through people, technology and dedication 1 2 Acoustic Positioning Systems Hydrofest Aberdeen University Wednesday 31 st March Ian Florence
Subsea Positioning In deep water
 Subsea Positioning In deep water PETRONAS - PETRAD - INTSOK CCOP DEEPWATER SUBSEA TIE-BACK Damai Puri Resort & Spa, Kuching, Sarawak, MALAYSIA 24TH - 26TH January, 2011 Supplier to the oil & gas industry
Subsea Positioning In deep water PETRONAS - PETRAD - INTSOK CCOP DEEPWATER SUBSEA TIE-BACK Damai Puri Resort & Spa, Kuching, Sarawak, MALAYSIA 24TH - 26TH January, 2011 Supplier to the oil & gas industry
WORLD CLASS through people, technology and dedication
 WORLD CLASS through people, technology and dedication WORLD CLASS through people, technology and dedication 1 2 Acoustic Positioning Systems Hydrofest Robert Gordon University Scott Sutherland Building
WORLD CLASS through people, technology and dedication WORLD CLASS through people, technology and dedication 1 2 Acoustic Positioning Systems Hydrofest Robert Gordon University Scott Sutherland Building
GPS-Aided INS Datasheet Rev. 2.6
 GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
GPS-Aided INS Datasheet Rev. 2.7
 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
GPS-Aided INS Datasheet Rev. 3.0
 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
08/10/2013. Marine Positioning Systems Surface and Underwater Positioning. egm502 seafloor mapping
 egm502 seafloor mapping lecture 8 navigation and positioning Marine Positioning Systems Surface and Underwater Positioning All observations at sea need to be related to a geographical position. To precisely
egm502 seafloor mapping lecture 8 navigation and positioning Marine Positioning Systems Surface and Underwater Positioning All observations at sea need to be related to a geographical position. To precisely
Inertial Systems. Ekinox Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX SERIES R&D specialists usually compromise between high
Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX SERIES R&D specialists usually compromise between high
Inertial Navigation System
 Apogee Marine Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Navigation, Motion & Heave Sensing APOGEE SERIES makes high accuracy affordable for all surveying
Apogee Marine Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Navigation, Motion & Heave Sensing APOGEE SERIES makes high accuracy affordable for all surveying
RADius, a New Contribution to Demanding. Close-up DP Operations
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors RADius, a New Contribution to Demanding Close-up DP Operations Trond Schwenke Kongsberg Seatex AS, Trondheim,
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors RADius, a New Contribution to Demanding Close-up DP Operations Trond Schwenke Kongsberg Seatex AS, Trondheim,
Including GNSS Based Heading in Inertial Aided GNSS DP Reference System
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 Sensors II SESSION Including GNSS Based Heading in Inertial Aided GNSS DP Reference System By Arne Rinnan, Nina
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 Sensors II SESSION Including GNSS Based Heading in Inertial Aided GNSS DP Reference System By Arne Rinnan, Nina
global acoustic positioning system GAPS usbl acoustic with integrated INS positioning system Ixsea Oceano GAPS page 1
 global acoustic positioning system usbl acoustic positioning system with integrated INS positioning system page 1 THE MERGER OF INERTIAL AND UNDERWATER ACOUSTIC TECHNOLOGIES is a unique Global Acoustic
global acoustic positioning system usbl acoustic positioning system with integrated INS positioning system page 1 THE MERGER OF INERTIAL AND UNDERWATER ACOUSTIC TECHNOLOGIES is a unique Global Acoustic
GPS-Aided INS Datasheet Rev. 2.3
 GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
LBL POSITIONING AND COMMUNICATION SYSTEMS PRODUCT INFORMATION GUIDE
 LBL POSITIONING AND COMMUNICATION SYSTEMS PRODUCT INFORMATION GUIDE EvoLogics S2C LBL Underwater Positioning and Communication Systems EvoLogics LBL systems bring the benefi ts of long baseline (LBL) acoustic
LBL POSITIONING AND COMMUNICATION SYSTEMS PRODUCT INFORMATION GUIDE EvoLogics S2C LBL Underwater Positioning and Communication Systems EvoLogics LBL systems bring the benefi ts of long baseline (LBL) acoustic
Construction Survey Positioning Systems Wideband Fusion LBL and USBL
 cc Construction Survey Positioning Systems Wideband Fusion LBL and USBL Contents Introduction 01 Fusion USBL 02 Fusion USBL System Specifications 05 Fusion LBL 06 Fusion LBL System Specifications 09 Precise,
cc Construction Survey Positioning Systems Wideband Fusion LBL and USBL Contents Introduction 01 Fusion USBL 02 Fusion USBL System Specifications 05 Fusion LBL 06 Fusion LBL System Specifications 09 Precise,
ACOUSTIC POSITIONING SYSTEMS A PRACTICAL OVERVIEW OF CURRENT SYSTEMS
 DYNAMIC POSITIONING CONFERENCE October 13 14, 1998 SENSORS ACOUSTIC POSITIONING SYSTEMS A PRACTICAL OVERVIEW OF CURRENT SYSTEMS Keith Vickery Sonardyne, Inc. ACOUSTIC POSITIONING SYSTEMS A PRACTICAL OVERVIEW
DYNAMIC POSITIONING CONFERENCE October 13 14, 1998 SENSORS ACOUSTIC POSITIONING SYSTEMS A PRACTICAL OVERVIEW OF CURRENT SYSTEMS Keith Vickery Sonardyne, Inc. ACOUSTIC POSITIONING SYSTEMS A PRACTICAL OVERVIEW
CODEVINTEC. Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems
 45 27 39.384 N 9 07 30.145 E Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems Aerospace Land/Automotive Marine Subsea Miniature inertial sensors 0.1 Ellipse Series New
45 27 39.384 N 9 07 30.145 E Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems Aerospace Land/Automotive Marine Subsea Miniature inertial sensors 0.1 Ellipse Series New
Motion Reference Units
 Motion Reference Units MRU IP-67 sealed 5% / 5 cm Heave accuracy 0.03 m/sec Velocity accuracy 0.05 deg Pitch and Roll accuracy 0.005 m/sec 2 Acceleration accuracy 0.0002 deg/sec Angular rate accuracy NMEA
Motion Reference Units MRU IP-67 sealed 5% / 5 cm Heave accuracy 0.03 m/sec Velocity accuracy 0.05 deg Pitch and Roll accuracy 0.005 m/sec 2 Acceleration accuracy 0.0002 deg/sec Angular rate accuracy NMEA
Inertial Navigation System
 Apogee Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Motion Sensing & Georeferencing APOGEE SERIES makes high accuracy affordable for all surveying companies.
Apogee Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Motion Sensing & Georeferencing APOGEE SERIES makes high accuracy affordable for all surveying companies.
Inertial Sensors. Ellipse 2 Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Motion Reference Units
 Motion Reference Units MRU Datasheet Rev. 1.3 IP-67 sealed 5% / 5 cm Heave accuracy 0.03 m/sec Velocity accuracy 0.05 deg Pitch and Roll accuracy 0.005 m/sec2 Acceleration accuracy 0.0002 deg/sec Angular
Motion Reference Units MRU Datasheet Rev. 1.3 IP-67 sealed 5% / 5 cm Heave accuracy 0.03 m/sec Velocity accuracy 0.05 deg Pitch and Roll accuracy 0.005 m/sec2 Acceleration accuracy 0.0002 deg/sec Angular
Inertial Sensors. Ellipse 2 Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Inertial Sensors. Ellipse Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
AN AIDED NAVIGATION POST PROCESSING FILTER FOR DETAILED SEABED MAPPING UUVS
 MODELING, IDENTIFICATION AND CONTROL, 1999, VOL. 20, NO. 3, 165-175 doi: 10.4173/mic.1999.3.2 AN AIDED NAVIGATION POST PROCESSING FILTER FOR DETAILED SEABED MAPPING UUVS Kenneth Gade and Bjørn Jalving
MODELING, IDENTIFICATION AND CONTROL, 1999, VOL. 20, NO. 3, 165-175 doi: 10.4173/mic.1999.3.2 AN AIDED NAVIGATION POST PROCESSING FILTER FOR DETAILED SEABED MAPPING UUVS Kenneth Gade and Bjørn Jalving
USBL positioning and communication SyStEmS. product information GUidE
 USBL positioning and communication SyStEmS product information GUidE evologics s2c R usbl - series underwater positioning and communication systems EvoLogics S2CR USBL is a series of combined positioning
USBL positioning and communication SyStEmS product information GUidE evologics s2c R usbl - series underwater positioning and communication systems EvoLogics S2CR USBL is a series of combined positioning
HIGH-ACCURACY GYROCOMPASS
 HIGH-ACCURACY GYROCOMPASS and INERTIAL NAVIGATION PRODUCTS NAVAL NAVIGATION LAND NAVIGATION & POINTING AIR NAVIGATION COMMERCIAL & INDUSTRIAL GEM elettronica is a leading European supplier in the design,
HIGH-ACCURACY GYROCOMPASS and INERTIAL NAVIGATION PRODUCTS NAVAL NAVIGATION LAND NAVIGATION & POINTING AIR NAVIGATION COMMERCIAL & INDUSTRIAL GEM elettronica is a leading European supplier in the design,
SERIES VECTORNAV TACTICAL SERIES VN-110 IMU/AHRS VN-210 GNSS/INS VN-310 DUAL GNSS/INS
 TACTICAL VECTORNAV SERIES TACTICAL SERIES VN110 IMU/AHRS VN210 GNSS/INS VN310 DUAL GNSS/INS VectorNav introduces the Tactical Series, a nextgeneration, MEMS inertial navigation platform that features highperformance
TACTICAL VECTORNAV SERIES TACTICAL SERIES VN110 IMU/AHRS VN210 GNSS/INS VN310 DUAL GNSS/INS VectorNav introduces the Tactical Series, a nextgeneration, MEMS inertial navigation platform that features highperformance
High Precision Acoustic Positioning HiPAP
 High Precision Acoustic Positioning HiPAP www.kongsberg.com The HiPAP Family: HiPAP 501 HiPAP 451 HiPAP 351 HiPAP 351P series HiPAP 101 Maximizing performance by providing The Full Picture Our mission
High Precision Acoustic Positioning HiPAP www.kongsberg.com The HiPAP Family: HiPAP 501 HiPAP 451 HiPAP 351 HiPAP 351P series HiPAP 101 Maximizing performance by providing The Full Picture Our mission
Inertial Sensors. Ellipse Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.2 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.2 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Motion & Navigation Solution
 Navsight Land & Air Solution Motion & Navigation Solution FOR SURVEYING APPLICATIONS Motion, Navigation, and Geo-referencing NAVSIGHT LAND/AIR SOLUTION is a full high performance inertial navigation solution
Navsight Land & Air Solution Motion & Navigation Solution FOR SURVEYING APPLICATIONS Motion, Navigation, and Geo-referencing NAVSIGHT LAND/AIR SOLUTION is a full high performance inertial navigation solution
USBL positioning and communication systems. Applications
 USBL positioning and communication systems Offering a powerful USBL transceiver functionality with full benefits of an S2C technology communication link Applications Positioning of offshore equipment >
USBL positioning and communication systems Offering a powerful USBL transceiver functionality with full benefits of an S2C technology communication link Applications Positioning of offshore equipment >
Utilizing Batch Processing for GNSS Signal Tracking
 Utilizing Batch Processing for GNSS Signal Tracking Andrey Soloviev Avionics Engineering Center, Ohio University Presented to: ION Alberta Section, Calgary, Canada February 27, 2007 Motivation: Outline
Utilizing Batch Processing for GNSS Signal Tracking Andrey Soloviev Avionics Engineering Center, Ohio University Presented to: ION Alberta Section, Calgary, Canada February 27, 2007 Motivation: Outline
Hybrid system using both USBL and LBL for shallow waters
 OI2013 Underwater Positioning & Communication Hybrid system using both USBL and LBL for shallow waters Nicolas LARUELLE Sales Manager at OSEAN September 4th,2013 OI2013 Page 1 OVERVIEW SPECIFICATIONS PRINCIPLES
OI2013 Underwater Positioning & Communication Hybrid system using both USBL and LBL for shallow waters Nicolas LARUELLE Sales Manager at OSEAN September 4th,2013 OI2013 Page 1 OVERVIEW SPECIFICATIONS PRINCIPLES
CENG 5931 HW 5 Mobile Robotics Due March 5. Sensors for Mobile Robots
 CENG 5931 HW 5 Mobile Robotics Due March 5 Sensors for Mobile Robots Dr. T. L. Harman: 281 283-3774 Office D104 For reports: Read HomeworkEssayRequirements on the web site and follow instructions which
CENG 5931 HW 5 Mobile Robotics Due March 5 Sensors for Mobile Robots Dr. T. L. Harman: 281 283-3774 Office D104 For reports: Read HomeworkEssayRequirements on the web site and follow instructions which
Inertial Systems. Ekinox 2 Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox 2 Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.02 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX 2 SERIES R&D specialists usually compromise between
Ekinox 2 Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.02 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX 2 SERIES R&D specialists usually compromise between
Inertial Systems. Ekinox 2 Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox 2 Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.02 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX 2 SERIES R&D specialists usually compromise between
Ekinox 2 Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.02 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX 2 SERIES R&D specialists usually compromise between
Hvordan forbedre sikkerheten og effektiviteten ved ankerhåndteringsoperasjoner?
 Hvordan forbedre sikkerheten og effektiviteten ved ankerhåndteringsoperasjoner? KM s new design thinking for Offshore Marine Operations Marintekniske Dager 2013 Trondheim, 9. 10.oktober Thor Hukkelås,
Hvordan forbedre sikkerheten og effektiviteten ved ankerhåndteringsoperasjoner? KM s new design thinking for Offshore Marine Operations Marintekniske Dager 2013 Trondheim, 9. 10.oktober Thor Hukkelås,
NovAtel SPAN and Waypoint GNSS + INS Technology
 NovAtel SPAN and Waypoint GNSS + INS Technology SPAN Technology SPAN provides real-time positioning and attitude determination where traditional GNSS receivers have difficulties; in urban canyons or heavily
NovAtel SPAN and Waypoint GNSS + INS Technology SPAN Technology SPAN provides real-time positioning and attitude determination where traditional GNSS receivers have difficulties; in urban canyons or heavily
NovAtel s. Performance Analysis October Abstract. SPAN on OEM6. SPAN on OEM6. Enhancements
 NovAtel s SPAN on OEM6 Performance Analysis October 2012 Abstract SPAN, NovAtel s GNSS/INS solution, is now available on the OEM6 receiver platform. In addition to rapid GNSS signal reacquisition performance,
NovAtel s SPAN on OEM6 Performance Analysis October 2012 Abstract SPAN, NovAtel s GNSS/INS solution, is now available on the OEM6 receiver platform. In addition to rapid GNSS signal reacquisition performance,
Dynamically Positioned and Thruster Assisted Position Moored Vessels
 Dynamically Positioned and Thruster Assisted Position Moored Vessels Professor Asgeir J. Sørensen, Department of Marine Technology, Norwegian University of Science and Technology, Otto Nielsens Vei 10,
Dynamically Positioned and Thruster Assisted Position Moored Vessels Professor Asgeir J. Sørensen, Department of Marine Technology, Norwegian University of Science and Technology, Otto Nielsens Vei 10,
If you want to use an inertial measurement system...
 If you want to use an inertial measurement system...... which technical data you should analyse and compare before making your decision by Dr.-Ing. E. v. Hinueber, imar Navigation GmbH Keywords: inertial
If you want to use an inertial measurement system...... which technical data you should analyse and compare before making your decision by Dr.-Ing. E. v. Hinueber, imar Navigation GmbH Keywords: inertial
Tsunami Detection System Nick Street, Project Engineer David Mould, Presenter.
 Tsunami Detection System Nick Street, Project Engineer David Mould, Presenter Agenda 1. Need for Tsunami Detection System 2. System Overview 3. Tsunami Detection System requirements 4. Seabed Unit - Tsunameter
Tsunami Detection System Nick Street, Project Engineer David Mould, Presenter Agenda 1. Need for Tsunami Detection System 2. System Overview 3. Tsunami Detection System requirements 4. Seabed Unit - Tsunameter
Acoustic Positioning combined with Data Monitoring and Subsea Controls in a Future Field Concept
 Acoustic Positioning combined with Data Monitoring and Subsea Controls in a Future Field Concept APSG Fall Meeting 2009 Bill Gilmour VP Sales (Americas) Structure of the presentation Nautronix ADS 2 Technology
Acoustic Positioning combined with Data Monitoring and Subsea Controls in a Future Field Concept APSG Fall Meeting 2009 Bill Gilmour VP Sales (Americas) Structure of the presentation Nautronix ADS 2 Technology
Kongsberg Seatex AS Pirsenteret N-7462 Trondheim Norway POSITION 303 VELOCITY 900 HEADING 910 ATTITUDE 413 HEAVE 888
 WinFrog Device Group: Device Name/Model: Device Manufacturer: Device Data String(s) Output to WinFrog: WinFrog Data String(s) Output to Device: WinFrog Data Item(s) and their RAW record: GPS SEAPATH Kongsberg
WinFrog Device Group: Device Name/Model: Device Manufacturer: Device Data String(s) Output to WinFrog: WinFrog Data String(s) Output to Device: WinFrog Data Item(s) and their RAW record: GPS SEAPATH Kongsberg
and Vehicle Sensors in Urban Environment
 AvailabilityImprovement ofrtk GPS GPSwithIMU and Vehicle Sensors in Urban Environment ION GPS/GNSS 2012 Tk Tokyo University it of Marine Si Science and Technology Nobuaki Kubo, Chen Dihan 1 Contents Background
AvailabilityImprovement ofrtk GPS GPSwithIMU and Vehicle Sensors in Urban Environment ION GPS/GNSS 2012 Tk Tokyo University it of Marine Si Science and Technology Nobuaki Kubo, Chen Dihan 1 Contents Background
NovAtel SPAN and Waypoint. GNSS + INS Technology
 NovAtel SPAN and Waypoint GNSS + INS Technology SPAN Technology SPAN provides continual 3D positioning, velocity and attitude determination anywhere satellite reception may be compromised. SPAN uses NovAtel
NovAtel SPAN and Waypoint GNSS + INS Technology SPAN Technology SPAN provides continual 3D positioning, velocity and attitude determination anywhere satellite reception may be compromised. SPAN uses NovAtel
Survey Sensors. 18/04/2018 Danny Wake Group Surveyor i-tech Services
 Survey Sensors 18/04/2018 Danny Wake Group Surveyor i-tech Services What do we need sensors for? For pure hydrographic surveying: Depth measurements Hazard identification Seabed composition Tides & currents
Survey Sensors 18/04/2018 Danny Wake Group Surveyor i-tech Services What do we need sensors for? For pure hydrographic surveying: Depth measurements Hazard identification Seabed composition Tides & currents
DYNAMIC POSITIONING CONFERENCE
 DYNAMIC POSITIONING CONFERENCE Advances in DGPS Systems 28 September 2004 Ole Ørpen Fugro Seastar, Oslo, Norway SCOPE OF PRESENTATION -Background. -Carrier Phase Based Solutions. -Orbit/Clock Solutions.
DYNAMIC POSITIONING CONFERENCE Advances in DGPS Systems 28 September 2004 Ole Ørpen Fugro Seastar, Oslo, Norway SCOPE OF PRESENTATION -Background. -Carrier Phase Based Solutions. -Orbit/Clock Solutions.
MARINE TECHNOLOGY SOCIETY. DYNAMIC POSITIONING CONFERENCE, HOUSTON September 28-30, Advances in DGPS Systems
 Author s Name Name of the Paper Session MARINE TECHNOLOGY SOCIETY DYNAMIC POSITIONING CONFERENCE, HOUSTON September 28-30, 2004 Sensors Advances in DGPS Systems Ole Ørpen Fugro Seastar AS (Oslo, Norway)
Author s Name Name of the Paper Session MARINE TECHNOLOGY SOCIETY DYNAMIC POSITIONING CONFERENCE, HOUSTON September 28-30, 2004 Sensors Advances in DGPS Systems Ole Ørpen Fugro Seastar AS (Oslo, Norway)
DP Operator Course Training Manual HPR
 - Hydroacoustic Position Reference System consists of transducer(s) onboard a vessel communicating with transponder(s) placed on the seabed. The transducers are lowered beneath the hull, and when a transponder
- Hydroacoustic Position Reference System consists of transducer(s) onboard a vessel communicating with transponder(s) placed on the seabed. The transducers are lowered beneath the hull, and when a transponder
ASC IMU 7.X.Y. Inertial Measurement Unit (IMU) Description.
 Description.") Inertial Measurement Unit (IMU) 6-axis MEMS mini-imu Acceleration & Angular Rotation analog output 12-pin connector with detachable cable Aluminium housing Made in Germany Features Acceleration rate: ±2g
Inertial Measurement Unit (IMU) 6-axis MEMS mini-imu Acceleration & Angular Rotation analog output 12-pin connector with detachable cable Aluminium housing Made in Germany Features Acceleration rate: ±2g
Deep. Navigating the. High Accuracy Positioning Support for Deep Water Construction. Copyright Journal of Ocean Technology 2017
 Navigating the Deep High Accuracy Positioning Support for Deep Water Construction by Will Primavesi, Tamir Frydenrych, and Drew Nicholson ISTOCKPHOTO.COM/CHERT61 The Journal of Ocean Technology, Vol. 12,
Navigating the Deep High Accuracy Positioning Support for Deep Water Construction by Will Primavesi, Tamir Frydenrych, and Drew Nicholson ISTOCKPHOTO.COM/CHERT61 The Journal of Ocean Technology, Vol. 12,
Revisions Revision Date By Changes A 11 Feb 2013 MHA Initial release , Xsens Technologies B.V. All rights reserved. Information in this docum
 MTi 10-series and MTi 100-series Document MT0503P, Revision 0 (DRAFT), 11 Feb 2013 Xsens Technologies B.V. Pantheon 6a P.O. Box 559 7500 AN Enschede The Netherlands phone +31 (0)88 973 67 00 fax +31 (0)88
MTi 10-series and MTi 100-series Document MT0503P, Revision 0 (DRAFT), 11 Feb 2013 Xsens Technologies B.V. Pantheon 6a P.O. Box 559 7500 AN Enschede The Netherlands phone +31 (0)88 973 67 00 fax +31 (0)88
Structure Deflection Monitoring System
 Structure Deflection Monitoring System Generation II All rights reserved. This document may be distributed within receiving entity (from RTS/Seatronics) and utilized as tender documentation. However, due
Structure Deflection Monitoring System Generation II All rights reserved. This document may be distributed within receiving entity (from RTS/Seatronics) and utilized as tender documentation. However, due
Autonomous Underwater Vehicle Navigation.
 Autonomous Underwater Vehicle Navigation. We are aware that electromagnetic energy cannot propagate appreciable distances in the ocean except at very low frequencies. As a result, GPS-based and other such
Autonomous Underwater Vehicle Navigation. We are aware that electromagnetic energy cannot propagate appreciable distances in the ocean except at very low frequencies. As a result, GPS-based and other such
RESOLUTION MSC.116(73) (adopted on 1 December 2000) PERFORMANCE STANDARDS FOR MARINE TRANSMITTING HEADING DEVICES (THDs)
 (adopted on 1 December 2000) PERFORMANCE STANDARDS FOR MARINE TRANSMITTING HEADING DEVICES (THDs)") MSC 73/21/Add.3 RESOLUTION MSC.116(73) THE MARITIME SAFETY COMMITTEE, RECALLING Article (28(b) of the Convention on the International Maritime Organization concerning the functions of the Committee, RECALLING
MSC 73/21/Add.3 RESOLUTION MSC.116(73) THE MARITIME SAFETY COMMITTEE, RECALLING Article (28(b) of the Convention on the International Maritime Organization concerning the functions of the Committee, RECALLING
Experimental Validation of the Moving Long Base-Line Navigation Concept
 Experimental Validation of the Moving Long Base-Line Navigation Concept Jérôme Vaganay (1), John J. Leonard (2), Joseph A. Curcio (2), J. Scott Willcox (1) (1) Bluefin Robotics Corporation 237 Putnam Avenue
Experimental Validation of the Moving Long Base-Line Navigation Concept Jérôme Vaganay (1), John J. Leonard (2), Joseph A. Curcio (2), J. Scott Willcox (1) (1) Bluefin Robotics Corporation 237 Putnam Avenue
Baseline. Tracking, positioning and monitoring technologies for reservoir surveillance THE CUSTOMER MAGAZINE FROM SONARDYNE ISSUE 12.
 cc 04 Kit Can t choose which Compatt you need? We pick our top four 14 Product Focus Fusion 6G The reasons to invest in the world s most trusted LBL solution 20 Subsea Asset Monitoring Sonardyne joins
cc 04 Kit Can t choose which Compatt you need? We pick our top four 14 Product Focus Fusion 6G The reasons to invest in the world s most trusted LBL solution 20 Subsea Asset Monitoring Sonardyne joins
Problem Areas of DGPS
 DYNAMIC POSITIONING CONFERENCE October 13 14, 1998 SENSORS Problem Areas of DGPS R. H. Prothero & G. McKenzie Racal NCS Inc. (Houston) Table of Contents 1.0 ABSTRACT... 2 2.0 A TYPICAL DGPS CONFIGURATION...
DYNAMIC POSITIONING CONFERENCE October 13 14, 1998 SENSORS Problem Areas of DGPS R. H. Prothero & G. McKenzie Racal NCS Inc. (Houston) Table of Contents 1.0 ABSTRACT... 2 2.0 A TYPICAL DGPS CONFIGURATION...
SERIES VECTORNAV INDUSTRIAL SERIES VN-100 IMU/AHRS VN-200 GPS/INS VN-300 DUAL GNSS/INS
 TACTICAL VECTORNAV SERIES INDUSTRIAL SERIES VN100 IMU/AHRS VN200 GPS/INS VN300 DUAL GNSS/INS VectorNav presents the Industrial Series, a complete line of MEMSbased, industrialgrade inertial navigation
TACTICAL VECTORNAV SERIES INDUSTRIAL SERIES VN100 IMU/AHRS VN200 GPS/INS VN300 DUAL GNSS/INS VectorNav presents the Industrial Series, a complete line of MEMSbased, industrialgrade inertial navigation
TACTICAL SERIES VECTORNAV INDUSTRIAL SERIES. Key Benefits Miniaturized surface mount & Rugged packaging. < 30 grams. Embedded Navigation Solutions
 TACTICAL SERIES VECTORNAV INDUSTRIAL SERIES VN100 IMU/AH AHRS VN200 GPS/INS VN300 DUAL GNSS/INS Key Benefits Miniaturized surface mount & Rugged packaging < 30 grams Embedded Navigation Solutions THE INDUSTRIAL
TACTICAL SERIES VECTORNAV INDUSTRIAL SERIES VN100 IMU/AH AHRS VN200 GPS/INS VN300 DUAL GNSS/INS Key Benefits Miniaturized surface mount & Rugged packaging < 30 grams Embedded Navigation Solutions THE INDUSTRIAL
High Performance Advanced MEMS Industrial & Tactical Grade Inertial Measurement Units
 High Performance Advanced MEMS Industrial & Tactical Grade Inertial Measurement Units ITAR-free Small size, low weight, low cost 1 deg/hr Gyro Bias in-run stability Datasheet Rev.2.0 5 μg Accelerometers
High Performance Advanced MEMS Industrial & Tactical Grade Inertial Measurement Units ITAR-free Small size, low weight, low cost 1 deg/hr Gyro Bias in-run stability Datasheet Rev.2.0 5 μg Accelerometers
Dynamic Angle Estimation
 Dynamic Angle Estimation with Inertial MEMS Analog Devices Bob Scannell Mark Looney Agenda Sensor to angle basics Accelerometer basics Accelerometer behaviors Gyroscope basics Gyroscope behaviors Key factors
Dynamic Angle Estimation with Inertial MEMS Analog Devices Bob Scannell Mark Looney Agenda Sensor to angle basics Accelerometer basics Accelerometer behaviors Gyroscope basics Gyroscope behaviors Key factors
Underwater Acoustic Communication and Positioning State of the Art and New Uses
 Underwater Acoustic Communication and Positioning State of the Art and New Uses Radio signals Work only on very short distances Salty water particularly problematic No underwater GPS Cables Too heavy,
Underwater Acoustic Communication and Positioning State of the Art and New Uses Radio signals Work only on very short distances Salty water particularly problematic No underwater GPS Cables Too heavy,
Experiences with Fugro's Real Time GPS/GLONASS Orbit/Clock Decimeter Level Precise Positioning System
 Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 13-14, 2009 Sensors Experiences with Fugro's Real Time GPS/GLONASS Orbit/Clock Decimeter Level Precise Positioning System Ole Ørpen and
Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 13-14, 2009 Sensors Experiences with Fugro's Real Time GPS/GLONASS Orbit/Clock Decimeter Level Precise Positioning System Ole Ørpen and
New developments in offshore precise GNSS positioning
 New developments in offshore precise GNSS positioning Kees de Jong Fugro Intersite B.V. November 2013 Contents Profile Mission is to be the world s leading service-provider in the collection and interpretation
New developments in offshore precise GNSS positioning Kees de Jong Fugro Intersite B.V. November 2013 Contents Profile Mission is to be the world s leading service-provider in the collection and interpretation
3DM-GX4-45 LORD DATASHEET. GPS-Aided Inertial Navigation System (GPS/INS) Product Highlights. Features and Benefits. Applications
 Product Highlights. Features and Benefits. Applications") LORD DATASHEET 3DM-GX4-45 GPS-Aided Inertial Navigation System (GPS/INS) Product Highlights High performance integd GPS receiver and MEMS sensor technology provide direct and computed PVA outputs in a
LORD DATASHEET 3DM-GX4-45 GPS-Aided Inertial Navigation System (GPS/INS) Product Highlights High performance integd GPS receiver and MEMS sensor technology provide direct and computed PVA outputs in a
Gyrocompass and motion sensor. octans. navigation and positioning
 Gyrocompass and motion sensor octans navigation and positioning the best in fog technology The technological heart of is the Fibre-Optic Gyroscope (FOG), the only truly-solid-state answer to rotation sensing.
Gyrocompass and motion sensor octans navigation and positioning the best in fog technology The technological heart of is the Fibre-Optic Gyroscope (FOG), the only truly-solid-state answer to rotation sensing.
Advances in Subsea Integrity Monitoring Systems. Ross Macleod Business Development Director, Ashtead Technology
 Advances in Subsea Integrity Monitoring Systems Ross Macleod Business Development Director, Ashtead Technology Introduction to Ashtead Technology The market leading independent subsea sensor and ROV equipment
Advances in Subsea Integrity Monitoring Systems Ross Macleod Business Development Director, Ashtead Technology Introduction to Ashtead Technology The market leading independent subsea sensor and ROV equipment
Integration of Inertial Measurements with GNSS -NovAtel SPAN Architecture-
 Integration of Inertial Measurements with GNSS -NovAtel SPAN Architecture- Sandy Kennedy, Jason Hamilton NovAtel Inc., Canada Edgar v. Hinueber imar GmbH, Germany ABSTRACT As a GNSS system manufacturer,
Integration of Inertial Measurements with GNSS -NovAtel SPAN Architecture- Sandy Kennedy, Jason Hamilton NovAtel Inc., Canada Edgar v. Hinueber imar GmbH, Germany ABSTRACT As a GNSS system manufacturer,
SPAN Technology System Characteristics and Performance
 SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
FLCS V2.1. AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station
 AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
HiPAP HIGH PRECISION ACOUSTIC POSITIONING
 HiPAP HIGH PRECISION ACOUSTIC POSITIONING OUR MISSION We shall earn the respect and recognition for our dedication to provide innovative and reliable marine electronics that ensure optimal operation at
HiPAP HIGH PRECISION ACOUSTIC POSITIONING OUR MISSION We shall earn the respect and recognition for our dedication to provide innovative and reliable marine electronics that ensure optimal operation at
1 Introduction integrated 3D sonar system for underwater inspection applications
 1 Introduction The Underwater Inspection System (UIS TM ) is an integrated 3D sonar system for underwater inspection applications, specifically port and harbor construction, maintenance, port expansion,
1 Introduction The Underwater Inspection System (UIS TM ) is an integrated 3D sonar system for underwater inspection applications, specifically port and harbor construction, maintenance, port expansion,
Marine Construction Support & Dimensional Control
 Page 1 of 5 Marine Construction Support & Dimensional Control Key Specifications Surface and Subsurface Positioning IRM Support Lay Support Trench Suport Installation Support Metrology As-Built Heavy Lift
Page 1 of 5 Marine Construction Support & Dimensional Control Key Specifications Surface and Subsurface Positioning IRM Support Lay Support Trench Suport Installation Support Metrology As-Built Heavy Lift
3DM -CV5-10 LORD DATASHEET. Inertial Measurement Unit (IMU) Product Highlights. Features and Benefits. Applications. Best in Class Performance
 Product Highlights. Features and Benefits. Applications. Best in Class Performance") LORD DATASHEET 3DM -CV5-10 Inertial Measurement Unit (IMU) Product Highlights Triaxial accelerometer, gyroscope, and sensors achieve the optimal combination of measurement qualities Smallest, lightest,
LORD DATASHEET 3DM -CV5-10 Inertial Measurement Unit (IMU) Product Highlights Triaxial accelerometer, gyroscope, and sensors achieve the optimal combination of measurement qualities Smallest, lightest,
Positioning Small AUVs for Deeper Water Surveys Using Inverted USBL
 Positioning Small AUVs for Deeper Water Surveys Using Inverted USBL Presented at Hydro12, Rotterdam, November 2012 Dr. T.M. Hiller, thiller@teledyne.com Overview Introduction to Gavia AUV Gavia Acoustic
Positioning Small AUVs for Deeper Water Surveys Using Inverted USBL Presented at Hydro12, Rotterdam, November 2012 Dr. T.M. Hiller, thiller@teledyne.com Overview Introduction to Gavia AUV Gavia Acoustic
ADMA. Automotive Dynamic Motion Analyzer with 1000 Hz. ADMA Applications. State of the art: ADMA GPS/Inertial System for vehicle dynamics testing
 ADMA Automotive Dynamic Motion Analyzer with 1000 Hz State of the art: ADMA GPS/Inertial System for vehicle dynamics testing ADMA Applications The strap-down technology ensures that the ADMA is stable
ADMA Automotive Dynamic Motion Analyzer with 1000 Hz State of the art: ADMA GPS/Inertial System for vehicle dynamics testing ADMA Applications The strap-down technology ensures that the ADMA is stable
A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology
 A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology Tatyana Bourke, Applanix Corporation Abstract This paper describes a post-processing software package that
A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology Tatyana Bourke, Applanix Corporation Abstract This paper describes a post-processing software package that
Author s Name Name of the Paper Session. DYNAMIC POSITIONING CONFERENCE October 8-10, 2012 SENSORS II SESSION
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 8-10, 2012 SENSORS II SESSION Acoustically Aided Inertial Navigation - Proven, Robust, and Efficient, Positioning Solutions
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 8-10, 2012 SENSORS II SESSION Acoustically Aided Inertial Navigation - Proven, Robust, and Efficient, Positioning Solutions
Mean currents and turbulence, plus wave height, direction and ice tracking
 Mean currents and turbulence, plus wave height, direction and ice tracking The ADCP is designed for flexibility. It measures current profiles at up to 8 Hz sampling frequency. It can also measure direct
Mean currents and turbulence, plus wave height, direction and ice tracking The ADCP is designed for flexibility. It measures current profiles at up to 8 Hz sampling frequency. It can also measure direct
MARINS Series. Very high performance inertial navigation system
 MARINS Series Very high performance inertial navigation system MARINS M-Series Very high-performance inertial navigation system MARINS M-Series is a family of state-of-the-art naval inertial navigation
MARINS Series Very high performance inertial navigation system MARINS M-Series Very high-performance inertial navigation system MARINS M-Series is a family of state-of-the-art naval inertial navigation
TORSTEIN PEDERSEN. Improving the Common DVL: A New Standard in Doppler Velocity Logs
 TORSTEIN PEDERSEN Improving the Common DVL: A New Standard in Doppler Velocity Logs VOLVO OCEAN RACE 2011 Precursor to Nortek s DVL story Nortek Background for DVLs Technology Company with expertise in
TORSTEIN PEDERSEN Improving the Common DVL: A New Standard in Doppler Velocity Logs VOLVO OCEAN RACE 2011 Precursor to Nortek s DVL story Nortek Background for DVLs Technology Company with expertise in