08/10/2013. Marine Positioning Systems Surface and Underwater Positioning. egm502 seafloor mapping
|
|
|
- Mitchell O’Neal’
- 5 years ago
- Views:
Transcription

 and (c) which area of the seafloor is insonified.")
 information.")
 and their relative variations in attitude.")
1 egm502 seafloor mapping lecture 8 navigation and positioning Marine Positioning Systems Surface and Underwater Positioning All observations at sea need to be related to a geographical position. To precisely locate the position of features imaged on the seabed, we need to know (a) where the survey vessel is located (on the sea-surface), (b) where the sonar platform is located (below the sea-surface) and (c) which area of the seafloor is insonified. This precise positional data is given by a combination of position fixing (latitude, longitude and altitude above a reference datum), heading, speed and attitude (heave, roll, pitch, yaw) information. The remainder of this lecture will detail the techniques used for measuring the position of the survey vessel at the sea-surface, the position of the sonar platform (if not attached to the vessel) and their relative variations in attitude. (a) Surface (Ship) Positioning Since the GPS revolution in the early 1990s, ship positioning techniques have changed in ease and accuracy. Majority of offshore navigation systems superseded by the GPS system commercially released in 1993 (see MAR101 lecture notes for details). Global Positioning System comprises a constellation of 24 satellites in synchronous orbits, associated ground stations and user equipment. 1

, it can identify errors in the satellite signal time measurement, compute a correction and transmit the correction to the roving")

 a satellite differential service provider.")
2 The resolution of GPS can be enhanced with Differential GPS (DGPS). In DGPS, a high-precision GPS reference station receiver is surveyed-in with centimetric accuracy and its position is programmed to memory. satellite constellation The reference station calculates its position using the same satellites as the ship. As the reference station knows its exact position (pre-programmed), it can identify errors in the satellite signal time measurement, compute a correction and transmit the correction to the roving receiver (survey vessel). Corrections update regularly (typically every second) and broadcast to the survey vessel. This technique works because the satellite signal time distortion is almost identical for any 2 points on the Earth which are less than 500km apart. error corrections reference station (fixed receiver, known position) remote station (roving receiver) Differential corrections can be obtained from several sources: (a) your own base station, (b) the worldwide network of DGPS radio-beacons, or (c) a satellite differential service provider. The network of DGPS radio-beacons throughout the world is rapidly expanding and the signals that most radio-beacons transmit are free. There are also a number of satellite differential service provider options including subscription services you pay for, and now the Wide Area Augmentation System (WAAS) or EGNOS satellite systems for the US and Europe respectively that will improve integrity, accuracy and availability of GPS for users. For very high precision surveys, sub-metre DGPS accuracy is not enough. That's where centimetre-level solutions using Real-Time Kinematic (RTK) can provide even greater accuracy. 2
 by manually calculating how far it lies behind and below the ship, or (ii) by using acoustic techniques. Klein Associates Inc.")
3 (b) Sub-surface (Towfish) Positioning In many applications, the sonar platform (towfish) is towed by the ship, sometimes only a few metres above the seafloor. The towfish may be positioned two ways: (i) by manually calculating how far it lies behind and below the ship, or (ii) by using acoustic techniques. Klein Associates Inc., 2005 (i) Manual Positioning The Towfish Layback is the distance the towfish is being towed behind the vessel. It is important to remember that the sonar image data is not being generated at the tow vessel but at the towfish. Also remember that the GPS fix being generated is where the GPS antenna is located on the tow vessel not where the towfish is. The lay back correction can be calculated fairly accurately by using the Pythagorean theorem. The information you need is as follows: (1) The amount of cable that has been deployed (the hypotenuse). (2) Establishing the depth of the towfish (one leg of the right triangle). This can be obtained by subtracting the height of the towfish off the bottom (a measurement made on the sonar record) from the total depth of the water (ships depth sounder). Layback = Cable Deployed 2 Towfish Depth 2 (ii) Acoustic Positioning Acoustic positioning systems are base don two types of configuration: short baseline (SBL) and long baseline (LBL): LBL (Long BaseLine) An LBL system has two parts or segments: The first segment comprises a number of acoustic Transponder Beacons moored in fixed locations on the seabed. The positions of the Beacons are described in a co-ordinate frame fixed to the seabed. The distances between them form the "baselines" used by the system. The second segment comprises an acoustic transducer on a Transceiver which is normally temporarily installed on the vessel - or on a Tow Fish. USBL (Ultra Short BaseLine) USBL principles are very similar to SBL principles (in which an array of acoustic transducers is deployed on the surface vessel) except that the transducers are all built into a single transceiver assembly - or the array of transducers is replaced by an array of transducer elements in a single transceiver assembly. The distances or ranges are measured as they are in an SBL system but the time differences are now much less. Systems using sinusoidal signals measure the "time-phase" of the signal in each element with respect to a reference in the receiver. The "time-phase differences" between transducer elements are computed by subtraction and then the system is equivalent to an SBL system. 3












4 Ormen Lange field located in the Norwegian Sea, 100 km north-west of the coast of Mid-Norway. Historic wrecks in 170m water depth. Søreide and Jasinski, in press Søreide and Jasinski, in press Case Study Fredrik Søreide and Marek E. Jasinski - Ormen Lange DeepWater Shipwreck Excavation (IJNA, in press) 4



 to track how the vessel is moving.")
 and then sums them to find the total change from the initial position.")
5 (c) Attitude Information The final issue of which portion of the seafloor is being insonified is addressed by measuring the attitude of the ship or sonar platform. J.E. Hughes Clarke, OMG/UNB Søreide and Jasinski, in press Four types of movement are recognised: heave, roll, pitch and yaw. EXAMPLE SYSTEM Inertial Measurement Unit (IMU) or Motion Referencing Unit (MRU) An Inertial Measurement Unit is a closed system that is used to detect altitude, location, and motion. Typically installed on survey vessels, it normally uses a combination of accelerometers and angular rate sensors (gyroscopes) to track how the vessel is moving. Typically, an IMU detects the current acceleration and rate of change in attitude (i.e. pitch, roll and yaw rates) and then sums them to find the total change from the initial position. These corrections are then applied to the geophysical data to correct for the effects of pitch, roll and yaw. An IMU stands in contrast to the GPS system, which uses external satellites to detect the current position. 5
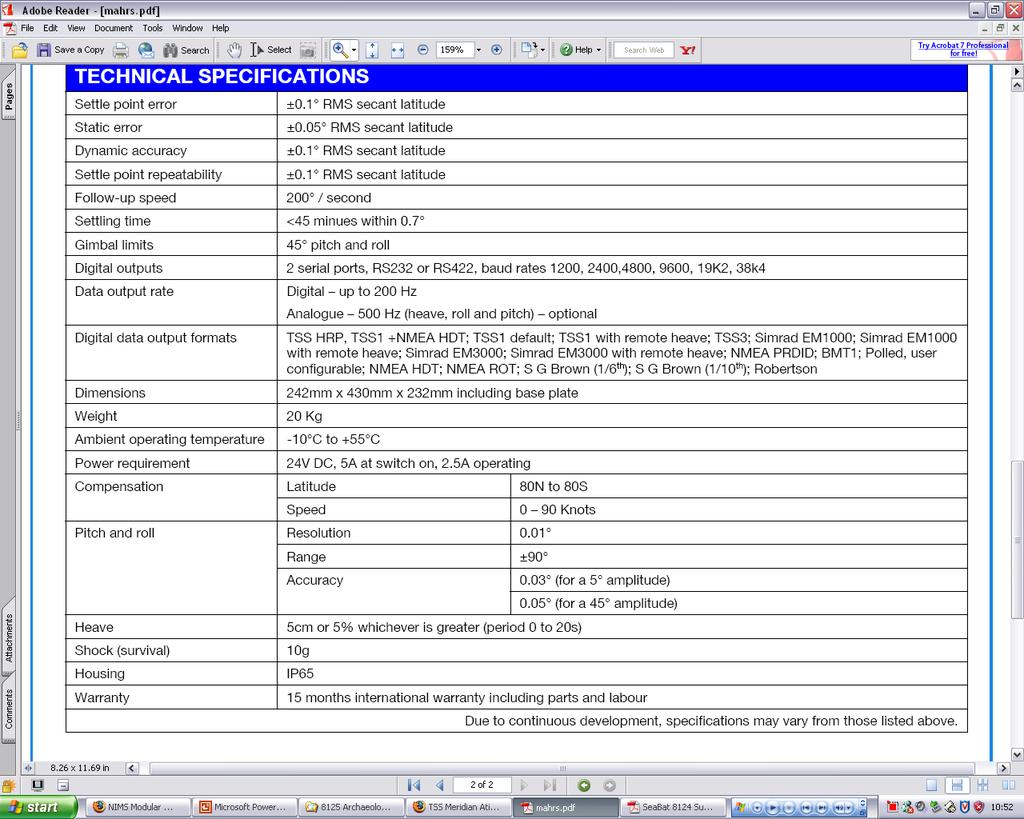
6 WITHOUT COMPENSATION WITH COMPENSATION 6
Hydroacoustic Aided Inertial Navigation System - HAIN A New Reference for DP
 Return to Session Directory Return to Session Directory Doug Phillips Failure is an Option DYNAMIC POSITIONING CONFERENCE October 9-10, 2007 Sensors Hydroacoustic Aided Inertial Navigation System - HAIN
Return to Session Directory Return to Session Directory Doug Phillips Failure is an Option DYNAMIC POSITIONING CONFERENCE October 9-10, 2007 Sensors Hydroacoustic Aided Inertial Navigation System - HAIN
Subsea Positioning In deep water
 Subsea Positioning In deep water PETRONAS - PETRAD - INTSOK CCOP DEEPWATER SUBSEA TIE-BACK Damai Puri Resort & Spa, Kuching, Sarawak, MALAYSIA 24TH - 26TH January, 2011 Supplier to the oil & gas industry
Subsea Positioning In deep water PETRONAS - PETRAD - INTSOK CCOP DEEPWATER SUBSEA TIE-BACK Damai Puri Resort & Spa, Kuching, Sarawak, MALAYSIA 24TH - 26TH January, 2011 Supplier to the oil & gas industry
INS for life of field
 INS for life of field Mark Carter Business Development Manager : Inertial Oceanology 2012 Positioning Requirements Drilling Construction Pipe Lay IRM Decommissioning Rig DP (Dual Redundant) Site Survey
INS for life of field Mark Carter Business Development Manager : Inertial Oceanology 2012 Positioning Requirements Drilling Construction Pipe Lay IRM Decommissioning Rig DP (Dual Redundant) Site Survey
Applications of iusbl Technology overview
 Applications of iusbl Technology overview Tom Bennetts Project Manager Summary 1. What is iusbl and its target applications 2. Advantages of iusbl and sample data 3. Technical hurdles and Calibration methods
Applications of iusbl Technology overview Tom Bennetts Project Manager Summary 1. What is iusbl and its target applications 2. Advantages of iusbl and sample data 3. Technical hurdles and Calibration methods
DP MAINTENANCE INTRODUC INTR TION T TION O SENS T OR O SENS S OR
 DP MAINTENANCE INTRODUCTION TO SENSORS Sensors Wind Sensors PMEs Workstations Gyrocompasses Network Switchbox Network Switchbox Controller Cabinets Dual Ethernet Motion Sensors (VRU) Field Stations Thrusters
DP MAINTENANCE INTRODUCTION TO SENSORS Sensors Wind Sensors PMEs Workstations Gyrocompasses Network Switchbox Network Switchbox Controller Cabinets Dual Ethernet Motion Sensors (VRU) Field Stations Thrusters
Experiences with Hydrographic Data Budgets Using a Low-logistics AUV Platform. Thomas Hiller Teledyne Marine Systems
 Experiences with Hydrographic Data Budgets Using a Low-logistics AUV Platform Thomas Hiller Teledyne Marine Systems 1 Teledyne Marine Systems Strategic Business Units 2 What is the Gavia? The Gavia is
Experiences with Hydrographic Data Budgets Using a Low-logistics AUV Platform Thomas Hiller Teledyne Marine Systems 1 Teledyne Marine Systems Strategic Business Units 2 What is the Gavia? The Gavia is
PHINS, An All-In-One Sensor for DP Applications
 DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
Acoustic INS aiding NASNet & PHINS
 NAUTRONIX MARINE TECHNOLOGY SOLUTIONS Acoustic INS aiding NASNet & PHINS Sam Hanton Aberdeen Houston Rio Positioning Options Satellites GPS, GLONASS, COMPASS Acoustics LBL, SBL, USBL Relative sensors Laser
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS Acoustic INS aiding NASNet & PHINS Sam Hanton Aberdeen Houston Rio Positioning Options Satellites GPS, GLONASS, COMPASS Acoustics LBL, SBL, USBL Relative sensors Laser
NASNet DPR: NASNet as a Deepwater Acoustic DP Position Reference
 NAUTRONIX MARINE TECHNOLOGY SOLUTIONS NASNet DPR: NASNet as a Deepwater Acoustic DP Position Reference Aberdeen Houston Rio Overview Offshore positioning introduction Considerations of acoustic positioning
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS NASNet DPR: NASNet as a Deepwater Acoustic DP Position Reference Aberdeen Houston Rio Overview Offshore positioning introduction Considerations of acoustic positioning
Survey Sensors. 18/04/2018 Danny Wake Group Surveyor i-tech Services
 Survey Sensors 18/04/2018 Danny Wake Group Surveyor i-tech Services What do we need sensors for? For pure hydrographic surveying: Depth measurements Hazard identification Seabed composition Tides & currents
Survey Sensors 18/04/2018 Danny Wake Group Surveyor i-tech Services What do we need sensors for? For pure hydrographic surveying: Depth measurements Hazard identification Seabed composition Tides & currents
global acoustic positioning system GAPS usbl acoustic with integrated INS positioning system Ixsea Oceano GAPS page 1
 global acoustic positioning system usbl acoustic positioning system with integrated INS positioning system page 1 THE MERGER OF INERTIAL AND UNDERWATER ACOUSTIC TECHNOLOGIES is a unique Global Acoustic
global acoustic positioning system usbl acoustic positioning system with integrated INS positioning system page 1 THE MERGER OF INERTIAL AND UNDERWATER ACOUSTIC TECHNOLOGIES is a unique Global Acoustic
Construction Survey Positioning Systems Wideband Fusion LBL and USBL
 cc Construction Survey Positioning Systems Wideband Fusion LBL and USBL Contents Introduction 01 Fusion USBL 02 Fusion USBL System Specifications 05 Fusion LBL 06 Fusion LBL System Specifications 09 Precise,
cc Construction Survey Positioning Systems Wideband Fusion LBL and USBL Contents Introduction 01 Fusion USBL 02 Fusion USBL System Specifications 05 Fusion LBL 06 Fusion LBL System Specifications 09 Precise,
Inertial Systems. Ekinox Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX SERIES R&D specialists usually compromise between high
Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX SERIES R&D specialists usually compromise between high
MARKSMAN DP-INS DYNAMIC POSITIONING INERTIAL REFERENCE SYSTEM
 cc MARKSMAN DP-INS DYNAMIC POSITIONING INERTIAL REFERENCE SYSTEM Sonardyne s Marksman DP-INS is an advanced navigation-based Position Measuring Equipment (PME) source for dynamically positioned (DP) rigs.
cc MARKSMAN DP-INS DYNAMIC POSITIONING INERTIAL REFERENCE SYSTEM Sonardyne s Marksman DP-INS is an advanced navigation-based Position Measuring Equipment (PME) source for dynamically positioned (DP) rigs.
Inertial Navigation System
 Apogee Marine Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Navigation, Motion & Heave Sensing APOGEE SERIES makes high accuracy affordable for all surveying
Apogee Marine Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Navigation, Motion & Heave Sensing APOGEE SERIES makes high accuracy affordable for all surveying
CODEVINTEC. Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems
 45 27 39.384 N 9 07 30.145 E Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems Aerospace Land/Automotive Marine Subsea Miniature inertial sensors 0.1 Ellipse Series New
45 27 39.384 N 9 07 30.145 E Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems Aerospace Land/Automotive Marine Subsea Miniature inertial sensors 0.1 Ellipse Series New
Subsea positioning through the ages
 Subsea positioning through the ages Jonathan Martin Navigation Systems Engineer Sonardyne International What is sound and how can we make use of it in navigation? Applied Voltage Induced Voltage The dawn
Subsea positioning through the ages Jonathan Martin Navigation Systems Engineer Sonardyne International What is sound and how can we make use of it in navigation? Applied Voltage Induced Voltage The dawn
Inertial Navigation System
 Apogee Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Motion Sensing & Georeferencing APOGEE SERIES makes high accuracy affordable for all surveying companies.
Apogee Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Motion Sensing & Georeferencing APOGEE SERIES makes high accuracy affordable for all surveying companies.
Kongsberg Seatex AS Pirsenteret N-7462 Trondheim Norway POSITION 303 VELOCITY 900 HEADING 910 ATTITUDE 413 HEAVE 888
 WinFrog Device Group: Device Name/Model: Device Manufacturer: Device Data String(s) Output to WinFrog: WinFrog Data String(s) Output to Device: WinFrog Data Item(s) and their RAW record: GPS SEAPATH Kongsberg
WinFrog Device Group: Device Name/Model: Device Manufacturer: Device Data String(s) Output to WinFrog: WinFrog Data String(s) Output to Device: WinFrog Data Item(s) and their RAW record: GPS SEAPATH Kongsberg
FieldGenius Technical Notes GPS Terminology
 FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
Applanix Products and Solutions for Hydrographic Survey & Marine Applications Maximize Your Productivity!
 Applanix Products and Solutions for Hydrographic Survey & Marine Applications Maximize Your Productivity! Applanix technology and support gives you the advantage: lower costs of deployment, faster times
Applanix Products and Solutions for Hydrographic Survey & Marine Applications Maximize Your Productivity! Applanix technology and support gives you the advantage: lower costs of deployment, faster times
WORLD CLASS through people, technology and dedication WORLD CLASS through people, technology and dedication
 WORLD CLASS through people, technology and dedication WORLD CLASS through people, technology and dedication 1 2 Acoustic Positioning Systems Hydrofest Aberdeen University Wednesday 31 st March Ian Florence
WORLD CLASS through people, technology and dedication WORLD CLASS through people, technology and dedication 1 2 Acoustic Positioning Systems Hydrofest Aberdeen University Wednesday 31 st March Ian Florence
GPS and Recent Alternatives for Localisation. Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney
 GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
USBL positioning and communication SyStEmS. product information GUidE
 USBL positioning and communication SyStEmS product information GUidE evologics s2c R usbl - series underwater positioning and communication systems EvoLogics S2CR USBL is a series of combined positioning
USBL positioning and communication SyStEmS product information GUidE evologics s2c R usbl - series underwater positioning and communication systems EvoLogics S2CR USBL is a series of combined positioning
Ranger USBL Acoustic Positioning System for DP Reference and Survey
 Acoustic Positioning System for DP Reference and Survey cc 545000m N 544990m 544980m 544970m 6027910m 6027900m W 6027890m 6027880m S Contents Introduction 01 Ranger USBL System Overview 02 Ranger USBL
Acoustic Positioning System for DP Reference and Survey cc 545000m N 544990m 544980m 544970m 6027910m 6027900m W 6027890m 6027880m S Contents Introduction 01 Ranger USBL System Overview 02 Ranger USBL
UNITED NATIONS UNIVERSITY Institute for Environment & Human Security (UNU-EHS) Bonn, Germany
 Bonn, Germany") UNITED NATIONS UNIVERSITY Institute for Environment & Human Security (UNU-EHS) Bonn, Germany Introduction to GPS technology Prof. Dr. Jörg Szarzynski Education Programme Director Head of Section EduSphere
UNITED NATIONS UNIVERSITY Institute for Environment & Human Security (UNU-EHS) Bonn, Germany Introduction to GPS technology Prof. Dr. Jörg Szarzynski Education Programme Director Head of Section EduSphere
WORLD CLASS through people, technology and dedication
 WORLD CLASS through people, technology and dedication WORLD CLASS through people, technology and dedication 1 2 Acoustic Positioning Systems Hydrofest Robert Gordon University Scott Sutherland Building
WORLD CLASS through people, technology and dedication WORLD CLASS through people, technology and dedication 1 2 Acoustic Positioning Systems Hydrofest Robert Gordon University Scott Sutherland Building
Side-Scan Sonar Presentation STS
 Training Module Side-Scan Sonar Presentation STS SIDE-SCAN SONAR SAFETY Training Module Content: This module includes information on: Types of Side-Scan Benefits and Disadvantages System Configuration
Training Module Side-Scan Sonar Presentation STS SIDE-SCAN SONAR SAFETY Training Module Content: This module includes information on: Types of Side-Scan Benefits and Disadvantages System Configuration
CENG 5931 HW 5 Mobile Robotics Due March 5. Sensors for Mobile Robots
 CENG 5931 HW 5 Mobile Robotics Due March 5 Sensors for Mobile Robots Dr. T. L. Harman: 281 283-3774 Office D104 For reports: Read HomeworkEssayRequirements on the web site and follow instructions which
CENG 5931 HW 5 Mobile Robotics Due March 5 Sensors for Mobile Robots Dr. T. L. Harman: 281 283-3774 Office D104 For reports: Read HomeworkEssayRequirements on the web site and follow instructions which
Experiences with Fugro's Real Time GPS/GLONASS Orbit/Clock Decimeter Level Precise Positioning System
 Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 13-14, 2009 Sensors Experiences with Fugro's Real Time GPS/GLONASS Orbit/Clock Decimeter Level Precise Positioning System Ole Ørpen and
Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 13-14, 2009 Sensors Experiences with Fugro's Real Time GPS/GLONASS Orbit/Clock Decimeter Level Precise Positioning System Ole Ørpen and
METIS Second Master Training & Seminar. Augmentation Systems Available in Egypt
 METIS Second Master Training & Seminar Augmentation Systems Available in Egypt By Eng. Ramadan Salem M. Sc. Surveying and Geodesy Email: ramadan_salem@link.net Page 1 Augmentation Systems Available in
METIS Second Master Training & Seminar Augmentation Systems Available in Egypt By Eng. Ramadan Salem M. Sc. Surveying and Geodesy Email: ramadan_salem@link.net Page 1 Augmentation Systems Available in
GPS: The Basics. Darrell R. Dean, Jr. Civil and Environmental Engineering West Virginia University. Expected Learning Outcomes for GPS
 GPS: The Basics Darrell R. Dean, Jr. Civil and Environmental Engineering West Virginia University Expected Learning Outcomes for GPS Explain the acronym GPS Name 3 important tdt dates in history of GPS
GPS: The Basics Darrell R. Dean, Jr. Civil and Environmental Engineering West Virginia University Expected Learning Outcomes for GPS Explain the acronym GPS Name 3 important tdt dates in history of GPS
Motion Reference Units
 Motion Reference Units MRU Datasheet Rev. 1.3 IP-67 sealed 5% / 5 cm Heave accuracy 0.03 m/sec Velocity accuracy 0.05 deg Pitch and Roll accuracy 0.005 m/sec2 Acceleration accuracy 0.0002 deg/sec Angular
Motion Reference Units MRU Datasheet Rev. 1.3 IP-67 sealed 5% / 5 cm Heave accuracy 0.03 m/sec Velocity accuracy 0.05 deg Pitch and Roll accuracy 0.005 m/sec2 Acceleration accuracy 0.0002 deg/sec Angular
1 Introduction integrated 3D sonar system for underwater inspection applications
 1 Introduction The Underwater Inspection System (UIS TM ) is an integrated 3D sonar system for underwater inspection applications, specifically port and harbor construction, maintenance, port expansion,
1 Introduction The Underwater Inspection System (UIS TM ) is an integrated 3D sonar system for underwater inspection applications, specifically port and harbor construction, maintenance, port expansion,
The Global Positioning System
 The Global Positioning System 5-1 US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites
The Global Positioning System 5-1 US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites
AN AIDED NAVIGATION POST PROCESSING FILTER FOR DETAILED SEABED MAPPING UUVS
 MODELING, IDENTIFICATION AND CONTROL, 1999, VOL. 20, NO. 3, 165-175 doi: 10.4173/mic.1999.3.2 AN AIDED NAVIGATION POST PROCESSING FILTER FOR DETAILED SEABED MAPPING UUVS Kenneth Gade and Bjørn Jalving
MODELING, IDENTIFICATION AND CONTROL, 1999, VOL. 20, NO. 3, 165-175 doi: 10.4173/mic.1999.3.2 AN AIDED NAVIGATION POST PROCESSING FILTER FOR DETAILED SEABED MAPPING UUVS Kenneth Gade and Bjørn Jalving
Navigation Sensor Technology Aids Marine Seismic Survey
 Page 1 of 5 Navigation Sensor Technology Aids Marine Seismic Survey Al Hise, NCS SubSea; John Thorson, Sparton Navigation and Exploration; Craig Lippus, Geometrics April 1, 2012 A new digital compass provides
Page 1 of 5 Navigation Sensor Technology Aids Marine Seismic Survey Al Hise, NCS SubSea; John Thorson, Sparton Navigation and Exploration; Craig Lippus, Geometrics April 1, 2012 A new digital compass provides
USBL positioning and communication systems. Applications
 USBL positioning and communication systems Offering a powerful USBL transceiver functionality with full benefits of an S2C technology communication link Applications Positioning of offshore equipment >
USBL positioning and communication systems Offering a powerful USBL transceiver functionality with full benefits of an S2C technology communication link Applications Positioning of offshore equipment >
GPS Milestones, cont. GPS Milestones. The Global Positioning Sytem, Part 1 10/10/2017. M. Helper, GEO 327G/386G, UT Austin 1. US GPS Facts of Note
 The Global Positioning System US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites (SVs)
The Global Positioning System US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites (SVs)
Line and polygon features can be created via on-screen digitizing.
 This module explains how GPS works, sources of error, and error correction using real time or post processing differential correction. Cost and accuracy of different grades of GPS units are also part of
This module explains how GPS works, sources of error, and error correction using real time or post processing differential correction. Cost and accuracy of different grades of GPS units are also part of
LBL POSITIONING AND COMMUNICATION SYSTEMS PRODUCT INFORMATION GUIDE
 LBL POSITIONING AND COMMUNICATION SYSTEMS PRODUCT INFORMATION GUIDE EvoLogics S2C LBL Underwater Positioning and Communication Systems EvoLogics LBL systems bring the benefi ts of long baseline (LBL) acoustic
LBL POSITIONING AND COMMUNICATION SYSTEMS PRODUCT INFORMATION GUIDE EvoLogics S2C LBL Underwater Positioning and Communication Systems EvoLogics LBL systems bring the benefi ts of long baseline (LBL) acoustic
Module 2: Lecture 4 Flight Control System
 26 Guidance of Missiles/NPTEL/2012/D.Ghose Module 2: Lecture 4 Flight Control System eywords. Roll, Pitch, Yaw, Lateral Autopilot, Roll Autopilot, Gain Scheduling 3.2 Flight Control System The flight control
26 Guidance of Missiles/NPTEL/2012/D.Ghose Module 2: Lecture 4 Flight Control System eywords. Roll, Pitch, Yaw, Lateral Autopilot, Roll Autopilot, Gain Scheduling 3.2 Flight Control System The flight control
Tightly Integrated Second Generation Acoustic-Inertial Position Reference Systems
 Return to Session Menu DYNAMIC POSITIONING CONFERENCE October 15-16, 2013 SENSORS SESSION II Tightly Integrated Second Generation Acoustic-Inertial Position Reference Systems Mark Carter Sonardyne International
Return to Session Menu DYNAMIC POSITIONING CONFERENCE October 15-16, 2013 SENSORS SESSION II Tightly Integrated Second Generation Acoustic-Inertial Position Reference Systems Mark Carter Sonardyne International
GPS Accuracies in the Field
 GPS Accuracies in the Field A short and informative talk by A. Richard Vannozzi, PLS Assistant Professor of Civil Technology/Surveying and Mapping Thompson School of Applied Science University of New Hampshire
GPS Accuracies in the Field A short and informative talk by A. Richard Vannozzi, PLS Assistant Professor of Civil Technology/Surveying and Mapping Thompson School of Applied Science University of New Hampshire
Global Positioning Systems (GPS) Trails: the achilles heel of mapping from the air / satellites
 Trails: the achilles heel of mapping from the air / satellites") Global Positioning Systems (GPS) Trails: the achilles heel of mapping from the air / satellites Google maps updated regularly by local users using GPS Also: http://openstreetmaps.org GPS applications
Global Positioning Systems (GPS) Trails: the achilles heel of mapping from the air / satellites Google maps updated regularly by local users using GPS Also: http://openstreetmaps.org GPS applications
Three-dimensional investigation of buried structures with multi-transducer parametric sub-bottom profiler as part of hydrographical applications
 Three-dimensional investigation of buried structures with multi-transducer parametric sub-bottom profiler as part Jens LOWAG, Germany, Dr. Jens WUNDERLICH, Germany, Peter HUEMBS, Germany Key words: parametric,
Three-dimensional investigation of buried structures with multi-transducer parametric sub-bottom profiler as part Jens LOWAG, Germany, Dr. Jens WUNDERLICH, Germany, Peter HUEMBS, Germany Key words: parametric,
Inertial Sensors. Ellipse 2 Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
DEVICE CONFIGURATION INSTRUCTIONS
 WinFrog Device Group: Device Name/Model: Device Manufacturer: Device Data String(s) Output to WinFrog: WinFrog Data String(s) Output to Device: WinFrog Data Item(s) and their RAW record: GPS POS/MV (NMEA)
WinFrog Device Group: Device Name/Model: Device Manufacturer: Device Data String(s) Output to WinFrog: WinFrog Data String(s) Output to Device: WinFrog Data Item(s) and their RAW record: GPS POS/MV (NMEA)
Inertial Sensors. Ellipse 2 Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Dynamically Positioned and Thruster Assisted Position Moored Vessels
 Dynamically Positioned and Thruster Assisted Position Moored Vessels Professor Asgeir J. Sørensen, Department of Marine Technology, Norwegian University of Science and Technology, Otto Nielsens Vei 10,
Dynamically Positioned and Thruster Assisted Position Moored Vessels Professor Asgeir J. Sørensen, Department of Marine Technology, Norwegian University of Science and Technology, Otto Nielsens Vei 10,
Underwater Acoustic Communication and Positioning State of the Art and New Uses
 Underwater Acoustic Communication and Positioning State of the Art and New Uses Radio signals Work only on very short distances Salty water particularly problematic No underwater GPS Cables Too heavy,
Underwater Acoustic Communication and Positioning State of the Art and New Uses Radio signals Work only on very short distances Salty water particularly problematic No underwater GPS Cables Too heavy,
Sperry Marine Northrop Grumman
 Sperry Marine 2005 Northrop Grumman Table of Contents CHAPTER 1: CHAPTER 2: CHAPTER 3: CHAPTER 4: CHAPTER 5: CHAPTER 6: WHERE ARE YOU GOING? TRANSMITTING HEADING DEVICES DETERMINING HEADING BY SATELLITE
Sperry Marine 2005 Northrop Grumman Table of Contents CHAPTER 1: CHAPTER 2: CHAPTER 3: CHAPTER 4: CHAPTER 5: CHAPTER 6: WHERE ARE YOU GOING? TRANSMITTING HEADING DEVICES DETERMINING HEADING BY SATELLITE
RESOLUTION MSC.112(73) (adopted on 1 December 2000) ADOPTION OF THE REVISED PERFORMANCE STANDARDS FOR SHIPBORNE GLOBAL POSITIONING SYSTEM (GPS)
 (adopted on 1 December 2000) ADOPTION OF THE REVISED PERFORMANCE STANDARDS FOR SHIPBORNE GLOBAL POSITIONING SYSTEM (GPS)") MSC 73/21/Add.3 RESOLUTION MSC.112(73) FOR SHIPBORNE GLOBAL POSITIONING SYSTEM THE MARITIME SAFETY COMMITTEE, RECALLING Article (28(b) of the Convention on the International Maritime Organization concerning
MSC 73/21/Add.3 RESOLUTION MSC.112(73) FOR SHIPBORNE GLOBAL POSITIONING SYSTEM THE MARITIME SAFETY COMMITTEE, RECALLING Article (28(b) of the Convention on the International Maritime Organization concerning
Inertial Sensors. Ellipse Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Introduction to Geographic Information Science. Last Lecture. Today s Outline. Geography 4103 / GNSS/GPS Technology
 Geography 4103 / 5103 Introduction to Geographic Information Science GNSS/GPS Technology Last Lecture Geoids Ellipsoid Datum Projection Basics Today s Outline GNSS technology How satellite based navigation
Geography 4103 / 5103 Introduction to Geographic Information Science GNSS/GPS Technology Last Lecture Geoids Ellipsoid Datum Projection Basics Today s Outline GNSS technology How satellite based navigation
EIS - Electronics Instrumentation Systems for Marine Applications
 Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2015 230 - ETSETB - Barcelona School of Telecommunications Engineering 710 - EEL - Department of Electronic Engineering MASTER'S DEGREE
Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2015 230 - ETSETB - Barcelona School of Telecommunications Engineering 710 - EEL - Department of Electronic Engineering MASTER'S DEGREE
PRINCIPLE OF SEISMIC SURVEY
 PRINCIPLE OF SEISMIC SURVEY MARINE INSTITUTE Galway, Ireland 29th April 2016 Laurent MATTIO Contents 2 Principle of seismic survey Objective of seismic survey Acquisition chain Wave propagation Different
PRINCIPLE OF SEISMIC SURVEY MARINE INSTITUTE Galway, Ireland 29th April 2016 Laurent MATTIO Contents 2 Principle of seismic survey Objective of seismic survey Acquisition chain Wave propagation Different
The topic we are going to see in this unit, the global positioning system, is not directly related with the computer networks we use everyday, but it
 The topic we are going to see in this unit, the global positioning system, is not directly related with the computer networks we use everyday, but it is indeed a kind of computer network, as the specialised
The topic we are going to see in this unit, the global positioning system, is not directly related with the computer networks we use everyday, but it is indeed a kind of computer network, as the specialised
AN AUSTRALIAN PILOT PROJECT FOR A REAL TIME KINEMATIC GPS NETWORK USING THE VIRTUAL REFERENCE STATION CONCEPT
 AN AUSTRALIAN PILOT PROJECT FOR A REAL TIME KINEMATIC GPS NETWORK USING THE VIRTUAL REFERENCE STATION CONCEPT Matthew B HIGGINS, Australia Key words: GPS, Surveying, Real Time Kinematic, Virtual Reference
AN AUSTRALIAN PILOT PROJECT FOR A REAL TIME KINEMATIC GPS NETWORK USING THE VIRTUAL REFERENCE STATION CONCEPT Matthew B HIGGINS, Australia Key words: GPS, Surveying, Real Time Kinematic, Virtual Reference
MINE SEARCH MISSION PLANNING FOR HIGH DEFINITION SONAR SYSTEM - SELECTION OF SPACE IMAGING EQUIPMENT FOR A SMALL AUV DOROTA ŁUKASZEWICZ, LECH ROWIŃSKI
 MINE SEARCH MISSION PLANNING FOR HIGH DEFINITION SONAR SYSTEM - SELECTION OF SPACE IMAGING EQUIPMENT FOR A SMALL AUV DOROTA ŁUKASZEWICZ, LECH ROWIŃSKI Gdansk University of Technology Faculty of Ocean Engineering
MINE SEARCH MISSION PLANNING FOR HIGH DEFINITION SONAR SYSTEM - SELECTION OF SPACE IMAGING EQUIPMENT FOR A SMALL AUV DOROTA ŁUKASZEWICZ, LECH ROWIŃSKI Gdansk University of Technology Faculty of Ocean Engineering
NR402 GIS Applications in Natural Resources
 NR402 GIS Applications in Natural Resources Lesson 5 GPS/GIS integration Global Positioning System (GPS)..a global navigation system that everyone can use What is GPS? How does it work? How accurate is
NR402 GIS Applications in Natural Resources Lesson 5 GPS/GIS integration Global Positioning System (GPS)..a global navigation system that everyone can use What is GPS? How does it work? How accurate is
New developments in offshore precise GNSS positioning
 New developments in offshore precise GNSS positioning Kees de Jong Fugro Intersite B.V. November 2013 Contents Profile Mission is to be the world s leading service-provider in the collection and interpretation
New developments in offshore precise GNSS positioning Kees de Jong Fugro Intersite B.V. November 2013 Contents Profile Mission is to be the world s leading service-provider in the collection and interpretation
Receiver Technology CRESCENT OEM WHITE PAPER AMY DEWIS JENNIFER COLPITTS
 CRESCENT OEM WHITE PAPER AMY DEWIS JENNIFER COLPITTS With offices in Kansas City, Hiawatha, Calgary and Scottsdale, Hemisphere GPS is a global leader in designing and manufacturing innovative, costeffective,
CRESCENT OEM WHITE PAPER AMY DEWIS JENNIFER COLPITTS With offices in Kansas City, Hiawatha, Calgary and Scottsdale, Hemisphere GPS is a global leader in designing and manufacturing innovative, costeffective,
Autonomous Underwater Vehicle Navigation.
 Autonomous Underwater Vehicle Navigation. We are aware that electromagnetic energy cannot propagate appreciable distances in the ocean except at very low frequencies. As a result, GPS-based and other such
Autonomous Underwater Vehicle Navigation. We are aware that electromagnetic energy cannot propagate appreciable distances in the ocean except at very low frequencies. As a result, GPS-based and other such
POSITION & ORIENTATION SYSTEMS FOR MARINE VESSELS
 POSITION & ORIENTATION SYSTEMS FOR MARINE VESSELS Applanix POS MV is the marine-survey industry s most accurate, robust, and reliable position and orientation solution available today. Representing the
POSITION & ORIENTATION SYSTEMS FOR MARINE VESSELS Applanix POS MV is the marine-survey industry s most accurate, robust, and reliable position and orientation solution available today. Representing the
PRINCIPLES AND FUNCTIONING OF GPS/ DGPS /ETS ER A. K. ATABUDHI, ORSAC
 PRINCIPLES AND FUNCTIONING OF GPS/ DGPS /ETS ER A. K. ATABUDHI, ORSAC GPS GPS, which stands for Global Positioning System, is the only system today able to show you your exact position on the Earth anytime,
PRINCIPLES AND FUNCTIONING OF GPS/ DGPS /ETS ER A. K. ATABUDHI, ORSAC GPS GPS, which stands for Global Positioning System, is the only system today able to show you your exact position on the Earth anytime,
Survey Operations Pipeline Inspection
 Survey Operations Pipeline Inspection HydroFest 16 th April 20 Kevin Donald Agenda Why Inspect? Definition of a Pipeline Types of Survey Positioning Data Processing The Future Conclusions Page 2 Why Inspect?
Survey Operations Pipeline Inspection HydroFest 16 th April 20 Kevin Donald Agenda Why Inspect? Definition of a Pipeline Types of Survey Positioning Data Processing The Future Conclusions Page 2 Why Inspect?
Deep. Navigating the. High Accuracy Positioning Support for Deep Water Construction. Copyright Journal of Ocean Technology 2017
 Navigating the Deep High Accuracy Positioning Support for Deep Water Construction by Will Primavesi, Tamir Frydenrych, and Drew Nicholson ISTOCKPHOTO.COM/CHERT61 The Journal of Ocean Technology, Vol. 12,
Navigating the Deep High Accuracy Positioning Support for Deep Water Construction by Will Primavesi, Tamir Frydenrych, and Drew Nicholson ISTOCKPHOTO.COM/CHERT61 The Journal of Ocean Technology, Vol. 12,
Positioning Small AUVs for Deeper Water Surveys Using Inverted USBL
 Positioning Small AUVs for Deeper Water Surveys Using Inverted USBL Presented at Hydro12, Rotterdam, November 2012 Dr. T.M. Hiller, thiller@teledyne.com Overview Introduction to Gavia AUV Gavia Acoustic
Positioning Small AUVs for Deeper Water Surveys Using Inverted USBL Presented at Hydro12, Rotterdam, November 2012 Dr. T.M. Hiller, thiller@teledyne.com Overview Introduction to Gavia AUV Gavia Acoustic
High Precision Acoustic Positioning HiPAP
 High Precision Acoustic Positioning HiPAP www.kongsberg.com The HiPAP Family: HiPAP 501 HiPAP 451 HiPAP 351 HiPAP 351P series HiPAP 101 Maximizing performance by providing The Full Picture Our mission
High Precision Acoustic Positioning HiPAP www.kongsberg.com The HiPAP Family: HiPAP 501 HiPAP 451 HiPAP 351 HiPAP 351P series HiPAP 101 Maximizing performance by providing The Full Picture Our mission
Marine Construction Support & Dimensional Control
 Page 1 of 5 Marine Construction Support & Dimensional Control Key Specifications Surface and Subsurface Positioning IRM Support Lay Support Trench Suport Installation Support Metrology As-Built Heavy Lift
Page 1 of 5 Marine Construction Support & Dimensional Control Key Specifications Surface and Subsurface Positioning IRM Support Lay Support Trench Suport Installation Support Metrology As-Built Heavy Lift
POS MV Position and Attitude sensors. Applications. > > High reliability in all dynamic conditions. > > Immunity to GNSS outages
 45 27 39.384 N 9 07 30.145 E POS MV Position and Attitude sensors Applanix technology and support gives you the advantage: lower costs of deployment, faster times to completion, and improved quality of
45 27 39.384 N 9 07 30.145 E POS MV Position and Attitude sensors Applanix technology and support gives you the advantage: lower costs of deployment, faster times to completion, and improved quality of
One Source for Positioning Success
 novatel.com One Source for Positioning Success RTK, PPP, SBAS OR DGNSS. NOVATEL CORRECT OPTIMIZES ALL CORRECTION SOURCES, PUTTING MORE POWER, FLEXIBILITY AND CONTROL IN YOUR HANDS. NovAtel CORRECT is the
novatel.com One Source for Positioning Success RTK, PPP, SBAS OR DGNSS. NOVATEL CORRECT OPTIMIZES ALL CORRECTION SOURCES, PUTTING MORE POWER, FLEXIBILITY AND CONTROL IN YOUR HANDS. NovAtel CORRECT is the
SYSTEM 5900 SIDE SCAN SONAR
 SYSTEM 5900 SIDE SCAN SONAR HIGH-RESOLUTION, DYNAMICALLY FOCUSED, MULTI-BEAM SIDE SCAN SONAR Klein Marine System s 5900 sonar is the flagship in our exclusive family of multi-beam technology-based side
SYSTEM 5900 SIDE SCAN SONAR HIGH-RESOLUTION, DYNAMICALLY FOCUSED, MULTI-BEAM SIDE SCAN SONAR Klein Marine System s 5900 sonar is the flagship in our exclusive family of multi-beam technology-based side
KONGSBERG seafloor-mapping echosounders
 KONGSBERG seafloor-mapping echosounders Berit Horvei WORLD CLASS through people, technology and dedication AGENDA Historical overview EM series Multibeam echosounder and Subbottom profiler Topside software.
KONGSBERG seafloor-mapping echosounders Berit Horvei WORLD CLASS through people, technology and dedication AGENDA Historical overview EM series Multibeam echosounder and Subbottom profiler Topside software.
POS MV Position and Attitude sensors. Applications. > > High reliability in all dynamic conditions. > > Immunity to GNSS outages
 45 27 39.384 N 9 07 30.145 E POS MV Position and Attitude sensors Applanix technology and support gives you the advantage: lower costs of deployment, faster times to completion, and improved quality of
45 27 39.384 N 9 07 30.145 E POS MV Position and Attitude sensors Applanix technology and support gives you the advantage: lower costs of deployment, faster times to completion, and improved quality of
Combined USBL and Inertial Navigation
 SENSORS Combined USBL and Inertial Navigation Mikael Bliksted Larsen Sonardyne International October 13-14, 2009 Return to Session Directory Combined USBL and Inertial Navigation - an alternative and improved
SENSORS Combined USBL and Inertial Navigation Mikael Bliksted Larsen Sonardyne International October 13-14, 2009 Return to Session Directory Combined USBL and Inertial Navigation - an alternative and improved
ANNEX 12. RESOLUTION MSC.74(69) (adopted on 12 May 1998) ADOPTION OF NEW AND AMENDED PERFORMANCE STANDARDS
 (adopted on 12 May 1998) ADOPTION OF NEW AND AMENDED PERFORMANCE STANDARDS") RESOLUTION MSC.74(69) (adopted on 12 May 1998) ADOPTION OF NEW AND AMENDED PERFORMANCE STANDARDS THE MARITIME SAFETY COMMITTEE, RECALLING Article 28(b) of the Convention on the International Maritime Organization
RESOLUTION MSC.74(69) (adopted on 12 May 1998) ADOPTION OF NEW AND AMENDED PERFORMANCE STANDARDS THE MARITIME SAFETY COMMITTEE, RECALLING Article 28(b) of the Convention on the International Maritime Organization
GNSS & Coordinate Systems
 GNSS & Coordinate Systems Matthew McAdam, Marcelo Santos University of New Brunswick, Department of Geodesy and Geomatics Engineering, Fredericton, NB May 29, 2012 Santos, 2004 msantos@unb.ca 1 GNSS GNSS
GNSS & Coordinate Systems Matthew McAdam, Marcelo Santos University of New Brunswick, Department of Geodesy and Geomatics Engineering, Fredericton, NB May 29, 2012 Santos, 2004 msantos@unb.ca 1 GNSS GNSS
Inertial Systems. Ekinox 2 Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox 2 Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.02 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX 2 SERIES R&D specialists usually compromise between
Ekinox 2 Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.02 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX 2 SERIES R&D specialists usually compromise between
Inertial Systems. Ekinox 2 Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox 2 Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.02 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX 2 SERIES R&D specialists usually compromise between
Ekinox 2 Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.02 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX 2 SERIES R&D specialists usually compromise between
What is a GPS How does GPS work? GPS Segments GPS P osition Position Position Accuracy Accuracy Accuracy GPS A pplications Applications Applications
 What is GPS? What is a GPS How does GPS work? GPS Segments GPS Position Accuracy GPS Applications What is GPS? The Global Positioning System (GPS) is a precise worldwide radio-navigation system, and consists
What is GPS? What is a GPS How does GPS work? GPS Segments GPS Position Accuracy GPS Applications What is GPS? The Global Positioning System (GPS) is a precise worldwide radio-navigation system, and consists
Author s Name Name of the Paper Session. PDynamic. Positioning Committee. Marine Technology Society
 Author s Name Name of the Paper Session PDynamic Positioning Committee Marine Technology Society DYNAMIC POSITIONING CONFERENCE September 17-18, 2002 Acoustic Positioning Flexible Acoustic Positioning
Author s Name Name of the Paper Session PDynamic Positioning Committee Marine Technology Society DYNAMIC POSITIONING CONFERENCE September 17-18, 2002 Acoustic Positioning Flexible Acoustic Positioning
Inertial Sensors. Ellipse Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.2 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.2 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
GPS-Aided INS Datasheet Rev. 3.0
 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
ORBITAL NAVIGATION SYSTEMS PRESENT AND FUTURE TENDS
 ORBITAL NAVIGATION SYSTEMS PRESENT AND FUTURE TENDS CONTENT WHAT IS COVERED A BRIEF HISTORY OF SYSTEMS PRESENT SYSTEMS IN USE PROBLEMS WITH SATELLITE SYSTEMS PLANNED IMPROVEMENTS CONCLUSION CONTENT WHAT
ORBITAL NAVIGATION SYSTEMS PRESENT AND FUTURE TENDS CONTENT WHAT IS COVERED A BRIEF HISTORY OF SYSTEMS PRESENT SYSTEMS IN USE PROBLEMS WITH SATELLITE SYSTEMS PLANNED IMPROVEMENTS CONCLUSION CONTENT WHAT
GPS Errors. Figure 1. Four satellites are required to determine a GPS position.
 Expl ai ni nggps:thegl obalposi t i oni ngsyst em since a minimum of four satellites is required to calculate a position (Fig 1). However, many newer GPS receivers are equipped to receive up to 12 satellite
Expl ai ni nggps:thegl obalposi t i oni ngsyst em since a minimum of four satellites is required to calculate a position (Fig 1). However, many newer GPS receivers are equipped to receive up to 12 satellite
Primer on GPS Operations
 MP Rugged Wireless Modem Primer on GPS Operations 2130313 Rev 1.0 Cover illustration by Emma Jantz-Lee (age 11). An Introduction to GPS This primer is intended to provide the foundation for understanding
MP Rugged Wireless Modem Primer on GPS Operations 2130313 Rev 1.0 Cover illustration by Emma Jantz-Lee (age 11). An Introduction to GPS This primer is intended to provide the foundation for understanding
GNSS 101 Bringing It Down To Earth
 GNSS 101 Bringing It Down To Earth Steve Richter Frontier Precision, Inc. UTM County Coordinates NGVD 29 State Plane Datums Scale Factors Projections Session Agenda GNSS History & Basic Theory Coordinate
GNSS 101 Bringing It Down To Earth Steve Richter Frontier Precision, Inc. UTM County Coordinates NGVD 29 State Plane Datums Scale Factors Projections Session Agenda GNSS History & Basic Theory Coordinate
Now add true dual channel side scan and Sub Bottom profile to your hydrographic surveys.
 New ROSS 4900 Series Side Scan Sonar and Sub Bottom profiler. Now add true dual channel side scan and Sub Bottom profile to your hydrographic surveys. Laboratories, well known for its line of multi channel
New ROSS 4900 Series Side Scan Sonar and Sub Bottom profiler. Now add true dual channel side scan and Sub Bottom profile to your hydrographic surveys. Laboratories, well known for its line of multi channel
hydro8 Precise Point Positioning, the new DGPS: The C-Nav Experience Edwin Danson FRICS FInstCES FRAS Business strategy consultant
 hydro8 Precise Point Positioning, the new DGPS: The C-Nav Experience Edwin Danson FRICS FInstCES FRAS Business strategy consultant C-Nav Worldwide Precise Point Positioning with In-built Autonomy for Assurance
hydro8 Precise Point Positioning, the new DGPS: The C-Nav Experience Edwin Danson FRICS FInstCES FRAS Business strategy consultant C-Nav Worldwide Precise Point Positioning with In-built Autonomy for Assurance
BASELINE SURVEY, VISUAL - STANDARD
 BASELINE SURVEY, VISUAL - STANDARD Introduction As stated in SEPA s policy and in the Fish Farm Manual (1998), scientific data are required by SEPA in order to assess the existing condition on the site
BASELINE SURVEY, VISUAL - STANDARD Introduction As stated in SEPA s policy and in the Fish Farm Manual (1998), scientific data are required by SEPA in order to assess the existing condition on the site
Remote Sensing of Deepwater Shipwrecks
 Abigail Casavant December 16, 2014 Final Project NRS 509 Remote Sensing of Deepwater Shipwrecks Underwater archaeology is still a relatively new field in terms of age and technological advances. With the
Abigail Casavant December 16, 2014 Final Project NRS 509 Remote Sensing of Deepwater Shipwrecks Underwater archaeology is still a relatively new field in terms of age and technological advances. With the
Author s Name Name of the Paper Session. DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION. Sensing Autonomy.
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION Sensing Autonomy By Arne Rinnan Kongsberg Seatex AS Abstract A certain level of autonomy is already
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION Sensing Autonomy By Arne Rinnan Kongsberg Seatex AS Abstract A certain level of autonomy is already
Performance Evaluation of Differential Global Navigation Satellite System with RTK Corrections
 IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p- ISSN: 2278-8735.Volume 9, Issue 2, Ver. VI (Mar - Apr. 2014), PP 43-47 Performance Evaluation of Differential
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p- ISSN: 2278-8735.Volume 9, Issue 2, Ver. VI (Mar - Apr. 2014), PP 43-47 Performance Evaluation of Differential
Seapath 320. User Manual
 Seapath 320 User Manual Seapath 320 About this document Rev Date Written by Checked by Approved by Rev. 1 2010-02-22 FOS FOS First issue of this manual Rev. 2 2010-06-25 FOS FOS Description of serial port
Seapath 320 User Manual Seapath 320 About this document Rev Date Written by Checked by Approved by Rev. 1 2010-02-22 FOS FOS First issue of this manual Rev. 2 2010-06-25 FOS FOS Description of serial port
GEO 428: DEMs from GPS, Imagery, & Lidar Tuesday, September 11
 GEO 428: DEMs from GPS, Imagery, & Lidar Tuesday, September 11 Global Positioning Systems GPS is a technology that provides Location coordinates Elevation For any location with a decent view of the sky
GEO 428: DEMs from GPS, Imagery, & Lidar Tuesday, September 11 Global Positioning Systems GPS is a technology that provides Location coordinates Elevation For any location with a decent view of the sky
RECOMMENDATION ITU-R M *
 Rec. ITU-R M.823-3 1 RECOMMENDATION ITU-R M.823-3 * Technical characteristics of differential transmissions for global navigation satellite systems from maritime radio beacons in the frequency band 283.5-315
Rec. ITU-R M.823-3 1 RECOMMENDATION ITU-R M.823-3 * Technical characteristics of differential transmissions for global navigation satellite systems from maritime radio beacons in the frequency band 283.5-315
GPS-Aided INS Datasheet Rev. 2.6
 GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
Deep Sea Salvage Operations
 Deep Sea Salvage Operations Dr. Alok K. Verma & Ameya Erande Lean Institute - ODU 1 Deep Sea Salvage - Description of Module Shipwrecks are salvaged world wide for accident investigation, antique exploration
Deep Sea Salvage Operations Dr. Alok K. Verma & Ameya Erande Lean Institute - ODU 1 Deep Sea Salvage - Description of Module Shipwrecks are salvaged world wide for accident investigation, antique exploration