"This powerpoint presentation is property of David Abbink and Delft University of Technology. No part of this publication may be reproduced, stored
|
|
|
- Donna Jackson
- 5 years ago
- Views:
Transcription
1 "This powerpoint presentation is property of David Abbink and Delft University of Technology. No part of this publication may be reproduced, stored in other retrieval systems or transmitted in any form or by any means, electronic, mechanical, photocopying, recording or otherwise, without prior permission (mail for any requests).
2 Algemene Leden Vergadering PLUS Delft, 24 mei 2016
3 Programme Welcome David Abbink PhD, Associate Professor at the Department of BioMechanical Engineering, Delft University of Technology. Why should autonomous cars be like horses? Marly de Blaeij, Policy Advisor at Verbond Van Verzekeraars. Keep on rollin AGM Walking lunch


4 Simulation The future of intelligent vehicles Self-driving or co-operative driving?
5 Who am I? Dr. ir. David Abbink - Associate Professor of BioMechanical Engineering Delft University of Technology, The Netherlands Delft Haptics Lab: visiting prof.: 0.1 fte (Erwin Boer) postdoc: 1 postdoc (+1) PhDs: 6 PhDs (+1) MSc students: 8 / year TU Delft Funding Nissan ( ), Boeing ( ) Dutch Science Foundation NWO-STW VENI (2011), VIDI (2015), H-Haptics ( )





6 Humans and the tools we make

7 Ray Kurzweil & Moore s law






8 Machine Learning & Deep Learning

9 Artificial intelligence beats us already!

10 Simulation Learning AI - Deep learning
11 Embodiment: What is intelligence without movement?

12 Physical motion is difficult! Darpa Robotics Challenge, 2015



13 Or should we start to worry?

14 Simulation Robots will kill us all!
15 The human robot evolution
16 What are the risks and who s responsible?
17 Co-existence and co-operation

18 Enough stupid interaction with intelligence


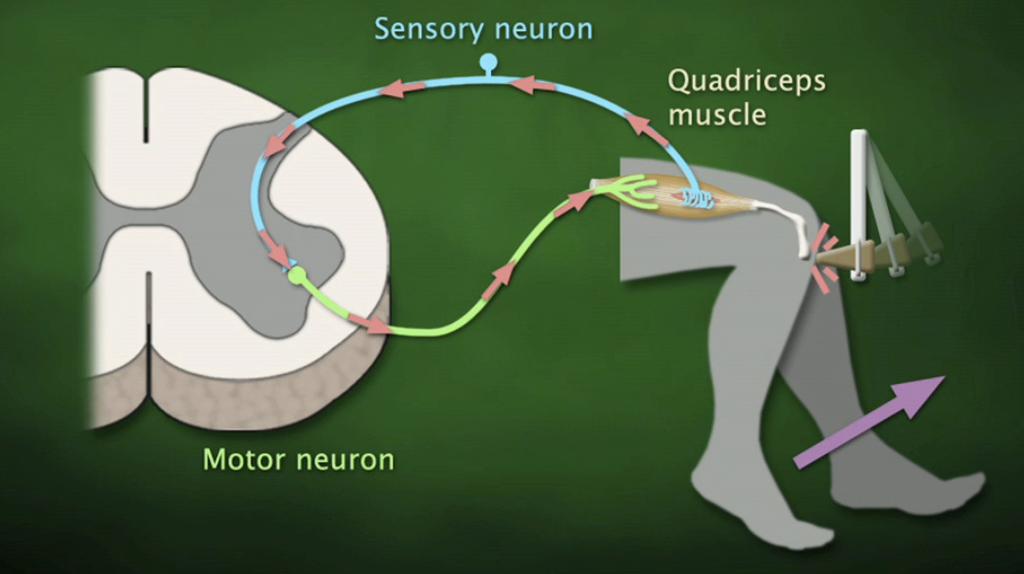
19 How do we control our body? Sixth sense


20 The future of driving?
21 Yeah right, what about self-driving cars?





22 Yeah right, what about self-driving cars?


23 What s wrong with highly automated driving? 2014: impressive technology.. outdated interaction! Automated car has limitations driver remains an essential component! Inhuman Task! Traded Control, human-as-backup


24 What s wrong with highly automated driving? OK my hands are near the wheel, my foot s near the brake, but I m not touching them this is hands-free driving but not the vision of mind-free driving Therefore: Slow (25 mph) Driver remains responsible Research focus on warning systems and driver monitoring Owwwsh*t! -This might not correspond to your driving style 1. How to make the automation understand your preferences/abilities? Oh that was a cone! 2. How to allow the driverto understand automation boundaries and limitations, and react on time?

25 What about trust?

26 What about conflicts?
27 My approach: creating a feel for the robot


28 My approach: creating a feel for the robot Haptic Gas Pedal Pedal Force Own car Pedal Depression
29 Haptic Shared Control for Steering Steering Wheel T Steering Torque Can generate feedback forces but: driver can relax, resist or give way X opt 0 Steering X sw Angle
30 Delft Approach to Design of Human-centered Haptic Shared Control Abbink & Mulder (2009) Exploring the dimensions of haptic feedback support in manual control Steering Wheel T Joint patent with Nissan (2008) Can generate feedback forces Can modify impedance dynamically shift authority in changing criticality X opt 0 X sw
31 Single path vs Multiple Paths One approach to support multiple paths? How to support lane changes? Tsoi et al. (2010) IEEE SMC Conference How to support multiple evasive paths? Della Penna et al. (2010) IEEE SMC Conference Ideally, human should make the choice Creative solutions may be needed Liability
32 Design Concept for multiple paths Reduce stiffness - criticality will be felt when trying to steer - easier to steer left or right T X opt 0 X opt X sw
33 Design Concept for multiple paths Stiffness T Can become negative in extreme cases - a choosing human is supported to avoid obstacle, and is then caught by the support - a stubborn human needs to increase own stiffness to avoid steering left or right X opt 0 X sw
34 Manual vs Shared Mulder, Abbink & Boer (2012) - Sharing Control with Haptics - Seamless Driver Support from Manual to Automatic Control Human Factors Tested 3 driver groups (from young and unexperienced, to old and experienced), during curve negotiation in a fixed-base driving simulator. Goal: compare manual control, to shared control, to hands-free driving Safety margins increase with less effort
35 Classic automation vs shared control Flemisch et al (2008) Method: Test automation errors of a curve negotiation support system that would fail just before the onset of a sharp curve Conditions with full automation (red lines) that allowed manual override with haptic shared control (green lines)
 Human Factors Prize")
36 Nominal Mode Different Designs of Haptic Shared Control vs Critical Failure Petermeijer, Abbink, de Winter (2014) Human Factors Prize 2014


37 My goal: develop Symbiotic Driving VENI: One-size-fits-all & One-size-fits-always: VIDI: Symbiotic interaction : system adapts like a human, and adapts to driver Visual feedback Force feedback Physical Interaction Control input Sensor feedback
38 Implications Haptic Shared Control is a unified approach Continuous sharing of control through forces No binary switches (on/off), but smooth shifting of authority Drivers are continuously engaged (and need to be so!) Driver is better aware of the functionality and intent of the system, as well as changing criticality of situation Drivers can always overrule the system Physically links driver to respond to driving environment, allowing fast reflexes and neuromuscular adaptation It enables mutual learning and adaptation between the driver and the intelligent vehicle Keeps the driver in the loop, comfortably responsible and aware
39 What are the risks and who s responsible?
40 The future is co-operation TU Delft

41 Vragen? Collaborators Mark Mulder Max Mulder Erwin Boer Joost de Winter MSc Students
WB2306 The Human Controller
 Simulation WB2306 The Human Controller Class 1. General Introduction Adapt the device to the human, not the human to the device! Teacher: David ABBINK Assistant professor at Delft Haptics Lab (www.delfthapticslab.nl)
Simulation WB2306 The Human Controller Class 1. General Introduction Adapt the device to the human, not the human to the device! Teacher: David ABBINK Assistant professor at Delft Haptics Lab (www.delfthapticslab.nl)
LANEKEEPING WITH SHARED CONTROL
 MDYNAMIX AFFILIATED INSTITUTE OF MUNICH UNIVERSITY OF APPLIED SCIENCES LANEKEEPING WITH SHARED CONTROL WHICH ISSUES HAVE TO BE RESEARCHED? 3rd International Symposium on Advanced Vehicle Technology 1 OUTLINE
MDYNAMIX AFFILIATED INSTITUTE OF MUNICH UNIVERSITY OF APPLIED SCIENCES LANEKEEPING WITH SHARED CONTROL WHICH ISSUES HAVE TO BE RESEARCHED? 3rd International Symposium on Advanced Vehicle Technology 1 OUTLINE
EVALUATION OF DIFFERENT MODALITIES FOR THE INTELLIGENT COOPERATIVE INTERSECTION SAFETY SYSTEM (IRIS) AND SPEED LIMIT SYSTEM
 AND SPEED LIMIT SYSTEM") Effects of ITS on drivers behaviour and interaction with the systems EVALUATION OF DIFFERENT MODALITIES FOR THE INTELLIGENT COOPERATIVE INTERSECTION SAFETY SYSTEM (IRIS) AND SPEED LIMIT SYSTEM Ellen S.
Effects of ITS on drivers behaviour and interaction with the systems EVALUATION OF DIFFERENT MODALITIES FOR THE INTELLIGENT COOPERATIVE INTERSECTION SAFETY SYSTEM (IRIS) AND SPEED LIMIT SYSTEM Ellen S.
Ecological Interface Design for the Flight Deck
 Ecological Interface Design for the Flight Deck The World beyond the Glass SAE Workshop, Tahoe, March 2006 René van Paassen, 1 Faculty Vermelding of Aerospace onderdeelengineering organisatie Control and
Ecological Interface Design for the Flight Deck The World beyond the Glass SAE Workshop, Tahoe, March 2006 René van Paassen, 1 Faculty Vermelding of Aerospace onderdeelengineering organisatie Control and
Identifying Human Control Behavior
 Identifying Human Control Behavior In the SIMONA Research Simulator Dr. ir. Herman Damveld 2-6-2010 Challenge the future Outline Aerospace Engineering Human Control Research at Aerospace Engineering Identifying
Identifying Human Control Behavior In the SIMONA Research Simulator Dr. ir. Herman Damveld 2-6-2010 Challenge the future Outline Aerospace Engineering Human Control Research at Aerospace Engineering Identifying
Ethics of AI: a role for BCS. Blay Whitby
 Ethics of AI: a role for BCS Blay Whitby blayw@sussex.ac.uk Main points AI technology will permeate, if not dominate everybody s life within the next few years. There are many ethical (and legal, and insurance)
Ethics of AI: a role for BCS Blay Whitby blayw@sussex.ac.uk Main points AI technology will permeate, if not dominate everybody s life within the next few years. There are many ethical (and legal, and insurance)
Creating a 3D environment map from 2D camera images in robotics
 Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
Trust in Automated Vehicles
 Trust in Automated Vehicles Fredrick Ekman and Mikael Johansson ekmanfr@chalmers.se, johamik@chalmers.se Design & Human Factors, Chalmers Adoption and use of technical systems users needs and requirements
Trust in Automated Vehicles Fredrick Ekman and Mikael Johansson ekmanfr@chalmers.se, johamik@chalmers.se Design & Human Factors, Chalmers Adoption and use of technical systems users needs and requirements
A study of an implementation of the kinesthetic feedback on the game framework applying the haptic1
 Vol.87 (Art, Culture, Game, Graphics, Broadcasting and Digital Contents 2015), pp.133-137 http://dx.doi.org/10.14257/astl.2015.87.27 A study of an implementation of the kinesthetic feedback on the game
Vol.87 (Art, Culture, Game, Graphics, Broadcasting and Digital Contents 2015), pp.133-137 http://dx.doi.org/10.14257/astl.2015.87.27 A study of an implementation of the kinesthetic feedback on the game
Intelligent driving TH« TNO I Innovation for live
 Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Introducing LISA. LISA: Laboratory for Intelligent and Safe Automobiles
 Introducing LISA LISA: Laboratory for Intelligent and Safe Automobiles Mohan M. Trivedi University of California at San Diego mtrivedi@ucsd.edu Int. Workshop on Progress and Future Directions of Adaptive
Introducing LISA LISA: Laboratory for Intelligent and Safe Automobiles Mohan M. Trivedi University of California at San Diego mtrivedi@ucsd.edu Int. Workshop on Progress and Future Directions of Adaptive
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
CITS3001. Algorithms, Agents and Artificial Intelligence. Semester 1, 2015
 CITS3001 Algorithms, Agents and Artificial Intelligence Semester 1, 2015 Wei Liu School of Computer Science & Software Eng. The University of Western Australia 5. Agents and introduction to AI AIMA, Chs.
CITS3001 Algorithms, Agents and Artificial Intelligence Semester 1, 2015 Wei Liu School of Computer Science & Software Eng. The University of Western Australia 5. Agents and introduction to AI AIMA, Chs.
Available theses (October 2012) MERLIN Group
 MERLIN Group") Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Last Time: Acting Humanly: The Full Turing Test
 Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
Neuromuscular Analysis of Haptic Gas Pedal Feedback during Car Following. David A. Abbink
 Neuromuscular Analysis of Haptic Gas Pedal Feedback during Car Following David A. Abbink Neuromuscular Analysis of Haptic Gas Pedal Feedback during Car Following Proefschrift ter verkrijging van de graad
Neuromuscular Analysis of Haptic Gas Pedal Feedback during Car Following David A. Abbink Neuromuscular Analysis of Haptic Gas Pedal Feedback during Car Following Proefschrift ter verkrijging van de graad
Automation and Mechatronics Engineering Program. Your Path Towards Success
 Automation and Mechatronics Engineering Program Your Path Towards Success What is Mechatronics? Mechatronics combines the principles of mechanical, computer, electronic, and control engineering into a
Automation and Mechatronics Engineering Program Your Path Towards Success What is Mechatronics? Mechatronics combines the principles of mechanical, computer, electronic, and control engineering into a
Microscopic traffic simulation with reactive driving agents
 2001 IEEE Intelligent Transportation Systems Conference Proceedings - Oakland (CA) USA = August 25-29, 2001 Microscopic traffic simulation with reactive driving agents Patrick A.M.Ehlert and Leon J.M.Rothkrantz,
2001 IEEE Intelligent Transportation Systems Conference Proceedings - Oakland (CA) USA = August 25-29, 2001 Microscopic traffic simulation with reactive driving agents Patrick A.M.Ehlert and Leon J.M.Rothkrantz,
Agents and Introduction to AI
 Agents and Introduction to AI CITS3001 Algorithms, Agents and Artificial Intelligence Tim French School of Computer Science and Software Engineering The University of Western Australia 2017, Semester 2
Agents and Introduction to AI CITS3001 Algorithms, Agents and Artificial Intelligence Tim French School of Computer Science and Software Engineering The University of Western Australia 2017, Semester 2
The IEEE Global Initiative for Ethical Considerations in Artificial Intelligence and Autonomous Systems. Overview April, 2017
 The IEEE Global Initiative for Ethical Considerations in Artificial Intelligence and Autonomous Systems Overview April, 2017 @johnchavens 3 IEEE Standards Association IEEE s Technology Ethics Landscape
The IEEE Global Initiative for Ethical Considerations in Artificial Intelligence and Autonomous Systems Overview April, 2017 @johnchavens 3 IEEE Standards Association IEEE s Technology Ethics Landscape
Perceptual Overlays for Teaching Advanced Driving Skills
 Perceptual Overlays for Teaching Advanced Driving Skills Brent Gillespie Micah Steele ARC Conference May 24, 2000 5/21/00 1 Outline 1. Haptics in the Driver-Vehicle Interface 2. Perceptual Overlays for
Perceptual Overlays for Teaching Advanced Driving Skills Brent Gillespie Micah Steele ARC Conference May 24, 2000 5/21/00 1 Outline 1. Haptics in the Driver-Vehicle Interface 2. Perceptual Overlays for
Robotesting: Are you ready for that yet?
 Robotesting: Are you ready for that yet? Testing of robots Testing with robots Rik Marselis October 2017 Who has a robot? In 10 years all of you will!! Sogeti 2017 2 Sogeti 2017 Page 1 1980 Workgroup -member
Robotesting: Are you ready for that yet? Testing of robots Testing with robots Rik Marselis October 2017 Who has a robot? In 10 years all of you will!! Sogeti 2017 2 Sogeti 2017 Page 1 1980 Workgroup -member
Evolution 4.0 Ir. Dr. C.J.M. (Chris) Verhoeven
 Verhoeven") Evolution 4.0 Ir. Dr. C.J.M. (Chris) Verhoeven Associate Professor TU Delft Robotics Institute / Theme leader Swarm Robots TU Delft Space Institute / Theme leader Space Robots TU Delft Faculty of Aerospace
Evolution 4.0 Ir. Dr. C.J.M. (Chris) Verhoeven Associate Professor TU Delft Robotics Institute / Theme leader Swarm Robots TU Delft Space Institute / Theme leader Space Robots TU Delft Faculty of Aerospace
Roles of Artificial Intelligence and Machine Learning in Future Mobility
 Roles of Artificial Intelligence and Machine Learning in Future Mobility Huang Guangbin Professor of School of Electrical and Electronic Engineering Nanyang Technological University, Singapore ITU/IMDA
Roles of Artificial Intelligence and Machine Learning in Future Mobility Huang Guangbin Professor of School of Electrical and Electronic Engineering Nanyang Technological University, Singapore ITU/IMDA
Line Detection. Duration Minutes. Di culty Intermediate. Learning Objectives Students will:
 Line Detection Design ways to improve driving safety by helping to prevent drivers from falling asleep and causing an accident. Learning Objectives Students will: Explore the concept of the Loop Understand
Line Detection Design ways to improve driving safety by helping to prevent drivers from falling asleep and causing an accident. Learning Objectives Students will: Explore the concept of the Loop Understand
Front Digital page Strategy and Leadership
 Front Digital page Strategy and Leadership Who am I? Prof. Dr. Bob de Wit What concerns me? - How to best lead a firm - How to design the strategy process - How to best govern a country - How to adapt
Front Digital page Strategy and Leadership Who am I? Prof. Dr. Bob de Wit What concerns me? - How to best lead a firm - How to design the strategy process - How to best govern a country - How to adapt
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators. Roberto De Vecchi VI-grade Enrico Busto - AddFor
 ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
Kinect Interface for UC-win/Road: Application to Tele-operation of Small Robots
 Kinect Interface for UC-win/Road: Application to Tele-operation of Small Robots Hafid NINISS Forum8 - Robot Development Team Abstract: The purpose of this work is to develop a man-machine interface for
Kinect Interface for UC-win/Road: Application to Tele-operation of Small Robots Hafid NINISS Forum8 - Robot Development Team Abstract: The purpose of this work is to develop a man-machine interface for
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Introduction to Computer Science
 Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017 Schedule 1 Robotics ì Acting on the physical world 2 What is robotics? uthe study of the intelligent
Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017 Schedule 1 Robotics ì Acting on the physical world 2 What is robotics? uthe study of the intelligent
VSI Labs The Build Up of Automated Driving
 VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
Responsible AI & National AI Strategies
 Responsible AI & National AI Strategies European Union Commission Dr. Anand S. Rao Global Artificial Intelligence Lead Today s discussion 01 02 Opportunities in Artificial Intelligence Risks of Artificial
Responsible AI & National AI Strategies European Union Commission Dr. Anand S. Rao Global Artificial Intelligence Lead Today s discussion 01 02 Opportunities in Artificial Intelligence Risks of Artificial
! The architecture of the robot control system! Also maybe some aspects of its body/motors/sensors
 Towards the more concrete end of the Alife spectrum is robotics. Alife -- because it is the attempt to synthesise -- at some level -- 'lifelike behaviour. AI is often associated with a particular style
Towards the more concrete end of the Alife spectrum is robotics. Alife -- because it is the attempt to synthesise -- at some level -- 'lifelike behaviour. AI is often associated with a particular style
Plan for the 2nd hour. What is AI. Acting humanly: The Turing test. EDAF70: Applied Artificial Intelligence Agents (Chapter 2 of AIMA)
") Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
Designing an HMI for ASAS in respect of situation awareness
 RESEARCH GRANT SCHEME DELFT Contract reference number 08-120917-C EEC contact person: Garfield Dean Designing an HMI for ASAS in respect of situation awareness Ecological ASAS Interfaces 2010 Midterm Progress
RESEARCH GRANT SCHEME DELFT Contract reference number 08-120917-C EEC contact person: Garfield Dean Designing an HMI for ASAS in respect of situation awareness Ecological ASAS Interfaces 2010 Midterm Progress
Key-Words: - Neural Networks, Cerebellum, Cerebellar Model Articulation Controller (CMAC), Auto-pilot
, Auto-pilot") erebellum Based ar Auto-Pilot System B. HSIEH,.QUEK and A.WAHAB Intelligent Systems Laboratory, School of omputer Engineering Nanyang Technological University, Blk N4 #2A-32 Nanyang Avenue, Singapore 639798
erebellum Based ar Auto-Pilot System B. HSIEH,.QUEK and A.WAHAB Intelligent Systems Laboratory, School of omputer Engineering Nanyang Technological University, Blk N4 #2A-32 Nanyang Avenue, Singapore 639798
Front Digital page Strategy and leadership
 Front Digital page Strategy and leadership Who am I? Prof. Dr. Bob de Wit What concerns me? - How to best lead a firm - How to design the strategy process - How to best govern a country - How to adapt
Front Digital page Strategy and leadership Who am I? Prof. Dr. Bob de Wit What concerns me? - How to best lead a firm - How to design the strategy process - How to best govern a country - How to adapt
Sensor-based robot control for Physical-Human Robot Interaction. IDH Interactive Digital Humans
 Sensor-based robot control for Physical-Human Robot Interaction IDH Interactive Digital Humans Robotics Department DEXTER - Design, control, handling - Parallel and medical robotics DEMAR - Modeling and
Sensor-based robot control for Physical-Human Robot Interaction IDH Interactive Digital Humans Robotics Department DEXTER - Design, control, handling - Parallel and medical robotics DEMAR - Modeling and
Birth of An Intelligent Humanoid Robot in Singapore
 Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
Driver Education Classroom and In-Car Curriculum Unit 3 Space Management System
 Driver Education Classroom and In-Car Curriculum Unit 3 Space Management System Driver Education Classroom and In-Car Instruction Unit 3-2 Unit Introduction Unit 3 will introduce operator procedural and
Driver Education Classroom and In-Car Curriculum Unit 3 Space Management System Driver Education Classroom and In-Car Instruction Unit 3-2 Unit Introduction Unit 3 will introduce operator procedural and
Switch. Global Creative Partner
 Switch Global Creative Partner 02 We will try our best to become a Global Leading Company DAESUNG DAESUNG Switch System Daesung Electric has been developing and producing switches, relays, and automotive
Switch Global Creative Partner 02 We will try our best to become a Global Leading Company DAESUNG DAESUNG Switch System Daesung Electric has been developing and producing switches, relays, and automotive
The IEEE Global Initiative for Ethical Considerations in Artificial Intelligence and Autonomous Systems. Overview June, 2017
 The IEEE Global Initiative for Ethical Considerations in Artificial Intelligence and Autonomous Systems Overview June, 2017 @johnchavens Ethically Aligned Design A Vision for Prioritizing Human Wellbeing
The IEEE Global Initiative for Ethical Considerations in Artificial Intelligence and Autonomous Systems Overview June, 2017 @johnchavens Ethically Aligned Design A Vision for Prioritizing Human Wellbeing
A.I in Automotive? Why and When.
 A.I in Automotive? Why and When. AGENDA 01 02 03 04 Definitions A.I? A.I in automotive Now? Next big A.I breakthrough in Automotive 01 DEFINITIONS DEFINITIONS Artificial Intelligence Artificial Intelligence:
A.I in Automotive? Why and When. AGENDA 01 02 03 04 Definitions A.I? A.I in automotive Now? Next big A.I breakthrough in Automotive 01 DEFINITIONS DEFINITIONS Artificial Intelligence Artificial Intelligence:
Prospective Teleautonomy For EOD Operations
 Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
MACHINE EXECUTION OF HUMAN INTENTIONS. Mark Waser Digital Wisdom Institute
 MACHINE EXECUTION OF HUMAN INTENTIONS Mark Waser Digital Wisdom Institute MWaser@DigitalWisdomInstitute.org TEAMWORK To be truly useful, robotic systems must be designed with their human users in mind;
MACHINE EXECUTION OF HUMAN INTENTIONS Mark Waser Digital Wisdom Institute MWaser@DigitalWisdomInstitute.org TEAMWORK To be truly useful, robotic systems must be designed with their human users in mind;
Human Factors Studies for Limited- Ability Autonomous Driving Systems (LAADS)
") Human Factors Studies for Limited- Ability Autonomous Driving Systems (LAADS) Glenn Widmann; Delphi Automotive Systems Jeremy Salinger; General Motors Robert Dufour; Delphi Automotive Systems Charles Green;
Human Factors Studies for Limited- Ability Autonomous Driving Systems (LAADS) Glenn Widmann; Delphi Automotive Systems Jeremy Salinger; General Motors Robert Dufour; Delphi Automotive Systems Charles Green;
A NEW NEUROMORPHIC STRATEGY FOR THE FUTURE OF VISION FOR MACHINES June Xavier Lagorce Head of Computer Vision & Systems
 A NEW NEUROMORPHIC STRATEGY FOR THE FUTURE OF VISION FOR MACHINES June 2017 Xavier Lagorce Head of Computer Vision & Systems Imagine meeting the promise of Restoring sight to the blind Accident-free autonomous
A NEW NEUROMORPHIC STRATEGY FOR THE FUTURE OF VISION FOR MACHINES June 2017 Xavier Lagorce Head of Computer Vision & Systems Imagine meeting the promise of Restoring sight to the blind Accident-free autonomous
Minimizing Distraction While Adding Features
 Minimizing Distraction While Adding Features Lisa Southwick, UX Manager Hyundai American Technical Center, Inc. Agenda Distracted Driving Advanced Driver Assistance Systems (ADAS) ADAS User Experience
Minimizing Distraction While Adding Features Lisa Southwick, UX Manager Hyundai American Technical Center, Inc. Agenda Distracted Driving Advanced Driver Assistance Systems (ADAS) ADAS User Experience
EUROPEAN COMMISSION DG RESEARCH
 EUROPEAN COMMISSION DG RESEARCH SIXTH FRAMEWORK PROGRAMME THEMATIC PRIORITY 1.6 SUSTAINABLE DEVELOPMENT, GLOBAL CHANGE & ECOSYSTEMS INTEGRATED PROJECT CONTRACT N. 031315 Human Factors aspects in automated
EUROPEAN COMMISSION DG RESEARCH SIXTH FRAMEWORK PROGRAMME THEMATIC PRIORITY 1.6 SUSTAINABLE DEVELOPMENT, GLOBAL CHANGE & ECOSYSTEMS INTEGRATED PROJECT CONTRACT N. 031315 Human Factors aspects in automated
The Emerging Economy 2030:
 The Emerging Economy 2030: Some initial explorations Public Service Foresight Network 22 July 2016 2 THE HORIZONS FORESIGHT METHOD Identify the issue or problem of interest Consider the larger system(s)
The Emerging Economy 2030: Some initial explorations Public Service Foresight Network 22 July 2016 2 THE HORIZONS FORESIGHT METHOD Identify the issue or problem of interest Consider the larger system(s)
PROGRAMME AARHUS UNIVERSITY
 PROGRAMME 9:00 Welcome to the first DIGIT event, Peter Gorm Larsen, AU/ENG 9:30 Machine Learning for Media Data Analysis, Alexandros Iosfidis, AU/ENG 10:00 Application of neural networks analysis in medicine,
PROGRAMME 9:00 Welcome to the first DIGIT event, Peter Gorm Larsen, AU/ENG 9:30 Machine Learning for Media Data Analysis, Alexandros Iosfidis, AU/ENG 10:00 Application of neural networks analysis in medicine,
Glossary of terms. Short explanation
 Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Haptic Applications (Part 1) - Teleoperation & Haptics - Exoskeletons & Biosignals
 - Teleoperation & Haptics - Exoskeletons & Biosignals") Simulation Haptic Applications (Part 1) - Teleoperation & Haptics - Exoskeletons & Biosignals Feeling is believing Teachers Tricia Gibo & Jack Schorsch BioMechanical Engineering, Delft University of Technology
Simulation Haptic Applications (Part 1) - Teleoperation & Haptics - Exoskeletons & Biosignals Feeling is believing Teachers Tricia Gibo & Jack Schorsch BioMechanical Engineering, Delft University of Technology
Automation and Control Electrical Engineering
 Automation and Control Electrical Engineering Technical University of Denmark DTU-Building 326 DK-2800 Kgs. Lyngby Denmark aut.elektro.dtu.dk Ole Ravn Total students ~9.300 including Ph.D. 1.150 and Int.
Automation and Control Electrical Engineering Technical University of Denmark DTU-Building 326 DK-2800 Kgs. Lyngby Denmark aut.elektro.dtu.dk Ole Ravn Total students ~9.300 including Ph.D. 1.150 and Int.
Available theses (October 2011) MERLIN Group
 MERLIN Group") Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Hybrid architectures. IAR Lecture 6 Barbara Webb
 Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Designing an HMI for ASAS in respect of situation awareness
 RESEARCH GRANT SCHEME DELFT Contract reference number 08-120917-C EEC contact person: Garfield Dean Designing an HMI for ASAS in respect of situation awareness Ecological ASAS Interfaces 2011 Close-Out
RESEARCH GRANT SCHEME DELFT Contract reference number 08-120917-C EEC contact person: Garfield Dean Designing an HMI for ASAS in respect of situation awareness Ecological ASAS Interfaces 2011 Close-Out
ServoStep technology
 What means "ServoStep" "ServoStep" in Ever Elettronica's strategy resumes seven keypoints for quality and performances in motion control applications: Stepping motors Fast Forward Feed Full Digital Drive
What means "ServoStep" "ServoStep" in Ever Elettronica's strategy resumes seven keypoints for quality and performances in motion control applications: Stepping motors Fast Forward Feed Full Digital Drive
Distributed Robotics: Building an environment for digital cooperation. Artificial Intelligence series
 Distributed Robotics: Building an environment for digital cooperation Artificial Intelligence series Distributed Robotics March 2018 02 From programmable machines to intelligent agents Robots, from the
Distributed Robotics: Building an environment for digital cooperation Artificial Intelligence series Distributed Robotics March 2018 02 From programmable machines to intelligent agents Robots, from the
Robotics Evolution: From Production Rate to Human Productivity
 Chetan Kapoor Senior Director of Technology Innovation Yaskawa America, Motoman Robotics Division Robotics Evolution: From Production Rate to Human Productivity 2016 YASKAWA America, Inc. YASKAWA.COM 100
Chetan Kapoor Senior Director of Technology Innovation Yaskawa America, Motoman Robotics Division Robotics Evolution: From Production Rate to Human Productivity 2016 YASKAWA America, Inc. YASKAWA.COM 100
HUMAN FACTORS IN VEHICLE AUTOMATION
 Emma Johansson HUMAN FACTORS IN VEHICLE AUTOMATION - Activities in the European project AdaptIVe Vehicle and Road Automation (VRA) Webinar 10 October 2014 // Outline AdaptIVe short overview Collaborative
Emma Johansson HUMAN FACTORS IN VEHICLE AUTOMATION - Activities in the European project AdaptIVe Vehicle and Road Automation (VRA) Webinar 10 October 2014 // Outline AdaptIVe short overview Collaborative
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
Autonomous Vehicle Simulation (MDAS.ai)
") Autonomous Vehicle Simulation (MDAS.ai) Sridhar Lakshmanan Department of Electrical & Computer Engineering University of Michigan - Dearborn Presentation for Physical Systems Replication Panel NDIA Cyber-Enabled
Autonomous Vehicle Simulation (MDAS.ai) Sridhar Lakshmanan Department of Electrical & Computer Engineering University of Michigan - Dearborn Presentation for Physical Systems Replication Panel NDIA Cyber-Enabled
CPE/CSC 580: Intelligent Agents
 CPE/CSC 580: Intelligent Agents Franz J. Kurfess Computer Science Department California Polytechnic State University San Luis Obispo, CA, U.S.A. 1 Course Overview Introduction Intelligent Agent, Multi-Agent
CPE/CSC 580: Intelligent Agents Franz J. Kurfess Computer Science Department California Polytechnic State University San Luis Obispo, CA, U.S.A. 1 Course Overview Introduction Intelligent Agent, Multi-Agent
HeroX - Untethered VR Training in Sync'ed Physical Spaces
 Page 1 of 6 HeroX - Untethered VR Training in Sync'ed Physical Spaces Above and Beyond - Integrating Robotics In previous research work I experimented with multiple robots remotely controlled by people
Page 1 of 6 HeroX - Untethered VR Training in Sync'ed Physical Spaces Above and Beyond - Integrating Robotics In previous research work I experimented with multiple robots remotely controlled by people
Designing & Deploying Multimodal UIs in Autonomous Vehicles
 Designing & Deploying Multimodal UIs in Autonomous Vehicles Bruce N. Walker, Ph.D. Professor of Psychology and of Interactive Computing Georgia Institute of Technology Transition to Automation Acceptance
Designing & Deploying Multimodal UIs in Autonomous Vehicles Bruce N. Walker, Ph.D. Professor of Psychology and of Interactive Computing Georgia Institute of Technology Transition to Automation Acceptance
A REACTIVE DRIVING AGENT FOR MICROSCOPIC TRAFFIC SIMULATION
 A REACTIVE DRIVING AGENT FOR MICROSCOPIC TRAFFIC SIMULATION Patrick A.M. Ehlert and Leon J.M. Rothkrantz Knowledge Based Systems Group Department of Information Technology and Systems Delft University
A REACTIVE DRIVING AGENT FOR MICROSCOPIC TRAFFIC SIMULATION Patrick A.M. Ehlert and Leon J.M. Rothkrantz Knowledge Based Systems Group Department of Information Technology and Systems Delft University
Victor O. Matthews (Ph.D)
") Victor O. Matthews (Ph.D) Department of Electrical/ Information Engineering CU EXECUTIVE ADVANCE 2016 ATTAINMENT OF VISION 10:2022 WHAT IS INNOVATION? CU EXECUTIVE ADVANCE 2016 ATTAINMENT OF VISION 10:2022
Victor O. Matthews (Ph.D) Department of Electrical/ Information Engineering CU EXECUTIVE ADVANCE 2016 ATTAINMENT OF VISION 10:2022 WHAT IS INNOVATION? CU EXECUTIVE ADVANCE 2016 ATTAINMENT OF VISION 10:2022
SINGLE SENSOR LINE FOLLOWER
 SINGLE SENSOR LINE FOLLOWER One Sensor Line Following Sensor on edge of line If sensor is reading White: Robot is too far right and needs to turn left Black: Robot is too far left and needs to turn right
SINGLE SENSOR LINE FOLLOWER One Sensor Line Following Sensor on edge of line If sensor is reading White: Robot is too far right and needs to turn left Black: Robot is too far left and needs to turn right
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Autonomous Obstacle Avoiding and Path Following Rover
 Volume 114 No. 9 2017, 271-281 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu Autonomous Obstacle Avoiding and Path Following Rover ijpam.eu Sandeep Polina
Volume 114 No. 9 2017, 271-281 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu Autonomous Obstacle Avoiding and Path Following Rover ijpam.eu Sandeep Polina
HAPTICS AND AUTOMOTIVE HMI
 HAPTICS AND AUTOMOTIVE HMI Technology and trends report January 2018 EXECUTIVE SUMMARY The automotive industry is on the cusp of a perfect storm of trends driving radical design change. Mary Barra (CEO
HAPTICS AND AUTOMOTIVE HMI Technology and trends report January 2018 EXECUTIVE SUMMARY The automotive industry is on the cusp of a perfect storm of trends driving radical design change. Mary Barra (CEO
Collective Robotics. Marcin Pilat
 Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Ethics in Artificial Intelligence
 Ethics in Artificial Intelligence By Jugal Kalita, PhD Professor of Computer Science Daniels Fund Ethics Initiative Ethics Fellow Sponsored by: This material was developed by Jugal Kalita, MPA, and is
Ethics in Artificial Intelligence By Jugal Kalita, PhD Professor of Computer Science Daniels Fund Ethics Initiative Ethics Fellow Sponsored by: This material was developed by Jugal Kalita, MPA, and is
Living city in Mafia Ma II Jan Kratochvíl 2K Czech Cz
 Living city in Mafia II Jan Kratochvíl 2K Czech Content What are our goals? Filling the city with elements Create some action Car driver Bringing order to the city (Police) What went wrong Goals Full of
Living city in Mafia II Jan Kratochvíl 2K Czech Content What are our goals? Filling the city with elements Create some action Car driver Bringing order to the city (Police) What went wrong Goals Full of
Industry 4.0 The Future of Innovation
 Industry 4.0 The Future of Innovation Peter Merrill Chair; ASQ Innovation Think Tank www.petermerrill.com Why Innovation? Global Change Digitization Market Change Social Change Perfect Storm of Change
Industry 4.0 The Future of Innovation Peter Merrill Chair; ASQ Innovation Think Tank www.petermerrill.com Why Innovation? Global Change Digitization Market Change Social Change Perfect Storm of Change
LAB 5: Mobile robots -- Modeling, control and tracking
 LAB 5: Mobile robots -- Modeling, control and tracking Overview In this laboratory experiment, a wheeled mobile robot will be used to illustrate Modeling Independent speed control and steering Longitudinal
LAB 5: Mobile robots -- Modeling, control and tracking Overview In this laboratory experiment, a wheeled mobile robot will be used to illustrate Modeling Independent speed control and steering Longitudinal
Karen B. Paul, Ph.D. From Blurring Boundaries to Boundaryless
 Karen B. Paul, Ph.D. From Blurring Boundaries to Boundaryless Agenda Little on the Culture for Context Blurring Boundaries Toward Boundary-less Change and Over-coming Barriers TO ACCESS THESE SLIDES PLEASE
Karen B. Paul, Ph.D. From Blurring Boundaries to Boundaryless Agenda Little on the Culture for Context Blurring Boundaries Toward Boundary-less Change and Over-coming Barriers TO ACCESS THESE SLIDES PLEASE
Prof. Roberto V. Zicari Frankfurt Big Data Lab The Human Side of AI SIU Frankfurt, November 20, 2017
 Prof. Roberto V. Zicari Frankfurt Big Data Lab www.bigdata.uni-frankfurt.de The Human Side of AI SIU Frankfurt, November 20, 2017 1 Data as an Economic Asset I think we re just beginning to grapple with
Prof. Roberto V. Zicari Frankfurt Big Data Lab www.bigdata.uni-frankfurt.de The Human Side of AI SIU Frankfurt, November 20, 2017 1 Data as an Economic Asset I think we re just beginning to grapple with
Baxter Safety and Compliance Overview
 Baxter Safety and Compliance Overview How this unique collaborative robot safely manages operational risks Unlike typical industrial robots that operate behind safeguarding, Baxter, the collaborative robot
Baxter Safety and Compliance Overview How this unique collaborative robot safely manages operational risks Unlike typical industrial robots that operate behind safeguarding, Baxter, the collaborative robot
Ensuring the Safety of an Autonomous Robot in Interaction with Children
 Machine Learning in Robot Assisted Therapy Ensuring the Safety of an Autonomous Robot in Interaction with Children Challenges and Considerations Stefan Walke stefan.walke@tum.de SS 2018 Overview Physical
Machine Learning in Robot Assisted Therapy Ensuring the Safety of an Autonomous Robot in Interaction with Children Challenges and Considerations Stefan Walke stefan.walke@tum.de SS 2018 Overview Physical
Towards Intuitive Industrial Human-Robot Collaboration
 Towards Intuitive Industrial Human-Robot Collaboration System Design and Future Directions Ferdinand Fuhrmann, Wolfgang Weiß, Lucas Paletta, Bernhard Reiterer, Andreas Schlotzhauer, Mathias Brandstötter
Towards Intuitive Industrial Human-Robot Collaboration System Design and Future Directions Ferdinand Fuhrmann, Wolfgang Weiß, Lucas Paletta, Bernhard Reiterer, Andreas Schlotzhauer, Mathias Brandstötter
Integrated Driving Aware System in the Real-World: Sensing, Computing and Feedback
 Integrated Driving Aware System in the Real-World: Sensing, Computing and Feedback Jung Wook Park HCI Institute Carnegie Mellon University 5000 Forbes Avenue Pittsburgh, PA, USA, 15213 jungwoop@andrew.cmu.edu
Integrated Driving Aware System in the Real-World: Sensing, Computing and Feedback Jung Wook Park HCI Institute Carnegie Mellon University 5000 Forbes Avenue Pittsburgh, PA, USA, 15213 jungwoop@andrew.cmu.edu
Overview Agents, environments, typical components
 Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Can Artificial Intelligence pass the CPL(H) Skill Test?
 Skill Test?") Flight control systems for the autonomous electric light personal-transport aircraft of the near future. Can Artificial Intelligence pass the CPL(H) Skill Test? ICAS Workshop 2017-09-11 Dr. Luuk van Dijk
Flight control systems for the autonomous electric light personal-transport aircraft of the near future. Can Artificial Intelligence pass the CPL(H) Skill Test? ICAS Workshop 2017-09-11 Dr. Luuk van Dijk
Evolutionary robotics Jørgen Nordmoen
 INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
EVERYDAY ROBOTS ASIAN CONSUMERS & ARTIFICIAL INTELLIGENCE CHINESE CONSUMERS MOST WILLING TO ADAPT. YKA Special on Artificial Intelligence YouKnowAnot
 YKA Special on Artificial Intelligence YouKnowAnot Singapore s Leading Monthly Public Survey EDAY ROBOTS ASIAN CONSUMERS & ARTIFICIAL INTELLIGENCE CHINESE CONSUMERS MOST WILLING TO ADAPT Key findings from
YKA Special on Artificial Intelligence YouKnowAnot Singapore s Leading Monthly Public Survey EDAY ROBOTS ASIAN CONSUMERS & ARTIFICIAL INTELLIGENCE CHINESE CONSUMERS MOST WILLING TO ADAPT Key findings from
Elements of Haptic Interfaces
 Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Pre-Activity Quiz. 2 feet forward in a straight line? 1. What is a design challenge? 2. How do you program a robot to move
 Maze Challenge Pre-Activity Quiz 1. What is a design challenge? 2. How do you program a robot to move 2 feet forward in a straight line? 2 Pre-Activity Quiz Answers 1. What is a design challenge? A design
Maze Challenge Pre-Activity Quiz 1. What is a design challenge? 2. How do you program a robot to move 2 feet forward in a straight line? 2 Pre-Activity Quiz Answers 1. What is a design challenge? A design
Thinking and Autonomy
 Thinking and Autonomy Prasad Tadepalli School of Electrical Engineering and Computer Science Oregon State University Turing Test (1950) The interrogator C needs to decide if he is talking to a computer
Thinking and Autonomy Prasad Tadepalli School of Electrical Engineering and Computer Science Oregon State University Turing Test (1950) The interrogator C needs to decide if he is talking to a computer
Using FMI/ SSP for Development of Autonomous Driving
 Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
Artificial Intelligence and Robotics Getting More Human
 Weekly Barometer 25 janvier 2012 Artificial Intelligence and Robotics Getting More Human July 2017 ATONRÂ PARTNERS SA 12, Rue Pierre Fatio 1204 GENEVA SWITZERLAND - Tel: + 41 22 310 15 01 http://www.atonra.ch
Weekly Barometer 25 janvier 2012 Artificial Intelligence and Robotics Getting More Human July 2017 ATONRÂ PARTNERS SA 12, Rue Pierre Fatio 1204 GENEVA SWITZERLAND - Tel: + 41 22 310 15 01 http://www.atonra.ch
AUTOMOTIVE CONTROL SYSTEMS
 AUTOMOTIVE CONTROL SYSTEMS This engineering textbook is designed to introduce advanced control systems for vehicles, including advanced automotive concepts and the next generation of vehicles for Intelligent
AUTOMOTIVE CONTROL SYSTEMS This engineering textbook is designed to introduce advanced control systems for vehicles, including advanced automotive concepts and the next generation of vehicles for Intelligent
Welcome to Informatics
 Welcome to Informatics People On the premises: ~ 100 Academic staff ~ 150 Postdoc researchers ~ 80 Support staff ~ 250 PhD students ~ 200 Masters students ~ 400 Undergraduates (200 1 st year) Graduating
Welcome to Informatics People On the premises: ~ 100 Academic staff ~ 150 Postdoc researchers ~ 80 Support staff ~ 250 PhD students ~ 200 Masters students ~ 400 Undergraduates (200 1 st year) Graduating
Artificial Intelligence
 Artificial Intelligence Lecture 01 - Introduction Edirlei Soares de Lima What is Artificial Intelligence? Artificial intelligence is about making computers able to perform the
Artificial Intelligence Lecture 01 - Introduction Edirlei Soares de Lima What is Artificial Intelligence? Artificial intelligence is about making computers able to perform the
What We Talk About When We Talk About AI
 MAGAZINE What We Talk About When We Talk About AI ARTIFICIAL INTELLIGENCE TECHNOLOGY 30 OCT 2015 W e have all seen the films, read the comics or been awed by the prophetic books, and from them we think
MAGAZINE What We Talk About When We Talk About AI ARTIFICIAL INTELLIGENCE TECHNOLOGY 30 OCT 2015 W e have all seen the films, read the comics or been awed by the prophetic books, and from them we think
MAKE SURE THE COLECOVISION OR ADAM IS OFF BEFORE INSERTING OR REMOVING A CARTRIDGE.
 Bump 'n' Jump Use with: * Coleco's Expansion Module #2 * ColecoVision Controllers * Super Action Controllers * For One or Two Players * Select from Four Skill Levels GAME DESCRIPTION BUMP 'N' JUMP is no
Bump 'n' Jump Use with: * Coleco's Expansion Module #2 * ColecoVision Controllers * Super Action Controllers * For One or Two Players * Select from Four Skill Levels GAME DESCRIPTION BUMP 'N' JUMP is no
Automatic Guidance System Development Using Low Cost Ranging Devices
 University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln Conference Presentations and White Papers: Biological Systems Engineering Biological Systems Engineering 6-2008 Automatic
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln Conference Presentations and White Papers: Biological Systems Engineering Biological Systems Engineering 6-2008 Automatic
On-demand printable robots
 On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
BEGINNER PROGRAMMING LESSON
 Basic Line Follower By Sanjay and Arvind Seshan BEGINNER PROGRAMMING LESSON LESSON OBJECTIVES 1. Learn how humans and robots follow lines 2. Learn how to get a robot to follow a line using Color Mode on
Basic Line Follower By Sanjay and Arvind Seshan BEGINNER PROGRAMMING LESSON LESSON OBJECTIVES 1. Learn how humans and robots follow lines 2. Learn how to get a robot to follow a line using Color Mode on