Introducing LISA. LISA: Laboratory for Intelligent and Safe Automobiles
|
|
|
- Collin Norris
- 5 years ago
- Views:
Transcription
1 Introducing LISA LISA: Laboratory for Intelligent and Safe Automobiles Mohan M. Trivedi University of California at San Diego Int. Workshop on Progress and Future Directions of Adaptive Driver Assistance Research National Highway Traffic Safety Administration Washington, DC May 13, 2004 Presentation Outline Research Scope LISA Overview: Video Clip Research Samples: Real-time Occupant Posture Analysis Driver View Estimation Driver Affect-State Analysis Vehicle Surround Capture Driver Behavior Analysis (Lane Change) Multitasking and Attention Concluding Remarks



2 Research Scope How to enhance Safe and Efficient Driving? Multidisciplinary Focus on: Development of Complete Driving Context Capture System Robust Computational Algorithms for Context/Intent Analysis Detailed Behavioral Analysis of Driver and Driving Tasks Mental Models for Attention and Multitasking Multimodal Interfaces for Driver Attention Management Video Clip Vision Based Smart Airbag system Scene sensing Single perspective Thermal camera Stereo system Multicamera system Feature selection and analysis Region occupancy analysis Simplified body model Detailed body model Posture categories Must not deploy Depowered deploy Must deploy





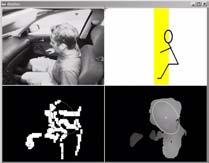
3 Stereo, Voxel, &Thermal IR Video Streams Capture in LISA-P M. M. Trivedi, S. Y. Cheng, E. M. C. Childers, S. J. Krotosky, "Occupant Posture Analysis with Stereo and Thermal Infrared Video: Algorithms and Experimental Evaluation", IEEE Trans. Vehicular Technology, 2004 Real-Time Head Tracking M. M. Trivedi, S. Y. Cheng, E. M. C. Childers, S. J. Krotosky, "Occupant Posture Analysis with Stereo and Thermal Infrared Video: Algorithms and Experimental Evaluation", IEEE Trans. Vehicular Technology, 2004,

4 Stereo vs. Thermal IR Occupant Task Male 1, 5 8 Female 1, 5 8 Female 2, 5 11 All Occupants Stereo LWIR Stereo LWIR Stereo LWIR Stereo LWIR Sit Normal Lean Halfway 73.0% 92.9% X X 82.8% Lean Forward 76.4% 0.9% X X X X 76.4% 0.9% Return to Normal % 98.0% 98.0% 99.6% 97.4% Lean Back Return to Normal 2 Lean Right 52.1% 97.8% 96.7% 99.1% 92.1% Lean Left 98.9% X X 97.7% 98.4% 99.7% Return to Normal 3 Position Test Totals (Number of Frames) 97.3% (940) 80.3% (776) 99.8% (537) 98.7% (531) 98.7% (676) 99.1% (679) 98.4% (2153) 91.7% (1986) Move Hands about cabin 78.1% 97.4% 97.8% 99.1% 91.6% 99.2% Open the glove box 95.5% 74.3% 97.6% 91.2% 97.8% Put hands on face & stretch 81.7% 85.2% 87.8% 89.4% 90.0% 91.3% Adjust car radio 99.4% 99.8% Place hat in lap 97.5% 97.7% 97.9% Put hat on head 90.0% 84.3% 90.5% 35.7% 93.3% 95.2% 85.2% Move with hat 98.8% 87.9% 68.3% 92.6% 62.8% 96.5% 71.0% Remove Hat 62.1% 94.9% Feet on Dashboard Hand Motion & Object Test Totals (Number of Frames) Free Motion Test (Number of Frames) All Test Totals (Number of Frames) 92.6% (1399) (493) 95.4% (2832) 94.5% 97.4% (1471) 87.4% (431) 90.2% (2678) 99.8% (1939) 99.8% (470) 99.8% (2946) 76.4% 85.7% (1665) 95.5% (450) 89.6% (2646) 93.9% 92.0% (2258) 95.8% (942) 94.0% (3876) 90.5% (2221) 86.1% (846) 90.9% (3746) M. M. Trivedi, S. Y. Cheng, E. M. C. Childers, S. J. Krotosky, "Occupant Posture Analysis with Stereo and Thermal Infrared Video: Algorithms and Experimental Evaluation", IEEE Trans. Vehicular Technology, 2004, 98.3% 94.8% (5596) 97.9% (1905) 96.2% (9654) 87.3% 90.9% (5357) 88.9% (1727) 90.3% (9070) Tracking Body Parts and Objects S. Krotosky and M. M. Trivedi, "Occupant Posture Analysis using Reflectance and Stereo Images for "Smart" Airbag Deployment" IEEE International Symposium on Intelligent Vehicles, Parma, Italy, 2004

5 3-D Body Modeling and Tracking S. Y. Cheng and M. M. Trivedi, "Human Posture Estimation Using Voxel Data for "Smart" Airbag Systems: Issues and Framework" IEEE International Symposium on Intelligent Vehicles, Parma, Italy, 2004 I. Mikic, M. Trivedi, E. Hunter, P. Cosman, "Human Body Model Acquisition and Tracking using Voxel Data," International Journal of Computer Vision, , July Human Centered Intelligent Driving Support System - Environment Model (ESA) -Traffic Volume -Pedestrians -Obstacles -Illumination, etc. Vehicle Model (VSA) -Location -Velocity -Acceleration -Engine, Fuel, etc. Contextt Layer Selection Hierarchical Context Processing Global Processing ODI & Panorama Driver Model (DSA) -Work/Cognition Load -Mental State -Driving Style -Risk Field, etc. Task s Context Attention, Task, and Driver Model Cognitive bottlenecks Prioritization Interrupts Uncertainty vs. Criticality Learning and Training Multimodal cues Psychology Prof. Hal Pashler, Dr. J. Levy Vision and Intelligent Systems Prof. Mohan Trivedi Prof. Bhaskar Rao Dr. T. Gandhi Detailed Processing (Examples) Traffic / Lane Detection Maneuver / Eye Gaze Driver s View Synthesis Driving Ecology Sensing Driver & Environment Context Vehicle Sensing ODVS Net Vehicle Control Steering Wheel Brake/Throttle Paddle Rectilinear Gear Station Camera Net Navigation GPS Microphone Traffic Radio Array Camera Networks In-Vehicle Activity Radar & Laser Range Cellular Phone Sonar Range Radio/CD Chang er Intelligent Driver Support Interface Distributed cognition Continuous Warning Modalities: Flashes, Beeps, Force Feedbacks, etc. Structure of Warning Strength of Warning Ethnographic studies Negotiated Access Cognitive Science Prof. Jim Hollan, Dr. D. Forster Dr. Erwin Boer Environment Natural Driving Control Driver Vehicle

 to capture detailed dynamics. K. Huang, M. Trivedi, T.")



6 Driver Head-Pose and View Estimation with a single Omni-video Stream Source omnidirectional video Unwarped panoramic video Unwarped perspective video on driver seat Challenges: Drastic illumination changes, both on brightness and color. High frame rate (30fps) to capture detailed dynamics. K. Huang, M. Trivedi, T. Gandhi, "Driver's View and Vehicle Surround Estimation using Omnidirectional Video Stream," Proc. IEEE Intelligent Vehicles Symposium, June Driver s view: 30 right Driver s head detection/tracking Face/gaze direction estimation Relative angle to camera Results: Occluded Face Driver Seat Head Detection Head Tracking Driver s Face Estimated Driver s View K. Huang, M. Trivedi, T. Gandhi, "Driver's View and Vehicle Surround Estimation using Omnidirectional Video Stream," Proc. IEEE Intelligent Vehicles Symposium, June 2003.












7 Head and Face Orientation Estimation K. Huang, M. Trivedi, T. Gandhi, "Driver's View and Vehicle Surround Estimation using Omnidirectional Video Stream," Proc. IEEE Intelligent Vehicles Symposium, June Initialization Driver Affect Analysis Feature Tracking Feature Selection Bayesian Estimation and Affect Classification Eyebrow Distance Mouth Curvature J. McCall, S. Mallick, M. Trivedi, "Real-Time Driver Affect Analysis and Tele-viewing System," Intelligent Vehicles Symposium, Proceedings. IEEE, June 2003.




8 Driver Affect Face Landmarks tracked in real-time Thin-plate spline warping separates rigid head motion from non-rigid face affect motion Warping parameter is classified into face affect or expressions J. McCall and M. M. Trivedi, "Pose Invariant Affect Analysis using Thin-Plate Splines" Proceedings of International Conference on Pattern Recognition 2004 Full Surround Capture: an Integrated Approach T. Gandhi and M. M. Trivedi, "Motion Based Vehicle Surround Analysis Using Omni-Directional Camera," Proc. IEEE Intelligent Vehicles Symposium, June 2004, O. Achler and M. M. Trivedi, "Vehicle Wheel Detector using 2D Filter Banks," Proc. IEEE Intelligent Vehicles Symposium, June 2004, J. McCall and M. M. Trivedi, "An integrated, robust approach to lane marking detection and lane tracking," Proc. IEEE Intelligent Vehicles Symposium, June 2004




9 LISA-Q: A Novel Test-bed J. McCall, O. Achler and M. M. Trivedi, "Design of an Instrumented Vehicle Testbed for Developing Human Centered Driver Support System," Proc. IEEE Intelligent Vehicles Symposium, June 2004 Capable of extracting multiple modalities of sensor information for recording and/or processing CAN Bus Steering angle, pedal positions, vehicle speed, etc. LASER RADAR distance to lead vehicle 8 full frame video streams Omnidirection cameras for 360 surround Forward and rear facing rectilinear cameras Rectilinear camera facing driver Near-IR camera facing feet and pedals Rectilinear camera mounted on headband for drivers view GPS data PC in trunk for data collection/processing LISA-Q Test Bed J. McCall, O. Achler and M. M. Trivedi, "Design of an Instrumented Vehicle Testbed for Developing Human Centered Driver Support System," Proc. IEEE Intelligent Vehicles Symposium, June 2004

10 Context Capture T. Gandhi and M. M. Trivedi, "Motion Based Vehicle Surround Analysis Using Omni-Directional Camera," Proc. IEEE Intelligent Vehicles Symposium, June 2004 Sensor Fusion for Context Capture
11 Ethnographic analysis Study natural situations of activity Confront heterogeneous data: environment, Driver s behavior Driver s verbalization during action and after Questionnaire, Determine what is going on with the people Characterize meaning and expectation Behavioral patterns Automatic detection from system/movies Cheaper in time and effort Allows analysis and comparison on large scale Open possibilities of detection by the system Give traces of driver s activity/context Lane position => trajectory management Head movement => control on traffic and road Foot activity on gas/break => Speed management Find patterns to: test similarities/differences between drivers/situation predict the driver s situation?



12 Behavioral Data Collection Lateral position Speech Head movement Foot activity Gas/ break Extracted from the movies GPS location of the timeline Steering angle ACC Distance of target car From the car system THW TTC LC5 9:58 Expect exit Attention Traffic Chatting Speed Open in front Road Preparation Execution 10:16 In LC Chatting Open in front / next lane Maintain speed Distributed Control Centers
 Small look right (mirror) Medium look right (window)")
 Look passenger Big look left (over")
 Automatic detection Wheel and hand position Ethnographic")

13 Head and Gaze Movement Categories Ethnographic categories Look up (rear mirror) Small look right (mirror) Medium look right (window) Big look right (over shoulder) Look forward Small Down (speed) Small look Left (mirror) Look passenger Big look left (over shoulder) Very big look right (maneuver) Very big left right (maneuver) Automatic detection Wheel and hand position Ethnographic categories of hand position Right Lef t Problematic for Automatic Coding: System measure of steering angle NO HANDS VISIBLE





14 Foot position Ethnographic categories of foot position On the gas Hovering the gas Feet free Gas Vs Brake Hovering the brake On the brake Automatic detection Speech detection Automatic detection of moment of speech Use of speech detection for transcription and coding
15 Lane Changing1 checks directions look right over shoulder looks right (side) Says 15 Hand s p d is u t h an 10 Righ down &2 21min21sec (21.36min) 21min31sec 21.52min.. 10&2 21min51sec 22min1sec 22.02min 21.86min 21min41sec 21.69min No more cars, signs for an exit On exit lane to 15 Freeway Sign for 15 car on right lane Lane Changing1 Hands Hands down 10 & 2 15 Right on top other down 10 & 2 Yeah Is this the 15? Getting space to think 15
16 Observations: steps of LC 1. Awareness of instability, caused by: LC1: Road, do not want to miss exit LC2: Traffic, passing a truck Change in preparation state : an intent is formed LC1: During sequence, LC2: Before sequence, when get blocked by truck 2. Physical preparation: get ready for action placing hands checking conditions (spot in lane) changing speed to get the spot (in LC2 only) 3. Execution: Checking if no car coming Acceleration Stabilization of the trajectory / checking car in new lane Concluding Remarks HC-IDSS brings disciplines closer HC-IDSS will continue to challenging research community Current Efforts are focused on Automatic Context Extraction Intent Analysis Multimodal (Audio, Visual, Haptic) Interfaces Integrated System Evaluation Thanks!! Website:cvrr.ucsd.edu/LISA User name: guest Distributed Control Centers Password: cvrr
Design of an Instrumented Vehicle Test Bed for Developing a Human Centered Driver Support System
 Design of an Instrumented Vehicle Test Bed for Developing a Human Centered Driver Support System Joel C. McCall, Ofer Achler, Mohan M. Trivedi jmccall@ucsd.edu, oachler@ucsd.edu, mtrivedi@ucsd.edu Computer
Design of an Instrumented Vehicle Test Bed for Developing a Human Centered Driver Support System Joel C. McCall, Ofer Achler, Mohan M. Trivedi jmccall@ucsd.edu, oachler@ucsd.edu, mtrivedi@ucsd.edu Computer
Driver Assistance for "Keeping Hands on the Wheel and Eyes on the Road"
 ICVES 2009 Driver Assistance for "Keeping Hands on the Wheel and Eyes on the Road" Cuong Tran and Mohan Manubhai Trivedi Laboratory for Intelligent and Safe Automobiles (LISA) University of California
ICVES 2009 Driver Assistance for "Keeping Hands on the Wheel and Eyes on the Road" Cuong Tran and Mohan Manubhai Trivedi Laboratory for Intelligent and Safe Automobiles (LISA) University of California
Towards a Vision-based System Exploring 3D Driver Posture Dynamics for Driver Assistance: Issues and Possibilities
 2010 IEEE Intelligent Vehicles Symposium University of California, San Diego, CA, USA June 21-24, 2010 TuB1.30 Towards a Vision-based System Exploring 3D Driver Posture Dynamics for Driver Assistance:
2010 IEEE Intelligent Vehicles Symposium University of California, San Diego, CA, USA June 21-24, 2010 TuB1.30 Towards a Vision-based System Exploring 3D Driver Posture Dynamics for Driver Assistance:
A Multimodal Approach for Dynamic Event Capture of Vehicles and Pedestrians
 A Multimodal Approach for Dynamic Event Capture of Vehicles and Pedestrians Jeffrey Ploetner Computer Vision and Robotics Research Laboratory (CVRR) University of California, San Diego La Jolla, CA 9293,
A Multimodal Approach for Dynamic Event Capture of Vehicles and Pedestrians Jeffrey Ploetner Computer Vision and Robotics Research Laboratory (CVRR) University of California, San Diego La Jolla, CA 9293,
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles
 Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
Understanding Head and Hand Activities and Coordination in Naturalistic Driving Videos
 214 IEEE Intelligent Vehicles Symposium (IV) June 8-11, 214. Dearborn, Michigan, USA Understanding Head and Hand Activities and Coordination in Naturalistic Driving Videos Sujitha Martin 1, Eshed Ohn-Bar
214 IEEE Intelligent Vehicles Symposium (IV) June 8-11, 214. Dearborn, Michigan, USA Understanding Head and Hand Activities and Coordination in Naturalistic Driving Videos Sujitha Martin 1, Eshed Ohn-Bar
Map Interface for Geo-Registering and Monitoring Distributed Events
 2010 13th International IEEE Annual Conference on Intelligent Transportation Systems Madeira Island, Portugal, September 19-22, 2010 TB1.5 Map Interface for Geo-Registering and Monitoring Distributed Events
2010 13th International IEEE Annual Conference on Intelligent Transportation Systems Madeira Island, Portugal, September 19-22, 2010 TB1.5 Map Interface for Geo-Registering and Monitoring Distributed Events
Prof Trivedi ECE253A Notes for Students only
 ECE 253A: Digital Processing: Course Related Class Website: https://sites.google.com/a/eng.ucsd.edu/ece253fall2017/ Course Graduate Assistants: Nachiket Deo Borhan Vasili Kirill Pirozenko Piazza Grading:
ECE 253A: Digital Processing: Course Related Class Website: https://sites.google.com/a/eng.ucsd.edu/ece253fall2017/ Course Graduate Assistants: Nachiket Deo Borhan Vasili Kirill Pirozenko Piazza Grading:
A Multimodal Framework for Vehicle and Traffic Flow Analysis
 Proceedings of the IEEE ITSC 26 26 IEEE Intelligent Transportation Systems Conference Toronto, Canada, September 17-2, 26 WB3.1 A Multimodal Framework for Vehicle and Traffic Flow Analysis Jeffrey Ploetner
Proceedings of the IEEE ITSC 26 26 IEEE Intelligent Transportation Systems Conference Toronto, Canada, September 17-2, 26 WB3.1 A Multimodal Framework for Vehicle and Traffic Flow Analysis Jeffrey Ploetner
STUDY OF VARIOUS TECHNIQUES FOR DRIVER BEHAVIOR MONITORING AND RECOGNITION SYSTEM
 INTERNATIONAL JOURNAL OF COMPUTER ENGINEERING & TECHNOLOGY (IJCET) Proceedings of the International Conference on Emerging Trends in Engineering and Management (ICETEM14) ISSN 0976 6367(Print) ISSN 0976
INTERNATIONAL JOURNAL OF COMPUTER ENGINEERING & TECHNOLOGY (IJCET) Proceedings of the International Conference on Emerging Trends in Engineering and Management (ICETEM14) ISSN 0976 6367(Print) ISSN 0976
Vision on Wheels: Looking at Driver, Vehicle, and Surround for On-Road Maneuver Analysis
 IEEE Conference on Computer Vision and Pattern Recognition Workshops - Mobile Vision 2014 Vision on Wheels: Looking at Driver, Vehicle, and Surround for On-Road Maneuver Analysis Eshed Ohn-Bar, Ashish
IEEE Conference on Computer Vision and Pattern Recognition Workshops - Mobile Vision 2014 Vision on Wheels: Looking at Driver, Vehicle, and Surround for On-Road Maneuver Analysis Eshed Ohn-Bar, Ashish
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
interactive IP: Perception platform and modules
 interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
Integrated Driving Aware System in the Real-World: Sensing, Computing and Feedback
 Integrated Driving Aware System in the Real-World: Sensing, Computing and Feedback Jung Wook Park HCI Institute Carnegie Mellon University 5000 Forbes Avenue Pittsburgh, PA, USA, 15213 jungwoop@andrew.cmu.edu
Integrated Driving Aware System in the Real-World: Sensing, Computing and Feedback Jung Wook Park HCI Institute Carnegie Mellon University 5000 Forbes Avenue Pittsburgh, PA, USA, 15213 jungwoop@andrew.cmu.edu
Platform-Based Design of Augmented Cognition Systems. Latosha Marshall & Colby Raley ENSE623 Fall 2004
 Platform-Based Design of Augmented Cognition Systems Latosha Marshall & Colby Raley ENSE623 Fall 2004 Design & implementation of Augmented Cognition systems: Modular design can make it possible Platform-based
Platform-Based Design of Augmented Cognition Systems Latosha Marshall & Colby Raley ENSE623 Fall 2004 Design & implementation of Augmented Cognition systems: Modular design can make it possible Platform-based
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed
 AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Image Processing Based Vehicle Detection And Tracking System
 Image Processing Based Vehicle Detection And Tracking System Poonam A. Kandalkar 1, Gajanan P. Dhok 2 ME, Scholar, Electronics and Telecommunication Engineering, Sipna College of Engineering and Technology,
Image Processing Based Vehicle Detection And Tracking System Poonam A. Kandalkar 1, Gajanan P. Dhok 2 ME, Scholar, Electronics and Telecommunication Engineering, Sipna College of Engineering and Technology,
Automatic Maneuver Recognition in the Automobile: the Fusion of Uncertain Sensor Values using Bayesian Models
 Automatic Maneuver Recognition in the Automobile: the Fusion of Uncertain Sensor Values using Bayesian Models Arati Gerdes Institute of Transportation Systems German Aerospace Center, Lilienthalplatz 7,
Automatic Maneuver Recognition in the Automobile: the Fusion of Uncertain Sensor Values using Bayesian Models Arati Gerdes Institute of Transportation Systems German Aerospace Center, Lilienthalplatz 7,
Traffic Management for Smart Cities TNK115 SMART CITIES
 Traffic Management for Smart Cities TNK115 SMART CITIES DAVID GUNDLEGÅRD DIVISION OF COMMUNICATION AND TRANSPORT SYSTEMS Outline Introduction Traffic sensors Traffic models Frameworks Information VS Control
Traffic Management for Smart Cities TNK115 SMART CITIES DAVID GUNDLEGÅRD DIVISION OF COMMUNICATION AND TRANSPORT SYSTEMS Outline Introduction Traffic sensors Traffic models Frameworks Information VS Control
C-ITS Platform WG9: Implementation issues Topic: Road Safety Issues 1 st Meeting: 3rd December 2014, 09:00 13:00. Draft Agenda
 C-ITS Platform WG9: Implementation issues Topic: Road Safety Issues 1 st Meeting: 3rd December 2014, 09:00 13:00 Venue: Rue Philippe Le Bon 3, Room 2/17 (Metro Maalbek) Draft Agenda 1. Welcome & Presentations
C-ITS Platform WG9: Implementation issues Topic: Road Safety Issues 1 st Meeting: 3rd December 2014, 09:00 13:00 Venue: Rue Philippe Le Bon 3, Room 2/17 (Metro Maalbek) Draft Agenda 1. Welcome & Presentations
Invited talk IET-Renault Workshop Autonomous Vehicles: From theory to full scale applications Novotel Paris Les Halles, June 18 th 2015
 Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
Chapter 30 Vision for Driver Assistance: Looking at People in a Vehicle
 Chapter 30 Vision for Driver Assistance: Looking at People in a Vehicle Cuong Tran and Mohan Manubhai Trivedi Abstract An important real-life application domain of computer vision techniques looking at
Chapter 30 Vision for Driver Assistance: Looking at People in a Vehicle Cuong Tran and Mohan Manubhai Trivedi Abstract An important real-life application domain of computer vision techniques looking at
Real Time and Non-intrusive Driver Fatigue Monitoring
 Real Time and Non-intrusive Driver Fatigue Monitoring Qiang Ji and Zhiwei Zhu jiq@rpi rpi.edu Intelligent Systems Lab Rensselaer Polytechnic Institute (RPI) Supported by AFOSR and Honda Introduction Motivation:
Real Time and Non-intrusive Driver Fatigue Monitoring Qiang Ji and Zhiwei Zhu jiq@rpi rpi.edu Intelligent Systems Lab Rensselaer Polytechnic Institute (RPI) Supported by AFOSR and Honda Introduction Motivation:
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
White paper on CAR28T millimeter wave radar
 White paper on CAR28T millimeter wave radar Hunan Nanoradar Science and Technology Co., Ltd. Version history Date Version Version description 2017-07-13 1.0 the 1st version of white paper on CAR28T Contents
White paper on CAR28T millimeter wave radar Hunan Nanoradar Science and Technology Co., Ltd. Version history Date Version Version description 2017-07-13 1.0 the 1st version of white paper on CAR28T Contents
SAfety VEhicles using adaptive Interface Technology (SAVE-IT): A Program Overview
: A Program Overview") SAfety VEhicles using adaptive Interface Technology (SAVE-IT): A Program Overview SAVE-IT David W. Eby,, PhD University of Michigan Transportation Research Institute International Distracted Driving Conference
SAfety VEhicles using adaptive Interface Technology (SAVE-IT): A Program Overview SAVE-IT David W. Eby,, PhD University of Michigan Transportation Research Institute International Distracted Driving Conference
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
THE SCHOOL BUS. Figure 1
 THE SCHOOL BUS Federal Motor Vehicle Safety Standards (FMVSS) 571.111 Standard 111 provides the requirements for rear view mirror systems for road vehicles, including the school bus in the US. The Standards
THE SCHOOL BUS Federal Motor Vehicle Safety Standards (FMVSS) 571.111 Standard 111 provides the requirements for rear view mirror systems for road vehicles, including the school bus in the US. The Standards
Design Process. ERGONOMICS in. the Automotive. Vivek D. Bhise. CRC Press. Taylor & Francis Group. Taylor & Francis Group, an informa business
 ERGONOMICS in the Automotive Design Process Vivek D. Bhise CRC Press Taylor & Francis Group Boca Raton London New York CRC Press is an imprint of the Taylor & Francis Group, an informa business Contents
ERGONOMICS in the Automotive Design Process Vivek D. Bhise CRC Press Taylor & Francis Group Boca Raton London New York CRC Press is an imprint of the Taylor & Francis Group, an informa business Contents
Early Take-Over Preparation in Stereoscopic 3D
 Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI 18), September 23 25, 2018, Toronto, Canada. Early Take-Over
Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI 18), September 23 25, 2018, Toronto, Canada. Early Take-Over
Designing A Human Vehicle Interface For An Intelligent Community Vehicle
 Designing A Human Vehicle Interface For An Intelligent Community Vehicle Kin Kok Lee, Yong Tsui Lee and Ming Xie School of Mechanical & Production Engineering Nanyang Technological University Nanyang Avenue
Designing A Human Vehicle Interface For An Intelligent Community Vehicle Kin Kok Lee, Yong Tsui Lee and Ming Xie School of Mechanical & Production Engineering Nanyang Technological University Nanyang Avenue
Driver Education Classroom and In-Car Curriculum Unit 3 Space Management System
 Driver Education Classroom and In-Car Curriculum Unit 3 Space Management System Driver Education Classroom and In-Car Instruction Unit 3-2 Unit Introduction Unit 3 will introduce operator procedural and
Driver Education Classroom and In-Car Curriculum Unit 3 Space Management System Driver Education Classroom and In-Car Instruction Unit 3-2 Unit Introduction Unit 3 will introduce operator procedural and
DAARIA: Driver Assistance by Augmented Reality for Intelligent Automotive
 Author manuscript, published in "2012 IEEE Intelligent Vehicles Symposium, Spain (2012)" DAARIA: Driver Assistance by Augmented Reality for Intelligent Automotive Paul George, Indira Thouvenin, Vincent
Author manuscript, published in "2012 IEEE Intelligent Vehicles Symposium, Spain (2012)" DAARIA: Driver Assistance by Augmented Reality for Intelligent Automotive Paul George, Indira Thouvenin, Vincent
PerSec. Pervasive Computing and Security Lab. Enabling Transportation Safety Services Using Mobile Devices
 PerSec Pervasive Computing and Security Lab Enabling Transportation Safety Services Using Mobile Devices Jie Yang Department of Computer Science Florida State University Oct. 17, 2017 CIS 5935 Introduction
PerSec Pervasive Computing and Security Lab Enabling Transportation Safety Services Using Mobile Devices Jie Yang Department of Computer Science Florida State University Oct. 17, 2017 CIS 5935 Introduction
Ant? Bird? Dog? Human -SURE
 ECE 172A: Intelligent Systems: Introduction Week 1 (October 1, 2007): Course Introduction and Announcements Intelligent Robots as Intelligent Systems A systems perspective of Intelligent Robots and capabilities
ECE 172A: Intelligent Systems: Introduction Week 1 (October 1, 2007): Course Introduction and Announcements Intelligent Robots as Intelligent Systems A systems perspective of Intelligent Robots and capabilities
A VIDEO CAMERA ROAD SIGN SYSTEM OF THE EARLY WARNING FROM COLLISION WITH THE WILD ANIMALS
 Vol. 12, Issue 1/2016, 42-46 DOI: 10.1515/cee-2016-0006 A VIDEO CAMERA ROAD SIGN SYSTEM OF THE EARLY WARNING FROM COLLISION WITH THE WILD ANIMALS Slavomir MATUSKA 1*, Robert HUDEC 2, Patrik KAMENCAY 3,
Vol. 12, Issue 1/2016, 42-46 DOI: 10.1515/cee-2016-0006 A VIDEO CAMERA ROAD SIGN SYSTEM OF THE EARLY WARNING FROM COLLISION WITH THE WILD ANIMALS Slavomir MATUSKA 1*, Robert HUDEC 2, Patrik KAMENCAY 3,
Balancing Privacy and Safety: Protecting Driver Identity in Naturalistic Driving Video Data
 Balancing Privacy and Safety: Protecting Driver Identity in Naturalistic Driving Video Data Sujitha Martin Laboratory of Intelligent and Safe Automobiles UCSD - La Jolla, CA, USA scmartin@ucsd.edu Ashish
Balancing Privacy and Safety: Protecting Driver Identity in Naturalistic Driving Video Data Sujitha Martin Laboratory of Intelligent and Safe Automobiles UCSD - La Jolla, CA, USA scmartin@ucsd.edu Ashish
An Architecture for Intelligent Automotive Collision Avoidance Systems
 IVSS-2003-UMS-07 An Architecture for Intelligent Automotive Collision Avoidance Systems Syed Masud Mahmud and Shobhit Shanker Department of Electrical and Computer Engineering, Wayne State University,
IVSS-2003-UMS-07 An Architecture for Intelligent Automotive Collision Avoidance Systems Syed Masud Mahmud and Shobhit Shanker Department of Electrical and Computer Engineering, Wayne State University,
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Kinect Interface for UC-win/Road: Application to Tele-operation of Small Robots
 Kinect Interface for UC-win/Road: Application to Tele-operation of Small Robots Hafid NINISS Forum8 - Robot Development Team Abstract: The purpose of this work is to develop a man-machine interface for
Kinect Interface for UC-win/Road: Application to Tele-operation of Small Robots Hafid NINISS Forum8 - Robot Development Team Abstract: The purpose of this work is to develop a man-machine interface for
Using Driving Simulator for Advance Placement of Guide Sign Design for Exits along Highways
 Using Driving Simulator for Advance Placement of Guide Sign Design for Exits along Highways Fengxiang Qiao, Xiaoyue Liu, and Lei Yu Department of Transportation Studies Texas Southern University 3100 Cleburne
Using Driving Simulator for Advance Placement of Guide Sign Design for Exits along Highways Fengxiang Qiao, Xiaoyue Liu, and Lei Yu Department of Transportation Studies Texas Southern University 3100 Cleburne
EVALUATION OF DIFFERENT MODALITIES FOR THE INTELLIGENT COOPERATIVE INTERSECTION SAFETY SYSTEM (IRIS) AND SPEED LIMIT SYSTEM
 AND SPEED LIMIT SYSTEM") Effects of ITS on drivers behaviour and interaction with the systems EVALUATION OF DIFFERENT MODALITIES FOR THE INTELLIGENT COOPERATIVE INTERSECTION SAFETY SYSTEM (IRIS) AND SPEED LIMIT SYSTEM Ellen S.
Effects of ITS on drivers behaviour and interaction with the systems EVALUATION OF DIFFERENT MODALITIES FOR THE INTELLIGENT COOPERATIVE INTERSECTION SAFETY SYSTEM (IRIS) AND SPEED LIMIT SYSTEM Ellen S.
Auto und Umwelt - das Auto als Plattform für Interaktive
 Der Fahrer im Dialog mit Auto und Umwelt - das Auto als Plattform für Interaktive Anwendungen Prof. Dr. Albrecht Schmidt Pervasive Computing University Duisburg-Essen http://www.pervasive.wiwi.uni-due.de/
Der Fahrer im Dialog mit Auto und Umwelt - das Auto als Plattform für Interaktive Anwendungen Prof. Dr. Albrecht Schmidt Pervasive Computing University Duisburg-Essen http://www.pervasive.wiwi.uni-due.de/
Fusion in EU projects and the Perception Approach. Dr. Angelos Amditis interactive Summer School 4-6 July, 2012
 Fusion in EU projects and the Perception Approach Dr. Angelos Amditis interactive Summer School 4-6 July, 2012 Content Introduction Data fusion in european research projects EUCLIDE PReVENT-PF2 SAFESPOT
Fusion in EU projects and the Perception Approach Dr. Angelos Amditis interactive Summer School 4-6 July, 2012 Content Introduction Data fusion in european research projects EUCLIDE PReVENT-PF2 SAFESPOT
Activity monitoring and summarization for an intelligent meeting room
 IEEE Workshop on Human Motion, Austin, Texas, December 2000 Activity monitoring and summarization for an intelligent meeting room Ivana Mikic, Kohsia Huang, Mohan Trivedi Computer Vision and Robotics Research
IEEE Workshop on Human Motion, Austin, Texas, December 2000 Activity monitoring and summarization for an intelligent meeting room Ivana Mikic, Kohsia Huang, Mohan Trivedi Computer Vision and Robotics Research
Research Seminar. Stefano CARRINO fr.ch
 Research Seminar Stefano CARRINO stefano.carrino@hefr.ch http://aramis.project.eia- fr.ch 26.03.2010 - based interaction Characterization Recognition Typical approach Design challenges, advantages, drawbacks
Research Seminar Stefano CARRINO stefano.carrino@hefr.ch http://aramis.project.eia- fr.ch 26.03.2010 - based interaction Characterization Recognition Typical approach Design challenges, advantages, drawbacks
Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity
 Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity Zak M. Kassas Autonomous Systems Perception, Intelligence, and Navigation (ASPIN) Laboratory University of California, Riverside
Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity Zak M. Kassas Autonomous Systems Perception, Intelligence, and Navigation (ASPIN) Laboratory University of California, Riverside
Intelligent driving TH« TNO I Innovation for live
 Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results
 SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
Current Technologies in Vehicular Communications
 Current Technologies in Vehicular Communications George Dimitrakopoulos George Bravos Current Technologies in Vehicular Communications George Dimitrakopoulos Department of Informatics and Telematics Harokopio
Current Technologies in Vehicular Communications George Dimitrakopoulos George Bravos Current Technologies in Vehicular Communications George Dimitrakopoulos Department of Informatics and Telematics Harokopio
White paper on CAR150 millimeter wave radar
 White paper on CAR150 millimeter wave radar Hunan Nanoradar Science and Technology Co.,Ltd. Version history Date Version Version description 2017-02-23 1.0 The 1 st version of white paper on CAR150 Contents
White paper on CAR150 millimeter wave radar Hunan Nanoradar Science and Technology Co.,Ltd. Version history Date Version Version description 2017-02-23 1.0 The 1 st version of white paper on CAR150 Contents
WB2306 The Human Controller
 Simulation WB2306 The Human Controller Class 1. General Introduction Adapt the device to the human, not the human to the device! Teacher: David ABBINK Assistant professor at Delft Haptics Lab (www.delfthapticslab.nl)
Simulation WB2306 The Human Controller Class 1. General Introduction Adapt the device to the human, not the human to the device! Teacher: David ABBINK Assistant professor at Delft Haptics Lab (www.delfthapticslab.nl)
Pedestrian Detection Using On-board Far-InfraRed Cameras
 Vol. 47 No. SIG 5(CVIM 13) Mar. 2006 IV2005 OTCBVS 05 2 Pedestrian Detection Using On-board Far-InfraRed Cameras Masayoshi Aoki and Noboru Yasuda There are many active researches on pedestrian detection
Vol. 47 No. SIG 5(CVIM 13) Mar. 2006 IV2005 OTCBVS 05 2 Pedestrian Detection Using On-board Far-InfraRed Cameras Masayoshi Aoki and Noboru Yasuda There are many active researches on pedestrian detection
Roadside Range Sensors for Intersection Decision Support
 Roadside Range Sensors for Intersection Decision Support Arvind Menon, Alec Gorjestani, Craig Shankwitz and Max Donath, Member, IEEE Abstract The Intelligent Transportation Institute at the University
Roadside Range Sensors for Intersection Decision Support Arvind Menon, Alec Gorjestani, Craig Shankwitz and Max Donath, Member, IEEE Abstract The Intelligent Transportation Institute at the University
Intelligent Technology for More Advanced Autonomous Driving
 FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
A Vehicular Visual Tracking System Incorporating Global Positioning System
 A Vehicular Visual Tracking System Incorporating Global Positioning System Hsien-Chou Liao and Yu-Shiang Wang Abstract Surveillance system is widely used in the traffic monitoring. The deployment of cameras
A Vehicular Visual Tracking System Incorporating Global Positioning System Hsien-Chou Liao and Yu-Shiang Wang Abstract Surveillance system is widely used in the traffic monitoring. The deployment of cameras
Driver Assistance Systems (DAS)
") Driver Assistance Systems (DAS) Short Overview László Czúni University of Pannonia What is DAS? DAS: electronic systems helping the driving of a vehicle ADAS (advanced DAS): the collection of systems and
Driver Assistance Systems (DAS) Short Overview László Czúni University of Pannonia What is DAS? DAS: electronic systems helping the driving of a vehicle ADAS (advanced DAS): the collection of systems and
HOT Enforcement. Prospects for an Automated Solution. Ginger Goodin, P.E. Texas Transportation Institute
 HOT Enforcement Prospects for an Automated Solution Ginger Goodin, P.E. Texas Transportation Institute Automated Vehicle-Occupancy Verification Technologies Study HOV Pooled Fund Study California Georgia
HOT Enforcement Prospects for an Automated Solution Ginger Goodin, P.E. Texas Transportation Institute Automated Vehicle-Occupancy Verification Technologies Study HOV Pooled Fund Study California Georgia
Active Safety Systems Development and Driver behavior Modeling: A Literature Survey
 Advance in Electronic and Electric Engineering. ISSN 2231-1297, Volume 3, Number 9 (2013) pp. 1153-1166 Research India Publications http://www.ripublication.com/aeee.htm Active Safety Systems Development
Advance in Electronic and Electric Engineering. ISSN 2231-1297, Volume 3, Number 9 (2013) pp. 1153-1166 Research India Publications http://www.ripublication.com/aeee.htm Active Safety Systems Development
PerSEE: a Central Sensors Fusion Electronic Control Unit for the development of perception-based ADAS
 10-4 MVA2015 IAPR International Conference on Machine Vision Applications, May 18-22, 2015, Tokyo, JAPAN PerSEE: a Central Sensors Fusion Electronic Control Unit for the development of perception-based
10-4 MVA2015 IAPR International Conference on Machine Vision Applications, May 18-22, 2015, Tokyo, JAPAN PerSEE: a Central Sensors Fusion Electronic Control Unit for the development of perception-based
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
The Perception of Optical Flow in Driving Simulators
 University of Iowa Iowa Research Online Driving Assessment Conference 2009 Driving Assessment Conference Jun 23rd, 12:00 AM The Perception of Optical Flow in Driving Simulators Zhishuai Yin Northeastern
University of Iowa Iowa Research Online Driving Assessment Conference 2009 Driving Assessment Conference Jun 23rd, 12:00 AM The Perception of Optical Flow in Driving Simulators Zhishuai Yin Northeastern
Gesture Recognition with Real World Environment using Kinect: A Review
 Gesture Recognition with Real World Environment using Kinect: A Review Prakash S. Sawai 1, Prof. V. K. Shandilya 2 P.G. Student, Department of Computer Science & Engineering, Sipna COET, Amravati, Maharashtra,
Gesture Recognition with Real World Environment using Kinect: A Review Prakash S. Sawai 1, Prof. V. K. Shandilya 2 P.G. Student, Department of Computer Science & Engineering, Sipna COET, Amravati, Maharashtra,
P1.4. Light has to go where it is needed: Future Light Based Driver Assistance Systems
 Light has to go where it is needed: Future Light Based Driver Assistance Systems Thomas Könning¹, Christian Amsel¹, Ingo Hoffmann² ¹ Hella KGaA Hueck & Co., Lippstadt, Germany ² Hella-Aglaia Mobile Vision
Light has to go where it is needed: Future Light Based Driver Assistance Systems Thomas Könning¹, Christian Amsel¹, Ingo Hoffmann² ¹ Hella KGaA Hueck & Co., Lippstadt, Germany ² Hella-Aglaia Mobile Vision
Transportation Informatics Group, ALPEN-ADRIA University of Klagenfurt. Transportation Informatics Group University of Klagenfurt 3/10/2009 1
 Machine Vision Transportation Informatics Group University of Klagenfurt Alireza Fasih, 2009 3/10/2009 1 Address: L4.2.02, Lakeside Park, Haus B04, Ebene 2, Klagenfurt-Austria Index Driver Fatigue Detection
Machine Vision Transportation Informatics Group University of Klagenfurt Alireza Fasih, 2009 3/10/2009 1 Address: L4.2.02, Lakeside Park, Haus B04, Ebene 2, Klagenfurt-Austria Index Driver Fatigue Detection
Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications
 Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications AASHTO GIS-T Symposium April 2012 Table Of Contents Connected Vehicle Program Goals Mapping Technology
Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications AASHTO GIS-T Symposium April 2012 Table Of Contents Connected Vehicle Program Goals Mapping Technology
Key-Words: - Neural Networks, Cerebellum, Cerebellar Model Articulation Controller (CMAC), Auto-pilot
, Auto-pilot") erebellum Based ar Auto-Pilot System B. HSIEH,.QUEK and A.WAHAB Intelligent Systems Laboratory, School of omputer Engineering Nanyang Technological University, Blk N4 #2A-32 Nanyang Avenue, Singapore 639798
erebellum Based ar Auto-Pilot System B. HSIEH,.QUEK and A.WAHAB Intelligent Systems Laboratory, School of omputer Engineering Nanyang Technological University, Blk N4 #2A-32 Nanyang Avenue, Singapore 639798
Global Image Sensor Market with Focus on Automotive CMOS Sensors: Industry Analysis & Outlook ( )
") Industry Research by Koncept Analytics Global Image Sensor Market with Focus on Automotive CMOS Sensors: Industry Analysis & Outlook ----------------------------------------- (2017-2021) October 2017 Global
Industry Research by Koncept Analytics Global Image Sensor Market with Focus on Automotive CMOS Sensors: Industry Analysis & Outlook ----------------------------------------- (2017-2021) October 2017 Global
Speed Traffic-Sign Recognition Algorithm for Real-Time Driving Assistant System
 R3-11 SASIMI 2013 Proceedings Speed Traffic-Sign Recognition Algorithm for Real-Time Driving Assistant System Masaharu Yamamoto 1), Anh-Tuan Hoang 2), Mutsumi Omori 2), Tetsushi Koide 1) 2). 1) Graduate
R3-11 SASIMI 2013 Proceedings Speed Traffic-Sign Recognition Algorithm for Real-Time Driving Assistant System Masaharu Yamamoto 1), Anh-Tuan Hoang 2), Mutsumi Omori 2), Tetsushi Koide 1) 2). 1) Graduate
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine)
") Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
Revision of the EU General Safety Regulation and Pedestrian Safety Regulation
 AC.nl Revision of the EU General Safety Regulation and Pedestrian Safety Regulation 11 September 2018 ETSC isafer Fitting safety as standard Directorate-General for Internal Market, Automotive and Mobility
AC.nl Revision of the EU General Safety Regulation and Pedestrian Safety Regulation 11 September 2018 ETSC isafer Fitting safety as standard Directorate-General for Internal Market, Automotive and Mobility
"This powerpoint presentation is property of David Abbink and Delft University of Technology. No part of this publication may be reproduced, stored
 "This powerpoint presentation is property of David Abbink and Delft University of Technology. No part of this publication may be reproduced, stored in other retrieval systems or transmitted in any form
"This powerpoint presentation is property of David Abbink and Delft University of Technology. No part of this publication may be reproduced, stored in other retrieval systems or transmitted in any form
A software video stabilization system for automotive oriented applications
 A software video stabilization system for automotive oriented applications A. Broggi, P. Grisleri Dipartimento di Ingegneria dellinformazione Universita degli studi di Parma 43100 Parma, Italy Email: {broggi,
A software video stabilization system for automotive oriented applications A. Broggi, P. Grisleri Dipartimento di Ingegneria dellinformazione Universita degli studi di Parma 43100 Parma, Italy Email: {broggi,
Night-time pedestrian detection via Neuromorphic approach
 Night-time pedestrian detection via Neuromorphic approach WOO JOON HAN, IL SONG HAN Graduate School for Green Transportation Korea Advanced Institute of Science and Technology 335 Gwahak-ro, Yuseong-gu,
Night-time pedestrian detection via Neuromorphic approach WOO JOON HAN, IL SONG HAN Graduate School for Green Transportation Korea Advanced Institute of Science and Technology 335 Gwahak-ro, Yuseong-gu,
Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System
 Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System By Dr. Kai Franke, Development Online Driver Assistance Systems, Volkswagen AG 10 Engineering Reality Magazine A
Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System By Dr. Kai Franke, Development Online Driver Assistance Systems, Volkswagen AG 10 Engineering Reality Magazine A
A Vehicular Visual Tracking System Incorporating Global Positioning System
 A Vehicular Visual Tracking System Incorporating Global Positioning System Hsien-Chou Liao and Yu-Shiang Wang Abstract Surveillance system is widely used in the traffic monitoring. The deployment of cameras
A Vehicular Visual Tracking System Incorporating Global Positioning System Hsien-Chou Liao and Yu-Shiang Wang Abstract Surveillance system is widely used in the traffic monitoring. The deployment of cameras
Design of intelligent vehicle control system based on machine visual
 Advances in Engineering Research (AER), volume 117 2nd Annual International Conference on Electronics, Electrical Engineering and Information Science (EEEIS 2016) Design of intelligent vehicle control
Advances in Engineering Research (AER), volume 117 2nd Annual International Conference on Electronics, Electrical Engineering and Information Science (EEEIS 2016) Design of intelligent vehicle control
Autonomous Vehicle Simulation (MDAS.ai)
") Autonomous Vehicle Simulation (MDAS.ai) Sridhar Lakshmanan Department of Electrical & Computer Engineering University of Michigan - Dearborn Presentation for Physical Systems Replication Panel NDIA Cyber-Enabled
Autonomous Vehicle Simulation (MDAS.ai) Sridhar Lakshmanan Department of Electrical & Computer Engineering University of Michigan - Dearborn Presentation for Physical Systems Replication Panel NDIA Cyber-Enabled
Driver status monitoring based on Neuromorphic visual processing
 Driver status monitoring based on Neuromorphic visual processing Dongwook Kim, Karam Hwang, Seungyoung Ahn, and Ilsong Han Cho Chun Shik Graduated School for Green Transportation Korea Advanced Institute
Driver status monitoring based on Neuromorphic visual processing Dongwook Kim, Karam Hwang, Seungyoung Ahn, and Ilsong Han Cho Chun Shik Graduated School for Green Transportation Korea Advanced Institute
A Vehicular Visual Tracking System Incorporating Global Positioning System
 Vol:5, :6, 20 A Vehicular Visual Tracking System Incorporating Global Positioning System Hsien-Chou Liao and Yu-Shiang Wang International Science Index, Computer and Information Engineering Vol:5, :6,
Vol:5, :6, 20 A Vehicular Visual Tracking System Incorporating Global Positioning System Hsien-Chou Liao and Yu-Shiang Wang International Science Index, Computer and Information Engineering Vol:5, :6,
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
FORESIGHT AUTONOMOUS HOLDINGS NASDAQ/TASE: FRSX. Investor Conference. December 2018
 FORESIGHT AUTONOMOUS HOLDINGS NASDAQ/TASE: FRSX Investor Conference December 2018 Forward-Looking Statement This presentation of Foresight Autonomous Holdings Ltd. (the Company ) contains forward-looking
FORESIGHT AUTONOMOUS HOLDINGS NASDAQ/TASE: FRSX Investor Conference December 2018 Forward-Looking Statement This presentation of Foresight Autonomous Holdings Ltd. (the Company ) contains forward-looking
MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE
 MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE First Annual 2018 National Mobility Summit of US DOT University Transportation Centers (UTC) April 12, 2018 Washington, DC Research Areas Cooperative
MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE First Annual 2018 National Mobility Summit of US DOT University Transportation Centers (UTC) April 12, 2018 Washington, DC Research Areas Cooperative
Adaptive Controllers for Vehicle Velocity Control for Microscopic Traffic Simulation Models
 Adaptive Controllers for Vehicle Velocity Control for Microscopic Traffic Simulation Models Yiannis Papelis, Omar Ahmad & Horatiu German National Advanced Driving Simulator, The University of Iowa, USA
Adaptive Controllers for Vehicle Velocity Control for Microscopic Traffic Simulation Models Yiannis Papelis, Omar Ahmad & Horatiu German National Advanced Driving Simulator, The University of Iowa, USA
EG 1 Millimeter-wave & Integrated Antennas
 EuCAP 2010 ARTIC Workshop 5-12 July, San Diego, California EG 1 Millimeter-wave & Integrated Antennas Ronan SAULEAU Ronan.Sauleau@univ-rennes1.fr IETR (Institute of Electronics and Telecommunications,
EuCAP 2010 ARTIC Workshop 5-12 July, San Diego, California EG 1 Millimeter-wave & Integrated Antennas Ronan SAULEAU Ronan.Sauleau@univ-rennes1.fr IETR (Institute of Electronics and Telecommunications,
Iowa Research Online. University of Iowa. Robert E. Llaneras Virginia Tech Transportation Institute, Blacksburg. Jul 11th, 12:00 AM
 University of Iowa Iowa Research Online Driving Assessment Conference 2007 Driving Assessment Conference Jul 11th, 12:00 AM Safety Related Misconceptions and Self-Reported BehavioralAdaptations Associated
University of Iowa Iowa Research Online Driving Assessment Conference 2007 Driving Assessment Conference Jul 11th, 12:00 AM Safety Related Misconceptions and Self-Reported BehavioralAdaptations Associated
Autonomous driving technology and ITS
 Autonomous driving technology and ITS 10 March 2016 Sophia Antipolis, France Takanori MASHIKO Deputy Director, New-Generation Mobile Communications Office, Radio Dept., Telecommunications Bureau, Ministry
Autonomous driving technology and ITS 10 March 2016 Sophia Antipolis, France Takanori MASHIKO Deputy Director, New-Generation Mobile Communications Office, Radio Dept., Telecommunications Bureau, Ministry
Head, Eye, and Hand Patterns for Driver Activity Recognition
 2014 22nd International Conference on Pattern Recognition Head, Eye, and Hand Patterns for Driver Activity Recognition Eshed Ohn-Bar, Sujitha Martin, Ashish Tawari, and Mohan Trivedi University of California
2014 22nd International Conference on Pattern Recognition Head, Eye, and Hand Patterns for Driver Activity Recognition Eshed Ohn-Bar, Sujitha Martin, Ashish Tawari, and Mohan Trivedi University of California
Perception platform and fusion modules results. Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event
 Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
An Information Fusion Method for Vehicle Positioning System
 An Information Fusion Method for Vehicle Positioning System Yi Yan, Che-Cheng Chang and Wun-Sheng Yao Abstract Vehicle positioning techniques have a broad application in advanced driver assistant system
An Information Fusion Method for Vehicle Positioning System Yi Yan, Che-Cheng Chang and Wun-Sheng Yao Abstract Vehicle positioning techniques have a broad application in advanced driver assistant system
Proposed Watertown Plan Road Interchange Evaluation Using Full Scale Driving Simulator
 0 0 0 0 Proposed Watertown Plan Road Interchange Evaluation Using Full Scale Driving Simulator Kelvin R. Santiago-Chaparro*, M.S., P.E. Assistant Researcher Traffic Operations and Safety (TOPS) Laboratory
0 0 0 0 Proposed Watertown Plan Road Interchange Evaluation Using Full Scale Driving Simulator Kelvin R. Santiago-Chaparro*, M.S., P.E. Assistant Researcher Traffic Operations and Safety (TOPS) Laboratory
Minimizing Distraction While Adding Features
 Minimizing Distraction While Adding Features Lisa Southwick, UX Manager Hyundai American Technical Center, Inc. Agenda Distracted Driving Advanced Driver Assistance Systems (ADAS) ADAS User Experience
Minimizing Distraction While Adding Features Lisa Southwick, UX Manager Hyundai American Technical Center, Inc. Agenda Distracted Driving Advanced Driver Assistance Systems (ADAS) ADAS User Experience
Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings. Amos Gellert, Nataly Kats
 Mr. Amos Gellert Technological aspects of level crossing facilities Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings Deputy General Manager
Mr. Amos Gellert Technological aspects of level crossing facilities Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings Deputy General Manager
Provide the operator a view of the areas around the vehicle that cannot be seen by the eyes while sitting in the seat.
 1. OBJECT OF EXTERIOR MIRRORS ON VEHICLES Provide the operator a view of the areas around the vehicle that cannot be seen by the eyes while sitting in the seat. The mirrors must provide a view of the proximity
1. OBJECT OF EXTERIOR MIRRORS ON VEHICLES Provide the operator a view of the areas around the vehicle that cannot be seen by the eyes while sitting in the seat. The mirrors must provide a view of the proximity
Driving Simulators for Commercial Truck Drivers - Humans in the Loop
 University of Iowa Iowa Research Online Driving Assessment Conference 2005 Driving Assessment Conference Jun 29th, 12:00 AM Driving Simulators for Commercial Truck Drivers - Humans in the Loop Talleah
University of Iowa Iowa Research Online Driving Assessment Conference 2005 Driving Assessment Conference Jun 29th, 12:00 AM Driving Simulators for Commercial Truck Drivers - Humans in the Loop Talleah
Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization
 Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Advances in Vehicle Periphery Sensing Techniques Aimed at Realizing Autonomous Driving
 FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Advances in Vehicle Periphery Sensing Techniques Aimed at Realizing Autonomous Driving Progress is being made on vehicle periphery sensing,
FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Advances in Vehicle Periphery Sensing Techniques Aimed at Realizing Autonomous Driving Progress is being made on vehicle periphery sensing,
High-Efficiency Device Localization in 5G Ultra-Dense Networks: Prospects and Enabling Technologies
 High-Efficiency Device Localization in 5G Ultra-Dense Networks: Prospects and Enabling Technologies Aki Hakkarainen*, Janis Werner*, Mário Costa, Kari Leppänen and Mikko Valkama* *Tampere University of
High-Efficiency Device Localization in 5G Ultra-Dense Networks: Prospects and Enabling Technologies Aki Hakkarainen*, Janis Werner*, Mário Costa, Kari Leppänen and Mikko Valkama* *Tampere University of
Assessments of Grade Crossing Warning and Signalization Devices Driving Simulator Study
 Assessments of Grade Crossing Warning and Signalization Devices Driving Simulator Study Petr Bouchner, Stanislav Novotný, Roman Piekník, Ondřej Sýkora Abstract Behavior of road users on railway crossings
Assessments of Grade Crossing Warning and Signalization Devices Driving Simulator Study Petr Bouchner, Stanislav Novotný, Roman Piekník, Ondřej Sýkora Abstract Behavior of road users on railway crossings