Can Artificial Intelligence pass the CPL(H) Skill Test?
|
|
|
- Ilene Whitehead
- 5 years ago
- Views:
Transcription

1 Flight control systems for the autonomous electric light personal-transport aircraft of the near future. Can Artificial Intelligence pass the CPL(H) Skill Test? ICAS Workshop Dr. Luuk van Dijk -- Anna Chernova The content of this presentation is proprietary information of Daedalean AG and is not to be used or reproduced in any way without prior written consent. Contact:

2
3 1 Why? 2 What? 3 How? 4 Yes? The content of this presentation is proprietary and confidential information of Daedalean AG and is not to be used or reproduced in any way without prior written consent.
4 1 Why? 2 What? 3 How? 4 Yes? The content of this presentation is proprietary and confidential information of Daedalean AG and is not to be used or reproduced in any way without prior written consent.
5










6


 \"Electrically operated")



7 "To fast-forward to the safest possible operational state for VTOL vehicles, network operators will be interested in the path that realizes full autonomy as quickly as possible." (source) "Electrically operated aerial vehicles combined with more autonomous operation and data-driven business models could herald the biggest change in aviation in decades." (source) "Pilotless planes are technically feasible, and could bring material benefits" (source)

8
9 1 Why? 2 What? 3 How? 4 Yes? The content of this presentation is proprietary and confidential information of Daedalean AG and is not to be used or reproduced in any way without prior written consent.

10 Every other startup idea since Collect BIG DATA Apply magic-ai-black-box Profit!
 The")


11 What is this AI you speak of? (depends on who you ask) The science and engineering to create machines (computer programs) that use understanding of the world to achieve goals.


12 A broad range of CS techniques Computer Vision Robotics Statistics on Big Data Machine Learning Deep neural networks Reinforcement Learning Adaptive (learn on the job) New algorithms are made possible by strides in computational capacity. =

13 Require the wrong things to be not there Require the right things to be there Build what you require

14 ...
15
16 Adaptive AI systems face 3 layers of challenges Sufficiently reliable hard- and software Regulatory capture Actually Solving The (Hard) Problems of Flying! Dealing with the unexpected
17 1 Why? 2 What? 3 How? 4 Yes? The content of this presentation is proprietary and confidential information of Daedalean AG and is not to be used or reproduced in any way without prior written consent.

18 Modern AI & the unexpected? Pool flight hours Copies of our systems can share their learnings Simulations Generate much more data than you could ever train a human on! Take 104 Hours of real data,. multiply by 108 scenarios... What if we created an autopilot with 1012 hours of PIC time in Day, Night, IFR...
19 The real art of flying I. II. III. IV. V. VI. VII. VIII. IX. X. Preflight preparation Preflight procedures Airport operations Hovering maneuvers Takeoffs, landings and go-arounds Performance maneuvers Navigation Emergency operations Special Operations Postflight procedures

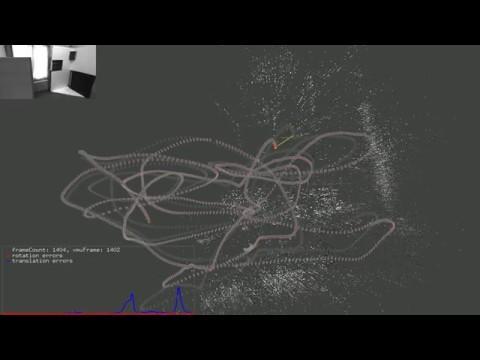
20 industry assessment of autonomy's current ability Source: recent report by NASA Autonomy Incubator
21 The real art of flying I. II. III. IV. V. VI. VII. VIII. IX. X. Preflight preparation Preflight procedures Airport operations Hovering maneuvers Takeoffs, landings and go-arounds Performance maneuvers Navigation Emergency operations Special Operations Postflight procedures
22 Reconnaissance for confined area landings High reconnaissance Wind direction and speed Find touchdown point Forced landing options Approach/departure axes Low reconnaissance Reconfirm earlier observations Wires, poles Surface conditions: dust, sand, snow, debris and obstacles Anything that is dangerous Slope Source: Helicopter Flying Handbook ch 10 Advanced Maneuvers
23
24 Reconnaissance for confined area landings High reconnaissance Wind direction and speed Find touchdown point Forced landing options Approach/departure axes Low reconnaissance Reconfirm earlier observations Wires, poles Surface conditions: dust, sand, snow, debris and obstacles Anything that is dangerous Slope Source: Helicopter Flying Handbook ch 10 Advanced Maneuvers
25 Reconnaissance for confined area landings High reconnaissance Wind direction and speed Find touchdown point Forced landing options Approach/departure axes Low reconnaissance Reconfirm earlier observations Wires, poles Surface conditions: dust, sand, snow, debris and obstacles Anything that is dangerous Slope Source: Helicopter Flying Handbook ch 10 Advanced Maneuvers
26 The real art of flying I. II. III. IV. V. VI. VII. VIII. IX. X. Preflight preparation Preflight procedures Airport operations Hovering maneuvers Takeoffs, landings and go-arounds Performance maneuvers Navigation Emergency operations Special Operations Postflight procedures
27 The real art of flying I. II. III. IV. V. VI. VII. VIII. IX. X. Preflight preparation Preflight procedures Airport operations Hovering maneuvers Takeoffs, landings and go-arounds Performance maneuvers Navigation Emergency operations Special Operations Postflight procedures

28
29 How to outperform the human The easy bits Permanent attention for everything Always a plan ready Look in all directions always Superior control over the airframe Should we pull the parachute? The harder bits Recognizing water, debris, snow Visual clues for the wind anything dangerous
30 1 Why? 2 What? 3 How? 4 Yes? The content of this presentation is proprietary and confidential information of Daedalean AG and is not to be used or reproduced in any way without prior written consent.

31 Engineering is the art of solving problems within constraints In the Aerospace sector we like to see those formulated as requirements

32 By humans, for humans

33

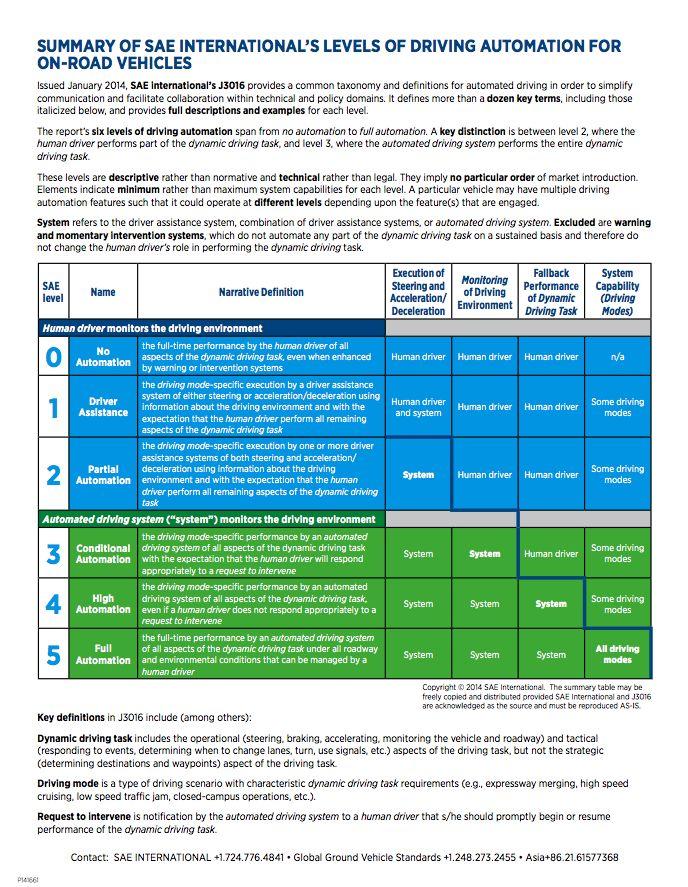
34 Dynamic driving task includes the operational (steering, braking, accelerating, monitoring the vehicle and roadway) and tactical (responding to events, determining when to change lanes, turn, use signals, etc.) aspects of the driving task, but not the strategic (determining destinations and waypoints) aspect of the driving task.
35 A modest proposal Define descriptive levels cf. the SAE for a comprehensive set of tasks Not necessarily the CPL(H) ones For each task, level define normative metrics that would constitute sufficient and convincing bars of compliance.. Profit!
36 1 Why? 2 What? 3 How? 4 Yes? The content of this presentation is proprietary and confidential information of Daedalean AG and is not to be used or reproduced in any way without prior written consent.
37
Stanford Center for AI Safety
 Stanford Center for AI Safety Clark Barrett, David L. Dill, Mykel J. Kochenderfer, Dorsa Sadigh 1 Introduction Software-based systems play important roles in many areas of modern life, including manufacturing,
Stanford Center for AI Safety Clark Barrett, David L. Dill, Mykel J. Kochenderfer, Dorsa Sadigh 1 Introduction Software-based systems play important roles in many areas of modern life, including manufacturing,
Accurate Automation Corporation. developing emerging technologies
 Accurate Automation Corporation developing emerging technologies Unmanned Systems for the Maritime Applications Accurate Automation Corporation (AAC) serves as a showcase for the Small Business Innovation
Accurate Automation Corporation developing emerging technologies Unmanned Systems for the Maritime Applications Accurate Automation Corporation (AAC) serves as a showcase for the Small Business Innovation
Aerospace Education 8 Study Guide
 Aerospace Education 8 Study Guide History of Rockets: 1. Everything associated with propelling the rocket 2. Whose laws of motion laid the scientific foundation for modern rocketry? 3. Who was the first
Aerospace Education 8 Study Guide History of Rockets: 1. Everything associated with propelling the rocket 2. Whose laws of motion laid the scientific foundation for modern rocketry? 3. Who was the first
Aerial Firefighting Europe SEILAF: Wildfirexperience
 Aerial Firefighting Europe 2013 SEILAF: Wildfirexperience Difficulties to gain Drills as an alternative Mission training in other fields of activity: i.e. Military, EMS, Oil&Gas industry Based on simulation
Aerial Firefighting Europe 2013 SEILAF: Wildfirexperience Difficulties to gain Drills as an alternative Mission training in other fields of activity: i.e. Military, EMS, Oil&Gas industry Based on simulation
Connected and Autonomous Technology Evaluation Center (CAVTEC) Overview. TennSMART Spring Meeting April 9 th, 2019
 Overview. TennSMART Spring Meeting April 9 th, 2019") Connected and Autonomous Technology Evaluation Center (CAVTEC) Overview TennSMART Spring Meeting April 9 th, 2019 Location Location Location Tennessee s Portal to Aerospace & Defense Technologies Mach
Connected and Autonomous Technology Evaluation Center (CAVTEC) Overview TennSMART Spring Meeting April 9 th, 2019 Location Location Location Tennessee s Portal to Aerospace & Defense Technologies Mach
Sikorsky S-70i BLACK HAWK Training
 Sikorsky S-70i BLACK HAWK Training Serving Government and Military Crewmembers Worldwide U.S. #15-S-0564 Updated 11/17 FlightSafety offers pilot and maintenance technician training for the complete line
Sikorsky S-70i BLACK HAWK Training Serving Government and Military Crewmembers Worldwide U.S. #15-S-0564 Updated 11/17 FlightSafety offers pilot and maintenance technician training for the complete line
Reinforcement Learning for CPS Safety Engineering. Sam Green, Çetin Kaya Koç, Jieliang Luo University of California, Santa Barbara
 Reinforcement Learning for CPS Safety Engineering Sam Green, Çetin Kaya Koç, Jieliang Luo University of California, Santa Barbara Motivations Safety-critical duties desired by CPS? Autonomous vehicle control:
Reinforcement Learning for CPS Safety Engineering Sam Green, Çetin Kaya Koç, Jieliang Luo University of California, Santa Barbara Motivations Safety-critical duties desired by CPS? Autonomous vehicle control:
A Reconfigurable Guidance System
 Lecture tes for the Class: Unmanned Aircraft Design, Modeling and Control A Reconfigurable Guidance System Application to Unmanned Aerial Vehicles (UAVs) y b right aileron: a2 right elevator: e 2 rudder:
Lecture tes for the Class: Unmanned Aircraft Design, Modeling and Control A Reconfigurable Guidance System Application to Unmanned Aerial Vehicles (UAVs) y b right aileron: a2 right elevator: e 2 rudder:
CS 730/830: Intro AI. Prof. Wheeler Ruml. TA Bence Cserna. Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1
 CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
How to Intercept a Radial Outbound
 How to Intercept a Radial Outbound by Greg Whiley Another practical publication from Aussie Star Flight Simulation How to intercepting a radial outbound 1 Greg Whiley Aussie Star Flight Simulation How
How to Intercept a Radial Outbound by Greg Whiley Another practical publication from Aussie Star Flight Simulation How to intercepting a radial outbound 1 Greg Whiley Aussie Star Flight Simulation How
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators. Roberto De Vecchi VI-grade Enrico Busto - AddFor
 ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
WE SPECIALIZE IN MILITARY PNT Research Education Engineering
 Defense-Focused Autonomy & Navigation Anywhere, Anytime, Using Anything WE SPECIALIZE IN MILITARY PNT Research Education Engineering RESEARCH THRUST 1 RESEARCH THRUST 2 RESEARCH THRUST 3 Autonomous & Cooperative
Defense-Focused Autonomy & Navigation Anywhere, Anytime, Using Anything WE SPECIALIZE IN MILITARY PNT Research Education Engineering RESEARCH THRUST 1 RESEARCH THRUST 2 RESEARCH THRUST 3 Autonomous & Cooperative
Heterogeneous Control of Small Size Unmanned Aerial Vehicles
 Magyar Kutatók 10. Nemzetközi Szimpóziuma 10 th International Symposium of Hungarian Researchers on Computational Intelligence and Informatics Heterogeneous Control of Small Size Unmanned Aerial Vehicles
Magyar Kutatók 10. Nemzetközi Szimpóziuma 10 th International Symposium of Hungarian Researchers on Computational Intelligence and Informatics Heterogeneous Control of Small Size Unmanned Aerial Vehicles
Agent. Pengju Ren. Institute of Artificial Intelligence and Robotics
 Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
Naturalistic Flying Study as a Method of Collecting Pilot Communication Behavior Data
 IEEE Cognitive Communications for Aerospace Applications Workshop 2017 Naturalistic Flying Study as a Method of Collecting Pilot Communication Behavior Data Chang-Geun Oh, Ph.D Kent State University Why
IEEE Cognitive Communications for Aerospace Applications Workshop 2017 Naturalistic Flying Study as a Method of Collecting Pilot Communication Behavior Data Chang-Geun Oh, Ph.D Kent State University Why
F-35 HELMET AND MILITARY TECHNOLOGIES PAPER WORK - INTERNET OF THINGS. GACHET Lénaïck QUEULAIN Jérémy. Academic year:
 F-35 HELMET AND MILITARY TECHNOLOGIES PAPER WORK - INTERNET OF THINGS Academic year: 2015 2016 GACHET Lénaïck QUEULAIN Jérémy Table of contents Introduction:... 2 I. F35-Helmet (smart aircraft helmet):...
F-35 HELMET AND MILITARY TECHNOLOGIES PAPER WORK - INTERNET OF THINGS Academic year: 2015 2016 GACHET Lénaïck QUEULAIN Jérémy Table of contents Introduction:... 2 I. F35-Helmet (smart aircraft helmet):...
Artificial Intelligence: Implications for Autonomous Weapons. Stuart Russell University of California, Berkeley
 Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline AI and autonomy State of the art Likely future developments Conclusions What is AI?
Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline AI and autonomy State of the art Likely future developments Conclusions What is AI?
Disruptive Aerospace Innovation Aeronautics and Space Engineering Board National Academy of Engineering
 Disruptive Aerospace Innovation Aeronautics and Space Engineering Board National Academy of Engineering John Tylko Chief Innovation Officer Aurora Flight Sciences October 10, 2018 How Does Aurora Disrupt
Disruptive Aerospace Innovation Aeronautics and Space Engineering Board National Academy of Engineering John Tylko Chief Innovation Officer Aurora Flight Sciences October 10, 2018 How Does Aurora Disrupt
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
CIS 849: Autonomous Robot Vision
 CIS 849: Autonomous Robot Vision Instructor: Christopher Rasmussen Course web page: www.cis.udel.edu/~cer/arv September 5, 2002 Purpose of this Course To provide an introduction to the uses of visual sensing
CIS 849: Autonomous Robot Vision Instructor: Christopher Rasmussen Course web page: www.cis.udel.edu/~cer/arv September 5, 2002 Purpose of this Course To provide an introduction to the uses of visual sensing
Development and Integration of Artificial Intelligence Technologies for Innovation Acceleration
 Development and Integration of Artificial Intelligence Technologies for Innovation Acceleration Research Supervisor: Minoru Etoh (Professor, Open and Transdisciplinary Research Initiatives, Osaka University)
Development and Integration of Artificial Intelligence Technologies for Innovation Acceleration Research Supervisor: Minoru Etoh (Professor, Open and Transdisciplinary Research Initiatives, Osaka University)
SENSORS SESSION. Operational GNSS Integrity. By Arne Rinnan, Nina Gundersen, Marit E. Sigmond, Jan K. Nilsen
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE 11-12 October, 2011 SENSORS SESSION By Arne Rinnan, Nina Gundersen, Marit E. Sigmond, Jan K. Nilsen Kongsberg Seatex AS Trondheim,
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE 11-12 October, 2011 SENSORS SESSION By Arne Rinnan, Nina Gundersen, Marit E. Sigmond, Jan K. Nilsen Kongsberg Seatex AS Trondheim,
GPS System Design and Control Modeling. Chua Shyan Jin, Ronald. Assoc. Prof Gerard Leng. Aeronautical Engineering Group, NUS
 GPS System Design and Control Modeling Chua Shyan Jin, Ronald Assoc. Prof Gerard Leng Aeronautical Engineering Group, NUS Abstract A GPS system for the autonomous navigation and surveillance of an airship
GPS System Design and Control Modeling Chua Shyan Jin, Ronald Assoc. Prof Gerard Leng Aeronautical Engineering Group, NUS Abstract A GPS system for the autonomous navigation and surveillance of an airship
Jager UAVs to Locate GPS Interference
 JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
Lecture Overview. c D. Poole and A. Mackworth 2017 Artificial Intelligence, Lecture 1.1, Page 1 1 / 15
 Lecture Overview What is Artificial Intelligence? Agents acting in an environment Learning objectives: at the end of the class, you should be able to describe what an intelligent agent is identify the
Lecture Overview What is Artificial Intelligence? Agents acting in an environment Learning objectives: at the end of the class, you should be able to describe what an intelligent agent is identify the
Training simulator of the operator Fighting vehicle ADMS «Strela-10»
 Training simulator of the operator Fighting vehicle ADMS «Strela-10» Purpose Teaching and training of operators of fighting vehicles FV 9К35 (9К34) ADMS «Strela-10» for the purpose of formation and fastening
Training simulator of the operator Fighting vehicle ADMS «Strela-10» Purpose Teaching and training of operators of fighting vehicles FV 9К35 (9К34) ADMS «Strela-10» for the purpose of formation and fastening
Department of State Notice of Inquiry: Request for Comments Regarding Review of United States Munitions List Categories V, X, and XI (RIN 1400-AE46)
") Department of State Notice of Inquiry: Request for Comments Regarding Review of United States Munitions List Categories V, X, and XI (RIN 1400-AE46) Comments of the Small UAV Coalition Request for Revision
Department of State Notice of Inquiry: Request for Comments Regarding Review of United States Munitions List Categories V, X, and XI (RIN 1400-AE46) Comments of the Small UAV Coalition Request for Revision
The next level of intelligence: Artificial Intelligence. Innovation Day USA 2017 Princeton, March 27, 2017 Michael May, Siemens Corporate Technology
 The next level of intelligence: Artificial Intelligence Innovation Day USA 2017 Princeton, March 27, 2017, Siemens Corporate Technology siemens.com/innovationusa Notes and forward-looking statements This
The next level of intelligence: Artificial Intelligence Innovation Day USA 2017 Princeton, March 27, 2017, Siemens Corporate Technology siemens.com/innovationusa Notes and forward-looking statements This
LECTURE 1: OVERVIEW. CS 4100: Foundations of AI. Instructor: Robert Platt. (some slides from Chris Amato, Magy Seif El-Nasr, and Stacy Marsella)
") LECTURE 1: OVERVIEW CS 4100: Foundations of AI Instructor: Robert Platt (some slides from Chris Amato, Magy Seif El-Nasr, and Stacy Marsella) SOME LOGISTICS Class webpage: http://www.ccs.neu.edu/home/rplatt/cs4100_spring2018/index.html
LECTURE 1: OVERVIEW CS 4100: Foundations of AI Instructor: Robert Platt (some slides from Chris Amato, Magy Seif El-Nasr, and Stacy Marsella) SOME LOGISTICS Class webpage: http://www.ccs.neu.edu/home/rplatt/cs4100_spring2018/index.html
Current Technologies in Vehicular Communications
 Current Technologies in Vehicular Communications George Dimitrakopoulos George Bravos Current Technologies in Vehicular Communications George Dimitrakopoulos Department of Informatics and Telematics Harokopio
Current Technologies in Vehicular Communications George Dimitrakopoulos George Bravos Current Technologies in Vehicular Communications George Dimitrakopoulos Department of Informatics and Telematics Harokopio
Commercializing Federal R&D: Secrets to Startup Success
 Commercializing Federal R&D: Secrets to Startup Success Janeya Griffin NASA s Armstrong Flight Research Center Kraettli L. Epperson Vigilant Aerospace Systems Agenda What is FlightHorizon? Vetting federal
Commercializing Federal R&D: Secrets to Startup Success Janeya Griffin NASA s Armstrong Flight Research Center Kraettli L. Epperson Vigilant Aerospace Systems Agenda What is FlightHorizon? Vetting federal
Recommendations for Intelligent Systems Development in Aerospace. Recommendations for Intelligent Systems Development in Aerospace
 Recommendations for Intelligent Systems Development in Aerospace An AIAA Opinion Paper December 2017 1 TABLE OF CONTENTS Statement of Attribution 3 Executive Summary 4 Introduction and Problem Statement
Recommendations for Intelligent Systems Development in Aerospace An AIAA Opinion Paper December 2017 1 TABLE OF CONTENTS Statement of Attribution 3 Executive Summary 4 Introduction and Problem Statement
Development of Hybrid Flight Simulator with Multi Degree-of-Freedom Robot
 Development of Hybrid Flight Simulator with Multi Degree-of-Freedom Robot Kakizaki Kohei, Nakajima Ryota, Tsukabe Naoki Department of Aerospace Engineering Department of Mechanical System Design Engineering
Development of Hybrid Flight Simulator with Multi Degree-of-Freedom Robot Kakizaki Kohei, Nakajima Ryota, Tsukabe Naoki Department of Aerospace Engineering Department of Mechanical System Design Engineering
Safe and Efficient Autonomous Navigation in the Presence of Humans at Control Level
 Safe and Efficient Autonomous Navigation in the Presence of Humans at Control Level Klaus Buchegger 1, George Todoran 1, and Markus Bader 1 Vienna University of Technology, Karlsplatz 13, Vienna 1040,
Safe and Efficient Autonomous Navigation in the Presence of Humans at Control Level Klaus Buchegger 1, George Todoran 1, and Markus Bader 1 Vienna University of Technology, Karlsplatz 13, Vienna 1040,
Overview of Requirements for Semi-Autonomous Flight in Miniature UAVs
 Overview of Requirements for Semi-Autonomous Flight in Miniature UAVs Kevin Pratt, Robin Murphy, Sam Stover, Institute for Safety Security Rescue Technology, Chandler Griffin, isensys {kpratt, murphy,
Overview of Requirements for Semi-Autonomous Flight in Miniature UAVs Kevin Pratt, Robin Murphy, Sam Stover, Institute for Safety Security Rescue Technology, Chandler Griffin, isensys {kpratt, murphy,
AI for Autonomous Ships Challenges in Design and Validation
 VTT TECHNICAL RESEARCH CENTRE OF FINLAND LTD AI for Autonomous Ships Challenges in Design and Validation ISSAV 2018 Eetu Heikkilä Autonomous ships - activities in VTT Autonomous ship systems Unmanned engine
VTT TECHNICAL RESEARCH CENTRE OF FINLAND LTD AI for Autonomous Ships Challenges in Design and Validation ISSAV 2018 Eetu Heikkilä Autonomous ships - activities in VTT Autonomous ship systems Unmanned engine
NavigAR. Assisted Vision for General Aviation Tim Steele, CEO
 NavigAR Assisted Vision for General Aviation Tim Steele, CEO The Genesis of NavigAR The Idea Private aircraft have a fatality rate 9X greater than driving an automobile. It is also true that a majority
NavigAR Assisted Vision for General Aviation Tim Steele, CEO The Genesis of NavigAR The Idea Private aircraft have a fatality rate 9X greater than driving an automobile. It is also true that a majority
Ecological Interface Design for the Flight Deck
 Ecological Interface Design for the Flight Deck The World beyond the Glass SAE Workshop, Tahoe, March 2006 René van Paassen, 1 Faculty Vermelding of Aerospace onderdeelengineering organisatie Control and
Ecological Interface Design for the Flight Deck The World beyond the Glass SAE Workshop, Tahoe, March 2006 René van Paassen, 1 Faculty Vermelding of Aerospace onderdeelengineering organisatie Control and
ACAS Xu UAS Detect and Avoid Solution
 ACAS Xu UAS Detect and Avoid Solution Wes Olson 8 December, 2016 Sponsor: Neal Suchy, TCAS Program Manager, AJM-233 DISTRIBUTION STATEMENT A. Approved for public release: distribution unlimited. Legal
ACAS Xu UAS Detect and Avoid Solution Wes Olson 8 December, 2016 Sponsor: Neal Suchy, TCAS Program Manager, AJM-233 DISTRIBUTION STATEMENT A. Approved for public release: distribution unlimited. Legal
CPE/CSC 580: Intelligent Agents
 CPE/CSC 580: Intelligent Agents Franz J. Kurfess Computer Science Department California Polytechnic State University San Luis Obispo, CA, U.S.A. 1 Course Overview Introduction Intelligent Agent, Multi-Agent
CPE/CSC 580: Intelligent Agents Franz J. Kurfess Computer Science Department California Polytechnic State University San Luis Obispo, CA, U.S.A. 1 Course Overview Introduction Intelligent Agent, Multi-Agent
NextGen Aviation Safety. Amy Pritchett Director, NASA Aviation Safety Program
 NextGen Aviation Safety Amy Pritchett Director, NASA Aviation Safety Program NowGen Started for Safety! System Complexity Has Increased As Safety Has Also Increased! So, When We Talk About NextGen Safety
NextGen Aviation Safety Amy Pritchett Director, NASA Aviation Safety Program NowGen Started for Safety! System Complexity Has Increased As Safety Has Also Increased! So, When We Talk About NextGen Safety
Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments
 Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments IMI Lab, Dept. of Computer Science University of North Carolina Charlotte Outline Problem and Context Basic RAMP Framework
Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments IMI Lab, Dept. of Computer Science University of North Carolina Charlotte Outline Problem and Context Basic RAMP Framework
Targeting a Safer World
 Targeting a Safer World INTRODUCTION Accipiter Radar is a global provider of high performance radar surveillance solutions built upon its patented Radar Intelligence Network (RIN) Platform Technology.
Targeting a Safer World INTRODUCTION Accipiter Radar is a global provider of high performance radar surveillance solutions built upon its patented Radar Intelligence Network (RIN) Platform Technology.
On January 14, 2004, the President announced a new space exploration vision for NASA
 Exploration Conference January 31, 2005 President s Vision for U.S. Space Exploration On January 14, 2004, the President announced a new space exploration vision for NASA Implement a sustained and affordable
Exploration Conference January 31, 2005 President s Vision for U.S. Space Exploration On January 14, 2004, the President announced a new space exploration vision for NASA Implement a sustained and affordable
Responsible AI & National AI Strategies
 Responsible AI & National AI Strategies European Union Commission Dr. Anand S. Rao Global Artificial Intelligence Lead Today s discussion 01 02 Opportunities in Artificial Intelligence Risks of Artificial
Responsible AI & National AI Strategies European Union Commission Dr. Anand S. Rao Global Artificial Intelligence Lead Today s discussion 01 02 Opportunities in Artificial Intelligence Risks of Artificial
A.I in Automotive? Why and When.
 A.I in Automotive? Why and When. AGENDA 01 02 03 04 Definitions A.I? A.I in automotive Now? Next big A.I breakthrough in Automotive 01 DEFINITIONS DEFINITIONS Artificial Intelligence Artificial Intelligence:
A.I in Automotive? Why and When. AGENDA 01 02 03 04 Definitions A.I? A.I in automotive Now? Next big A.I breakthrough in Automotive 01 DEFINITIONS DEFINITIONS Artificial Intelligence Artificial Intelligence:
ACHIEVING SEMI-AUTONOMOUS ROBOTIC BEHAVIORS USING THE SOAR COGNITIVE ARCHITECTURE
 2010 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM MODELING & SIMULATION, TESTING AND VALIDATION (MSTV) MINI-SYMPOSIUM AUGUST 17-19 DEARBORN, MICHIGAN ACHIEVING SEMI-AUTONOMOUS ROBOTIC
2010 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM MODELING & SIMULATION, TESTING AND VALIDATION (MSTV) MINI-SYMPOSIUM AUGUST 17-19 DEARBORN, MICHIGAN ACHIEVING SEMI-AUTONOMOUS ROBOTIC
Simulationbased Development of ADAS and Automated Driving with the Help of Machine Learning
 Simulationbased Development of ADAS and Automated Driving with the Help of Machine Learning Dr. Andreas Kuhn A N D A T A München, 2017-06-27 2 Fields of Competence Artificial Intelligence Data Mining Big
Simulationbased Development of ADAS and Automated Driving with the Help of Machine Learning Dr. Andreas Kuhn A N D A T A München, 2017-06-27 2 Fields of Competence Artificial Intelligence Data Mining Big
AIRCRAFT CONTROL AND SIMULATION
 AIRCRAFT CONTROL AND SIMULATION AIRCRAFT CONTROL AND SIMULATION Third Edition Dynamics, Controls Design, and Autonomous Systems BRIAN L. STEVENS FRANK L. LEWIS ERIC N. JOHNSON Cover image: Space Shuttle
AIRCRAFT CONTROL AND SIMULATION AIRCRAFT CONTROL AND SIMULATION Third Edition Dynamics, Controls Design, and Autonomous Systems BRIAN L. STEVENS FRANK L. LEWIS ERIC N. JOHNSON Cover image: Space Shuttle
ACCELERATING TECHNOLOGY VISION FOR AEROSPACE AND DEFENSE 2017
 ACCELERATING TECHNOLOGY VISION FOR AEROSPACE AND DEFENSE 2017 TECHNOLOGY VISION FOR AEROSPACE AND DEFENSE 2017: THROUGH DIGITAL TURBULENCE A powerful combination of market trends, technology developments
ACCELERATING TECHNOLOGY VISION FOR AEROSPACE AND DEFENSE 2017 TECHNOLOGY VISION FOR AEROSPACE AND DEFENSE 2017: THROUGH DIGITAL TURBULENCE A powerful combination of market trends, technology developments
Artificial Intelligence: Implications for Autonomous Weapons. Stuart Russell University of California, Berkeley
 Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline Remit [etc] AI in the context of autonomous weapons State of the Art Likely future
Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline Remit [etc] AI in the context of autonomous weapons State of the Art Likely future
Farnborough Airshow Farnborough Air Show Investor Relations Technology Seminar 2018 Rolls-Royce
 2018 Farnborough Airshow Paul Stein Chief Technology Officer Pioneering the power that matters 19,400 engineers across the business Global presence in 50 countries Support a Global network 31 University
2018 Farnborough Airshow Paul Stein Chief Technology Officer Pioneering the power that matters 19,400 engineers across the business Global presence in 50 countries Support a Global network 31 University
Space Biology RESEARCH FOR HUMAN EXPLORATION
 Space Biology RESEARCH FOR HUMAN EXPLORATION TRISH Artificial Intelligence Workshop California Institute of Technology, Pasadena July 31, 2018 Elizabeth Keller, Space Biology Science Manager 1 Content
Space Biology RESEARCH FOR HUMAN EXPLORATION TRISH Artificial Intelligence Workshop California Institute of Technology, Pasadena July 31, 2018 Elizabeth Keller, Space Biology Science Manager 1 Content
New Export Requirements for Emerging and Foundational Technologies
 NEWS New Export Requirements for Emerging and Foundational Technologies 12.09.2018 The U.S. is adopting a major change in the export control laws. Under the recently enacted Export Control Reform Act of
NEWS New Export Requirements for Emerging and Foundational Technologies 12.09.2018 The U.S. is adopting a major change in the export control laws. Under the recently enacted Export Control Reform Act of
GPS-based Position Control and Waypoint Navigation System for Quadrocopters
 The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA GPS-based Position Control and Waypoint Navigation System for Quadrocopters T. Puls, M. Kemper,
The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA GPS-based Position Control and Waypoint Navigation System for Quadrocopters T. Puls, M. Kemper,
Navigating the AI Adoption Minefield Pitfalls, best practices, and developing your own AI roadmap April 11
 Navigating the AI Adoption Minefield Pitfalls, best practices, and developing your own AI roadmap April 11 Presenter: Cosmin Laslau, Director of Research Products, Lux Research Agenda 1 2 3 Why you yes,
Navigating the AI Adoption Minefield Pitfalls, best practices, and developing your own AI roadmap April 11 Presenter: Cosmin Laslau, Director of Research Products, Lux Research Agenda 1 2 3 Why you yes,
Development of an Autonomous Aerial Reconnaissance System
 Development of an Autonomous Aerial Reconnaissance System Jessica Dooley, Ekaterina Taralova, Prasad Gabbur, Timothy Spriggs University of Arizona Tucson, AZ ABSTRACT In preparation for the 2003 International
Development of an Autonomous Aerial Reconnaissance System Jessica Dooley, Ekaterina Taralova, Prasad Gabbur, Timothy Spriggs University of Arizona Tucson, AZ ABSTRACT In preparation for the 2003 International
The robotics rescue challenge for a team of robots
 The robotics rescue challenge for a team of robots Arnoud Visser Trends and issues in multi-robot exploration and robot networks workshop, Eu-Robotics Forum, Lyon, March 20, 2013 Universiteit van Amsterdam
The robotics rescue challenge for a team of robots Arnoud Visser Trends and issues in multi-robot exploration and robot networks workshop, Eu-Robotics Forum, Lyon, March 20, 2013 Universiteit van Amsterdam
Game Artificial Intelligence ( CS 4731/7632 )
") Game Artificial Intelligence ( CS 4731/7632 ) Instructor: Stephen Lee-Urban http://www.cc.gatech.edu/~surban6/2018-gameai/ (soon) Piazza T-square What s this all about? Industry standard approaches to
Game Artificial Intelligence ( CS 4731/7632 ) Instructor: Stephen Lee-Urban http://www.cc.gatech.edu/~surban6/2018-gameai/ (soon) Piazza T-square What s this all about? Industry standard approaches to
5 th Grade Powers of 10. Part I. What are powers of 10?
 5 th Grade Powers of 10 Part I. What are powers of 10? 1 1 1 1 1, 10, 100, 1000, 10000, etc. are all powers of 10. The fractions,,,, etc. are 10 100 1000 10000 also considered powers of 10. In decimal
5 th Grade Powers of 10 Part I. What are powers of 10? 1 1 1 1 1, 10, 100, 1000, 10000, etc. are all powers of 10. The fractions,,,, etc. are 10 100 1000 10000 also considered powers of 10. In decimal
Integrated Safety Envelopes
 Integrated Safety Envelopes Built-in Restrictions of Navigable Airspace Edward A. Lee Professor, EECS, UC Berkeley NSF / OSTP Workshop on Information Technology Research for Critical Infrastructure Protection
Integrated Safety Envelopes Built-in Restrictions of Navigable Airspace Edward A. Lee Professor, EECS, UC Berkeley NSF / OSTP Workshop on Information Technology Research for Critical Infrastructure Protection
What we are expecting from this presentation:
 What we are expecting from this presentation: A We want to inform you on the most important highlights from this topic D We exhort you to share with us a constructive feedback for further improvements
What we are expecting from this presentation: A We want to inform you on the most important highlights from this topic D We exhort you to share with us a constructive feedback for further improvements
Mobile Robots (Wheeled) (Take class notes)
 (Take class notes)") Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
An Approach to Fully Automatic Aircraft Collision Avoidance and Navigation
 7th WSEAS International Conference on APPLIED COMPUTER SCIENCE, Venice, Italy, November 21-23, 2007 259 An Approach to Fully Automatic Aircraft Collision Avoidance and Navigation SANTIAGO ÁLVAREZ DE TOLEDO,
7th WSEAS International Conference on APPLIED COMPUTER SCIENCE, Venice, Italy, November 21-23, 2007 259 An Approach to Fully Automatic Aircraft Collision Avoidance and Navigation SANTIAGO ÁLVAREZ DE TOLEDO,
Definition, Effects and Nature of Distracted Driving Worksheet 9.1
 Definition, Effects and Nature of Distracted Driving Worksheet 9.1 Am I Distracted? Self-Assessment Quiz Take this quiz from the National Road Safety Foundation to determine if you or someone you know
Definition, Effects and Nature of Distracted Driving Worksheet 9.1 Am I Distracted? Self-Assessment Quiz Take this quiz from the National Road Safety Foundation to determine if you or someone you know
Table of Contents. Page #'s Title Name Department Controlling Robots in Cluttered Environments Marc Killpack Mechanical Engineering
 Table of Contents Page #'s Title Name Department 2-12 Controlling Robots in Cluttered Environments Marc Killpack Mechanical Engineering 13-21 Multidisciplinary Design Optimization of Aircraft and Wind
Table of Contents Page #'s Title Name Department 2-12 Controlling Robots in Cluttered Environments Marc Killpack Mechanical Engineering 13-21 Multidisciplinary Design Optimization of Aircraft and Wind
CS6700: The Emergence of Intelligent Machines. Prof. Carla Gomes Prof. Bart Selman Cornell University
 EMERGENCE OF INTELLIGENT MACHINES: CHALLENGES AND OPPORTUNITIES CS6700: The Emergence of Intelligent Machines Prof. Carla Gomes Prof. Bart Selman Cornell University Artificial Intelligence After a distinguished
EMERGENCE OF INTELLIGENT MACHINES: CHALLENGES AND OPPORTUNITIES CS6700: The Emergence of Intelligent Machines Prof. Carla Gomes Prof. Bart Selman Cornell University Artificial Intelligence After a distinguished
ClearVision Complete HUD and EFVS Solution
 ClearVision Complete HUD and EFVS Solution SVS, EVS & CVS Options Overhead-Mounted or Wearable HUD Forward-Fit & Retrofit Solution for Fixed Wing Aircraft EFVS for Touchdown and Roll-out Enhanced Vision
ClearVision Complete HUD and EFVS Solution SVS, EVS & CVS Options Overhead-Mounted or Wearable HUD Forward-Fit & Retrofit Solution for Fixed Wing Aircraft EFVS for Touchdown and Roll-out Enhanced Vision
VSI Labs The Build Up of Automated Driving
 VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
International Perspectives on Rendezvous and Proximity Operations in Space and Space Sustainability
 International Perspectives on Rendezvous and Proximity Operations in Space and Space Sustainability Brian Weeden Technical Advisor Secure World Foundation Rendezvous and Proximity Operations (RPO) RPO
International Perspectives on Rendezvous and Proximity Operations in Space and Space Sustainability Brian Weeden Technical Advisor Secure World Foundation Rendezvous and Proximity Operations (RPO) RPO
OughtToPilot. Project Report of Submission PC128 to 2008 Propeller Design Contest. Jason Edelberg
 OughtToPilot Project Report of Submission PC128 to 2008 Propeller Design Contest Jason Edelberg Table of Contents Project Number.. 3 Project Description.. 4 Schematic 5 Source Code. Attached Separately
OughtToPilot Project Report of Submission PC128 to 2008 Propeller Design Contest Jason Edelberg Table of Contents Project Number.. 3 Project Description.. 4 Schematic 5 Source Code. Attached Separately
Ninth Annual SLIIT. Robotic Competition. Open UAV Race Competition Technical Specification. Organized By
 Ninth Annual SLIIT Robotic Competition Open UAV Race Competition Technical Specification Organized By Department of Electrical and Computer Engineering Faculty of Engineering Sri Lanka Institute of Information
Ninth Annual SLIIT Robotic Competition Open UAV Race Competition Technical Specification Organized By Department of Electrical and Computer Engineering Faculty of Engineering Sri Lanka Institute of Information
The Army s Future Tactical UAS Technology Demonstrator Program
 The Army s Future Tactical UAS Technology Demonstrator Program This information product has been reviewed and approved for public release, distribution A (Unlimited). Review completed by the AMRDEC Public
The Army s Future Tactical UAS Technology Demonstrator Program This information product has been reviewed and approved for public release, distribution A (Unlimited). Review completed by the AMRDEC Public
Cockpit GPS Quick Start Guide
 Cockpit GPS Quick Start Guide Introduction My online book, Cockpit GPS, has grown to over 250 pages. I have that much information because at one time or another I thought that each piece would be useful
Cockpit GPS Quick Start Guide Introduction My online book, Cockpit GPS, has grown to over 250 pages. I have that much information because at one time or another I thought that each piece would be useful
Swiss Re Institute. September 2018 Dr. Jeffrey R. Bohn
 Swiss Re Institute September 2018 Dr. Jeffrey R. Bohn Welcome & Introduction to the Swiss Re Institute 2 Global presence US infrastructure SRI Symposia sigma Monte Carlo launch Insurance market report
Swiss Re Institute September 2018 Dr. Jeffrey R. Bohn Welcome & Introduction to the Swiss Re Institute 2 Global presence US infrastructure SRI Symposia sigma Monte Carlo launch Insurance market report
Robotics in Oil and Gas. Matt Ondler President / CEO
 Robotics in Oil and Gas Matt Ondler President / CEO 1 Agenda Quick background on HMI State of robotics Sampling of robotics projects in O&G Example of a transformative robotic application Future of robotics
Robotics in Oil and Gas Matt Ondler President / CEO 1 Agenda Quick background on HMI State of robotics Sampling of robotics projects in O&G Example of a transformative robotic application Future of robotics
Author s Name Name of the Paper Session. DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION. Sensing Autonomy.
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION Sensing Autonomy By Arne Rinnan Kongsberg Seatex AS Abstract A certain level of autonomy is already
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION Sensing Autonomy By Arne Rinnan Kongsberg Seatex AS Abstract A certain level of autonomy is already
FAR Part 150 Noise Compatibility Study Contents
 FAR Part 150 Noise Compatibility Study Contents Contents Illustrations Tables Appendices Contents Noise Compatibility Program Checklist Noise Exposure Map Checklist i vi viii ix x xv Chapter A INVENTORY
FAR Part 150 Noise Compatibility Study Contents Contents Illustrations Tables Appendices Contents Noise Compatibility Program Checklist Noise Exposure Map Checklist i vi viii ix x xv Chapter A INVENTORY
ARKBIRD-Tiny Product Features:
 ARKBIRD-Tiny Product Features: ARKBIRD System is a high-accuracy autopilot designed for fixed-wing, which has capability of auto-balancing to ease the manipulation while flying. 1. Function all in one
ARKBIRD-Tiny Product Features: ARKBIRD System is a high-accuracy autopilot designed for fixed-wing, which has capability of auto-balancing to ease the manipulation while flying. 1. Function all in one
Performance evaluation and benchmarking in EU-funded activities. ICRA May 2011
 Performance evaluation and benchmarking in EU-funded activities ICRA 2011 13 May 2011 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Performance evaluation and benchmarking in EU-funded activities ICRA 2011 13 May 2011 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE
 MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE First Annual 2018 National Mobility Summit of US DOT University Transportation Centers (UTC) April 12, 2018 Washington, DC Research Areas Cooperative
MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE First Annual 2018 National Mobility Summit of US DOT University Transportation Centers (UTC) April 12, 2018 Washington, DC Research Areas Cooperative
On Emerging Technologies
 On Emerging Technologies 9.11. 2018. Prof. David Hyunchul Shim Director, Korea Civil RPAS Research Center KAIST, Republic of Korea hcshim@kaist.ac.kr 1 I. Overview Recent emerging technologies in civil
On Emerging Technologies 9.11. 2018. Prof. David Hyunchul Shim Director, Korea Civil RPAS Research Center KAIST, Republic of Korea hcshim@kaist.ac.kr 1 I. Overview Recent emerging technologies in civil
SMART DUBAI INSPIRING NEW REALITIES
 SMART DUBAI INSPIRING NEW REALITIES SMART DUBAI 2014-2017 2016 2013 Smart Government Smart Dubai & board formation 2000 E-Gov 2014 Smart Dubai Initiative 2021 Smart Dubai 2021 Smart Dubai is transforming
SMART DUBAI INSPIRING NEW REALITIES SMART DUBAI 2014-2017 2016 2013 Smart Government Smart Dubai & board formation 2000 E-Gov 2014 Smart Dubai Initiative 2021 Smart Dubai 2021 Smart Dubai is transforming
IPRO 312: Unmanned Aerial Systems
 IPRO 312: Unmanned Aerial Systems Kay, Vlad, Akshay, Chris, Andrew, Sebastian, Anurag, Ani, Ivo, Roger Dr. Vural Diverse IPRO Group ECE MMAE BME ARCH CS Outline Background Approach Team Research Integration
IPRO 312: Unmanned Aerial Systems Kay, Vlad, Akshay, Chris, Andrew, Sebastian, Anurag, Ani, Ivo, Roger Dr. Vural Diverse IPRO Group ECE MMAE BME ARCH CS Outline Background Approach Team Research Integration
Distributed Collaborative Path Planning in Sensor Networks with Multiple Mobile Sensor Nodes
 7th Mediterranean Conference on Control & Automation Makedonia Palace, Thessaloniki, Greece June 4-6, 009 Distributed Collaborative Path Planning in Sensor Networks with Multiple Mobile Sensor Nodes Theofanis
7th Mediterranean Conference on Control & Automation Makedonia Palace, Thessaloniki, Greece June 4-6, 009 Distributed Collaborative Path Planning in Sensor Networks with Multiple Mobile Sensor Nodes Theofanis
Horizon 2020 ICT Robotics Work Programme (draft - Publication: 20 October 2015)
") NCP TRAINING BRUSSELS 07 OCTOBER 2015 1 Horizon 2020 ICT Robotics Work Programme 2016 2017 (draft - Publication: 20 October 2015) Cécile Huet Deputy Head of Unit Robotics Directorate General for Communication
NCP TRAINING BRUSSELS 07 OCTOBER 2015 1 Horizon 2020 ICT Robotics Work Programme 2016 2017 (draft - Publication: 20 October 2015) Cécile Huet Deputy Head of Unit Robotics Directorate General for Communication
Collaboration between Canada and Japan -Innovation that changes the world- Takuji Sakai, Executive Director, JETRO Toronto
 Collaboration between Canada and Japan -Innovation that changes the world- Takuji Sakai, Executive Director, JETRO Toronto Major trade partners for Canada in 2017 (Photo: Cabinet Public Relations Office)
Collaboration between Canada and Japan -Innovation that changes the world- Takuji Sakai, Executive Director, JETRO Toronto Major trade partners for Canada in 2017 (Photo: Cabinet Public Relations Office)
Driver Education Classroom and In-Car Curriculum Unit 3 Space Management System
 Driver Education Classroom and In-Car Curriculum Unit 3 Space Management System Driver Education Classroom and In-Car Instruction Unit 3-2 Unit Introduction Unit 3 will introduce operator procedural and
Driver Education Classroom and In-Car Curriculum Unit 3 Space Management System Driver Education Classroom and In-Car Instruction Unit 3-2 Unit Introduction Unit 3 will introduce operator procedural and
Airbus Autonomy Roadmap
 Airbus Autonomy Roadmap ERTS 2 2018 Embedded Real Time Software and Systems Toulouse January 31 February 2, 2018 Pascal Traverse, General Manager for the Autonomy Thrust Airbus Corporate Technology Office
Airbus Autonomy Roadmap ERTS 2 2018 Embedded Real Time Software and Systems Toulouse January 31 February 2, 2018 Pascal Traverse, General Manager for the Autonomy Thrust Airbus Corporate Technology Office
How do you teach AI the value of trust?
 How do you teach AI the value of trust? AI is different from traditional IT systems and brings with it a new set of opportunities and risks. To build trust in AI organizations will need to go beyond monitoring
How do you teach AI the value of trust? AI is different from traditional IT systems and brings with it a new set of opportunities and risks. To build trust in AI organizations will need to go beyond monitoring
2016 IROC-A Challenge Descriptions
 2016 IROC-A Challenge Descriptions The Marine Corps Warfighter Lab (MCWL) is pursuing the Intuitive Robotic Operator Control (IROC) initiative in order to reduce the cognitive burden on operators when
2016 IROC-A Challenge Descriptions The Marine Corps Warfighter Lab (MCWL) is pursuing the Intuitive Robotic Operator Control (IROC) initiative in order to reduce the cognitive burden on operators when
Visual motion control in flies and fly-sized robots
 Visual motion control in flies and fly-sized robots Sawyer B. Fuller Harvard University School of Engineering and Applied Sciences 60 Oxford St. Rm 407, Cambridge, MA 02138 October 4, 2013 This demo session
Visual motion control in flies and fly-sized robots Sawyer B. Fuller Harvard University School of Engineering and Applied Sciences 60 Oxford St. Rm 407, Cambridge, MA 02138 October 4, 2013 This demo session
Prof. Sameer Singh CS 175: PROJECTS IN AI (IN MINECRAFT) WINTER April 6, 2017
 WINTER April 6, 2017") Prof. Sameer Singh CS 175: PROJECTS IN AI (IN MINECRAFT) WINTER 2017 April 6, 2017 Upcoming Misc. Check out course webpage and schedule Check out Canvas, especially for deadlines Do the survey by tomorrow,
Prof. Sameer Singh CS 175: PROJECTS IN AI (IN MINECRAFT) WINTER 2017 April 6, 2017 Upcoming Misc. Check out course webpage and schedule Check out Canvas, especially for deadlines Do the survey by tomorrow,
Automating the math makes analytics more democratic and more human
 Automating the math makes analytics more democratic and more human Operations September 2015 Markus Hammer Christian Johnson Olivier Noterdaeme Christoph Schmitz Automating the math makes analytics more
Automating the math makes analytics more democratic and more human Operations September 2015 Markus Hammer Christian Johnson Olivier Noterdaeme Christoph Schmitz Automating the math makes analytics more
Future Directions: Strategy for Human and Robotic Exploration. Gary L. Martin Space Architect
 Future Directions: Strategy for Human and Robotic Exploration Gary L. Martin Space Architect September, 2003 Robust Exploration Strategy Traditional Approach: A Giant Leap (Apollo) Cold War competition
Future Directions: Strategy for Human and Robotic Exploration Gary L. Martin Space Architect September, 2003 Robust Exploration Strategy Traditional Approach: A Giant Leap (Apollo) Cold War competition
CS343 Introduction to Artificial Intelligence Spring 2010
 CS343 Introduction to Artificial Intelligence Spring 2010 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
CS343 Introduction to Artificial Intelligence Spring 2010 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
Verifiable Autonomy. Michael Fisher. University of Liverpool, 11th September 2015
 Verifiable Autonomy Michael Fisher University of Liverpool, 11th September 2015 Motivation: Autonomy Everywhere! rtc.nagoya.riken.jp/ri-man www.volvo.com Motivation: Autonomous Systems Architectures Many
Verifiable Autonomy Michael Fisher University of Liverpool, 11th September 2015 Motivation: Autonomy Everywhere! rtc.nagoya.riken.jp/ri-man www.volvo.com Motivation: Autonomous Systems Architectures Many
SEPTEMBER, 2018 PREDICTIVE MAINTENANCE SOLUTIONS
 SEPTEMBER, 2018 PES: Welcome back to PES Wind magazine. It s great to talk with you again. For the benefit of our new readerswould you like to begin by explaining a little about the background of SkySpecs
SEPTEMBER, 2018 PES: Welcome back to PES Wind magazine. It s great to talk with you again. For the benefit of our new readerswould you like to begin by explaining a little about the background of SkySpecs
Artificial Intelligence for Social Impact. February 8, 2018 Dr. Cara LaPointe Senior Fellow Georgetown University
 Artificial Intelligence for Social Impact February 8, 2018 Dr. Cara LaPointe Senior Fellow Georgetown University What is Artificial Intelligence? 2 Artificial Intelligence: A Working Definition The capability
Artificial Intelligence for Social Impact February 8, 2018 Dr. Cara LaPointe Senior Fellow Georgetown University What is Artificial Intelligence? 2 Artificial Intelligence: A Working Definition The capability
What Works Cities Brief: The City Hall Data Gap
 What Works Cities Brief: The City Hall Data Gap Yes, Using Data Can Help Cities Drive Change But Cities Need Help To Overcome the Hurdles Executive Summary Unlocking the potential of data and evidence
What Works Cities Brief: The City Hall Data Gap Yes, Using Data Can Help Cities Drive Change But Cities Need Help To Overcome the Hurdles Executive Summary Unlocking the potential of data and evidence