Ecological Interface Design for the Flight Deck
|
|
|
- Kelly Butler
- 5 years ago
- Views:
Transcription

1 Ecological Interface Design for the Flight Deck The World beyond the Glass SAE Workshop, Tahoe, March 2006 René van Paassen, 1 Faculty Vermelding of Aerospace onderdeelengineering organisatie Control and Simulation
2 Topics I hope to cover Short Introduction to Control and Simulation, Aerospace Engineering, TUDelft Aspects in Flight Deck Interface Design Cognitive Systems Engineering/ Ecological Interface Design Work Domain Analysis Some Examples Closed loops and the match to flight skills Conclusions 2
3 Control and Simulation AE - TUDelft Human-Machine Systems modeling Guidance, Control and Navigation simulation integration (avionics) laboratory aircraft human-machine systems laboratory facilities flight simulator UAV helicopter 3
4 people in the HMS cluster prof. dr Bob Mulder dr ir René van Paassen dr ir Max Mulder ir Xander in t Veld division head associate professor associate professor division test pilot PhD candidate noise abatement procedures ir ir ir ir ir ir ir ir PhD candidate PhD candidate PhD candidate PhD candidate PhD candidate PhD candidate PhD candidate PhD candidate Frizo Vormer Clark Borst Matthijs Amelink Mung Lam Stijn van Dam Joost de Winter Herman Damveld Peter Zaal flexible arrival management CSE/EID for TAWS/SVS CSE of UAV UAV haptic interface CSE/EID for VTM Virtual driving assistant H-Q of flexible aircraft Simulator fidelity Approximately 25 MSc graduate students each year 4
5 active knowledge base m a n u a l perception & psychophysics cybernetics artificial intelligence cognitive systems engineering ecological interface design s u p e r v i s o r y 5
6 The Flight Deck is: An open system (Vicente) extensive and complex interaction with the environment The airborne office A workplace for cognitive (team)work 6

7 Levels in Interface Design Illumination, readability, colors, symbols Integrated displays, configural displays, emergent features, principle of moving part? Support for cognitive work ->Cognitive Systems Engineering 7

 tasks?")
8 Is there a display format that helps pilots with their (cognitive) tasks? 8

9 Human Capabilities Direct Perception Gibson affording perception-action coupling specifying 9
10 Joint Cognitive Systems Aircraft + crew = system with cognitive tasks Joint cognition who does what (Fitts' list) rather: cognitive transparency Display supports cognition: Ecological Interface Design -> Cognitive Systems Engineering 10
11 Ecological Interface Design Basic idea + name: enable Gibson direct perception Elaboration: Work Domain Analysis Abstraction Hierarchy Control task analysis Decision Ladders Strategies, Social Organization, Worker capacity The design 11
12 Work Domain Analysis Map the terrain of a specific work situation Identify the constraints 12
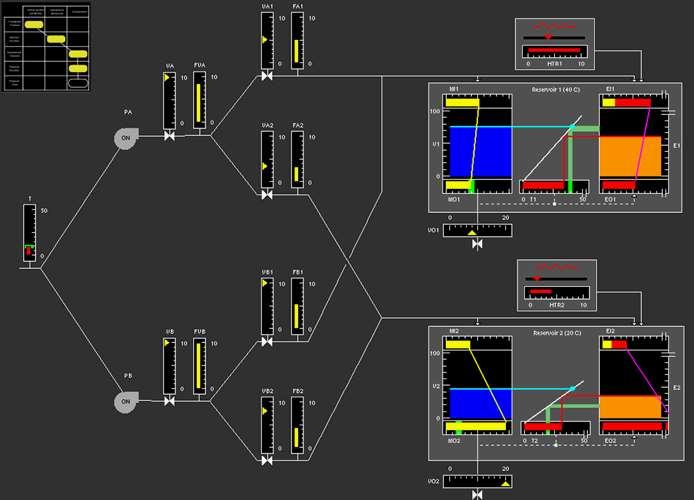
13 EID Archetype DURESS Double feedwater system Laboratory task 13
14 Abstraction hierarchy functional purpose abstract function picture AH/Bisantz generalized function physical function physical form 14
15 15
 funnel: level trend temperature goal flow goal outflow")
16 heater control heating system mass flow energy flow water energy flow heater storage (reservoirs) funnel: level trend temperature goal flow goal outflow valve 16
17 Driving, Flying, Sailing, vs. Process plants Extension of natural ecological perception Transport is the issue Interaction complex environment Control Build new ecology Transported stuff is (nearly) anonymous Limited (known) number of variables Functionality creation and selection 17
18 Additional The intentional domain issues, are man-made laws+conventions different from the physical ones? Difference in nature of disturbances, probability models. 18
19 Can we get classical EID in an aircraft (car, ship) Already have Ecological Perception -> Enhance, not substitute Time scale is different -> not always opportunity to visually explore an interface Controls are not co-located with the interface Interaction is already multi-modal -> process control EID could learn from us there We cannot measure everything in the outside world -> rely on humans to read signs etc. 19
20 Ecological Support Interface Design Analyze work domain (AH) Analyze control tasks (cybernetics) Identify what affordances are not sufficiently specified Enhance 20
21 Example problem: Avoiding aircraft 21
22 History of approaches ASAS, pasas, various support tools Modified Voltage Potential NLR, Eurocontrol, FAA, others 22
23 ASAS (NLR) Calculation CPA CPA < look-ahead time AND distance < CPA dist = conflict 23
24 Problems Conflict location moves when maneuvering Affordance hit is clear, affordance avoidance not Conflicts triggered by maneuvers -> engineering approach answer pasas Our answer rooted in Functional Modeling and EID/Cognitive Systems Engineering 24
25 Abstraction Hierarchy conflict avoidance functional purpose abstract function generalized function production safety economy absolute (loco-)motion relative motion path control flight 25
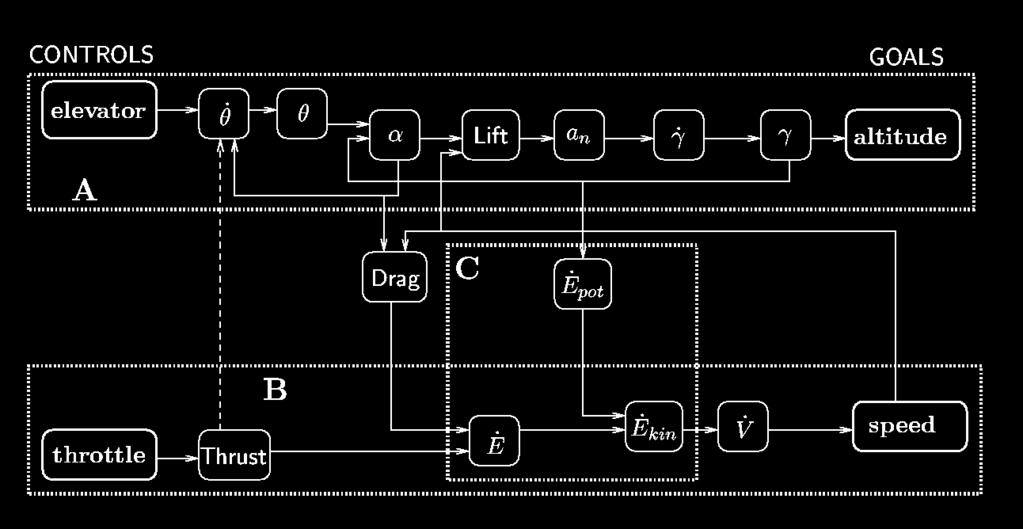
26 Solving some of these issues took us several Msc students Identification of abstract functions Chosen representation of the world+aircraft John Flach's point: What you express at the AF level describes the state of the system, and you should be able to check goal achievement on this basis. René's point: The selection of your state variables determines how you can shape your representation into an interface 26

27 Choosing state representation 27
28 28
29 State Vector Envelope 29

30 Combining for different intruders 30
31 31
32 flight and control safety locomotion production relative motion efficiency aircraft limits 32
33 SVE, what can you see Other ships, protected zones of other ships Surrounding airspace Destination waypoints/headings Shape of surrounding airspace (function morphology), in terms of heading+speed 33
34 Vertical path+speed control Common task in flying, following speed+altitude profile Limited focus, on part of flying task AH for aircraft basic motions 34

35 The problem is energy 35
36 Aircraft dynamics+kinematics Flight path determines potential energy rate Throttle -> (mainly) total energy rate Stick -> (mainly) pitch rotation, indirectly flight path angle 36
37 37
38 38
39 39
40 Causality and Block Diagrams Cannot follow the block diagram and reason Translates into constraints for the system Control actions are a result from properties of the actor (human) and the system (car) 40
41 CSE/EID alone is not enough: Pilot in closed loop control Target Output Display Human System But this only applies to laboratory tasks and fliying with a flight director! 41
42 Pilot in real-world control egomotion Environment 1 2 purpose Human Display 3 System output 4 No 4, the EID display, must be compatible with 1, environment cues, and show the workspace in which 2, the pilot's purpose, is realized, under control of 3. 42
43 safety production joy comfort efficiency locomotion publication of travel travel space roadway fixed boundaries moving objects 43
44 Other designs Free-path decelerating approaches Emergency landing guidance system Terrain information in Synthetic Vision Vertical ASAS with energy/altitude trade-off Applications for Vessel Traffic Services (maritime) CSE in Unmanned Autonomous Vehicle control Focus on validation of EID designs 44
45 45
46 Ecological match for cybernetics of airplane control Compatibility between pilot goals, direct perception from environment, human control output and display (haptic, visual, auditory etc.) When dealing with a closed, high bandwidth loop with time delays, need control theoretic/cybernetic analyses Role of ecological approach is in discovering what the environment affords to the vehicle/driver, and what is under-specified Inner + outer loops, part of the faster dynamics can be handled by the human 46
47 EID is still design, Depends on creativity designer Not any AH hierarchy representation is good enough, search for the meaningful physics 47
48 SKR taxonomy Rasmussen shortcuts recognition stored action 48
49 Situated Cognition Hutchins recognize orient align speak encode read-off draw align compare 49
50 Implications for design Internal representation? Memory, reasoning? Models like IDA? Engineering units, comparison to automatic controllers, reasoning programs 50
Beyond ergonomics, beyond integration, The world behind the display
 Beyond ergonomics, beyond integration, The world behind the display -Ecological Interface Design for the Flight Deck- Max Mulder, Control and Simulation Division 26-5-2011 Delft University of Technology
Beyond ergonomics, beyond integration, The world behind the display -Ecological Interface Design for the Flight Deck- Max Mulder, Control and Simulation Division 26-5-2011 Delft University of Technology
Ecological Flight Deck Design -the world behind the glass-
 Ecological Flight Deck Design -the world behind the glass- 7 th European Flight Test Safety Workshop October 30, 2013 Max Mulder today introduce the human-machine systems group ecological approach to flight
Ecological Flight Deck Design -the world behind the glass- 7 th European Flight Test Safety Workshop October 30, 2013 Max Mulder today introduce the human-machine systems group ecological approach to flight
Designing for Situation Awareness -the world behind the glass-
 aerospace human-machine systems Designing for Situation Awareness -the world behind the glass- Max Mulder Human Factors in Control Oslo, October 12, 2016 TU Delft Aerospace Engineering Control & Simulation
aerospace human-machine systems Designing for Situation Awareness -the world behind the glass- Max Mulder Human Factors in Control Oslo, October 12, 2016 TU Delft Aerospace Engineering Control & Simulation
Designing an HMI for ASAS in respect of situation awareness
 RESEARCH GRANT SCHEME DELFT Contract reference number 08-120917-C EEC contact person: Garfield Dean Designing an HMI for ASAS in respect of situation awareness Ecological ASAS Interfaces 2010 Midterm Progress
RESEARCH GRANT SCHEME DELFT Contract reference number 08-120917-C EEC contact person: Garfield Dean Designing an HMI for ASAS in respect of situation awareness Ecological ASAS Interfaces 2010 Midterm Progress
Towards a 4-Dimensional Separation Assistance Cockpit Display
 Towards a 4-Dimensional Separation Assistance Cockpit Display Joost Ellerbroek, Mark Visser, Stijn B.J. van Dam, Max Mulder and M. M. (René) van Paassen In today s airspace, rapidly increasing amounts
Towards a 4-Dimensional Separation Assistance Cockpit Display Joost Ellerbroek, Mark Visser, Stijn B.J. van Dam, Max Mulder and M. M. (René) van Paassen In today s airspace, rapidly increasing amounts
Designing an HMI for ASAS in respect of situation awareness
 RESEARCH GRANT SCHEME DELFT Contract reference number 08-120917-C EEC contact person: Garfield Dean Designing an HMI for ASAS in respect of situation awareness Ecological ASAS Interfaces 2011 Close-Out
RESEARCH GRANT SCHEME DELFT Contract reference number 08-120917-C EEC contact person: Garfield Dean Designing an HMI for ASAS in respect of situation awareness Ecological ASAS Interfaces 2011 Close-Out
Identifying Human Control Behavior
 Identifying Human Control Behavior In the SIMONA Research Simulator Dr. ir. Herman Damveld 2-6-2010 Challenge the future Outline Aerospace Engineering Human Control Research at Aerospace Engineering Identifying
Identifying Human Control Behavior In the SIMONA Research Simulator Dr. ir. Herman Damveld 2-6-2010 Challenge the future Outline Aerospace Engineering Human Control Research at Aerospace Engineering Identifying
Toward an Integrated Ecological Plan View Display for Air Traffic Controllers
 Wright State University CORE Scholar International Symposium on Aviation Psychology - 2015 International Symposium on Aviation Psychology 2015 Toward an Integrated Ecological Plan View Display for Air
Wright State University CORE Scholar International Symposium on Aviation Psychology - 2015 International Symposium on Aviation Psychology 2015 Toward an Integrated Ecological Plan View Display for Air
RESEARCH FLIGHT SIMULATION OF FUTURE AUTONOMOUS AIRCRAFT OPERATIONS. Mario S.V. Valenti Clari Rob C.J. Ruigrok Bart W.M. Heesbeen Jaap Groeneweg
 Proceedings of the 2002 Winter Simulation Conference E. Yücesan, C.-H. Chen, J. L. Snowdon, and J. M. Charnes, eds. RESEARCH FLIGHT SIMULATION OF FUTURE AUTONOMOUS AIRCRAFT OPERATIONS Mario S.V. Valenti
Proceedings of the 2002 Winter Simulation Conference E. Yücesan, C.-H. Chen, J. L. Snowdon, and J. M. Charnes, eds. RESEARCH FLIGHT SIMULATION OF FUTURE AUTONOMOUS AIRCRAFT OPERATIONS Mario S.V. Valenti
WB2306 The Human Controller
 Simulation WB2306 The Human Controller Class 1. General Introduction Adapt the device to the human, not the human to the device! Teacher: David ABBINK Assistant professor at Delft Haptics Lab (www.delfthapticslab.nl)
Simulation WB2306 The Human Controller Class 1. General Introduction Adapt the device to the human, not the human to the device! Teacher: David ABBINK Assistant professor at Delft Haptics Lab (www.delfthapticslab.nl)
Integrated Safety Envelopes
 Integrated Safety Envelopes Built-in Restrictions of Navigable Airspace Edward A. Lee Professor, EECS, UC Berkeley NSF / OSTP Workshop on Information Technology Research for Critical Infrastructure Protection
Integrated Safety Envelopes Built-in Restrictions of Navigable Airspace Edward A. Lee Professor, EECS, UC Berkeley NSF / OSTP Workshop on Information Technology Research for Critical Infrastructure Protection
"This powerpoint presentation is property of David Abbink and Delft University of Technology. No part of this publication may be reproduced, stored
 "This powerpoint presentation is property of David Abbink and Delft University of Technology. No part of this publication may be reproduced, stored in other retrieval systems or transmitted in any form
"This powerpoint presentation is property of David Abbink and Delft University of Technology. No part of this publication may be reproduced, stored in other retrieval systems or transmitted in any form
Virtual Shadow: Making Cross Traffic Dynamics Visible through Augmented Reality Head Up Display
 Proceedings of the Human Factors and Ergonomics Society 2016 Annual Meeting 2093 Virtual Shadow: Making Cross Traffic Dynamics Visible through Augmented Reality Head Up Display Hyungil Kim, Jessica D.
Proceedings of the Human Factors and Ergonomics Society 2016 Annual Meeting 2093 Virtual Shadow: Making Cross Traffic Dynamics Visible through Augmented Reality Head Up Display Hyungil Kim, Jessica D.
Development and Evaluation of a Collision Avoidance Display for Supporting Pilots Decision Making in a Free Flight Environment
 Proceedings of the 2014 International Conference on Industrial Engineering and Operations Management Bali, Indonesia, January 7 9, 2014 Development and Evaluation of a Collision Avoidance Display for Supporting
Proceedings of the 2014 International Conference on Industrial Engineering and Operations Management Bali, Indonesia, January 7 9, 2014 Development and Evaluation of a Collision Avoidance Display for Supporting
ACAS Xu UAS Detect and Avoid Solution
 ACAS Xu UAS Detect and Avoid Solution Wes Olson 8 December, 2016 Sponsor: Neal Suchy, TCAS Program Manager, AJM-233 DISTRIBUTION STATEMENT A. Approved for public release: distribution unlimited. Legal
ACAS Xu UAS Detect and Avoid Solution Wes Olson 8 December, 2016 Sponsor: Neal Suchy, TCAS Program Manager, AJM-233 DISTRIBUTION STATEMENT A. Approved for public release: distribution unlimited. Legal
Potential Uses of Virtual and Augmented Reality Devices in Commercial Training Applications
 Potential Uses of Virtual and Augmented Reality Devices in Commercial Training Applications Dennis Hartley Principal Systems Engineer, Visual Systems Rockwell Collins April 17, 2018 WATS 2018 Virtual Reality
Potential Uses of Virtual and Augmented Reality Devices in Commercial Training Applications Dennis Hartley Principal Systems Engineer, Visual Systems Rockwell Collins April 17, 2018 WATS 2018 Virtual Reality
Stanford Center for AI Safety
 Stanford Center for AI Safety Clark Barrett, David L. Dill, Mykel J. Kochenderfer, Dorsa Sadigh 1 Introduction Software-based systems play important roles in many areas of modern life, including manufacturing,
Stanford Center for AI Safety Clark Barrett, David L. Dill, Mykel J. Kochenderfer, Dorsa Sadigh 1 Introduction Software-based systems play important roles in many areas of modern life, including manufacturing,
The application of Work Domain Analysis (WDA) for the development of vehicle control display
 for the development of vehicle control display") Proceedings of the 7th WSEAS International Conference on Applied Informatics and Communications, Athens, Greece, August 24-26, 2007 160 The application of Work Domain Analysis (WDA) for the development
Proceedings of the 7th WSEAS International Conference on Applied Informatics and Communications, Athens, Greece, August 24-26, 2007 160 The application of Work Domain Analysis (WDA) for the development
Copyrighted Material - Taylor & Francis
 22 Traffic Alert and Collision Avoidance System II (TCAS II) Steve Henely Rockwell Collins 22. Introduction...22-22.2 Components...22-2 22.3 Surveillance...22-3 22. Protected Airspace...22-3 22. Collision
22 Traffic Alert and Collision Avoidance System II (TCAS II) Steve Henely Rockwell Collins 22. Introduction...22-22.2 Components...22-2 22.3 Surveillance...22-3 22. Protected Airspace...22-3 22. Collision
Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model
 Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model by Dr. Buddy H Jeun and John Younker Sensor Fusion Technology, LLC 4522 Village Springs Run
Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model by Dr. Buddy H Jeun and John Younker Sensor Fusion Technology, LLC 4522 Village Springs Run
Introduction Objective and Scope p. 1 Generic Requirements p. 2 Basic Requirements p. 3 Surveillance System p. 3 Content of the Book p.
 Preface p. xi Acknowledgments p. xvii Introduction Objective and Scope p. 1 Generic Requirements p. 2 Basic Requirements p. 3 Surveillance System p. 3 Content of the Book p. 4 References p. 6 Maritime
Preface p. xi Acknowledgments p. xvii Introduction Objective and Scope p. 1 Generic Requirements p. 2 Basic Requirements p. 3 Surveillance System p. 3 Content of the Book p. 4 References p. 6 Maritime
Designing & Deploying Multimodal UIs in Autonomous Vehicles
 Designing & Deploying Multimodal UIs in Autonomous Vehicles Bruce N. Walker, Ph.D. Professor of Psychology and of Interactive Computing Georgia Institute of Technology Transition to Automation Acceptance
Designing & Deploying Multimodal UIs in Autonomous Vehicles Bruce N. Walker, Ph.D. Professor of Psychology and of Interactive Computing Georgia Institute of Technology Transition to Automation Acceptance
16.400/453J Human Factors Engineering /453. Displays. Prof. D. C. Chandra Lecture 7
 J Human Factors Engineering Displays Prof. D. C. Chandra Lecture 7 1 Overview Taxonomy of displays Classic display issues Design and evaluation of flight deck displays EFB discussion Display examples from
J Human Factors Engineering Displays Prof. D. C. Chandra Lecture 7 1 Overview Taxonomy of displays Classic display issues Design and evaluation of flight deck displays EFB discussion Display examples from
Work Domain Analysis (WDA) for Ecological Interface Design (EID) of Vehicle Control Display
 for Ecological Interface Design (EID) of Vehicle Control Display") Work Domain Analysis (WDA) for Ecological Interface Design (EID) of Vehicle Control Display SUK WON LEE, TAEK SU NAM, ROHAE MYUNG Division of Information Management Engineering Korea University 5-Ga, Anam-Dong,
Work Domain Analysis (WDA) for Ecological Interface Design (EID) of Vehicle Control Display SUK WON LEE, TAEK SU NAM, ROHAE MYUNG Division of Information Management Engineering Korea University 5-Ga, Anam-Dong,
Small Airplane Approach for Enhancing Safety Through Technology. Federal Aviation Administration
 Small Airplane Approach for Enhancing Safety Through Technology Objectives Communicate Our Experiences Managing Risk & Incremental Improvement Discuss How Our Experience Might Benefit the Rotorcraft Community
Small Airplane Approach for Enhancing Safety Through Technology Objectives Communicate Our Experiences Managing Risk & Incremental Improvement Discuss How Our Experience Might Benefit the Rotorcraft Community
Modeling and Simulation Made Easy with Simulink Carlos Osorio Principal Application Engineer MathWorks Natick, MA
 Modeling and Simulation Made Easy with Simulink Carlos Osorio Principal Application Engineer MathWorks Natick, MA 2013 The MathWorks, Inc. 1 Questions covered in this presentation 1. Why do we do modeling
Modeling and Simulation Made Easy with Simulink Carlos Osorio Principal Application Engineer MathWorks Natick, MA 2013 The MathWorks, Inc. 1 Questions covered in this presentation 1. Why do we do modeling
Perceptual Overlays for Teaching Advanced Driving Skills
 Perceptual Overlays for Teaching Advanced Driving Skills Brent Gillespie Micah Steele ARC Conference May 24, 2000 5/21/00 1 Outline 1. Haptics in the Driver-Vehicle Interface 2. Perceptual Overlays for
Perceptual Overlays for Teaching Advanced Driving Skills Brent Gillespie Micah Steele ARC Conference May 24, 2000 5/21/00 1 Outline 1. Haptics in the Driver-Vehicle Interface 2. Perceptual Overlays for
KPI is one of the oldest and biggest technical universities in Ukraine. It was founded in 1898.
 National Technical University of Ukraine Kyiv Polytechnic Institute KPI is one of the oldest and biggest technical universities in Ukraine. It was founded in 1898. OVERVIEW 39 bachelor s, 92 master s,
National Technical University of Ukraine Kyiv Polytechnic Institute KPI is one of the oldest and biggest technical universities in Ukraine. It was founded in 1898. OVERVIEW 39 bachelor s, 92 master s,
Naturalistic Flying Study as a Method of Collecting Pilot Communication Behavior Data
 IEEE Cognitive Communications for Aerospace Applications Workshop 2017 Naturalistic Flying Study as a Method of Collecting Pilot Communication Behavior Data Chang-Geun Oh, Ph.D Kent State University Why
IEEE Cognitive Communications for Aerospace Applications Workshop 2017 Naturalistic Flying Study as a Method of Collecting Pilot Communication Behavior Data Chang-Geun Oh, Ph.D Kent State University Why
Intelligent driving TH« TNO I Innovation for live
 Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
This page is intentionally blank. GARMIN G1000 SYNTHETIC VISION AND PATHWAYS OPTION Rev 1 Page 2 of 27
 This page is intentionally blank. 190-00492-15 Rev 1 Page 2 of 27 Revision Number Page Number(s) LOG OF REVISIONS Description FAA Approved Date of Approval 1 All Initial Release See Page 1 See Page 1 190-00492-15
This page is intentionally blank. 190-00492-15 Rev 1 Page 2 of 27 Revision Number Page Number(s) LOG OF REVISIONS Description FAA Approved Date of Approval 1 All Initial Release See Page 1 See Page 1 190-00492-15
Joint Human-Automation Cognition through a Shared Representation of 4D Trajectory Management
 Joint Human-Automation Cognition through a Shared Representation of 4D Trajectory Management Rolf Klomp, M.M. (René) van Paassen, Clark Borst, Max Mulder, Control and Simulation, Aerospace Engineering
Joint Human-Automation Cognition through a Shared Representation of 4D Trajectory Management Rolf Klomp, M.M. (René) van Paassen, Clark Borst, Max Mulder, Control and Simulation, Aerospace Engineering
CSE 165: 3D User Interaction. Lecture #14: 3D UI Design
 CSE 165: 3D User Interaction Lecture #14: 3D UI Design 2 Announcements Homework 3 due tomorrow 2pm Monday: midterm discussion Next Thursday: midterm exam 3D UI Design Strategies 3 4 Thus far 3DUI hardware
CSE 165: 3D User Interaction Lecture #14: 3D UI Design 2 Announcements Homework 3 due tomorrow 2pm Monday: midterm discussion Next Thursday: midterm exam 3D UI Design Strategies 3 4 Thus far 3DUI hardware
COURSE MODULES LEVEL 3.1 & 3.2
 COURSE MODULES LEVEL 3.1 & 3.2 6-Month Internship The six-month internship provides students with the opportunity to apply the knowledge acquired in the classroom to work situations, and demonstrate problem
COURSE MODULES LEVEL 3.1 & 3.2 6-Month Internship The six-month internship provides students with the opportunity to apply the knowledge acquired in the classroom to work situations, and demonstrate problem
Unit IV: Sensation & Perception. Module 19 Vision Organization & Interpretation
 Unit IV: Sensation & Perception Module 19 Vision Organization & Interpretation Visual Organization 19-1 Perceptual Organization 19-1 How do we form meaningful perceptions from sensory information? A group
Unit IV: Sensation & Perception Module 19 Vision Organization & Interpretation Visual Organization 19-1 Perceptual Organization 19-1 How do we form meaningful perceptions from sensory information? A group
FlyRealHUDs Very Brief Helo User s Manual
 FlyRealHUDs Very Brief Helo User s Manual 1 1.0 Welcome! Congratulations. You are about to become one of the elite pilots who have mastered the fine art of flying the most advanced piece of avionics in
FlyRealHUDs Very Brief Helo User s Manual 1 1.0 Welcome! Congratulations. You are about to become one of the elite pilots who have mastered the fine art of flying the most advanced piece of avionics in
The MPI CyberMotion Simulator: A Novel Research Platform to Investigate Human Control Behavior
 Invited Paper Journal of Computing Science and Engineering, Vol. 7, No. 2, June 2013, pp. 122-131 The MPI CyberMotion Simulator: A Novel Research Platform to Investigate Human Control Behavior Frank M.
Invited Paper Journal of Computing Science and Engineering, Vol. 7, No. 2, June 2013, pp. 122-131 The MPI CyberMotion Simulator: A Novel Research Platform to Investigate Human Control Behavior Frank M.
Air Traffic Soft. Management. Ultimate System. Call Identifier : FP TREN-3 Thematic Priority 1.4 Aeronautics and Space
 En Route Air Traffic Soft Management Ultimate System Call Identifier : FP6-2004-TREN-3 Thematic Priority 1.4 Aeronautics and Space EUROCONTROL Experimental Centre EUROCONTROL Innovative Research Workshop
En Route Air Traffic Soft Management Ultimate System Call Identifier : FP6-2004-TREN-3 Thematic Priority 1.4 Aeronautics and Space EUROCONTROL Experimental Centre EUROCONTROL Innovative Research Workshop
Potential co-operations between the TCAS and the ASAS
 Potential co-operations between the TCAS and the ASAS An Abeloos, Max Mulder, René van Paassen Delft University of Technology, Faculty of Aerospace Engineering, Kluyverweg 1, 2629 HS Delft, the Netherlands
Potential co-operations between the TCAS and the ASAS An Abeloos, Max Mulder, René van Paassen Delft University of Technology, Faculty of Aerospace Engineering, Kluyverweg 1, 2629 HS Delft, the Netherlands
Design of a Remote-Cockpit for small Aerospace Vehicles
 Design of a Remote-Cockpit for small Aerospace Vehicles Muhammad Faisal, Atheel Redah, Sergio Montenegro Universität Würzburg Informatik VIII, Josef-Martin Weg 52, 97074 Würzburg, Germany Phone: +49 30
Design of a Remote-Cockpit for small Aerospace Vehicles Muhammad Faisal, Atheel Redah, Sergio Montenegro Universität Würzburg Informatik VIII, Josef-Martin Weg 52, 97074 Würzburg, Germany Phone: +49 30
ASSESSING THE IMPACT OF A NEW AIR TRAFFIC CONTROL INSTRUCTION ON FLIGHT CREW ACTIVITY. Carine Hébraud Sofréavia. Nayen Pène and Laurence Rognin STERIA
 ASSESSING THE IMPACT OF A NEW AIR TRAFFIC CONTROL INSTRUCTION ON FLIGHT CREW ACTIVITY Carine Hébraud Sofréavia Nayen Pène and Laurence Rognin STERIA Eric Hoffman and Karim Zeghal Eurocontrol Experimental
ASSESSING THE IMPACT OF A NEW AIR TRAFFIC CONTROL INSTRUCTION ON FLIGHT CREW ACTIVITY Carine Hébraud Sofréavia Nayen Pène and Laurence Rognin STERIA Eric Hoffman and Karim Zeghal Eurocontrol Experimental
Can Artificial Intelligence pass the CPL(H) Skill Test?
 Skill Test?") Flight control systems for the autonomous electric light personal-transport aircraft of the near future. Can Artificial Intelligence pass the CPL(H) Skill Test? ICAS Workshop 2017-09-11 Dr. Luuk van Dijk
Flight control systems for the autonomous electric light personal-transport aircraft of the near future. Can Artificial Intelligence pass the CPL(H) Skill Test? ICAS Workshop 2017-09-11 Dr. Luuk van Dijk
Sikorsky S-70i BLACK HAWK Training
 Sikorsky S-70i BLACK HAWK Training Serving Government and Military Crewmembers Worldwide U.S. #15-S-0564 Updated 11/17 FlightSafety offers pilot and maintenance technician training for the complete line
Sikorsky S-70i BLACK HAWK Training Serving Government and Military Crewmembers Worldwide U.S. #15-S-0564 Updated 11/17 FlightSafety offers pilot and maintenance technician training for the complete line
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
CPE/CSC 580: Intelligent Agents
 CPE/CSC 580: Intelligent Agents Franz J. Kurfess Computer Science Department California Polytechnic State University San Luis Obispo, CA, U.S.A. 1 Course Overview Introduction Intelligent Agent, Multi-Agent
CPE/CSC 580: Intelligent Agents Franz J. Kurfess Computer Science Department California Polytechnic State University San Luis Obispo, CA, U.S.A. 1 Course Overview Introduction Intelligent Agent, Multi-Agent
Framework and the Live, Virtual, and Constructive Continuum. Paul Lawrence Hamilton Director, Modeling and Simulation
 The T-BORG T Framework and the Live, Virtual, and Constructive Continuum Paul Lawrence Hamilton Director, Modeling and Simulation July 17, 2013 2007 ORION International Technologies, Inc. The Great Nebula
The T-BORG T Framework and the Live, Virtual, and Constructive Continuum Paul Lawrence Hamilton Director, Modeling and Simulation July 17, 2013 2007 ORION International Technologies, Inc. The Great Nebula
Multi-Axis Pilot Modeling
 Multi-Axis Pilot Modeling Models and Methods for Wake Vortex Encounter Simulations Technical University of Berlin Berlin, Germany June 1-2, 2010 Ronald A. Hess Dept. of Mechanical and Aerospace Engineering
Multi-Axis Pilot Modeling Models and Methods for Wake Vortex Encounter Simulations Technical University of Berlin Berlin, Germany June 1-2, 2010 Ronald A. Hess Dept. of Mechanical and Aerospace Engineering
ENHANCED HUMAN-AGENT INTERACTION: AUGMENTING INTERACTION MODELS WITH EMBODIED AGENTS BY SERAFIN BENTO. MASTER OF SCIENCE in INFORMATION SYSTEMS
 BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
MITIGATING PILOT DISORIENTATION WITH SYNTHETIC VISION DISPLAYS. Kathryn Ballard Trey Arthur Kyle Ellis Renee Lake Stephanie Nicholas Lance Prinzel
 MITIGATING PILOT DISORIENTATION WITH SYNTHETIC VISION DISPLAYS Kathryn Ballard Trey Arthur Kyle Ellis Renee Lake Stephanie Nicholas Lance Prinzel What is the problem? Why NASA? What are synthetic vision
MITIGATING PILOT DISORIENTATION WITH SYNTHETIC VISION DISPLAYS Kathryn Ballard Trey Arthur Kyle Ellis Renee Lake Stephanie Nicholas Lance Prinzel What is the problem? Why NASA? What are synthetic vision
vstasker 6 A COMPLETE MULTI-PURPOSE SOFTWARE TO SPEED UP YOUR SIMULATION PROJECT, FROM DESIGN TIME TO DEPLOYMENT REAL-TIME SIMULATION TOOLKIT FEATURES
 REAL-TIME SIMULATION TOOLKIT A COMPLETE MULTI-PURPOSE SOFTWARE TO SPEED UP YOUR SIMULATION PROJECT, FROM DESIGN TIME TO DEPLOYMENT Diagram based Draw your logic using sequential function charts and let
REAL-TIME SIMULATION TOOLKIT A COMPLETE MULTI-PURPOSE SOFTWARE TO SPEED UP YOUR SIMULATION PROJECT, FROM DESIGN TIME TO DEPLOYMENT Diagram based Draw your logic using sequential function charts and let
Executive Summary. Chapter 1. Overview of Control
 Chapter 1 Executive Summary Rapid advances in computing, communications, and sensing technology offer unprecedented opportunities for the field of control to expand its contributions to the economic and
Chapter 1 Executive Summary Rapid advances in computing, communications, and sensing technology offer unprecedented opportunities for the field of control to expand its contributions to the economic and
DESIGN OF TUNNEL-IN-THE-SKY DISPLAY AND CURVED TRAJECTORY
 24 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES DESIGN OF TUNNEL-IN-THE-SKY DISPLAY AND CURVED TRAJECTORY Kohei FUNABIKI* *Japan Aerospace Exploration Agency Keywords: Tunnel-in-the-Sky, Flight
24 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES DESIGN OF TUNNEL-IN-THE-SKY DISPLAY AND CURVED TRAJECTORY Kohei FUNABIKI* *Japan Aerospace Exploration Agency Keywords: Tunnel-in-the-Sky, Flight
Virtual Experiments as a Tool for Active Engagement
 Virtual Experiments as a Tool for Active Engagement Lei Bao Stephen Stonebraker Gyoungho Lee Physics Education Research Group Department of Physics The Ohio State University Context Cues and Knowledge
Virtual Experiments as a Tool for Active Engagement Lei Bao Stephen Stonebraker Gyoungho Lee Physics Education Research Group Department of Physics The Ohio State University Context Cues and Knowledge
HUMAN-ROBOT COLLABORATION TNO, THE NETHERLANDS. 6 th SAF RA Symposium Sustainable Safety 2030 June 14, 2018 Mr. Johan van Middelaar
 HUMAN-ROBOT COLLABORATION TNO, THE NETHERLANDS 6 th SAF RA Symposium Sustainable Safety 2030 June 14, 2018 Mr. Johan van Middelaar CONTENTS TNO & Robotics Robots and workplace safety: Human-Robot Collaboration,
HUMAN-ROBOT COLLABORATION TNO, THE NETHERLANDS 6 th SAF RA Symposium Sustainable Safety 2030 June 14, 2018 Mr. Johan van Middelaar CONTENTS TNO & Robotics Robots and workplace safety: Human-Robot Collaboration,
Flight Control Laboratory
 Dept. of Aerospace Engineering Flight Dynamics and Control System Course Flight Control Laboratory Professor: Yoshimasa Ochi Associate Professor: Nobuhiro Yokoyama Flight Control Laboratory conducts researches
Dept. of Aerospace Engineering Flight Dynamics and Control System Course Flight Control Laboratory Professor: Yoshimasa Ochi Associate Professor: Nobuhiro Yokoyama Flight Control Laboratory conducts researches
Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model
 1 Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model {Final Version with
1 Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model {Final Version with
The Critical Need for Increased IT Education in Aerospace Undergraduate and Graduate Programs
 The Critical Need for Increased IT Education in Aerospace Undergraduate and Graduate Programs Lyle N. Long Distinguished Professor of Aerospace Engineering The Pennsylvania State University Presented at
The Critical Need for Increased IT Education in Aerospace Undergraduate and Graduate Programs Lyle N. Long Distinguished Professor of Aerospace Engineering The Pennsylvania State University Presented at
Classical Control Based Autopilot Design Using PC/104
 Classical Control Based Autopilot Design Using PC/104 Mohammed A. Elsadig, Alneelain University, Dr. Mohammed A. Hussien, Alneelain University. Abstract Many recent papers have been written in unmanned
Classical Control Based Autopilot Design Using PC/104 Mohammed A. Elsadig, Alneelain University, Dr. Mohammed A. Hussien, Alneelain University. Abstract Many recent papers have been written in unmanned
Fujitsu, SMU, and A*STAR collaborate on traffic management technologies with the Maritime and Port Authority of Singapore
 Fujitsu Limited Agency for Science, Technology and Research (A*STAR) Singapore Management University April 16, 2018 Fujitsu, SMU, and A*STAR collaborate on traffic management technologies with the Maritime
Fujitsu Limited Agency for Science, Technology and Research (A*STAR) Singapore Management University April 16, 2018 Fujitsu, SMU, and A*STAR collaborate on traffic management technologies with the Maritime
Psychophysics of night vision device halo
 University of Wollongong Research Online Faculty of Health and Behavioural Sciences - Papers (Archive) Faculty of Science, Medicine and Health 2009 Psychophysics of night vision device halo Robert S Allison
University of Wollongong Research Online Faculty of Health and Behavioural Sciences - Papers (Archive) Faculty of Science, Medicine and Health 2009 Psychophysics of night vision device halo Robert S Allison
Technology Considerations for Advanced Formation Flight Systems
 Technology Considerations for Advanced Formation Flight Systems Prof. R. John Hansman MIT International Center for Air Transportation How Can Technologies Impact System Concept Need (Technology Pull) Technologies
Technology Considerations for Advanced Formation Flight Systems Prof. R. John Hansman MIT International Center for Air Transportation How Can Technologies Impact System Concept Need (Technology Pull) Technologies
Airbus Autonomy Roadmap
 Airbus Autonomy Roadmap ERTS 2 2018 Embedded Real Time Software and Systems Toulouse January 31 February 2, 2018 Pascal Traverse, General Manager for the Autonomy Thrust Airbus Corporate Technology Office
Airbus Autonomy Roadmap ERTS 2 2018 Embedded Real Time Software and Systems Toulouse January 31 February 2, 2018 Pascal Traverse, General Manager for the Autonomy Thrust Airbus Corporate Technology Office
Salient features make a search easy
 Chapter General discussion This thesis examined various aspects of haptic search. It consisted of three parts. In the first part, the saliency of movability and compliance were investigated. In the second
Chapter General discussion This thesis examined various aspects of haptic search. It consisted of three parts. In the first part, the saliency of movability and compliance were investigated. In the second
ClearVision Complete HUD and EFVS Solution
 ClearVision Complete HUD and EFVS Solution SVS, EVS & CVS Options Overhead-Mounted or Wearable HUD Forward-Fit & Retrofit Solution for Fixed Wing Aircraft EFVS for Touchdown and Roll-out Enhanced Vision
ClearVision Complete HUD and EFVS Solution SVS, EVS & CVS Options Overhead-Mounted or Wearable HUD Forward-Fit & Retrofit Solution for Fixed Wing Aircraft EFVS for Touchdown and Roll-out Enhanced Vision
AUTOMATION & MECHATRONIC SYSTEMS COURSE MODULES
 AUTOMATION & MECHATRONIC SYSTEMS COURSE MODULES A bionic arm, a self-driving car and an autopilot train system - these are some icons of the amazing world of automation technology that are brought about
AUTOMATION & MECHATRONIC SYSTEMS COURSE MODULES A bionic arm, a self-driving car and an autopilot train system - these are some icons of the amazing world of automation technology that are brought about
Part One: Presented by Matranga, North, & Ottinger Part Two: Backup for discussions and archival.
 2/24/2008 1 Go For Lunar Landing Conference, March 4-5, 2008, Tempe, AZ This Presentation is a collaboration of the following Apollo team members (Panel #1): Dean Grimm, NASA MSC LLRV/LLTV Program Manager
2/24/2008 1 Go For Lunar Landing Conference, March 4-5, 2008, Tempe, AZ This Presentation is a collaboration of the following Apollo team members (Panel #1): Dean Grimm, NASA MSC LLRV/LLTV Program Manager
Haptic Collision Avoidance for a Remotely Operated Quadrotor UAV in Indoor Environments
 Brigham Young University BYU ScholarsArchive All Theses and Dissertations 2009-09-18 Haptic Collision Avoidance for a Remotely Operated Quadrotor UAV in Indoor Environments Adam M. Brandt Brigham Young
Brigham Young University BYU ScholarsArchive All Theses and Dissertations 2009-09-18 Haptic Collision Avoidance for a Remotely Operated Quadrotor UAV in Indoor Environments Adam M. Brandt Brigham Young
Will robots really steal our jobs?
 Will robots really steal our jobs? roke.co.uk Will robots really steal our jobs? Media hype can make the future of automation seem like an imminent threat, but our expert in unmanned systems, Dean Thomas,
Will robots really steal our jobs? roke.co.uk Will robots really steal our jobs? Media hype can make the future of automation seem like an imminent threat, but our expert in unmanned systems, Dean Thomas,
The Autonomous Robots Lab. Kostas Alexis
 The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
IEEE IoT Vertical and Topical Summit - Anchorage September 18th-20th, 2017 Anchorage, Alaska. Call for Participation and Proposals
 IEEE IoT Vertical and Topical Summit - Anchorage September 18th-20th, 2017 Anchorage, Alaska Call for Participation and Proposals With its dispersed population, cultural diversity, vast area, varied geography,
IEEE IoT Vertical and Topical Summit - Anchorage September 18th-20th, 2017 Anchorage, Alaska Call for Participation and Proposals With its dispersed population, cultural diversity, vast area, varied geography,
Up, Up, and Away!! Marine Robotics and Remote Duke University Marine Laboratory. David W. Johnston
 Up, Up, and Away!! Marine Robotics and Remote Sensing @ Duke University Marine Laboratory David W. Johnston Assistant Professor of the Practice of Marine Conservation & Ecology! Division of Marine Science
Up, Up, and Away!! Marine Robotics and Remote Sensing @ Duke University Marine Laboratory David W. Johnston Assistant Professor of the Practice of Marine Conservation & Ecology! Division of Marine Science
Microsoft ESP Developer profile white paper
 Microsoft ESP Developer profile white paper Reality XP Simulation www.reality-xp.com Background Microsoft ESP is a visual simulation platform that brings immersive games-based technology to training and
Microsoft ESP Developer profile white paper Reality XP Simulation www.reality-xp.com Background Microsoft ESP is a visual simulation platform that brings immersive games-based technology to training and
Title: A Comparison of Different Tactile Output Devices In An Aviation Application
 Page 1 of 6; 12/2/08 Thesis Proposal Title: A Comparison of Different Tactile Output Devices In An Aviation Application Student: Sharath Kanakamedala Advisor: Christopher G. Prince Proposal: (1) Provide
Page 1 of 6; 12/2/08 Thesis Proposal Title: A Comparison of Different Tactile Output Devices In An Aviation Application Student: Sharath Kanakamedala Advisor: Christopher G. Prince Proposal: (1) Provide
Flight Dynamics AE426
 KING FAHD UNIVERSITY Department of Aerospace Engineering AE426: Flight Dynamics Instructor Dr. Ayman Hamdy Kassem What is flight dynamics? Is the study of aircraft motion and its characteristics. Is it
KING FAHD UNIVERSITY Department of Aerospace Engineering AE426: Flight Dynamics Instructor Dr. Ayman Hamdy Kassem What is flight dynamics? Is the study of aircraft motion and its characteristics. Is it
Author s Name Name of the Paper Session. DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION. Sensing Autonomy.
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION Sensing Autonomy By Arne Rinnan Kongsberg Seatex AS Abstract A certain level of autonomy is already
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION Sensing Autonomy By Arne Rinnan Kongsberg Seatex AS Abstract A certain level of autonomy is already
Simulator Technology in Optimising the Human-Automated System Interface
 Simulator Technology in Optimising the Human-Automated System Interface Cezary Szczepański, Ph.D., M.Sc.Eng. Warsaw University of Technology Faculty of Power and Aeronautics ul. Nowowiejska 24; 00-650
Simulator Technology in Optimising the Human-Automated System Interface Cezary Szczepański, Ph.D., M.Sc.Eng. Warsaw University of Technology Faculty of Power and Aeronautics ul. Nowowiejska 24; 00-650
Development of a Novel Low-Cost Flight Simulator for Pilot Training
 Development of a Novel Low-Cost Flight Simulator for Pilot Training Hongbin Gu, Dongsu Wu, and Hui Liu Abstract A novel low-cost flight simulator with the development goals cost effectiveness and high
Development of a Novel Low-Cost Flight Simulator for Pilot Training Hongbin Gu, Dongsu Wu, and Hui Liu Abstract A novel low-cost flight simulator with the development goals cost effectiveness and high
Human Factors Implications of Continuous Descent Approach Procedures for Noise Abatement in Air Traffic Control
 Human Factors Implications of Continuous Descent Approach Procedures for Noise Abatement in Air Traffic Control Hayley J. Davison Reynolds, hayley@mit.edu Tom G. Reynolds, tgr25@cam.ac.uk R. John Hansman,
Human Factors Implications of Continuous Descent Approach Procedures for Noise Abatement in Air Traffic Control Hayley J. Davison Reynolds, hayley@mit.edu Tom G. Reynolds, tgr25@cam.ac.uk R. John Hansman,
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Ecological Interface Design The Application of Cognitive Interface Design Methodology for a Digitalized Human Machine System
 Guest Lecture of IE546 Human Machine Systems Engineering Ecological Interface Design The Application of Cognitive Interface Design Methodology for a Digitalized Human Machine System Prof. Woo Chang Cha
Guest Lecture of IE546 Human Machine Systems Engineering Ecological Interface Design The Application of Cognitive Interface Design Methodology for a Digitalized Human Machine System Prof. Woo Chang Cha
Design of a Flight Stabilizer System and Automatic Control Using HIL Test Platform
 Design of a Flight Stabilizer System and Automatic Control Using HIL Test Platform Şeyma Akyürek, Gizem Sezin Özden, Emre Atlas, and Coşku Kasnakoğlu Electrical & Electronics Engineering, TOBB University
Design of a Flight Stabilizer System and Automatic Control Using HIL Test Platform Şeyma Akyürek, Gizem Sezin Özden, Emre Atlas, and Coşku Kasnakoğlu Electrical & Electronics Engineering, TOBB University
Static and Moving Patterns (part 2) Lyn Bartram IAT 814 week
 Lyn Bartram IAT 814 week") Static and Moving Patterns (part 2) Lyn Bartram IAT 814 week 9 5.11.2009 Administrivia Assignment 3 Final projects Static and Moving Patterns IAT814 5.11.2009 Transparency and layering Transparency affords
Static and Moving Patterns (part 2) Lyn Bartram IAT 814 week 9 5.11.2009 Administrivia Assignment 3 Final projects Static and Moving Patterns IAT814 5.11.2009 Transparency and layering Transparency affords
OPTIMAL AND PID CONTROLLER FOR CONTROLLING CAMERA S POSITION IN UNMANNED AERIAL VEHICLES
 International Journal of Information Technology, Modeling and Computing (IJITMC) Vol.1,No.4,November 2013 OPTIMAL AND PID CONTROLLER FOR CONTROLLING CAMERA S POSITION IN UNMANNED AERIAL VEHICLES MOHAMMAD
International Journal of Information Technology, Modeling and Computing (IJITMC) Vol.1,No.4,November 2013 OPTIMAL AND PID CONTROLLER FOR CONTROLLING CAMERA S POSITION IN UNMANNED AERIAL VEHICLES MOHAMMAD
The Army s Future Tactical UAS Technology Demonstrator Program
 The Army s Future Tactical UAS Technology Demonstrator Program This information product has been reviewed and approved for public release, distribution A (Unlimited). Review completed by the AMRDEC Public
The Army s Future Tactical UAS Technology Demonstrator Program This information product has been reviewed and approved for public release, distribution A (Unlimited). Review completed by the AMRDEC Public
An Introduction to Airline Communication Types
 AN INTEL COMPANY An Introduction to Airline Communication Types By Chip Downing, Senior Director, Aerospace & Defense WHEN IT MATTERS, IT RUNS ON WIND RIVER EXECUTIVE SUMMARY Today s global airliners use
AN INTEL COMPANY An Introduction to Airline Communication Types By Chip Downing, Senior Director, Aerospace & Defense WHEN IT MATTERS, IT RUNS ON WIND RIVER EXECUTIVE SUMMARY Today s global airliners use
EXPERIMENTAL STUDIES OF THE EFFECT OF INTENT INFORMATION ON COCKPIT TRAFFIC DISPLAYS
 MIT AERONAUTICAL SYSTEMS LABORATORY EXPERIMENTAL STUDIES OF THE EFFECT OF INTENT INFORMATION ON COCKPIT TRAFFIC DISPLAYS Richard Barhydt and R. John Hansman Aeronautical Systems Laboratory Department of
MIT AERONAUTICAL SYSTEMS LABORATORY EXPERIMENTAL STUDIES OF THE EFFECT OF INTENT INFORMATION ON COCKPIT TRAFFIC DISPLAYS Richard Barhydt and R. John Hansman Aeronautical Systems Laboratory Department of
Learning Aircraft Behavior from Real Air Traffic
 Learning Aircraft Behavior from Real Air Traffic Arcady Rantrua 1,2, Eric Maesen 1, Sebastien Chabrier 1, Marie-Pierre Gleizes 2 {firstname.lastname}@soprasteria.com {firstname.lastname}@irit.fr 1 R&D
Learning Aircraft Behavior from Real Air Traffic Arcady Rantrua 1,2, Eric Maesen 1, Sebastien Chabrier 1, Marie-Pierre Gleizes 2 {firstname.lastname}@soprasteria.com {firstname.lastname}@irit.fr 1 R&D
Jager UAVs to Locate GPS Interference
 JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
Engineering excellence through life SIMULATION AND TRAINING. Immersive, high-fidelity, 3D software solutions
 Engineering excellence through life SIMULATION AND TRAINING Immersive, high-fidelity, 3D software solutions Overview Providing Synthetic Environment based training systems and simulations that are efficient,
Engineering excellence through life SIMULATION AND TRAINING Immersive, high-fidelity, 3D software solutions Overview Providing Synthetic Environment based training systems and simulations that are efficient,
Challenges UAV operators face in maintaining spatial orientation Lee Gugerty Clemson University
 Challenges UAV operators face in maintaining spatial orientation Lee Gugerty Clemson University Overview Task analysis of Predator UAV operations UAV synthetic task Spatial orientation challenges Data
Challenges UAV operators face in maintaining spatial orientation Lee Gugerty Clemson University Overview Task analysis of Predator UAV operations UAV synthetic task Spatial orientation challenges Data
OECD WORK ON ARTIFICIAL INTELLIGENCE
 OECD Global Parliamentary Network October 10, 2018 OECD WORK ON ARTIFICIAL INTELLIGENCE Karine Perset, Nobu Nishigata, Directorate for Science, Technology and Innovation ai@oecd.org http://oe.cd/ai OECD
OECD Global Parliamentary Network October 10, 2018 OECD WORK ON ARTIFICIAL INTELLIGENCE Karine Perset, Nobu Nishigata, Directorate for Science, Technology and Innovation ai@oecd.org http://oe.cd/ai OECD
Robotic Technology for Port and Maritime Automation
 Industrial/Service Robots Field Robots Robotic Technology for Port and Maritime Automation Presenter: Assoc Prof Chen I-Ming Director, Robotics Research Center & Intelligent Systems Center School of Mechanical
Industrial/Service Robots Field Robots Robotic Technology for Port and Maritime Automation Presenter: Assoc Prof Chen I-Ming Director, Robotics Research Center & Intelligent Systems Center School of Mechanical
SpaceTec Space 4.0. Michael Schaepman. Remote Sensing Laboratories. Professor of Remote Sensing, Member ESA ESAC. Remote Sensing Laboratories
 SpaceTec Space 4.0 Michael Schaepman Professor of Remote Sensing, Member ESA ESAC 16th SECA Private Equity & Corporate Finance Conference SECA Conference Wednesday, 5 July 2017, 09.00 17.15 SIX ConventionPoint,
SpaceTec Space 4.0 Michael Schaepman Professor of Remote Sensing, Member ESA ESAC 16th SECA Private Equity & Corporate Finance Conference SECA Conference Wednesday, 5 July 2017, 09.00 17.15 SIX ConventionPoint,
Visit of Northrop Grumman. Systems Engineering/ Engineering Design 12/5/16. Jim Scanlan
 Visit of Northrop Grumman Systems Engineering/ Engineering Design 12/5/16 Jim Scanlan Southampton Has eight University Technology Centres; four aerospace related; Rolls-Royce UTC in design Rolls-Royce
Visit of Northrop Grumman Systems Engineering/ Engineering Design 12/5/16 Jim Scanlan Southampton Has eight University Technology Centres; four aerospace related; Rolls-Royce UTC in design Rolls-Royce
Virtual and Augmented Reality: Applications and Issues in a Smart City Context
 Virtual and Augmented Reality: Applications and Issues in a Smart City Context A/Prof Stuart Perry, Faculty of Engineering and IT, University of Technology Sydney 2 Overview VR and AR Fundamentals How
Virtual and Augmented Reality: Applications and Issues in a Smart City Context A/Prof Stuart Perry, Faculty of Engineering and IT, University of Technology Sydney 2 Overview VR and AR Fundamentals How
PROGRESS ON THE SIMULATOR AND EYE-TRACKER FOR ASSESSMENT OF PVFR ROUTES AND SNI OPERATIONS FOR ROTORCRAFT
 PROGRESS ON THE SIMULATOR AND EYE-TRACKER FOR ASSESSMENT OF PVFR ROUTES AND SNI OPERATIONS FOR ROTORCRAFT 1 Rudolph P. Darken, 1 Joseph A. Sullivan, and 2 Jeffrey Mulligan 1 Naval Postgraduate School,
PROGRESS ON THE SIMULATOR AND EYE-TRACKER FOR ASSESSMENT OF PVFR ROUTES AND SNI OPERATIONS FOR ROTORCRAFT 1 Rudolph P. Darken, 1 Joseph A. Sullivan, and 2 Jeffrey Mulligan 1 Naval Postgraduate School,
Predictive Landing Guidance in Synthetic Vision Displays
 The Open Aerospace Engineering Journal, 2011, 4, 11-25 11 Predictive Landing Guidance in Synthetic Vision Displays R.R.D. Arents 1, J. Groeneweg 1, C. Borst 2, M.M. van Paassen 2 and M. Mulder *,2 Open
The Open Aerospace Engineering Journal, 2011, 4, 11-25 11 Predictive Landing Guidance in Synthetic Vision Displays R.R.D. Arents 1, J. Groeneweg 1, C. Borst 2, M.M. van Paassen 2 and M. Mulder *,2 Open
Institut Supérieur de l Aéronautique et de l Espace. Master of Science in Aerospace Engineering ISAE-SUPAERO
 Institut Supérieur de l Aéronautique et de l Espace Master of Science in Aerospace Engineering ISAE-SUPAERO 1 Before ISAE ISAE ISAE+2 Undergraduate studies abroad MSc : 1st year MSc : 2 nd year Semester
Institut Supérieur de l Aéronautique et de l Espace Master of Science in Aerospace Engineering ISAE-SUPAERO 1 Before ISAE ISAE ISAE+2 Undergraduate studies abroad MSc : 1st year MSc : 2 nd year Semester
Propagation of airborne spacing errors in merging traffic streams
 Propagation of airborne spacing errors in merging traffic streams Dan Ivanescu *, Chris Shaw, Eric Hoffman, Karim Zeghal EUROCONTROL Experimental Centre with the support of CASCADE programme & ATC domain
Propagation of airborne spacing errors in merging traffic streams Dan Ivanescu *, Chris Shaw, Eric Hoffman, Karim Zeghal EUROCONTROL Experimental Centre with the support of CASCADE programme & ATC domain
Interactive and Immersive 3D Visualization for ATC
 Interactive and Immersive 3D Visualization for ATC Matt Cooper & Marcus Lange Norrköping Visualization and Interaction Studio University of Linköping, Sweden Summary of last presentation A quick description
Interactive and Immersive 3D Visualization for ATC Matt Cooper & Marcus Lange Norrköping Visualization and Interaction Studio University of Linköping, Sweden Summary of last presentation A quick description