MAP MATCHING AUGMENTED DEAD RECKONING. Walter B. Zavoli Stanley K. Honey. Etak, Incorporated. Menlo Park, California
|
|
|
- Rodney Wiggins
- 6 years ago
- Views:
Transcription

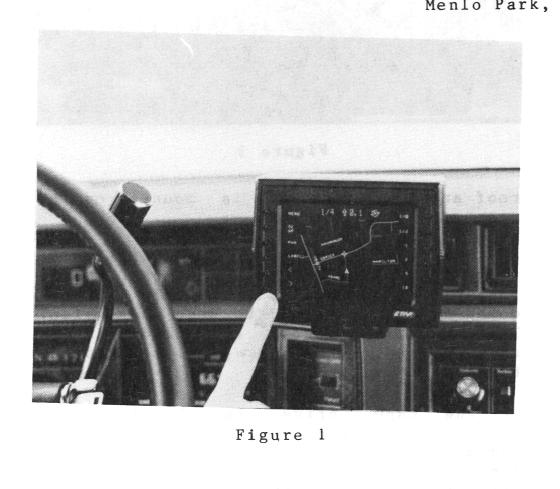
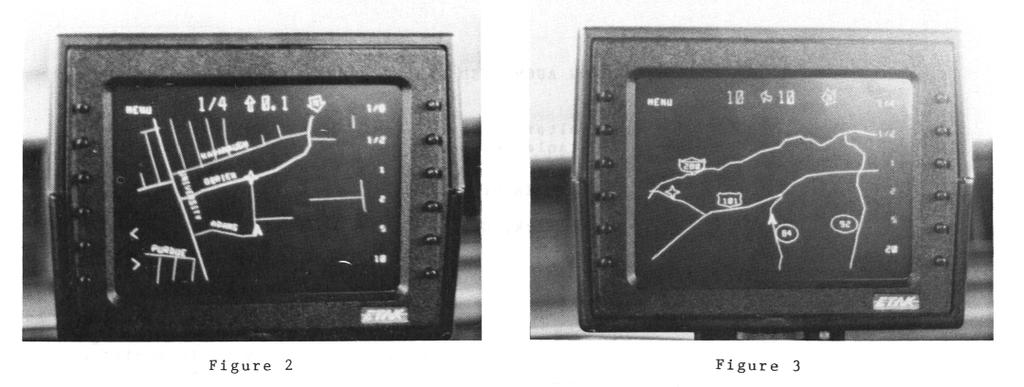
1 MAP MATCHING AUGMENTED DEAD RECKONING Walter B. Zavoli Stanley K. Honey Etak, Incorporated Menlo Park, California Figure 1 ABSTRACT Where am I? Where is my destination? How do I get there? These are questions commonly asked by all drivers. The Etak Navigator is an accurate, low cost and informative vehicle navigation system designed to answer these questions. DESCRIPTION The Etak Navigator provides an electronic road map as shown in Figure 1. The arrowhead car symbol is positioned on the screen indicate to the precise location of the vehicle. As the vehicle moves, the map shifts and rotates "under" the car symbol to maintain accurate position and orientation. With this heading-up moving-map display, the driver assimilates navigation information at a glance. The driver can select different map scales, ranging from a detailed view of the residential streets around him (Figure 21, to a region-wide overview of the freeway system (Figure 3). Roads are prioritized in categories from residential streets to interstates. To limit map complexity, the display shows only major highways in the region-wide scale and adds more detail at larger scales. In this way the display not cluttered with extraneous data. Similarly, dynamic a labeling algorithm labels those streets most likely to be of interest to the driver. As the car changes direction and the map rotates, the labels are reoriented for easy reading and are always written in a readable font size. Navigator The operates a on Key to the Navigator's utility is its combination of dead reckoning and map- conveniently ability to locate matching. map matching eliminates the destinations. A desired destination may accumulation of error attendant in all be specified by the intersection of two dead reckoning systems. streets, a street and house address, or a point on a single street. A street name The Navigator utilizes an on-board index is used by the driver to select the digital map data base which serves as desired street. Multiple choices having input for the map matching process for different street suffixes (e.g. street, finding the location of selected street avenue) city and abbreviations are addresses and for display. presented when needed resolve to ambiguities. The Navigator uses the map The combination of navigation and data base to locate the destination and digital technology map opens new display it as a flashing star along with opportunities for useful products and the current vehicle position on a suitably services. Future special maps with Yellow scaled map. Distance and direction-to-go Page information and routing will help information are also constantly maintained individual drivers. An office-based map on the screen as the vehicle moves. In workstation can solve fleet routing this way, if the driver subsequently problems or serve as the control center selects a map scale which does not contain for real-time monitoring and dispatching destination, the range and bearing of delivery or emergency service vehicles. information is still available. 359

2 Figure 2 Multiple locations may be entered, permanently stored and sorted by city or distance. With this feature a driver may initially enter all appointments for the day and proceed to them in an orderly fashion. The Navigator shows the driver the relevant road network between current position and destination. The prioritized road structure enables the operator to select an efficient route and unexpected detours or traffic situations can be easily accommodated. The Navigator was designed with the multi-task driving function in mind. The high contrast screen provides all pertinent information in one easy-to-view location. The heading-up presentation compliments the driver s intuitive sense of orientation. The prioritized map and dynamic labeling algorithm minimize display complexity enabling the driver to extract pertinent information at a glance. The information is available earlier and more continuously than when relying on passing road signs; giving the driver flexibility performing added navigational tasks. These factors combined with clear the graphical presentation of the destination, enable the driver to proceed to an unfamiliar destination wi efficiency th and confidence. HARDWARE The hardware includes a compass, wheel sensors, cassette a transport, electronic display and a processor. The two-axis flux-gate a compass magnetometer digitally is which compensateduring initial calibration. This solid state compass is small, about the size of a pill box, and slips between Figure 3 roof and headliner or is mounted rear window. on the Wheel sensors comprise str rubberized magnetic tape adhered inside of two wheels. and small f ips of to the errouscored coils clamped to the suspension. The non-driven wheels are used to avoid slip errors caused by poor traction or high speed driving. The tape drive is placed within convenient reach of the driver. Program and map data base are stored on specially manufactured cassettes similar to audio cassettes. A cassette stores 3.5 MBytes and reads data at 200 kilobits per second. Each cassette covers an area comparable to that covered by two typical paper street maps. For example, three cassettes cover the greater San Francisco, Oakland, San Jose area. Highways over a larger area are included on each cassette. A vector display of 770 by 1000 equivalent resolution is presented on either a 4.5 or 7 inch CRT. A vector display used rather than raster scanning the entire display surface, because the vector display does not exhibit aliasing, offers greater brightness for similar phosphors and excitation voltages and eliminates the requirement for a large bit-mapped memory and a high-speed graphics processor. The CRT housing contains 12 buttons which are soft-labeled for ease of use. The above components are connected to a trunk mounted processor unit, about the size of a small shoe box and made from a rugged aluminum extrusion. The processor unit houses three boards containing an 8088 CPU, 2563 DRAM, 16K EPROM, 2K CMOS static RAM, power supply and supporting digital analog and circuitry. The 360

3 Navigator is connected to the vehicle's optionsy and accuracy estimates of the battery and draws 30 watts with ignition current DR position. The key to system on and 0.12 watts under standby. performance is proper updating. The Navigator hardware is capable of near instant-on operation. While the display and program take about one minute to be fully operational, navigation starts within five seconds of vehicle ignition. Current position and calibration constants are stored in non-volatile memory. The program stored in ROM is used to boot in the program from cassette and to navigate in the interim. By storing the program along with the map on cassette, future enhancements in navigation and added features can be easily made available. NAVIGATION The system navigates by a combination of dead reckoning and map matching. Dead Reckoning The compass measures heading and the wheel sensors are used to measure both distance and relative heading. This relative heading information is combined with the absolute heading information from the compass. Use of two independent heading sources allows theffects of magnetic anomalies and wheel skids to be minimized. A new dead reckoned (DR) position is thus computed each second from the previous position and the new distance and heading information. As with any dead reckoning system, errors in position accumulate proportion in sensor to inaccuracies and distance travelled. Map Matching By comparing the vehicle's track to the digital map, the Navigator eliminates the accumulated error that results from dead reckoning. For example, if the vehicle is driving in a straight path and the map contains a nearby straight road corresponding with a heading, the Navigator updates the DR position to a new estimated position along the road. The new position is more accurate than the DR position only in direction the perpendicular to the road. When the vehicle subsequently turns a corner, or drives around a curve, and the Navigator makes a new update, errors are eliminated in the remaining direction. example The above provides a simplified description of some aspects of the navigation algorithms used. The Navigator uses other parameters in making decisions to update to the road network stored on the map. These parameters include the connectivity of the road network, analysis of ambiguous update Erroneous updates destroy the positional accuracy and may cause the system to become lost (i.e., consistently showing the vehicle on the wrong street). By executing map matching every few seconds, significant DR errors are not allowed to accumulate. In addition, the algorithm is designed only to perform map updates when reasonably certain the update will be correct. This enables the system to work well even when the vehicle is driven off the mapped roads, for example in parking lots, driveways or on new streets. Performance Navigator performance was evaluated quantitatively on over 40,000 miles of test driving in 15 vehicles and qualitatively in over 400,000 miles in 50 vehicles. Samples collected at random intersections showed an average 50 foot accuracy while the Navigator was matched to the road network. A more significant measure is demonstrated a average in excess of 120 miles between map matching mistakes requiring manual reset. Once lost, the Navigator can be reset in under 20 seconds. Keeping the Navigator ontrack is thus less time consuming than operating a car radio. Calibration The Navigator is initially calibrated during installation. The installer is instructed to perform simple driving maneuvers during which sensor measurements processed are compute to compass compensations for the vehicle's magnetic effects and distance coefficients for each wheel. The Navigator uses comparisons between the map and the DR track to continually improve the calibrations during routine driving. For example if the DR track generally is "long" compared to the map, the wheel calibration is corrected. This compensates for tire diameter changes due to tread wear. The compass is likewise continually corrected through comparisons with known headings from the map data base. DIGITAL MAP DATA BASE The Navigator requires map information to update its dead reckoning display, to compute destination positions and for display. In order to meet the many map requirements, a topologically structured 361
4 digital map data base is used. Such a system defines significant points, lines and areas, along with their incidence relations. Unlike a digital map image, this map structure can be compactly stored easily and searched, modified, and manipulated. Cultural geographic and features can be associated to any data item. Examples include elevations linked to points, street names linked to lines, and terrain features or city names linked to areas. To supporthe Navigator, Etak is developing a digital map data base covering the USA. The Census Bureau's digital map file is used as the primary source of street name and address information. Coordinates are obtained from either United States Geological Survey topographical maps, or from aerial photographs. Approximately one half of the roads in US metropolitan areas have been digitized using a mapping process which provides approximately a three fold improvement productivity in over conventional techniques. SUMMARY The Etak Navigator has been described with emphasis placed on its accurate navigation, low cost design achieved through innovative use of digital maps, and its informative display approach. The Navigator is indicative of taking the technology and information explosion onto the nation's roads. Future applications are many and varied; each in part will answer the questions; Where am I? Where is my destination? How do I get there? An accurate and up-to-date nationwide digital many data base has map applications beyond in-vehicle navigation. Applications include routing, paper map publishing, matching address fields to coordinates, enhanced Yellow Pages and aids to marketing, billing, field asset management and travel itinerary functions. AUTOHATIC VEHICLE LOCATION Perhaps the most direct application of the data base is in linking a fleet of Navigator equipped vehicles to a central control or dispatch center. By connecting the Navigator's optional RS232C interface to a digital radio, position and status messages can be automatically radioed to headquarters. There with a map workstation, the dispatcher can monitor in real time the whereabouts of the fleet, take new calls and quickly and reliably dispatch closest the vehicle. The dispatch instructions can be conveyed by radio back to the vehicle to appear unambiguously on its screen - again aiding response time. In non-real time applications a map workstation can be used to input a fleet's daily deliveries. Clustering and routing algorithms can aid the dispatcher in efficient utilization of the fleet. Once a vehicle's route is established it may be down-loaded to a memory cartridge, given to the driver and plugged into the vphicle's Navigator for efficient, hastle free deliveries. 362
5
6
Introduction...3. System Overview...4. Navigation Computer GPS Antenna...6. Speed Signal...6 MOST RGB Lines...6. Navigation Display...
 Table of Contents E65 NAVIGATION SYSTEM Subject Page Introduction...............................................3 System Overview...........................................4 Components Navigation Computer.....................................
Table of Contents E65 NAVIGATION SYSTEM Subject Page Introduction...............................................3 System Overview...........................................4 Components Navigation Computer.....................................
Robotic Vehicle Design
 Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 19, 2005 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary Sensor
Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 19, 2005 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary Sensor
Robotic Vehicle Design
 Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 2008 1of 14 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary
Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 2008 1of 14 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary
MICROPROCESSOR BASED CONTROLLERS
 MICROPROCESSOR BASED CONTROLLERS INPUTS Digital Analog TTL Pulse Keyboard Serial Microprocessor Based Controller OUTPUTS On/Off Analog PWM Serial Graphical Text RS232 Abstract: A controller is a system
MICROPROCESSOR BASED CONTROLLERS INPUTS Digital Analog TTL Pulse Keyboard Serial Microprocessor Based Controller OUTPUTS On/Off Analog PWM Serial Graphical Text RS232 Abstract: A controller is a system
Navigation System (8-inch with Navi system only)
") Navigation System (8-inch with Navi system only) Basic Operation Map Screen Map Screen Overview Map Screen Buttons Overview Map Screen Operation Current Position Display Map Scale Orientation Of The Map
Navigation System (8-inch with Navi system only) Basic Operation Map Screen Map Screen Overview Map Screen Buttons Overview Map Screen Operation Current Position Display Map Scale Orientation Of The Map
GEOMETRICS technical report
 GEOMETRICS technical report MA-TR 15 A GUIDE TO PASSIVE MAGNETIC COMPENSATION OF AIRCRAFT A fixed installation of a total field magnetometer sensor on an aircraft is much more desirable than the towed
GEOMETRICS technical report MA-TR 15 A GUIDE TO PASSIVE MAGNETIC COMPENSATION OF AIRCRAFT A fixed installation of a total field magnetometer sensor on an aircraft is much more desirable than the towed
Important Considerations For Graphical Representations Of Data
 This document will help you identify important considerations when using graphs (also called charts) to represent your data. First, it is crucial to understand how to create good graphs. Then, an overview
This document will help you identify important considerations when using graphs (also called charts) to represent your data. First, it is crucial to understand how to create good graphs. Then, an overview
Chapter 3: Assorted notions: navigational plots, and the measurement of areas and non-linear distances
 : navigational plots, and the measurement of areas and non-linear distances Introduction Before we leave the basic elements of maps to explore other topics it will be useful to consider briefly two further
: navigational plots, and the measurement of areas and non-linear distances Introduction Before we leave the basic elements of maps to explore other topics it will be useful to consider briefly two further
Chapter 6 Navigation and Field Mapping
 Chapter 6 Navigation and Field Mapping In this chapter you will learn about: Orienting maps Measuring a bearing on a map Plotting points on a map using latitude/longitude Plotting points on a map using
Chapter 6 Navigation and Field Mapping In this chapter you will learn about: Orienting maps Measuring a bearing on a map Plotting points on a map using latitude/longitude Plotting points on a map using
COMAND Operator, s Manual
 Order-No. DaimlerChrysler 6515 6635 13 Blaupunkt 8 622 402 630 Index B Parts-No. 203 584 01 93 USA Edition A 2002 203/463 Operator, s Manual COMAND COMAND Operator, s Manual As a result of new improvements
Order-No. DaimlerChrysler 6515 6635 13 Blaupunkt 8 622 402 630 Index B Parts-No. 203 584 01 93 USA Edition A 2002 203/463 Operator, s Manual COMAND COMAND Operator, s Manual As a result of new improvements
FLCS V2.1. AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station
 AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
Note to Teacher. Description of the investigation. Time Required. Materials. Procedures for Wheel Size Matters TEACHER. LESSONS WHEEL SIZE / Overview
 In this investigation students will identify a relationship between the size of the wheel and the distance traveled when the number of rotations of the motor axles remains constant. It is likely that many
In this investigation students will identify a relationship between the size of the wheel and the distance traveled when the number of rotations of the motor axles remains constant. It is likely that many
Acu-Park TM. user s guide Directed Electronics, Inc. Vista, CA N9100T 09-04
 Acu-Park TM user s guide 2004 Directed Electronics, Inc. Vista, CA N9100T 09-04 limited one year warranty Directed Electronics, Inc. (hereinafter "Directed") promises to the original purchaser that this
Acu-Park TM user s guide 2004 Directed Electronics, Inc. Vista, CA N9100T 09-04 limited one year warranty Directed Electronics, Inc. (hereinafter "Directed") promises to the original purchaser that this
The vehicle needs to receive data from at least four different satellites to give a three dimensional fix on its current position.
 Page 1 of 15 Published : May 14, 2004 Navigation System INTRODUCTION TO THE GLOBAL POSITIONING SYSTEM (GPS) The system used to calculate the current position of the vehicle is called the GPS (global positioning
Page 1 of 15 Published : May 14, 2004 Navigation System INTRODUCTION TO THE GLOBAL POSITIONING SYSTEM (GPS) The system used to calculate the current position of the vehicle is called the GPS (global positioning
Navigation Aid System Setup and Operation Manual
 Navigation Aid System Setup and Operation Manual 016-0171-055 Revision G, 5/8/2012 Page 2 of 21 Change History Revision Date Description G 5/8/2012 Updated to Raven Marine Logo and new style F 11/23/10
Navigation Aid System Setup and Operation Manual 016-0171-055 Revision G, 5/8/2012 Page 2 of 21 Change History Revision Date Description G 5/8/2012 Updated to Raven Marine Logo and new style F 11/23/10
Fluxgate Magnetometer
 6.101 Final Project Proposal Woojeong Elena Byun Jack Erdozain Farita Tasnim 7 April 2016 Fluxgate Magnetometer Motivation: A fluxgate magnetometer is a highly precise magnetic field sensor. Its typical
6.101 Final Project Proposal Woojeong Elena Byun Jack Erdozain Farita Tasnim 7 April 2016 Fluxgate Magnetometer Motivation: A fluxgate magnetometer is a highly precise magnetic field sensor. Its typical
A Covert Tracking System Using the DDF5931
 1.0 Introduction A Covert Tracking System Using the DDF5931 A Technical Application Note from Doppler Systems April 25, 2004 This application note describes a simple covert tracking system using the Doppler
1.0 Introduction A Covert Tracking System Using the DDF5931 A Technical Application Note from Doppler Systems April 25, 2004 This application note describes a simple covert tracking system using the Doppler
Note to the Teacher. Description of the investigation. Time Required. Additional Materials VEX KITS AND PARTS NEEDED
 In this investigation students will identify a relationship between the size of the wheel and the distance traveled when the number of rotations of the motor axles remains constant. Students are required
In this investigation students will identify a relationship between the size of the wheel and the distance traveled when the number of rotations of the motor axles remains constant. Students are required
Electronic Compass Sensors Rev. 1.1 Jan. 2002
 Electronic Compass Sensors Rev. 1.1 Jan. 2002 TCM2 Series TCM2-20 TCM2-50 TCM2-80 TCMVR Series TCMVR-20 TCMVR-50 V2X Series V2X V2XG registered trademarks of Precision Navigation Inc. TCM 2 Series The
Electronic Compass Sensors Rev. 1.1 Jan. 2002 TCM2 Series TCM2-20 TCM2-50 TCM2-80 TCMVR Series TCMVR-20 TCMVR-50 V2X Series V2X V2XG registered trademarks of Precision Navigation Inc. TCM 2 Series The
ADMINISTRATION BULLETIN
 SERVICE All DATE 11/04 1-186 ADMINISTRATION BULLETIN Using WDS To Program/Configure Control Modules Common Issues/Solutions VID Block Background Information MODEL VIN Refer to Text Introduction: Successful
SERVICE All DATE 11/04 1-186 ADMINISTRATION BULLETIN Using WDS To Program/Configure Control Modules Common Issues/Solutions VID Block Background Information MODEL VIN Refer to Text Introduction: Successful
Installation Guide - Addendum Garmin to Contigo 6150 & 6151
 Beacon and Garmin: Dispatch and Navigation The Contigo 6150 & 6151 provide a fleet management interface to Garmin Personal Navigation Devices (PNDs) including the nüvi 2x5, 465, 12xx, 13xx, and 14xx series.
Beacon and Garmin: Dispatch and Navigation The Contigo 6150 & 6151 provide a fleet management interface to Garmin Personal Navigation Devices (PNDs) including the nüvi 2x5, 465, 12xx, 13xx, and 14xx series.
Versatile solutions for spectrum monitoring
 Monitoring s Monitoring and Direction Finding Systems R&S TMS Versatile solutions for spectrum 43886/5 FIG 1 R&S TMS200 with options; here used as a fixed station with Antennas R&S ADD195 (left) and R&S
Monitoring s Monitoring and Direction Finding Systems R&S TMS Versatile solutions for spectrum 43886/5 FIG 1 R&S TMS200 with options; here used as a fixed station with Antennas R&S ADD195 (left) and R&S
Improved Pedestrian Navigation Based on Drift-Reduced NavChip MEMS IMU
 Improved Pedestrian Navigation Based on Drift-Reduced NavChip MEMS IMU Eric Foxlin Aug. 3, 2009 WPI Workshop on Precision Indoor Personnel Location and Tracking for Emergency Responders Outline Summary
Improved Pedestrian Navigation Based on Drift-Reduced NavChip MEMS IMU Eric Foxlin Aug. 3, 2009 WPI Workshop on Precision Indoor Personnel Location and Tracking for Emergency Responders Outline Summary
Philips. Earth field sensors: the natural choice. Philips. Semiconductors
 Philips Earth field sensors: the natural choice Philips Semiconductors Earth magnetic field sensing: a Philips strength Within its extensive range, Philips Semiconductors has a number of magnetoresistive
Philips Earth field sensors: the natural choice Philips Semiconductors Earth magnetic field sensing: a Philips strength Within its extensive range, Philips Semiconductors has a number of magnetoresistive
V2X-Locate Positioning System Whitepaper
 V2X-Locate Positioning System Whitepaper November 8, 2017 www.cohdawireless.com 1 Introduction The most important piece of information any autonomous system must know is its position in the world. This
V2X-Locate Positioning System Whitepaper November 8, 2017 www.cohdawireless.com 1 Introduction The most important piece of information any autonomous system must know is its position in the world. This
Trunking Information Control Console
 Trunking Information Control Console One Touch Communication and Control In a TICC we can: Initiate a call in one touch Send a status in one touch Call a group of users in one touch See what type of call
Trunking Information Control Console One Touch Communication and Control In a TICC we can: Initiate a call in one touch Send a status in one touch Call a group of users in one touch See what type of call
CONVERTING BEARINGS CONT. Grid to Magnetic subtract (GMS - grand ma sleeps) 1 BACK BEARINGS CONVERTING BEARINGS
 1 BACK BEARINGS CONVERTING BEARINGS") CONVERTING BEARINGS CONT 2 Grid to Magnetic subtract (GMS - grand ma sleeps) ^Khd,YhE^>E h^dz>/ezdzd^z/' Es/'d/KE CONVERTING BEARINGS 1 BACK BEARINGS 3 Magnetic to Grid add (MGA - my great aunt) Back Bearings
CONVERTING BEARINGS CONT 2 Grid to Magnetic subtract (GMS - grand ma sleeps) ^Khd,YhE^>E h^dz>/ezdzd^z/' Es/'d/KE CONVERTING BEARINGS 1 BACK BEARINGS 3 Magnetic to Grid add (MGA - my great aunt) Back Bearings
SSI Technologies - Application Note AT-AN1 Acu-Trac Ultrasonic Fluid Level Sensors Product Overview
 Product Description The Acu-Trac family of ultrasonic fluid level sensor is non-contact fluid level sensors that are a direct replacement for level senders on tanks with depths up to 3.0 m. The ultrasonic
Product Description The Acu-Trac family of ultrasonic fluid level sensor is non-contact fluid level sensors that are a direct replacement for level senders on tanks with depths up to 3.0 m. The ultrasonic
AutoBench 1.1. software benchmark data book.
 AutoBench 1.1 software benchmark data book Table of Contents Angle to Time Conversion...2 Basic Integer and Floating Point...4 Bit Manipulation...5 Cache Buster...6 CAN Remote Data Request...7 Fast Fourier
AutoBench 1.1 software benchmark data book Table of Contents Angle to Time Conversion...2 Basic Integer and Floating Point...4 Bit Manipulation...5 Cache Buster...6 CAN Remote Data Request...7 Fast Fourier
P H Y S I C A L P R O P E R T Y M E A S U R E M E N T S Y S T E M. Quantum Design
 P H Y S I C A L P R O P E R T Y M E A S U R E M E N T S Y S T E M Quantum Design S Y S T E M F E A T U R E S THE QUANTUM DESIGN PHYSICAL PROPERTY EASE OF USE MEASUREMENT SYSTEM (PPMS) REPRESENTS A UNIQUE
P H Y S I C A L P R O P E R T Y M E A S U R E M E N T S Y S T E M Quantum Design S Y S T E M F E A T U R E S THE QUANTUM DESIGN PHYSICAL PROPERTY EASE OF USE MEASUREMENT SYSTEM (PPMS) REPRESENTS A UNIQUE
Using Magnetic Sensors for Absolute Position Detection and Feedback. Kevin Claycomb University of Evansville
 Using Magnetic Sensors for Absolute Position Detection and Feedback. Kevin Claycomb University of Evansville Using Magnetic Sensors for Absolute Position Detection and Feedback. Abstract Several types
Using Magnetic Sensors for Absolute Position Detection and Feedback. Kevin Claycomb University of Evansville Using Magnetic Sensors for Absolute Position Detection and Feedback. Abstract Several types
Airborne. System. today. eter / on a unique. provides: accuracy. Highest absolute. including: cultural features. in a variety.
 GSMP-30A Potassium "SuperSenser" Magnetometer / Gradiometer Airborne System Potassium "SuperSenser" is the most advanced airborne sensor on the market today. To address industry requirements, Terraplus
GSMP-30A Potassium "SuperSenser" Magnetometer / Gradiometer Airborne System Potassium "SuperSenser" is the most advanced airborne sensor on the market today. To address industry requirements, Terraplus
Fast IC Power Transistor with Thermal Protection
 Fast IC Power Transistor with Thermal Protection Introduction Overload protection is perhaps most necessary in power circuitry. This is shown by recent trends in power transistor technology. Safe-area,
Fast IC Power Transistor with Thermal Protection Introduction Overload protection is perhaps most necessary in power circuitry. This is shown by recent trends in power transistor technology. Safe-area,
Advanced Test Equipment Rentals ATEC (2832) CIBANO in-1 test system for medium- and high-voltage circuit breakers
 CIBANO in-1 test system for medium- and high-voltage circuit breakers") Established 1981 Advanced Test Equipment Rentals www.atecorp.com 800-404-ATEC (2832) CIBANO 500 3-in-1 test system for medium- and high-voltage circuit breakers Medium- and high-voltage circuit breaker
Established 1981 Advanced Test Equipment Rentals www.atecorp.com 800-404-ATEC (2832) CIBANO 500 3-in-1 test system for medium- and high-voltage circuit breakers Medium- and high-voltage circuit breaker
DEFINITION OF ILLUMINANCE
 ILLUMINANCE DEFINITION OF ILLUMINANCE The quantity actually measured in photometry is illuminance, the amount of luminous flux incident per unit area. (Some texts refer to this quantity as illumination.)
ILLUMINANCE DEFINITION OF ILLUMINANCE The quantity actually measured in photometry is illuminance, the amount of luminous flux incident per unit area. (Some texts refer to this quantity as illumination.)
understanding real-time traffic information
 understanding real-time traffic information Welcome Congratulations on choosing navigation with SUNA Traffic Channel. SUNA Traffic Channel is a service that broadcasts real-time traffic information directly
understanding real-time traffic information Welcome Congratulations on choosing navigation with SUNA Traffic Channel. SUNA Traffic Channel is a service that broadcasts real-time traffic information directly
TRAINING BULLETIN. EFFECTIVE DATE: 05/06 DOC NO: TB198 CROSS REF: Communications Checklists
 INTRODUCTION Communications Support 131 (CS131) is an important asset of the District and plays a significant role in the county and region. The unit has many communications assets, including radios on
INTRODUCTION Communications Support 131 (CS131) is an important asset of the District and plays a significant role in the county and region. The unit has many communications assets, including radios on
Guide. Installation. Wilson Electronics, Inc. Direct Connection High Power iden Amplifi er 800 MHz Band. Contents:
 Amplifier Installation Guide Direct Connection High Power iden Amplifi er 800 MHz Band Contents: Guarantee and Warranty 1 Before Getting Started / How it Works 3 Installing a Wilson Outside Antenna - In-Vehicle
Amplifier Installation Guide Direct Connection High Power iden Amplifi er 800 MHz Band Contents: Guarantee and Warranty 1 Before Getting Started / How it Works 3 Installing a Wilson Outside Antenna - In-Vehicle
Attitude and Heading Reference Systems
 Attitude and Heading Reference Systems FY-AHRS-2000B Installation Instructions V1.0 Guilin FeiYu Electronic Technology Co., Ltd Addr: Rm. B305,Innovation Building, Information Industry Park,ChaoYang Road,Qi
Attitude and Heading Reference Systems FY-AHRS-2000B Installation Instructions V1.0 Guilin FeiYu Electronic Technology Co., Ltd Addr: Rm. B305,Innovation Building, Information Industry Park,ChaoYang Road,Qi
SST Expert Testimony Common Questions and Answers
 SST Expert Testimony Common Questions and Answers This document is a collection of questions that have commonly been asked about the ShotSpotter system during court testimony and deposition. If possible,
SST Expert Testimony Common Questions and Answers This document is a collection of questions that have commonly been asked about the ShotSpotter system during court testimony and deposition. If possible,
PULSE MATIC 9000 FULL DIGITAL New professional metal detector
 1 PULSE MATIC 9000 FULL DIGITAL New professional metal detector IMPORTANT NOTE: The battery charger of your PULSE MATIC is 110v-240v at 12v. Consequently this battery charger can be plugged in any (AC)
1 PULSE MATIC 9000 FULL DIGITAL New professional metal detector IMPORTANT NOTE: The battery charger of your PULSE MATIC is 110v-240v at 12v. Consequently this battery charger can be plugged in any (AC)
Understanding OpenGL
 This document provides an overview of the OpenGL implementation in Boris Red. About OpenGL OpenGL is a cross-platform standard for 3D acceleration. GL stands for graphics library. Open refers to the ongoing,
This document provides an overview of the OpenGL implementation in Boris Red. About OpenGL OpenGL is a cross-platform standard for 3D acceleration. GL stands for graphics library. Open refers to the ongoing,
In our previous lecture, we understood the vital parameters to be taken into consideration before data acquisition and scanning.
 Interactomics: Protein Arrays & Label Free Biosensors Professor Sanjeeva Srivastava MOOC NPTEL Course Indian Institute of Technology Bombay Module 7 Lecture No 34 Software for Image scanning and data processing
Interactomics: Protein Arrays & Label Free Biosensors Professor Sanjeeva Srivastava MOOC NPTEL Course Indian Institute of Technology Bombay Module 7 Lecture No 34 Software for Image scanning and data processing
Ultrasonic Level Transducer Type: MPUL06 Article No.: ca. 122
 Type: Article No.: 0067720.006 Dimensions ø95 PG7 45.25 16 101 ca. 122 ø53 NPS 2" Figure 1: Ultrasonic Level Transducer Description and application The MPULxx is an ultrasonic transducer used for determining
Type: Article No.: 0067720.006 Dimensions ø95 PG7 45.25 16 101 ca. 122 ø53 NPS 2" Figure 1: Ultrasonic Level Transducer Description and application The MPULxx is an ultrasonic transducer used for determining
SD3-60 AIRCRAFT MAINTENANCE MANUAL SYSTEM - DESCRIPTION & OPERATION (POST MOD A8062)
") AMM 19.0.0.0GYRO COMPASS SYSTEM - DESCRIPTION & OPERATION (POST MOD A8062) 1. General A. The Gyro compass system is a dual installation which provides heading data for: - one flight director system. Refer
AMM 19.0.0.0GYRO COMPASS SYSTEM - DESCRIPTION & OPERATION (POST MOD A8062) 1. General A. The Gyro compass system is a dual installation which provides heading data for: - one flight director system. Refer
Which Dispatch Solution?
 White Paper Which Dispatch Solution? Revision 1.0 www.omnitronicsworld.com Radio Dispatch is a term used to describe the carrying out of business operations over a radio network from one or more locations.
White Paper Which Dispatch Solution? Revision 1.0 www.omnitronicsworld.com Radio Dispatch is a term used to describe the carrying out of business operations over a radio network from one or more locations.
STANDARD OPERATING PROCEDURES SOP:: 2057 PAGE: 1 of 6 REV: 0.0 DATE: 07/11/03
 PAGE: 1 of 6 1.0 SCOPE AND APPLICATION 2.0 METHOD SUMMARY CONTENTS 3.0 SAMPLE PRESERVATION, CONTAINERS, HANDLING, AND STORAGE 4.0 INTERFERENCES AND POTENTIAL PROBLEMS 5.0 EQUIPMENT/APPARATUS 6.0 REAGENTS
PAGE: 1 of 6 1.0 SCOPE AND APPLICATION 2.0 METHOD SUMMARY CONTENTS 3.0 SAMPLE PRESERVATION, CONTAINERS, HANDLING, AND STORAGE 4.0 INTERFERENCES AND POTENTIAL PROBLEMS 5.0 EQUIPMENT/APPARATUS 6.0 REAGENTS
MOTOROLA MOTOTRBO CAPACITY PLUS RADIO SYSTEM DESCRIPTION
 MOTOROLA MOTOTRBO CAPACITY PLUS RADIO SYSTEM DESCRIPTION P a g e 1 North Lawrence Community Schools October 1, 2012 P a g e 2 Table of Contents TABLE OF CONTENTS... 2 GENERAL SYSTEM OVERVIEW... 3 REQUIRED
MOTOROLA MOTOTRBO CAPACITY PLUS RADIO SYSTEM DESCRIPTION P a g e 1 North Lawrence Community Schools October 1, 2012 P a g e 2 Table of Contents TABLE OF CONTENTS... 2 GENERAL SYSTEM OVERVIEW... 3 REQUIRED
PART 2 - ACTUATORS. 6.0 Stepper Motors. 6.1 Principle of Operation
 6.1 Principle of Operation PART 2 - ACTUATORS 6.0 The actuator is the device that mechanically drives a dynamic system - Stepper motors are a popular type of actuators - Unlike continuous-drive actuators,
6.1 Principle of Operation PART 2 - ACTUATORS 6.0 The actuator is the device that mechanically drives a dynamic system - Stepper motors are a popular type of actuators - Unlike continuous-drive actuators,
idocent: Indoor Digital Orientation Communication and Enabling Navigational Technology
 idocent: Indoor Digital Orientation Communication and Enabling Navigational Technology Final Proposal Team #2 Gordie Stein Matt Gottshall Jacob Donofrio Andrew Kling Facilitator: Michael Shanblatt Sponsor:
idocent: Indoor Digital Orientation Communication and Enabling Navigational Technology Final Proposal Team #2 Gordie Stein Matt Gottshall Jacob Donofrio Andrew Kling Facilitator: Michael Shanblatt Sponsor:
Navigation problem. Jussi Suomela
 Navigation problem Define internal navigation sensors for a ground robot with car type kinematics (4 wheels + ackerman steering + rear wheel drive) Sensors? Where? Why? ~ 15-20 min. Describe your system
Navigation problem Define internal navigation sensors for a ground robot with car type kinematics (4 wheels + ackerman steering + rear wheel drive) Sensors? Where? Why? ~ 15-20 min. Describe your system
NavShoe Pedestrian Inertial Navigation Technology Brief
 NavShoe Pedestrian Inertial Navigation Technology Brief Eric Foxlin Aug. 8, 2006 WPI Workshop on Precision Indoor Personnel Location and Tracking for Emergency Responders The Problem GPS doesn t work indoors
NavShoe Pedestrian Inertial Navigation Technology Brief Eric Foxlin Aug. 8, 2006 WPI Workshop on Precision Indoor Personnel Location and Tracking for Emergency Responders The Problem GPS doesn t work indoors
FLOORMAP3Di-R. Twice as Fast Uncompromised Quality
 FLOORMAP3Di-R High Speed MFL Floor Scanner with STARS Top & Bottom Defect Discrimination & MFLi Advanced Defect Analysis Twice as Fast Uncompromised Quality > COMPLETE TANK FLOOR MAPPING > ENHANCED PROBABILITY
FLOORMAP3Di-R High Speed MFL Floor Scanner with STARS Top & Bottom Defect Discrimination & MFLi Advanced Defect Analysis Twice as Fast Uncompromised Quality > COMPLETE TANK FLOOR MAPPING > ENHANCED PROBABILITY
Chapters 1 & 2. Definitions and applications Conceptual basis of photogrammetric processing
 Chapters 1 & 2 Chapter 1: Photogrammetry Definitions and applications Conceptual basis of photogrammetric processing Transition from two-dimensional imagery to three-dimensional information Automation
Chapters 1 & 2 Chapter 1: Photogrammetry Definitions and applications Conceptual basis of photogrammetric processing Transition from two-dimensional imagery to three-dimensional information Automation
RD1000 Ground Probing Radar
 RD1000 Ground Probing Radar CONTENTS Product Introduction Product Features Competitor Analysis Customers Models, Pricing & Availability Promotional Material Practical Demonstration What to do now Summary
RD1000 Ground Probing Radar CONTENTS Product Introduction Product Features Competitor Analysis Customers Models, Pricing & Availability Promotional Material Practical Demonstration What to do now Summary
STX Stair lighting controller.
 Stair lighting controller STX-1792 STX-1792 controller is used to control stairs lighting dynamically. The backlight is switched on with the subsequent steps, depending on the motion directions: ascending
Stair lighting controller STX-1792 STX-1792 controller is used to control stairs lighting dynamically. The backlight is switched on with the subsequent steps, depending on the motion directions: ascending
PRODUCTS. Radios. Accessories As shown, and more GPS. Other PUSH-TO-TALK OVER CELLULAR. Heavy Duty, Bluetooth and Smart Digital Headsets.
 PRODUCTS Radios PUSH-TO-TALK OVER CELLULAR Accessories As shown, and more Long Range Microphone Chest Packs Heavy Duty, Bluetooth and Smart Digital Headsets Noise-Cancelling Speaker Microphone IMPRES Battery
PRODUCTS Radios PUSH-TO-TALK OVER CELLULAR Accessories As shown, and more Long Range Microphone Chest Packs Heavy Duty, Bluetooth and Smart Digital Headsets Noise-Cancelling Speaker Microphone IMPRES Battery
TRAFFIC ACCIDENT STUDY GUIDE 2003
 TRAFFIC ACCIDENT STUDY GUIDE 2003 SECTION TWO This study guide is designed to provide the law enforcement Explorer with basic principles. The guide is not all inclusive, and does not delineate specific
TRAFFIC ACCIDENT STUDY GUIDE 2003 SECTION TWO This study guide is designed to provide the law enforcement Explorer with basic principles. The guide is not all inclusive, and does not delineate specific
Telemetrie-Messtechnik Schnorrenberg
 Telemetrie-Messtechnik Schnorrenberg CT16-Wheel User manual TMS Telemetrie-Messtechnik Schnorrenberg Dipl.-Ing. Werner Schnorrenberg Habichtweg 30, D-51429 Bergisch Gladbach, Tel: 02204-9815-52, Fax: 02204-9815-53,
Telemetrie-Messtechnik Schnorrenberg CT16-Wheel User manual TMS Telemetrie-Messtechnik Schnorrenberg Dipl.-Ing. Werner Schnorrenberg Habichtweg 30, D-51429 Bergisch Gladbach, Tel: 02204-9815-52, Fax: 02204-9815-53,
E61, E63, E64, E70, E87, E90, E91, E92, E93, R56 BMW AG - TIS
 VS-42 je Baugruppe/Group: 84 84 06 03 (053) Car Communication Computer E60, E61, E63, E64, E70, E87, E90, E91, E92, E93, R56 weltweit Datum/Date: 11/2003 Update: 11/2006 Introduction The Car Communication
VS-42 je Baugruppe/Group: 84 84 06 03 (053) Car Communication Computer E60, E61, E63, E64, E70, E87, E90, E91, E92, E93, R56 weltweit Datum/Date: 11/2003 Update: 11/2006 Introduction The Car Communication
TECHNICAL INFORMATION Traffic Template Catalog No. TT1
 Copyright 2016 by SIRCHIE All Rights Reserved. TECHNICAL INFORMATION Traffic Template Catalog No. TT1 INTRODUCTION Your SIRCHIE Traffic Template is a versatile police tool designed to make even the most
Copyright 2016 by SIRCHIE All Rights Reserved. TECHNICAL INFORMATION Traffic Template Catalog No. TT1 INTRODUCTION Your SIRCHIE Traffic Template is a versatile police tool designed to make even the most
Contents Package Contents... 3 Introduction... 4 Using Your Computer... 6
 1 Contents Package Contents... 3 Introduction... 4 Using Your Computer... 6 1.Main Unit Setup... 6 1. Initiation of Main Unit 2. Basic Display Modes 2. Overview of Button Operation... 8 1. In Data Setting
1 Contents Package Contents... 3 Introduction... 4 Using Your Computer... 6 1.Main Unit Setup... 6 1. Initiation of Main Unit 2. Basic Display Modes 2. Overview of Button Operation... 8 1. In Data Setting
Sketch technique. Introduction
 Sketch technique Introduction Although we all like to see and admire well crafted illustrations, as a professional designer you will find that these constitute a small percentage of the work you will produce.
Sketch technique Introduction Although we all like to see and admire well crafted illustrations, as a professional designer you will find that these constitute a small percentage of the work you will produce.
Number Plate Recognition Using Segmentation
 Number Plate Recognition Using Segmentation Rupali Kate M.Tech. Electronics(VLSI) BVCOE. Pune 411043, Maharashtra, India. Dr. Chitode. J. S BVCOE. Pune 411043 Abstract Automatic Number Plate Recognition
Number Plate Recognition Using Segmentation Rupali Kate M.Tech. Electronics(VLSI) BVCOE. Pune 411043, Maharashtra, India. Dr. Chitode. J. S BVCOE. Pune 411043 Abstract Automatic Number Plate Recognition
metro B6012 VIBRATIONS SIMPLIFIED... Product brochure Easiest portable vibration analyzer and balancer TECHNOLOGIES PVT. LTD.
 metro B6012 VIBRATIONS SIMPLIFIED... Product brochure Easiest portable vibration analyzer and balancer TECHNOLOGIES PVT. LTD. Product brocure 1 is reliable, fast and easiest to use tool designed for routine
metro B6012 VIBRATIONS SIMPLIFIED... Product brochure Easiest portable vibration analyzer and balancer TECHNOLOGIES PVT. LTD. Product brocure 1 is reliable, fast and easiest to use tool designed for routine
Overview Installation & Connection Mounting
 Overview The Keene K-LAB-20 is compact, powerful stereo amplifier built onto a standard size UK double gang wall plate. It provides 20W (RMS per channel) of amplification eliminating the need to make space
Overview The Keene K-LAB-20 is compact, powerful stereo amplifier built onto a standard size UK double gang wall plate. It provides 20W (RMS per channel) of amplification eliminating the need to make space
VIRTUAL REALITY FOR NONDESTRUCTIVE EVALUATION APPLICATIONS
 VIRTUAL REALITY FOR NONDESTRUCTIVE EVALUATION APPLICATIONS Jaejoon Kim, S. Mandayam, S. Udpa, W. Lord, and L. Udpa Department of Electrical and Computer Engineering Iowa State University Ames, Iowa 500
VIRTUAL REALITY FOR NONDESTRUCTIVE EVALUATION APPLICATIONS Jaejoon Kim, S. Mandayam, S. Udpa, W. Lord, and L. Udpa Department of Electrical and Computer Engineering Iowa State University Ames, Iowa 500
TOY TRUCK. Figure 1. Orthographic projections of project.
 TOY TRUCK Prepared by: Harry Hawkins The following project is of a small, wooden toy truck. This exercise will provide you with the procedure for constructing the various parts of the design then assembling
TOY TRUCK Prepared by: Harry Hawkins The following project is of a small, wooden toy truck. This exercise will provide you with the procedure for constructing the various parts of the design then assembling
The physics of capacitive touch technology
 The physics of capacitive touch technology By Tom Perme Applications Engineer Microchip Technology Inc. Introduction Understanding the physics of capacitive touch technology makes it easier to choose the
The physics of capacitive touch technology By Tom Perme Applications Engineer Microchip Technology Inc. Introduction Understanding the physics of capacitive touch technology makes it easier to choose the
AUDIO SYSTEMS 8F - 1 AUDIO SYSTEMS CONTENTS
 TJ AUDIO SYSTEMS 8F - 1 AUDIO SYSTEMS CONTENTS page GENERAL INFORMATION INTRODUCTION... 1 DESCRIPTION AND OPERATION ANTENNA... 1 IGNITION-OFF DRAW FUSE... 1 RADIO... 1 RADIO NOISE SUPPRESSION... 2 SPEAKER...
TJ AUDIO SYSTEMS 8F - 1 AUDIO SYSTEMS CONTENTS page GENERAL INFORMATION INTRODUCTION... 1 DESCRIPTION AND OPERATION ANTENNA... 1 IGNITION-OFF DRAW FUSE... 1 RADIO... 1 RADIO NOISE SUPPRESSION... 2 SPEAKER...
Analog Inputs and Outputs
 Analog Inputs and Outputs PLCs must also work with continuous or analog signals. Typical analog signals are 0-10 VDC or 4-20 ma. Analog signals are used to represent changing values such as speed, temperature,
Analog Inputs and Outputs PLCs must also work with continuous or analog signals. Typical analog signals are 0-10 VDC or 4-20 ma. Analog signals are used to represent changing values such as speed, temperature,
DAI. Connecting Analog and Frequency Fuel Level Sensors
 DAI. Connecting Analog and Frequency Fuel Level Sensors User Manual www.galileosky.com Contents Necessary Tools, Devices, Materials... 3 General Information... 4 Fuel Level Sensor Connection... 5 Connection
DAI. Connecting Analog and Frequency Fuel Level Sensors User Manual www.galileosky.com Contents Necessary Tools, Devices, Materials... 3 General Information... 4 Fuel Level Sensor Connection... 5 Connection
FPGA Laboratory Assignment 5. Due Date: 26/11/2012
 FPGA Laboratory Assignment 5 Due Date: 26/11/2012 Aim The purpose of this lab is to help you understand the fundamentals image processing. Objectives Learn how to implement image processing operations
FPGA Laboratory Assignment 5 Due Date: 26/11/2012 Aim The purpose of this lab is to help you understand the fundamentals image processing. Objectives Learn how to implement image processing operations
2004 Cadillac Escalade/Escalade ESV and Escalade EXT Navigation System M
 2004 Cadillac Escalade/Escalade ESV and Escalade EXT Navigation System M Overview... 1-1 Overview... 1-2 Features and Controls... 2-1 Features and Controls... 2-2 Navigation Audio System... 3-1 Navigation
2004 Cadillac Escalade/Escalade ESV and Escalade EXT Navigation System M Overview... 1-1 Overview... 1-2 Features and Controls... 2-1 Features and Controls... 2-2 Navigation Audio System... 3-1 Navigation
BUYERS GUIDE: Pop Up Stands
 0844 800 1020 BUYERS GUIDE: Pop Up Stands What is a Pop Up Stand A lightweight portable display system popular with the exhibition and retail markets. Pop Up Stand Sizes Pop up stands traditionally have
0844 800 1020 BUYERS GUIDE: Pop Up Stands What is a Pop Up Stand A lightweight portable display system popular with the exhibition and retail markets. Pop Up Stand Sizes Pop up stands traditionally have
Team Autono-Mo. Jacobia. Department of Computer Science and Engineering The University of Texas at Arlington
 Department of Computer Science and Engineering The University of Texas at Arlington Team Autono-Mo Jacobia Architecture Design Specification Team Members: Bill Butts Darius Salemizadeh Lance Storey Yunesh
Department of Computer Science and Engineering The University of Texas at Arlington Team Autono-Mo Jacobia Architecture Design Specification Team Members: Bill Butts Darius Salemizadeh Lance Storey Yunesh
GPS positioning using map-matching algorithms, drive restriction information and road network connectivity
 Extended abstract Submission for GISRUK 2001 GPS positioning using map-matching algorithms, drive restriction information and road network connectivity George Taylor 1, Jamie Uff 2 and Adil Al-Hamadani
Extended abstract Submission for GISRUK 2001 GPS positioning using map-matching algorithms, drive restriction information and road network connectivity George Taylor 1, Jamie Uff 2 and Adil Al-Hamadani
Increasing Broadcast Reliability for Vehicular Ad Hoc Networks. Nathan Balon and Jinhua Guo University of Michigan - Dearborn
 Increasing Broadcast Reliability for Vehicular Ad Hoc Networks Nathan Balon and Jinhua Guo University of Michigan - Dearborn I n t r o d u c t i o n General Information on VANETs Background on 802.11 Background
Increasing Broadcast Reliability for Vehicular Ad Hoc Networks Nathan Balon and Jinhua Guo University of Michigan - Dearborn I n t r o d u c t i o n General Information on VANETs Background on 802.11 Background
Non-Contact Sensing Reduces Wear, Breakage, Downtime, and Ultimately, Cost
 TURCK Linear Displacement Transducers TURCK introduces a new line of linear displacement transducers (LDTs) called EZ-Track. EZ-Track is the latest offering in TURCK s continuous effort to change the shape
TURCK Linear Displacement Transducers TURCK introduces a new line of linear displacement transducers (LDTs) called EZ-Track. EZ-Track is the latest offering in TURCK s continuous effort to change the shape
Instruction Manual for HyperScan Spectrometer
 August 2006 Version 1.1 Table of Contents Section Page 1 Hardware... 1 2 Mounting Procedure... 2 3 CCD Alignment... 6 4 Software... 7 5 Wiring Diagram... 19 1 HARDWARE While it is not necessary to have
August 2006 Version 1.1 Table of Contents Section Page 1 Hardware... 1 2 Mounting Procedure... 2 3 CCD Alignment... 6 4 Software... 7 5 Wiring Diagram... 19 1 HARDWARE While it is not necessary to have
Geotagger N3. User Manual (V1.0) Revised by Geosolve.be (Pol F. Gillard) with personal updates and help. Solmeta Technology Co.
 Revised by Geosolve.be (Pol F. Gillard) with personal updates and help. Solmeta Technology Co.") Geotagger N3 User Manual (V1.0) Revised by Geosolve.be (Pol F. Gillard) with personal updates and help Solmeta Technology Co., Ltd Copyright 2011 Solmeta Technology Co., Ltd. All Rights Reserved 1 Contents
Geotagger N3 User Manual (V1.0) Revised by Geosolve.be (Pol F. Gillard) with personal updates and help Solmeta Technology Co., Ltd Copyright 2011 Solmeta Technology Co., Ltd. All Rights Reserved 1 Contents
SP-6 magnetometer. User manual. Installation and in-flight calibration
 SP-6 magnetometer User manual Installation and in-flight calibration Note: This manual is applicable for SP-6 systems that contain in-flight calibration firmware released by MGL Avionics around the 15
SP-6 magnetometer User manual Installation and in-flight calibration Note: This manual is applicable for SP-6 systems that contain in-flight calibration firmware released by MGL Avionics around the 15
Goals. Introduction. To understand the use of root mean square (rms) voltages and currents.
 voltages and currents.") Lab 10. AC Circuits Goals To show that AC voltages cannot generally be added without accounting for their phase relationships. That is, one must account for how they vary in time with respect to one another.
Lab 10. AC Circuits Goals To show that AC voltages cannot generally be added without accounting for their phase relationships. That is, one must account for how they vary in time with respect to one another.
LaGrange Amateur Radio Club Coordinated RF Search and Rescue Procedures
 LaGrange Amateur Radio Club Coordinated RF Search and Rescue Procedures Created by Lee Becham KD4NTS February 2, 2009 2 Overview... 3 Minimum Requirements... 3 Basic Procedure... 3 Practical and Tactical...
LaGrange Amateur Radio Club Coordinated RF Search and Rescue Procedures Created by Lee Becham KD4NTS February 2, 2009 2 Overview... 3 Minimum Requirements... 3 Basic Procedure... 3 Practical and Tactical...
>>> RALLY SAFETY SYSTEM
 >>> RALLY SAFETY SYSTEM Rally Safety System Complete rally monitoring system based on GPS and GLONASS satellite positioning technology, GPRS data transfer and advanced cloud server data processing. Online
>>> RALLY SAFETY SYSTEM Rally Safety System Complete rally monitoring system based on GPS and GLONASS satellite positioning technology, GPRS data transfer and advanced cloud server data processing. Online
Modular Bi-File Lateral
 Modular Bi-File Lateral Installation Instructions 920-563-6362 E-mail: ssc@spacesaver.com Internet: www.spacesaver.com Contents Hardware Identification..................................3 Pre-Installation........................................6
Modular Bi-File Lateral Installation Instructions 920-563-6362 E-mail: ssc@spacesaver.com Internet: www.spacesaver.com Contents Hardware Identification..................................3 Pre-Installation........................................6
Technical Notes LAND MAPPING APPLICATIONS. Leading the way with increased reliability.
 LAND MAPPING APPLICATIONS Technical Notes Leading the way with increased reliability. Industry-leading post-processing software designed to maximize the accuracy potential of your POS LV (Position and
LAND MAPPING APPLICATIONS Technical Notes Leading the way with increased reliability. Industry-leading post-processing software designed to maximize the accuracy potential of your POS LV (Position and
Primer on GPS Operations
 MP Rugged Wireless Modem Primer on GPS Operations 2130313 Rev 1.0 Cover illustration by Emma Jantz-Lee (age 11). An Introduction to GPS This primer is intended to provide the foundation for understanding
MP Rugged Wireless Modem Primer on GPS Operations 2130313 Rev 1.0 Cover illustration by Emma Jantz-Lee (age 11). An Introduction to GPS This primer is intended to provide the foundation for understanding
4. BASIC OPERATION AND DESCRIPTION
 3. FEATURES Rugged high-impact plastic enclosure with aluminum sensor pole Powerful magnetic speaker with waterproof Mylar cone Lightweight, comfortably balanced for easy handling Easy view LCD display
3. FEATURES Rugged high-impact plastic enclosure with aluminum sensor pole Powerful magnetic speaker with waterproof Mylar cone Lightweight, comfortably balanced for easy handling Easy view LCD display
WHITE PAPER BENEFITS OF OPTICOM GPS. Upgrading from Infrared to GPS Emergency Vehicle Preemption GLOB A L TRAFFIC TE CHNOLOGIE S
 WHITE PAPER BENEFITS OF OPTICOM GPS Upgrading from Infrared to GPS Emergency Vehicle Preemption GLOB A L TRAFFIC TE CHNOLOGIE S 2 CONTENTS Overview 3 Operation 4 Advantages of Opticom GPS 5 Opticom GPS
WHITE PAPER BENEFITS OF OPTICOM GPS Upgrading from Infrared to GPS Emergency Vehicle Preemption GLOB A L TRAFFIC TE CHNOLOGIE S 2 CONTENTS Overview 3 Operation 4 Advantages of Opticom GPS 5 Opticom GPS
ENVI.2030L Topographic Maps and Profiles
 Name ENVI.2030L Topographic Maps and Profiles I. Introduction A map is a miniature representation of a portion of the earth's surface as it appears from above. The environmental scientist uses maps as
Name ENVI.2030L Topographic Maps and Profiles I. Introduction A map is a miniature representation of a portion of the earth's surface as it appears from above. The environmental scientist uses maps as
www. ElectricalPartManuals. com Transformer Differential Relay MD32T Transformer Differential Relay
 Transformer Differential Relay The MD3T Transformer Differential Relay is a member of Cooper Power Systems Edison line of microprocessor based protective relays. The MD3T relay offers the following functions:
Transformer Differential Relay The MD3T Transformer Differential Relay is a member of Cooper Power Systems Edison line of microprocessor based protective relays. The MD3T relay offers the following functions:
Variable Message Sign Trailers
 Variable Message Sign Trailers Frequently Asked Questions 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. 14. 15. 16. 17. 18. 19. 20. 21. 22. 23. 24. 25. 26. 27. 28. 29. 30. 31. 32. What standard are the VMS
Variable Message Sign Trailers Frequently Asked Questions 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. 14. 15. 16. 17. 18. 19. 20. 21. 22. 23. 24. 25. 26. 27. 28. 29. 30. 31. 32. What standard are the VMS
APPENDIX E INSTRUMENT VERIFICATION STRIP REPORT. Final Remedial Investigation Report for the Former Camp Croft Spartanburg, South Carolina Appendices
 Final Remedial Investigation Report for the Former Camp Croft APPENDIX E INSTRUMENT VERIFICATION STRIP REPORT Contract No.: W912DY-10-D-0028 Page E-1 Task Order No.: 0005 Final Remedial Investigation Report
Final Remedial Investigation Report for the Former Camp Croft APPENDIX E INSTRUMENT VERIFICATION STRIP REPORT Contract No.: W912DY-10-D-0028 Page E-1 Task Order No.: 0005 Final Remedial Investigation Report
MacroPATH The new line of Digital Imaging Systems for Grossing
 MILESTONE H E L P I N G P A T I E N T S MacroPATH The new line of Digital Imaging Systems for Grossing If the dimensions of the specimen are not recorded, the key section not taken, and the proper special
MILESTONE H E L P I N G P A T I E N T S MacroPATH The new line of Digital Imaging Systems for Grossing If the dimensions of the specimen are not recorded, the key section not taken, and the proper special
March 10, Greenbelt Road, Suite 400, Greenbelt, MD Tel: (301) Fax: (301)
 Fax: (301)") Detection of High Risk Intersections Using Synthetic Machine Vision John Alesse, john.alesse.ctr@dot.gov Brian O Donnell, brian.odonnell.ctr@dot.gov Stinger Ghaffarian Technologies, Inc. Cambridge, Massachusetts
Detection of High Risk Intersections Using Synthetic Machine Vision John Alesse, john.alesse.ctr@dot.gov Brian O Donnell, brian.odonnell.ctr@dot.gov Stinger Ghaffarian Technologies, Inc. Cambridge, Massachusetts
AC/DC Current Probe CT6844/CT6845/CT6846
 1 Abstract The AC/DC Current Probe CT6844/CT6845/ CT6846 is a clamp on current sensor with a broad frequency range that starts from DC, a broad operating temperature range, and the ability to measure currents
1 Abstract The AC/DC Current Probe CT6844/CT6845/ CT6846 is a clamp on current sensor with a broad frequency range that starts from DC, a broad operating temperature range, and the ability to measure currents
2005 Pontiac Vibe Navigation System M
 2005 Pontiac Vibe Navigation System M Overview... 1-1 Overview... 1-2 Features and Controls... 2-1 Features and Controls... 2-2 Navigation Audio System... 3-1 Navigation Audio System... 3-2 Index... 1
2005 Pontiac Vibe Navigation System M Overview... 1-1 Overview... 1-2 Features and Controls... 2-1 Features and Controls... 2-2 Navigation Audio System... 3-1 Navigation Audio System... 3-2 Index... 1
SLE30 Expert Series Teach-Mode Slot Sensor
 SLE30 Expert Series Teach-Mode Slot Sensor Self-contained opposed-mode sensor pair with Teach Mode SLE30 Expert Series Slot Sensor Features An easy-to-use, self-contained opposed-mode sensor pair in a
SLE30 Expert Series Teach-Mode Slot Sensor Self-contained opposed-mode sensor pair with Teach Mode SLE30 Expert Series Slot Sensor Features An easy-to-use, self-contained opposed-mode sensor pair in a
An Autonomous Vehicle Navigation System using Panoramic Machine Vision Techniques
 An Autonomous Vehicle Navigation System using Panoramic Machine Vision Techniques Kevin Rushant, Department of Computer Science, University of Sheffield, GB. email: krusha@dcs.shef.ac.uk Libor Spacek,
An Autonomous Vehicle Navigation System using Panoramic Machine Vision Techniques Kevin Rushant, Department of Computer Science, University of Sheffield, GB. email: krusha@dcs.shef.ac.uk Libor Spacek,