AutoBench 1.1. software benchmark data book.
|
|
|
- Gwenda Terry
- 5 years ago
- Views:
Transcription

1 AutoBench 1.1 software benchmark data book
2 Table of Contents Angle to Time Conversion...2 Basic Integer and Floating Point...4 Bit Manipulation...5 Cache Buster...6 CAN Remote Data Request...7 Fast Fourier Transform (FFT)...9 Finite Impulse Response (FIR) Filter Inverse Fast Fourier Transform (ifft) Infinite Impulse Response (IIR) Filter Matrix Arithmetic Pointer Chasing Pulse Width Modulation (PWM) Road Speed Calculation Table Lookup and Interpolation Tooth to Spark
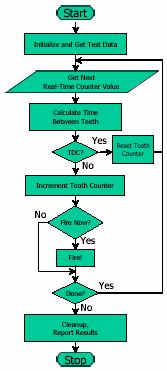
3 Name: Angle to Time Conversion This EEMBC benchmark simulates an embedded automotive application where the CPU reads a counter which measures the real-time delay between pulses sensed from a toothed wheel (gear) on the crankshaft of an engine. Then the CPU determines the Top Dead Center (TDC) position on the crankshaft, computes the engine speed, and provides a conversion from the tooth wheel pulses to precise crankshaft angle position. This value is expressed in linear time from TDC. The tooth wheel pulses actually represent crankshaft angle, and the delay between pulses yields angular velocity of the crankshaft (engine speed). The kernel starts each pass of the loop by reading a previous real-time counter value from the test data file. The previous counter value is subtracted from the current counter value to determine the time between teeth edges. As long as the CPU does not detect TDC, the tooth pulse counter is incremented, and indicates progress through a crankshaft revolution. As the tooth pulse counter increments, each cylinder is fired in turn once its firing angle (tooth number) is reached. At each cylinder firing a precise firing time is issued to some external hardware counter. Detection of the next TDC causes the tonewheel tooth counter to be reset to zero, and the entire process begins again. Intrinsics/ (page 2) 2
4 3
 function using the telescoping series: arctan(x) = x * P(x^2) / Q(x^2) where P and Q are polynomials, and x is assumed to be in the range from 0 to tan(pi/4).")
5 Name: Basic Integer and Floating Point This EEMBC benchmark algorithm measures basic integer and floating point capabilities. The benchmark calculates the arctan(x) function using the telescoping series: arctan(x) = x * P(x^2) / Q(x^2) where P and Q are polynomials, and x is assumed to be in the range from 0 to tan(pi/4). The benchmark limits the input domain to ensure this condition is met and adjusts any output values which correspond to limited input values so that the correct result is always obtained. Intrinsics/ 4

6 Name: Bit Manipulation This EEMBC benchmark simulates an embedded automotive/industrial application where large numbers of bits have to be manipulated, many decisions have to be taken based upon bit values and bit arithmetic takes place. The kernel simulates part of a character display system where characters are shifted into a line buffer. The line buffer is then converted into a series of pixels by mapping characters through a display character ROM. The pixels are moved into a display buffer until the entire buffer is displayed. Intrinsics/ 5
7 Name: Cache Buster This EEMBC benchmark simulates an embedded automotive/industrial application without a cache. It highlights performance in those situations when long sections of control code are executed with very little backwards branching or revisiting of the same data. Processors which utilize look ahead mechanisms rather than caches should perform well here. The kernel uses an intricate algorithm involving data and function pointers to ensure that data and code locality does not occur during execution. Intrinsics/ 6
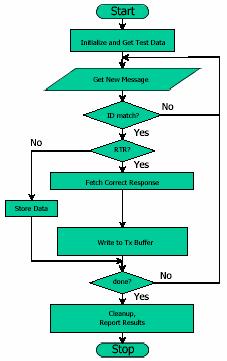
8 Name: CAN Remote Data Request This EEMBC benchmark simulates an embedded automotive application where a Controller Area Network (CAN) interface node exists for exchanging messages across the system. The situation being simulated is that which occurs when a Remote Data Request (RDR) message is received by all nodes. Every node must check the identifier of the message to see if they own that type of data. If yes, then the responsible node must gather the data and transmit it back onto the network for the originator of the RDR. The kernel fetches received messages from a simulated receiver buffer, checks the identification (ID) field and ignores those messages which it is not interested in. Interesting messages are then usually stored, unless they are a RDR message,. In this case the data associated with the ID is sought and then placed into a simulated transmit buffer for sending back to the originator. Intrinsics/ (page 7) 7
9 8
 on complex input values stored in real and imaginary arrays.")
10 Name: Fast Fourier Transform (FFT) This EEMBC benchmark simulates an embedded automotive/industrial application performing a power spectrum analysis of a time varying input waveform. The kernel computes the radix-2 decimation in frequency Fast Fourier Transform (FFT) on complex input values stored in real and imaginary arrays. After the time domain values are converted to the equivalent frequency domain, the power spectrum is calculated. Intrinsics/ 9
11 Name: Finite Impulse Response (FIR) Filter This EEMBC benchmark algorithm simulates an embedded automotive/industrial application where the CPU performs a Finite Impulse Response (FIR) filtering sample on 16-bit or 32-bit fixed-point values. Highand low-pass FIR filters simply process the input signal data. Intrinsics/ 10
 on an input data matrix set using 64-bit integer arithmetic.")
12 Name: Inverse Discrete Cosine Transform (idct) This EEMBC benchmark simulates an embedded automotive/industrial application performing digital video and graphics applications such as image recognition. The kernel performs an inverse discrete cosine transform (idct) on an input data matrix set using 64-bit integer arithmetic. Intrinsics/ 11
13 Automotive/Industrial Subcommittee Name: Inverse Fast Fourier Transform (ifft) This EEMBC benchmark simulates an embedded automotive/industrial application analysis of a time domain analysis of an input frequency spectrum. This might be used in noise cancellation applications. The kernel computes the radix-2 decimation in frequency inverse Fast Fourier Transform (FFT) on complex input values stored in real and imaginary arrays. Intrinsics/ 12
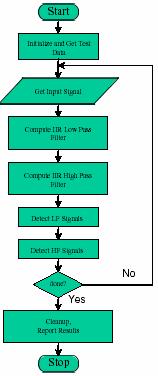
14 Name: Infinite Impulse Response (IIR) Filter This Embedded Microprocessor Consortium (EEMBC) benchmark algorithm simulates an embedded automotive/industrial application where the CPU performs an Infinite Impulse Response (IIR) filtering sample on 16- bit or 32-bit fixed-point values. It implements a Direct-Form II N-cascaded, second-order IIR filter. IIR filters can often be more efficient that FIR filters, in terms of attaining better magnitude response with a given filter order. This is because IIR filters incorporate feedback and are capable of realizing both poles and zeros of a system, whereas FIR filters are not capable of realizing the zeros. The difference equation for a Direct Form II N-Cascaded Direct second-order IIR filter is: {u(n) = x(n) + a(1)*x(n-1) + a(2)*x(n-2), {y(n) = b(0)*u(n) + b(1)*u(n-1) + b(2)*u(n-2); where: x(n) = input signal of the biquad at time n u(n) = state variable of the biquad at time n y(n) = output signal of the biquad at time n a(n), b(n) = coefficients of the biquad High- and low-pass IIR filters process the input signal data. Binary comparators also digitize the outputs of the filters. This IIR filter benchmark explores a CPU s ability to perform multiply-accumulates and rounding. It employs typical DSP functions that would replace an analog signal chain comprised of op-amps and comparators. Intrinsics/ (page 13) 13
15 14
16 Name: Matrix Arithmetic This EEMBC benchmark simulates an embedded automotive/industrial application which performs a lot of matrix arithmetic. The kernel performs an LU decomposition on n x n input matrices. It also computes the determinant of the input matrix then a cross product with a second matrix. Intrinsics/ 15
17 Name: Pointer Chasing This EEMBC benchmark simulates an embedded automotive/industrial application which performs a lot of pointer manipulation. The kernel employs a doubly linked list then searches the list for entries which match an input token. A large set of input tokens is used to exercise the entire list. The number of steps taken to find each input token is recorded. Intrinsics/ 16
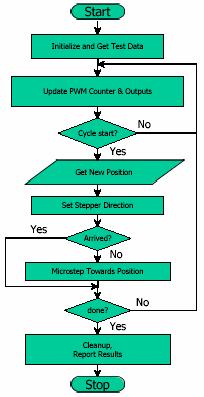
18 Name: Pulse Width Modulation (PWM) This EEMBC benchmark simulates an application in which an actuator is driven by a PWM signal proportional to some input. Specifically, the algorithm presumes that the embedded processor is driving an H-bridge motor driver with both direction and enable signals. Outputs are provided for two such H-bridge drivers, as might be used for a bipolar stepper motor driver, or proportional DC motor driver. The stepper motor is controlling the position of the actuator. We can control it by passing a desired position command to the algorithm, and let the algorithm control moving the motor to that position. On each pass, the algorithm simulates the PWM signals and checks to see if the motor has reached the commanded position once per PWM cycle. By providing the stepper motor with phasing signals as well as PWM control of each phase, the motor can be micro-stepped to provide finer resolution and smoother motion. The phase control provides direction signals for energizing each of the stepper motor coils in a typical bipolar full-step sequence. The algorithm could be used in applications with actuators other than stepper motors, making use of just the PWM feature without the phasing control, in which case the PWM signals would provide proportional velocity control, while the phase signals would provide motor direction. Intrinsics/ (page 17) 17
19 18
20 Name: Road Speed Calculation This EEMBC benchmark simulates an automotive application where the CPU repeatedly calculates the road speed based on differences between timer counter values. All values are filtered to minimize errors due to noise. The calculation involves straight-forward arithmetic, but must also deal with the situation when the timer counter rolls over; or when the measurement results show abrupt changes. At zero road speed, the application has to ensure that it does not infinitely wait for a counter increment. The benchmark has a mix of arithmetic and flow control routines. The arithmetic portion involves add, subtract, multiply and divide. For low end microcontrollers, the arithmetic capability may become a performance bottleneck. For higher end processors, the pipeline efficiency may be more important than raw performance since there are a significant number of compare and branch instructions (i.e. flow control). A processor that is good in both aspects will shine with this kind of benchmark. Intrinsics/ (page 19) 19
21 20
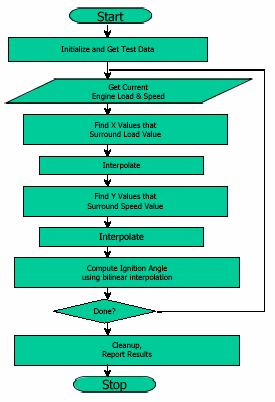
22 Name: Table Lookup and Interpolation This EEMBC benchmark algorithm is used in engine controllers, anti-lock brake systems, and other applications to access constant data quicker than by raw calculation. Instead of storing all data points, which would consume a lot of memory, selective data points are stored and the software then interpolates between them. Data may be stored in 2 dimensional (,Y) or 3 dimensional (,Y,Z) tables. For example, software periodically performs a table lookup process to derive an output value Ignition Angle from two input variables, Engine Load and Engine Speed. The engine control continuously derives the input variables, Load and Speed, from external engine sensors. Speed is derived by measuring the period between pulses from magnetic pickup sensing gear teeth on the crankshaft. Load is derived from sensors measuring air flow through the throttle body. The bilinear interpolation technique determines values by using four points in a grid that surrounds the desired point. This algorithm simulates engine load and speed which are indices into an angle table. The engine load () and engine speed (Y) values are calculated and normalized. The ignition angle (Z) value is then interpolated from the table. Intrinsics/ (page 21) 21
23 22
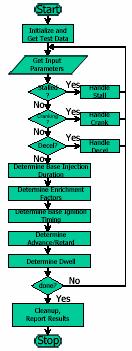
24 Name: Tooth to Spark This EEMBC benchmark simulates an automotive application where the CPU controls fuel injection and ignition in the engine combustion process. Toothto-Spark, part of an Engine Control Unit (ECU), performs real-time processing of air/fuel mixture and ignition timing. Based on the operating conditions presented to the ECU, the CPU adjusts the output values for fuel injector duration and ignition timing from nominal values on each pass. The ECU determines whether the engine is running or not, and enables the fuel pump and igniters accordingly. While the engine is being started, the ECU performs special fuel injection duration and spark timing to optimize starting conditions. Once the engine is running, the CPU processes the output variables for injector and igniter timing on each pass. The CPU primarily makes adjustments according to the engine speed/load parameters, but also makes lesser adjustments for other variables. The entire process is repeated on each pass, taking input values from the test data and computing new output values. The input test data can reside in ROM or RAM, so comparisons can be made for performance from either memory source. Intrinsics/ (page 23) 23
25 24
Digital Signal Processing. VO Embedded Systems Engineering Armin Wasicek WS 2009/10
 Digital Signal Processing VO Embedded Systems Engineering Armin Wasicek WS 2009/10 Overview Signals and Systems Processing of Signals Display of Signals Digital Signal Processors Common Signal Processing
Digital Signal Processing VO Embedded Systems Engineering Armin Wasicek WS 2009/10 Overview Signals and Systems Processing of Signals Display of Signals Digital Signal Processors Common Signal Processing
Problem Point Value Your score Topic 1 28 Filter Analysis 2 24 Filter Implementation 3 24 Filter Design 4 24 Potpourri Total 100
 The University of Texas at Austin Dept. of Electrical and Computer Engineering Midterm #1 Date: March 8, 2013 Course: EE 445S Evans Name: Last, First The exam is scheduled to last 50 minutes. Open books
The University of Texas at Austin Dept. of Electrical and Computer Engineering Midterm #1 Date: March 8, 2013 Course: EE 445S Evans Name: Last, First The exam is scheduled to last 50 minutes. Open books
Real-time Math Function of DL850 ScopeCorder
 Real-time Math Function of DL850 ScopeCorder Etsurou Nakayama *1 Chiaki Yamamoto *1 In recent years, energy-saving instruments including inverters have been actively developed. Researchers in R&D sections
Real-time Math Function of DL850 ScopeCorder Etsurou Nakayama *1 Chiaki Yamamoto *1 In recent years, energy-saving instruments including inverters have been actively developed. Researchers in R&D sections
Subra Ganesan DSP 1.
 DSP 1 Subra Ganesan Professor, Computer Science and Engineering Associate Director, Product Development and Manufacturing Center, Oakland University, Rochester, MI 48309 Email: ganesan@oakland.edu Topics
DSP 1 Subra Ganesan Professor, Computer Science and Engineering Associate Director, Product Development and Manufacturing Center, Oakland University, Rochester, MI 48309 Email: ganesan@oakland.edu Topics
Digital Signal Processing
 Digital Signal Processing System Analysis and Design Paulo S. R. Diniz Eduardo A. B. da Silva and Sergio L. Netto Federal University of Rio de Janeiro CAMBRIDGE UNIVERSITY PRESS Preface page xv Introduction
Digital Signal Processing System Analysis and Design Paulo S. R. Diniz Eduardo A. B. da Silva and Sergio L. Netto Federal University of Rio de Janeiro CAMBRIDGE UNIVERSITY PRESS Preface page xv Introduction
RTTY: an FSK decoder program for Linux. Jesús Arias (EB1DIX)
") RTTY: an FSK decoder program for Linux. Jesús Arias (EB1DIX) June 15, 2001 Contents 1 rtty-2.0 Program Description. 2 1.1 What is RTTY........................................... 2 1.1.1 The RTTY transmissions.................................
RTTY: an FSK decoder program for Linux. Jesús Arias (EB1DIX) June 15, 2001 Contents 1 rtty-2.0 Program Description. 2 1.1 What is RTTY........................................... 2 1.1.1 The RTTY transmissions.................................
Computer Numeric Control
 Computer Numeric Control TA202A 2017-18(2 nd ) Semester Prof. J. Ramkumar Department of Mechanical Engineering IIT Kanpur Computer Numeric Control A system in which actions are controlled by the direct
Computer Numeric Control TA202A 2017-18(2 nd ) Semester Prof. J. Ramkumar Department of Mechanical Engineering IIT Kanpur Computer Numeric Control A system in which actions are controlled by the direct
DESIGN OF A TWO DIMENSIONAL MICROPROCESSOR BASED PARABOLIC ANTENNA CONTROLLER
 DESIGN OF A TWO DIMENSIONAL MICROPROCESSOR BASED PARABOLIC ANTENNA CONTROLLER Veysel Silindir, Haluk Gözde, Gazi University, Electrical And Electronics Engineering Department, Ankara, Turkey 4 th Main
DESIGN OF A TWO DIMENSIONAL MICROPROCESSOR BASED PARABOLIC ANTENNA CONTROLLER Veysel Silindir, Haluk Gözde, Gazi University, Electrical And Electronics Engineering Department, Ankara, Turkey 4 th Main
Understanding Digital Signal Processing
 Understanding Digital Signal Processing Richard G. Lyons PRENTICE HALL PTR PRENTICE HALL Professional Technical Reference Upper Saddle River, New Jersey 07458 www.photr,com Contents Preface xi 1 DISCRETE
Understanding Digital Signal Processing Richard G. Lyons PRENTICE HALL PTR PRENTICE HALL Professional Technical Reference Upper Saddle River, New Jersey 07458 www.photr,com Contents Preface xi 1 DISCRETE
DIGITAL SIGNAL PROCESSING WITH VHDL
 DIGITAL SIGNAL PROCESSING WITH VHDL GET HANDS-ON FROM THEORY TO PRACTICE IN 6 DAYS MODEL WITH SCILAB, BUILD WITH VHDL NUMEROUS MODELLING & SIMULATIONS DIRECTLY DESIGN DSP HARDWARE Brought to you by: Copyright(c)
DIGITAL SIGNAL PROCESSING WITH VHDL GET HANDS-ON FROM THEORY TO PRACTICE IN 6 DAYS MODEL WITH SCILAB, BUILD WITH VHDL NUMEROUS MODELLING & SIMULATIONS DIRECTLY DESIGN DSP HARDWARE Brought to you by: Copyright(c)
MICROCONTROLLERS Stepper motor control with Sequential Logic Circuits
 PH-315 MICROCONTROLLERS Stepper motor control with Sequential Logic Circuits Portland State University Summary Four sequential digital waveforms are used to control a stepper motor. The main objective
PH-315 MICROCONTROLLERS Stepper motor control with Sequential Logic Circuits Portland State University Summary Four sequential digital waveforms are used to control a stepper motor. The main objective
A PID Controller for Real-Time DC Motor Speed Control using the C505C Microcontroller
 A PID Controller for Real-Time DC Motor Speed Control using the C505C Microcontroller Sukumar Kamalasadan Division of Engineering and Computer Technology University of West Florida, Pensacola, FL, 32513
A PID Controller for Real-Time DC Motor Speed Control using the C505C Microcontroller Sukumar Kamalasadan Division of Engineering and Computer Technology University of West Florida, Pensacola, FL, 32513
Application Note, V1.0, March 2008 AP XC2000 Family. DSP Examples for C166S V2 Lib. Microcontrollers
 Application Note, V1.0, March 2008 AP16124 XC2000 Family Microcontrollers Edition 2008-03 Published by Infineon Technologies AG 81726 Munich, Germany 2008 Infineon Technologies AG All Rights Reserved.
Application Note, V1.0, March 2008 AP16124 XC2000 Family Microcontrollers Edition 2008-03 Published by Infineon Technologies AG 81726 Munich, Germany 2008 Infineon Technologies AG All Rights Reserved.
DSP Filter Design for Flexible Alternating Current Transmission Systems
 DSP Filter Design for Flexible Alternating Current Transmission Systems O. Abarrategui Ranero 1, M.Gómez Perez 1, D.M. Larruskain Eskobal 1 1 Department of Electrical Engineering E.U.I.T.I.M.O.P., University
DSP Filter Design for Flexible Alternating Current Transmission Systems O. Abarrategui Ranero 1, M.Gómez Perez 1, D.M. Larruskain Eskobal 1 1 Department of Electrical Engineering E.U.I.T.I.M.O.P., University
DFT: Discrete Fourier Transform & Linear Signal Processing
 DFT: Discrete Fourier Transform & Linear Signal Processing 2 nd Year Electronics Lab IMPERIAL COLLEGE LONDON Table of Contents Equipment... 2 Aims... 2 Objectives... 2 Recommended Textbooks... 3 Recommended
DFT: Discrete Fourier Transform & Linear Signal Processing 2 nd Year Electronics Lab IMPERIAL COLLEGE LONDON Table of Contents Equipment... 2 Aims... 2 Objectives... 2 Recommended Textbooks... 3 Recommended
Digital Filters Using the TMS320C6000
 HUNT ENGINEERING Chestnut Court, Burton Row, Brent Knoll, Somerset, TA9 4BP, UK Tel: (+44) (0)278 76088, Fax: (+44) (0)278 76099, Email: sales@hunteng.demon.co.uk URL: http://www.hunteng.co.uk Digital
HUNT ENGINEERING Chestnut Court, Burton Row, Brent Knoll, Somerset, TA9 4BP, UK Tel: (+44) (0)278 76088, Fax: (+44) (0)278 76099, Email: sales@hunteng.demon.co.uk URL: http://www.hunteng.co.uk Digital
You CAN Do Digital Filtering with an MCU!
 You CAN Do Digital Filtering with an MCU! Kevin P King - Senior Staff Application Engineer Class ID: CC13B Renesas Electronics America Inc. Kevin P King Senior Staff Application Engineer RX DSP Library
You CAN Do Digital Filtering with an MCU! Kevin P King - Senior Staff Application Engineer Class ID: CC13B Renesas Electronics America Inc. Kevin P King Senior Staff Application Engineer RX DSP Library
EE 470 Signals and Systems
 EE 470 Signals and Systems 9. Introduction to the Design of Discrete Filters Prof. Yasser Mostafa Kadah Textbook Luis Chapparo, Signals and Systems Using Matlab, 2 nd ed., Academic Press, 2015. Filters
EE 470 Signals and Systems 9. Introduction to the Design of Discrete Filters Prof. Yasser Mostafa Kadah Textbook Luis Chapparo, Signals and Systems Using Matlab, 2 nd ed., Academic Press, 2015. Filters
The University of Texas at Austin Dept. of Electrical and Computer Engineering Midterm #1
 The University of Texas at Austin Dept. of Electrical and Computer Engineering Midterm #1 Date: October 18, 2013 Course: EE 445S Evans Name: Last, First The exam is scheduled to last 50 minutes. Open books
The University of Texas at Austin Dept. of Electrical and Computer Engineering Midterm #1 Date: October 18, 2013 Course: EE 445S Evans Name: Last, First The exam is scheduled to last 50 minutes. Open books
B.Tech III Year II Semester (R13) Regular & Supplementary Examinations May/June 2017 DIGITAL SIGNAL PROCESSING (Common to ECE and EIE)
 Regular & Supplementary Examinations May/June 2017 DIGITAL SIGNAL PROCESSING (Common to ECE and EIE)") Code: 13A04602 R13 B.Tech III Year II Semester (R13) Regular & Supplementary Examinations May/June 2017 (Common to ECE and EIE) PART A (Compulsory Question) 1 Answer the following: (10 X 02 = 20 Marks)
Code: 13A04602 R13 B.Tech III Year II Semester (R13) Regular & Supplementary Examinations May/June 2017 (Common to ECE and EIE) PART A (Compulsory Question) 1 Answer the following: (10 X 02 = 20 Marks)
2) How fast can we implement these in a system
 How fast can we implement these in a system") Filtration Now that we have looked at the concept of interpolation we have seen practically that a "digital filter" (hold, or interpolate) can affect the frequency response of the overall system. We need
Filtration Now that we have looked at the concept of interpolation we have seen practically that a "digital filter" (hold, or interpolate) can affect the frequency response of the overall system. We need
EECS 452 Midterm Exam (solns) Fall 2012
 Fall 2012") EECS 452 Midterm Exam (solns) Fall 2012 Name: unique name: Sign the honor code: I have neither given nor received aid on this exam nor observed anyone else doing so. Scores: # Points Section I /40 Section
EECS 452 Midterm Exam (solns) Fall 2012 Name: unique name: Sign the honor code: I have neither given nor received aid on this exam nor observed anyone else doing so. Scores: # Points Section I /40 Section
EECS 452 Midterm Closed book part Winter 2013
 EECS 452 Midterm Closed book part Winter 2013 Name: unique name: Sign the honor code: I have neither given nor received aid on this exam nor observed anyone else doing so. Scores: # Points Closed book
EECS 452 Midterm Closed book part Winter 2013 Name: unique name: Sign the honor code: I have neither given nor received aid on this exam nor observed anyone else doing so. Scores: # Points Closed book
Chapter 6: Microcontrollers
 Chapter 6: Microcontrollers 1. Introduction to Microcontrollers It s in the name. Microcontrollers: are tiny; control other electronic and mechanical systems. They are found in a huge range of products:
Chapter 6: Microcontrollers 1. Introduction to Microcontrollers It s in the name. Microcontrollers: are tiny; control other electronic and mechanical systems. They are found in a huge range of products:
AN1567 APPLICATION NOTE
 AN1567 APPLICATION NOTE Engine Knock Detection With ST10-DSP Microcontrollers This application note describes knock detection methods implemented in automotive engine control units. DSP algorithms along
AN1567 APPLICATION NOTE Engine Knock Detection With ST10-DSP Microcontrollers This application note describes knock detection methods implemented in automotive engine control units. DSP algorithms along
Appendix B. Design Implementation Description For The Digital Frequency Demodulator
 Appendix B Design Implementation Description For The Digital Frequency Demodulator The DFD design implementation is divided into four sections: 1. Analog front end to signal condition and digitize the
Appendix B Design Implementation Description For The Digital Frequency Demodulator The DFD design implementation is divided into four sections: 1. Analog front end to signal condition and digitize the
ASN Filter Designer Professional/Lite Getting Started Guide
 ASN Filter Designer Professional/Lite Getting Started Guide December, 2011 ASN11-DOC007, Rev. 2 For public release Legal notices All material presented in this document is protected by copyright under
ASN Filter Designer Professional/Lite Getting Started Guide December, 2011 ASN11-DOC007, Rev. 2 For public release Legal notices All material presented in this document is protected by copyright under
Ch 5 Hardware Components for Automation
 Ch 5 Hardware Components for Automation Sections: 1. Sensors 2. Actuators 3. Analog-to-Digital Conversion 4. Digital-to-Analog Conversion 5. Input/Output Devices for Discrete Data Computer-Process Interface
Ch 5 Hardware Components for Automation Sections: 1. Sensors 2. Actuators 3. Analog-to-Digital Conversion 4. Digital-to-Analog Conversion 5. Input/Output Devices for Discrete Data Computer-Process Interface
Lecture 3 Review of Signals and Systems: Part 2. EE4900/EE6720 Digital Communications
 EE4900/EE6720: Digital Communications 1 Lecture 3 Review of Signals and Systems: Part 2 Block Diagrams of Communication System Digital Communication System 2 Informatio n (sound, video, text, data, ) Transducer
EE4900/EE6720: Digital Communications 1 Lecture 3 Review of Signals and Systems: Part 2 Block Diagrams of Communication System Digital Communication System 2 Informatio n (sound, video, text, data, ) Transducer
Motor control using FPGA
 Motor control using FPGA MOTIVATION In the previous chapter you learnt ways to interface external world signals with an FPGA. The next chapter discusses digital design and control implementation of different
Motor control using FPGA MOTIVATION In the previous chapter you learnt ways to interface external world signals with an FPGA. The next chapter discusses digital design and control implementation of different
Basic NC and CNC. Dr. J. Ramkumar Professor, Department of Mechanical Engineering Micro machining Lab, I.I.T. Kanpur
 Basic NC and CNC Dr. J. Ramkumar Professor, Department of Mechanical Engineering Micro machining Lab, I.I.T. Kanpur Micro machining Lab, I.I.T. Kanpur Outline 1. Introduction to CNC machine 2. Component
Basic NC and CNC Dr. J. Ramkumar Professor, Department of Mechanical Engineering Micro machining Lab, I.I.T. Kanpur Micro machining Lab, I.I.T. Kanpur Outline 1. Introduction to CNC machine 2. Component
INTRODUCTION DIGITAL SIGNAL PROCESSING
 INTRODUCTION TO DIGITAL SIGNAL PROCESSING by Dr. James Hahn Adjunct Professor Washington University St. Louis 1/22/11 11:28 AM INTRODUCTION Purpose/objective of the course: To provide sufficient background
INTRODUCTION TO DIGITAL SIGNAL PROCESSING by Dr. James Hahn Adjunct Professor Washington University St. Louis 1/22/11 11:28 AM INTRODUCTION Purpose/objective of the course: To provide sufficient background
Implementing Logic with the Embedded Array
 Implementing Logic with the Embedded Array in FLEX 10K Devices May 2001, ver. 2.1 Product Information Bulletin 21 Introduction Altera s FLEX 10K devices are the first programmable logic devices (PLDs)
Implementing Logic with the Embedded Array in FLEX 10K Devices May 2001, ver. 2.1 Product Information Bulletin 21 Introduction Altera s FLEX 10K devices are the first programmable logic devices (PLDs)
NH 67, Karur Trichy Highways, Puliyur C.F, Karur District DEPARTMENT OF INFORMATION TECHNOLOGY DIGITAL SIGNAL PROCESSING UNIT 3
 NH 67, Karur Trichy Highways, Puliyur C.F, 639 114 Karur District DEPARTMENT OF INFORMATION TECHNOLOGY DIGITAL SIGNAL PROCESSING UNIT 3 IIR FILTER DESIGN Structure of IIR System design of Discrete time
NH 67, Karur Trichy Highways, Puliyur C.F, 639 114 Karur District DEPARTMENT OF INFORMATION TECHNOLOGY DIGITAL SIGNAL PROCESSING UNIT 3 IIR FILTER DESIGN Structure of IIR System design of Discrete time
DISCRETE FOURIER TRANSFORM AND FILTER DESIGN
 DISCRETE FOURIER TRANSFORM AND FILTER DESIGN N. C. State University CSC557 Multimedia Computing and Networking Fall 2001 Lecture # 03 Spectrum of a Square Wave 2 Results of Some Filters 3 Notation 4 x[n]
DISCRETE FOURIER TRANSFORM AND FILTER DESIGN N. C. State University CSC557 Multimedia Computing and Networking Fall 2001 Lecture # 03 Spectrum of a Square Wave 2 Results of Some Filters 3 Notation 4 x[n]
GUJARAT TECHNOLOGICAL UNIVERSITY
 Type of course: Compulsory GUJARAT TECHNOLOGICAL UNIVERSITY SUBJECT NAME: Digital Signal Processing SUBJECT CODE: 2171003 B.E. 7 th SEMESTER Prerequisite: Higher Engineering Mathematics, Different Transforms
Type of course: Compulsory GUJARAT TECHNOLOGICAL UNIVERSITY SUBJECT NAME: Digital Signal Processing SUBJECT CODE: 2171003 B.E. 7 th SEMESTER Prerequisite: Higher Engineering Mathematics, Different Transforms
POWER- SWITCHING CONVERTERS Medium and High Power
 POWER- SWITCHING CONVERTERS Medium and High Power By Dorin O. Neacsu Taylor &. Francis Taylor & Francis Group Boca Raton London New York CRC is an imprint of the Taylor & Francis Group, an informa business
POWER- SWITCHING CONVERTERS Medium and High Power By Dorin O. Neacsu Taylor &. Francis Taylor & Francis Group Boca Raton London New York CRC is an imprint of the Taylor & Francis Group, an informa business
PLEASE READ FIRST (NEW 2011 VERSION) Main features:
 Main features:") PLEASE READ FIRST (NEW 2011 VERSION) Main features: engine control system, the user can set different types of crankshaft independent Signal output (for all models of the computer-driven) automatic transmission
PLEASE READ FIRST (NEW 2011 VERSION) Main features: engine control system, the user can set different types of crankshaft independent Signal output (for all models of the computer-driven) automatic transmission
Lock Cracker S. Lust, E. Skjel, R. LeBlanc, C. Kim
 Lock Cracker S. Lust, E. Skjel, R. LeBlanc, C. Kim Abstract - This project utilized Eleven Engineering s XInC2 development board to control several peripheral devices to open a standard 40 digit combination
Lock Cracker S. Lust, E. Skjel, R. LeBlanc, C. Kim Abstract - This project utilized Eleven Engineering s XInC2 development board to control several peripheral devices to open a standard 40 digit combination
L T P CLASS WORK : EXAM : 100 TOTAL : 150 DURATION OF EXAM : 3 HRS
 EE-401-E DATA COMMUNICATION L T P CLASS WORK : 50 3 1 0 EXAM : 100 TOTAL : 150 UNIT 1 DIGITAL COMMUNICATION : Introduction, digital communication, Shannon limit for information capacity, digital radio,
EE-401-E DATA COMMUNICATION L T P CLASS WORK : 50 3 1 0 EXAM : 100 TOTAL : 150 UNIT 1 DIGITAL COMMUNICATION : Introduction, digital communication, Shannon limit for information capacity, digital radio,
combine regular DC-motors with a gear-box and an encoder/potentiometer to form a position control loop can only assume a limited range of angular
 Embedded Control Applications II MP10-1 Embedded Control Applications II MP10-2 week lecture topics 10 Embedded Control Applications II - Servo-motor control - Stepper motor control - The control of a
Embedded Control Applications II MP10-1 Embedded Control Applications II MP10-2 week lecture topics 10 Embedded Control Applications II - Servo-motor control - Stepper motor control - The control of a
Feedback Devices. By John Mazurkiewicz. Baldor Electric
 Feedback Devices By John Mazurkiewicz Baldor Electric Closed loop systems use feedback signals for stabilization, speed and position information. There are a variety of devices to provide this data, such
Feedback Devices By John Mazurkiewicz Baldor Electric Closed loop systems use feedback signals for stabilization, speed and position information. There are a variety of devices to provide this data, such
SYLLABUS. For B.TECH. PROGRAMME ELECTRONICS & COMMUNICATION ENGINEERING
 SYLLABUS For B.TECH. PROGRAMME In ELECTRONICS & COMMUNICATION ENGINEERING INSTITUTE OF TECHNOLOGY UNIVERSITY OF KASHMIR ZAKURA CAMPUS SRINAGAR, J&K, 190006 Course No. Lect Tut Prac ECE5117B Digital Signal
SYLLABUS For B.TECH. PROGRAMME In ELECTRONICS & COMMUNICATION ENGINEERING INSTITUTE OF TECHNOLOGY UNIVERSITY OF KASHMIR ZAKURA CAMPUS SRINAGAR, J&K, 190006 Course No. Lect Tut Prac ECE5117B Digital Signal
CHAPTER 2 FIR ARCHITECTURE FOR THE FILTER BANK OF SPEECH PROCESSOR
 22 CHAPTER 2 FIR ARCHITECTURE FOR THE FILTER BANK OF SPEECH PROCESSOR 2.1 INTRODUCTION A CI is a device that can provide a sense of sound to people who are deaf or profoundly hearing-impaired. Filters
22 CHAPTER 2 FIR ARCHITECTURE FOR THE FILTER BANK OF SPEECH PROCESSOR 2.1 INTRODUCTION A CI is a device that can provide a sense of sound to people who are deaf or profoundly hearing-impaired. Filters
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 05.11.2015
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 05.11.2015
Stepping motor controlling apparatus
 Stepping motor controlling apparatus Ngoc Quy, Le*, and Jae Wook, Jeon** School of Information and Computer Engineering, SungKyunKwan University, 300 Chunchundong, Jangangu, Suwon, Gyeonggi 440746, Korea
Stepping motor controlling apparatus Ngoc Quy, Le*, and Jae Wook, Jeon** School of Information and Computer Engineering, SungKyunKwan University, 300 Chunchundong, Jangangu, Suwon, Gyeonggi 440746, Korea
McGraw-Hill Irwin DIGITAL SIGNAL PROCESSING. A Computer-Based Approach. Second Edition. Sanjit K. Mitra
 DIGITAL SIGNAL PROCESSING A Computer-Based Approach Second Edition Sanjit K. Mitra Department of Electrical and Computer Engineering University of California, Santa Barbara Jurgen - Knorr- Kbliothek Spende
DIGITAL SIGNAL PROCESSING A Computer-Based Approach Second Edition Sanjit K. Mitra Department of Electrical and Computer Engineering University of California, Santa Barbara Jurgen - Knorr- Kbliothek Spende
The Development and Application of High Compression Ratio Methanol Engine ECU
 National Conference on Information Technology and Computer Science (CITCS 2012) The Development and Application of High Compression Ratio Methanol Engine ECU Hong Bin, 15922184696 hongbinlqyun@163.com
National Conference on Information Technology and Computer Science (CITCS 2012) The Development and Application of High Compression Ratio Methanol Engine ECU Hong Bin, 15922184696 hongbinlqyun@163.com
EC6502 PRINCIPLES OF DIGITAL SIGNAL PROCESSING
 1. State the properties of DFT? UNIT-I DISCRETE FOURIER TRANSFORM 1) Periodicity 2) Linearity and symmetry 3) Multiplication of two DFTs 4) Circular convolution 5) Time reversal 6) Circular time shift
1. State the properties of DFT? UNIT-I DISCRETE FOURIER TRANSFORM 1) Periodicity 2) Linearity and symmetry 3) Multiplication of two DFTs 4) Circular convolution 5) Time reversal 6) Circular time shift
Digital Signal Processing
 Digital Signal Processing Fourth Edition John G. Proakis Department of Electrical and Computer Engineering Northeastern University Boston, Massachusetts Dimitris G. Manolakis MIT Lincoln Laboratory Lexington,
Digital Signal Processing Fourth Edition John G. Proakis Department of Electrical and Computer Engineering Northeastern University Boston, Massachusetts Dimitris G. Manolakis MIT Lincoln Laboratory Lexington,
Section 1. Fundamentals of DDS Technology
 Section 1. Fundamentals of DDS Technology Overview Direct digital synthesis (DDS) is a technique for using digital data processing blocks as a means to generate a frequency- and phase-tunable output signal
Section 1. Fundamentals of DDS Technology Overview Direct digital synthesis (DDS) is a technique for using digital data processing blocks as a means to generate a frequency- and phase-tunable output signal
Advanced Digital Signal Processing Part 5: Digital Filters
 Advanced Digital Signal Processing Part 5: Digital Filters Gerhard Schmidt Christian-Albrechts-Universität zu Kiel Faculty of Engineering Institute of Electrical and Information Engineering Digital Signal
Advanced Digital Signal Processing Part 5: Digital Filters Gerhard Schmidt Christian-Albrechts-Universität zu Kiel Faculty of Engineering Institute of Electrical and Information Engineering Digital Signal
Standard single-purpose processors: Peripherals
 3-1 Chapter 3 Standard single-purpose processors: Peripherals 3.1 Introduction A single-purpose processor is a digital system intended to solve a specific computation task. The processor may be a standard
3-1 Chapter 3 Standard single-purpose processors: Peripherals 3.1 Introduction A single-purpose processor is a digital system intended to solve a specific computation task. The processor may be a standard
Lab 4 Digital Scope and Spectrum Analyzer
 Lab 4 Digital Scope and Spectrum Analyzer Page 4.1 Lab 4 Digital Scope and Spectrum Analyzer Goals Review Starter files Interface a microphone and record sounds, Design and implement an analog HPF, LPF
Lab 4 Digital Scope and Spectrum Analyzer Page 4.1 Lab 4 Digital Scope and Spectrum Analyzer Goals Review Starter files Interface a microphone and record sounds, Design and implement an analog HPF, LPF
CS3291: Digital Signal Processing
 CS39 Exam Jan 005 //08 /BMGC University of Manchester Department of Computer Science First Semester Year 3 Examination Paper CS39: Digital Signal Processing Date of Examination: January 005 Answer THREE
CS39 Exam Jan 005 //08 /BMGC University of Manchester Department of Computer Science First Semester Year 3 Examination Paper CS39: Digital Signal Processing Date of Examination: January 005 Answer THREE
Stratix II Filtering Lab
 October 2004, ver. 1.0 Application Note 362 Introduction The filtering reference design provided in the DSP Development Kit, Stratix II Edition, shows you how to use the Altera DSP Builder for system design,
October 2004, ver. 1.0 Application Note 362 Introduction The filtering reference design provided in the DSP Development Kit, Stratix II Edition, shows you how to use the Altera DSP Builder for system design,
Designing Filters Using the NI LabVIEW Digital Filter Design Toolkit
 Application Note 097 Designing Filters Using the NI LabVIEW Digital Filter Design Toolkit Introduction The importance of digital filters is well established. Digital filters, and more generally digital
Application Note 097 Designing Filters Using the NI LabVIEW Digital Filter Design Toolkit Introduction The importance of digital filters is well established. Digital filters, and more generally digital
REAL TIME DIGITAL SIGNAL PROCESSING. Introduction
 REAL TIME DIGITAL SIGNAL Introduction Why Digital? A brief comparison with analog. PROCESSING Seminario de Electrónica: Sistemas Embebidos Advantages The BIG picture Flexibility. Easily modifiable and
REAL TIME DIGITAL SIGNAL Introduction Why Digital? A brief comparison with analog. PROCESSING Seminario de Electrónica: Sistemas Embebidos Advantages The BIG picture Flexibility. Easily modifiable and
Lab 8. Signal Analysis Using Matlab Simulink
 E E 2 7 5 Lab June 30, 2006 Lab 8. Signal Analysis Using Matlab Simulink Introduction The Matlab Simulink software allows you to model digital signals, examine power spectra of digital signals, represent
E E 2 7 5 Lab June 30, 2006 Lab 8. Signal Analysis Using Matlab Simulink Introduction The Matlab Simulink software allows you to model digital signals, examine power spectra of digital signals, represent
Problem Point Value Your score Topic 1 28 Discrete-Time Filter Analysis 2 24 Improving Signal Quality 3 24 Filter Bank Design 4 24 Potpourri Total 100
 The University of Texas at Austin Dept. of Electrical and Computer Engineering Midterm #1 Date: March 7, 2014 Course: EE 445S Evans Name: Last, First The exam is scheduled to last 50 minutes. Open books
The University of Texas at Austin Dept. of Electrical and Computer Engineering Midterm #1 Date: March 7, 2014 Course: EE 445S Evans Name: Last, First The exam is scheduled to last 50 minutes. Open books
Implementation of FPGA based Design for Digital Signal Processing
 e-issn 2455 1392 Volume 2 Issue 8, August 2016 pp. 150 156 Scientific Journal Impact Factor : 3.468 http://www.ijcter.com Implementation of FPGA based Design for Digital Signal Processing Neeraj Soni 1,
e-issn 2455 1392 Volume 2 Issue 8, August 2016 pp. 150 156 Scientific Journal Impact Factor : 3.468 http://www.ijcter.com Implementation of FPGA based Design for Digital Signal Processing Neeraj Soni 1,
A Model-Based Development Environment and Its Application in Engine Control
 A Model-Based Development Environment and Its Application in Engine Control Shugang Jiang, Michael Smith, Charles Halasz A&D Technology Inc. ABSTRACT To meet the ever increasing requirements for engine
A Model-Based Development Environment and Its Application in Engine Control Shugang Jiang, Michael Smith, Charles Halasz A&D Technology Inc. ABSTRACT To meet the ever increasing requirements for engine
Design Implementation Description for the Digital Frequency Oscillator
 Appendix A Design Implementation Description for the Frequency Oscillator A.1 Input Front End The input data front end accepts either analog single ended or differential inputs (figure A-1). The input
Appendix A Design Implementation Description for the Frequency Oscillator A.1 Input Front End The input data front end accepts either analog single ended or differential inputs (figure A-1). The input
LLRF4 Evaluation Board
 LLRF4 Evaluation Board USPAS Lab Reference Author: Dmitry Teytelman Revision: 1.1 June 11, 2009 Copyright Dimtel, Inc., 2009. All rights reserved. Dimtel, Inc. 2059 Camden Avenue, Suite 136 San Jose, CA
LLRF4 Evaluation Board USPAS Lab Reference Author: Dmitry Teytelman Revision: 1.1 June 11, 2009 Copyright Dimtel, Inc., 2009. All rights reserved. Dimtel, Inc. 2059 Camden Avenue, Suite 136 San Jose, CA
COVENANT UNIVERSITY NIGERIA TUTORIAL KIT OMEGA SEMESTER PROGRAMME: MECHANICAL ENGINEERING
 COVENANT UNIVERSITY NIGERIA TUTORIAL KIT OMEGA SEMESTER PROGRAMME: MECHANICAL ENGINEERING COURSE: MCE 527 DISCLAIMER The contents of this document are intended for practice and leaning purposes at the
COVENANT UNIVERSITY NIGERIA TUTORIAL KIT OMEGA SEMESTER PROGRAMME: MECHANICAL ENGINEERING COURSE: MCE 527 DISCLAIMER The contents of this document are intended for practice and leaning purposes at the
Vector Arithmetic Logic Unit Amit Kumar Dutta JIS College of Engineering, Kalyani, WB, India
 Vol. 2 Issue 2, December -23, pp: (75-8), Available online at: www.erpublications.com Vector Arithmetic Logic Unit Amit Kumar Dutta JIS College of Engineering, Kalyani, WB, India Abstract: Real time operation
Vol. 2 Issue 2, December -23, pp: (75-8), Available online at: www.erpublications.com Vector Arithmetic Logic Unit Amit Kumar Dutta JIS College of Engineering, Kalyani, WB, India Abstract: Real time operation
EXPERIMENT 6: Advanced I/O Programming
 EXPERIMENT 6: Advanced I/O Programming Objectives: To familiarize students with DC Motor control and Stepper Motor Interfacing. To utilize MikroC and MPLAB for Input Output Interfacing and motor control.
EXPERIMENT 6: Advanced I/O Programming Objectives: To familiarize students with DC Motor control and Stepper Motor Interfacing. To utilize MikroC and MPLAB for Input Output Interfacing and motor control.
Validation & Analysis of Complex Serial Bus Link Models
 Validation & Analysis of Complex Serial Bus Link Models Version 1.0 John Pickerd, Tektronix, Inc John.J.Pickerd@Tek.com 503-627-5122 Kan Tan, Tektronix, Inc Kan.Tan@Tektronix.com 503-627-2049 Abstract
Validation & Analysis of Complex Serial Bus Link Models Version 1.0 John Pickerd, Tektronix, Inc John.J.Pickerd@Tek.com 503-627-5122 Kan Tan, Tektronix, Inc Kan.Tan@Tektronix.com 503-627-2049 Abstract
SMS045 - DSP Systems in Practice. Lab 1 - Filter Design and Evaluation in MATLAB Due date: Thursday Nov 13, 2003
 SMS045 - DSP Systems in Practice Lab 1 - Filter Design and Evaluation in MATLAB Due date: Thursday Nov 13, 2003 Lab Purpose This lab will introduce MATLAB as a tool for designing and evaluating digital
SMS045 - DSP Systems in Practice Lab 1 - Filter Design and Evaluation in MATLAB Due date: Thursday Nov 13, 2003 Lab Purpose This lab will introduce MATLAB as a tool for designing and evaluating digital
Step vs. Servo Selecting the Best
 Step vs. Servo Selecting the Best Dan Jones Over the many years, there have been many technical papers and articles about which motor is the best. The short and sweet answer is let s talk about the application.
Step vs. Servo Selecting the Best Dan Jones Over the many years, there have been many technical papers and articles about which motor is the best. The short and sweet answer is let s talk about the application.
EE 314 Spring 2003 Microprocessor Systems
 EE 314 Spring 2003 Microprocessor Systems Laboratory Project #9 Closed Loop Control Overview and Introduction This project will bring together several pieces of software and draw on knowledge gained in
EE 314 Spring 2003 Microprocessor Systems Laboratory Project #9 Closed Loop Control Overview and Introduction This project will bring together several pieces of software and draw on knowledge gained in
Analog I/O. ECE 153B Sensor & Peripheral Interface Design Winter 2016
 Analog I/O ECE 153B Sensor & Peripheral Interface Design Introduction Anytime we need to monitor or control analog signals with a digital system, we require analogto-digital (ADC) and digital-to-analog
Analog I/O ECE 153B Sensor & Peripheral Interface Design Introduction Anytime we need to monitor or control analog signals with a digital system, we require analogto-digital (ADC) and digital-to-analog
(i) Understanding of the characteristics of linear-phase finite impulse response (FIR) filters
 Understanding of the characteristics of linear-phase finite impulse response (FIR) filters") FIR Filter Design Chapter Intended Learning Outcomes: (i) Understanding of the characteristics of linear-phase finite impulse response (FIR) filters (ii) Ability to design linear-phase FIR filters according
FIR Filter Design Chapter Intended Learning Outcomes: (i) Understanding of the characteristics of linear-phase finite impulse response (FIR) filters (ii) Ability to design linear-phase FIR filters according
A New High Speed Low Power Performance of 8- Bit Parallel Multiplier-Accumulator Using Modified Radix-2 Booth Encoded Algorithm
 A New High Speed Low Power Performance of 8- Bit Parallel Multiplier-Accumulator Using Modified Radix-2 Booth Encoded Algorithm V.Sandeep Kumar Assistant Professor, Indur Institute Of Engineering & Technology,Siddipet
A New High Speed Low Power Performance of 8- Bit Parallel Multiplier-Accumulator Using Modified Radix-2 Booth Encoded Algorithm V.Sandeep Kumar Assistant Professor, Indur Institute Of Engineering & Technology,Siddipet
Experiment 2 Effects of Filtering
 Experiment 2 Effects of Filtering INTRODUCTION This experiment demonstrates the relationship between the time and frequency domains. A basic rule of thumb is that the wider the bandwidth allowed for the
Experiment 2 Effects of Filtering INTRODUCTION This experiment demonstrates the relationship between the time and frequency domains. A basic rule of thumb is that the wider the bandwidth allowed for the
System analysis and signal processing
 System analysis and signal processing with emphasis on the use of MATLAB PHILIP DENBIGH University of Sussex ADDISON-WESLEY Harlow, England Reading, Massachusetts Menlow Park, California New York Don Mills,
System analysis and signal processing with emphasis on the use of MATLAB PHILIP DENBIGH University of Sussex ADDISON-WESLEY Harlow, England Reading, Massachusetts Menlow Park, California New York Don Mills,
EECS 452 Midterm Exam Winter 2012
 EECS 452 Midterm Exam Winter 2012 Name: unique name: Sign the honor code: I have neither given nor received aid on this exam nor observed anyone else doing so. Scores: # Points Section I /40 Section II
EECS 452 Midterm Exam Winter 2012 Name: unique name: Sign the honor code: I have neither given nor received aid on this exam nor observed anyone else doing so. Scores: # Points Section I /40 Section II
Stratix Filtering Reference Design
 Stratix Filtering Reference Design December 2004, ver. 3.0 Application Note 245 Introduction The filtering reference designs provided in the DSP Development Kit, Stratix Edition, and in the DSP Development
Stratix Filtering Reference Design December 2004, ver. 3.0 Application Note 245 Introduction The filtering reference designs provided in the DSP Development Kit, Stratix Edition, and in the DSP Development
A13C: Performing Digital Filtering on an MCU
 A13C: Performing Digital Filtering on an MCU Renesas Electronics America Inc. Kevin P King Senior Staff Applications Engineer 13 October 2010 Version 1.2 1 Kevin P King Senior Staff Application Engineer
A13C: Performing Digital Filtering on an MCU Renesas Electronics America Inc. Kevin P King Senior Staff Applications Engineer 13 October 2010 Version 1.2 1 Kevin P King Senior Staff Application Engineer
The University of Texas at Austin Dept. of Electrical and Computer Engineering Final Exam
 The University of Texas at Austin Dept. of Electrical and Computer Engineering Final Exam Date: December 18, 2017 Course: EE 313 Evans Name: Last, First The exam is scheduled to last three hours. Open
The University of Texas at Austin Dept. of Electrical and Computer Engineering Final Exam Date: December 18, 2017 Course: EE 313 Evans Name: Last, First The exam is scheduled to last three hours. Open
A Survey on Power Reduction Techniques in FIR Filter
 A Survey on Power Reduction Techniques in FIR Filter 1 Pooja Madhumatke, 2 Shubhangi Borkar, 3 Dinesh Katole 1, 2 Department of Computer Science & Engineering, RTMNU, Nagpur Institute of Technology Nagpur,
A Survey on Power Reduction Techniques in FIR Filter 1 Pooja Madhumatke, 2 Shubhangi Borkar, 3 Dinesh Katole 1, 2 Department of Computer Science & Engineering, RTMNU, Nagpur Institute of Technology Nagpur,
Analogue Interfacing. What is a signal? Continuous vs. Discrete Time. Continuous time signals
 Analogue Interfacing What is a signal? Signal: Function of one or more independent variable(s) such as space or time Examples include images and speech Continuous vs. Discrete Time Continuous time signals
Analogue Interfacing What is a signal? Signal: Function of one or more independent variable(s) such as space or time Examples include images and speech Continuous vs. Discrete Time Continuous time signals
Lesson 7. Digital Signal Processors
 Lesson 7 Digital Signal Processors Instructional Objectives After going through this lesson the student would learn o Architecture of a Real time Signal Processing Platform o Different Errors introduced
Lesson 7 Digital Signal Processors Instructional Objectives After going through this lesson the student would learn o Architecture of a Real time Signal Processing Platform o Different Errors introduced
Design of Joint Controller Circuit for PA10 Robot Arm
 Design of Joint Controller Circuit for PA10 Robot Arm Sereiratha Phal and Manop Wongsaisuwan Department of Electrical Engineering, Faculty of Engineering, Chulalongkorn University, Bangkok, 10330, Thailand.
Design of Joint Controller Circuit for PA10 Robot Arm Sereiratha Phal and Manop Wongsaisuwan Department of Electrical Engineering, Faculty of Engineering, Chulalongkorn University, Bangkok, 10330, Thailand.
CS545 Contents XIV. Components of a Robotic System. Signal Processing. Reading Assignment for Next Class
 CS545 Contents XIV Components of a Robotic System Power Supplies and Power Amplifiers Actuators Transmission Sensors Signal Processing Linear filtering Simple filtering Optimal filtering Reading Assignment
CS545 Contents XIV Components of a Robotic System Power Supplies and Power Amplifiers Actuators Transmission Sensors Signal Processing Linear filtering Simple filtering Optimal filtering Reading Assignment
1. In the command window, type "help conv" and press [enter]. Read the information displayed.
![1. In the command window, type help conv and press [enter]. Read the information displayed.](/thumbs/82/86785923.jpg "1. In the command window, type help conv and press [enter]. Read the information displayed.") ECE 317 Experiment 0 The purpose of this experiment is to understand how to represent signals in MATLAB, perform the convolution of signals, and study some simple LTI systems. Please answer all questions
ECE 317 Experiment 0 The purpose of this experiment is to understand how to represent signals in MATLAB, perform the convolution of signals, and study some simple LTI systems. Please answer all questions
Experiment 6: Multirate Signal Processing
 ECE431, Experiment 6, 2018 Communications Lab, University of Toronto Experiment 6: Multirate Signal Processing Bruno Korst - bkf@comm.utoronto.ca Abstract In this experiment, you will use decimation and
ECE431, Experiment 6, 2018 Communications Lab, University of Toronto Experiment 6: Multirate Signal Processing Bruno Korst - bkf@comm.utoronto.ca Abstract In this experiment, you will use decimation and
DC motor control using arduino
 DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
Design of Adjustable Reconfigurable Wireless Single Core
 IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p- ISSN: 2278-8735. Volume 6, Issue 2 (May. - Jun. 2013), PP 51-55 Design of Adjustable Reconfigurable Wireless Single
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p- ISSN: 2278-8735. Volume 6, Issue 2 (May. - Jun. 2013), PP 51-55 Design of Adjustable Reconfigurable Wireless Single
Job Sheet 2 Servo Control
 Job Sheet 2 Servo Control Electrical actuators are replacing hydraulic actuators in many industrial applications. Electric servomotors and linear actuators can perform many of the same physical displacement
Job Sheet 2 Servo Control Electrical actuators are replacing hydraulic actuators in many industrial applications. Electric servomotors and linear actuators can perform many of the same physical displacement
(i) Understanding of the characteristics of linear-phase finite impulse response (FIR) filters
 Understanding of the characteristics of linear-phase finite impulse response (FIR) filters") FIR Filter Design Chapter Intended Learning Outcomes: (i) Understanding of the characteristics of linear-phase finite impulse response (FIR) filters (ii) Ability to design linear-phase FIR filters according
FIR Filter Design Chapter Intended Learning Outcomes: (i) Understanding of the characteristics of linear-phase finite impulse response (FIR) filters (ii) Ability to design linear-phase FIR filters according
Digital Integrated CircuitDesign
 Digital Integrated CircuitDesign Lecture 13 Building Blocks (Multipliers) Register Adder Shift Register Adib Abrishamifar EE Department IUST Acknowledgement This lecture note has been summarized and categorized
Digital Integrated CircuitDesign Lecture 13 Building Blocks (Multipliers) Register Adder Shift Register Adib Abrishamifar EE Department IUST Acknowledgement This lecture note has been summarized and categorized
Lab Exercise 9: Stepper and Servo Motors
 ME 3200 Mechatronics Laboratory Lab Exercise 9: Stepper and Servo Motors Introduction In this laboratory exercise, you will explore some of the properties of stepper and servomotors. These actuators are
ME 3200 Mechatronics Laboratory Lab Exercise 9: Stepper and Servo Motors Introduction In this laboratory exercise, you will explore some of the properties of stepper and servomotors. These actuators are
Concordia University. Discrete-Time Signal Processing. Lab Manual (ELEC442) Dr. Wei-Ping Zhu
 Dr. Wei-Ping Zhu") Concordia University Discrete-Time Signal Processing Lab Manual (ELEC442) Course Instructor: Dr. Wei-Ping Zhu Fall 2012 Lab 1: Linear Constant Coefficient Difference Equations (LCCDE) Objective In this
Concordia University Discrete-Time Signal Processing Lab Manual (ELEC442) Course Instructor: Dr. Wei-Ping Zhu Fall 2012 Lab 1: Linear Constant Coefficient Difference Equations (LCCDE) Objective In this
Discrete Fourier Transform (DFT)
") Amplitude Amplitude Discrete Fourier Transform (DFT) DFT transforms the time domain signal samples to the frequency domain components. DFT Signal Spectrum Time Frequency DFT is often used to do frequency
Amplitude Amplitude Discrete Fourier Transform (DFT) DFT transforms the time domain signal samples to the frequency domain components. DFT Signal Spectrum Time Frequency DFT is often used to do frequency
Microcomputer Systems 1. Introduction to DSP S
 Microcomputer Systems 1 Introduction to DSP S Introduction to DSP s Definition: DSP Digital Signal Processing/Processor It refers to: Theoretical signal processing by digital means (subject of ECE3222,
Microcomputer Systems 1 Introduction to DSP S Introduction to DSP s Definition: DSP Digital Signal Processing/Processor It refers to: Theoretical signal processing by digital means (subject of ECE3222,
Cyclone II Filtering Lab
 May 2005, ver. 1.0 Application Note 376 Introduction The Cyclone II filtering lab design provided in the DSP Development Kit, Cyclone II Edition, shows you how to use the Altera DSP Builder for system
May 2005, ver. 1.0 Application Note 376 Introduction The Cyclone II filtering lab design provided in the DSP Development Kit, Cyclone II Edition, shows you how to use the Altera DSP Builder for system
4.5 Fractional Delay Operations with Allpass Filters
 158 Discrete-Time Modeling of Acoustic Tubes Using Fractional Delay Filters 4.5 Fractional Delay Operations with Allpass Filters The previous sections of this chapter have concentrated on the FIR implementation
158 Discrete-Time Modeling of Acoustic Tubes Using Fractional Delay Filters 4.5 Fractional Delay Operations with Allpass Filters The previous sections of this chapter have concentrated on the FIR implementation
Knock Signal Conditioning Using the Discrete Fourier Transform and Variable Detection Window Length
 SAE TECHICAL PAPER SERIES 27-1-159 Knock Signal Conditioning Using the Discrete Fourier Transform and Variable Detection Window Length Matthew J. Kearney Delphi Electronics & Safety Reprinted From: Electronic
SAE TECHICAL PAPER SERIES 27-1-159 Knock Signal Conditioning Using the Discrete Fourier Transform and Variable Detection Window Length Matthew J. Kearney Delphi Electronics & Safety Reprinted From: Electronic
On the Most Efficient M-Path Recursive Filter Structures and User Friendly Algorithms To Compute Their Coefficients
 On the ost Efficient -Path Recursive Filter Structures and User Friendly Algorithms To Compute Their Coefficients Kartik Nagappa Qualcomm kartikn@qualcomm.com ABSTRACT The standard design procedure for
On the ost Efficient -Path Recursive Filter Structures and User Friendly Algorithms To Compute Their Coefficients Kartik Nagappa Qualcomm kartikn@qualcomm.com ABSTRACT The standard design procedure for