Continuous-Time Analog Filters
|
|
|
- Ruth Kelley
- 5 years ago
- Views:
Transcription
1 ENGR 4333/5333: Digital Signal Processing Continuous-Time Analog Filters Chapter 2 Dr. Mohamed Bingabr University of Central Oklahoma
2 Outline Frequency Response of an LTIC System Signal Transmission through LTIC Systems Ideal and Realizable Filters Data Truncation by Windows Specification of Practical Filters Analog Filter Transmissions Practical Filter Families
3 2.1 Frequency Response of an LTIC System
4 Frequency Response of an LTIC System Time Domain x(t) δ (t) h(t) y(t) = x(t) h(t) h(t) X(s) Laplace Domain H(s) Y(s) = X(s) H(s) X(ω) Frequency Domain H(ω) Y(ω) = X(ω) H(ω)
5 Time Domain Verses Frequency Domain
6 Frequency Response of Common Systems An Ideal Time Delay of T seconds yy tt = xx(tt TT) An Ideal Differentiator yy tt = dddd dddd An Ideal Integrator yy tt = xx ττ ddττ
7 Pole-Zero Plots LTIC system is described by the constant-coefficient linear differential Equation.
.")
8 Example 2ss Consider a system whose transfer function is HH ss = ss 2 + 2ss + 5 Determine and plot the poles and zeros of H(s), and use the pole-zero information to predict overall system behavior. Confirm this predicted behavior by computing and graphing the system s frequency response (magnitude and phase). Lastly, find and plot the system response y(t) for the inputs (a) x a (t) = cos(2t) (b) x b (t) = 2sin(4t π/3)
9 Continue Example
10 2.2 Signal Transmission through LTIC Systems
11 Distortionless Transmission For distortionless transmission, we require that the system possess linear phase characteristics. For real systems, the phase is not only a linear function of ω but also passes through the origin (or ± π if a is negative) at ω = 0. Group Delay t g If group delay is constant then all frequency components are delayed by the same time interval.
12 Example Hilbert transformers are LTIC systems that, among other things, are useful in the study of communication systems. Ideally, a Hilbert transformer is described by h(t) =1/πt H(ω) = jsgn(ω). Compute and plot the magnitude response H(ω), the phase response H(ω), and the group delay t g (ω) of a Hilbert transformer. Compute and plot the output y(t) of this system in response to the pulse input x(t) = Π(t), and comment on the results. Solution
13
14 Nature of Distortion in Audio and Video Signals Human ear readily perceives amplitude distortion but is relatively insensitive to phase distortion. For phase distortion to become noticeable delay should be comparable to signal length. In audio signals, the average duration of a spoken syllable is on the order of 0.01 to 0.1 seconds the maximum variation in H(ω) is only a small fraction of a millisecond. A human eye is sensitive to phase distortion but is relatively insensitive to amplitude distortion.
15 Real Bandpass Systems and Group Delay For distortionless transmission of bandpass signals, the system need satisfy Generalized Linear Phase (GLP) Example: What is the output of an input x bp (t) = x(t) cos(ω c t) to the above bandpass filter. The envelope and carrier are both delayed by t g, although the carrier acquires an additional phase shift of φ 0. The delay t g is termed the group (or envelope) delay.
16 2.3 Ideal and Realizable Filters

17 Ideal and Realizable Filters
18 Ideal and Realizable Filters Example: Determine a suitable output delay t d for a practical audio filter designed to pass frequencies audible to humans. This delay is quite small compared with phoneme lengths, which are typically in the tens to hundreds of milliseconds.
19 2.4 Data Truncation by Windows
20 Data Truncation by Windows x(t): is the signal w(t): is the window x w (t): is the truncated x(t). The two side effects of truncation is spectral spreading and spectral leakage. Example: What is the effect of truncating a dc signal?
21 Lowpass Filter Design Using Windows Remedies for Truncation Impairments 1. The spectral spread (main lobe width) of a truncated signal is equal to the bandwidth of the window function w(t). 2. The smoother the signal, the faster is the decay of its spectrum (smaller leakage).
22 Common Window Functions
23 2.5 Specification of Practical Filters
, A passband is a frequency band over which the gain is between 1 δ p and 1.")
24 Specification of Practical Filters (Gain) A stopband is a frequency band over which the gain is below some small number δ s (the stopband ripple parameter), A passband is a frequency band over which the gain is between 1 δ p and 1. ω P = Passband edge ω S = Stopband edge

25 Specification of Practical Filters (Attenuation) Frequently, it is more convenient to work with filter attenuation rather than filter gain. Filter attenuation, expressed in db, is the negative of filter gain, also expressed in db. The half-power gain of 1/ 2, for example, is 20log 10 1/ db, which corresponds to 3.01 db of attenuation. α p : The maximum passband attenuation α s : The minimum stopband attenuation
26 2.6 Analog Filter Transformations
27 Analog Filter Transformation Filter design start with a prototype filter (usually normalized lowpass) and then transform it to the final desired filter type. A normalized lowpass filter has unity critical frequencies such as ω p and ω s. Frequency Transformation starts with a normalized lowpass response to produce, respectively, a lowpass, highpass, bandpass, or bandstop response.
28 Lowpass-to-Lowpass Transformation ω o is the half-power prototype frequency ω 1 is the half-power frequency of the desired filter H(ω) ω o ω ω 1 Example: A lowpass prototype filter is given as H p (s)= 2/s+2. Determine the lowpass-to-lowpass transformation rule to produce a lowpass filter H lp (s) with a half-power (3 db) frequency of ω 1 = 3 rad/s. Plot the magnitude response of the resulting lowpass filter.
 = 1/ jω+1.")
29 Lowpass-to-Highpass Transformation In the lowpass-to-highpass transformation the frequencies undergo reciprocal transformation. Example: Apply the lowpass-to-highpass transformation ω 2/ ω to the lowpass prototype H p (ω) = 1/ jω+1. Plot the magnitude response, and determine the 3-dB frequency of the resulting filter.
30 Lowpass-to-Bandpass Transformation The lowpass-to-bandpass transformation utilizes a one-totwo mapping. In this way, the lowpass filter s single cutoff frequency becomes both the upper and lower cutoff frequencies required of the bandpass response. Or
31 Example A lowpass prototype filter is given as H p (s)= 2/s+2. Determine the lowpass-to-bandpass transformation rule to produce a bandpass filter H bp (s) with half-power (3 db) cutoff frequencies ω 1 = 1 rad/s and ω 2 =3 rad/s. Plot the magnitude response of the resulting bandpass filter.
32 Lowpass-to-Bandstop Transformation Much as the lowpass-to-highpass transformation reciprocally relates to the lowpass-to-lowpass transformation, the lowpass-to-bandstop transformation reciprocally relates to the lowpass-to-bandpass transformation. Or
 (s.^2+3).^2./(s.^4+2*sqrt(2)*s.^3+10*s.^2+6*sqrt(2)*s+9); omega = 0:.")
33 Example Apply a lowpass-to-bandstop transformation to the lowpass prototype Hp(s)= 1/ s 2 + 2s+1. The resulting bandstop filter should have 3-dB cutoff frequencies of 1 and 3 rad/s. Plot the magnitude response of the resulting filter. Solution Hbs (s.^2+3).^2./(s.^4+2*sqrt(2)*s.^3+10*s.^2+6*sqrt(2)*s+9); omega = 0:.01:6; plot(omega,abs(hbs(1j*omega))); xlabel('\omega'); ylabel(' H_{\rm bs}(\omega) ');
34 2.7 Practical Filter Families
35 Practical Filter Families Family of practical filters that are realizable (causal) and that possess rational transfer functions are: Butterworth Filters Chebyshev Filters Inverse Chebyshev Filters Elliptic Filters Bessel-Thomson Filters


36 Butterworth Filters The K poles of a K th order Butterworth filter are spaced equally by π/k radians around a half circle in the left hand side of the complex plane of radius ω c and centered at the origin. K = 4 K = 5
37 Butterworth Filters ω c = 1
38 Example Find the transfer function H(s) of a fourth-order lowpass Butterworth filter with a 3-dB cutoff frequency ω c = 10 by (a) frequency scaling the appropriate Table 2.2 entry and (b) direct calculation. Plot the magnitude response to verify filter characteristics.. Solution (a) (b) Find the poles using the equation in previous slide and then find the polynomial equation K = 4; k=1:k; omegac = 10; p = 1j*omegac*exp(1j*pi/(2*K)*(2*k-1)) A = poly(p) omega = linspace(0,35,1001); H = 10^4./polyval(A,1j*omega); plot(omega,abs(h)); xlabel('\omega'); ylabel(' H(j\omega) ');
39 Example (b) Find the poles using the equation and then find the polynomial equation. K = 4; k=1:k; omegac = 10; p = 1j*omegac*exp(1j*pi/(2*K)*(2*k-1)) A = poly(p) omega = linspace(0,35,1001); H = 10^4./polyval(A,1j*omega); plot(omega,abs(h)); xlabel('\omega'); ylabel(' H(j\omega) '); p = i i i i A =
40 Determination of Butterworth Filter Order and Half- Power Frequency In filter design you will be given the passband (ω p, α p ) and stopband (ω s, α s ) parameters and you need to calculate, the order of the filter and the half-power cutoff frequency that meets these parameters. Solve equation to determine lower limit for ω c Solve equation to determine upper limit for ω c
41 Example Design the lowest-order Butterworth lowpass filter that meets the specifications ω p 10 rad/s, α p 2 db, ω s 30 rad/s, and α s 20 db. Plot the corresponding magnitude response to verify that design requirements are met. Solution Step 1: Determine the filter order K from equation omegap = 10; alphap = 2; omegas = 30; alphas = 20; K = ceil(log((10^(alphas/10)-1)/(10^(alphap/10)-1))/(2*log(omegas/omegap))) K = 3 Step 2: Determine the range for the Half-Power cutoff frequency ω c omegac = [omegap/(10^(alphap/10)-1).^(1/(2*k)),omegas/(10^(alphas/10)-1).^(1/(2*k))] ω c = Choose ω c = 12.5
42 Continue Example Step 3: Determine the filter transfer function H(s) One way is to find the poles and then find H(s). omegac = 12.5; k = 1:K; A = poly(1j*omegac*exp(1j*pi/(2*k)*(2*k-1))) A = The second way it to start with the 3 rd order prototype lowpass filter 1 HH ss = ss 3 + 2ss 2 + 2ss + 1 and then apply lowpass-lowpass frequency transformation, s s(1/12.5) HH ss = ss ss ss
); plot(omega,abs(h)); Since the plot is not in db, the attenuation parameters are converted, the passband floor is 1 δ p = 10 αp/20 = 0.")
43 Continue Example omega = linspace(0,35,1001); H = omegac^k./(polyval(a,1j*omega)); plot(omega,abs(h)); Since the plot is not in db, the attenuation parameters are converted, the passband floor is 1 δ p = 10 αp/20 = , and the stopband ceiling is δ s = 10 αs/20 = 0.1. The plot shows the Butterworth responses corresponding to the limiting values of ω c, the ω c = curve exactly meets passband requirements and exceeds stopband requirements. Similarly, the ω c = curve exactly meets stopband requirements and exceeds passband requirements, ω c = 12.5 meets both requirements.
44 Example Design the lowest-order Butterworth bandpass filter that meets the specifications ω p1 10 rad/s, ω p2 20 rad/s, α p 2 db, ω s1 5 rad/s, ω s2 35 rad/s, and α s 20 db. Plot the corresponding magnitude response to verify that design requirements are met. Solution Step 1: Determine the Lowpass Prototype First we normalize the passband frequency ω p = 1 and then we calculate the stopband frequency ω s for both transition bands of the bandpass filter and choose the most restrictive ω s. omegap1 = 10; omegap2 = 20; omegas1 = 5; omegas2 = 35; omegap = 1; omegas = abs([omegap*(omegas1^2-omegap1*omegap2)/(omegas1*(omegap2-omegap1)),... omegap*(omegas2^2-omegap1*omegap2)/(omegas2*(omegap2-omegap1))]) Omegas = To meet the specifications of both transitions we choose the most restrictive which is the upper transition band, so ω s = , this will lead to a higher order filter K.
45 Continue Example Next we determine the filter order K from equation omegas = min(omegas); alphap = 2; alphas = 20; K = ceil(log((10^(alphas/10)-1)/(10^(alphap/10)-1))/(2*log(omegas/omegap))) K = 3 Next we calculate the range for the Half-Power cutoff frequency ω c K = 3, ω p =1, ω s =2.9286, α p =2, α s =20 omegac = [omegap/(10^(alphap/10)-1).^(1/(2*k)),omegas/(10^(alphas/10)-1).^(1/(2*k))] omegac = Choose the average for ω c = Next we transform the normalized 3 rd order prototype lowpass filter HH ss = s s(1/1.2276) ss 3 + 2ss 2 HH ss = + 2ss + 1 ss ss ss
46 Continue Example Step 2: We transform the prototype lowpass filter to the desired bandpass filter HH ss = 1.85 ss ss ss ss ss ss

47 Continue Example
48 Example-Matlab Code omegap1 = 10; omegap2 = 20; omegas1 = 5; omegas2 = 35; omegap = 1; omegas = abs([omegap*(omegas1^2-omegap1*omegap2)/(omegas1*(omegap2-omegap1)),... omegap*(omegas2^2-omegap1*omegap2)/(omegas2*(omegap2-omegap1))]); omegas = min(omegas); alphap = 2; alphas = 20; K = ceil(log((10^(alphas/10)-1)/(10^(alphap/10)-1))/(2*log(omegas/omegap))); omegac = [omegap/(10^(alphap/10)-1).^(1/(2*k)),omegas/(10^(alphas/10)-1).^(1/(2*k))]; omegac = mean(omegac); k = 1:K; pk = (1j*omegac*exp(1j*pi/(2*K)*(2*k-1))); A = poly(pk); a = 1; b = -pk*(omegap2-omegap1); c = omegap1*omegap2; pk = [(-b+sqrt(b.^2-4*a*c))./(2*a),(-b-sqrt(b.^2-4*a*c))./(2*a)]; B = (omegac^k)*((omegap2-omegap1)^k)*poly(zeros(k,1)); A = poly(pk); omega = linspace(0,40,1001); H = polyval(b,1j*omega)./polyval(a,1j*omega); plot(omega,abs(h));
49 Comparing Chebyshev and Butterworth Response The Chebyshev filter has a sharper cutoff (smaller transition band) than the same-order Butterworth filter, but this is achieved at the expense of inferior passband behavior (rippling instead of maximally flat). Chebyshev filters typically require lower order K than Butterworth filters to meet a given set of specifications.

50 Chebyshev Filters Type I The magnitude of the K th-order Chebyshev polynomial filter is K = 6 Or αα PP = 20log εε 2 αα PP = 10log εε 2 εε 2 = 10 αα PP/10 1 K = 7
51 Determination of Chebyshev Filter Order Replace ϵ and C K in the above equation using the equations below and solve for K εε 2 = 10 αα PP/10 1 Note: Computing Chebyshev filter order is identical to the Butterworth case except that logarithms are replaced with inverse hyperbolic cosines.
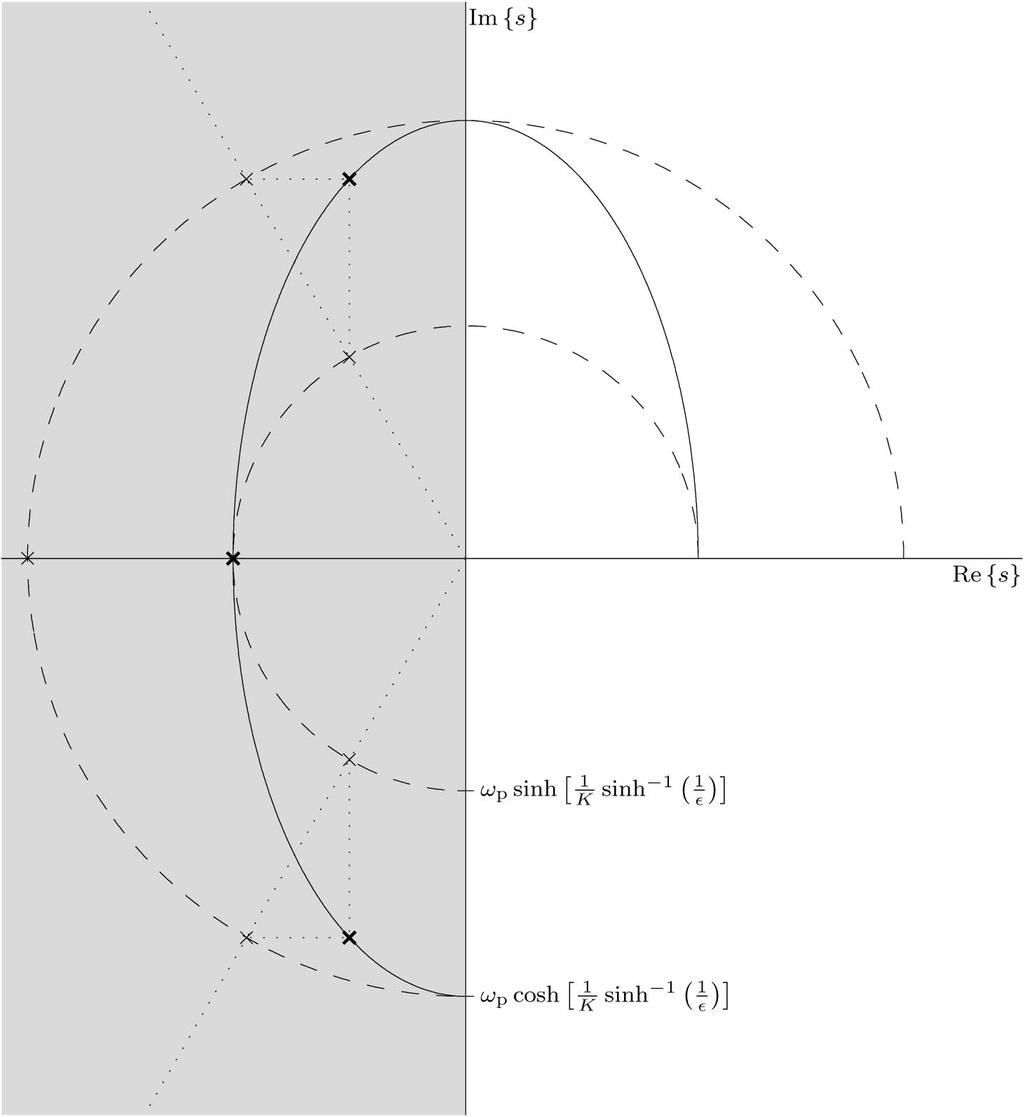
52 Determination of Chebyshev Poles and H(s) the Chebyshev filter poles, and thus its transfer function, are found by squaring the magnitude response, substituting ω = s/j to yield H(s)H( s), and then selecting the left half-plane denominator roots. Similar to how Butterworth poles lie on a semicircle, the poles of a Chebyshev lowpass filter lie on a semi-ellipse. There is a close relationship between pole locations on a Chebyshev ellipse and those on Butterworth circles: the real part of the Chebyshev poles coincide with those of an equivalentorder Butterworth filter with radius ω p sinh[1/k sinh -1 (1/ϵ)] and the imaginary part of the Chebyshev poles are equal to those of a Butterworth filter with radius ω p cosh[1/k sinh -1 (1/ϵ)].
53
54 Coefficients of normalized Chebyshev denominator polynomials
55 Coefficients of normalized Chebyshev denominator polynomials
56 Example Design the lowest-order Chebyshev lowpass filter that meets the specifications ω p 10 rad/s, α p 2 db, ω s 30 rad/s, and α s 20 db. Plot the corresponding magnitude response to verify that design requirements are met. Solution Step 1: Determine the filter order K from equation omegap = 10; alphap = 2; omegas = 30; alphas = 20; K = ceil(acosh(sqrt((10^(alphas/10)-1)/(10^(alphap/10)-1)))/acosh(omegas/omegap)) K = K = 2 Step 2: Determine the range for the passband cutoff frequency ω P by setting ω s = 30 and K = 2 and solve the above equation for ω P. omegap = [omegap,omegas/cosh(acosh(sqrt((10^(alphas/10)-1)/(10^(alphap/10)-1)))/k)] ω P = Choose the average so ω P =
57 Continue Example Step 3: Determine the prototype lowpass filter transfer function H(s) First we find ϵ, H(j0), poles, and then the lowpass prototype epsilon = sqrt(10^(alphap/10)-1); k = 1:K; H0 = (mod(k,2)==1)+(mod(k,2)==0)/sqrt(1+epsilon^2); pk = -omegap*sinh(asinh(1/epsilon)/k)*sin(pi*(2*k-1)/(2*k))+... 1j*omegap*cosh(asinh(1/epsilon)/K)*cos(pi*(2*k-1)/(2*K)); B = H0*prod(-pk), A = poly(pk) H(0) = B = H(0) *p 1 *p 2 = A = [ ] HH ss = ss ss Alternatively, the lowpass-to-lowpass transformation s s/ω p = s/ applied to the appropriate coefficients of Table 2.4 yields the same denominator
); plot(omega,abs(h)); HH ss = 74.3963 ss 2 + 8.")
58 Continue Example omega = linspace(0,35,1001); H = B./(polyval(A,1j*omega)); plot(omega,abs(h)); HH ss = ss ss
59 Example Design the lowest-order Chebyshev bandstop filter that meets the specifications ω P1 5 rad/s, ω P2 35, α p 2 db, ω s1 10 rad/s, ω s2 20 and α s 20 db. Plot the corresponding magnitude response to verify that design requirements are met. Solution Step 1: Determine the Lowpass Prototype First we normalize the stopband frequency ω S = 1 and then we calculate the passband frequency ω P for both transition bands of the bandpass filter and choose the most restrictive ω P. omegap1 = 5; omegap2 = 35; omegas1 = 10; omegas2 = 20; omegas = 1; omegap = abs([omegas*(omegap1*(omegas2-omegas1))/(-omegap1^2+omegas1*omegas2),... omegas*(omegap2*(omegas2-omegas1))/(-omegap2^2+omegas1*omegas2)]) ω P = To meet the specifications of both transitions we choose the most restrictive which is the upper transition band, so ω P = , this will lead to a higher order filter K.
60 Continue Example Next we determine the filter order K from equation omegap = max(omegap); alphap = 2; alphas = 20; K = ceil(acosh(sqrt((10^(alphas/10)-1)/(10^(alphap/10)-1)))/acosh(omegas/omegap)) K = 2 Determine the range for the stopband cutoff frequency ω S by setting ω P = and K = 2 and solve the above equation for ω S. omegas = mean([omegas,... omegap*cosh(acosh(sqrt((10^(alphas/10)-1)/(10^(alphap/10)-1)))/k)]) omegas = Choose the average to provide both passband and stopband buffer zones, so ω S =
61 Continue Example Next, since we adjusted ω S we recalculate ω P using the equation omegap = omegas/cosh(acosh(sqrt((10^(alphas/10)-1)/(10^(alphap/10)-1)))/k); omegap = ω P = Step 3: Determine the lowpass prototype filter transfer function H(s) First we find ϵ, H(j0), the poles, and then the lowpass prototype epsilon = sqrt(10^(alphap/10)-1); k = 1:K; pk = -omegap*sinh(asinh(1/epsilon)/k)*sin(pi*(2*k-1)/(2*k))+... 1j*omegap*cosh(asinh(1/epsilon)/K)*cos(pi*(2*k-1)/(2*K)); H0 = mod(k,2)+mod(k+1,2)/sqrt(1+epsilon^2); B = H0*prod(-pk), A = poly(pk) H(0) = B = H(0) *p 1 *p 2 = A = [ ] HH ss = ss ss

62 Continue Example Step 4: Determine the bandpass filter transfer function H(s) by transformation HH ss = ss ss ss 10ss ss HH ss = ss ss ss ss ss ss
63 Continue Example (Matlab Code) omegap1 = 5; omegap2 = 35; omegas1 = 10; omegas2 = 20; omegas = 1; omegap = abs([omegas*(omegap1*(omegas2-omegas1))/(- omegap1^2+omegas1*omegas2),... omegas*(omegap2*(omegas2-omegas1))/(-omegap2^2+omegas1*omegas2)]) omegap = max(omegap); alphap = 2; alphas = 20; K = ceil(acosh(sqrt((10^(alphas/10)-1)/(10^(alphap/10)-1)))/acosh(omegas/omegap)) omegas = mean([omegas,... omegap*cosh(acosh(sqrt((10^(alphas/10)-1)/(10^(alphap/10)-1)))/k)]) omegap = omegas/cosh(acosh(sqrt((10^(alphas/10)-1)/(10^(alphap/10)-1)))/k); epsilon = sqrt(10^(alphap/10)-1); k = 1:K; pk = -omegap*sinh(asinh(1/epsilon)/k)*sin(pi*(2*k-1)/(2*k))+... 1j*omegap*cosh(asinh(1/epsilon)/K)*cos(pi*(2*k-1)/(2*K)); H0 = mod(k,2)+mod(k+1,2)/sqrt(1+epsilon^2); B = H0*prod(-pk), A = poly(pk) a = 1; b = -(omegas2-omegas1)./pk; c = omegas1*omegas2; B = B/prod(-pk)*poly([1j*sqrt(c)*ones(K,1);-1j*sqrt(c)*ones(K,1)]) A = poly([(-b+sqrt(b.^2-4*a.*c))./(2*a),(-b-sqrt(b.^2-4*a.*c))./(2*a)]) omega = linspace(0,100,1001); H = polyval(b,1j*omega)./polyval(a,1j*omega); plot(omega,abs(h));
64 Inverse Chebyshev Filters Type II The magnitude response exhibits a maximally flat passband and an equiripple stopband. While Butterworth and Chebyshev type 1 filters have finite poles and no finite zeros, the inverse Chebyshev has both finite poles and zeros. The presence of zeros enhance the frequency response but the decay rate for ω > ω s is slower. The inverse Chebyshev response can be obtained from a Chebyshev response in two steps. To begin, let H c (ω) be a lowpass Chebyshev magnitude response with passband edge ω p and ripple parameter ϵ, as shown in Fig. a. In the first step, we subtract H c (ω) 2 from 1 to obtain the response shown in Fig. b. In the second step, we interchange the stopband and passband with the lowpass-to-highpass transformation of ω ω p ω s /ω yields the inverse Chebyshev response, shown in Fig. c.
65 Elliptic Filters and Bessel-Thomson Filters Elliptic Filters Chebyshev filters have a smaller transition bands compared with that of a Butterworth filter because Chebyshev filters allow rippling in either the passband or stopband. Elliptic filter allows ripple in both the passband and the stopband, so it achieves a further reduction in the transition band. For a given transition band, an elliptic filter provides the largest ratio of the passband gain to stopband gain, or for a given ratio of passband to stopband gain, it requires the smallest transition band. Bessel-Thomson Filters Unlike the previous filters, where we approximate the magnitude response without paying attention to the phase response, the Bessel-Thomson filter is designed for maximally flat time delay over a bandwidth of interest. This means that the phase response is designed to be as linear as possible over a given bandwidth. Bessel-Thomson filters are superior to the filters discussed so far in terms of the phase linearity or flatness of the time delay. However, they do not fair so well in terms of the flatness of the magnitude response.
Analog Lowpass Filter Specifications
 Analog Lowpass Filter Specifications Typical magnitude response analog lowpass filter may be given as indicated below H a ( j of an Copyright 005, S. K. Mitra Analog Lowpass Filter Specifications In the
Analog Lowpass Filter Specifications Typical magnitude response analog lowpass filter may be given as indicated below H a ( j of an Copyright 005, S. K. Mitra Analog Lowpass Filter Specifications In the
LECTURER NOTE SMJE3163 DSP
 LECTURER NOTE SMJE363 DSP (04/05-) ------------------------------------------------------------------------- Week3 IIR Filter Design -------------------------------------------------------------------------
LECTURER NOTE SMJE363 DSP (04/05-) ------------------------------------------------------------------------- Week3 IIR Filter Design -------------------------------------------------------------------------
NH 67, Karur Trichy Highways, Puliyur C.F, Karur District DEPARTMENT OF INFORMATION TECHNOLOGY DIGITAL SIGNAL PROCESSING UNIT 3
 NH 67, Karur Trichy Highways, Puliyur C.F, 639 114 Karur District DEPARTMENT OF INFORMATION TECHNOLOGY DIGITAL SIGNAL PROCESSING UNIT 3 IIR FILTER DESIGN Structure of IIR System design of Discrete time
NH 67, Karur Trichy Highways, Puliyur C.F, 639 114 Karur District DEPARTMENT OF INFORMATION TECHNOLOGY DIGITAL SIGNAL PROCESSING UNIT 3 IIR FILTER DESIGN Structure of IIR System design of Discrete time
Digital Processing of Continuous-Time Signals
 Chapter 4 Digital Processing of Continuous-Time Signals 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 4-1-1 Digital Processing of Continuous-Time Signals Digital
Chapter 4 Digital Processing of Continuous-Time Signals 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 4-1-1 Digital Processing of Continuous-Time Signals Digital
3 Analog filters. 3.1 Analog filter characteristics
 Chapter 3, page 1 of 11 3 Analog filters This chapter deals with analog filters and the filter approximations of an ideal filter. The filter approximations that are considered are the classical analog
Chapter 3, page 1 of 11 3 Analog filters This chapter deals with analog filters and the filter approximations of an ideal filter. The filter approximations that are considered are the classical analog
Digital Processing of
 Chapter 4 Digital Processing of Continuous-Time Signals 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 4-1-1 Digital Processing of Continuous-Time Signals Digital
Chapter 4 Digital Processing of Continuous-Time Signals 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 4-1-1 Digital Processing of Continuous-Time Signals Digital
(i) Understanding of the characteristics of linear-phase finite impulse response (FIR) filters
 Understanding of the characteristics of linear-phase finite impulse response (FIR) filters") FIR Filter Design Chapter Intended Learning Outcomes: (i) Understanding of the characteristics of linear-phase finite impulse response (FIR) filters (ii) Ability to design linear-phase FIR filters according
FIR Filter Design Chapter Intended Learning Outcomes: (i) Understanding of the characteristics of linear-phase finite impulse response (FIR) filters (ii) Ability to design linear-phase FIR filters according
(i) Understanding of the characteristics of linear-phase finite impulse response (FIR) filters
 Understanding of the characteristics of linear-phase finite impulse response (FIR) filters") FIR Filter Design Chapter Intended Learning Outcomes: (i) Understanding of the characteristics of linear-phase finite impulse response (FIR) filters (ii) Ability to design linear-phase FIR filters according
FIR Filter Design Chapter Intended Learning Outcomes: (i) Understanding of the characteristics of linear-phase finite impulse response (FIR) filters (ii) Ability to design linear-phase FIR filters according
NOVEMBER 13, 1996 EE 4773/6773: LECTURE NO. 37 PAGE 1 of 5
 NOVEMBER 3, 996 EE 4773/6773: LECTURE NO. 37 PAGE of 5 Characteristics of Commonly Used Analog Filters - Butterworth Butterworth filters are maimally flat in the passband and stopband, giving monotonicity
NOVEMBER 3, 996 EE 4773/6773: LECTURE NO. 37 PAGE of 5 Characteristics of Commonly Used Analog Filters - Butterworth Butterworth filters are maimally flat in the passband and stopband, giving monotonicity
Infinite Impulse Response (IIR) Filter. Ikhwannul Kholis, ST., MT. Universitas 17 Agustus 1945 Jakarta
 Filter. Ikhwannul Kholis, ST., MT. Universitas 17 Agustus 1945 Jakarta") Infinite Impulse Response (IIR) Filter Ihwannul Kholis, ST., MT. Universitas 17 Agustus 1945 Jaarta The Outline 8.1 State-of-the-art 8.2 Coefficient Calculation Method for IIR Filter 8.2.1 Pole-Zero Placement
Infinite Impulse Response (IIR) Filter Ihwannul Kholis, ST., MT. Universitas 17 Agustus 1945 Jaarta The Outline 8.1 State-of-the-art 8.2 Coefficient Calculation Method for IIR Filter 8.2.1 Pole-Zero Placement
Electric Circuit Theory
 Electric Circuit Theory Nam Ki Min nkmin@korea.ac.kr 010-9419-2320 Chapter 15 Active Filter Circuits Nam Ki Min nkmin@korea.ac.kr 010-9419-2320 Contents and Objectives 3 Chapter Contents 15.1 First-Order
Electric Circuit Theory Nam Ki Min nkmin@korea.ac.kr 010-9419-2320 Chapter 15 Active Filter Circuits Nam Ki Min nkmin@korea.ac.kr 010-9419-2320 Contents and Objectives 3 Chapter Contents 15.1 First-Order
Filters and Tuned Amplifiers
 CHAPTER 6 Filters and Tuned Amplifiers Introduction 55 6. Filter Transmission, Types, and Specification 56 6. The Filter Transfer Function 60 6.7 Second-Order Active Filters Based on the Two-Integrator-Loop
CHAPTER 6 Filters and Tuned Amplifiers Introduction 55 6. Filter Transmission, Types, and Specification 56 6. The Filter Transfer Function 60 6.7 Second-Order Active Filters Based on the Two-Integrator-Loop
IIR Filter Design Chapter Intended Learning Outcomes: (i) Ability to design analog Butterworth filters
 Ability to design analog Butterworth filters") IIR Filter Design Chapter Intended Learning Outcomes: (i) Ability to design analog Butterworth filters (ii) Ability to design lowpass IIR filters according to predefined specifications based on analog
IIR Filter Design Chapter Intended Learning Outcomes: (i) Ability to design analog Butterworth filters (ii) Ability to design lowpass IIR filters according to predefined specifications based on analog
DIGITAL FILTERS. !! Finite Impulse Response (FIR) !! Infinite Impulse Response (IIR) !! Background. !! Matlab functions AGC DSP AGC DSP
 !! Infinite Impulse Response (IIR) !! Background. !! Matlab functions AGC DSP AGC DSP") DIGITAL FILTERS!! Finite Impulse Response (FIR)!! Infinite Impulse Response (IIR)!! Background!! Matlab functions 1!! Only the magnitude approximation problem!! Four basic types of ideal filters with magnitude
DIGITAL FILTERS!! Finite Impulse Response (FIR)!! Infinite Impulse Response (IIR)!! Background!! Matlab functions 1!! Only the magnitude approximation problem!! Four basic types of ideal filters with magnitude
ECE 203 LAB 2 PRACTICAL FILTER DESIGN & IMPLEMENTATION
 Version 1. 1 of 7 ECE 03 LAB PRACTICAL FILTER DESIGN & IMPLEMENTATION BEFORE YOU BEGIN PREREQUISITE LABS ECE 01 Labs ECE 0 Advanced MATLAB ECE 03 MATLAB Signals & Systems EXPECTED KNOWLEDGE Understanding
Version 1. 1 of 7 ECE 03 LAB PRACTICAL FILTER DESIGN & IMPLEMENTATION BEFORE YOU BEGIN PREREQUISITE LABS ECE 01 Labs ECE 0 Advanced MATLAB ECE 03 MATLAB Signals & Systems EXPECTED KNOWLEDGE Understanding
ECE503: Digital Filter Design Lecture 9
 ECE503: Digital Filter Design Lecture 9 D. Richard Brown III WPI 26-March-2012 WPI D. Richard Brown III 26-March-2012 1 / 33 Lecture 9 Topics Within the broad topic of digital filter design, we are going
ECE503: Digital Filter Design Lecture 9 D. Richard Brown III WPI 26-March-2012 WPI D. Richard Brown III 26-March-2012 1 / 33 Lecture 9 Topics Within the broad topic of digital filter design, we are going
CHAPTER 8 ANALOG FILTERS
 ANALOG FILTERS CHAPTER 8 ANALOG FILTERS SECTION 8.: INTRODUCTION 8. SECTION 8.2: THE TRANSFER FUNCTION 8.5 THE SPLANE 8.5 F O and Q 8.7 HIGHPASS FILTER 8.8 BANDPASS FILTER 8.9 BANDREJECT (NOTCH) FILTER
ANALOG FILTERS CHAPTER 8 ANALOG FILTERS SECTION 8.: INTRODUCTION 8. SECTION 8.2: THE TRANSFER FUNCTION 8.5 THE SPLANE 8.5 F O and Q 8.7 HIGHPASS FILTER 8.8 BANDPASS FILTER 8.9 BANDREJECT (NOTCH) FILTER
Continuous-Time Signal Analysis FOURIER Transform - Applications DR. SIGIT PW JAROT ECE 2221
 Continuous-Time Signal Analysis FOURIER Transform - Applications DR. SIGIT PW JAROT ECE 2221 Inspiring Message from Imam Shafii You will not acquire knowledge unless you have 6 (SIX) THINGS Intelligence
Continuous-Time Signal Analysis FOURIER Transform - Applications DR. SIGIT PW JAROT ECE 2221 Inspiring Message from Imam Shafii You will not acquire knowledge unless you have 6 (SIX) THINGS Intelligence
8: IIR Filter Transformations
 DSP and Digital (5-677) IIR : 8 / Classical continuous-time filters optimize tradeoff: passband ripple v stopband ripple v transition width There are explicit formulae for pole/zero positions. Butterworth:
DSP and Digital (5-677) IIR : 8 / Classical continuous-time filters optimize tradeoff: passband ripple v stopband ripple v transition width There are explicit formulae for pole/zero positions. Butterworth:
Part B. Simple Digital Filters. 1. Simple FIR Digital Filters
 Simple Digital Filters Chapter 7B Part B Simple FIR Digital Filters LTI Discrete-Time Systems in the Transform-Domain Simple Digital Filters Simple IIR Digital Filters Comb Filters 3. Simple FIR Digital
Simple Digital Filters Chapter 7B Part B Simple FIR Digital Filters LTI Discrete-Time Systems in the Transform-Domain Simple Digital Filters Simple IIR Digital Filters Comb Filters 3. Simple FIR Digital
EEM478-DSPHARDWARE. WEEK12:FIR & IIR Filter Design
 EEM478-DSPHARDWARE WEEK12:FIR & IIR Filter Design PART-I : Filter Design/Realization Step-1 : define filter specs (pass-band, stop-band, optimization criterion, ) Step-2 : derive optimal transfer function
EEM478-DSPHARDWARE WEEK12:FIR & IIR Filter Design PART-I : Filter Design/Realization Step-1 : define filter specs (pass-band, stop-band, optimization criterion, ) Step-2 : derive optimal transfer function
(Refer Slide Time: 02:00-04:20) (Refer Slide Time: 04:27 09:06)
 (Refer Slide Time: 04:27 09:06)") Digital Signal Processing Prof. S. C. Dutta Roy Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 25 Analog Filter Design (Contd.); Transformations This is the 25 th
Digital Signal Processing Prof. S. C. Dutta Roy Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 25 Analog Filter Design (Contd.); Transformations This is the 25 th
The University of Texas at Austin Dept. of Electrical and Computer Engineering Final Exam
 The University of Texas at Austin Dept. of Electrical and Computer Engineering Final Exam Date: December 18, 2017 Course: EE 313 Evans Name: Last, First The exam is scheduled to last three hours. Open
The University of Texas at Austin Dept. of Electrical and Computer Engineering Final Exam Date: December 18, 2017 Course: EE 313 Evans Name: Last, First The exam is scheduled to last three hours. Open
4/14/15 8:58 PM C:\Users\Harrn...\tlh2polebutter10rad see.rn 1 of 1
 4/14/15 8:58 PM C:\Users\Harrn...\tlh2polebutter10rad see.rn 1 of 1 % Example 2pole butter tlh % Analog Butterworth filter design % design an 2-pole filter with a bandwidth of 10 rad/sec % Prototype H(s)
4/14/15 8:58 PM C:\Users\Harrn...\tlh2polebutter10rad see.rn 1 of 1 % Example 2pole butter tlh % Analog Butterworth filter design % design an 2-pole filter with a bandwidth of 10 rad/sec % Prototype H(s)
EEO 401 Digital Signal Processing Prof. Mark Fowler
 EEO 4 Digital Signal Processing Prof. Mark Fowler Note Set #34 IIR Design Characteristics of Common Analog Filters Reading: Sect..3.4 &.3.5 of Proakis & Manolakis /6 Motivation We ve seenthat the Bilinear
EEO 4 Digital Signal Processing Prof. Mark Fowler Note Set #34 IIR Design Characteristics of Common Analog Filters Reading: Sect..3.4 &.3.5 of Proakis & Manolakis /6 Motivation We ve seenthat the Bilinear
PHYS225 Lecture 15. Electronic Circuits
 PHYS225 Lecture 15 Electronic Circuits Last lecture Difference amplifier Differential input; single output Good CMRR, accurate gain, moderate input impedance Instrumentation amplifier Differential input;
PHYS225 Lecture 15 Electronic Circuits Last lecture Difference amplifier Differential input; single output Good CMRR, accurate gain, moderate input impedance Instrumentation amplifier Differential input;
F I R Filter (Finite Impulse Response)
") F I R Filter (Finite Impulse Response) Ir. Dadang Gunawan, Ph.D Electrical Engineering University of Indonesia The Outline 7.1 State-of-the-art 7.2 Type of Linear Phase Filter 7.3 Summary of 4 Types FIR
F I R Filter (Finite Impulse Response) Ir. Dadang Gunawan, Ph.D Electrical Engineering University of Indonesia The Outline 7.1 State-of-the-art 7.2 Type of Linear Phase Filter 7.3 Summary of 4 Types FIR
APPENDIX A to VOLUME A1 TIMS FILTER RESPONSES
 APPENDIX A to VOLUME A1 TIMS FILTER RESPONSES A2 TABLE OF CONTENTS... 5 Filter Specifications... 7 3 khz LPF (within the HEADPHONE AMPLIFIER)... 8 TUNEABLE LPF... 9 BASEBAND CHANNEL FILTERS - #2 Butterworth
APPENDIX A to VOLUME A1 TIMS FILTER RESPONSES A2 TABLE OF CONTENTS... 5 Filter Specifications... 7 3 khz LPF (within the HEADPHONE AMPLIFIER)... 8 TUNEABLE LPF... 9 BASEBAND CHANNEL FILTERS - #2 Butterworth
The University of Texas at Austin Dept. of Electrical and Computer Engineering Midterm #2
 The University of Texas at Austin Dept. of Electrical and Computer Engineering Midterm #2 Date: November 18, 2010 Course: EE 313 Evans Name: Last, First The exam is scheduled to last 75 minutes. Open books
The University of Texas at Austin Dept. of Electrical and Computer Engineering Midterm #2 Date: November 18, 2010 Course: EE 313 Evans Name: Last, First The exam is scheduled to last 75 minutes. Open books
Review of Filter Types
 ECE 440 FILTERS Review of Filters Filters are systems with amplitude and phase response that depends on frequency. Filters named by amplitude attenuation with relation to a transition or cutoff frequency.
ECE 440 FILTERS Review of Filters Filters are systems with amplitude and phase response that depends on frequency. Filters named by amplitude attenuation with relation to a transition or cutoff frequency.
DSP Laboratory (EELE 4110) Lab#10 Finite Impulse Response (FIR) Filters
 Lab#10 Finite Impulse Response (FIR) Filters") Islamic University of Gaza OBJECTIVES: Faculty of Engineering Electrical Engineering Department Spring-2011 DSP Laboratory (EELE 4110) Lab#10 Finite Impulse Response (FIR) Filters To demonstrate the concept
Islamic University of Gaza OBJECTIVES: Faculty of Engineering Electrical Engineering Department Spring-2011 DSP Laboratory (EELE 4110) Lab#10 Finite Impulse Response (FIR) Filters To demonstrate the concept
Using the isppac 80 Programmable Lowpass Filter IC
 Using the isppac Programmable Lowpass Filter IC Introduction This application note describes the isppac, an In- System Programmable (ISP ) Analog Circuit from Lattice Semiconductor, and the filters that
Using the isppac Programmable Lowpass Filter IC Introduction This application note describes the isppac, an In- System Programmable (ISP ) Analog Circuit from Lattice Semiconductor, and the filters that
Signals and Systems Lecture 6: Fourier Applications
 Signals and Systems Lecture 6: Fourier Applications Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Winter 2012 arzaneh Abdollahi Signal and Systems Lecture 6
Signals and Systems Lecture 6: Fourier Applications Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Winter 2012 arzaneh Abdollahi Signal and Systems Lecture 6
ECE438 - Laboratory 7a: Digital Filter Design (Week 1) By Prof. Charles Bouman and Prof. Mireille Boutin Fall 2015
 By Prof. Charles Bouman and Prof. Mireille Boutin Fall 2015") Purdue University: ECE438 - Digital Signal Processing with Applications 1 ECE438 - Laboratory 7a: Digital Filter Design (Week 1) By Prof. Charles Bouman and Prof. Mireille Boutin Fall 2015 1 Introduction
Purdue University: ECE438 - Digital Signal Processing with Applications 1 ECE438 - Laboratory 7a: Digital Filter Design (Week 1) By Prof. Charles Bouman and Prof. Mireille Boutin Fall 2015 1 Introduction
Filter Approximation Concepts
 6 (ESS) Filter Approximation Concepts How do you translate filter specifications into a mathematical expression which can be synthesized? Approximation Techniques Why an ideal Brick Wall Filter can not
6 (ESS) Filter Approximation Concepts How do you translate filter specifications into a mathematical expression which can be synthesized? Approximation Techniques Why an ideal Brick Wall Filter can not
Active Filter Design Techniques
 Active Filter Design Techniques 16.1 Introduction What is a filter? A filter is a device that passes electric signals at certain frequencies or frequency ranges while preventing the passage of others.
Active Filter Design Techniques 16.1 Introduction What is a filter? A filter is a device that passes electric signals at certain frequencies or frequency ranges while preventing the passage of others.
Poles and Zeros of H(s), Analog Computers and Active Filters
, Analog Computers and Active Filters") Poles and Zeros of H(s), Analog Computers and Active Filters Physics116A, Draft10/28/09 D. Pellett LRC Filter Poles and Zeros Pole structure same for all three functions (two poles) HR has two poles and
Poles and Zeros of H(s), Analog Computers and Active Filters Physics116A, Draft10/28/09 D. Pellett LRC Filter Poles and Zeros Pole structure same for all three functions (two poles) HR has two poles and
Digital Filters IIR (& Their Corresponding Analog Filters) Week Date Lecture Title
 Week Date Lecture Title") http://elec3004.com Digital Filters IIR (& Their Corresponding Analog Filters) 2017 School of Information Technology and Electrical Engineering at The University of Queensland Lecture Schedule: Week Date
http://elec3004.com Digital Filters IIR (& Their Corresponding Analog Filters) 2017 School of Information Technology and Electrical Engineering at The University of Queensland Lecture Schedule: Week Date
Experiment 4- Finite Impulse Response Filters
 Experiment 4- Finite Impulse Response Filters 18 February 2009 Abstract In this experiment we design different Finite Impulse Response filters and study their characteristics. 1 Introduction The transfer
Experiment 4- Finite Impulse Response Filters 18 February 2009 Abstract In this experiment we design different Finite Impulse Response filters and study their characteristics. 1 Introduction The transfer
George Mason University Signals and Systems I Spring 2016
 George Mason University Signals and Systems I Spring 2016 Laboratory Project #4 Assigned: Week of March 14, 2016 Due Date: Laboratory Section, Week of April 4, 2016 Report Format and Guidelines for Laboratory
George Mason University Signals and Systems I Spring 2016 Laboratory Project #4 Assigned: Week of March 14, 2016 Due Date: Laboratory Section, Week of April 4, 2016 Report Format and Guidelines for Laboratory
Chapter 7 Filter Design Techniques. Filter Design Techniques
 Chapter 7 Filter Design Techniques Page 1 Outline 7.0 Introduction 7.1 Design of Discrete Time IIR Filters 7.2 Design of FIR Filters Page 2 7.0 Introduction Definition of Filter Filter is a system that
Chapter 7 Filter Design Techniques Page 1 Outline 7.0 Introduction 7.1 Design of Discrete Time IIR Filters 7.2 Design of FIR Filters Page 2 7.0 Introduction Definition of Filter Filter is a system that
Kerwin, W.J. Passive Signal Processing The Electrical Engineering Handbook Ed. Richard C. Dorf Boca Raton: CRC Press LLC, 2000
 Kerwin, W.J. Passive Signal Processing The Electrical Engineering Handbook Ed. Richard C. Dorf Boca Raton: CRC Press LLC, 000 4 Passive Signal Processing William J. Kerwin University of Arizona 4. Introduction
Kerwin, W.J. Passive Signal Processing The Electrical Engineering Handbook Ed. Richard C. Dorf Boca Raton: CRC Press LLC, 000 4 Passive Signal Processing William J. Kerwin University of Arizona 4. Introduction
Fourier Transform Analysis of Signals and Systems
 Fourier Transform Analysis of Signals and Systems Ideal Filters Filters separate what is desired from what is not desired In the signals and systems context a filter separates signals in one frequency
Fourier Transform Analysis of Signals and Systems Ideal Filters Filters separate what is desired from what is not desired In the signals and systems context a filter separates signals in one frequency
Dorf, R.C., Wan, Z. Transfer Functions of Filters The Electrical Engineering Handbook Ed. Richard C. Dorf Boca Raton: CRC Press LLC, 2000
 Dorf, R.C., Wan, Z. Transfer Functions of Filters The Electrical Engineering Handbook Ed. Richard C. Dorf oca Raton: CRC Press LLC, Transfer Functions of Filters Richard C. Dorf University of California,
Dorf, R.C., Wan, Z. Transfer Functions of Filters The Electrical Engineering Handbook Ed. Richard C. Dorf oca Raton: CRC Press LLC, Transfer Functions of Filters Richard C. Dorf University of California,
Electronic PRINCIPLES
 MALVINO & BATES Electronic PRINCIPLES SEVENTH EDITION Chapter 21 Active Filters Topics Covered in Chapter 21 Ideal responses Approximate responses Passive ilters First-order stages VCVS unity-gain second-order
MALVINO & BATES Electronic PRINCIPLES SEVENTH EDITION Chapter 21 Active Filters Topics Covered in Chapter 21 Ideal responses Approximate responses Passive ilters First-order stages VCVS unity-gain second-order
Digital Filters IIR (& Their Corresponding Analog Filters) 4 April 2017 ELEC 3004: Systems 1. Week Date Lecture Title
 4 April 2017 ELEC 3004: Systems 1. Week Date Lecture Title") http://elec3004.com Digital Filters IIR (& Their Corresponding Analog Filters) 4 April 017 ELEC 3004: Systems 1 017 School of Information Technology and Electrical Engineering at The University of Queensland
http://elec3004.com Digital Filters IIR (& Their Corresponding Analog Filters) 4 April 017 ELEC 3004: Systems 1 017 School of Information Technology and Electrical Engineering at The University of Queensland
Signals and Filtering
 FILTERING OBJECTIVES The objectives of this lecture are to: Introduce signal filtering concepts Introduce filter performance criteria Introduce Finite Impulse Response (FIR) filters Introduce Infinite
FILTERING OBJECTIVES The objectives of this lecture are to: Introduce signal filtering concepts Introduce filter performance criteria Introduce Finite Impulse Response (FIR) filters Introduce Infinite
EELE 4310: Digital Signal Processing (DSP)
") EELE 4310: Digital Signal Processing (DSP) Chapter # 10 : Digital Filter Design (Part One) Spring, 2012/2013 EELE 4310: Digital Signal Processing (DSP) - Ch.10 Dr. Musbah Shaat 1 / 19 Outline 1 Introduction
EELE 4310: Digital Signal Processing (DSP) Chapter # 10 : Digital Filter Design (Part One) Spring, 2012/2013 EELE 4310: Digital Signal Processing (DSP) - Ch.10 Dr. Musbah Shaat 1 / 19 Outline 1 Introduction
Transfer function: a mathematical description of network response characteristics.
 Microwave Filter Design Chp3. Basic Concept and Theories of Filters Prof. Tzong-Lin Wu Department of Electrical Engineering National Taiwan University Transfer Functions General Definitions Transfer function:
Microwave Filter Design Chp3. Basic Concept and Theories of Filters Prof. Tzong-Lin Wu Department of Electrical Engineering National Taiwan University Transfer Functions General Definitions Transfer function:
Boise State University Department of Electrical and Computer Engineering ECE 212L Circuit Analysis and Design Lab
 Objectives Boise State University Department of Electrical and Computer Engineering ECE L Circuit Analysis and Design Lab Experiment #0: Frequency esponse Measurements The objectives of this laboratory
Objectives Boise State University Department of Electrical and Computer Engineering ECE L Circuit Analysis and Design Lab Experiment #0: Frequency esponse Measurements The objectives of this laboratory
ELEC-C5230 Digitaalisen signaalinkäsittelyn perusteet
 ELEC-C5230 Digitaalisen signaalinkäsittelyn perusteet Lecture 10: Summary Taneli Riihonen 16.05.2016 Lecture 10 in Course Book Sanjit K. Mitra, Digital Signal Processing: A Computer-Based Approach, 4th
ELEC-C5230 Digitaalisen signaalinkäsittelyn perusteet Lecture 10: Summary Taneli Riihonen 16.05.2016 Lecture 10 in Course Book Sanjit K. Mitra, Digital Signal Processing: A Computer-Based Approach, 4th
Signals and Systems Lecture 6: Fourier Applications
 Signals and Systems Lecture 6: Fourier Applications Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Winter 2012 arzaneh Abdollahi Signal and Systems Lecture 6
Signals and Systems Lecture 6: Fourier Applications Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Winter 2012 arzaneh Abdollahi Signal and Systems Lecture 6
1 PeZ: Introduction. 1.1 Controls for PeZ using pezdemo. Lab 15b: FIR Filter Design and PeZ: The z, n, and O! Domains
 DSP First, 2e Signal Processing First Lab 5b: FIR Filter Design and PeZ: The z, n, and O! Domains The lab report/verification will be done by filling in the last page of this handout which addresses a
DSP First, 2e Signal Processing First Lab 5b: FIR Filter Design and PeZ: The z, n, and O! Domains The lab report/verification will be done by filling in the last page of this handout which addresses a
E Final Exam Solutions page 1/ gain / db Imaginary Part
 E48 Digital Signal Processing Exam date: Tuesday 242 Final Exam Solutions Dan Ellis . The only twist here is to notice that the elliptical filter is actually high-pass, since it has
E48 Digital Signal Processing Exam date: Tuesday 242 Final Exam Solutions Dan Ellis . The only twist here is to notice that the elliptical filter is actually high-pass, since it has
PYKC 13 Feb 2017 EA2.3 Electronics 2 Lecture 8-1
 In this lecture, I will cover amplitude and phase responses of a system in some details. What I will attempt to do is to explain how would one be able to obtain the frequency response from the transfer
In this lecture, I will cover amplitude and phase responses of a system in some details. What I will attempt to do is to explain how would one be able to obtain the frequency response from the transfer
Design Digital Non-Recursive FIR Filter by Using Exponential Window
 International Journal of Emerging Engineering Research and Technology Volume 3, Issue 3, March 2015, PP 51-61 ISSN 2349-4395 (Print) & ISSN 2349-4409 (Online) Design Digital Non-Recursive FIR Filter by
International Journal of Emerging Engineering Research and Technology Volume 3, Issue 3, March 2015, PP 51-61 ISSN 2349-4395 (Print) & ISSN 2349-4409 (Online) Design Digital Non-Recursive FIR Filter by
2.1 BASIC CONCEPTS Basic Operations on Signals Time Shifting. Figure 2.2 Time shifting of a signal. Time Reversal.
 1 2.1 BASIC CONCEPTS 2.1.1 Basic Operations on Signals Time Shifting. Figure 2.2 Time shifting of a signal. Time Reversal. 2 Time Scaling. Figure 2.4 Time scaling of a signal. 2.1.2 Classification of Signals
1 2.1 BASIC CONCEPTS 2.1.1 Basic Operations on Signals Time Shifting. Figure 2.2 Time shifting of a signal. Time Reversal. 2 Time Scaling. Figure 2.4 Time scaling of a signal. 2.1.2 Classification of Signals
Final Exam Solutions June 14, 2006
 Name or 6-Digit Code: PSU Student ID Number: Final Exam Solutions June 14, 2006 ECE 223: Signals & Systems II Dr. McNames Keep your exam flat during the entire exam. If you have to leave the exam temporarily,
Name or 6-Digit Code: PSU Student ID Number: Final Exam Solutions June 14, 2006 ECE 223: Signals & Systems II Dr. McNames Keep your exam flat during the entire exam. If you have to leave the exam temporarily,
Advanced Digital Signal Processing Part 5: Digital Filters
 Advanced Digital Signal Processing Part 5: Digital Filters Gerhard Schmidt Christian-Albrechts-Universität zu Kiel Faculty of Engineering Institute of Electrical and Information Engineering Digital Signal
Advanced Digital Signal Processing Part 5: Digital Filters Gerhard Schmidt Christian-Albrechts-Universität zu Kiel Faculty of Engineering Institute of Electrical and Information Engineering Digital Signal
Frequency Response Analysis
 Frequency Response Analysis Continuous Time * M. J. Roberts - All Rights Reserved 2 Frequency Response * M. J. Roberts - All Rights Reserved 3 Lowpass Filter H( s) = ω c s + ω c H( jω ) = ω c jω + ω c
Frequency Response Analysis Continuous Time * M. J. Roberts - All Rights Reserved 2 Frequency Response * M. J. Roberts - All Rights Reserved 3 Lowpass Filter H( s) = ω c s + ω c H( jω ) = ω c jω + ω c
Active Filters - Revisited
 Active Filters - Revisited Sources: Electronic Devices by Thomas L. Floyd. & Electronic Devices and Circuit Theory by Robert L. Boylestad, Louis Nashelsky Ideal and Practical Filters Ideal and Practical
Active Filters - Revisited Sources: Electronic Devices by Thomas L. Floyd. & Electronic Devices and Circuit Theory by Robert L. Boylestad, Louis Nashelsky Ideal and Practical Filters Ideal and Practical
ECE 4213/5213 Homework 10
 Fall 2017 ECE 4213/5213 Homework 10 Dr. Havlicek Work the Projects and Questions in Chapter 7 of the course laboratory manual. For your report, use the file LABEX7.doc from the course web site. Work these
Fall 2017 ECE 4213/5213 Homework 10 Dr. Havlicek Work the Projects and Questions in Chapter 7 of the course laboratory manual. For your report, use the file LABEX7.doc from the course web site. Work these
CS3291: Digital Signal Processing
 CS39 Exam Jan 005 //08 /BMGC University of Manchester Department of Computer Science First Semester Year 3 Examination Paper CS39: Digital Signal Processing Date of Examination: January 005 Answer THREE
CS39 Exam Jan 005 //08 /BMGC University of Manchester Department of Computer Science First Semester Year 3 Examination Paper CS39: Digital Signal Processing Date of Examination: January 005 Answer THREE
Lecture XII: Ideal filters
 BME 171: Signals and Systems Duke University October 29, 2008 This lecture Plan for the lecture: 1 LTI systems with sinusoidal inputs 2 Analog filtering frequency-domain description: passband, stopband
BME 171: Signals and Systems Duke University October 29, 2008 This lecture Plan for the lecture: 1 LTI systems with sinusoidal inputs 2 Analog filtering frequency-domain description: passband, stopband
4. Design of Discrete-Time Filters
 4. Design of Discrete-Time Filters 4.1. Introduction (7.0) 4.2. Frame of Design of IIR Filters (7.1) 4.3. Design of IIR Filters by Impulse Invariance (7.1) 4.4. Design of IIR Filters by Bilinear Transformation
4. Design of Discrete-Time Filters 4.1. Introduction (7.0) 4.2. Frame of Design of IIR Filters (7.1) 4.3. Design of IIR Filters by Impulse Invariance (7.1) 4.4. Design of IIR Filters by Bilinear Transformation
Digital Filters FIR and IIR Systems
 Digital Filters FIR and IIR Systems ELEC 3004: Systems: Signals & Controls Dr. Surya Singh (Some material adapted from courses by Russ Tedrake and Elena Punskaya) Lecture 16 elec3004@itee.uq.edu.au http://robotics.itee.uq.edu.au/~elec3004/
Digital Filters FIR and IIR Systems ELEC 3004: Systems: Signals & Controls Dr. Surya Singh (Some material adapted from courses by Russ Tedrake and Elena Punskaya) Lecture 16 elec3004@itee.uq.edu.au http://robotics.itee.uq.edu.au/~elec3004/
Design of infinite impulse response (IIR) bandpass filter structure using particle swarm optimization
 bandpass filter structure using particle swarm optimization") Standard Scientific Research and Essays Vol1 (1): 1-8, February 13 http://www.standresjournals.org/journals/ssre Research Article Design of infinite impulse response (IIR) bandpass filter structure using
Standard Scientific Research and Essays Vol1 (1): 1-8, February 13 http://www.standresjournals.org/journals/ssre Research Article Design of infinite impulse response (IIR) bandpass filter structure using
Complex Digital Filters Using Isolated Poles and Zeroes
 Complex Digital Filters Using Isolated Poles and Zeroes Donald Daniel January 18, 2008 Revised Jan 15, 2012 Abstract The simplest possible explanation is given of how to construct software digital filters
Complex Digital Filters Using Isolated Poles and Zeroes Donald Daniel January 18, 2008 Revised Jan 15, 2012 Abstract The simplest possible explanation is given of how to construct software digital filters
Design of FIR Filters
 Design of FIR Filters Elena Punskaya www-sigproc.eng.cam.ac.uk/~op205 Some material adapted from courses by Prof. Simon Godsill, Dr. Arnaud Doucet, Dr. Malcolm Macleod and Prof. Peter Rayner 1 FIR as a
Design of FIR Filters Elena Punskaya www-sigproc.eng.cam.ac.uk/~op205 Some material adapted from courses by Prof. Simon Godsill, Dr. Arnaud Doucet, Dr. Malcolm Macleod and Prof. Peter Rayner 1 FIR as a
Team proposals are due tomorrow at 6PM Homework 4 is due next thur. Proposal presentations are next mon in 1311EECS.
 Lecture 8 Today: Announcements: References: FIR filter design IIR filter design Filter roundoff and overflow sensitivity Team proposals are due tomorrow at 6PM Homework 4 is due next thur. Proposal presentations
Lecture 8 Today: Announcements: References: FIR filter design IIR filter design Filter roundoff and overflow sensitivity Team proposals are due tomorrow at 6PM Homework 4 is due next thur. Proposal presentations
ECE 421 Introduction to Signal Processing
 ECE 421 Introduction to Signal Processing Dror Baron Assistant Professor Dept. of Electrical and Computer Engr. North Carolina State University, NC, USA Digital Filter Design [Reading material: Chapter
ECE 421 Introduction to Signal Processing Dror Baron Assistant Professor Dept. of Electrical and Computer Engr. North Carolina State University, NC, USA Digital Filter Design [Reading material: Chapter
Design and comparison of butterworth and chebyshev type-1 low pass filter using Matlab
 Research Cell: An International Journal of Engineering Sciences ISSN: 2229-6913 Issue Sept 2011, Vol. 4 423 Design and comparison of butterworth and chebyshev type-1 low pass filter using Matlab Tushar
Research Cell: An International Journal of Engineering Sciences ISSN: 2229-6913 Issue Sept 2011, Vol. 4 423 Design and comparison of butterworth and chebyshev type-1 low pass filter using Matlab Tushar
APPLIED SIGNAL PROCESSING
 APPLIED SIGNAL PROCESSING 2004 Chapter 1 Digital filtering In this section digital filters are discussed, with a focus on IIR (Infinite Impulse Response) filters and their applications. The most important
APPLIED SIGNAL PROCESSING 2004 Chapter 1 Digital filtering In this section digital filters are discussed, with a focus on IIR (Infinite Impulse Response) filters and their applications. The most important
Copyright S. K. Mitra
 1 In many applications, a discrete-time signal x[n] is split into a number of subband signals by means of an analysis filter bank The subband signals are then processed Finally, the processed subband signals
1 In many applications, a discrete-time signal x[n] is split into a number of subband signals by means of an analysis filter bank The subband signals are then processed Finally, the processed subband signals
Bode plot, named after Hendrik Wade Bode, is usually a combination of a Bode magnitude plot and Bode phase plot:
 Bode plot From Wikipedia, the free encyclopedia A The Bode plot for a first-order (one-pole) lowpass filter Bode plot, named after Hendrik Wade Bode, is usually a combination of a Bode magnitude plot and
Bode plot From Wikipedia, the free encyclopedia A The Bode plot for a first-order (one-pole) lowpass filter Bode plot, named after Hendrik Wade Bode, is usually a combination of a Bode magnitude plot and
Narrow-Band Low-Pass Digital Differentiator Design. Ivan Selesnick Polytechnic University Brooklyn, New York
 Narrow-Band Low-Pass Digital Differentiator Design Ivan Selesnick Polytechnic University Brooklyn, New York selesi@poly.edu http://taco.poly.edu/selesi 1 Ideal Lowpass Digital Differentiator The frequency
Narrow-Band Low-Pass Digital Differentiator Design Ivan Selesnick Polytechnic University Brooklyn, New York selesi@poly.edu http://taco.poly.edu/selesi 1 Ideal Lowpass Digital Differentiator The frequency
 UNIT IV FIR FILTER DESIGN 1. How phase distortion and delay distortion are introduced? The phase distortion is introduced when the phase characteristics of a filter is nonlinear within the desired frequency
UNIT IV FIR FILTER DESIGN 1. How phase distortion and delay distortion are introduced? The phase distortion is introduced when the phase characteristics of a filter is nonlinear within the desired frequency
Application Note 7. Digital Audio FIR Crossover. Highlights Importing Transducer Response Data FIR Window Functions FIR Approximation Methods
 Application Note 7 App Note Application Note 7 Highlights Importing Transducer Response Data FIR Window Functions FIR Approximation Methods n Design Objective 3-Way Active Crossover 200Hz/2kHz Crossover
Application Note 7 App Note Application Note 7 Highlights Importing Transducer Response Data FIR Window Functions FIR Approximation Methods n Design Objective 3-Way Active Crossover 200Hz/2kHz Crossover
Filters occur so frequently in the instrumentation and
 FILTER Design CHAPTER 3 Filters occur so frequently in the instrumentation and communications industries that no book covering the field of RF circuit design could be complete without at least one chapter
FILTER Design CHAPTER 3 Filters occur so frequently in the instrumentation and communications industries that no book covering the field of RF circuit design could be complete without at least one chapter
EE247 Lecture 2. Butterworth Chebyshev I Chebyshev II Elliptic Bessel Group delay comparison example. EECS 247 Lecture 2: Filters
 EE247 Lecture 2 Material covered today: Nomenclature Filter specifications Quality factor Frequency characteristics Group delay Filter types Butterworth Chebyshev I Chebyshev II Elliptic Bessel Group delay
EE247 Lecture 2 Material covered today: Nomenclature Filter specifications Quality factor Frequency characteristics Group delay Filter types Butterworth Chebyshev I Chebyshev II Elliptic Bessel Group delay
GEORGIA INSTITUTE OF TECHNOLOGY. SCHOOL of ELECTRICAL and COMPUTER ENGINEERING. ECE 2026 Summer 2018 Lab #8: Filter Design of FIR Filters
 GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL and COMPUTER ENGINEERING ECE 2026 Summer 2018 Lab #8: Filter Design of FIR Filters Date: 19. Jul 2018 Pre-Lab: You should read the Pre-Lab section of
GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL and COMPUTER ENGINEERING ECE 2026 Summer 2018 Lab #8: Filter Design of FIR Filters Date: 19. Jul 2018 Pre-Lab: You should read the Pre-Lab section of
Design IIR Band-Reject Filters
 db Design IIR Band-Reject Filters In this post, I show how to design IIR Butterworth band-reject filters, and provide two Matlab functions for band-reject filter synthesis. Earlier posts covered IIR Butterworth
db Design IIR Band-Reject Filters In this post, I show how to design IIR Butterworth band-reject filters, and provide two Matlab functions for band-reject filter synthesis. Earlier posts covered IIR Butterworth
EKT 356 MICROWAVE COMMUNICATIONS CHAPTER 4: MICROWAVE FILTERS
 EKT 356 MICROWAVE COMMUNICATIONS CHAPTER 4: MICROWAVE FILTERS 1 INTRODUCTION What is a Microwave filter? linear 2-port network controls the frequency response at a certain point in a microwave system provides
EKT 356 MICROWAVE COMMUNICATIONS CHAPTER 4: MICROWAVE FILTERS 1 INTRODUCTION What is a Microwave filter? linear 2-port network controls the frequency response at a certain point in a microwave system provides
Adaptive Filters Application of Linear Prediction
 Adaptive Filters Application of Linear Prediction Gerhard Schmidt Christian-Albrechts-Universität zu Kiel Faculty of Engineering Electrical Engineering and Information Technology Digital Signal Processing
Adaptive Filters Application of Linear Prediction Gerhard Schmidt Christian-Albrechts-Universität zu Kiel Faculty of Engineering Electrical Engineering and Information Technology Digital Signal Processing
EELE503. Modern filter design. Filter Design - Introduction
 EELE503 Modern filter design Filter Design - Introduction A filter will modify the magnitude or phase of a signal to produce a desired frequency response or time response. One way to classify ideal filters
EELE503 Modern filter design Filter Design - Introduction A filter will modify the magnitude or phase of a signal to produce a desired frequency response or time response. One way to classify ideal filters
y(n)= Aa n u(n)+bu(n) b m sin(2πmt)= b 1 sin(2πt)+b 2 sin(4πt)+b 3 sin(6πt)+ m=1 x(t)= x = 2 ( b b b b
= Aa n u(n)+bu(n) b m sin(2πmt)= b 1 sin(2πt)+b 2 sin(4πt)+b 3 sin(6πt)+ m=1 x(t)= x = 2 ( b b b b") Exam 1 February 3, 006 Each subquestion is worth 10 points. 1. Consider a periodic sawtooth waveform x(t) with period T 0 = 1 sec shown below: (c) x(n)= u(n). In this case, show that the output has the
Exam 1 February 3, 006 Each subquestion is worth 10 points. 1. Consider a periodic sawtooth waveform x(t) with period T 0 = 1 sec shown below: (c) x(n)= u(n). In this case, show that the output has the
Rahman Jamal, et. al.. "Filters." Copyright 2000 CRC Press LLC. <
 Rahman Jamal, et. al.. "Filters." Copyright 000 CRC Press LLC. . Filters Rahman Jamal National Instruments Germany Robert Steer Frequency Devices 8. Introduction 8. Filter Classification
Rahman Jamal, et. al.. "Filters." Copyright 000 CRC Press LLC. . Filters Rahman Jamal National Instruments Germany Robert Steer Frequency Devices 8. Introduction 8. Filter Classification
PROBLEM SET 6. Note: This version is preliminary in that it does not yet have instructions for uploading the MATLAB problems.
 PROBLEM SET 6 Issued: 2/32/19 Due: 3/1/19 Reading: During the past week we discussed change of discrete-time sampling rate, introducing the techniques of decimation and interpolation, which is covered
PROBLEM SET 6 Issued: 2/32/19 Due: 3/1/19 Reading: During the past week we discussed change of discrete-time sampling rate, introducing the techniques of decimation and interpolation, which is covered
Microwave Circuits Design. Microwave Filters. high pass
 Used to control the frequency response at a certain point in a microwave system by providing transmission at frequencies within the passband of the filter and attenuation in the stopband of the filter.
Used to control the frequency response at a certain point in a microwave system by providing transmission at frequencies within the passband of the filter and attenuation in the stopband of the filter.
Chapter 15: Active Filters
 Chapter 15: Active Filters 15.1: Basic filter Responses A filter is a circuit that passes certain frequencies and rejects or attenuates all others. The passband is the range of frequencies allowed to pass
Chapter 15: Active Filters 15.1: Basic filter Responses A filter is a circuit that passes certain frequencies and rejects or attenuates all others. The passband is the range of frequencies allowed to pass
CHAPTER 6 INTRODUCTION TO SYSTEM IDENTIFICATION
 CHAPTER 6 INTRODUCTION TO SYSTEM IDENTIFICATION Broadly speaking, system identification is the art and science of using measurements obtained from a system to characterize the system. The characterization
CHAPTER 6 INTRODUCTION TO SYSTEM IDENTIFICATION Broadly speaking, system identification is the art and science of using measurements obtained from a system to characterize the system. The characterization
Multirate Digital Signal Processing
 Multirate Digital Signal Processing Basic Sampling Rate Alteration Devices Up-sampler - Used to increase the sampling rate by an integer factor Down-sampler - Used to increase the sampling rate by an integer
Multirate Digital Signal Processing Basic Sampling Rate Alteration Devices Up-sampler - Used to increase the sampling rate by an integer factor Down-sampler - Used to increase the sampling rate by an integer
Final Exam. EE313 Signals and Systems. Fall 1999, Prof. Brian L. Evans, Unique No
 Final Exam EE313 Signals and Systems Fall 1999, Prof. Brian L. Evans, Unique No. 14510 December 11, 1999 The exam is scheduled to last 50 minutes. Open books and open notes. You may refer to your homework
Final Exam EE313 Signals and Systems Fall 1999, Prof. Brian L. Evans, Unique No. 14510 December 11, 1999 The exam is scheduled to last 50 minutes. Open books and open notes. You may refer to your homework
UNIT-II MYcsvtu Notes agk
 UNIT-II agk UNIT II Infinite Impulse Response Filter design (IIR): Analog & Digital Frequency transformation. Designing by impulse invariance & Bilinear method. Butterworth and Chebyshev Design Method.
UNIT-II agk UNIT II Infinite Impulse Response Filter design (IIR): Analog & Digital Frequency transformation. Designing by impulse invariance & Bilinear method. Butterworth and Chebyshev Design Method.
EEL 3923C. JD/ Module 3 Elementary Analog Filter Design. Prof. T. Nishida Fall 2010
 EEL 3923C JD/ Module 3 Elementary Analog Filter Design Prof. T. Nishida Fall 2010 Purpose Frequency selection Low pass, high pass, band pass, band stop, notch, etc. Applications II. Filter Fundamentals
EEL 3923C JD/ Module 3 Elementary Analog Filter Design Prof. T. Nishida Fall 2010 Purpose Frequency selection Low pass, high pass, band pass, band stop, notch, etc. Applications II. Filter Fundamentals
Lecture 17 z-transforms 2
 Lecture 17 z-transforms 2 Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/3 1 Factoring z-polynomials We can also factor z-transform polynomials to break down a large system into
Lecture 17 z-transforms 2 Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/3 1 Factoring z-polynomials We can also factor z-transform polynomials to break down a large system into
A Bessel Filter Crossover, and Its Relation to Other Types
 Preprint No. 4776 A Bessel Filter Crossover, and Its Relation to Other Types Ray Miller Rane Corporation, Mukilteo, WA USA One of the ways that a crossover may be constructed from a Bessel low-pass filter
Preprint No. 4776 A Bessel Filter Crossover, and Its Relation to Other Types Ray Miller Rane Corporation, Mukilteo, WA USA One of the ways that a crossover may be constructed from a Bessel low-pass filter
Brief Introduction to Signals & Systems. Phani Chavali
 Brief Introduction to Signals & Systems Phani Chavali Outline Signals & Systems Continuous and discrete time signals Properties of Systems Input- Output relation : Convolution Frequency domain representation
Brief Introduction to Signals & Systems Phani Chavali Outline Signals & Systems Continuous and discrete time signals Properties of Systems Input- Output relation : Convolution Frequency domain representation
1. Clearly circle one answer for each part.
 TB 1-9 / Exam Style Questions 1 EXAM STYLE QUESTIONS Covering Chapters 1-9 of Telecommunication Breakdown 1. Clearly circle one answer for each part. (a) TRUE or FALSE: Absolute bandwidth is never less
TB 1-9 / Exam Style Questions 1 EXAM STYLE QUESTIONS Covering Chapters 1-9 of Telecommunication Breakdown 1. Clearly circle one answer for each part. (a) TRUE or FALSE: Absolute bandwidth is never less
Digital Signal Processing
 Digital Signal Processing System Analysis and Design Paulo S. R. Diniz Eduardo A. B. da Silva and Sergio L. Netto Federal University of Rio de Janeiro CAMBRIDGE UNIVERSITY PRESS Preface page xv Introduction
Digital Signal Processing System Analysis and Design Paulo S. R. Diniz Eduardo A. B. da Silva and Sergio L. Netto Federal University of Rio de Janeiro CAMBRIDGE UNIVERSITY PRESS Preface page xv Introduction