Bio-inspired Multiagent Systems
|
|
|
- Charla Long
- 5 years ago
- Views:
Transcription


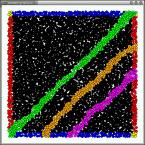
1 Outline Bio-inspired Multiagent Systems Amorphous Computing pattern formation in silico Collective Construction by Robot Swarms shape and pattern in robotics Radhika Nagpal Computer Science, Harvard University Americas School on Agents and Multiagent Systems, 2006 Many Other Areas: Swarm intelligence, Immune-inspired Systems, Evolutionary approaches, etc Amorphous Computing An Amorphous Computer How do we obtain a robust behavior from the cooperation of vast numbers of unreliable parts? r How do we engineer pre-specified global behavior from local interactions? local neighborhood identically programmed agents 1

2 A Simple Pattern: Polka Dots A Simple Pattern A Simple Pattern Polka Dot Program Gradient 2
3 Polka Dot Program How much more complex are these? Trigger A secrete I (and turn blue) Receive I > threshold Suppose we want to create an arbitrary pattern? An Inverter Program c1 c4 e12 e34 c2 c3 v1 v1 v2 v3 IN MID OUT 3
 crease-p2p p2 intersect p c1 e12 c2 Point of agents (A3) crease-l2l L1")

) (if i2 (begin (wait-for-gradient g1) (create-gradient")
)) (wait-for-gradients gend) Chemotropism p2 p2 ) (if (<= (abs (- g1 g2))")
4 A Set of Construction Rules Initial Conditions: Determinants (A1) crease-lbp p2 (A2) crease-p2p p2 intersect p c1 e12 c2 Point of agents (A3) crease-l2l L1 L2 (A4) crease-l2self L1 region L1 Agent Local State c2 = #t c3 = #f... Line of agents c4 e34 c3 Implementing the Rules Individual Element Balancing Gradients p2 p2 L1 L2 (define (axiom2-rule i1 i2 g1 g2 gend) (if i1 (create-gradient g1)) (if i2 (begin (wait-for-gradient g1) (create-gradient g2))) (if i1 (begin (wait-for-gradient g1) (wait local-delay) (create-gradient gend))) (wait-for-gradients gend) Chemotropism p2 p2 ) (if (<= (abs (- g1 g2)) threshold) #t #f) 4
)")
) (define OUT (create-region v1)) (define MID (create-region v1")

 \"poly\")) (within-region OUT (color h1 \"poly\")) (within-region CNTR")
) (define contacts (intersect v1 (or e12 h1 e34)) (color")

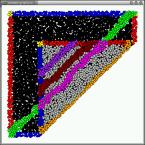
5 An Inverter Program A "Generative" Global Program OSL Program for Drawing a CMOS Inverter c1 c4 e12 e34 c2 c3 v1 v1 v2 v3 IN MID OUT (define v1 (crease-l2l )) (define v2 (crease-l2l v1 )) (define v3 (crease-l2l v1 )) (define IN (create-region v3)) (define OUT (create-region v1)) (define MID (create-region v1 (or v2 v3)) ;; Similarly create horizontal regions... c1 c4 e12 e34 v1 c2 c3 v1 IN MID OUT v2 v3 ;; Lay down Material (differentiate) (within-region IN (color h1 "poly")) (within-region MID (color (or h2 h3) "poly")) (within-region OUT (color h1 "poly")) (within-region CNTR (color v3 "poly")) (within-region UP (color v1 "n-diff")) (within-region DOWN (color v1 "p-diff")) (define contacts (intersect v1 (or e12 h1 e34)) (color contacts "contacts") Pattern-Formation on an Amorphous Computer Inverter Chain Pattern ;; Segment into ;; 8 COMPARTMENTS ;; Execute ;; inverter pattern program ;; within a region (within-region r1 (create-inverter left-border1 right-border1)) 5



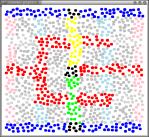









6 Many Shapes and Patterns Scale-Independence pattern scales with number of cells Local State: Boolean per distinct point, line, region Morphogen Gradients: Many, but short-lived Could use as few as 6 Related Structures Program the Cell, to "grow" the appropriate shape Ridley (1997) Evolution (Cell can grow, not grow, or die) 6
")

 Attila Kondacs, Catherine")





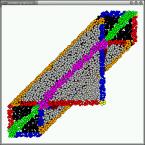
7 Constructing a 2D shape Self-Assembly using directed growth N Two rules: (1) grow a circle of a given radius (2) elect reference points Shape == Set of rules (proportional to the number of circles) Attila Kondacs, Catherine Chang Self-Repair and Regeneration Regenerating structures Absence of neighbor causes circle to recreate its neighbor, which in turn recreates its neighbor - thus regenerating the broken structure Languages for Pattern Formation Languages for constructing pattern COMPILER Self-repairing patterns If a line is broken, one part dies off and the other regrows Behavior of an individual element 7





8 Lessons From Amorphous Computing Engineering Shape and Pattern Programmable Morphology Global-to-local compilation Small set of primitives Scale-independence and regeneration (images Ron Weiss, Princeton) Self-Reconfiguration In Modular Robots Formation Control for Robot Swarms How do these apply to computer systems? Collective Construction by robot swarms Collective Construction Collective Construction by Robot Swarms Joint work with Justin Werfel, Daniela Rus (MIT), Yaneer Bar-Yam (NECSI) 8
 Simple robot capabilities Does augmenting the environment help?")
9 Properties of a Swarm Approach Our Goal Advantages Exploits Parallelism Robust Varying numbers of agents, agent loss or addition, asynchronous Simple Agent Capabilities Disadvantages Hard to create local rules for a given goal? Collective construction Assemble a user-specified shape Robust (similar to swarms) Simple robot capabilities Does augmenting the environment help? What if blocks can store state? or even communicate? (e.g. RFIDs or motes) Abstract World Constraints on Block Placement Robots Marker for structure start Caches of blocks 9

10 Agent Algorithm Strategy 1: Inert Blocks Given a Shape Map Localize relative to the structure Avoid bad intermediate states Correctness: Multiple robots, no deadlocks,(0,2) Robot Program: - Find Landmark - Keep track of position by counting blocks - Using avoid-gaps rule and shape map, find an attachment site Avoiding Gaps Rule 2. Writeable Blocks Constraint Avoid placing two blocks separated in the same row Avoid Gaps Rule Right corner => ok Left corner, End-of-row => ok (correct for multiple robots) followed by (0,0) (1,0) (0,1) (1,1) (0,2) (0,3) (0,4) Robot Program: - Read ANY block to localize - Use avoid-gaps rule to prevent bad intermediate states 10
 (1,0")
 (1,1")
 (0,3")
11 3: Communicating Blocks Comparison (0,0) (1,0) (0,1) (1,1) (0,2) (0,3) (?,?) (0,4) Block Program: - Tell robots the location - Tell robots if it is possible to attach a block to that face (better ways to avoid gaps) Common Properties Robots act independently, but coordinate through interaction with the structure. Performance Robustness Cost Performance Robustness Cost Inert Write Com Implementation Robot Capabilities: Robust perimeter following, recognize block edges and corners, follow beacon, manipulate blocks Block Capabilities: Self-aligning 11
 possible algorithm given an agent s capabilities?")
12 Conclusion We can address the two questions posed by Amorphous Computing. Still Many Questions: Are some shapes harder than others? How do we think about functional shapes? What about other types of global goals? Can we know what is the best (or simplest ) possible algorithm given an agent s capabilities? Acknowledgements Amorphous Computing Group, MIT CSAIL Gerry Sussman, Hal Abelson, Tom Knight, Daniel Coore, Ron Weiss, Jake Beal, Attila Kondacs, Catherine Chang, Lauren Clement Reconfigurable Robots/Robot Swarms Kasper Stoy (Univ of S. Denmark), Winston and Jimming Cheng (Harvard) Collective Construction Justin Werfel (MIT/Harvard), Matt Valente (MIT), Crystal Schuil (MIT), Daniela Rus (MIT), Yaneer Bar-Yam (NECSI) 12
Programmable self-assembly in a thousandrobot
 Programmable self-assembly in a thousandrobot swarm Michael Rubenstein, Alejandro Cornejo, Radhika Nagpal. By- Swapna Joshi 1 st year Ph.D Computing Culture and Society. Authors Michael Rubenstein Assistant
Programmable self-assembly in a thousandrobot swarm Michael Rubenstein, Alejandro Cornejo, Radhika Nagpal. By- Swapna Joshi 1 st year Ph.D Computing Culture and Society. Authors Michael Rubenstein Assistant
Collective Construction Using Lego Robots
 Collective Construction Using Lego Robots Crystal Schuil 1, Matthew Valente 1, Justin Werfel 2, Radhika Nagpal 1 1 Harvard University, 33 Oxford Street, Cambridge, MA 02138 2 Massachusetts Institute of
Collective Construction Using Lego Robots Crystal Schuil 1, Matthew Valente 1, Justin Werfel 2, Radhika Nagpal 1 1 Harvard University, 33 Oxford Street, Cambridge, MA 02138 2 Massachusetts Institute of
Designing Robot Collectives
 Designing Robot Collectives by Kirstin Petersen July 2017 Motivation January 2004 Distance to Mars: 34-250M miles Travel time: 39-289 days Cost: $1B April 2009 Designing Robot Collectives Instead of sending
Designing Robot Collectives by Kirstin Petersen July 2017 Motivation January 2004 Distance to Mars: 34-250M miles Travel time: 39-289 days Cost: $1B April 2009 Designing Robot Collectives Instead of sending
Spatial Computing, Synthetic Biology, and Emerging IP Challenges. Jacob Beal November, 2010
 Spatial Computing, Synthetic Biology, and Emerging IP Challenges Jacob Beal November, 2010 Spatial Computers Robot Swarms Reconfigurable Computing Biological Computing Cells during Morphogenesis Sensor
Spatial Computing, Synthetic Biology, and Emerging IP Challenges Jacob Beal November, 2010 Spatial Computers Robot Swarms Reconfigurable Computing Biological Computing Cells during Morphogenesis Sensor
Swarm Robotics. Lecturer: Roderich Gross
 Swarm Robotics Lecturer: Roderich Gross 1 Outline Why swarm robotics? Example domains: Coordinated exploration Transportation and clustering Reconfigurable robots Summary Stigmergy revisited 2 Sources
Swarm Robotics Lecturer: Roderich Gross 1 Outline Why swarm robotics? Example domains: Coordinated exploration Transportation and clustering Reconfigurable robots Summary Stigmergy revisited 2 Sources
Implicit Fitness Functions for Evolving a Drawing Robot
 Implicit Fitness Functions for Evolving a Drawing Robot Jon Bird, Phil Husbands, Martin Perris, Bill Bigge and Paul Brown Centre for Computational Neuroscience and Robotics University of Sussex, Brighton,
Implicit Fitness Functions for Evolving a Drawing Robot Jon Bird, Phil Husbands, Martin Perris, Bill Bigge and Paul Brown Centre for Computational Neuroscience and Robotics University of Sussex, Brighton,
Towards Artificial ATRON Animals: Scalable Anatomy for Self-Reconfigurable Robots
 Towards Artificial ATRON Animals: Scalable Anatomy for Self-Reconfigurable Robots David J. Christensen, David Brandt & Kasper Støy Robotics: Science & Systems Workshop on Self-Reconfigurable Modular Robots
Towards Artificial ATRON Animals: Scalable Anatomy for Self-Reconfigurable Robots David J. Christensen, David Brandt & Kasper Støy Robotics: Science & Systems Workshop on Self-Reconfigurable Modular Robots
Avoiding deadlock in multi-agent systems
 Avoiding deadlock in multi-agent systems Dominique Duhaut, Elian Carrillo, Sébastien Saint-Aimé To cite this version: Dominique Duhaut, Elian Carrillo, Sébastien Saint-Aimé. Avoiding deadlock in multi-agent
Avoiding deadlock in multi-agent systems Dominique Duhaut, Elian Carrillo, Sébastien Saint-Aimé To cite this version: Dominique Duhaut, Elian Carrillo, Sébastien Saint-Aimé. Avoiding deadlock in multi-agent
Disseny físic. Disseny en Standard Cells. Enric Pastor Rosa M. Badia Ramon Canal DM Tardor DM, Tardor
 Disseny físic Disseny en Standard Cells Enric Pastor Rosa M. Badia Ramon Canal DM Tardor 2005 DM, Tardor 2005 1 Design domains (Gajski) Structural Processor, memory ALU, registers Cell Device, gate Transistor
Disseny físic Disseny en Standard Cells Enric Pastor Rosa M. Badia Ramon Canal DM Tardor 2005 DM, Tardor 2005 1 Design domains (Gajski) Structural Processor, memory ALU, registers Cell Device, gate Transistor
Synthetic Brains: Update
 Synthetic Brains: Update Bryan Adams Computer Science and Artificial Intelligence Laboratory (CSAIL) Massachusetts Institute of Technology Project Review January 04 through April 04 Project Status Current
Synthetic Brains: Update Bryan Adams Computer Science and Artificial Intelligence Laboratory (CSAIL) Massachusetts Institute of Technology Project Review January 04 through April 04 Project Status Current
The Cricket Indoor Location System
 The Cricket Indoor Location System Hari Balakrishnan Cricket Project MIT Computer Science and Artificial Intelligence Lab http://nms.csail.mit.edu/~hari http://cricket.csail.mit.edu Joint work with Bodhi
The Cricket Indoor Location System Hari Balakrishnan Cricket Project MIT Computer Science and Artificial Intelligence Lab http://nms.csail.mit.edu/~hari http://cricket.csail.mit.edu Joint work with Bodhi
Distributed Multi-Robot Algorithms for the TERMES 3D Collective Construction System
 Distributed Multi-Robot Algorithms for the TERMES 3D Collective Construction System The Harvard community has made this article openly available. Please share how this access benefits you. Your story matters.
Distributed Multi-Robot Algorithms for the TERMES 3D Collective Construction System The Harvard community has made this article openly available. Please share how this access benefits you. Your story matters.
Subsumption Architecture in Swarm Robotics. Cuong Nguyen Viet 16/11/2015
 Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
CS 599: Distributed Intelligence in Robotics
 CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
Kilobot: A Robotic Module for Demonstrating Behaviors in a Large Scale (\(2^{10}\) Units) Collective
 Units) Collective") Kilobot: A Robotic Module for Demonstrating Behaviors in a Large Scale (\(2^{10}\) Units) Collective The Harvard community has made this article openly available. Please share how this access benefits
Kilobot: A Robotic Module for Demonstrating Behaviors in a Large Scale (\(2^{10}\) Units) Collective The Harvard community has made this article openly available. Please share how this access benefits
1,024 Kilobot Robots Studying Collective Behaviors & Swarm Intelligence with Little Bitty Robots
 NJIT 1,024 Kilobot Robots Studying Collective Behaviors & Swarm Intelligence with Little Bitty Robots From ant colonies to how cells cooperate to form complex patterns, New Jersey Institute of Technology(NJIT)
NJIT 1,024 Kilobot Robots Studying Collective Behaviors & Swarm Intelligence with Little Bitty Robots From ant colonies to how cells cooperate to form complex patterns, New Jersey Institute of Technology(NJIT)
Dimensioning the Rectangular Problem
 C h a p t e r 3 Dimensioning the Rectangular Problem In this chapter, you will learn the following to World Class standards: 1. Creating new layers in an AutoCAD drawing 2. Placing Centerlines on the drawing
C h a p t e r 3 Dimensioning the Rectangular Problem In this chapter, you will learn the following to World Class standards: 1. Creating new layers in an AutoCAD drawing 2. Placing Centerlines on the drawing
Evolution of Sensor Suites for Complex Environments
 Evolution of Sensor Suites for Complex Environments Annie S. Wu, Ayse S. Yilmaz, and John C. Sciortino, Jr. Abstract We present a genetic algorithm (GA) based decision tool for the design and configuration
Evolution of Sensor Suites for Complex Environments Annie S. Wu, Ayse S. Yilmaz, and John C. Sciortino, Jr. Abstract We present a genetic algorithm (GA) based decision tool for the design and configuration
Building Blocks for Multi-Robot Construction
 Building Blocks for Multi-Robot Construction Justin Werfel Massachusetts Institute of Technology, Cambridge, MA, USA jkwerfel@mit.edu Summary. One notable capability of social insect colonies that has
Building Blocks for Multi-Robot Construction Justin Werfel Massachusetts Institute of Technology, Cambridge, MA, USA jkwerfel@mit.edu Summary. One notable capability of social insect colonies that has
SWARM INTELLIGENCE. Mario Pavone Department of Mathematics & Computer Science University of Catania
 Worker Ant #1: I'm lost! Where's the line? What do I do? Worker Ant #2: Help! Worker Ant #3: We'll be stuck here forever! Mr. Soil: Do not panic, do not panic. We are trained professionals. Now, stay calm.
Worker Ant #1: I'm lost! Where's the line? What do I do? Worker Ant #2: Help! Worker Ant #3: We'll be stuck here forever! Mr. Soil: Do not panic, do not panic. We are trained professionals. Now, stay calm.
Multi-Robot Coordination. Chapter 11
 Multi-Robot Coordination Chapter 11 Objectives To understand some of the problems being studied with multiple robots To understand the challenges involved with coordinating robots To investigate a simple
Multi-Robot Coordination Chapter 11 Objectives To understand some of the problems being studied with multiple robots To understand the challenges involved with coordinating robots To investigate a simple
KOVAN Dept. of Computer Eng. Middle East Technical University Ankara, Turkey
 Swarm Robotics: From sources of inspiration to domains of application Erol Sahin KOVAN Dept. of Computer Eng. Middle East Technical University Ankara, Turkey http://www.kovan.ceng.metu.edu.tr What is Swarm
Swarm Robotics: From sources of inspiration to domains of application Erol Sahin KOVAN Dept. of Computer Eng. Middle East Technical University Ankara, Turkey http://www.kovan.ceng.metu.edu.tr What is Swarm
Attic Windows Skill Level: Beginner
 Attic Windows Skill Level: Beginner Sewn by Jo Ann Lepore Quilted by Mary Diamond P&B solid fabrics shown The traditional Attic Windows pattern is easily accomplished. Beginning quilters of all ages will
Attic Windows Skill Level: Beginner Sewn by Jo Ann Lepore Quilted by Mary Diamond P&B solid fabrics shown The traditional Attic Windows pattern is easily accomplished. Beginning quilters of all ages will
Evolving High-Dimensional, Adaptive Camera-Based Speed Sensors
 In: M.H. Hamza (ed.), Proceedings of the 21st IASTED Conference on Applied Informatics, pp. 1278-128. Held February, 1-1, 2, Insbruck, Austria Evolving High-Dimensional, Adaptive Camera-Based Speed Sensors
In: M.H. Hamza (ed.), Proceedings of the 21st IASTED Conference on Applied Informatics, pp. 1278-128. Held February, 1-1, 2, Insbruck, Austria Evolving High-Dimensional, Adaptive Camera-Based Speed Sensors
Team-Triggered Coordination of Robotic Networks for Optimal Deployment
 Team-Triggered Coordination of Robotic Networks for Optimal Deployment Cameron Nowzari 1, Jorge Cortés 2, and George J. Pappas 1 Electrical and Systems Engineering 1 University of Pennsylvania Mechanical
Team-Triggered Coordination of Robotic Networks for Optimal Deployment Cameron Nowzari 1, Jorge Cortés 2, and George J. Pappas 1 Electrical and Systems Engineering 1 University of Pennsylvania Mechanical
Digital Photography 1
 Digital Photography 1 Photoshop Lesson 3 Resizing and transforming images Name Date Create a new image 1. Choose File > New. 2. In the New dialog box, type a name for the image. 3. Choose document size
Digital Photography 1 Photoshop Lesson 3 Resizing and transforming images Name Date Create a new image 1. Choose File > New. 2. In the New dialog box, type a name for the image. 3. Choose document size
In vivo, in silico, in machina: ants and robots balance memory and communication to collectively exploit information
 In vivo, in silico, in machina: ants and robots balance memory and communication to collectively exploit information Melanie E. Moses, Kenneth Letendre, Joshua P. Hecker, Tatiana P. Flanagan Department
In vivo, in silico, in machina: ants and robots balance memory and communication to collectively exploit information Melanie E. Moses, Kenneth Letendre, Joshua P. Hecker, Tatiana P. Flanagan Department
Computer Graphics (CS/ECE 545) Lecture 7: Morphology (Part 2) & Regions in Binary Images (Part 1)
 Lecture 7: Morphology (Part 2) & Regions in Binary Images (Part 1)") Computer Graphics (CS/ECE 545) Lecture 7: Morphology (Part 2) & Regions in Binary Images (Part 1) Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) Recall: Dilation Example
Computer Graphics (CS/ECE 545) Lecture 7: Morphology (Part 2) & Regions in Binary Images (Part 1) Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) Recall: Dilation Example
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization
 Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Multi robot Team Formation for Distributed Area Coverage. Raj Dasgupta Computer Science Department University of Nebraska, Omaha
 Multi robot Team Formation for Distributed Area Coverage Raj Dasgupta Computer Science Department University of Nebraska, Omaha C MANTIC Lab Collaborative Multi AgeNt/Multi robot Technologies for Intelligent
Multi robot Team Formation for Distributed Area Coverage Raj Dasgupta Computer Science Department University of Nebraska, Omaha C MANTIC Lab Collaborative Multi AgeNt/Multi robot Technologies for Intelligent
Chapter 17. Shape-Based Operations
 Chapter 17 Shape-Based Operations An shape-based operation identifies or acts on groups of pixels that belong to the same object or image component. We have already seen how components may be identified
Chapter 17 Shape-Based Operations An shape-based operation identifies or acts on groups of pixels that belong to the same object or image component. We have already seen how components may be identified
1 Best Practices Course Week 12 Part 2 copyright 2012 by Eric Bobrow. BEST PRACTICES COURSE WEEK 12 PART 2 Program Planning Areas and Lists of Spaces
 BEST PRACTICES COURSE WEEK 12 PART 2 Program Planning Areas and Lists of Spaces Hello, this is Eric Bobrow. And in this lesson, we'll take a look at how you can create a site survey drawing in ArchiCAD
BEST PRACTICES COURSE WEEK 12 PART 2 Program Planning Areas and Lists of Spaces Hello, this is Eric Bobrow. And in this lesson, we'll take a look at how you can create a site survey drawing in ArchiCAD
A Hybrid Planning Approach for Robots in Search and Rescue
 A Hybrid Planning Approach for Robots in Search and Rescue Sanem Sariel Istanbul Technical University, Computer Engineering Department Maslak TR-34469 Istanbul, Turkey. sariel@cs.itu.edu.tr ABSTRACT In
A Hybrid Planning Approach for Robots in Search and Rescue Sanem Sariel Istanbul Technical University, Computer Engineering Department Maslak TR-34469 Istanbul, Turkey. sariel@cs.itu.edu.tr ABSTRACT In
Effect of Sensor and Actuator Quality on Robot Swarm Algorithm Performance
 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-30, 2011. San Francisco, CA, USA Effect of Sensor and Actuator Quality on Robot Swarm Algorithm Performance Nicholas
2011 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-30, 2011. San Francisco, CA, USA Effect of Sensor and Actuator Quality on Robot Swarm Algorithm Performance Nicholas
Lecture 11: Clocking
 High Speed CMOS VLSI Design Lecture 11: Clocking (c) 1997 David Harris 1.0 Introduction We have seen that generating and distributing clocks with little skew is essential to high speed circuit design.
High Speed CMOS VLSI Design Lecture 11: Clocking (c) 1997 David Harris 1.0 Introduction We have seen that generating and distributing clocks with little skew is essential to high speed circuit design.
Digital Image Processing
 Digital Image Processing Part 2: Image Enhancement Digital Image Processing Course Introduction in the Spatial Domain Lecture AASS Learning Systems Lab, Teknik Room T26 achim.lilienthal@tech.oru.se Course
Digital Image Processing Part 2: Image Enhancement Digital Image Processing Course Introduction in the Spatial Domain Lecture AASS Learning Systems Lab, Teknik Room T26 achim.lilienthal@tech.oru.se Course
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
MicroStation XM Training Manual 2D Level 2
 You are viewing sample pages from our textbook: MicroStation XM Training Manual 2D Level 2 The full content of Module 9 is shown below, which discusses the generation of Complex Elements. The instruction
You are viewing sample pages from our textbook: MicroStation XM Training Manual 2D Level 2 The full content of Module 9 is shown below, which discusses the generation of Complex Elements. The instruction
Experiments in Decentralized Robot Construction with Tool Delivery and Assembly Robots
 Experiments in Decentralized Robot Construction with Tool Delivery and Assembly Robots The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters.
Experiments in Decentralized Robot Construction with Tool Delivery and Assembly Robots The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters.
FAU Math Circle 10/3/2015
 FAU Math Circle 10/3/2015 Math Warm Up The National Mathematics Salute!!! (Ana) What is the correct way of saying it: 5 and 6 are 12 or 5 and 6 is 12? MCFAU/2015/10/3 2 For the next three questions we
FAU Math Circle 10/3/2015 Math Warm Up The National Mathematics Salute!!! (Ana) What is the correct way of saying it: 5 and 6 are 12 or 5 and 6 is 12? MCFAU/2015/10/3 2 For the next three questions we
Genetic Programming of Autonomous Agents. Senior Project Proposal. Scott O'Dell. Advisors: Dr. Joel Schipper and Dr. Arnold Patton
 Genetic Programming of Autonomous Agents Senior Project Proposal Scott O'Dell Advisors: Dr. Joel Schipper and Dr. Arnold Patton December 9, 2010 GPAA 1 Introduction to Genetic Programming Genetic programming
Genetic Programming of Autonomous Agents Senior Project Proposal Scott O'Dell Advisors: Dr. Joel Schipper and Dr. Arnold Patton December 9, 2010 GPAA 1 Introduction to Genetic Programming Genetic programming
Uses Contempo s Anything Goes collection by Ann Lauer Finished Size: 57 x 57
 2016 Benartex, LLC It s easy to create your own art quilt with Ann Lauer s exciting new Anything Goes collection. Just follow the simple instructions and you ll have a fresh new modern wallhanging, perfect
2016 Benartex, LLC It s easy to create your own art quilt with Ann Lauer s exciting new Anything Goes collection. Just follow the simple instructions and you ll have a fresh new modern wallhanging, perfect
Using Binary Layers with NIS-Elements
 Using Binary Layers with NIS-Elements Overview This technical note describes the usage of Binary Layers with NIS-Elements. Binary layers form an extension of simple intensity thresholding technique, allowing
Using Binary Layers with NIS-Elements Overview This technical note describes the usage of Binary Layers with NIS-Elements. Binary layers form an extension of simple intensity thresholding technique, allowing
{ FEATURING PARADISE COLLECTION}
 { FEATURING PARADISE COLLECTION} F R E E P R O J E C T S H E E T DESIGNED WITH LOVE BY DESIGNED WITH LOVE BY FABRICS DESIGNED BY PATRICIA BRAVO for ART GALLERY FABRICS Finished Size: 56.5" by 64.5" Block
{ FEATURING PARADISE COLLECTION} F R E E P R O J E C T S H E E T DESIGNED WITH LOVE BY DESIGNED WITH LOVE BY FABRICS DESIGNED BY PATRICIA BRAVO for ART GALLERY FABRICS Finished Size: 56.5" by 64.5" Block
PHYSICAL STRUCTURE OF CMOS INTEGRATED CIRCUITS. Dr. Mohammed M. Farag
 PHYSICAL STRUCTURE OF CMOS INTEGRATED CIRCUITS Dr. Mohammed M. Farag Outline Integrated Circuit Layers MOSFETs CMOS Layers Designing FET Arrays EE 432 VLSI Modeling and Design 2 Integrated Circuit Layers
PHYSICAL STRUCTURE OF CMOS INTEGRATED CIRCUITS Dr. Mohammed M. Farag Outline Integrated Circuit Layers MOSFETs CMOS Layers Designing FET Arrays EE 432 VLSI Modeling and Design 2 Integrated Circuit Layers
Structure and Synthesis of Robot Motion
 Structure and Synthesis of Robot Motion Motion Synthesis in Groups and Formations I Subramanian Ramamoorthy School of Informatics 5 March 2012 Consider Motion Problems with Many Agents How should we model
Structure and Synthesis of Robot Motion Motion Synthesis in Groups and Formations I Subramanian Ramamoorthy School of Informatics 5 March 2012 Consider Motion Problems with Many Agents How should we model
Co-evolution for Communication: An EHW Approach
 Journal of Universal Computer Science, vol. 13, no. 9 (2007), 1300-1308 submitted: 12/6/06, accepted: 24/10/06, appeared: 28/9/07 J.UCS Co-evolution for Communication: An EHW Approach Yasser Baleghi Damavandi,
Journal of Universal Computer Science, vol. 13, no. 9 (2007), 1300-1308 submitted: 12/6/06, accepted: 24/10/06, appeared: 28/9/07 J.UCS Co-evolution for Communication: An EHW Approach Yasser Baleghi Damavandi,
Real- Time Computer Vision and Robotics Using Analog VLSI Circuits
 750 Koch, Bair, Harris, Horiuchi, Hsu and Luo Real- Time Computer Vision and Robotics Using Analog VLSI Circuits Christof Koch Wyeth Bair John. Harris Timothy Horiuchi Andrew Hsu Jin Luo Computation and
750 Koch, Bair, Harris, Horiuchi, Hsu and Luo Real- Time Computer Vision and Robotics Using Analog VLSI Circuits Christof Koch Wyeth Bair John. Harris Timothy Horiuchi Andrew Hsu Jin Luo Computation and
EXERCISE 1: CREATE LINE SPARKLINES
 EXERCISE 1: CREATE LINE SPARKLINES In this exercise you ll create line sparklines. Then you ll convert the line type to the column type. Part 1: Create the sparklines Before you start, notice that the
EXERCISE 1: CREATE LINE SPARKLINES In this exercise you ll create line sparklines. Then you ll convert the line type to the column type. Part 1: Create the sparklines Before you start, notice that the
Sketching Fundamentals
 Sketching Fundamentals Learning Outcome When you complete this module you will be able to: Make basic engineering sketches of plant equipment. Learning Objectives Here is what you will be able to do when
Sketching Fundamentals Learning Outcome When you complete this module you will be able to: Make basic engineering sketches of plant equipment. Learning Objectives Here is what you will be able to do when
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Dodecahedron with Windows
 Dodecahedron with Windows Designed by David Mitchell and Francis Ow. This robust version of the regular dodecahedron is made from thirty modules, each of which contributes part of two faces to the form.
Dodecahedron with Windows Designed by David Mitchell and Francis Ow. This robust version of the regular dodecahedron is made from thirty modules, each of which contributes part of two faces to the form.
Excel Tool: Plots of Data Sets
 Excel Tool: Plots of Data Sets Excel makes it very easy for the scientist to visualize a data set. In this assignment, we learn how to produce various plots of data sets. Open a new Excel workbook, and
Excel Tool: Plots of Data Sets Excel makes it very easy for the scientist to visualize a data set. In this assignment, we learn how to produce various plots of data sets. Open a new Excel workbook, and
CMSC 426, Fall 2012 Problem Set 4 Due October 25
 CMSC 46, Fall 01 Problem Set 4 Due October 5 In this problem set you will implement a mincut approach to image segmentation. This algorithm has been discussed in class. The class web page also contains
CMSC 46, Fall 01 Problem Set 4 Due October 5 In this problem set you will implement a mincut approach to image segmentation. This algorithm has been discussed in class. The class web page also contains
Three connections between origami and mathematics. May 8, 2011
 Three connections between origami and mathematics May 8, 2011 What is origami? From Japanese: oro, meaning to fold, and kami, meaning paper A form of visual/sculptural representation that is defined primarily
Three connections between origami and mathematics May 8, 2011 What is origami? From Japanese: oro, meaning to fold, and kami, meaning paper A form of visual/sculptural representation that is defined primarily
What is the sum of the positive integer factors of 12?
 1. $ Three investors decided to buy a time machine, with each person paying an equal share of the purchase price. If the purchase price was $6000, how much did each investor pay? $6,000 2. What integer
1. $ Three investors decided to buy a time machine, with each person paying an equal share of the purchase price. If the purchase price was $6000, how much did each investor pay? $6,000 2. What integer
Coordinating Construction of Truss Structures using Distributed Equal-mass Partitioning
 Coordinating Construction of Truss Structures using Distributed Equal-mass Partitioning The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters.
Coordinating Construction of Truss Structures using Distributed Equal-mass Partitioning The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters.
Homeostasis Lighting Control System Using a Sensor Agent Robot
 Intelligent Control and Automation, 2013, 4, 138-153 http://dx.doi.org/10.4236/ica.2013.42019 Published Online May 2013 (http://www.scirp.org/journal/ica) Homeostasis Lighting Control System Using a Sensor
Intelligent Control and Automation, 2013, 4, 138-153 http://dx.doi.org/10.4236/ica.2013.42019 Published Online May 2013 (http://www.scirp.org/journal/ica) Homeostasis Lighting Control System Using a Sensor
An Introduction To Modular Robots
 An Introduction To Modular Robots Introduction Morphology and Classification Locomotion Applications Challenges 11/24/09 Sebastian Rockel Introduction Definition (Robot) A robot is an artificial, intelligent,
An Introduction To Modular Robots Introduction Morphology and Classification Locomotion Applications Challenges 11/24/09 Sebastian Rockel Introduction Definition (Robot) A robot is an artificial, intelligent,
1) Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg)
 Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg)") 1) Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg) 6) Virtual Ecosystems & Perspectives (sb) Inspired
1) Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg) 6) Virtual Ecosystems & Perspectives (sb) Inspired
NanoFabrics: : Spatial Computing Using Molecular Electronics
 NanoFabrics: : Spatial Computing Using Molecular Electronics Seth Copen Goldstein and Mihai Budiu Computer Architecture, 2001. Proceedings. 28th Annual International Symposium on 30 June-4 4 July 2001
NanoFabrics: : Spatial Computing Using Molecular Electronics Seth Copen Goldstein and Mihai Budiu Computer Architecture, 2001. Proceedings. 28th Annual International Symposium on 30 June-4 4 July 2001
Learning Behaviors for Environment Modeling by Genetic Algorithm
 Learning Behaviors for Environment Modeling by Genetic Algorithm Seiji Yamada Department of Computational Intelligence and Systems Science Interdisciplinary Graduate School of Science and Engineering Tokyo
Learning Behaviors for Environment Modeling by Genetic Algorithm Seiji Yamada Department of Computational Intelligence and Systems Science Interdisciplinary Graduate School of Science and Engineering Tokyo
CS 4501: Introduction to Computer Vision. Filtering and Edge Detection
 CS 451: Introduction to Computer Vision Filtering and Edge Detection Connelly Barnes Slides from Jason Lawrence, Fei Fei Li, Juan Carlos Niebles, Misha Kazhdan, Allison Klein, Tom Funkhouser, Adam Finkelstein,
CS 451: Introduction to Computer Vision Filtering and Edge Detection Connelly Barnes Slides from Jason Lawrence, Fei Fei Li, Juan Carlos Niebles, Misha Kazhdan, Allison Klein, Tom Funkhouser, Adam Finkelstein,
Formation Maintenance for Autonomous Robots by Steering Behavior Parameterization
 Formation Maintenance for Autonomous Robots by Steering Behavior Parameterization MAITE LÓPEZ-SÁNCHEZ, JESÚS CERQUIDES WAI Volume Visualization and Artificial Intelligence Research Group, MAiA Dept. Universitat
Formation Maintenance for Autonomous Robots by Steering Behavior Parameterization MAITE LÓPEZ-SÁNCHEZ, JESÚS CERQUIDES WAI Volume Visualization and Artificial Intelligence Research Group, MAiA Dept. Universitat
Learning Log Title: CHAPTER 2: ARITHMETIC STRATEGIES AND AREA. Date: Lesson: Chapter 2: Arithmetic Strategies and Area
 Chapter 2: Arithmetic Strategies and Area CHAPTER 2: ARITHMETIC STRATEGIES AND AREA Date: Lesson: Learning Log Title: Date: Lesson: Learning Log Title: Chapter 2: Arithmetic Strategies and Area Date: Lesson:
Chapter 2: Arithmetic Strategies and Area CHAPTER 2: ARITHMETIC STRATEGIES AND AREA Date: Lesson: Learning Log Title: Date: Lesson: Learning Log Title: Chapter 2: Arithmetic Strategies and Area Date: Lesson:
10.13 Sample A.G.E. program
 The chord angle is the angle that is measured counter clockwise as positive from the beginning to the end points. 10.13 Sample A.G.E. program Consider this profile made up of 9 lines and arcs Notice what
The chord angle is the angle that is measured counter clockwise as positive from the beginning to the end points. 10.13 Sample A.G.E. program Consider this profile made up of 9 lines and arcs Notice what
Introduction to 3D CAD with SolidWorks. Jianan Li
 Introduction to 3D CAD with SolidWorks Jianan Li Create a New Part The first time you launch SolidWorks, it asks you to set the default units and dimension standard. Make sure you have IPS and ANSI selected,
Introduction to 3D CAD with SolidWorks Jianan Li Create a New Part The first time you launch SolidWorks, it asks you to set the default units and dimension standard. Make sure you have IPS and ANSI selected,
Project: Snow Crystals
 DESIGNER: GAIL KESSLER Capture the feeling of winter in a striking wall hanging. without the prior written consent of Meredith Corporation. Meredith Corporation 07. All rights reserved. Materials 7 8 yard
DESIGNER: GAIL KESSLER Capture the feeling of winter in a striking wall hanging. without the prior written consent of Meredith Corporation. Meredith Corporation 07. All rights reserved. Materials 7 8 yard
Formica ex Machina: Ant Swarm Foraging from Physical to Virtual and Back Again
 Formica ex Machina: Ant Swarm Foraging from Physical to Virtual and Back Again Joshua P. Hecker 1, Kenneth Letendre 1,2, Karl Stolleis 1, Daniel Washington 1, and Melanie E. Moses 1,2 1 Department of Computer
Formica ex Machina: Ant Swarm Foraging from Physical to Virtual and Back Again Joshua P. Hecker 1, Kenneth Letendre 1,2, Karl Stolleis 1, Daniel Washington 1, and Melanie E. Moses 1,2 1 Department of Computer
Design Methods for Polymorphic Digital Circuits
 Design Methods for Polymorphic Digital Circuits Lukáš Sekanina Faculty of Information Technology, Brno University of Technology Božetěchova 2, 612 66 Brno, Czech Republic sekanina@fit.vutbr.cz Abstract.
Design Methods for Polymorphic Digital Circuits Lukáš Sekanina Faculty of Information Technology, Brno University of Technology Božetěchova 2, 612 66 Brno, Czech Republic sekanina@fit.vutbr.cz Abstract.
COMPUTATONAL INTELLIGENCE
 COMPUTATONAL INTELLIGENCE October 2011 November 2011 Siegfried Nijssen partially based on slides by Uzay Kaymak Leiden Institute of Advanced Computer Science e-mail: snijssen@liacs.nl Katholieke Universiteit
COMPUTATONAL INTELLIGENCE October 2011 November 2011 Siegfried Nijssen partially based on slides by Uzay Kaymak Leiden Institute of Advanced Computer Science e-mail: snijssen@liacs.nl Katholieke Universiteit
UNIT 1 Indices Activities
 UNIT 1 Indices Activities Activities 1.1 Multiplication Table 1.2 Secret Letter 1.3 Last Digit 1.4 Diagonals 1.5 Stepping Stones 1.6 Factors 1.7 Sieve of Eratosthenes 1.8 Chain Letters 1.9 Define 1.10
UNIT 1 Indices Activities Activities 1.1 Multiplication Table 1.2 Secret Letter 1.3 Last Digit 1.4 Diagonals 1.5 Stepping Stones 1.6 Factors 1.7 Sieve of Eratosthenes 1.8 Chain Letters 1.9 Define 1.10
Inside Outside Circles Outside Circles Inside. Regions Circles Inside Regions Outside Regions. Outside Inside Regions Circles Inside Outside
 START Inside Outside Circles Outside Circles Inside Regions Circles Inside Regions Outside Regions Outside Inside Regions Circles Inside Outside Circles Regions Outside Inside Regions Circles FINISH Each
START Inside Outside Circles Outside Circles Inside Regions Circles Inside Regions Outside Regions Outside Inside Regions Circles Inside Outside Circles Regions Outside Inside Regions Circles FINISH Each
mario block plush a sewing pattern by
 mario block plush a sewing pattern by mario block plush difficulty: This plush was of course inspired by the? block from the various Super Mario games. It s a simple cube done up with the details to make
mario block plush a sewing pattern by mario block plush difficulty: This plush was of course inspired by the? block from the various Super Mario games. It s a simple cube done up with the details to make
Portable Sensor Motes as a Distributed Communication Medium for Large Groups of Mobile Robots
 1 Portable Sensor Motes as a Distributed Communication Medium for Large Groups of Mobile Robots Sean Luke sean@cs.gmu.edu Katherine Russell krusselc@gmu.edu Department of Computer Science George Mason
1 Portable Sensor Motes as a Distributed Communication Medium for Large Groups of Mobile Robots Sean Luke sean@cs.gmu.edu Katherine Russell krusselc@gmu.edu Department of Computer Science George Mason
LMI Monthly Test May 2010 Instruction Booklet
 Submit at http://www.logicmastersindia.com/m201005 LMI Monthly Test May 2010 Instruction Booklet Forum http://logicmastersindia.com/forum/forums/thread-view.asp?tid=53 Start Time 22-May-2010 20:00 IST
Submit at http://www.logicmastersindia.com/m201005 LMI Monthly Test May 2010 Instruction Booklet Forum http://logicmastersindia.com/forum/forums/thread-view.asp?tid=53 Start Time 22-May-2010 20:00 IST
Learning Reactive Neurocontrollers using Simulated Annealing for Mobile Robots
 Learning Reactive Neurocontrollers using Simulated Annealing for Mobile Robots Philippe Lucidarme, Alain Liégeois LIRMM, University Montpellier II, France, lucidarm@lirmm.fr Abstract This paper presents
Learning Reactive Neurocontrollers using Simulated Annealing for Mobile Robots Philippe Lucidarme, Alain Liégeois LIRMM, University Montpellier II, France, lucidarm@lirmm.fr Abstract This paper presents
Fault Tolerance in VLSI Systems
 Fault Tolerance in VLSI Systems Overview Opportunities presented by VLSI Problems presented by VLSI Redundancy techniques in VLSI design environment Duplication with complementary logic Self-checking logic
Fault Tolerance in VLSI Systems Overview Opportunities presented by VLSI Problems presented by VLSI Redundancy techniques in VLSI design environment Duplication with complementary logic Self-checking logic
Study and Simulation of Fault Tolerant Quantum Cellular Automata Structures
 Study and Simulation of Fault Tolerant Quantum Cellular Automata Structures Dr. E.N.Ganesh, 2 R.Kaushik Ragavan, M.Krishna Kumar and V.Krishnan Abstract Quantum cellular automata (QCA) is a new technology
Study and Simulation of Fault Tolerant Quantum Cellular Automata Structures Dr. E.N.Ganesh, 2 R.Kaushik Ragavan, M.Krishna Kumar and V.Krishnan Abstract Quantum cellular automata (QCA) is a new technology
s sheets Programming and Controlling Self-Folding Robots a) b) c) d) Byoungkwon An* Daniela Rus*
 b) c) d) Byoungkwon An* Daniela Rus*") 2012 IEEE International Conference on Robotics and Automation RiverCentre, Saint Paul, Minnesota, USA May 14-18, 2012 Programming and Controlling Self-Folding Robots Byoungkwon An* dran@csail.mit.edu Abstract
2012 IEEE International Conference on Robotics and Automation RiverCentre, Saint Paul, Minnesota, USA May 14-18, 2012 Programming and Controlling Self-Folding Robots Byoungkwon An* dran@csail.mit.edu Abstract
Michael Rubenstein Curriculum Vitae
 Michael Rubenstein Curriculum Vitae McCormick School of Engineering Northwestern University Evanston, IL 60201 email: rubenstein@northwestern.edu web: users.eecs.northwestern.edu/~mrubenst/ Research Interests
Michael Rubenstein Curriculum Vitae McCormick School of Engineering Northwestern University Evanston, IL 60201 email: rubenstein@northwestern.edu web: users.eecs.northwestern.edu/~mrubenst/ Research Interests
Sorting in Swarm Robots Using Communication-Based Cluster Size Estimation
 Sorting in Swarm Robots Using Communication-Based Cluster Size Estimation Hongli Ding and Heiko Hamann Department of Computer Science, University of Paderborn, Paderborn, Germany hongli.ding@uni-paderborn.de,
Sorting in Swarm Robots Using Communication-Based Cluster Size Estimation Hongli Ding and Heiko Hamann Department of Computer Science, University of Paderborn, Paderborn, Germany hongli.ding@uni-paderborn.de,
Incorporating Variability into Design
 Incorporating Variability into Design Jim Farrell, AMD Designing Robust Digital Circuits Workshop UC Berkeley 28 July 2006 Outline Motivation Hierarchy of Design tradeoffs Design Infrastructure for variability
Incorporating Variability into Design Jim Farrell, AMD Designing Robust Digital Circuits Workshop UC Berkeley 28 July 2006 Outline Motivation Hierarchy of Design tradeoffs Design Infrastructure for variability
Lecture 9: Clocking for High Performance Processors
 Lecture 9: Clocking for High Performance Processors Computer Systems Lab Stanford University horowitz@stanford.edu Copyright 2001 Mark Horowitz EE371 Lecture 9-1 Horowitz Overview Reading Bailey Stojanovic
Lecture 9: Clocking for High Performance Processors Computer Systems Lab Stanford University horowitz@stanford.edu Copyright 2001 Mark Horowitz EE371 Lecture 9-1 Horowitz Overview Reading Bailey Stojanovic
Microelectronics, BSc course
 Microelectronics, BSc course MOS inverters http://www.eet.bme.hu/~poppe/miel/en/13-mosfet2.pptx http://www.eet.bme.hu Overview of MSOFET types 13-11-2014 Microelectronics BSc course, MOS inverters András
Microelectronics, BSc course MOS inverters http://www.eet.bme.hu/~poppe/miel/en/13-mosfet2.pptx http://www.eet.bme.hu Overview of MSOFET types 13-11-2014 Microelectronics BSc course, MOS inverters András
Developing Frogger Player Intelligence Using NEAT and a Score Driven Fitness Function
 Developing Frogger Player Intelligence Using NEAT and a Score Driven Fitness Function Davis Ancona and Jake Weiner Abstract In this report, we examine the plausibility of implementing a NEAT-based solution
Developing Frogger Player Intelligence Using NEAT and a Score Driven Fitness Function Davis Ancona and Jake Weiner Abstract In this report, we examine the plausibility of implementing a NEAT-based solution
Robot Task-Level Programming Language and Simulation
 Robot Task-Level Programming Language and Simulation M. Samaka Abstract This paper presents the development of a software application for Off-line robot task programming and simulation. Such application
Robot Task-Level Programming Language and Simulation M. Samaka Abstract This paper presents the development of a software application for Off-line robot task programming and simulation. Such application
Folding Activity 3. Compass Colored paper Tape or glue stick
 Folding Activity 3 Part 1 You re not done until everyone in your group is done! If you finish before someone else, help them finish before starting on the next part. You ll need: Patty paper Ruler Sharpie
Folding Activity 3 Part 1 You re not done until everyone in your group is done! If you finish before someone else, help them finish before starting on the next part. You ll need: Patty paper Ruler Sharpie
Traffic Control for a Swarm of Robots: Avoiding Target Congestion
 Traffic Control for a Swarm of Robots: Avoiding Target Congestion Leandro Soriano Marcolino and Luiz Chaimowicz Abstract One of the main problems in the navigation of robotic swarms is when several robots
Traffic Control for a Swarm of Robots: Avoiding Target Congestion Leandro Soriano Marcolino and Luiz Chaimowicz Abstract One of the main problems in the navigation of robotic swarms is when several robots
Comparing Methods for Solving Kuromasu Puzzles
 Comparing Methods for Solving Kuromasu Puzzles Leiden Institute of Advanced Computer Science Bachelor Project Report Tim van Meurs Abstract The goal of this bachelor thesis is to examine different methods
Comparing Methods for Solving Kuromasu Puzzles Leiden Institute of Advanced Computer Science Bachelor Project Report Tim van Meurs Abstract The goal of this bachelor thesis is to examine different methods
How can Robots learn from Honeybees?
 How can Robots learn from Honeybees? Karl Crailsheim, Ronald Thenius, ChristophMöslinger, Thomas Schmickl Apimondia 2009, Montpellier Beyond robotics Definition of robot : Robots A device that automatically
How can Robots learn from Honeybees? Karl Crailsheim, Ronald Thenius, ChristophMöslinger, Thomas Schmickl Apimondia 2009, Montpellier Beyond robotics Definition of robot : Robots A device that automatically
Maze Solving Algorithms for Micro Mouse
 Maze Solving Algorithms for Micro Mouse Surojit Guha Sonender Kumar surojitguha1989@gmail.com sonenderkumar@gmail.com Abstract The problem of micro-mouse is 30 years old but its importance in the field
Maze Solving Algorithms for Micro Mouse Surojit Guha Sonender Kumar surojitguha1989@gmail.com sonenderkumar@gmail.com Abstract The problem of micro-mouse is 30 years old but its importance in the field
Evolving and Analysing Useful Redundant Logic
 Evolving and Analysing Useful Redundant Logic Asbjoern Djupdal and Pauline C. Haddow CRAB Lab Department of Computer and Information Science Norwegian University of Science and Technology {djupdal,pauline}@idi.ntnu.no
Evolving and Analysing Useful Redundant Logic Asbjoern Djupdal and Pauline C. Haddow CRAB Lab Department of Computer and Information Science Norwegian University of Science and Technology {djupdal,pauline}@idi.ntnu.no
Automated Shingling. Team 1, Robot Autonomy (16-662), Spring Eitan Babcock, Dan Berman, Sean Bryan, Rushat Gupta Chadha, Pranav Maheshwari
, Spring Eitan Babcock, Dan Berman, Sean Bryan, Rushat Gupta Chadha, Pranav Maheshwari") Automated Shingling Team 1, Robot Autonomy (16-662), Spring 2016 Eitan Babcock, Dan Berman, Sean Bryan, Rushat Gupta Chadha, Pranav Maheshwari Table of Contents The Problem.....2 Background.. 2 What we
Automated Shingling Team 1, Robot Autonomy (16-662), Spring 2016 Eitan Babcock, Dan Berman, Sean Bryan, Rushat Gupta Chadha, Pranav Maheshwari Table of Contents The Problem.....2 Background.. 2 What we
Using Curves and Histograms
 Written by Jonathan Sachs Copyright 1996-2003 Digital Light & Color Introduction Although many of the operations, tools, and terms used in digital image manipulation have direct equivalents in conventional
Written by Jonathan Sachs Copyright 1996-2003 Digital Light & Color Introduction Although many of the operations, tools, and terms used in digital image manipulation have direct equivalents in conventional
Learning Guide. ASR Automated Systems Research Inc. # Douglas Crescent, Langley, BC. V3A 4B6. Fax:
 Learning Guide ASR Automated Systems Research Inc. #1 20461 Douglas Crescent, Langley, BC. V3A 4B6 Toll free: 1-800-818-2051 e-mail: support@asrsoft.com Fax: 604-539-1334 www.asrsoft.com Copyright 1991-2013
Learning Guide ASR Automated Systems Research Inc. #1 20461 Douglas Crescent, Langley, BC. V3A 4B6 Toll free: 1-800-818-2051 e-mail: support@asrsoft.com Fax: 604-539-1334 www.asrsoft.com Copyright 1991-2013
DESIGN AND DEVELOPMENT OF RF BASED MODULAR ROBOTS WITH LOCAL AND GLOBAL COMMUNICATION
 DESIGN AND DEVELOPMENT OF RF BASED MODULAR ROBOTS WITH LOCAL AND GLOBAL COMMUNICATION K. Jagadeesh Babu, B. Kiran Kumar, G.Vyshnavi Devi, K. Pramodh Kumar, and V. Rama Krishna Department of ECE, St.Ann
DESIGN AND DEVELOPMENT OF RF BASED MODULAR ROBOTS WITH LOCAL AND GLOBAL COMMUNICATION K. Jagadeesh Babu, B. Kiran Kumar, G.Vyshnavi Devi, K. Pramodh Kumar, and V. Rama Krishna Department of ECE, St.Ann
Student Name: Teacher: Date: District: Rowan. Assessment: 9_12 T and I IC61 - Drafting I Test 2. Description: Drafting 1 - Test 6.
 Student Name: Teacher: Date: District: Rowan Assessment: 9_12 T and I IC61 - Drafting I Test 2 Description: Drafting 1 - Test 6 Form: 501 1. 2X on a hole note means: A. Double the size of the hole. B.
Student Name: Teacher: Date: District: Rowan Assessment: 9_12 T and I IC61 - Drafting I Test 2 Description: Drafting 1 - Test 6 Form: 501 1. 2X on a hole note means: A. Double the size of the hole. B.
Finishes Size: 95" x 95" 2000, 2015, RJR Fabrics. All rights reserved. r
 Finishes Size: 9" x 9" 000, 0, RJR Fabrics. All rights reserved. r0.06- New Moon features a mariner s compass block alternated with a traditional pineapple block. Set side-by-side and with carefully shaded
Finishes Size: 9" x 9" 000, 0, RJR Fabrics. All rights reserved. r0.06- New Moon features a mariner s compass block alternated with a traditional pineapple block. Set side-by-side and with carefully shaded
Learning Outcomes. Spiral 2 8. Digital Design Overview LAYOUT
 2-8.1 2-8.2 Spiral 2 8 Cell Mark Redekopp earning Outcomes I understand how a digital circuit is composed of layers of materials forming transistors and wires I understand how each layer is expressed as
2-8.1 2-8.2 Spiral 2 8 Cell Mark Redekopp earning Outcomes I understand how a digital circuit is composed of layers of materials forming transistors and wires I understand how each layer is expressed as