Swarm Robotics. Lecturer: Roderich Gross
|
|
|
- Donna Merritt
- 6 years ago
- Views:
Transcription
1 Swarm Robotics Lecturer: Roderich Gross 1
2 Outline Why swarm robotics? Example domains: Coordinated exploration Transportation and clustering Reconfigurable robots Summary Stigmergy revisited 2















3 Sources of Inspiration 3




4 Example 4




5 Key Properties Composed of many individuals The individuals are relatively homogeneous. The individuals are relatively incapable. The interactions among the individuals are based on simple behavioral rules that exploit only local information. The overall behavior results from a self-organized process. 5
6 Technological Motivations Robustness Scalability Versatility / flexibility Super linearity Low cost? 6
7 Coordinated Exploration 1. Environmental monitoring 2. Pheromone robotics 3. Chaining 7



8 Example 1: Environmental Monitoring Swarm of mobile robots for localizing an odor source Simple behaviors based on odor and wind detection Communication can help to increase the efficiency. Hayes et al.,






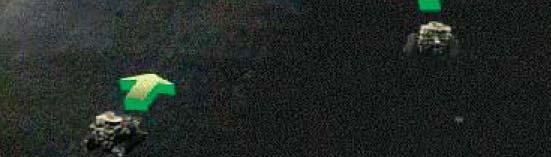
9 Example 2: Pheromone Robotics robot dispersion gradient (via hop counts) shortest path Payton et al., 2005 pheromone diffussion / evaporation 9
10 Example 3: Chaining Limited sensing range Signaling of colors (directional chains) Nouyan et al.,





")





11 Example 3: Chaining (Cont.) Mondada et al., 2005 Chains in prey retrieval (division of labor) Nouyan et al.,
12 Transportation and Clustering 1. Coordinated box pushing 2. Blind bulldozing 3. Clustering 4. Cooperative Manipulation 12
13 Example 1: Coordinated Box Pushing Task requires cooperation No explicit communication Behavior-based approach Ant-inspired stagnation recovery mechanism Kube and Zhang, 1993; Kube and Bonabeau, 2000 al., 1978 dobler et a Hoelld 13




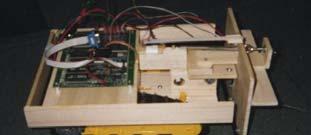

14 Example 2: Blind Bulldozing Force sensitive plow Nest construction by ants Nest construction by robots Franks et al., 1992 Parker et al.,




:")




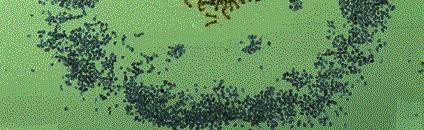
15 Example 3: Clustering Clustering and sorting behavior can be observed in several ant species. Important mechanisms: stigmergic communication positive & negative feedback Example rule (N = #objects experienced in a short time window): 1. Probability to pick up an object: inversely proportional to N 2. Probability to deposit an object: directly proportional p to N Cemetery clusters in Messor sancta, 26 hours in total, 1500 corpses 15

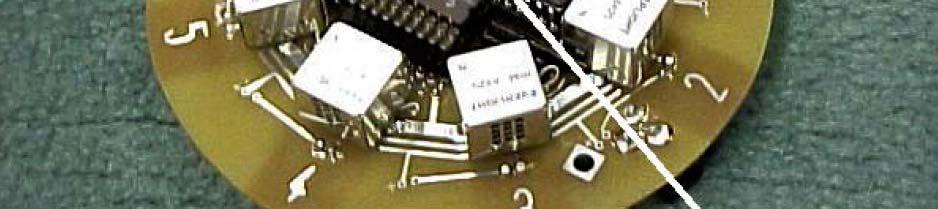
16 Example 4: Cooperative Manipulation Desert ants cooperate to pull out of the ground long sticks (too long for a single ant). This behavior can be reproduced with a group of robots. How long to wait for a teammate? Super-linear performance: # sticks retrieved per robot is optimal for ca. 6-robot groups. Ijspeert et al.,


17 Reconfigurable Robots A modular robot, usually composed of several identical components, which can be re-organized to create morphologies suitable for different tasks. Inspiration: cells (cellular automata) individuals (swarm intelligence) Chain-type reconfigurable robots Lattice-type reconfigurable robots Mobile reconfigurable robots Further types of reconfigurable robots 17
18 Reconfigurable Robots 18
19 Chain Type Example: CONRO Fully self-contained Pin-hole connector (+latch) Infrared-based guidance Docking relatively complex Good mobility ISI, USC; Castano et al.,
20 Chain Type Example: CONRO Control can cope with sudden changes in the robot s morphology. AdapTronics Group & ISI, USC 20



21 Chain Type Example: PolyBot PARC, 2000; Yim et al., 2002 Self-reconfiguration of PolyBot 1 DOF module Power PC 555 Externally powered 21







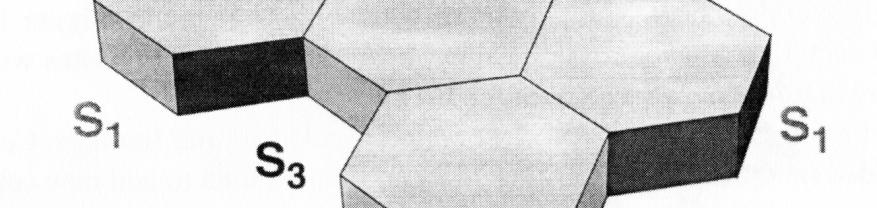
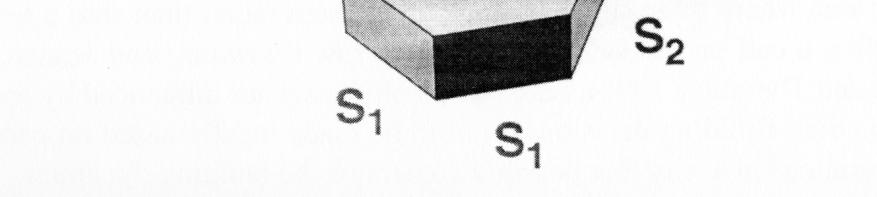
22 Lattice Type Example: A-TRON Two half-spheres 4 male and 4 female connectors Self-docking is relatively simple. Self-reconfiguration can require many steps. The Maersk McKinney Moller Inst., Univ. of Southern Denmark 22







23 Lattice Type Example: A-TRON The Maersk McKinney Moller Inst., Univ. of Southern Denmark 23

24 Hybrid Example: M-TRAN M-TRAN III (2005 -) Hybrid: lattice type & chain type Magnets or actuated mechanical hooks Cellular Automata rules AIST; Murata et al.,







25 Physical Cooperation of Mobile Individuals Passing a gap Nest building Grouped Fall Plugging potholes in the trail 25


26 From Swarming Ants to Swarm-bots Laboratory of Intelligent Systems Autonomous Systems Lab






27 Mobile Reconfigurable Robots Mobile units assemble into connected entities that are larger and stronger than any individual unit. Mondada et al., 2005; Gross et al.,
28 Example: Search & Rescue 28
29 Example: Search & Rescue (Cont.) 29




30 Other Types of Reconfigurable Robots Relative displacement without moving parts Electro-magnet rings Conversion of electrical to kinetic energy Claytronics Goldstein et al.,



31 Other Types of Reconfigurable Robots Stochastic reconfiguration of passively moving parts PPT Univ. of Washington; Klavins et al.,



32 Hierarchical Organization Meta-modules 1 Anatomy-based 2 1,2 The Maersk McKinney Moller Inst., Univ. of Southern Denmark 2 Intel Research Pittsburgh 32
33 Summary Swarm Intelligence: Key properties and technological motivations Coordinated Exploration Physical cooperation in ants and robots Reconfigurable robots 33
34 Stigmergy Revisited Communication through modification of the environment. The result of work by an individual leaves a persistent sign that affects the actions of (possibly other) individuals. Stimuli-response loop From Camazine et al., 2001 (Smith, 1978) 34
35 Stigmergy Revisited Testing how building activities are coordinated. Redundant structures Hole incorporated by human From Camazine et al., 2001 (Smith, 1978) 35


36 Stigmergy Revisited Nest construction rules (wasp combs) Camazine et al.,





37 Stigmergy Revisited Deterministic rule: Add cell to corner area if 2 or 3 adjacent walls are present. Probabilistic rule: Camazine et al.,
38 Stigmergy Distributed Construction Grushin and Reggia,
39 Termites Video Attenborough (BBC) / h? 39
CS 599: Distributed Intelligence in Robotics
 CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
Towards Artificial ATRON Animals: Scalable Anatomy for Self-Reconfigurable Robots
 Towards Artificial ATRON Animals: Scalable Anatomy for Self-Reconfigurable Robots David J. Christensen, David Brandt & Kasper Støy Robotics: Science & Systems Workshop on Self-Reconfigurable Modular Robots
Towards Artificial ATRON Animals: Scalable Anatomy for Self-Reconfigurable Robots David J. Christensen, David Brandt & Kasper Støy Robotics: Science & Systems Workshop on Self-Reconfigurable Modular Robots
Collective Robotics. Marcin Pilat
 Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Biological Inspirations for Distributed Robotics. Dr. Daisy Tang
 Biological Inspirations for Distributed Robotics Dr. Daisy Tang Outline Biological inspirations Understand two types of biological parallels Understand key ideas for distributed robotics obtained from
Biological Inspirations for Distributed Robotics Dr. Daisy Tang Outline Biological inspirations Understand two types of biological parallels Understand key ideas for distributed robotics obtained from
KOVAN Dept. of Computer Eng. Middle East Technical University Ankara, Turkey
 Swarm Robotics: From sources of inspiration to domains of application Erol Sahin KOVAN Dept. of Computer Eng. Middle East Technical University Ankara, Turkey http://www.kovan.ceng.metu.edu.tr What is Swarm
Swarm Robotics: From sources of inspiration to domains of application Erol Sahin KOVAN Dept. of Computer Eng. Middle East Technical University Ankara, Turkey http://www.kovan.ceng.metu.edu.tr What is Swarm
An Introduction To Modular Robots
 An Introduction To Modular Robots Introduction Morphology and Classification Locomotion Applications Challenges 11/24/09 Sebastian Rockel Introduction Definition (Robot) A robot is an artificial, intelligent,
An Introduction To Modular Robots Introduction Morphology and Classification Locomotion Applications Challenges 11/24/09 Sebastian Rockel Introduction Definition (Robot) A robot is an artificial, intelligent,
CS594, Section 30682:
 CS594, Section 30682: Distributed Intelligence in Autonomous Robotics Spring 2003 Tuesday/Thursday 11:10 12:25 http://www.cs.utk.edu/~parker/courses/cs594-spring03 Instructor: Dr. Lynne E. Parker ½ TA:
CS594, Section 30682: Distributed Intelligence in Autonomous Robotics Spring 2003 Tuesday/Thursday 11:10 12:25 http://www.cs.utk.edu/~parker/courses/cs594-spring03 Instructor: Dr. Lynne E. Parker ½ TA:
Praktikum: 9 Introduction to modular robots and first try
 18.272 Praktikum: 9 Introduction to modular robots and first try Lecturers Houxiang Zhang Manfred Grove TAMS, Department of Informatics, Germany @Tams/hzhang Institute TAMS s http://tams-www.informatik.uni-hamburg.de/hzhang
18.272 Praktikum: 9 Introduction to modular robots and first try Lecturers Houxiang Zhang Manfred Grove TAMS, Department of Informatics, Germany @Tams/hzhang Institute TAMS s http://tams-www.informatik.uni-hamburg.de/hzhang
PSYCO 457 Week 9: Collective Intelligence and Embodiment
 PSYCO 457 Week 9: Collective Intelligence and Embodiment Intelligent Collectives Cooperative Transport Robot Embodiment and Stigmergy Robots as Insects Emergence The world is full of examples of intelligence
PSYCO 457 Week 9: Collective Intelligence and Embodiment Intelligent Collectives Cooperative Transport Robot Embodiment and Stigmergy Robots as Insects Emergence The world is full of examples of intelligence
SWARM-BOT: A Swarm of Autonomous Mobile Robots with Self-Assembling Capabilities
 SWARM-BOT: A Swarm of Autonomous Mobile Robots with Self-Assembling Capabilities Francesco Mondada 1, Giovanni C. Pettinaro 2, Ivo Kwee 2, André Guignard 1, Luca Gambardella 2, Dario Floreano 1, Stefano
SWARM-BOT: A Swarm of Autonomous Mobile Robots with Self-Assembling Capabilities Francesco Mondada 1, Giovanni C. Pettinaro 2, Ivo Kwee 2, André Guignard 1, Luca Gambardella 2, Dario Floreano 1, Stefano
Review of Modular Self-Reconfigurable Robotic Systems Di Bao1, 2, a, Xueqian Wang1, 2, b, Hailin Huang1, 2, c, Bin Liang1, 2, 3, d, *
 2nd Workshop on Advanced Research and Technology in Industry Applications (WARTIA 2016) Review of Modular Self-Reconfigurable Robotic Systems Di Bao1, 2, a, Xueqian Wang1, 2, b, Hailin Huang1, 2, c, Bin
2nd Workshop on Advanced Research and Technology in Industry Applications (WARTIA 2016) Review of Modular Self-Reconfigurable Robotic Systems Di Bao1, 2, a, Xueqian Wang1, 2, b, Hailin Huang1, 2, c, Bin
An Introduction to Swarm Intelligence Issues
 An Introduction to Swarm Intelligence Issues Gianni Di Caro gianni@idsia.ch IDSIA, USI/SUPSI, Lugano (CH) 1 Topics that will be discussed Basic ideas behind the notion of Swarm Intelligence The role of
An Introduction to Swarm Intelligence Issues Gianni Di Caro gianni@idsia.ch IDSIA, USI/SUPSI, Lugano (CH) 1 Topics that will be discussed Basic ideas behind the notion of Swarm Intelligence The role of
Current Trends and Miniaturization Challenges for Modular Self-Reconfigurable Robotics
 1 Current Trends and Miniaturization Challenges for Modular Self-Reconfigurable Robotics Eric Schweikardt Computational Design Laboratory Carnegie Mellon University, Pittsburgh, PA 15213 tza@cmu.edu Abstract
1 Current Trends and Miniaturization Challenges for Modular Self-Reconfigurable Robotics Eric Schweikardt Computational Design Laboratory Carnegie Mellon University, Pittsburgh, PA 15213 tza@cmu.edu Abstract
Sequential Task Execution in a Minimalist Distributed Robotic System
 Sequential Task Execution in a Minimalist Distributed Robotic System Chris Jones Maja J. Matarić Computer Science Department University of Southern California 941 West 37th Place, Mailcode 0781 Los Angeles,
Sequential Task Execution in a Minimalist Distributed Robotic System Chris Jones Maja J. Matarić Computer Science Department University of Southern California 941 West 37th Place, Mailcode 0781 Los Angeles,
CSCI 445 Laurent Itti. Group Robotics. Introduction to Robotics L. Itti & M. J. Mataric 1
 Introduction to Robotics CSCI 445 Laurent Itti Group Robotics Introduction to Robotics L. Itti & M. J. Mataric 1 Today s Lecture Outline Defining group behavior Why group behavior is useful Why group behavior
Introduction to Robotics CSCI 445 Laurent Itti Group Robotics Introduction to Robotics L. Itti & M. J. Mataric 1 Today s Lecture Outline Defining group behavior Why group behavior is useful Why group behavior
Contact information. Tony White, Associate Professor
 Contact information Tony White, Associate Professor Office: Hertzberg 5354 Tel: 520-2600 x2208 Fax: 520-4334 E-mail: arpwhite@scs.carleton.ca E-mail: arpwhite@hotmail.com Web: http://www.scs.carleton.ca/~arpwhite
Contact information Tony White, Associate Professor Office: Hertzberg 5354 Tel: 520-2600 x2208 Fax: 520-4334 E-mail: arpwhite@scs.carleton.ca E-mail: arpwhite@hotmail.com Web: http://www.scs.carleton.ca/~arpwhite
INFORMATION AND COMMUNICATION TECHNOLOGIES IMPROVING EFFICIENCIES WAYFINDING SWARM CREATURES EXPLORING THE 3D DYNAMIC VIRTUAL WORLDS
 INFORMATION AND COMMUNICATION TECHNOLOGIES IMPROVING EFFICIENCIES Refereed Paper WAYFINDING SWARM CREATURES EXPLORING THE 3D DYNAMIC VIRTUAL WORLDS University of Sydney, Australia jyoo6711@arch.usyd.edu.au
INFORMATION AND COMMUNICATION TECHNOLOGIES IMPROVING EFFICIENCIES Refereed Paper WAYFINDING SWARM CREATURES EXPLORING THE 3D DYNAMIC VIRTUAL WORLDS University of Sydney, Australia jyoo6711@arch.usyd.edu.au
biologically-inspired computing lecture 20 Informatics luis rocha 2015 biologically Inspired computing INDIANA UNIVERSITY
 lecture 20 -inspired Sections I485/H400 course outlook Assignments: 35% Students will complete 4/5 assignments based on algorithms presented in class Lab meets in I1 (West) 109 on Lab Wednesdays Lab 0
lecture 20 -inspired Sections I485/H400 course outlook Assignments: 35% Students will complete 4/5 assignments based on algorithms presented in class Lab meets in I1 (West) 109 on Lab Wednesdays Lab 0
Sorting in Swarm Robots Using Communication-Based Cluster Size Estimation
 Sorting in Swarm Robots Using Communication-Based Cluster Size Estimation Hongli Ding and Heiko Hamann Department of Computer Science, University of Paderborn, Paderborn, Germany hongli.ding@uni-paderborn.de,
Sorting in Swarm Robots Using Communication-Based Cluster Size Estimation Hongli Ding and Heiko Hamann Department of Computer Science, University of Paderborn, Paderborn, Germany hongli.ding@uni-paderborn.de,
Swarm Intelligence. Corey Fehr Merle Good Shawn Keown Gordon Fedoriw
 Swarm Intelligence Corey Fehr Merle Good Shawn Keown Gordon Fedoriw Ants in the Pants! An Overview Real world insect examples Theory of Swarm Intelligence From Insects to Realistic A.I. Algorithms Examples
Swarm Intelligence Corey Fehr Merle Good Shawn Keown Gordon Fedoriw Ants in the Pants! An Overview Real world insect examples Theory of Swarm Intelligence From Insects to Realistic A.I. Algorithms Examples
Université Libre de Bruxelles
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Self-assembly of Mobile Robots: From Swarm-bot to Super-mechano Colony Roderich
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Self-assembly of Mobile Robots: From Swarm-bot to Super-mechano Colony Roderich
Group Transport Along a Robot Chain in a Self-Organised Robot Colony
 Intelligent Autonomous Systems 9 T. Arai et al. (Eds.) IOS Press, 2006 2006 The authors. All rights reserved. 433 Group Transport Along a Robot Chain in a Self-Organised Robot Colony Shervin Nouyan a,
Intelligent Autonomous Systems 9 T. Arai et al. (Eds.) IOS Press, 2006 2006 The authors. All rights reserved. 433 Group Transport Along a Robot Chain in a Self-Organised Robot Colony Shervin Nouyan a,
SWARM ROBOTICS: PART 2. Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St.
 SWARM ROBOTICS: PART 2 Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St. John s, Canada PRINCIPLE: SELF-ORGANIZATION 2 SELF-ORGANIZATION Self-organization
SWARM ROBOTICS: PART 2 Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St. John s, Canada PRINCIPLE: SELF-ORGANIZATION 2 SELF-ORGANIZATION Self-organization
CORC 3303 Exploring Robotics. Why Teams?
 Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
SWARM ROBOTICS: PART 2
 SWARM ROBOTICS: PART 2 PRINCIPLE: SELF-ORGANIZATION Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St. John s, Canada 2 SELF-ORGANIZATION SO in Non-Biological
SWARM ROBOTICS: PART 2 PRINCIPLE: SELF-ORGANIZATION Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St. John s, Canada 2 SELF-ORGANIZATION SO in Non-Biological
Reconnectable Joints for Self-Reconfigurable Robots
 Reconnectable Joints for Self-Reconfigurable Robots Behrokh Khoshnevis*, Robert Kovac, Wei-Min Shen, Peter Will Information Sciences Institute 4676 Admiralty Way, Marina del Rey, CA 90292 Department of
Reconnectable Joints for Self-Reconfigurable Robots Behrokh Khoshnevis*, Robert Kovac, Wei-Min Shen, Peter Will Information Sciences Institute 4676 Admiralty Way, Marina del Rey, CA 90292 Department of
Prototype Design of a Rubik Snake Robot
 Prototype Design of a Rubik Snake Robot Xin Zhang and Jinguo Liu Abstract This paper presents a reconfigurable modular mechanism Rubik Snake robot, which can change its configurations by changing the position
Prototype Design of a Rubik Snake Robot Xin Zhang and Jinguo Liu Abstract This paper presents a reconfigurable modular mechanism Rubik Snake robot, which can change its configurations by changing the position
Cooperation through self-assembly in multi-robot systems
 Cooperation through self-assembly in multi-robot systems ELIO TUCI IRIDIA - Université Libre de Bruxelles - Belgium RODERICH GROSS IRIDIA - Université Libre de Bruxelles - Belgium VITO TRIANNI IRIDIA -
Cooperation through self-assembly in multi-robot systems ELIO TUCI IRIDIA - Université Libre de Bruxelles - Belgium RODERICH GROSS IRIDIA - Université Libre de Bruxelles - Belgium VITO TRIANNI IRIDIA -
Design of Adaptive Collective Foraging in Swarm Robotic Systems
 Western Michigan University ScholarWorks at WMU Dissertations Graduate College 5-2010 Design of Adaptive Collective Foraging in Swarm Robotic Systems Hanyi Dai Western Michigan University Follow this and
Western Michigan University ScholarWorks at WMU Dissertations Graduate College 5-2010 Design of Adaptive Collective Foraging in Swarm Robotic Systems Hanyi Dai Western Michigan University Follow this and
Université Libre de Bruxelles
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Cooperation through self-assembling in multi-robot systems ELIO TUCI, RODERICH
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Cooperation through self-assembling in multi-robot systems ELIO TUCI, RODERICH
1) Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg)
 Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg)") 1) Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg) 6) Virtual Ecosystems & Perspectives (sb) Inspired
1) Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg) 6) Virtual Ecosystems & Perspectives (sb) Inspired
Swarm Robotics. Clustering and Sorting
 Swarm Robotics Clustering and Sorting By Andrew Vardy Associate Professor Computer Science / Engineering Memorial University of Newfoundland St. John s, Canada Deneubourg JL, Goss S, Franks N, Sendova-Franks
Swarm Robotics Clustering and Sorting By Andrew Vardy Associate Professor Computer Science / Engineering Memorial University of Newfoundland St. John s, Canada Deneubourg JL, Goss S, Franks N, Sendova-Franks
Bio-inspired Multiagent Systems
 Outline Bio-inspired Multiagent Systems Amorphous Computing pattern formation in silico Collective Construction by Robot Swarms shape and pattern in robotics Radhika Nagpal Computer Science, Harvard University
Outline Bio-inspired Multiagent Systems Amorphous Computing pattern formation in silico Collective Construction by Robot Swarms shape and pattern in robotics Radhika Nagpal Computer Science, Harvard University
Springer. Handbook oƒ. Computational Intelligence. Kacprzyk Pedrycz Editors
 Springer Handbook oƒ Computational Intelligence Kacprzyk Pedrycz Editors 1291 SwarmIntell 66. Swarm Intelligence in Optimization and Robotics Christian Blum, Roderich Groß PartF 66.1 Swarm intelligence
Springer Handbook oƒ Computational Intelligence Kacprzyk Pedrycz Editors 1291 SwarmIntell 66. Swarm Intelligence in Optimization and Robotics Christian Blum, Roderich Groß PartF 66.1 Swarm intelligence
Structure and Markings as Stimuli for Autonomous Construction
 Proceedings of the 2017 18th International Conference on Advanced Robotics (ICAR) Hong Kong, China, July 2017 Structure and Markings as Stimuli for Autonomous Construction Michael Allwright Department
Proceedings of the 2017 18th International Conference on Advanced Robotics (ICAR) Hong Kong, China, July 2017 Structure and Markings as Stimuli for Autonomous Construction Michael Allwright Department
SWARM INTELLIGENCE. Mario Pavone Department of Mathematics & Computer Science University of Catania
 Worker Ant #1: I'm lost! Where's the line? What do I do? Worker Ant #2: Help! Worker Ant #3: We'll be stuck here forever! Mr. Soil: Do not panic, do not panic. We are trained professionals. Now, stay calm.
Worker Ant #1: I'm lost! Where's the line? What do I do? Worker Ant #2: Help! Worker Ant #3: We'll be stuck here forever! Mr. Soil: Do not panic, do not panic. We are trained professionals. Now, stay calm.
Experiments on Fault-Tolerant Self-Reconfiguration and Emergent Self-Repair Christensen, David Johan
 Syddansk Universitet Experiments on Fault-Tolerant Self-Reconfiguration and Emergent Self-Repair Christensen, David Johan Published in: proceedings of Symposium on Artificial Life part of the IEEE
Syddansk Universitet Experiments on Fault-Tolerant Self-Reconfiguration and Emergent Self-Repair Christensen, David Johan Published in: proceedings of Symposium on Artificial Life part of the IEEE
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization
 Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
A Bio-inspired Multi-Robot Coordination Approach
 A Bio-inspired Multi-Robot Coordination Approach Yan Meng, Ọlọrundamilọla Kazeem and Jing Gan Department of Electrical and Computer Engineering Stevens Institute of Technology, Hoboen, NJ 07030 yan.meng@stevens.edu,
A Bio-inspired Multi-Robot Coordination Approach Yan Meng, Ọlọrundamilọla Kazeem and Jing Gan Department of Electrical and Computer Engineering Stevens Institute of Technology, Hoboen, NJ 07030 yan.meng@stevens.edu,
Hole Avoidance: Experiments in Coordinated Motion on Rough Terrain
 Hole Avoidance: Experiments in Coordinated Motion on Rough Terrain Vito Trianni, Stefano Nolfi, and Marco Dorigo IRIDIA - Université Libre de Bruxelles, Bruxelles, Belgium Institute of Cognitive Sciences
Hole Avoidance: Experiments in Coordinated Motion on Rough Terrain Vito Trianni, Stefano Nolfi, and Marco Dorigo IRIDIA - Université Libre de Bruxelles, Bruxelles, Belgium Institute of Cognitive Sciences
Collaboration Through the Exploitation of Local Interactions in Autonomous Collective Robotics: The Stick Pulling Experiment
 Autonomous Robots 11, 149 171, 2001 c 2001 Kluwer Academic Publishers. Manufactured in The Netherlands. Collaboration Through the Exploitation of Local Interactions in Autonomous Collective Robotics: The
Autonomous Robots 11, 149 171, 2001 c 2001 Kluwer Academic Publishers. Manufactured in The Netherlands. Collaboration Through the Exploitation of Local Interactions in Autonomous Collective Robotics: The
Université Libre de Bruxelles
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Cooperation through self-assembly in multi-robot systems Elio Tuci, Roderich Groß,
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Cooperation through self-assembly in multi-robot systems Elio Tuci, Roderich Groß,
Path formation in a robot swarm
 Swarm Intell (2008) 2: 1 23 DOI 10.1007/s11721-007-0009-6 Path formation in a robot swarm Self-organized strategies to find your way home Shervin Nouyan Alexandre Campo Marco Dorigo Received: 31 January
Swarm Intell (2008) 2: 1 23 DOI 10.1007/s11721-007-0009-6 Path formation in a robot swarm Self-organized strategies to find your way home Shervin Nouyan Alexandre Campo Marco Dorigo Received: 31 January
Self-reconfigurable Quadruped Robot: Design and Analysis Yang Zheng1, a, Zhiqin Qian* 1, b, Pingsheng Ma1, c and Tan Zhang2, d
 2nd Workshop on Advanced Research and Technology in Industry Applications (WARTIA 2016) Self-reconfigurable Quadruped Robot: Design and Analysis Yang Zheng1, a, Zhiqin Qian* 1, b, Pingsheng Ma1, c and
2nd Workshop on Advanced Research and Technology in Industry Applications (WARTIA 2016) Self-reconfigurable Quadruped Robot: Design and Analysis Yang Zheng1, a, Zhiqin Qian* 1, b, Pingsheng Ma1, c and
MASON. A Java Multi-agent Simulation Library. Sean Luke Gabriel Catalin Balan Liviu Panait Claudio Cioffi-Revilla Sean Paus
 MASON A Java Multi-agent Simulation Library Sean Luke Gabriel Catalin Balan Liviu Panait Claudio Cioffi-Revilla Sean Paus George Mason University s Center for Social Complexity and Department of Computer
MASON A Java Multi-agent Simulation Library Sean Luke Gabriel Catalin Balan Liviu Panait Claudio Cioffi-Revilla Sean Paus George Mason University s Center for Social Complexity and Department of Computer
Modeling Swarm Robotic Systems
 Modeling Swarm Robotic Systems Alcherio Martinoli and Kjerstin Easton California Institute of Technology, M/C 136-93, 1200 E. California Blvd. Pasadena, CA 91125, U.S.A. alcherio,easton@caltech.edu, http://www.coro.caltech.edu
Modeling Swarm Robotic Systems Alcherio Martinoli and Kjerstin Easton California Institute of Technology, M/C 136-93, 1200 E. California Blvd. Pasadena, CA 91125, U.S.A. alcherio,easton@caltech.edu, http://www.coro.caltech.edu
Subsumption Architecture in Swarm Robotics. Cuong Nguyen Viet 16/11/2015
 Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Comprehensive Review on Modular Self-Reconfigurable Robot Architecture
 Comprehensive Review on Modular Self-Reconfigurable Robot Architecture Muhammad Haziq Hasbulah 1, Fairul Azni Jafar 2, Mohd. Hisham Nordin 2 1Centre for Graduate Studies, Universiti Teknikal Malaysia Melaka,
Comprehensive Review on Modular Self-Reconfigurable Robot Architecture Muhammad Haziq Hasbulah 1, Fairul Azni Jafar 2, Mohd. Hisham Nordin 2 1Centre for Graduate Studies, Universiti Teknikal Malaysia Melaka,
Information Quality in Critical Infrastructures. Andrea Bondavalli.
 Information Quality in Critical Infrastructures Andrea Bondavalli andrea.bondavalli@unifi.it Department of Matematics and Informatics, University of Florence Firenze, Italy Hungarian Future Internet -
Information Quality in Critical Infrastructures Andrea Bondavalli andrea.bondavalli@unifi.it Department of Matematics and Informatics, University of Florence Firenze, Italy Hungarian Future Internet -
Design of a Modular Self-Reconfigurable Robot
 Design of a Modular Self-Reconfigurable Robot Pakpong Jantapremjit and David Austin Robotic Systems Laboratory Department of Systems Engineering, RSISE The Australian National University, Canberra, ACT
Design of a Modular Self-Reconfigurable Robot Pakpong Jantapremjit and David Austin Robotic Systems Laboratory Department of Systems Engineering, RSISE The Australian National University, Canberra, ACT
Biologically-inspired Autonomic Wireless Sensor Networks. Haoliang Wang 12/07/2015
 Biologically-inspired Autonomic Wireless Sensor Networks Haoliang Wang 12/07/2015 Wireless Sensor Networks A collection of tiny and relatively cheap sensor nodes Low cost for large scale deployment Limited
Biologically-inspired Autonomic Wireless Sensor Networks Haoliang Wang 12/07/2015 Wireless Sensor Networks A collection of tiny and relatively cheap sensor nodes Low cost for large scale deployment Limited
Mechatronics 19 (2009) Contents lists available at ScienceDirect. Mechatronics. journal homepage:
 Contents lists available at ScienceDirect. Mechatronics. journal homepage:") Mechatronics 19 (2009) 463 470 Contents lists available at ScienceDirect Mechatronics journal homepage: www.elsevier.com/locate/mechatronics A cooperative multi-robot architecture for moving a paralyzed
Mechatronics 19 (2009) 463 470 Contents lists available at ScienceDirect Mechatronics journal homepage: www.elsevier.com/locate/mechatronics A cooperative multi-robot architecture for moving a paralyzed
Probabilistic Modelling of a Bio-Inspired Collective Experiment with Real Robots
 Probabilistic Modelling of a Bio-Inspired Collective Experiment with Real Robots A. Martinoli, and F. Mondada Microcomputing Laboratory, Swiss Federal Institute of Technology IN-F Ecublens, CH- Lausanne
Probabilistic Modelling of a Bio-Inspired Collective Experiment with Real Robots A. Martinoli, and F. Mondada Microcomputing Laboratory, Swiss Federal Institute of Technology IN-F Ecublens, CH- Lausanne
Learning Reactive Neurocontrollers using Simulated Annealing for Mobile Robots
 Learning Reactive Neurocontrollers using Simulated Annealing for Mobile Robots Philippe Lucidarme, Alain Liégeois LIRMM, University Montpellier II, France, lucidarm@lirmm.fr Abstract This paper presents
Learning Reactive Neurocontrollers using Simulated Annealing for Mobile Robots Philippe Lucidarme, Alain Liégeois LIRMM, University Montpellier II, France, lucidarm@lirmm.fr Abstract This paper presents
In this article, we review the concept of a cellular robot that is capable
 Self-Reconfigurable Robots Shape-Changing Cellular Robots Can Exceed Conventional Robot Flexibility BY SATOSHI MURATA AND HARUHISA KUROKAWA EYEWIRE AND IMAGESTATE In this article, we review the concept
Self-Reconfigurable Robots Shape-Changing Cellular Robots Can Exceed Conventional Robot Flexibility BY SATOSHI MURATA AND HARUHISA KUROKAWA EYEWIRE AND IMAGESTATE In this article, we review the concept
Supporting the Design of Self- Organizing Ambient Intelligent Systems Through Agent-Based Simulation
 Supporting the Design of Self- Organizing Ambient Intelligent Systems Through Agent-Based Simulation Stefania Bandini, Andrea Bonomi, Giuseppe Vizzari Complex Systems and Artificial Intelligence research
Supporting the Design of Self- Organizing Ambient Intelligent Systems Through Agent-Based Simulation Stefania Bandini, Andrea Bonomi, Giuseppe Vizzari Complex Systems and Artificial Intelligence research
Self-Organised Task Allocation in a Group of Robots
 Self-Organised Task Allocation in a Group of Robots Thomas H. Labella, Marco Dorigo and Jean-Louis Deneubourg Technical Report No. TR/IRIDIA/2004-6 November 30, 2004 Published in R. Alami, editor, Proceedings
Self-Organised Task Allocation in a Group of Robots Thomas H. Labella, Marco Dorigo and Jean-Louis Deneubourg Technical Report No. TR/IRIDIA/2004-6 November 30, 2004 Published in R. Alami, editor, Proceedings
Paradigms, Models and Technologies for Building and Simulating Self-Organising Systems
 Paradigms, Models and Technologies for Building and Simulating Ing. Luca Gardelli DEIS - Department of Electronics, Computer Science & Systems ALMA MATER STUDIORUM Università di Bologna Via Venezia 52,
Paradigms, Models and Technologies for Building and Simulating Ing. Luca Gardelli DEIS - Department of Electronics, Computer Science & Systems ALMA MATER STUDIORUM Università di Bologna Via Venezia 52,
Robotics Modules with Realtime Adaptive Topology
 International Journal of Computer Information Systems and Industrial Management Applications ISSN 2150-7988 Volume 3 (2011) pp.185-192 MIR Labs, www.mirlabs.net/ijcisim/index.html Robotics Modules with
International Journal of Computer Information Systems and Industrial Management Applications ISSN 2150-7988 Volume 3 (2011) pp.185-192 MIR Labs, www.mirlabs.net/ijcisim/index.html Robotics Modules with
Towards an Engineering Science of Robot Foraging
 Towards an Engineering Science of Robot Foraging Alan FT Winfield Abstract Foraging is a benchmark problem in robotics - especially for distributed autonomous robotic systems. The systematic study of robot
Towards an Engineering Science of Robot Foraging Alan FT Winfield Abstract Foraging is a benchmark problem in robotics - especially for distributed autonomous robotic systems. The systematic study of robot
Control and Coordination in a Networked Robotic Platform
 University of Tennessee, Knoxville Trace: Tennessee Research and Creative Exchange Masters Theses Graduate School 5-2011 Control and Coordination in a Networked Robotic Platform Krishna Chaitanya Kalavacharla
University of Tennessee, Knoxville Trace: Tennessee Research and Creative Exchange Masters Theses Graduate School 5-2011 Control and Coordination in a Networked Robotic Platform Krishna Chaitanya Kalavacharla
Review Article Modular Self-Reconfigurable Robotic Systems: A Survey on Hardware Architectures
 Hindawi Journal of Robotics Volume 2017, Article ID 5013532, 19 pages https://doi.org/10.1155/2017/5013532 Review Article Modular Self-Reconfigurable Robotic Systems: A Survey on Hardware Architectures
Hindawi Journal of Robotics Volume 2017, Article ID 5013532, 19 pages https://doi.org/10.1155/2017/5013532 Review Article Modular Self-Reconfigurable Robotic Systems: A Survey on Hardware Architectures
Efficiency and Optimization of Explicit and Implicit Communication Schemes in Collaborative Robotics Experiments
 Efficiency and Optimization of Explicit and Implicit Communication Schemes in Collaborative Robotics Experiments Kjerstin I. Easton, Alcherio Martinoli Collective Robotics Group, California Institute of
Efficiency and Optimization of Explicit and Implicit Communication Schemes in Collaborative Robotics Experiments Kjerstin I. Easton, Alcherio Martinoli Collective Robotics Group, California Institute of
Shuffled Complex Evolution
 Shuffled Complex Evolution Shuffled Complex Evolution An Evolutionary algorithm That performs local and global search A solution evolves locally through a memetic evolution (Local search) This local search
Shuffled Complex Evolution Shuffled Complex Evolution An Evolutionary algorithm That performs local and global search A solution evolves locally through a memetic evolution (Local search) This local search
Cooperative navigation in robotic swarms
 1 Cooperative navigation in robotic swarms Frederick Ducatelle, Gianni A. Di Caro, Alexander Förster, Michael Bonani, Marco Dorigo, Stéphane Magnenat, Francesco Mondada, Rehan O Grady, Carlo Pinciroli,
1 Cooperative navigation in robotic swarms Frederick Ducatelle, Gianni A. Di Caro, Alexander Förster, Michael Bonani, Marco Dorigo, Stéphane Magnenat, Francesco Mondada, Rehan O Grady, Carlo Pinciroli,
Using Dynamic Capability Evaluation to Organize a Team of Cooperative, Autonomous Robots
 Using Dynamic Capability Evaluation to Organize a Team of Cooperative, Autonomous Robots Eric Matson Scott DeLoach Multi-agent and Cooperative Robotics Laboratory Department of Computing and Information
Using Dynamic Capability Evaluation to Organize a Team of Cooperative, Autonomous Robots Eric Matson Scott DeLoach Multi-agent and Cooperative Robotics Laboratory Department of Computing and Information
Expert Assessment of Stigmergy: A Report for the Department of National Defence
 Expert Assessment of Stigmergy: A Report for the Department of National Defence Contract No. File No. Client Reference No.: W7714-040899/003/SV 011 sv.w7714-040899 W7714-4-0899 Requisition No. W7714-040899
Expert Assessment of Stigmergy: A Report for the Department of National Defence Contract No. File No. Client Reference No.: W7714-040899/003/SV 011 sv.w7714-040899 W7714-4-0899 Requisition No. W7714-040899
Distributed Control of Multi-Robot Teams: Cooperative Baton Passing Task
 Appeared in Proceedings of the 4 th International Conference on Information Systems Analysis and Synthesis (ISAS 98), vol. 3, pages 89-94. Distributed Control of Multi- Teams: Cooperative Baton Passing
Appeared in Proceedings of the 4 th International Conference on Information Systems Analysis and Synthesis (ISAS 98), vol. 3, pages 89-94. Distributed Control of Multi- Teams: Cooperative Baton Passing
In vivo, in silico, in machina: ants and robots balance memory and communication to collectively exploit information
 In vivo, in silico, in machina: ants and robots balance memory and communication to collectively exploit information Melanie E. Moses, Kenneth Letendre, Joshua P. Hecker, Tatiana P. Flanagan Department
In vivo, in silico, in machina: ants and robots balance memory and communication to collectively exploit information Melanie E. Moses, Kenneth Letendre, Joshua P. Hecker, Tatiana P. Flanagan Department
Distributed Intelligent Systems W11 Machine-Learning Methods Applied to Distributed Robotic Systems
 Distributed Intelligent Systems W11 Machine-Learning Methods Applied to Distributed Robotic Systems 1 Outline Revisiting expensive optimization problems Additional experimental evidence Noise-resistant
Distributed Intelligent Systems W11 Machine-Learning Methods Applied to Distributed Robotic Systems 1 Outline Revisiting expensive optimization problems Additional experimental evidence Noise-resistant
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
From Communication to Traffic Self-Organization in VANETs
 From Communication to Traffic Self-Organization in VANETs Gianluigi Ferrari, 1 Stefano Busanelli, 1 Nicola Iotti 2 1 WASN Lab, Dept. of Information Eng., UniParma, Italy 2 Guglielmo Srl, Pilastro (Parma),
From Communication to Traffic Self-Organization in VANETs Gianluigi Ferrari, 1 Stefano Busanelli, 1 Nicola Iotti 2 1 WASN Lab, Dept. of Information Eng., UniParma, Italy 2 Guglielmo Srl, Pilastro (Parma),
Swarm-Bots to the Rescue
 Swarm-Bots to the Rescue Rehan O Grady 1, Carlo Pinciroli 1,RoderichGroß 2, Anders Lyhne Christensen 3, Francesco Mondada 2, Michael Bonani 2,andMarcoDorigo 1 1 IRIDIA, CoDE, Université Libre de Bruxelles,
Swarm-Bots to the Rescue Rehan O Grady 1, Carlo Pinciroli 1,RoderichGroß 2, Anders Lyhne Christensen 3, Francesco Mondada 2, Michael Bonani 2,andMarcoDorigo 1 1 IRIDIA, CoDE, Université Libre de Bruxelles,
Glossary of terms. Short explanation
 Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Development of PetRo: A Modular Robot for Pet-Like Applications
 Development of PetRo: A Modular Robot for Pet-Like Applications Ben Salem * Polywork Ltd., Sheffield Science Park, Cooper Buildings, Arundel Street, Sheffield, S1 2NS, England ABSTRACT We have designed
Development of PetRo: A Modular Robot for Pet-Like Applications Ben Salem * Polywork Ltd., Sheffield Science Park, Cooper Buildings, Arundel Street, Sheffield, S1 2NS, England ABSTRACT We have designed
Adaptive Control in Swarm Robotic Systems
 The Hilltop Review Volume 3 Issue 1 Fall Article 7 October 2009 Adaptive Control in Swarm Robotic Systems Hanyi Dai Western Michigan University Follow this and additional works at: http://scholarworks.wmich.edu/hilltopreview
The Hilltop Review Volume 3 Issue 1 Fall Article 7 October 2009 Adaptive Control in Swarm Robotic Systems Hanyi Dai Western Michigan University Follow this and additional works at: http://scholarworks.wmich.edu/hilltopreview
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists. International authors and editors
 We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,900 116,000 120M Open access books available International authors and editors Downloads Our
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,900 116,000 120M Open access books available International authors and editors Downloads Our
Robotic Systems ECE 401RB Fall 2007
 The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
Decentralized Approaches for Robot Fleet Control
 Workshop on AERIAL ROBOTICS - Onera Toulouse 2-3 October 2014 Decentralized Approaches for Robot Fleet Control INSA Lyon CITI-Inria Lab. - Dynamid team Olivier.Simonin@insa-lyon.fr Outline I. Decentralized
Workshop on AERIAL ROBOTICS - Onera Toulouse 2-3 October 2014 Decentralized Approaches for Robot Fleet Control INSA Lyon CITI-Inria Lab. - Dynamid team Olivier.Simonin@insa-lyon.fr Outline I. Decentralized
Portable Sensor Motes as a Distributed Communication Medium for Large Groups of Mobile Robots
 1 Portable Sensor Motes as a Distributed Communication Medium for Large Groups of Mobile Robots Sean Luke sean@cs.gmu.edu Katherine Russell krusselc@gmu.edu Department of Computer Science George Mason
1 Portable Sensor Motes as a Distributed Communication Medium for Large Groups of Mobile Robots Sean Luke sean@cs.gmu.edu Katherine Russell krusselc@gmu.edu Department of Computer Science George Mason
Ant Robotics. Terrain Coverage. Motivation. Overview
 Overview Ant Robotics Terrain Coverage Sven Koenig College of Computing Gegia Institute of Technology Overview: One-Time Repeated Coverage of Known Unknown Terrain with Single Ant Robots Teams of Ant Robots
Overview Ant Robotics Terrain Coverage Sven Koenig College of Computing Gegia Institute of Technology Overview: One-Time Repeated Coverage of Known Unknown Terrain with Single Ant Robots Teams of Ant Robots
Holland, Jane; Griffith, Josephine; O'Riordan, Colm.
 Provided by the author(s) and NUI Galway in accordance with publisher policies. Please cite the published version when available. Title An evolutionary approach to formation control with mobile robots
Provided by the author(s) and NUI Galway in accordance with publisher policies. Please cite the published version when available. Title An evolutionary approach to formation control with mobile robots
P15051: Robotic Eye for Eye Tracker
 P15051: Robotic Eye for Eye Tracker Andrew Drogalis Mechanical Engineer Tim O Hearn Mechanical Engineer Katie Hardy Daniel Webster Jorge Gonzalez Abstract: A robotic eye was constructed for the purpose
P15051: Robotic Eye for Eye Tracker Andrew Drogalis Mechanical Engineer Tim O Hearn Mechanical Engineer Katie Hardy Daniel Webster Jorge Gonzalez Abstract: A robotic eye was constructed for the purpose
Advances in insect brain/behavior simulation using HNN and robotics. Jim Zdunek. Insect Behavior. April 10, 2013
 Advances in insect brain/behavior simulation using HNN and robotics Jim Zdunek Insect Behavior April 10, 2013 ABSTRACT Genetic algorithms have been used to construct a neural model for insect path integration
Advances in insect brain/behavior simulation using HNN and robotics Jim Zdunek Insect Behavior April 10, 2013 ABSTRACT Genetic algorithms have been used to construct a neural model for insect path integration
On The Role of the Multi-Level and Multi- Scale Nature of Behaviour and Cognition
 On The Role of the Multi-Level and Multi- Scale Nature of Behaviour and Cognition Stefano Nolfi Laboratory of Autonomous Robotics and Artificial Life Institute of Cognitive Sciences and Technologies, CNR
On The Role of the Multi-Level and Multi- Scale Nature of Behaviour and Cognition Stefano Nolfi Laboratory of Autonomous Robotics and Artificial Life Institute of Cognitive Sciences and Technologies, CNR
Multiagent systems: Lessons from social insects and collective
 Multiagent systems: Lessons from social insects and collective robotics O.E.Holland Intelligent Autonomous Systems Laboratory Faculty of Engineering [Jniversity of the West of England Bristol BS16 1QY
Multiagent systems: Lessons from social insects and collective robotics O.E.Holland Intelligent Autonomous Systems Laboratory Faculty of Engineering [Jniversity of the West of England Bristol BS16 1QY
A Review of Probabilistic Macroscopic Models for Swarm Robotic Systems
 A Review of Probabilistic Macroscopic Models for Swarm Robotic Systems Kristina Lerman 1, Alcherio Martinoli 2, and Aram Galstyan 1 1 USC Information Sciences Institute, Marina del Rey CA 90292, USA, lermand@isi.edu,
A Review of Probabilistic Macroscopic Models for Swarm Robotic Systems Kristina Lerman 1, Alcherio Martinoli 2, and Aram Galstyan 1 1 USC Information Sciences Institute, Marina del Rey CA 90292, USA, lermand@isi.edu,
Interactive Surface for Bio-inspired Robotics, Re-examining Foraging Models
 Interactive Surface for Bio-inspired Robotics, Re-examining Foraging Models Olivier Simonin, Thomas Huraux, François Charpillet Université Henri Poincaré and INRIA Nancy Grand Est MAIA team, LORIA Laboratory
Interactive Surface for Bio-inspired Robotics, Re-examining Foraging Models Olivier Simonin, Thomas Huraux, François Charpillet Université Henri Poincaré and INRIA Nancy Grand Est MAIA team, LORIA Laboratory
Path Formation and Goal Search in Swarm Robotics
 Path Formation and Goal Search in Swarm Robotics by Shervin Nouyan Université Libre de Bruxelles, IRIDIA Avenue Franklin Roosevelt 50, CP 194/6, 1050 Brussels, Belgium SNouyan@ulb.ac.be Supervised by Marco
Path Formation and Goal Search in Swarm Robotics by Shervin Nouyan Université Libre de Bruxelles, IRIDIA Avenue Franklin Roosevelt 50, CP 194/6, 1050 Brussels, Belgium SNouyan@ulb.ac.be Supervised by Marco
Collective Construction Using Lego Robots
 Collective Construction Using Lego Robots Crystal Schuil 1, Matthew Valente 1, Justin Werfel 2, Radhika Nagpal 1 1 Harvard University, 33 Oxford Street, Cambridge, MA 02138 2 Massachusetts Institute of
Collective Construction Using Lego Robots Crystal Schuil 1, Matthew Valente 1, Justin Werfel 2, Radhika Nagpal 1 1 Harvard University, 33 Oxford Street, Cambridge, MA 02138 2 Massachusetts Institute of
Kilogrid: a Modular Virtualization Environment for the Kilobot Robot
 Kilogrid: a Modular Virtualization Environment for the Kilobot Robot Anthony Antoun 1, Gabriele Valentini 1, Etienne Hocquard 2, Bernát Wiandt 3, Vito Trianni 4 and Marco Dorigo 1 Abstract We introduce
Kilogrid: a Modular Virtualization Environment for the Kilobot Robot Anthony Antoun 1, Gabriele Valentini 1, Etienne Hocquard 2, Bernát Wiandt 3, Vito Trianni 4 and Marco Dorigo 1 Abstract We introduce
Swarm robotics in wireless distributed protocol design for coordinating robots involved in cooperative tasks
 Swarm robotics in wireless distributed protocol design for coordinating robots involved in cooperative tasks Floriano De Rango 1, Nunzia Palmieri 1, Xin-She Yang 2, Salvatore Marano 1 arxiv:1804.08096v1
Swarm robotics in wireless distributed protocol design for coordinating robots involved in cooperative tasks Floriano De Rango 1, Nunzia Palmieri 1, Xin-She Yang 2, Salvatore Marano 1 arxiv:1804.08096v1
Bio-inspired Computing for Robots and Music. Jim Tørresen Research group Robotics and Intelligent Systems
 Bio-inspired Computing for Robots and Music Jim Tørresen Research group Robotics and Intelligent Systems Robotics and Intelligent Systems group Systems operate in dynamic environments demanding adaptation
Bio-inspired Computing for Robots and Music Jim Tørresen Research group Robotics and Intelligent Systems Robotics and Intelligent Systems group Systems operate in dynamic environments demanding adaptation
Multi robot Team Formation for Distributed Area Coverage. Raj Dasgupta Computer Science Department University of Nebraska, Omaha
 Multi robot Team Formation for Distributed Area Coverage Raj Dasgupta Computer Science Department University of Nebraska, Omaha C MANTIC Lab Collaborative Multi AgeNt/Multi robot Technologies for Intelligent
Multi robot Team Formation for Distributed Area Coverage Raj Dasgupta Computer Science Department University of Nebraska, Omaha C MANTIC Lab Collaborative Multi AgeNt/Multi robot Technologies for Intelligent
E190Q Lecture 15 Autonomous Robot Navigation
 E190Q Lecture 15 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2014 1 Figures courtesy of Probabilistic Robotics (Thrun et. Al.) Control Structures Planning Based Control Prior Knowledge
E190Q Lecture 15 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2014 1 Figures courtesy of Probabilistic Robotics (Thrun et. Al.) Control Structures Planning Based Control Prior Knowledge
Instructors: Prof. Takashi Hiyama (TH) Prof. Hassan Bevrani (HB) Syafaruddin, D.Eng (S) Time: Wednesday,
 Prof. Hassan Bevrani (HB) Syafaruddin, D.Eng (S) Time: Wednesday,") Intelligent System Application to Power System Instructors: Prof. Takashi Hiyama (TH) Prof. Hassan Bevrani (HB) Syafaruddin, D.Eng (S) Time: Wednesday, 10.20-11.50 Venue: Room 208 Intelligent System Application
Intelligent System Application to Power System Instructors: Prof. Takashi Hiyama (TH) Prof. Hassan Bevrani (HB) Syafaruddin, D.Eng (S) Time: Wednesday, 10.20-11.50 Venue: Room 208 Intelligent System Application
Smart systems, the fourth industrial revolution and new challenges in distributed computing
 Smart systems, the fourth industrial revolution and new challenges in distributed computing Didier EL BAZ 1 and Li ZHU LAAS-CNRS, Université de Toulouse, CNRS Toulouse, France Abstract. Smart systems and
Smart systems, the fourth industrial revolution and new challenges in distributed computing Didier EL BAZ 1 and Li ZHU LAAS-CNRS, Université de Toulouse, CNRS Toulouse, France Abstract. Smart systems and
Evolutionary Modular Robotics: Survey and Analysis
 Journal of Intelligent & Robotic Systems https://doi.org/10.1007/s10846-018-0902-9 Evolutionary Modular Robotics: Survey and Analysis Reem J. Alattas 1 Sarosh Patel 1 Tarek M. Sobh 1 Received: 2 October
Journal of Intelligent & Robotic Systems https://doi.org/10.1007/s10846-018-0902-9 Evolutionary Modular Robotics: Survey and Analysis Reem J. Alattas 1 Sarosh Patel 1 Tarek M. Sobh 1 Received: 2 October
A Macroscopic Analytical Model of Collaboration in Distributed Robotic Systems
 A Macroscopic Analytical Model of Collaboration in Distributed Robotic Systems Abstract In this article, we present a macroscopic analytical model of collaboration in a group of reactive robots. The model
A Macroscopic Analytical Model of Collaboration in Distributed Robotic Systems Abstract In this article, we present a macroscopic analytical model of collaboration in a group of reactive robots. The model