First responder positioning
|
|
|
- Alexandra Warner
- 5 years ago
- Views:
Transcription


1 First responder positioning systems Overview of user needs and technologies Jouni Rantakokko
2 Outline Introduction - First responder localization in urban operations First responder needs and requirements - Overview of user needs and preliminary requirements Enabling technologies -GPS - Supporting sensors in GPS-challenged environments Summary
3 Outline Introduction - First responder localization in urban operations First responder needs and requirements - Overview of user needs and requirements discussion Enabling technologies -GPS - Supporting sensors in GPS-challenged environments Summary
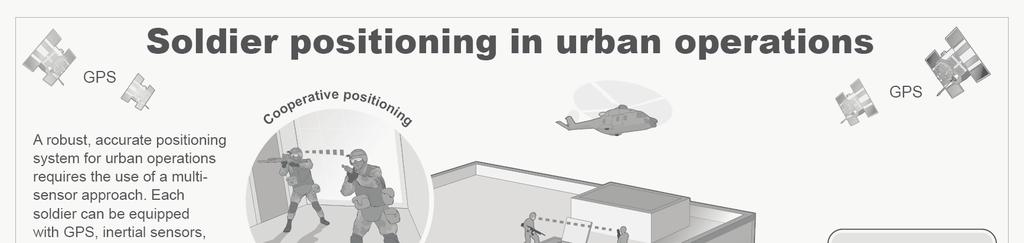
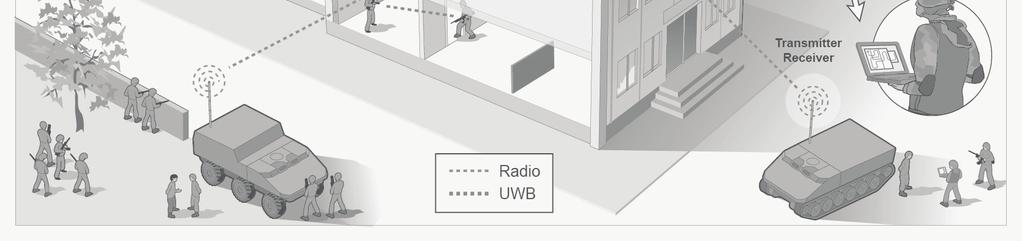
4 Positioning in urban environments Positioning of vehicles is feasible - GPS-receivers, inertial sensors, vehicles own sensors (e.g. velocity, wheel turn), map matching, Positioning of civilians is feasible - Possibilities Sensors: GPS, inertial sensors, magnetometers, barometer, camera, etc Pre-installed systems: WLAN, RFID, UWB, acoustic, etc - Combination of sensors and map (building floor plans), pre-installed systems and/or user feedback solves the problem although perhaps (not yet) at the desired cost?
 available Stringent size, weight, power and cost requirements Level of automation (no user interaction)")
5 Positioning in urban environments First responder positioning in urban environments - High accuracy, availability and reliability requirements - General limitations No pre-installation possible Building floor-plans are not (yet) available Stringent size, weight, power and cost requirements Level of automation (no user interaction) Source: WPI
 C/A-signal - Position accuracy")

6 FR positioning what is available? GPS-receivers - Civil Standard Positioning Service (SPS) C/A-signal - Position accuracy between 1-5 m during favorable conditions - Indoor position error may be up to 50 m, or more Difficulties - Radio signal propagation in urban environments - Sensitivity towards jamming - Lack of reliable performance metrics in urban and indoor environments

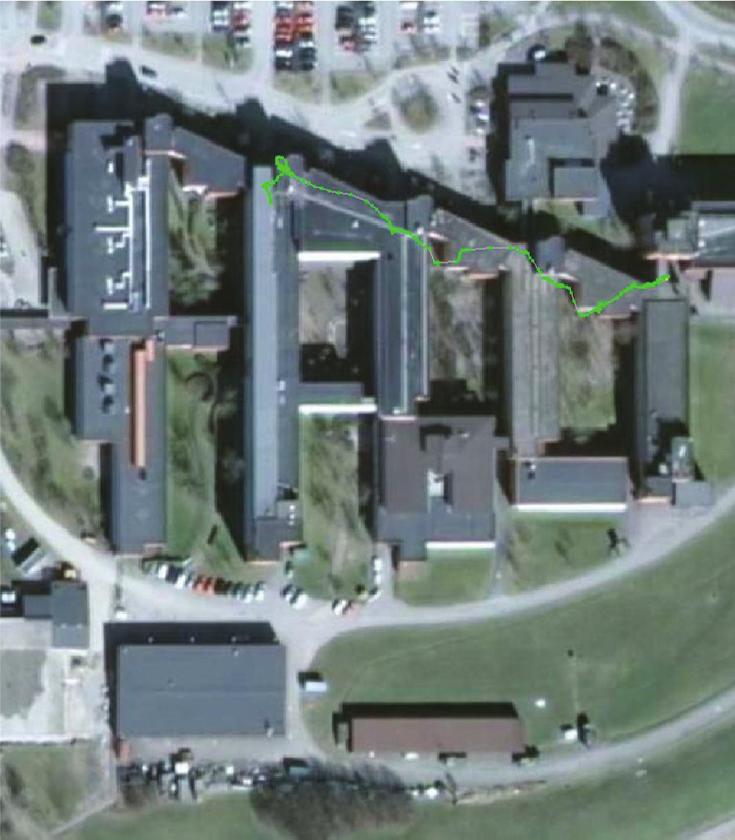
7 Indoor HS-GPS example
 -")



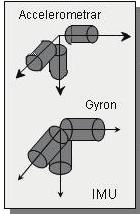
8 FR positioning what is available? Back-mounted PDR-type systems (+ GPS) - Three-axis accelerometers, gyros, magnetometers and a barometer - Data sheets state the following Weight <150 grams, power consumption W Position error horizontal: 1-2% of distance - Position error vertical : < 1.5m - Looks OK on paper the truth, the whole truth, and nothing but the truth? DRM4000 NaviSeer S-NAV
9 FR positioning what is available? Principle of operation - Detect a step, estimate step length, estimate step direction Why do they not behave as promised? - Step detection thresholds varies, e.g. Sneaking versus running Concrete versus sand (or mud) - Step length varies Outdoors vs. indoors, walking up or down a slope/stairs, fatigue, situation dependent - Step direction Systems assume first responder moves forward (in direction of IMU orientation), but realistic movement patterns include sidestepping, walking backwards, crawling Magnetic field disturbances in urban and indoor environments - Height estimation with barometer alone Sensitivity towards weather changes, muzzle blasts, explosions, fires (heat causes air turbulence), building pressurization
10 FR positioning what is available? Principle of operation - Detect a step, estimate step length, estimate step direction Why do they not behave as promised? - Step detection thresholds varies, e.g. Sneaking versus running Concrete versus sand (or mud) - Step length varies Outdoors vs. indoors, walking up or down a slope/stairs, fatigue, situation dependent - Step direction Systems assume first responder moves forward (in direction of IMU orientation), but realistic movement patterns include sidestepping, walking backwards, crawling Magnetic field disturbances in urban and indoor environments - Height estimation with barometer alone Sensitivity towards weather changes, muzzle blasts, explosions, fires (heat causes air turbulence), building pressurization





11 FR positioning desired capability? Positioning of first responders in all environments and for all realistic movements - Give the first responder the same functionality regardless of scenario in urban and indoor environments as well as during GPS-jamming
12 Outline Introduction - First responder localization in urban operations First responder needs and requirements - Overview of user needs and preliminary requirements Enabling technologies -GPS - Supporting sensors in GPS-challenged environments Summary
13 User needs Current advances in localization and tracking technology have the potential to develop into muchneeded tools for the saving of lives in emergency response and rescue missions, and for the safekeeping of lives in military operations The requirements of firefighters, law enforcement officers and soldiers are very stringent - positioning accuracy - robustness - Reliability/availability - weight and size of the system J. Rantakokko, P. Händel, M. Fredholm, F. Eklöf,, User Requirements for Localization and Tracking Technology - A Survey of Mission-specific Needs and Constraints, Proc. of IPIN, Zurich, Switzerland, September 2010.
14


15 Source: Räddningsverket
16 User needs The primary use of a positioning system - Command and control (C2) system for the mission, normally led locally in close proximity to the operation. This enables e.g. efficient command and control of the operation personnel accountability fast extraction of wounded or lost firefighters from inside buildings The positions will first be needed by the incident commanders (IC) of the operation, then, as a secondary requirement, by the actual units participating in the operation
17 User needs Efficient local command and control M, P, F Rescue of injured personnel M, P, F Navigation through complex buildings M, P, F Safe exit (e.g. from collapsing building) F Friendly-fire / Blue-force-tracking M, (P) Distance and heading to targets/threats M, P Health status and automatic alarm functionality M, P, F Know what rooms have been cleared (searched) M, P, (F) After-action review (de-briefing) and training analysis M, (P), F Fugitive movement pattern analysis (positions of dogs) P Free the radio resource for command and control M, P, F
 - Height - Position error (and integrity monitoring) - Heading for weapon and/or body - Distance and direction to")
18 User needs What needs to be estimated? - Position (x,y) - Height - Position error (and integrity monitoring) - Heading for weapon and/or body - Distance and direction to targets and threats Who needs the estimated positions? - Local command - Other units in group x x y y z z
19 User needs Additional user needs - personal alarm functionality - self-navigation aid Military and law enforcement personnel also need a means of reducing friendly-fire casualties and a robust and accurate target designation - need for robust, accurate (weapon) heading estimation
20 Requirements discussion What is desired of a first responder positioning system? - Seamless outdoor-indoor coverage, with consistent performance in all relevant scenarios - No dependence on pre-installed infrastructure - Robust and reliable - Light-weight, small, power efficient, low-cost (SWaP-C) - Reliable estimation of room and floor (or equivalent) - Error estimates (integrity monitoring) automatic estimation of localization errors (uncertainty) detection and warning in case of electronic attack or unintentional electromagnetic interference
21 Requirements discussion Requirement estimates ~ 1-3 m accuracy ~ near 100% availability (in all environments) ~ << 1 kg, incl. processing unit and visualization ~ 8 24 h battery (up to 72 h for some applications) > 30 min s in GPS-denied/challenged environments (e.g. indoors) but they also depend heavily on user group, type of operation, and usage (e.g. avoid friendly fire or efficient C2),
22 Requirements discussion In order to achieve a high market penetration the price of the complete positioning system should be below cost of each sub-sensor must by necessity be kept low
23 Requirements discussion Constant and secure accessibility for those who need the positioning data (IC and team members) - Encrypted voice communications and data transfer Physical robustness so that the system will operate reliably even under harsh conditions, including extreme temperatures and humidity Antenna and cables should be incorporated into the individual s uniform
24 Requirements discussion Real-time map-building capability in the form of simultaneous localization and mapping (SLAM) approaches in unknown buildings as the team moves through it - SLAM should be automatic, without the need for the team members to aim cameras or other sensors in various directions
25 Requirements discussion Positioning data combined with e.g. personal health status sensor data (physiological monitoring)
26 Requirements discussion Presentation of positioning data to be intuitive and easy to understand, in particular for the personnel actually carrying out the operation - In armed operations, visualization system should present heading to own troops and in particular the heading of the weapon - Data for distance and direction to targets and threats should also be presented
27 The role of communications A robust communications system for both voice and digital data flow forms the backbone of any localization system - Most discussed user needs involves the distribution of positions Voice communications should be reserved for leading the operation, while positioning details can be transmitted as digital data C2-component of the operations team would often find its work facilitated by the ability to rapidly download critical information on the target location through its wireless communications network - for instance construction plans, data from heat and smoke detectors, and CCTV images in case of a firefighting operation
28 Diverse operational environments The operational environments encountered will be very diverse - Firefighter example fire-suppression in a wooden two-story family home commercial concrete multi-story buildings with tens of thousands of square-metres Users will have different stringent requirements, as well as different trade-offs (e.g. cost versus accuracy) - Compare e.g. police officers assigned to traffic duty when compared to the needs of special weapons and tactics (SWAT) operators - Same reasoning applies for soldiers performing patrol duty in rural areas with only small buildings when compared to building-clearing operations (Sarajevo sniper-alley )
29 Diverse operational environments Modular system is desired - user may face different challenges on different missions and occasionally have no real need for positioning data - soldiers and law enforcement officers tends to prefer a modular system, while firefighters instead expect always to carry the whole/same system
30 Scenarios Range of op s in which localization and tracking capability would provide an edge is wide User type Military Law enforcement Firefighting Civilian users Operations Urban combat Building clearing Ship boarding Safe navigation Hostage rescue Ship boarding Crowd control Residential and apartment building fires Complex building fires Ship fires Forest fires Subterranean Rescue Operations Detention facilities Private security guards Protection of sensitive facilities and transportation of hazardous materials Protection of civil servants Emergency response operations during humanitarian missions in crisis areas Localization of the elderly and children
31 Situational Awareness (SA) The notion of situational awareness systems for soldiers is a broad area, but some of the important questions it could answer for the soldier are - Where am I? - Where are my comrades? - Where is the enemy? - What is my current task? - Where am I supposed to be? - How do I get there, quickly and safely? - Is it safe to shoot in this direction, or blow out this wall/door? - Are my comrades OK?

32 Military operations It is noteworthy that these functions can to a large extent be performed through voice communication - Robust voice communications is the number one priority - It can be difficult and require much attention for team leaders to keep track of the positions and update team members on the situation constantly
33 Military Urban operations Urban warfare operations, in particular in a counterinsurgency context, pose particular challenges - Difficult to distinguish between civilians and enemy fighters, since the latter hide among the former and use civilians as cover or even as living shields - Distances tend to be short - tactical situation can and will change very rapidly - Difficult to achieve a good situational awareness (SA) without technological aids - Buildings will need to be secured and searched for enemy fighters, arms caches, or contraband - Enemy snipers may hamper operations - The layout of buildings is usually unknown before the soldiers enter them
34 Military Urban operations Key use of a localization and tracking system will be to enable the commander in charge of the operation to lead efficiently Integrity monitoring is of crucial importance in military operations, - especially if incorporating civilian GNSS-receivers into the system - reliable estimate of localization error perhaps more important than a high localization accuracy Size, weight automation and power (SWaP) requirements are extremely important Due to the large variety of operational scenarios, a modular system is desired Weapon heading estimation is desired
35 Firefighting operations An automatic accountability system that would give the incident commander information about firefighters that are lost or starts to behave erratically (e.g. move away from the other firefighters and/or the fire hose) is highly desired - The situation where a firefighter is lost at the fire ground causes multiple casualties each year in the US alone. Rapid insertion teams (RIT) are then sent in to find and extract the firefighter and the ability to quickly and decisively guide them to the firefighter in need would save lives.
36 Firefighting operations In many countries the tactics today is that the incident commander gives out orders and directs the firefighters over radio - Information about positions of all firefighters should be relayed to the incident commander Our view is that also individual firefighters should receive SA information - radio coverage problems occur - distance measurements between RIT-team and missing firefighter should increase speed of rescue Delicate task to decide upon how the information should be visualized to a firefighter during the extremely stressful and physically exhausting situations that commonly occur
37 Firefighting operations Physiological monitoring, with an automatic alarm function, and also real-time map-making (SLAM) capability will be of great importance for firefighters - Searches of rooms performed by a RIT can be very slow due to the limited visibility floor-plans would increase speed of search as well as accuracy of position estimates - The use of thermal imaging cameras significantly helps speed up a search
38 Firefighting operations Data need to be made available to the incident commander as well as to any reinforcements or medical evacuation teams entering the premises During larger fires reinforcements from other departments occur and the person designated as being the incident commander may change several times during the incident - An automatic situation awareness system is very valuable Incident commander usually sits in a vehicle and leads the operation - More information can then potentially be visualized to the fire fighting incident commander, and larger visualization interfaces can be used - The question remains what situational awareness information should be automatically conveyed to the firefighters
39 Additional civilian applications Correction officers and other staff at detention facilities often experience threats and violence from inmates - A personal attack alarm function which upon activation would transmit position and an alarm message to the command center would be an extra safeguard, as would the transmission of health status data Pre-installed positioning system in combination with building floor plans could be used, for instance during prison riot - combined with mobile/autonomous back-up system to ensure operations under severe conditions
40 Additional civilian applications Private security guards often work alone, and a localization and tracking system could serve as a means to increase their physical security - The key benefit of having an localization and tracking system for security guards would be constant access to the physical location of the security guard and possibly his health status (personal alarm / accountability system)
41 Additional civilian applications Protection of sensitive facilities such as nuclear power plants, oil refineries, and chemical industries - Enhance the ability to defend and protect against attacks - Facilitate the evacuation of its staff in case of serious emergencies - Enable the personnel and emergency responders to keep track of hazardous material on the premises In installations of this kind - pre-installed positioning systems can be employed to great effect - building layouts should be available and they provide an efficient means of improving indoor localization accuracy when using dead-reckoning techniques - in case of emergency, it would be advantageous if the data can also be linked straight to the emergency response team
 - Alarm functionality (hospitals - social workers -")
42 Different users different systems Safety-of-Life critical systems - Special forces, local/state/federal SWAT-teams, firefighters - Accuracy and availability before cost Increased safety - Soldiers, police, correction officers, security guards - Availability, accuracy and cost important Demanding consumers/applications (and first adopters ) - Alarm functionality (hospitals - social workers - immigration), interactive services, gaming, surveillance of visitors in companies, - Availability and cost important, errors accepted Regular consumers (mass market) - Positioning of emergency calls, games, interactive services, - Cost most important (e.g. when integrating pos/nav in all mobile phones)
43 Concluding remarks Military personnel in peace-keeping and peaceenforcement operations, law enforcement officers, and firefighters face very similar needs, despite their differences in operational scenarios - It makes sense to develop localization and tracking technologies that will serve not only one but several of these end-user groups


44 Concluding remarks Training facility needed for development of requirements and evaluation of existing and emerging localization and tracking systems Total station UWB-tag - Perform tests in cooperation with end-users Prisma - Pre-installed high-accuracy system against which new stand-alone technologies can be evaluated - Research on human-machine-interface possible the question of what information should be conveyed to the individual soldier or firefighter, and how it should be presented, is a non-trivial task that requires significant attention
45 Outline Introduction - First responder localization in urban operations First responder needs and requirements - Overview of user needs and preliminary requirements Enabling technologies -GPS - Supporting sensors in GPS-challenged environments Summary
46 Robust multisensor positioning GPS GPS Accelerometers Accelerometers Gyro Gyro Magnetometers Magnetometers Barometric Barometric altimeter altimeter Individual sensors - GPS - IMU (foot- or back-mounted) - Magnetometer - Baro-altimeter - Other possibilities include Doppler-radar, cameras, laser, ultrasound,
47 GNSS OK, lots of improvements going on but what will this actually give me? - An advanced integrated GPS/Galileo receiver will have access to 50+ satellites, with multiple signals at different frequencies from each satellite -This will improve accuracy in urban (no more urban canyon problems, at least for vehicles) and forest areas improve availability indoors, and reduce position errors improve robustness towards interference/jamming - This will not give meter-level accuracies in deep indoor scenarios
48 PDR-type systems Improved Pedestrian Dead-reckoning systems expected this year - Improved motion classification - Improved sensors - But it is unlikely they will be sufficiently robust towards realistic movements
49 Foot-mounted INS
50 Foot-mounted INS Sensors -MEMS-based Small, lightweight Power efficient Low cost Principle of operation - Inertial navigation - Foot-mounting allows for regular zero-velocity updates Challenges - Initialization of position and orientation - Reliable estimation of when foot is at stand-still during all realistic types of motion - Crawling



51 Foot-mounted INS
52 Magnetometer A magnetometer measures the magnetic field intensity - Small, inexpensive three-axis magnetometers available Large-scale earth magnetic field is known at different positions - Data from three-axis magnetometer can yield estimates of attitude, acts as electrical compass Challenges - Metallic objects, electrical equipment can yield large local fluctuations in magnetic field intensity - Fast variations can be expected in many indoor environments, but mean value during movement is close to earths magnetic field - Challenge is to remove as much as possible from these (mostly) short-term noise sources, and extract the measurements of the global magnetic field Complement to gyros
53 Barometric altimeter Measures air pressure - Small, inexpensive barometers available Air pressure varies with altitude - Barometers can be used to estimate altitude variations Challenges - Air pressure varies with weather, wind conditions, and temperature - In indoor environments air conditioning, open windows, fires, and deliberate pressurization of buildings to remove smoke causes pressure variations - Challenge is to detect these false readings and exclude them Useful for measurements of short-term variations of air pressure, long-term errors expected if not aided by other sensors Complements INS and GPS for altitude estimation
54 Barometric altimeter Example: shooting indoors in small room with sensor placed on floor - Pressure difference mbar ( Pa) - Corresponds to height reduction of 18 m
55 Ultrasonic sensors An ultrasonic sensor can measure distance to objects, or between sensors - Small, inexpensive, directive ultra-sound sensors available Short-range distance measurement equipment - By combining ultrasonic sensors and IMU s on each foot improved performance is expected - Distance to walls can aid cameras in SLAM - Noise robustness in firefighter scenarios?
56 RF-ranging Size and weight considerations may prohibit use of separate radio system for ranging - Design combined data transfer and ranging radio system (separate waveforms in SDR) Portable infrastructure systems (e.g. radios on fire trucks) - Accurate in many scenarios, but deployment possibilities can be restricted and high-rise buildings problematic Firefighter-to-firefighter ranging - Ranging accuracy must be improved for heavy multipath scenarios, with limited bandwidth systems Pre-deployed radio-ranging infrastructure - If we can assume availability of accurate maps, then RFID-type equipment may also be feasible, e.g. inexpensive, small, shortrange transmitters/receivers could be deployed during building construction - Will not be present in all buildings, may require costly deployment or calibration
57 UWB (TimeDomain P220) Very accurate range estimation (~dm) Short range (expect few tens of meters indoors) Accurate ranging allows for cooperation Description Minimum range (depends upon parameter settings) Outdoors, limited multipath > 70m LOS Indoors, heavy multipath >50m Plaster wall with wooden framing 12-15m (<5 walls) Non- LOS Reinforced concrete wall Modern family dwelling, 2-story < 10m (<3 walls) > 15m (up to 3 walls/floors) Modern 3-glass window (metal coated energy-saving) ~10m
58 Maps If current, accurate, trustworthy building layout info is available the position accuracy can be dramatically improved - Particle filters seems promising for fusion of IMU and map Localization aid, and map-building capability Challenges - Future availability unknown, may require legislative actions specifying building info to be submitted to authorities - High map accuracy required - Interior building destruction may occur during catastrophic events Complements INS efficiently Movement models could further improve performance if we knew how the firefighter does not move
59 Imaging sensors A camera can estimate bearing to different landmarks in the environment - Small, inexpensive cameras available Localization aid, and map-building capability Challenges - Computational complexity, environment, dynamics, range Complements INS for attitude estimation Alternative to using maps
60 Simultaneous localization and mapping - SLAM SLAM principle - build a map and localize yourself in an unknown environment If we knew - our trajectory, we could easily create a map - the map, we could easily determine our location - Both map and trajectory are, in many scenarios, unknown!
 not stationary?")
61 Camera-aided inertial navigation - difficulties Low visibility scenarios - Due to darkness, smoke, fog, Is it possible to use e.g. thermal IR cameras (or night-vision sensors)? - Fewer distinct landmarks available? - Heat sources (and reflections) not stationary? Computational complexity - Need efficient landmark selection algorithms Dynamic environments
62 Remaining challenges Automatic initialization of position and orientation - In situations without accurate GPS-receivers and with magnetic disturbances, for instance when leaving vehicle in urban environment The key challenge is perhaps to have a good instant knowledge of how reliable the sensor data is - Robust sensor fusion through sub-system integrity Cooperative navigation for increased accuracy and availability - What information is efficient to exchange? WBAN - Robust, secure transfer of data to processing unit and radio What information should be presented to the First responder and Incident commander, and how should it be presented? - How will the FR and IC use the information during tough operations, such as large scale structural fires
 GPS & PDR Foot-mounted INS INS & imaging sensors 2012 2013 2014 2015 2016 PDR++ PDR")
63 Technology roadmap a quick glance Existing systems unsatisfactory in urban operations -GPS -PDR-type system First responder positioning in urban environments soon feasible - Expect less than 1-2 meter error increase per minute for realistic movements with foot-mounted INS Technology maturity time-line (draft) GPS & PDR Foot-mounted INS INS & imaging sensors PDR++ PDR & Doppler
64 Outline Introduction - First responder localization in urban operations First responder needs and requirements - Overview of user needs and preliminary requirements Enabling technologies -GPS - Supporting sensors in GPS-challenged environments Summary
65 Summary First responder localization - Reliable and accurate positioning systems are highly needed they will save the lives of fire fighters and other first responders
66 Summary Multi-sensor system is required, composed of e.g. - GNSS-receivers GPS + Galileo + GLONASS(?) Different services and signals from all SatNav systems are available - Inertial sensors, magnetometers and barometer Foot-mounted, back-mounted and/or co-located with imaging sensors - Imaging sensors - Doppler radar - Ranging devices (RF, acoustic, ) - Cooperative navigation HW - focus on inexpensive and lightweight sensors, e.g. MEMS-based SW - quality of multi-sensor fusion algorithms and integrity monitoring of positioning sub-systems dictates performance
67 Summary - Positioning in GNSSchallenged environments Position error based on individual sensor set will inevitably increase with time/movement Ranging between first responders and cooperation reduces error drift but we still need regular recalibration of positions Possibilities Radio-based ranging to anchor nodes Building floor-plans Satellite imagery and ranging to recognizable objects, image data base matching, Cooperative navigation between first responders slow down rate of error increase






68 - Impulse radio (UWB) for ranging and exchange of information? - What sensor data should be exchanged to enhance efficiency of cooperation? Cooperative navigation for high accuracy during long-term operations J. Rantakokko et al, Accurate and reliable soldier and first responder indoor positioning: Multi-sensor systems and cooperative localization, IEEE Wireless Communications Magazine, April 2011 First responder equipped with individual sensors for position estimation Accelerometers Accelerometers Gyro Gyro Magnetometers Magnetometers Barometric Barometricaltimeter altimeter GPS GPS IR-Camera IR-Camera IMU IMU Possible future concept for robust first responder positioning systems in urban operations



69
First responder positioning systems
 First responder positioning systems Overview of user needs and technologies Jouni Rantakokko Outline Introduction - First responder localization in urban operations First responder needs and requirements
First responder positioning systems Overview of user needs and technologies Jouni Rantakokko Outline Introduction - First responder localization in urban operations First responder needs and requirements
Cooperative navigation (part II)
") Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative localization (part I) Jouni Rantakokko
 Jouni Rantakokko") Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Working towards scenario-based evaluations of first responder positioning systems
 Working towards scenario-based evaluations of first responder positioning systems Jouni Rantakokko, Peter Händel, Joakim Rydell, Erika Emilsson Swedish Defence Research Agency, FOI Royal Institute of Technology,
Working towards scenario-based evaluations of first responder positioning systems Jouni Rantakokko, Peter Händel, Joakim Rydell, Erika Emilsson Swedish Defence Research Agency, FOI Royal Institute of Technology,
Fire Fighter Location Tracking & Status Monitoring Performance Requirements
 Fire Fighter Location Tracking & Status Monitoring Performance Requirements John A. Orr and David Cyganski orr@wpi.edu, cyganski@wpi.edu Electrical and Computer Engineering Department Worcester Polytechnic
Fire Fighter Location Tracking & Status Monitoring Performance Requirements John A. Orr and David Cyganski orr@wpi.edu, cyganski@wpi.edu Electrical and Computer Engineering Department Worcester Polytechnic
NavShoe Pedestrian Inertial Navigation Technology Brief
 NavShoe Pedestrian Inertial Navigation Technology Brief Eric Foxlin Aug. 8, 2006 WPI Workshop on Precision Indoor Personnel Location and Tracking for Emergency Responders The Problem GPS doesn t work indoors
NavShoe Pedestrian Inertial Navigation Technology Brief Eric Foxlin Aug. 8, 2006 WPI Workshop on Precision Indoor Personnel Location and Tracking for Emergency Responders The Problem GPS doesn t work indoors
Measurement report. Laser total station campaign in KTH R1 for Ubisense system accuracy evaluation.
 Measurement report. Laser total station campaign in KTH R1 for Ubisense system accuracy evaluation. 1 Alessio De Angelis, Peter Händel, Jouni Rantakokko ACCESS Linnaeus Centre, Signal Processing Lab, KTH
Measurement report. Laser total station campaign in KTH R1 for Ubisense system accuracy evaluation. 1 Alessio De Angelis, Peter Händel, Jouni Rantakokko ACCESS Linnaeus Centre, Signal Processing Lab, KTH
Honeywell GLANSER Emergency Responder Locator System. WPI Workshop August 1, 2011
 Honeywell GLANSER Emergency Responder Locator System WPI Workshop August 1, 2011 Acknowledgments The GLANSER program is being supported by funding from the Department of Homeland Security; Science and
Honeywell GLANSER Emergency Responder Locator System WPI Workshop August 1, 2011 Acknowledgments The GLANSER program is being supported by funding from the Department of Homeland Security; Science and
WOLF - Wireless robust Link for urban Forces operations
 Executive summary - rev B - 01/05/2011 WOLF - Wireless robust Link for urban Forces operations The WOLF project, funded under the 2nd call for proposals of Joint Investment Program on Force Protection
Executive summary - rev B - 01/05/2011 WOLF - Wireless robust Link for urban Forces operations The WOLF project, funded under the 2nd call for proposals of Joint Investment Program on Force Protection
Improved Pedestrian Navigation Based on Drift-Reduced NavChip MEMS IMU
 Improved Pedestrian Navigation Based on Drift-Reduced NavChip MEMS IMU Eric Foxlin Aug. 3, 2009 WPI Workshop on Precision Indoor Personnel Location and Tracking for Emergency Responders Outline Summary
Improved Pedestrian Navigation Based on Drift-Reduced NavChip MEMS IMU Eric Foxlin Aug. 3, 2009 WPI Workshop on Precision Indoor Personnel Location and Tracking for Emergency Responders Outline Summary
Sensing and Perception: Localization and positioning. by Isaac Skog
 Sensing and Perception: Localization and positioning by Isaac Skog Outline Basic information sources and performance measurements. Motion and positioning sensors. Positioning and motion tracking technologies.
Sensing and Perception: Localization and positioning by Isaac Skog Outline Basic information sources and performance measurements. Motion and positioning sensors. Positioning and motion tracking technologies.
Cooperative navigation: outline
 Positioning and Navigation in GPS-challenged Environments: Cooperative Navigation Concept Dorota A Grejner-Brzezinska, Charles K Toth, Jong-Ki Lee and Xiankun Wang Satellite Positioning and Inertial Navigation
Positioning and Navigation in GPS-challenged Environments: Cooperative Navigation Concept Dorota A Grejner-Brzezinska, Charles K Toth, Jong-Ki Lee and Xiankun Wang Satellite Positioning and Inertial Navigation
Technology Challenges and Opportunities in Indoor Location. Doug Rowitch, Qualcomm, San Diego
 PAGE 1 qctconnect.com Technology Challenges and Opportunities in Indoor Location Doug Rowitch, Qualcomm, San Diego 2 nd Invitational Workshop on Opportunistic RF Localization for Future Directions, Technologies,
PAGE 1 qctconnect.com Technology Challenges and Opportunities in Indoor Location Doug Rowitch, Qualcomm, San Diego 2 nd Invitational Workshop on Opportunistic RF Localization for Future Directions, Technologies,
Robust Positioning for Urban Traffic
 Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
WPI PPL System Development Updates & Overview of the results from the August 2008 WPI PIPILTER Workshop
 WPI PPL System Development Updates & Overview of the results from the August 2008 WPI PIPILTER Workshop David Cyganski, James Duckworth Electrical and Computer Engineering Department Worcester Polytechnic
WPI PPL System Development Updates & Overview of the results from the August 2008 WPI PIPILTER Workshop David Cyganski, James Duckworth Electrical and Computer Engineering Department Worcester Polytechnic
Indoor navigation with smartphones
 Indoor navigation with smartphones REinEU2016 Conference September 22 2016 PAVEL DAVIDSON Outline Indoor navigation system for smartphone: goals and requirements WiFi based positioning Application of BLE
Indoor navigation with smartphones REinEU2016 Conference September 22 2016 PAVEL DAVIDSON Outline Indoor navigation system for smartphone: goals and requirements WiFi based positioning Application of BLE
Overview of Need and Current Status of LPS for Emergency Response
 Precision Indoor Personnel Location and Tracking for Emergency Responders Workshop Overview of Need and Current Status of LPS for Emergency Response Krzysztof Kolodziej Author & Consultant IndoorLBS.com
Precision Indoor Personnel Location and Tracking for Emergency Responders Workshop Overview of Need and Current Status of LPS for Emergency Response Krzysztof Kolodziej Author & Consultant IndoorLBS.com
Jim Kaba, Shunguang Wu, Siun-Chuon Mau, Tao Zhao Sarnoff Corporation Briefed By: Jim Kaba (609)
") Collaborative Effects of Distributed Multimodal Sensor Fusion for First Responder Navigation Jim Kaba, Shunguang Wu, Siun-Chuon Mau, Tao Zhao Sarnoff Corporation Briefed By: Jim Kaba (69) 734-2246 jkaba@sarnoff.com
Collaborative Effects of Distributed Multimodal Sensor Fusion for First Responder Navigation Jim Kaba, Shunguang Wu, Siun-Chuon Mau, Tao Zhao Sarnoff Corporation Briefed By: Jim Kaba (69) 734-2246 jkaba@sarnoff.com
LOCALIZATION WITH GPS UNAVAILABLE
 LOCALIZATION WITH GPS UNAVAILABLE ARES SWIEE MEETING - ROME, SEPT. 26 2014 TOR VERGATA UNIVERSITY Summary Introduction Technology State of art Application Scenarios vs. Technology Advanced Research in
LOCALIZATION WITH GPS UNAVAILABLE ARES SWIEE MEETING - ROME, SEPT. 26 2014 TOR VERGATA UNIVERSITY Summary Introduction Technology State of art Application Scenarios vs. Technology Advanced Research in
Near-Field Electromagnetic Ranging (NFER) Indoor Location
 Indoor Location") Near-Field Electromagnetic Ranging (NFER) Indoor Location 21 st Test Instrumentation Workshop Thursday May 11, 2017 Hans G. Schantz h.schantz@q-track.com Q-Track Corporation Sheila Jones sheila.jones@navy.mil
Near-Field Electromagnetic Ranging (NFER) Indoor Location 21 st Test Instrumentation Workshop Thursday May 11, 2017 Hans G. Schantz h.schantz@q-track.com Q-Track Corporation Sheila Jones sheila.jones@navy.mil
Agenda Motivation Systems and Sensors Algorithms Implementation Conclusion & Outlook
 Overview of Current Indoor Navigation Techniques and Implementation Studies FIG ww 2011 - Marrakech and Christian Lukianto HafenCity University Hamburg 21 May 2011 1 Agenda Motivation Systems and Sensors
Overview of Current Indoor Navigation Techniques and Implementation Studies FIG ww 2011 - Marrakech and Christian Lukianto HafenCity University Hamburg 21 May 2011 1 Agenda Motivation Systems and Sensors
IoT Wi-Fi- based Indoor Positioning System Using Smartphones
 IoT Wi-Fi- based Indoor Positioning System Using Smartphones Author: Suyash Gupta Abstract The demand for Indoor Location Based Services (LBS) is increasing over the past years as smartphone market expands.
IoT Wi-Fi- based Indoor Positioning System Using Smartphones Author: Suyash Gupta Abstract The demand for Indoor Location Based Services (LBS) is increasing over the past years as smartphone market expands.
GPS-Aided INS Datasheet Rev. 2.6
 GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
25 Rapid Intervention Team
 Section 1: Scope Section 2: Purpose Section 3: Definitions Section 4: Procedure Form 1: RIT Team Equipment Card Form 2: Mayday Quick Card Form 3: Section 5: Communications & Radio Procedures Section 6:
Section 1: Scope Section 2: Purpose Section 3: Definitions Section 4: Procedure Form 1: RIT Team Equipment Card Form 2: Mayday Quick Card Form 3: Section 5: Communications & Radio Procedures Section 6:
NovAtel s. Performance Analysis October Abstract. SPAN on OEM6. SPAN on OEM6. Enhancements
 NovAtel s SPAN on OEM6 Performance Analysis October 2012 Abstract SPAN, NovAtel s GNSS/INS solution, is now available on the OEM6 receiver platform. In addition to rapid GNSS signal reacquisition performance,
NovAtel s SPAN on OEM6 Performance Analysis October 2012 Abstract SPAN, NovAtel s GNSS/INS solution, is now available on the OEM6 receiver platform. In addition to rapid GNSS signal reacquisition performance,
Hydroacoustic Aided Inertial Navigation System - HAIN A New Reference for DP
 Return to Session Directory Return to Session Directory Doug Phillips Failure is an Option DYNAMIC POSITIONING CONFERENCE October 9-10, 2007 Sensors Hydroacoustic Aided Inertial Navigation System - HAIN
Return to Session Directory Return to Session Directory Doug Phillips Failure is an Option DYNAMIC POSITIONING CONFERENCE October 9-10, 2007 Sensors Hydroacoustic Aided Inertial Navigation System - HAIN
The Technologies behind a Context-Aware Mobility Solution
 The Technologies behind a Context-Aware Mobility Solution Introduction The concept of using radio frequency techniques to detect or track entities on land, in space, or in the air has existed for many
The Technologies behind a Context-Aware Mobility Solution Introduction The concept of using radio frequency techniques to detect or track entities on land, in space, or in the air has existed for many
Webinar. 9 things you should know about centimeter-level GNSS accuracy
 Webinar 9 things you should know about centimeter-level GNSS accuracy Webinar agenda 9 things you should know about centimeter-level GNSS accuracy 1. High precision GNSS challenges 2. u-blox F9 technology
Webinar 9 things you should know about centimeter-level GNSS accuracy Webinar agenda 9 things you should know about centimeter-level GNSS accuracy 1. High precision GNSS challenges 2. u-blox F9 technology
Ubiquitous Positioning: A Pipe Dream or Reality?
 Ubiquitous Positioning: A Pipe Dream or Reality? Professor Terry Moore The University of What is Ubiquitous Positioning? Multi-, low-cost and robust positioning Based on single or multiple users Different
Ubiquitous Positioning: A Pipe Dream or Reality? Professor Terry Moore The University of What is Ubiquitous Positioning? Multi-, low-cost and robust positioning Based on single or multiple users Different
FLCS V2.1. AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station
 AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
PHINS, An All-In-One Sensor for DP Applications
 DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
Hardware-free Indoor Navigation for Smartphones
 Hardware-free Indoor Navigation for Smartphones 1 Navigation product line 1996-2015 1996 1998 RTK OTF solution with accuracy 1 cm 8-channel software GPS receiver 2004 2007 Program prototype of Super-sensitive
Hardware-free Indoor Navigation for Smartphones 1 Navigation product line 1996-2015 1996 1998 RTK OTF solution with accuracy 1 cm 8-channel software GPS receiver 2004 2007 Program prototype of Super-sensitive
Helicopter Aerial Laser Ranging
 Helicopter Aerial Laser Ranging Håkan Sterner TopEye AB P.O.Box 1017, SE-551 11 Jönköping, Sweden 1 Introduction Measuring distances with light has been used for terrestrial surveys since the fifties.
Helicopter Aerial Laser Ranging Håkan Sterner TopEye AB P.O.Box 1017, SE-551 11 Jönköping, Sweden 1 Introduction Measuring distances with light has been used for terrestrial surveys since the fifties.
A MULTI-SENSOR FUSION FOR INDOOR-OUTDOOR LOCALIZATION USING A PARTICLE FILTER
 A MULTI-SENSOR FUSION FOR INDOOR-OUTDOOR LOCALIZATION USING A PARTICLE FILTER Abdelghani BELAKBIR 1, Mustapha AMGHAR 1, Nawal SBITI 1, Amine RECHICHE 1 ABSTRACT: The location of people and objects relative
A MULTI-SENSOR FUSION FOR INDOOR-OUTDOOR LOCALIZATION USING A PARTICLE FILTER Abdelghani BELAKBIR 1, Mustapha AMGHAR 1, Nawal SBITI 1, Amine RECHICHE 1 ABSTRACT: The location of people and objects relative
Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings. Amos Gellert, Nataly Kats
 Mr. Amos Gellert Technological aspects of level crossing facilities Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings Deputy General Manager
Mr. Amos Gellert Technological aspects of level crossing facilities Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings Deputy General Manager
How to introduce LORD Sensing s newest inertial sensors into your application
 LORD TECHNICAL NOTE Migrating from the 3DM-GX4 to the 3DM-GX5 How to introduce LORD Sensing s newest inertial sensors into your application Introduction The 3DM-GX5 is the latest generation of the very
LORD TECHNICAL NOTE Migrating from the 3DM-GX4 to the 3DM-GX5 How to introduce LORD Sensing s newest inertial sensors into your application Introduction The 3DM-GX5 is the latest generation of the very
Inertial Doppler Radio Locator (IDRL) for DoD Test Range Applications
 for DoD Test Range Applications") INNOVATIONS IN ENGINEERING Inertial Doppler Radio Locator (IDRL) for DoD Test Range Applications This project is funded by the Test Resource Management Center (TRMC) Test and Evaluation/Science and Technology
INNOVATIONS IN ENGINEERING Inertial Doppler Radio Locator (IDRL) for DoD Test Range Applications This project is funded by the Test Resource Management Center (TRMC) Test and Evaluation/Science and Technology
TRINITY Standard configuration for littoral defence
 Standard configuration for littoral defence Member of the Thales Mission Solution family Unrivalled tracking and fire control solution for small manoeuvring targets Innovative approach and easy to install
Standard configuration for littoral defence Member of the Thales Mission Solution family Unrivalled tracking and fire control solution for small manoeuvring targets Innovative approach and easy to install
GPS and Recent Alternatives for Localisation. Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney
 GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
Engineering Project Proposals
 Engineering Project Proposals (Wireless sensor networks) Group members Hamdi Roumani Douglas Stamp Patrick Tayao Tyson J Hamilton (cs233017) (cs233199) (cs232039) (cs231144) Contact Information Email:
Engineering Project Proposals (Wireless sensor networks) Group members Hamdi Roumani Douglas Stamp Patrick Tayao Tyson J Hamilton (cs233017) (cs233199) (cs232039) (cs231144) Contact Information Email:
Pedestrian Navigation System Using. Shoe-mounted INS. By Yan Li. A thesis submitted for the degree of Master of Engineering (Research)
") Pedestrian Navigation System Using Shoe-mounted INS By Yan Li A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information Technology University of Technology,
Pedestrian Navigation System Using Shoe-mounted INS By Yan Li A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information Technology University of Technology,
SPAN Technology System Characteristics and Performance
 SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
Utility of Sensor Fusion of GPS and Motion Sensor in Android Devices In GPS- Deprived Environment
 Utility of Sensor Fusion of GPS and Motion Sensor in Android Devices In GPS- Deprived Environment Amrit Karmacharya1 1 Land Management Training Center Bakhundol, Dhulikhel, Kavre, Nepal Tel:- +977-9841285489
Utility of Sensor Fusion of GPS and Motion Sensor in Android Devices In GPS- Deprived Environment Amrit Karmacharya1 1 Land Management Training Center Bakhundol, Dhulikhel, Kavre, Nepal Tel:- +977-9841285489
Mesh Networks. unprecedented coverage, throughput, flexibility and cost efficiency. Decentralized, self-forming, self-healing networks that achieve
 MOTOROLA TECHNOLOGY POSITION PAPER Mesh Networks Decentralized, self-forming, self-healing networks that achieve unprecedented coverage, throughput, flexibility and cost efficiency. Mesh networks technology
MOTOROLA TECHNOLOGY POSITION PAPER Mesh Networks Decentralized, self-forming, self-healing networks that achieve unprecedented coverage, throughput, flexibility and cost efficiency. Mesh networks technology
WPI Precision Personnel Location System: Rapid Deployment Antenna System and Sensor Fusion for 3D Precision Location
 WPI Precision Personnel Location System: Rapid Deployment Antenna System and Sensor Fusion for 3D Precision Location Andrew Cavanaugh, Matthew Lowe, David Cyganski, R. James Duckworth Precision Personnel
WPI Precision Personnel Location System: Rapid Deployment Antenna System and Sensor Fusion for 3D Precision Location Andrew Cavanaugh, Matthew Lowe, David Cyganski, R. James Duckworth Precision Personnel
TOOLBOX TALKS. Active Shooter Awareness. A Quality Service Contractors Publication for Members July What is an Active Shooter?
 Active Shooter Awareness These are just a few of the numerous active shooter instances that occur every year in the United States. A university, a movie theatre, a place of worship and an elementary school
Active Shooter Awareness These are just a few of the numerous active shooter instances that occur every year in the United States. A university, a movie theatre, a place of worship and an elementary school
RFID Technology for the Oil and Gas Industry. Stig Petersen, SINTEF ICT
 RFID Technology for the Oil and Gas Industry Stig Petersen, SINTEF ICT Image source: Statoil Agenda Industrial RFID Communication Challenges Noise, interference and obstructions Industrial RFID Application
RFID Technology for the Oil and Gas Industry Stig Petersen, SINTEF ICT Image source: Statoil Agenda Industrial RFID Communication Challenges Noise, interference and obstructions Industrial RFID Application
Indoor Positioning 101 TECHNICAL)WHITEPAPER) SenionLab)AB) Teknikringen)7) 583)30)Linköping)Sweden)
WHITEPAPER) SenionLab)AB) Teknikringen)7) 583)30)Linköping)Sweden)") Indoor Positioning 101 TECHNICAL)WHITEPAPER) SenionLab)AB) Teknikringen)7) 583)30)Linköping)Sweden) TechnicalWhitepaper)) Satellite-based GPS positioning systems provide users with the position of their
Indoor Positioning 101 TECHNICAL)WHITEPAPER) SenionLab)AB) Teknikringen)7) 583)30)Linköping)Sweden) TechnicalWhitepaper)) Satellite-based GPS positioning systems provide users with the position of their
Integrated Navigation System
 Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
A Hybrid Indoor Tracking System for First Responders
 A Hybrid Indoor Tracking System for First Responders Precision Indoor Personnel Location and Tracking for Emergency Responders Technology Workshop August 4, 2009 Marc Harlacher Director, Location Solutions
A Hybrid Indoor Tracking System for First Responders Precision Indoor Personnel Location and Tracking for Emergency Responders Technology Workshop August 4, 2009 Marc Harlacher Director, Location Solutions
The Swedish Armed Forces Sensor Study
 The Swedish Armed Forces Sensor Study 2013-14 Requirements for Air surveillance and Sea surface surveillance beyond 2025 (2040) The Swedish Armed Forces sensor study 2013-14 Chaired by SwAF HQ Plans And
The Swedish Armed Forces Sensor Study 2013-14 Requirements for Air surveillance and Sea surface surveillance beyond 2025 (2040) The Swedish Armed Forces sensor study 2013-14 Chaired by SwAF HQ Plans And
Phantom Dome - Advanced Drone Detection and jamming system
 Phantom Dome - Advanced Drone Detection and jamming system *Picture for illustration only 1 1. The emanating threat of drones In recent years the threat of drones has become increasingly vivid to many
Phantom Dome - Advanced Drone Detection and jamming system *Picture for illustration only 1 1. The emanating threat of drones In recent years the threat of drones has become increasingly vivid to many
Author s Name Name of the Paper Session. DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION. Sensing Autonomy.
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION Sensing Autonomy By Arne Rinnan Kongsberg Seatex AS Abstract A certain level of autonomy is already
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION Sensing Autonomy By Arne Rinnan Kongsberg Seatex AS Abstract A certain level of autonomy is already
HALS-H1 Ground Surveillance & Targeting Helicopter
 ARATOS-SWISS Homeland Security AG & SMA PROGRESS, LLC HALS-H1 Ground Surveillance & Targeting Helicopter Defense, Emergency, Homeland Security (Border Patrol, Pipeline Monitoring)... Automatic detection
ARATOS-SWISS Homeland Security AG & SMA PROGRESS, LLC HALS-H1 Ground Surveillance & Targeting Helicopter Defense, Emergency, Homeland Security (Border Patrol, Pipeline Monitoring)... Automatic detection
Title. Author Date Audience
 Prepared for: National Public Safety Telecommunications Council - The Voice of Public Safety Title Author Date Audience Sean O Hara (Syracuse Research Corp.) 09/21/04 4.8 GHz Incident Scenario and Simulation
Prepared for: National Public Safety Telecommunications Council - The Voice of Public Safety Title Author Date Audience Sean O Hara (Syracuse Research Corp.) 09/21/04 4.8 GHz Incident Scenario and Simulation
Prospects for Dynamic ISR Tasking and Interpretation Based on Standing Orders to Sensor Networks
 Prospects for Dynamic ISR Tasking and Interpretation Based on Standing Orders to Sensor Networks Aleksandar Pantaleev, John R. Josephson Laboratory for Artificial Intelligence Research Computer Science
Prospects for Dynamic ISR Tasking and Interpretation Based on Standing Orders to Sensor Networks Aleksandar Pantaleev, John R. Josephson Laboratory for Artificial Intelligence Research Computer Science
Contents Introduction...2 Revision Information...3 Terms and definitions...4 Overview...5 Part A. Layout and Topology of Wireless Devices...
 Technical Information TI 01W01A51-12EN Guidelines for Layout and Installation of Field Wireless Devices Contents Introduction...2 Revision Information...3 Terms and definitions...4 Overview...5 Part A.
Technical Information TI 01W01A51-12EN Guidelines for Layout and Installation of Field Wireless Devices Contents Introduction...2 Revision Information...3 Terms and definitions...4 Overview...5 Part A.
HTZ warfare MILITARY COMMUNICATION NETWORKS TECHNICAL SPECTRUM MANAGEMENT THE REFERENCE TOOL FOR ELECTRONIC WARFARE & TACTICAL COMMUNICATIONS
 THE REFERENCE TOOL FOR ELECTRONIC WARFARE & TACTICAL COMMUNICATIONS MILITARY COMMUNICATION NETWORKS ACCURATE BATTLEFIELD SIMULATION TECHNICAL SPECTRUM MANAGEMENT the most comprehensive radio planning solution
THE REFERENCE TOOL FOR ELECTRONIC WARFARE & TACTICAL COMMUNICATIONS MILITARY COMMUNICATION NETWORKS ACCURATE BATTLEFIELD SIMULATION TECHNICAL SPECTRUM MANAGEMENT the most comprehensive radio planning solution
Bluetooth Low Energy Sensing Technology for Proximity Construction Applications
 Bluetooth Low Energy Sensing Technology for Proximity Construction Applications JeeWoong Park School of Civil and Environmental Engineering, Georgia Institute of Technology, 790 Atlantic Dr. N.W., Atlanta,
Bluetooth Low Energy Sensing Technology for Proximity Construction Applications JeeWoong Park School of Civil and Environmental Engineering, Georgia Institute of Technology, 790 Atlantic Dr. N.W., Atlanta,
Integrated Positioning The Challenges New technology More GNSS satellites New applications Seamless indoor-outdoor More GNSS signals personal navigati
 Integrated Indoor Positioning and Navigation Professor Terry Moore Professor of Satellite Navigation Nottingham Geospatial Institute The University of Nottingham Integrated Positioning The Challenges New
Integrated Indoor Positioning and Navigation Professor Terry Moore Professor of Satellite Navigation Nottingham Geospatial Institute The University of Nottingham Integrated Positioning The Challenges New
GPS-Aided INS Datasheet Rev. 3.0
 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
RETINAR SECURITY SYSTEMS Retinar PTR & Retinar OPUS Vehicle Mounted Applications
 RETINAR SECURITY SYSTEMS Retinar PTR & Retinar OPUS Vehicle Mounted Applications 1 The world in the 21 st century is a chaotic place and threats to the public are diverse and complex more than ever. Due
RETINAR SECURITY SYSTEMS Retinar PTR & Retinar OPUS Vehicle Mounted Applications 1 The world in the 21 st century is a chaotic place and threats to the public are diverse and complex more than ever. Due
Mobile Security Fall 2015
 Mobile Security Fall 2015 Patrick Tague #8: Location Services 1 Class #8 Location services for mobile phones Cellular localization WiFi localization GPS / GNSS 2 Mobile Location Mobile location has become
Mobile Security Fall 2015 Patrick Tague #8: Location Services 1 Class #8 Location services for mobile phones Cellular localization WiFi localization GPS / GNSS 2 Mobile Location Mobile location has become
BE HEARD ON THE FRONT LINE
 BE HEARD ON THE FRONT LINE DEFENCE SOLUTIONS Unable To Talk Across Comms Devices Tactical operations require the flexibility for troops to communicate from remote locations, while on foot and in vehicles.
BE HEARD ON THE FRONT LINE DEFENCE SOLUTIONS Unable To Talk Across Comms Devices Tactical operations require the flexibility for troops to communicate from remote locations, while on foot and in vehicles.
The EDA SUM Project. Surveillance in an Urban environment using Mobile sensors. 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012
 Surveillance in an Urban environment using Mobile sensors 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012 TABLE OF CONTENTS European Defence Agency Supported Project 1. SUM Project Description. 2. Subsystems
Surveillance in an Urban environment using Mobile sensors 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012 TABLE OF CONTENTS European Defence Agency Supported Project 1. SUM Project Description. 2. Subsystems
Workshop on Precision Indoor Tracking and Positioning
 Workshop on Precision Indoor Tracking and Positioning The following slides contain informal overall summaries and conclusions from the working sessions. Overall Workshop Conclusions Need Systems approach
Workshop on Precision Indoor Tracking and Positioning The following slides contain informal overall summaries and conclusions from the working sessions. Overall Workshop Conclusions Need Systems approach
High Power Microwaves
 FACT SHEET UNITED STATES AIR FORCE Air Force Research Laboratory, Office of Public Affairs, 3550 Aberdeen Avenue S.E., Kirtland AFB, NM 87117 5776 (505) 846 1911; Fax (505) 846 0423 INTERNET: http://www.de.afrl.af.mil/pa/factsheets/
FACT SHEET UNITED STATES AIR FORCE Air Force Research Laboratory, Office of Public Affairs, 3550 Aberdeen Avenue S.E., Kirtland AFB, NM 87117 5776 (505) 846 1911; Fax (505) 846 0423 INTERNET: http://www.de.afrl.af.mil/pa/factsheets/
Range Sensing strategies
 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
MULTIPATH EFFECT MITIGATION IN SIGNAL PROPAGATION THROUGH AN INDOOR ENVIRONMENT
 JOURNAL OF APPLIED ENGINEERING SCIENCES VOL. 2(15), issue 2_2012 ISSN 2247-3769 ISSN-L 2247-3769 (Print) / e-issn:2284-7197 MULTIPATH EFFECT MITIGATION IN SIGNAL PROPAGATION THROUGH AN INDOOR ENVIRONMENT
JOURNAL OF APPLIED ENGINEERING SCIENCES VOL. 2(15), issue 2_2012 ISSN 2247-3769 ISSN-L 2247-3769 (Print) / e-issn:2284-7197 MULTIPATH EFFECT MITIGATION IN SIGNAL PROPAGATION THROUGH AN INDOOR ENVIRONMENT
Brainstorm. In addition to cameras / Kinect, what other kinds of sensors would be useful?
 Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
Senion IPS 101. An introduction to Indoor Positioning Systems
 Senion IPS 101 An introduction to Indoor Positioning Systems INTRODUCTION Indoor Positioning 101 What is Indoor Positioning Systems? 3 Where IPS is used 4 How does it work? 6 Diverse Radio Environments
Senion IPS 101 An introduction to Indoor Positioning Systems INTRODUCTION Indoor Positioning 101 What is Indoor Positioning Systems? 3 Where IPS is used 4 How does it work? 6 Diverse Radio Environments
Inertial Sensors. Ellipse Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.2 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.2 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Chapter 2 Threat FM 20-3
 Chapter 2 Threat The enemy uses a variety of sensors to detect and identify US soldiers, equipment, and supporting installations. These sensors use visual, ultraviolet (W), infared (IR), radar, acoustic,
Chapter 2 Threat The enemy uses a variety of sensors to detect and identify US soldiers, equipment, and supporting installations. These sensors use visual, ultraviolet (W), infared (IR), radar, acoustic,
Improving Performance through Superior Innovative Antenna Technologies
 Improving Performance through Superior Innovative Antenna Technologies INTRODUCTION: Cell phones have evolved into smart devices and it is these smart devices that have become such a dangerous weapon of
Improving Performance through Superior Innovative Antenna Technologies INTRODUCTION: Cell phones have evolved into smart devices and it is these smart devices that have become such a dangerous weapon of
High Precision Urban and Indoor Positioning for Public Safety
 High Precision Urban and Indoor Positioning for Public Safety NextNav LLC September 6, 2012 2012 NextNav LLC Mobile Wireless Location: A Brief Background Mass-market wireless geolocation for wireless devices
High Precision Urban and Indoor Positioning for Public Safety NextNav LLC September 6, 2012 2012 NextNav LLC Mobile Wireless Location: A Brief Background Mass-market wireless geolocation for wireless devices
CENG 5931 HW 5 Mobile Robotics Due March 5. Sensors for Mobile Robots
 CENG 5931 HW 5 Mobile Robotics Due March 5 Sensors for Mobile Robots Dr. T. L. Harman: 281 283-3774 Office D104 For reports: Read HomeworkEssayRequirements on the web site and follow instructions which
CENG 5931 HW 5 Mobile Robotics Due March 5 Sensors for Mobile Robots Dr. T. L. Harman: 281 283-3774 Office D104 For reports: Read HomeworkEssayRequirements on the web site and follow instructions which
Position, Navigation, and Timing Branch C2D, Battle Command Division Fort Monmouth, NJ
 Position, Navigation, and Timing Branch C2D, Battle Command Division Fort Monmouth, NJ Soldier Navigation Architecture Study Presented by Van Tran / Gina Guiducci August 3, 2009 Who We Are Department of
Position, Navigation, and Timing Branch C2D, Battle Command Division Fort Monmouth, NJ Soldier Navigation Architecture Study Presented by Van Tran / Gina Guiducci August 3, 2009 Who We Are Department of
A Review of Vulnerabilities of ADS-B
 A Review of Vulnerabilities of ADS-B S. Sudha Rani 1, R. Hemalatha 2 Post Graduate Student, Dept. of ECE, Osmania University, 1 Asst. Professor, Dept. of ECE, Osmania University 2 Email: ssrani.me.ou@gmail.com
A Review of Vulnerabilities of ADS-B S. Sudha Rani 1, R. Hemalatha 2 Post Graduate Student, Dept. of ECE, Osmania University, 1 Asst. Professor, Dept. of ECE, Osmania University 2 Email: ssrani.me.ou@gmail.com
STANDARD OPERATING GUIDELINES FOR MAYDAY OPERATIONS
 S FOR MAYDAY OPERATIONS Supersedes FCFCA SOP, 9/1/2003 PURPOSE: The objective of this guideline is to establish language and procedures used in response to an incident MAYDAY situation. TERMINOLOGY: A.
S FOR MAYDAY OPERATIONS Supersedes FCFCA SOP, 9/1/2003 PURPOSE: The objective of this guideline is to establish language and procedures used in response to an incident MAYDAY situation. TERMINOLOGY: A.
GPS-Aided INS Datasheet Rev. 2.7
 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
Real-Time Spectrum Monitoring System Provides Superior Detection And Location Of Suspicious RF Traffic
 Real-Time Spectrum Monitoring System Provides Superior Detection And Location Of Suspicious RF Traffic By Malcolm Levy, Vice President, Americas, CRFS Inc., California INTRODUCTION TO RF SPECTRUM MONITORING
Real-Time Spectrum Monitoring System Provides Superior Detection And Location Of Suspicious RF Traffic By Malcolm Levy, Vice President, Americas, CRFS Inc., California INTRODUCTION TO RF SPECTRUM MONITORING
GPS-Aided INS Datasheet Rev. 2.3
 GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
Improving Emergency Response and Human- Robotic Performance
 Improving Emergency Response and Human- Robotic Performance 8 th David Gertman, David J. Bruemmer, and R. Scott Hartley Idaho National Laboratory th Annual IEEE Conference on Human Factors and Power Plants
Improving Emergency Response and Human- Robotic Performance 8 th David Gertman, David J. Bruemmer, and R. Scott Hartley Idaho National Laboratory th Annual IEEE Conference on Human Factors and Power Plants
Platform Independent Launch Vehicle Avionics
 Platform Independent Launch Vehicle Avionics Small Satellite Conference Logan, Utah August 5 th, 2014 Company Introduction Founded in 2011 The Co-Founders blend Academia and Commercial Experience ~20 Employees
Platform Independent Launch Vehicle Avionics Small Satellite Conference Logan, Utah August 5 th, 2014 Company Introduction Founded in 2011 The Co-Founders blend Academia and Commercial Experience ~20 Employees
Inertial Sensors. Ellipse Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
INTRODUCTION TO VEHICLE NAVIGATION SYSTEM LECTURE 5.1 SGU 4823 SATELLITE NAVIGATION
 INTRODUCTION TO VEHICLE NAVIGATION SYSTEM LECTURE 5.1 SGU 4823 SATELLITE NAVIGATION AzmiHassan SGU4823 SatNav 2012 1 Navigation Systems Navigation ( Localisation ) may be defined as the process of determining
INTRODUCTION TO VEHICLE NAVIGATION SYSTEM LECTURE 5.1 SGU 4823 SATELLITE NAVIGATION AzmiHassan SGU4823 SatNav 2012 1 Navigation Systems Navigation ( Localisation ) may be defined as the process of determining
GPS-denied Pedestrian Tracking in Indoor Environments Using an IMU and Magnetic Compass
 GPS-denied Pedestrian Tracking in Indoor Environments Using an IMU and Magnetic Compass W. Todd Faulkner, Robert Alwood, David W. A. Taylor, Jane Bohlin Advanced Projects and Applications Division ENSCO,
GPS-denied Pedestrian Tracking in Indoor Environments Using an IMU and Magnetic Compass W. Todd Faulkner, Robert Alwood, David W. A. Taylor, Jane Bohlin Advanced Projects and Applications Division ENSCO,
Deployment and Testing of Optimized Autonomous and Connected Vehicle Trajectories at a Closed- Course Signalized Intersection
 Deployment and Testing of Optimized Autonomous and Connected Vehicle Trajectories at a Closed- Course Signalized Intersection Clark Letter*, Lily Elefteriadou, Mahmoud Pourmehrab, Aschkan Omidvar Civil
Deployment and Testing of Optimized Autonomous and Connected Vehicle Trajectories at a Closed- Course Signalized Intersection Clark Letter*, Lily Elefteriadou, Mahmoud Pourmehrab, Aschkan Omidvar Civil
UWB RFID Technology Applications for Positioning Systems in Indoor Warehouses
 UWB RFID Technology Applications for Positioning Systems in Indoor Warehouses # SU-HUI CHANG, CHEN-SHEN LIU # Industrial Technology Research Institute # Rm. 210, Bldg. 52, 195, Sec. 4, Chung Hsing Rd.
UWB RFID Technology Applications for Positioning Systems in Indoor Warehouses # SU-HUI CHANG, CHEN-SHEN LIU # Industrial Technology Research Institute # Rm. 210, Bldg. 52, 195, Sec. 4, Chung Hsing Rd.
S a t e l l i t e T i m e a n d L o c a t i o n. N o v e m b e r John Fischer VP Advanced R&D
 STL - S a t e l l i t e T i m e a n d L o c a t i o n N o v e m b e r 2 0 1 7 John Fischer VP Advanced R&D jfischer@orolia.com 11/28/201 1 7 WHY AUGMENT GNSS? Recent UK Study Economic Input to UK of a
STL - S a t e l l i t e T i m e a n d L o c a t i o n N o v e m b e r 2 0 1 7 John Fischer VP Advanced R&D jfischer@orolia.com 11/28/201 1 7 WHY AUGMENT GNSS? Recent UK Study Economic Input to UK of a
59TH ANNUAL FUZE CONFERENCE MAY 3-5, 2016 CHARLESTON, SC Fuzing Challenges for Guided Ammunition
 59TH ANNUAL FUZE CONFERENCE MAY 3-5, 2016 CHARLESTON, SC Fuzing Challenges for Guided Ammunition Introduction: Finmeccanica Guided Ammunition DART (Driven Ammunition Reduced Time-of-flight) Fired by Naval
59TH ANNUAL FUZE CONFERENCE MAY 3-5, 2016 CHARLESTON, SC Fuzing Challenges for Guided Ammunition Introduction: Finmeccanica Guided Ammunition DART (Driven Ammunition Reduced Time-of-flight) Fired by Naval
Wi-Fi Fingerprinting through Active Learning using Smartphones
 Wi-Fi Fingerprinting through Active Learning using Smartphones Le T. Nguyen Carnegie Mellon University Moffet Field, CA, USA le.nguyen@sv.cmu.edu Joy Zhang Carnegie Mellon University Moffet Field, CA,
Wi-Fi Fingerprinting through Active Learning using Smartphones Le T. Nguyen Carnegie Mellon University Moffet Field, CA, USA le.nguyen@sv.cmu.edu Joy Zhang Carnegie Mellon University Moffet Field, CA,
Case sharing of the use of RF Localization Techniques. Dr. Frank Tong LSCM R&D Centre LSCM Summit 2015
 Case sharing of the use of RF Localization Techniques Dr. Frank Tong LSCM R&D Centre LSCM Summit 2015 Outline A. LBS tracking and monitoring 1) Case of anti-wandering-off tracking vest system in elderly
Case sharing of the use of RF Localization Techniques Dr. Frank Tong LSCM R&D Centre LSCM Summit 2015 Outline A. LBS tracking and monitoring 1) Case of anti-wandering-off tracking vest system in elderly
Inertial Systems. Ekinox Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX SERIES R&D specialists usually compromise between high
Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX SERIES R&D specialists usually compromise between high
Cutting-edge Technology for Data and Communications
 Cutting-edge Technology for Data and Communications PAGE 1 Guido Perez Business Development Manager 617-671-5747 g.perez@mstglobal.com Table of Contents TUNNEL & COMMUNICATION EVOLUTION CHALLENGES IN TUNNELS
Cutting-edge Technology for Data and Communications PAGE 1 Guido Perez Business Development Manager 617-671-5747 g.perez@mstglobal.com Table of Contents TUNNEL & COMMUNICATION EVOLUTION CHALLENGES IN TUNNELS
A Comparative Study on different AI Techniques towards Performance Evaluation in RRM(Radar Resource Management)
") A Comparative Study on different AI Techniques towards Performance Evaluation in RRM(Radar Resource Management) Madhusudhan H.S, Assistant Professor, Department of Information Science & Engineering, VVIET,
A Comparative Study on different AI Techniques towards Performance Evaluation in RRM(Radar Resource Management) Madhusudhan H.S, Assistant Professor, Department of Information Science & Engineering, VVIET,
V2X-Locate Positioning System Whitepaper
 V2X-Locate Positioning System Whitepaper November 8, 2017 www.cohdawireless.com 1 Introduction The most important piece of information any autonomous system must know is its position in the world. This
V2X-Locate Positioning System Whitepaper November 8, 2017 www.cohdawireless.com 1 Introduction The most important piece of information any autonomous system must know is its position in the world. This
D Locator Indoor Positioning for Firefighters and Other First Responders. WPI Technology Workshop 5 August 2008
 Advanced 3-D 3 D Locator Indoor Positioning for Firefighters and Other First Responders WPI Technology Workshop 5 August 2008 Steve Rounds L-3 3 Communications Interstate Electronics Corp Anaheim, CA 1
Advanced 3-D 3 D Locator Indoor Positioning for Firefighters and Other First Responders WPI Technology Workshop 5 August 2008 Steve Rounds L-3 3 Communications Interstate Electronics Corp Anaheim, CA 1
Utilizing Batch Processing for GNSS Signal Tracking
 Utilizing Batch Processing for GNSS Signal Tracking Andrey Soloviev Avionics Engineering Center, Ohio University Presented to: ION Alberta Section, Calgary, Canada February 27, 2007 Motivation: Outline
Utilizing Batch Processing for GNSS Signal Tracking Andrey Soloviev Avionics Engineering Center, Ohio University Presented to: ION Alberta Section, Calgary, Canada February 27, 2007 Motivation: Outline
IMAGE FORMATION THROUGH WALLS USING A DISTRIBUTED RADAR SENSOR NETWORK. CIS Industrial Associates Meeting 12 May, 2004 AKELA
 IMAGE FORMATION THROUGH WALLS USING A DISTRIBUTED RADAR SENSOR NETWORK CIS Industrial Associates Meeting 12 May, 2004 THROUGH THE WALL SURVEILLANCE IS AN IMPORTANT PROBLEM Domestic law enforcement and
IMAGE FORMATION THROUGH WALLS USING A DISTRIBUTED RADAR SENSOR NETWORK CIS Industrial Associates Meeting 12 May, 2004 THROUGH THE WALL SURVEILLANCE IS AN IMPORTANT PROBLEM Domestic law enforcement and