R H I N O S Railway High Integrity Navigation Overlay System
|
|
|
- Griselda Lloyd
- 5 years ago
- Views:
Transcription


1 R H I N O S Railway High Integrity Navigation Overlay System RHINOS Integrity Monitoring and Augmentation Subsystem Reference Architectures Cosimo Stallo RadioLabs Rome SOGEI premises June 21 th 2017
2 Table of Content 1. Requirements Review for Rail Community 2. Candidate AIMN Architectures Definition following current and future Augmentation System Trends 3. PRO-CON Analysis and Ranking Results 4. SWOT Analysis applied to two ranked Architectures 5. Selected Augmentation Architecture Definition 6. Architectural Blocks Definition 7. Fault Tree Analysis 8. Experimental results
3 Main Goals to select the Integrity Monitoring and Augmentation subsystem architecture after collection and comparison of a set of candidates; to define the infrastructure elements that can be shared with the corresponding avionics solutions; to review the analytical models to evaluate system performances; to perform Common Mode Failure (CMF)/ Common Cause Failure (CCF) analysis and safety design of selected architectures.
4 Participants RadioLabs (WP7 Leader): Collection of the candidate solutions for the AIMN subsystem and selection of the AIMN reference architecture SOGEI: PRO-CON Analysis on AIMN Architecture Candidate Solutions Ansaldo STS: Rail Sector requirements review and Definition of Architectural components and Interfaces with reference to the existing TCS for High Integrity LA University of Pardubice: Performance comparison of the candidate solutions for the AIMN subsystem DLR: Multiconstellation and/or multi-frequency receivers. ARAIM. University of Nottingham: Environmental Faults Modelling

5 Requirements Review Third RHINOS Workshop Rome SOGEI 06/21/2017
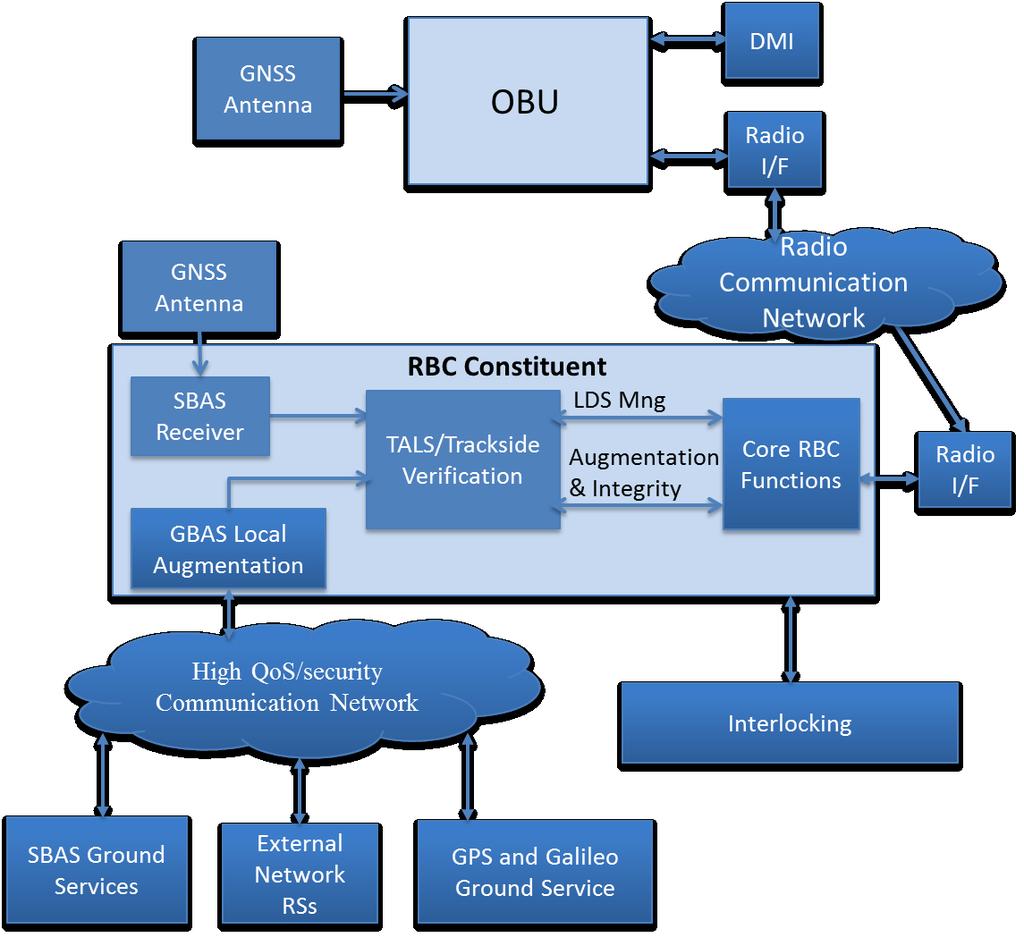
6 System Architecture
7 Candidate Augmentation Architectures Application Domain Accuracy Integrity SBAS Aviation < 2 m 10-7 /150s GBAS/DGNSS Aviation/Maritime <16 m /150s RTK/NRTK Surveying < 5 cm (AF) * PPP Surveying Maritime Autonomous Driving *Under study (CRAIM and AR Integrity) 10 cm (Float) < 10 cm (AR) No single system can currently meet Rail Requirements: Longitudinal: Max balise detection error: 1 m THR=10-9 /h Lateral: accuracy: 3m THR=10-9 /h *
8 List of Identified Candidate Solutions GBAS: it represents GBAS solution; HA/DGNSS: it represents a cross transport modes solution following the HA/DGPS initiative; NRTK+CRAIM: it represents existing Network RTK solutions extended through CRAIM (Carrier Phase RAIM) capabilities for covering Integrity requirements 2-Tiers solution: it is the 2-Tiers solution integrating Local Augmentation and SBAS NRTK+ARAIM: it is the NRTK solution augmented with ARAIM capabilities at Network and user level for SIS IM THA/RAIM: it represents a high Accuracy Network for Rail improved with OBU RAIM for achieving high integrity performances; relevant costs can be shared with other transport modes requiring the same performance levels PPP/ARAIM/CRAIM: it represents the integration of FAST PPP (including Accurate Real-Time Ionospheric Monitoring) and ARAIM+CRAIM for improving Integrity performances
9 Ranking Criterias and Weigths Suitability for Rail Deployment Costs THR or Confidence Interval for Rail Maintenance cost Accuracy for normal operations Ionospheric Monitoring Accuracy for parallel track discrimination OBU Complexity Time To Fix Ambiguities (Ambiguity Resolution) Communication needs Availability Coverage Continuity Standardisation TTA or equivalent Maturity Weigths Description Weight Very Adequate 4 Adequate 3 Discrete 2 Sufficient 1 Not appropriate 0

10 PRO-CON Analysis - Ranking Results PRO CON Difference Ranking GBAS HA-DGNSS NRTK+IM Tiers (SBAS+LADGNSS) NRTK+ARAIM THA/RAIM PPP/ARAIM/CRAIM SBAS Main Message: Integration is the Winning Card!


11 SWOT Analysis Results First Two Ranked Architectures from PRO-CON Analysis

12 Reference GNSS Local Augmentation Architecture
13 Interfaces vs External Sources To TALS SBAS Ground Services RIMS Network Raw data/sbas Msgs Terrestrial Broadcasting External Network GPS and Galileo Ground Services GRSP IGS IGS-RTS RTCM /1005 RTCM /1005 MSM High QoS/security Communication Network RBC Costituent GNSS Local Augmentation Rail RS Network Fundamental role of High QoS (low Latency) High Security Communication Network: Very Hazardous Hackering consequences EoP SP3 at global level! RTCM SSR Messages (Sat biases Precise Eph/Clock STEC)
14 Integrity Monitoring: GBAS and 2-Tiers Purpose: it determines Faulty SISs Constellations and RSs and passes clean raw data and Integrity Masks to other blocks Processing: GBAS algorithms 2-Tiers algorithms Interfaces: RTCM/MSM New RTCM proposals (RTCM prop.) Data Acquisition Rail RS Network Spoofing Detection RTCM 3 100x MSM Spoofing Mask (RTCM-like) Integrity Monitoring RS FDE SIS FDE Integrity Parameters Augmentation Processing and Msgs Generation Healthy Sat and Const Mask (RTCM prop.)
15 Integrity Parameters Purpose: it calculates parameters needed for Integrity Monitoring Augmentation messages generation Processing: RS and SIS statistics Estimators par. Interfaces: RTCM RTCA-246D RTCM prop. Data Acquisition RTCM 3 100x MSM Integrity Monitoring RS FDE SIS FDE Integrity Parameters P Sat F P i i Augmentation Processing and Msgs Generation RTCA-246D Type Tiers par. RTCM prop. Const F P LA F
16 Local Atmospheric Monitoring Purpose: it performs a Local Atmospheric conditions monitoring and detectes anomalous conditions Processing: Gradient Estimation Vert. Iono Grad. Std est. Tropo refractivity est. Interfaces: GBAS Type 2 RTCM prop. Integrity Monitoring RS FDE SIS FDE Local Atmospheric Monitoring Augmentation Processing and Msgs Generation GBAS Type 2 RTCM prop. Measurement Corrections
17 Network Processing for High Accuracy Purpose: it performs needed computations for allowing RTK NRTK and be enabled for RT PPP AR Processing: Network AR starting from widelaning meas. (RTK NRTK) POD using IGS-RTS ultrarapid RT SSR RTCM mesgs (PPP) Satellites DCBs estimation using GNSS Ground Services (PPP) Accurate STEC (PPP) Measurement Corrections Network AR Network Processing for High Accuracy Precise Orbit/Clock* Satellite Biases* Accurate STEC* RTCM SSR RTCM prop
18 Measurements Corrections Purpose: generation of measurement corrections (PRC RRC RTK/NRTK raws or Area corrections) to be sent to the TALS for transferring to the OBU Processing: PRC and RRC calculation RTK/NRTK/VRS raws PPP errors estimation Interfaces: RTCM 1000x RTCM SSR RTCM prop. RTCA-246D RTCM 100x RTCM SSR RTCM prop RTCA-246D TALS Augmentation Processing and Msgs Generation Measurement Corrections
19 Spoofing Detection Purpose: it detects spoofed satellites and constellations and sends Spoofing Masks to other blocks Processing: Network Monitoring: P/Y-C/A correlations PRS C/N0 CRPA Antennas Others Interfaces: RTCM 100x MSM RTCM Prop. (Spoofing Mask) RTCM 100x MSM Spoofing Detection Data Acquisition RTCM prop (Spoofing Mask) Integrity Monitoring RS FDE SIS FDE
20 Local Augmentation Fault Cases Hints Wrong Receiver channels behaviour (2%) Reference Receiver MotherBoard Failures (4%) Unexpected Multipath (2%) Antenna displacement-environmental causes (2%) Failures in the communication link between the Control Centre and the RR (56%) Failures in the Reference Station Power System (20%) Human Intervention (2%) Failures in the Control Centre Software Processing (5%) Severe Lighting (1%) Others (6%) Approximated values from empirical data
21 Current NRTK Specificities Local Augmentation coverage: National Level NRTK/MAC: Master Station for Corrections Calculation Multi-Reference System: Recovery of Single Receiver faults Based on continuous clusters of 4-5 Reference Stations OSR (Observation State Representation) or SSR (State Space Representation) corrections Baselines <= 70 Km Cluster 1 Cluster 2 Master1 Master2
22 GNSS Augmentation Fault Analysis 5 RSs/Cluster COTS RS MTBF (nominal): h COTS RS MTBF (not nominal: comm. link signal deformations..): about 2 years Pr Fault RS (shared among 5 RSs): /h P MD =10-4 /h THR= /h Generalised B-Values for H1 (NRTK) Ephemeris Fault MDE to be revised (longer baselines) H2 FDE perfomance can be improved through 2-Tiers
23 Generalised B-Values for LA and NRTK Measurement Corrections Software (MC SW) calculates corrections through all possible Subnetworks of M-1 RSs in a cluster excluding at each step one the Master Station of the whole set ) ( 4 1 ) ( ) ( ) ( 4 1 ) ( ) ( z y x PHCN z y x PHCN z y x BN z y x PRCN z y x PRCN z y x BN m j j n j n n m m j j n j n n Pm Master ) ( z y x PRCN n PRC calculated by the MC SW ) ( z y x PHCN n Phase Range Raws/Corrections calculated by the MC SW Network Ambiguities Fixed by the NRTK MC SW xyz= Prediction Point close to the user (e.g. VRS) or Cluster centroid NRTK

24 THR for VB detection
. The OBU equipment is on the diesel automotrice ALN 668 3114.")

25 Experimental Results from ERSAT-EAV Test Environment: Scenario 1 - not ERTMS Sardinia: Track Cagliari San Gavino October TAAN Augmentation Network messages are processed by TALS implemented on a Laptop (COTS equipment). The OBU equipment is on the diesel automotrice ALN Both constellations GPS and GALILEO are used. Case 1 - Three TAAN RSs TAAN-CC integrity monitoring TALS and OBU processing and positioning for rides in nominal condition without any faults using GPS and Galileo satellites. Case 2 - Three TAAN RSs TAAN-CC integrity monitoring TALS and OBU processing and positioning for ride where satellite faults are injected in Real-Time by TAAN. The faults are simulated on GPS PRN 01 PRN 03 PRN 06 PRN 07 PRN 09 and PRN 17 along the track San Gavino Cagliari on 25th of October Case 3 - Three TAAN RSs TAAN-CC integrity monitoring TALS and OBU processing and positioning for ride using only GPS constellation.
26 Protection Level (m) Number of Points per Pixel Experimental Results from ERSAT-EAV Case 1: Nominal Conditions GPS+ Galileo 2016/10/24 San Gavino - Cagliari 50 Stanford Diagram (1260 epochs) System Unavailable Alarm Epochs: 0 Normal Operation MI epochs: MI epochs: 0 HMI epochs: Error (m)
27 Experimental Results from ERSAT-EAV Case 2: Faulty satellites GPS+ Galileo 2016/10/25 San Gavino - Cagliari

28 Experimental Results from ERSAT-EAV Case 3: GPS only 2016/10/26 San Gavino - Cagliari
29 Conclusions and Future Steps Conclusions: Integration of High Accuracy and High Integrity Architectures for meeting requirements 2-Tiers algorithms for SIS and RSs for Augmentation FDE to be adopted by Internal and External Networks Openess to innovative HP algorithms Standardisation: existing and new messages Importance of High QoS/Secure Communication Links Ongoing and future steps: Feedbacks from POC and Performance Analysis RHINOS Architecture Refinement

30 Thank you for your attention
ERSAT - EAV. ERTMS on SATELLITE Enabling Application Validation. Pacific PNT May 2-4, 2017 Honolulu, Hawaii
 Pacific PNT May 2-4, 2017 Honolulu, Hawaii ERSAT - EAV ERTMS on SATELLITE Enabling Application Validation Alessandro Neri 1, Gianluigi Fontana 2, Salvatore Sabina 2, Francesco Rispoli 2, Roberto Capua
Pacific PNT May 2-4, 2017 Honolulu, Hawaii ERSAT - EAV ERTMS on SATELLITE Enabling Application Validation Alessandro Neri 1, Gianluigi Fontana 2, Salvatore Sabina 2, Francesco Rispoli 2, Roberto Capua
RHINOS Railway High Integrity Navigation Overlay System. RHINOS Workshop. 21 st June 2017 Performance Analysis Activity R.
 RHINOS Railway High Integrity Navigation Overlay System RHINOS Workshop 21 st June 2017 Performance Analysis Activity R. Capua (Sogei) Objectives Simulation and Analysis of High Precision and High Integrity
RHINOS Railway High Integrity Navigation Overlay System RHINOS Workshop 21 st June 2017 Performance Analysis Activity R. Capua (Sogei) Objectives Simulation and Analysis of High Precision and High Integrity
GNSS High Precision Systems for Cadastre: development, experiences and Galileo perspectives
 GNSS High Precision Systems for Cadastre: development, experiences and Galileo perspectives CLGE Plenary Workshop 29 September 2017 Roberto Capua, Flavio Ferrante DO-11-DO-03 1 Agenda GNSS High Precision
GNSS High Precision Systems for Cadastre: development, experiences and Galileo perspectives CLGE Plenary Workshop 29 September 2017 Roberto Capua, Flavio Ferrante DO-11-DO-03 1 Agenda GNSS High Precision
ERSAT EAV. ERSAT EAV Achievements & Roadmap The High Integrity Augmentation Architecture
 ERSAT EAV ERTMS on SATELLITE Enabling Application & Validation ERSAT EAV Achievements & Roadmap Roberto Capua Andrea Coluccia Fabio Frittella Maurizio Salvitti Prof. Alessandro Neri Giorgia Olivieri Veronica
ERSAT EAV ERTMS on SATELLITE Enabling Application & Validation ERSAT EAV Achievements & Roadmap Roberto Capua Andrea Coluccia Fabio Frittella Maurizio Salvitti Prof. Alessandro Neri Giorgia Olivieri Veronica
Roadmap for technology development and validation
 Roadmap for technology development and validation Alessandro Neri*, Francesco Rispoli**, Salvatore Sabina**, Veronica Palma*, Cosimo Stallo*, Andrea Coluccia*, Alessia Vennarini*, Pietro Salvatori* *RadioLabs
Roadmap for technology development and validation Alessandro Neri*, Francesco Rispoli**, Salvatore Sabina**, Veronica Palma*, Cosimo Stallo*, Andrea Coluccia*, Alessia Vennarini*, Pietro Salvatori* *RadioLabs
Mario Caporale, Alessandro Neri, Alberto Tuozzi ICG 10 Boulder
 High Integrity Navigation Overlay Services For Railway Applications: a selected example of Italian GNSS perspective Mario Caporale, Alessandro Neri, Alberto Tuozzi ICG 10 Boulder 2010 Italy and Satellite
High Integrity Navigation Overlay Services For Railway Applications: a selected example of Italian GNSS perspective Mario Caporale, Alessandro Neri, Alberto Tuozzi ICG 10 Boulder 2010 Italy and Satellite
ICG 9 PRAGUE 10 November 2014
 ICG 9 PRAGUE 10 November 2014 GNSS and applications GNSS is technology powerfully enabler of a multitude of applications. Italy, recognizing that, have undertaken initiatives to develop pre-operational
ICG 9 PRAGUE 10 November 2014 GNSS and applications GNSS is technology powerfully enabler of a multitude of applications. Italy, recognizing that, have undertaken initiatives to develop pre-operational
GNSS-based Location Determination System Architecture for Railway Performance Assessment in presence of local effects
 GNSS-based Location Determination System Architecture for Railway Performance Assessment in presence of local effects C. Stallo, A.Neri, P. Salvatori, A. Coluccia Consorzio RadioLabs, Corso d Italia 19,
GNSS-based Location Determination System Architecture for Railway Performance Assessment in presence of local effects C. Stallo, A.Neri, P. Salvatori, A. Coluccia Consorzio RadioLabs, Corso d Italia 19,
Assessing & Mitigation of risks on railways operational scenarios
 R H I N O S Railway High Integrity Navigation Overlay System Assessing & Mitigation of risks on railways operational scenarios Rome, June 22 nd 2017 Anja Grosch, Ilaria Martini, Omar Garcia Crespillo (DLR)
R H I N O S Railway High Integrity Navigation Overlay System Assessing & Mitigation of risks on railways operational scenarios Rome, June 22 nd 2017 Anja Grosch, Ilaria Martini, Omar Garcia Crespillo (DLR)
Introduction to Advanced RAIM. Juan Blanch, Stanford University July 26, 2016
 Introduction to Advanced RAIM Juan Blanch, Stanford University July 26, 2016 Satellite-based Augmentation Systems Credit: Todd Walter Receiver Autonomous Integrity Monitoring (556 m Horizontal Error Bound)
Introduction to Advanced RAIM Juan Blanch, Stanford University July 26, 2016 Satellite-based Augmentation Systems Credit: Todd Walter Receiver Autonomous Integrity Monitoring (556 m Horizontal Error Bound)
Prototyping Advanced RAIM for Vertical Guidance
 Prototyping Advanced RAIM for Vertical Guidance Juan Blanch, Myung Jun Choi, Todd Walter, Per Enge. Stanford University Kazushi Suzuki. NEC Corporation Abstract In the next decade, the GNSS environment
Prototyping Advanced RAIM for Vertical Guidance Juan Blanch, Myung Jun Choi, Todd Walter, Per Enge. Stanford University Kazushi Suzuki. NEC Corporation Abstract In the next decade, the GNSS environment
Precise Positioning GNSS Applications
 Precise Point Positioning: Is the Era of Differential GNSS Positioning Drawing to an End? School of Surveying & Spatial Information Systems, UNSW, Sydney, Australia Chris Rizos 1, Volker Janssen 2, Craig
Precise Point Positioning: Is the Era of Differential GNSS Positioning Drawing to an End? School of Surveying & Spatial Information Systems, UNSW, Sydney, Australia Chris Rizos 1, Volker Janssen 2, Craig
RTCM State Space Representation (SSR) Overall Concepts Towards PPP-RTK
 Overall Concepts Towards PPP-RTK") RTCM State Space Representation (SSR) Overall Concepts Towards PPP-RTK Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de Contents Terms and Abbreviations RTCM-SSR Working Group GNSS Error Sources
RTCM State Space Representation (SSR) Overall Concepts Towards PPP-RTK Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de Contents Terms and Abbreviations RTCM-SSR Working Group GNSS Error Sources
ARAIM Fault Detection and Exclusion
 ARAIM Fault Detection and Exclusion Boris Pervan Illinois Institute of Technology Chicago, IL November 16, 2017 1 RAIM ARAIM Receiver Autonomous Integrity Monitoring (RAIM) uses redundant GNSS measurements
ARAIM Fault Detection and Exclusion Boris Pervan Illinois Institute of Technology Chicago, IL November 16, 2017 1 RAIM ARAIM Receiver Autonomous Integrity Monitoring (RAIM) uses redundant GNSS measurements
SSR Technology for Scalable Real-Time GNSS Applications
 SSR Technology for Scalable Real-Time GNSS Applications Gerhard Wübbena, Jannes Wübbena, Temmo Wübbena, Martin Schmitz Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Abstract SSR Technology for scalable
SSR Technology for Scalable Real-Time GNSS Applications Gerhard Wübbena, Jannes Wübbena, Temmo Wübbena, Martin Schmitz Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Abstract SSR Technology for scalable
INTEGRITY AND CONTINUITY ANALYSIS FROM GPS JULY TO SEPTEMBER 2016 QUARTERLY REPORT
 INTEGRITY AND CONTINUITY ANALYSIS FROM GPS JULY TO SEPTEMBER 2016 QUARTERLY REPORT Name Responsibility Date Signature Prepared by M Pattinson (NSL) 07/10/16 Checked by L Banfield (NSL) 07/10/16 Authorised
INTEGRITY AND CONTINUITY ANALYSIS FROM GPS JULY TO SEPTEMBER 2016 QUARTERLY REPORT Name Responsibility Date Signature Prepared by M Pattinson (NSL) 07/10/16 Checked by L Banfield (NSL) 07/10/16 Authorised
Geodetic Reference via Precise Point Positioning - RTK
 2012 Geo++ GmbH Geodetic Reference via Precise Point Positioning - RTK Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de 2012 Geo++ GmbH Contents Terms and Abbreviations GNSS Principles GNSS
2012 Geo++ GmbH Geodetic Reference via Precise Point Positioning - RTK Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de 2012 Geo++ GmbH Contents Terms and Abbreviations GNSS Principles GNSS
ARAIM Integrity Support Message Parameter Validation by Online Ground Monitoring
 ARAIM Integrity Support Message Parameter Validation by Online Ground Monitoring Samer Khanafseh, Mathieu Joerger, Fang Cheng-Chan and Boris Pervan Illinois Institute of Technology, Chicago, IL ABSTRACT
ARAIM Integrity Support Message Parameter Validation by Online Ground Monitoring Samer Khanafseh, Mathieu Joerger, Fang Cheng-Chan and Boris Pervan Illinois Institute of Technology, Chicago, IL ABSTRACT
The IGS Real-time Pilot Project
 The IGS Real-time Pilot Project The Development of Real-time IGS Correction Products for Precise Point Positioning Mark Caissy, Georg Weber, Loukis Agrotis, Gerhard Wübbena, and Manuel Hernández-Pajares
The IGS Real-time Pilot Project The Development of Real-time IGS Correction Products for Precise Point Positioning Mark Caissy, Georg Weber, Loukis Agrotis, Gerhard Wübbena, and Manuel Hernández-Pajares
Positioning Techniques. João F. Galera Monico - UNESP Tuesday 12 Sep
 Positioning Techniques João F. Galera Monico - UNESP Tuesday 12 Sep Positioning methods Absolute Positioning Static and kinematic SPP and PPP Relative Positioning Static Static rapid Semi kinematic Kinematic
Positioning Techniques João F. Galera Monico - UNESP Tuesday 12 Sep Positioning methods Absolute Positioning Static and kinematic SPP and PPP Relative Positioning Static Static rapid Semi kinematic Kinematic
Status of ARAIM. S. Wallner ICG 6, Tokyo, Japan 05/09/2011. ESA UNCLASSIFIED For Official Use
 Status of ARAIM S. Wallner ICG 6, Tokyo, Japan 05/09/2011 ARAIM Concept Objectives Classical GPS RAIM for NPA used since years Evolving GNSS environment Multi-GNSS GPS/Galileo/Glonass/Compass/QZSS Dual-frequency
Status of ARAIM S. Wallner ICG 6, Tokyo, Japan 05/09/2011 ARAIM Concept Objectives Classical GPS RAIM for NPA used since years Evolving GNSS environment Multi-GNSS GPS/Galileo/Glonass/Compass/QZSS Dual-frequency
Precise Positioning... what does it mean? Precise GNSS Positioning Not just a niche technology. Chris Rizos 15/12/15
 Precise GNSS Positioning Not just a niche technology Chris Rizos Precise Positioning... what does it mean? 1 Precise Positioning... a spectrum of users... Few mm 1cm 2cm < dm 1dm sub-m Precision agriculture
Precise GNSS Positioning Not just a niche technology Chris Rizos Precise Positioning... what does it mean? 1 Precise Positioning... a spectrum of users... Few mm 1cm 2cm < dm 1dm sub-m Precision agriculture
INTEGRITY AND CONTINUITY ANALYSIS FROM GPS JANUARY TO MARCH 2017 QUARTERLY REPORT
 INTEGRITY AND CONTINUITY ANALYSIS FROM GPS JANUARY TO MARCH 2017 QUARTERLY REPORT Name Responsibility Date Signature Prepared by M Pattinson (NSL) 11/04/17 Checked by L Banfield (NSL) 11/04/17 Authorised
INTEGRITY AND CONTINUITY ANALYSIS FROM GPS JANUARY TO MARCH 2017 QUARTERLY REPORT Name Responsibility Date Signature Prepared by M Pattinson (NSL) 11/04/17 Checked by L Banfield (NSL) 11/04/17 Authorised
Asia Oceania Regional Workshop on GNSS Precise Point Positioning Experiment by using QZSS LEX
 Asia Oceania Regional Workshop on GNSS 2010 Precise Point Positioning Experiment by using QZSS LEX Tomoji TAKASU Tokyo University of Marine Science and Technology Contents Introduction of QZSS LEX Evaluation
Asia Oceania Regional Workshop on GNSS 2010 Precise Point Positioning Experiment by using QZSS LEX Tomoji TAKASU Tokyo University of Marine Science and Technology Contents Introduction of QZSS LEX Evaluation
DYNAMIC RT TECHNOLOGY
 DYNAMIC RT TECHNOLOGY GLOBAL NAVIGATION SATELLITE SYSTEMS (GNSS) POTENTIAL FUTURE DEVELOPMENTS(2005 2017?) GPS MODERNIZATION BLOCK IIF & III GLONASS ENHANCEMENTS (K & M) EUROPEAN UNION - GALILEO CHINA
DYNAMIC RT TECHNOLOGY GLOBAL NAVIGATION SATELLITE SYSTEMS (GNSS) POTENTIAL FUTURE DEVELOPMENTS(2005 2017?) GPS MODERNIZATION BLOCK IIF & III GLONASS ENHANCEMENTS (K & M) EUROPEAN UNION - GALILEO CHINA
Development of a GAST-D ground subsystem prototype and its performance evaluation with a long term-data set
 Development of a GAST-D ground subsystem prototype and its performance evaluation with a long term-data set T. Yoshihara, S. Saito, A. Kezuka, K. Hoshinoo, S. Fukushima, and S. Saitoh Electronic Navigation
Development of a GAST-D ground subsystem prototype and its performance evaluation with a long term-data set T. Yoshihara, S. Saito, A. Kezuka, K. Hoshinoo, S. Fukushima, and S. Saitoh Electronic Navigation
On Location at Stanford University
 Thank you for inviting me (back) to Deutsches Zentrum für Luft- und Raumfahrt On Location at Stanford University by Per Enge (with the help of many) July 27, 2009 My thanks to the Federal Aviation Administration
Thank you for inviting me (back) to Deutsches Zentrum für Luft- und Raumfahrt On Location at Stanford University by Per Enge (with the help of many) July 27, 2009 My thanks to the Federal Aviation Administration
GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE APRIL TO JUNE 2017 QUARTERLY REPORT
 PERFORMANCE APRIL TO JUNE 2017 QUARTERLY REPORT") GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE APRIL TO JUNE 2017 QUARTERLY REPORT Name Responsibility Date Signature Prepared by M Pattinson (NSL) 06/07/17 Checked by L Banfield (NSL) 06/07/17 Authorised
GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE APRIL TO JUNE 2017 QUARTERLY REPORT Name Responsibility Date Signature Prepared by M Pattinson (NSL) 06/07/17 Checked by L Banfield (NSL) 06/07/17 Authorised
GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE JANUARY TO MARCH 2016 QUARTERLY REPORT
 PERFORMANCE JANUARY TO MARCH 2016 QUARTERLY REPORT") GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE JANUARY TO MARCH 2016 QUARTERLY REPORT Name Responsibility Date Signature Prepared by M Pattinson (NSL) 22/04/16 Checked by L Banfield (NSL) 22/04/16 Authorised
GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE JANUARY TO MARCH 2016 QUARTERLY REPORT Name Responsibility Date Signature Prepared by M Pattinson (NSL) 22/04/16 Checked by L Banfield (NSL) 22/04/16 Authorised
One Source for Positioning Success
 novatel.com One Source for Positioning Success RTK, PPP, SBAS OR DGNSS. NOVATEL CORRECT OPTIMIZES ALL CORRECTION SOURCES, PUTTING MORE POWER, FLEXIBILITY AND CONTROL IN YOUR HANDS. NovAtel CORRECT is the
novatel.com One Source for Positioning Success RTK, PPP, SBAS OR DGNSS. NOVATEL CORRECT OPTIMIZES ALL CORRECTION SOURCES, PUTTING MORE POWER, FLEXIBILITY AND CONTROL IN YOUR HANDS. NovAtel CORRECT is the
Introduction to GNSS Base-Station
 Introduction to GNSS Base-Station Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 Introduction GPS or GNSS observation
Introduction to GNSS Base-Station Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 Introduction GPS or GNSS observation
HORIZONTAL ARAIM AVAILABILITY FOR CIVIL AVIATION OPERATIONS. ARAIM Outreach event
 HORIZONTAL ARAIM AVAILABILITY FOR CIVIL AVIATION OPERATIONS ARAIM Outreach event Moses1978 copyright April 7, 2017 H-ARAIM availability for civil aviation operations 07/04/2017 1 INTRODUCTION Space Segment
HORIZONTAL ARAIM AVAILABILITY FOR CIVIL AVIATION OPERATIONS ARAIM Outreach event Moses1978 copyright April 7, 2017 H-ARAIM availability for civil aviation operations 07/04/2017 1 INTRODUCTION Space Segment
The experimental evaluation of the EGNOS safety-of-life services for railway signalling
 Computers in Railways XII 735 The experimental evaluation of the EGNOS safety-of-life services for railway signalling A. Filip, L. Bažant & H. Mocek Railway Infrastructure Administration, LIS, Pardubice,
Computers in Railways XII 735 The experimental evaluation of the EGNOS safety-of-life services for railway signalling A. Filip, L. Bažant & H. Mocek Railway Infrastructure Administration, LIS, Pardubice,
The International Scene: How Precise Positioning Will Underpin Critical GNSS Applications
 The International Scene: How Precise Positioning Will Underpin Critical GNSS Applications School of Civil & Environmental Engineering, UNSW, Sydney, Australia Chris Rizos Member of the IGS Governing Board
The International Scene: How Precise Positioning Will Underpin Critical GNSS Applications School of Civil & Environmental Engineering, UNSW, Sydney, Australia Chris Rizos Member of the IGS Governing Board
Final Project Report. Abstract. Document information
 Final Project Report Document information Project Title Multi-constellation GNSS Airborne Navigation Systems Project Number 09.27 Project Manager Thales Avionics Deliverable Name Final Project Report Deliverable
Final Project Report Document information Project Title Multi-constellation GNSS Airborne Navigation Systems Project Number 09.27 Project Manager Thales Avionics Deliverable Name Final Project Report Deliverable
RAIM Availability prediction
 RAIM Availability prediction Main content 一 Background & research purposes 二 Related research in China and abroad 三 Theory and arithmetic 四 RAIM systems development 五 The vision of the future 1 Background
RAIM Availability prediction Main content 一 Background & research purposes 二 Related research in China and abroad 三 Theory and arithmetic 四 RAIM systems development 五 The vision of the future 1 Background
Kalman Filter Based Integer Ambiguity. Ionosphere and Troposphere Estimation
 ION GNSS 2010 Kalman Filter Based Integer Ambiguity Resolution Strategy t for Long Baseline RTK with Ionosphere and Troposphere Estimation Tokyo University of Marine Science and Technology Tomoji jitakasu
ION GNSS 2010 Kalman Filter Based Integer Ambiguity Resolution Strategy t for Long Baseline RTK with Ionosphere and Troposphere Estimation Tokyo University of Marine Science and Technology Tomoji jitakasu
Alberding solutions for GNSS infrastructure operators
 Tamás Horváth Alberding solutions for GNSS infrastructure operators 21.11.2017 1/35 Alberding solutions for GNSS infrastructure operators Tamás Horváth Alberding GmbH 4 th EUPOS Technical Meeting 21-22
Tamás Horváth Alberding solutions for GNSS infrastructure operators 21.11.2017 1/35 Alberding solutions for GNSS infrastructure operators Tamás Horváth Alberding GmbH 4 th EUPOS Technical Meeting 21-22
PPP with Ambiguity Resolution (AR) using RTCM-SSR
 using RTCM-SSR") PPP with Ambiguity Resolution (AR) using RTCM-SSR Gerhard Wübbena, Martin Schmitz, Andreas Bagge Geo++ GmbH 30827 Garbsen Germany www.geopp.de PPP with Ambiguity Resolution (AR) using RTCM-SSR Abstract
PPP with Ambiguity Resolution (AR) using RTCM-SSR Gerhard Wübbena, Martin Schmitz, Andreas Bagge Geo++ GmbH 30827 Garbsen Germany www.geopp.de PPP with Ambiguity Resolution (AR) using RTCM-SSR Abstract
On Location at Stanford University
 Thank you for inviting me to Calgary On Location at Stanford University by Per Enge (with the help of many) May 29, 2009 With Gratitude to the Federal Aviation Administration from Misra and Enge, 2006
Thank you for inviting me to Calgary On Location at Stanford University by Per Enge (with the help of many) May 29, 2009 With Gratitude to the Federal Aviation Administration from Misra and Enge, 2006
Sogei R&D for GNSS Institutional Application Development
 Sogei R&D for GNSS Institutional Application Development The content of the document, including all the information, data, communications, code, graphics, text, tables, images, photos, videos, music, drawings,
Sogei R&D for GNSS Institutional Application Development The content of the document, including all the information, data, communications, code, graphics, text, tables, images, photos, videos, music, drawings,
Integrity of Satellite Navigation in the Arctic
 Integrity of Satellite Navigation in the Arctic TODD WALTER & TYLER REID STANFORD UNIVERSITY APRIL 2018 Satellite Based Augmentation Systems (SBAS) in 2018 2 SBAS Networks in 2021? 3 What is Meant by Integrity?
Integrity of Satellite Navigation in the Arctic TODD WALTER & TYLER REID STANFORD UNIVERSITY APRIL 2018 Satellite Based Augmentation Systems (SBAS) in 2018 2 SBAS Networks in 2021? 3 What is Meant by Integrity?
Development of Multi-GNSS Orbit and Clock Determination Software "MADOCA"
 The 5th Asia Oceania Regional Workshop on GNSS Development of Multi-GNSS Orbit and Clock Determination Software "MADOCA" Tokyo Univ. of Marine Science and Technology Tomoji TAKASU December 1-3, 2013 @Hanoi
The 5th Asia Oceania Regional Workshop on GNSS Development of Multi-GNSS Orbit and Clock Determination Software "MADOCA" Tokyo Univ. of Marine Science and Technology Tomoji TAKASU December 1-3, 2013 @Hanoi
Performance Evaluation of Differential Global Navigation Satellite System with RTK Corrections
 IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p- ISSN: 2278-8735.Volume 9, Issue 2, Ver. VI (Mar - Apr. 2014), PP 43-47 Performance Evaluation of Differential
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p- ISSN: 2278-8735.Volume 9, Issue 2, Ver. VI (Mar - Apr. 2014), PP 43-47 Performance Evaluation of Differential
GNSS MONITORING NETWORKS
 SPACE GNSS MONITORING NETWORKS Satellite communications, earth observation, navigation and positioning and control stations indracompany.com GNSS MONITORING NETWORKS GNSS MONITORING NETWORKS Indra s solutions
SPACE GNSS MONITORING NETWORKS Satellite communications, earth observation, navigation and positioning and control stations indracompany.com GNSS MONITORING NETWORKS GNSS MONITORING NETWORKS Indra s solutions
Trimble Business Center:
 Trimble Business Center: Modernized Approaches for GNSS Baseline Processing Trimble s industry-leading software includes a new dedicated processor for static baselines. The software features dynamic selection
Trimble Business Center: Modernized Approaches for GNSS Baseline Processing Trimble s industry-leading software includes a new dedicated processor for static baselines. The software features dynamic selection
Near Term Improvements to WAAS Availability
 Near Term Improvements to WAAS Availability Juan Blanch, Todd Walter, R. Eric Phelts, Per Enge Stanford University ABSTRACT Since 2003, when it was first declared operational, the Wide Area Augmentation
Near Term Improvements to WAAS Availability Juan Blanch, Todd Walter, R. Eric Phelts, Per Enge Stanford University ABSTRACT Since 2003, when it was first declared operational, the Wide Area Augmentation
Introduction to DGNSS
 Introduction to DGNSS Jaume Sanz Subirana J. Miguel Juan Zornoza Research group of Astronomy & Geomatics (gage) Technical University of Catalunya (UPC), Spain. Web site: http://www.gage.upc.edu Hanoi,
Introduction to DGNSS Jaume Sanz Subirana J. Miguel Juan Zornoza Research group of Astronomy & Geomatics (gage) Technical University of Catalunya (UPC), Spain. Web site: http://www.gage.upc.edu Hanoi,
Integer Ambiguity Resolution for Precise Point Positioning Patrick Henkel
 Integer Ambiguity Resolution for Precise Point Positioning Patrick Henkel Overview Introduction Sequential Best-Integer Equivariant Estimation Multi-frequency code carrier linear combinations Galileo:
Integer Ambiguity Resolution for Precise Point Positioning Patrick Henkel Overview Introduction Sequential Best-Integer Equivariant Estimation Multi-frequency code carrier linear combinations Galileo:
EUROPEAN GNSS ADOPTION OPPORTUNITIES IN TRANSPORT WITH FOCUS ON RAIL
 EUROPEAN GNSS ADOPTION OPPORTUNITIES IN TRANSPORT WITH FOCUS ON RAIL Gian Gherardo Calini European GNSS Agency III Workshop GNSS Technology Advances in a Multi-Constellation Framework 22 January 2016 This
EUROPEAN GNSS ADOPTION OPPORTUNITIES IN TRANSPORT WITH FOCUS ON RAIL Gian Gherardo Calini European GNSS Agency III Workshop GNSS Technology Advances in a Multi-Constellation Framework 22 January 2016 This
Resilient PNT: From PNT-Unit concept to first realization
 www.dlr.de Chart 1 >Resilient PNT: From PNT Unit concept to first realization> R. Ziebold > e-navigation Underway 1/3/213 Resilient PNT: From PNT-Unit concept to first realization Ralf Ziebold, Z. Dai,
www.dlr.de Chart 1 >Resilient PNT: From PNT Unit concept to first realization> R. Ziebold > e-navigation Underway 1/3/213 Resilient PNT: From PNT-Unit concept to first realization Ralf Ziebold, Z. Dai,
High Precision GNSS in Automotive
 High Precision GNSS in Automotive Jonathan Auld, VP Engineering and Safety 6, March, 2018 2 Global OEM Positioning Solutions and Services for Land, Sea, and Air. GNSS in Automotive Today Today the primary
High Precision GNSS in Automotive Jonathan Auld, VP Engineering and Safety 6, March, 2018 2 Global OEM Positioning Solutions and Services for Land, Sea, and Air. GNSS in Automotive Today Today the primary
EGNOS status and performance in the context of marine navigation requirements
 EGNOS status and performance in the context of marine navigation requirements J. Cydejko Gdynia Maritime University, Gdynia, Poland ABSTRACT: The current status of EGNOS (December 2006) is described as
EGNOS status and performance in the context of marine navigation requirements J. Cydejko Gdynia Maritime University, Gdynia, Poland ABSTRACT: The current status of EGNOS (December 2006) is described as
FieldGenius Technical Notes GPS Terminology
 FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
Distributed integrity monitoring of differential GPS corrections
 Distributed integrity monitoring of differential GPS corrections by Martin Pettersson Supervised by Fredrik Gustafsson Niclas Bergman Department of Automatic Control University of Linköpings Made for Luftfartsverket
Distributed integrity monitoring of differential GPS corrections by Martin Pettersson Supervised by Fredrik Gustafsson Niclas Bergman Department of Automatic Control University of Linköpings Made for Luftfartsverket
Satellite Navigation Integrity and integer ambiguity resolution
 Satellite Navigation Integrity and integer ambiguity resolution Picture: ESA AE4E08 Sandra Verhagen Course 2010 2011, lecture 12 1 Today s topics Integrity and RAIM Integer Ambiguity Resolution Study Section
Satellite Navigation Integrity and integer ambiguity resolution Picture: ESA AE4E08 Sandra Verhagen Course 2010 2011, lecture 12 1 Today s topics Integrity and RAIM Integer Ambiguity Resolution Study Section
GNSS Integrity Monitoring
 www.dlr.de Chart 1 GNSS Integrity Monitoring Martini - Rome, 22 June 2017 GNSS Integrity Monitoring Dr. Ilaria Martini Institute of Communications and Navigation German Aerospace Center Rome, 22.06.2017
www.dlr.de Chart 1 GNSS Integrity Monitoring Martini - Rome, 22 June 2017 GNSS Integrity Monitoring Dr. Ilaria Martini Institute of Communications and Navigation German Aerospace Center Rome, 22.06.2017
EGNOS/EDAS based solution for the French DGPS network. Author: Etienne LEROY
 EGNOS/EDAS based solution for the French DGPS network. Author: Etienne LEROY Date 04/10/2017 1.Context 2.EDAS Centralized based architecture 3.Software and devices 4.Test Campaign 5.Cost based analysis
EGNOS/EDAS based solution for the French DGPS network. Author: Etienne LEROY Date 04/10/2017 1.Context 2.EDAS Centralized based architecture 3.Software and devices 4.Test Campaign 5.Cost based analysis
Real-time challenges of an. Australian National Positioning Infrastructure
 Real-time challenges of an Australian National Positioning Infrastructure S. Melachroinos 1, T. Li 2,1, T. Papanikolaou 2,1, and J. Dawson 1 1 Geoscience Australia Geodesy Section GSM Group CSEM Division
Real-time challenges of an Australian National Positioning Infrastructure S. Melachroinos 1, T. Li 2,1, T. Papanikolaou 2,1, and J. Dawson 1 1 Geoscience Australia Geodesy Section GSM Group CSEM Division
Trustworthy Positioning for Next Generation Intelligent Transport Systems Ahmed El-Mowafy
 Trustworthy Positioning for Next Generation Intelligent Transport Systems Ahmed El-Mowafy Contents Background on ITS and C-ITS Requirements Challenges RAIM Test and Results Utilisation Workshop, Sydney,
Trustworthy Positioning for Next Generation Intelligent Transport Systems Ahmed El-Mowafy Contents Background on ITS and C-ITS Requirements Challenges RAIM Test and Results Utilisation Workshop, Sydney,
ARAIM: Utilization of Modernized GNSS for Aircraft-Based Navigation Integrity
 ARAIM: Utilization of Modernized GNSS for Aircraft-Based Navigation Integrity Alexandru (Ene) Spletter Deutsches Zentrum für Luft- und Raumfahrt (DLR), e.v. The author gratefully acknowledges the support
ARAIM: Utilization of Modernized GNSS for Aircraft-Based Navigation Integrity Alexandru (Ene) Spletter Deutsches Zentrum für Luft- und Raumfahrt (DLR), e.v. The author gratefully acknowledges the support
Lessons Learned During the Development of GNSS Integrity Monitoring and Verification Techniques for Aviation Users
 Lessons Learned During the Development of GNSS Integrity Monitoring and Verification Techniques for Aviation Users Sam Pullen Stanford University spullen@stanford.edu ITSNT Symposium 16 November 2016 Toulouse,
Lessons Learned During the Development of GNSS Integrity Monitoring and Verification Techniques for Aviation Users Sam Pullen Stanford University spullen@stanford.edu ITSNT Symposium 16 November 2016 Toulouse,
Understanding GPS/GNSS
 Understanding GPS/GNSS Principles and Applications Third Edition Contents Preface to the Third Edition Third Edition Acknowledgments xix xxi CHAPTER 1 Introduction 1 1.1 Introduction 1 1.2 GNSS Overview
Understanding GPS/GNSS Principles and Applications Third Edition Contents Preface to the Third Edition Third Edition Acknowledgments xix xxi CHAPTER 1 Introduction 1 1.1 Introduction 1 1.2 GNSS Overview
GSA GNSS Technology Report Main highlights IPIN 2018
 GSA GNSS Technology Report Main highlights IPIN 2018 Justyna Redelkiewicz, European GNSS Agency 25 September 2018, Nantes The European GNSS Agency (GSA) is responsible for market development and operations
GSA GNSS Technology Report Main highlights IPIN 2018 Justyna Redelkiewicz, European GNSS Agency 25 September 2018, Nantes The European GNSS Agency (GSA) is responsible for market development and operations
Demonstrations of Multi-Constellation Advanced RAIM for Vertical Guidance using GPS and GLONASS Signals
 Demonstrations of Multi-Constellation Advanced RAIM for Vertical Guidance using GPS and GLONASS Signals Myungjun Choi, Juan Blanch, Stanford University Dennis Akos, University of Colorado Boulder Liang
Demonstrations of Multi-Constellation Advanced RAIM for Vertical Guidance using GPS and GLONASS Signals Myungjun Choi, Juan Blanch, Stanford University Dennis Akos, University of Colorado Boulder Liang
Multisystem Real Time Precise-Point-Positioning, today with GPS+GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS
 2 International Symposium on /GNSS October 26-28, 2. Multisystem Real Time Precise-Point-Positioning, today with +GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS Álvaro Mozo García,
2 International Symposium on /GNSS October 26-28, 2. Multisystem Real Time Precise-Point-Positioning, today with +GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS Álvaro Mozo García,
QZSS and LEX Signal. Performance of Real-Time Precise Point Positioning Using MADOCA-LEX Augmentation Messages. Outline
 Performance of Real-Time Precise Point Positioning Using MADOCA-LEX Augmentation Messages Suelynn Choy 1, Ken Harima 1, Mohammad Choudhury 2, Yong Li 2, Yaka Wakabayashi 3, Thomas Grinter 4, Satoshi Kogure
Performance of Real-Time Precise Point Positioning Using MADOCA-LEX Augmentation Messages Suelynn Choy 1, Ken Harima 1, Mohammad Choudhury 2, Yong Li 2, Yaka Wakabayashi 3, Thomas Grinter 4, Satoshi Kogure
Understanding GPS: Principles and Applications Second Edition
 Understanding GPS: Principles and Applications Second Edition Elliott Kaplan and Christopher Hegarty ISBN 1-58053-894-0 Approx. 680 pages Navtech Part #1024 This thoroughly updated second edition of an
Understanding GPS: Principles and Applications Second Edition Elliott Kaplan and Christopher Hegarty ISBN 1-58053-894-0 Approx. 680 pages Navtech Part #1024 This thoroughly updated second edition of an
GNSS Signal Structures
 GNSS Signal Structures Tom Stansell Stansell Consulting Tom@Stansell.com Bangkok, Thailand 23 January 2018 S t a n s e l l C o n s u l t i n g RL Introduction It s a pleasure to speak with you this morning.
GNSS Signal Structures Tom Stansell Stansell Consulting Tom@Stansell.com Bangkok, Thailand 23 January 2018 S t a n s e l l C o n s u l t i n g RL Introduction It s a pleasure to speak with you this morning.
GNSS Technologies. PPP and RTK
 PPP and RTK 29.02.2016 Content Carrier phase based positioning PPP RTK VRS Slides based on: GNSS Applications and Methods, by S. Gleason and D. Gebre-Egziabher (Eds.), Artech House Inc., 2009 http://www.gnssapplications.org/
PPP and RTK 29.02.2016 Content Carrier phase based positioning PPP RTK VRS Slides based on: GNSS Applications and Methods, by S. Gleason and D. Gebre-Egziabher (Eds.), Artech House Inc., 2009 http://www.gnssapplications.org/
Galileo Integrity Concept user level
 Galileo Integrity Concept user level Presented at The Technical Universtiy of Munich Andrew Simsky, Frank Boon GPS integrity provided by SBAS (1/2) WAAS/EGNOS define Safety-Of-Life on top of GPS RTCA DO229
Galileo Integrity Concept user level Presented at The Technical Universtiy of Munich Andrew Simsky, Frank Boon GPS integrity provided by SBAS (1/2) WAAS/EGNOS define Safety-Of-Life on top of GPS RTCA DO229
Webinar. 9 things you should know about centimeter-level GNSS accuracy
 Webinar 9 things you should know about centimeter-level GNSS accuracy Webinar agenda 9 things you should know about centimeter-level GNSS accuracy 1. High precision GNSS challenges 2. u-blox F9 technology
Webinar 9 things you should know about centimeter-level GNSS accuracy Webinar agenda 9 things you should know about centimeter-level GNSS accuracy 1. High precision GNSS challenges 2. u-blox F9 technology
RTCM Not for reproduction or redistribution
 RTCM Paper 177-2006-SC104-STD RTCM STANDARD 10403.1 FOR DIFFERENTIAL GNSS (GLOBAL NAVIGATION SATELLITE SYSTEMS) SERVICES VERSION 3 DEVELOPED BY RTCM SPECIAL COMMITTEE NO. 104 OCTOBER 27, 2006 COPYRIGHT
RTCM Paper 177-2006-SC104-STD RTCM STANDARD 10403.1 FOR DIFFERENTIAL GNSS (GLOBAL NAVIGATION SATELLITE SYSTEMS) SERVICES VERSION 3 DEVELOPED BY RTCM SPECIAL COMMITTEE NO. 104 OCTOBER 27, 2006 COPYRIGHT
GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE OCTOBER TO DECEMBER 2013 QUARTERLY REPORT. GPS Performance 08/01/14 08/01/14 08/01/14.
 PERFORMANCE OCTOBER TO DECEMBER 2013 QUARTERLY REPORT. GPS Performance 08/01/14 08/01/14 08/01/14.") GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE OCTOBER TO DECEMBER 2013 QUARTERLY REPORT Prepared by: M Pattinson (NSL) 08/01/14 Checked by: L Banfield (NSL) 08/01/14 Approved by: M Dumville (NSL) 08/01/14
GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE OCTOBER TO DECEMBER 2013 QUARTERLY REPORT Prepared by: M Pattinson (NSL) 08/01/14 Checked by: L Banfield (NSL) 08/01/14 Approved by: M Dumville (NSL) 08/01/14
On Location at Stanford University
 Thank you for inviting me (back) to Southern California On Location at Stanford University by Per Enge (with the help of many) June 30, 2009 My thanks to the Federal Aviation Administration Outline Landing
Thank you for inviting me (back) to Southern California On Location at Stanford University by Per Enge (with the help of many) June 30, 2009 My thanks to the Federal Aviation Administration Outline Landing
Comparative analysis of GNSS Real Time Kinematic methods for navigation
 IAV Hassan II Comparative analysis of GNSS Real Time Kinematic methods for navigation Mourad BOUZIANI School of Geomatic Sciences, IAV Hassan II, Rabat, Morocco. Coordinator of the Master - GNSS, IAV&
IAV Hassan II Comparative analysis of GNSS Real Time Kinematic methods for navigation Mourad BOUZIANI School of Geomatic Sciences, IAV Hassan II, Rabat, Morocco. Coordinator of the Master - GNSS, IAV&
Several ground-based augmentation system (GBAS) Galileo E1 and E5a Performance
 Galileo E1 and E5a Performance") » COVER STORY Galileo E1 and E5a Performance For Multi-Frequency, Multi-Constellation GBAS Analysis of new Galileo signals at an experimental ground-based augmentation system (GBAS) compares noise and
» COVER STORY Galileo E1 and E5a Performance For Multi-Frequency, Multi-Constellation GBAS Analysis of new Galileo signals at an experimental ground-based augmentation system (GBAS) compares noise and
Satellite Navigation Science and Technology for Africa. 23 March - 9 April, Air Navigation Applications (SBAS, GBAS, RAIM)
") 2025-25 Satellite Navigation Science and Technology for Africa 23 March - 9 April, 2009 Air Navigation Applications (SBAS, GBAS, RAIM) Walter Todd Stanford University Department of Applied Physics CA 94305-4090
2025-25 Satellite Navigation Science and Technology for Africa 23 March - 9 April, 2009 Air Navigation Applications (SBAS, GBAS, RAIM) Walter Todd Stanford University Department of Applied Physics CA 94305-4090
The Reasons to Succeed or to Fail a GNSS Network RTK Project
 The Reasons to Succeed or to Fail a GNSS Network RTK Project Joël van Cranenbroeck, Managing Director CGEOS Creative Geosensing sprl-s, Belgium Andy Yin, International Sales Director ComNav Technology
The Reasons to Succeed or to Fail a GNSS Network RTK Project Joël van Cranenbroeck, Managing Director CGEOS Creative Geosensing sprl-s, Belgium Andy Yin, International Sales Director ComNav Technology
Report of Working Group B: Enhancement of Global Navigation Satellite Systems Services Performance
 Report of : Enhancement of Global Navigation Satellite Systems Services Performance 1. The Working Group on Enhancement of Global Navigation Satellite Systems (GNSS) Service Performance (WG-B) of the International
Report of : Enhancement of Global Navigation Satellite Systems Services Performance 1. The Working Group on Enhancement of Global Navigation Satellite Systems (GNSS) Service Performance (WG-B) of the International
Global Correction Services for GNSS
 Global Correction Services for GNSS Hemisphere GNSS Whitepaper September 5, 2015 Overview Since the early days of GPS, new industries emerged while existing industries evolved to use position data in real-time.
Global Correction Services for GNSS Hemisphere GNSS Whitepaper September 5, 2015 Overview Since the early days of GPS, new industries emerged while existing industries evolved to use position data in real-time.
Quasi-Zenith Satellite System (QZSS)
") Transmission of Augmentation Corrections using the Japanese QZSS for Real-Time Precise Point Positioning in Australia Ken Harima 1, Suelynn Choy 1, Mazher Choudhury 2, Chris Rizos 2, Satoshi Kogure 3 1
Transmission of Augmentation Corrections using the Japanese QZSS for Real-Time Precise Point Positioning in Australia Ken Harima 1, Suelynn Choy 1, Mazher Choudhury 2, Chris Rizos 2, Satoshi Kogure 3 1
Monitoring the EGNOS SYSTEM TEST BED at the Radio Navigation Experimentation Unit (RNEU)
") Monitoring the EGNOS SYSTEM TEST BED at the Radio Navigation Experimentation Unit (RNEU) ESTEC/ESA 2nd ESTB Workshop, Nice, 12th November 2001 What is the RNEU? Specialised facilities located at ESTEC/TOS-ET
Monitoring the EGNOS SYSTEM TEST BED at the Radio Navigation Experimentation Unit (RNEU) ESTEC/ESA 2nd ESTB Workshop, Nice, 12th November 2001 What is the RNEU? Specialised facilities located at ESTEC/TOS-ET
GALILEO Research and Development Activities. Second Call. Area 1A. Statement of Work
 GALILEO Research and Development Activities Second Call Area 1A GNSS Introduction in the Maritime Sector Statement of Work Rue du Luxembourg, 3 B 1000 Brussels Tel +32 2 507 80 00 Fax +32 2 507 80 01 www.galileoju.com
GALILEO Research and Development Activities Second Call Area 1A GNSS Introduction in the Maritime Sector Statement of Work Rue du Luxembourg, 3 B 1000 Brussels Tel +32 2 507 80 00 Fax +32 2 507 80 01 www.galileoju.com
Validation of Multiple Hypothesis RAIM Algorithm Using Dual-frequency GNSS Signals
 Validation of Multiple Hypothesis RAIM Algorithm Using Dual-frequency GNSS Signals Alexandru Ene, Juan Blanch, Todd Walter, J. David Powell Stanford University, Stanford CA, USA BIOGRAPHY Alexandru Ene
Validation of Multiple Hypothesis RAIM Algorithm Using Dual-frequency GNSS Signals Alexandru Ene, Juan Blanch, Todd Walter, J. David Powell Stanford University, Stanford CA, USA BIOGRAPHY Alexandru Ene
Horizontal Advanced RAIM: Operational Benefits and Future Challenges
 Horizontal Advanced RAIM: Operational Benefits and Future Challenges International Technical Symposium on Navigation and Timing 2015 Session Air Navigation November 2015 Toulouse/France 1 ICAO ABAS augmentation
Horizontal Advanced RAIM: Operational Benefits and Future Challenges International Technical Symposium on Navigation and Timing 2015 Session Air Navigation November 2015 Toulouse/France 1 ICAO ABAS augmentation
SBAS solution GCC, Yemen and Iraq System baseline and performance
 SBAS solution GCC, Yemen and Iraq System baseline and performance ACAC Workshop Rabat 7 & 8 November 2017 1 2017 Thales Alenia Space PROPRIETARY C O M MINFORMATION E R C I A L I N THALES C O ALENIA N F
SBAS solution GCC, Yemen and Iraq System baseline and performance ACAC Workshop Rabat 7 & 8 November 2017 1 2017 Thales Alenia Space PROPRIETARY C O M MINFORMATION E R C I A L I N THALES C O ALENIA N F
Report of the Working Group B: Enhancement of Global Navigation Satellite Systems (GNSS) Services Performance
 Services Performance") Report of the Working Group B: Enhancement of Global Navigation Satellite Systems (GNSS) Services Performance 1. The Working Group on Enhancement of Global Navigation Satellite Systems (GNSS) Service Performance
Report of the Working Group B: Enhancement of Global Navigation Satellite Systems (GNSS) Services Performance 1. The Working Group on Enhancement of Global Navigation Satellite Systems (GNSS) Service Performance
Generation of Consistent GNSS SSR Corrections
 Generation of Consistent GNSS SSR Corrections for Distributed CORS Networks Jannes Wübbena, Martin Schmitz, Gerhard Wübbena Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Abstract Generation of Consistent
Generation of Consistent GNSS SSR Corrections for Distributed CORS Networks Jannes Wübbena, Martin Schmitz, Gerhard Wübbena Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Abstract Generation of Consistent
Challenges and Methods for Integrity Assurance in Future GNSS
 Challenges and Methods for Integrity Assurance in Future GNSS Igor Mozharov Division Head, Information and Analytical Center for PNT, Central Research Institute for Machine Building, Roscosmos igor.mozharov@mcc.rsa.ru
Challenges and Methods for Integrity Assurance in Future GNSS Igor Mozharov Division Head, Information and Analytical Center for PNT, Central Research Institute for Machine Building, Roscosmos igor.mozharov@mcc.rsa.ru
Technical Specifications Document. for. Satellite-Based Augmentation System (SBAS) Testbed
 Testbed") Technical Specifications Document for Satellite-Based Augmentation System (SBAS) Testbed Revision 3 13 June 2017 Table of Contents Acronym Definitions... 3 1. Introduction... 4 2. SBAS Testbed Realisation...
Technical Specifications Document for Satellite-Based Augmentation System (SBAS) Testbed Revision 3 13 June 2017 Table of Contents Acronym Definitions... 3 1. Introduction... 4 2. SBAS Testbed Realisation...
A new Modular and Open Concept for the Maritime Integrated PNT System
 A new Modular and Open Concept for the Maritime Integrated PNT System T. Noack German Aerospace Center Institute of Communications and Navigation www.dlr.de Chart 2 MTS-2012 Maritime Integrated PNT Unit
A new Modular and Open Concept for the Maritime Integrated PNT System T. Noack German Aerospace Center Institute of Communications and Navigation www.dlr.de Chart 2 MTS-2012 Maritime Integrated PNT Unit
Real-Time and Multi-GNSS Key Projects of the International GNSS Service
 Real-Time and Multi-GNSS Key Projects of the International GNSS Service Urs Hugentobler, Chris Rizos, Mark Caissy, Georg Weber, Oliver Montenbruck, Ruth Neilan EUREF 2013 Symposium Budapest, Hungary, May
Real-Time and Multi-GNSS Key Projects of the International GNSS Service Urs Hugentobler, Chris Rizos, Mark Caissy, Georg Weber, Oliver Montenbruck, Ruth Neilan EUREF 2013 Symposium Budapest, Hungary, May
GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE JANUARY TO MARCH 2017 QUARTERLY REPORT
 PERFORMANCE JANUARY TO MARCH 2017 QUARTERLY REPORT") GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE JANUARY TO MARCH 2017 QUARTERLY REPORT Name Responsibility Date Signature Prepared by M Pattinson (NSL) 11/04/17 Checked by L Banfield (NSL) 11/04/17 Authorised
GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE JANUARY TO MARCH 2017 QUARTERLY REPORT Name Responsibility Date Signature Prepared by M Pattinson (NSL) 11/04/17 Checked by L Banfield (NSL) 11/04/17 Authorised
Analysis of GNSS Receiver Biases and Noise using Zero Baseline Techniques
 1 Analysis of GNSS Receiver Biases and Noise using Zero Baseline Techniques Ken MacLeod, Simon Banville, Reza Ghoddousi-Fard and Paul Collins Canadian Geodetic Survey, Natural Resources Canada Plenary
1 Analysis of GNSS Receiver Biases and Noise using Zero Baseline Techniques Ken MacLeod, Simon Banville, Reza Ghoddousi-Fard and Paul Collins Canadian Geodetic Survey, Natural Resources Canada Plenary
What to Expect with the Current Constellation
 FIGURE 1 Galileo constellation and occupation status of orbital slots (RAAN: right ascension of the ascending node, May 9, 2017). Source: ESA HOW GALILEO BENEFITS HIGH-PRECISION RTK What to Expect with
FIGURE 1 Galileo constellation and occupation status of orbital slots (RAAN: right ascension of the ascending node, May 9, 2017). Source: ESA HOW GALILEO BENEFITS HIGH-PRECISION RTK What to Expect with
Development of an Open Source Multi GNSS Data Processing Software
 2nd Asia Oceania Regional Workshop on GNSS 2010 Development of an Open Source Multi GNSS Data Processing Software Tomoji TAKASU Tokyo University of Marine Science and Technology Contents Introduction Issues
2nd Asia Oceania Regional Workshop on GNSS 2010 Development of an Open Source Multi GNSS Data Processing Software Tomoji TAKASU Tokyo University of Marine Science and Technology Contents Introduction Issues
GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE JULY TO SEPTEMBER 2018 QUARTERLY REPORT 3
 PERFORMANCE JULY TO SEPTEMBER 2018 QUARTERLY REPORT 3") GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE JULY TO SEPTEMBER 2018 QUARTERLY REPORT 3 Name Responsibility Date Signature Prepared by M McCreadie (NSL) 24/10/2018 Checked by M Pattinson (NSL) 24/10/2018
GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE JULY TO SEPTEMBER 2018 QUARTERLY REPORT 3 Name Responsibility Date Signature Prepared by M McCreadie (NSL) 24/10/2018 Checked by M Pattinson (NSL) 24/10/2018
Piksi Multi Settings. 1 Introduction. Firmware Version v1.0.11
 Firmware Version v1.0.11 1 Introduction Piksi Multi has a number of settings that can be controlled by the end user via the provided Piksi Console or through the SBP binary message protocol. This Document
Firmware Version v1.0.11 1 Introduction Piksi Multi has a number of settings that can be controlled by the end user via the provided Piksi Console or through the SBP binary message protocol. This Document
Korean WA-DGNSS User Segment Software Design
 http://www.transnav.eu the International Journal on Marine Navigation and Safet of Sea Transportation Volume 7 Number 1 March 2013 DOI: 10.12716/1001.07.01.08 Korean WA-DGNSS User Segment Software Design
http://www.transnav.eu the International Journal on Marine Navigation and Safet of Sea Transportation Volume 7 Number 1 March 2013 DOI: 10.12716/1001.07.01.08 Korean WA-DGNSS User Segment Software Design