LiDAR. Norbert Pfeifer. Institute of Photogrammetry and Remote Sensing (I.P.F.) Vienna University of Technology, Austria
|
|
|
- Cora Shepherd
- 6 years ago
- Views:
Transcription

1 LiDAR Norbert Pfeifer Institute of Photogrammetry and Remote Sensing (I.P.F.) Vienna University of Technology, Austria
2 Terms involving Laser Scanning (LS) LASER = Light Amplification by Stimulated Emission of Radiation LIDAR = Light Detection and Ranging (LADAR = Laser Detection and Ranging ) Static Laser Ranging = static LIDAR Kinematic Laser Ranging = Laser Profiling = along track LIDAR Static Laser Scanning / Scanning LIDAR Kinematic Laser Scanning / Scanning LIDAR = along and across track LIDAR LS on different platforms Static mode Terrestrial Laser Scanning (TLS) Kinematic mode Airborne Laser Scanning (ALS) Satellite Laser Ranging (SLR) Mobile Laser Scanning (ground based) 2
3 What this lecture is (not) about This lecture is about LiDAR and LRF. This lecture is not about Laser Scanning. In this lecture LiDAR is embedded into the context of laser scanning topographic situations.
4 Physical principles, motivation LRF: Laser Range Finding Active distance measurement: sensor-object-sensor Possible for none cooperative targets, resp. reflectorless ranging (without prisms) Laser technology is highly developed, therefore there exists the possibility to select an appropriate wavelength Pairing of wavelength and detector (green/red-nir) Strongly focused beam (compare with radar) In more general terms Study of an object by emitting a certain amount of laser energy and by the analysis of the backscattered energy (range, amplitude, etc.) LIDAR = Light Identification Detection Analysis and Ranging (R. Measures) 4
.")
5 Laser principle Laser = Light Amplification by Stimulated Emission of Radiation (Neodymium: Yttrium Aluminum Garnet) Output is a beam of light (highly monochromatic, coherent and small beam width). Light is diffusely reflected on object some energy returns to sender measure distance to object d = t/2*c (Distance = time of flight (one way) * speed of light) To measure more than one distance pulses instead of one beam (e.g. by Q- switching; i.e. resonator is turned down while pumping) 5
6 Pulsed Lasers time Laser pulses can be generated by various methods (gain-switching, Q- switching, mode-locking) Typical pulse duration in ALS 2 ns 10 ns 60 cm 3 m pulse length Source: Wagner et al, IAPRS XXX,
7 Pulsed Lasers Pulse Repetition Rate (PRR) Pulse Repetition Frequency (PRF) number of emitted pulses per second Typical values in ALS: khz Example: PRR 100 khz Time between two pulses: 1/100k s = 10-5 s = 0.01 ms Distance between two pulses is 3*10 8 * 10-5 = 3000 m; while flying 1500m above the ground only one pulse is in the air. e.g. PRR = 100 khz, pulse width = 10ns ( 3m) 0.01 ms 10 ns time 7
 0.7 μm 2.5 μm (near IR), e.g. 1.5 µm, 1064 nm http://en.")
, e.g. 690 nm, 532 nm ultraviolet otherwise: absorption by water vapor, CO 2, O 3, 8")
8 Choice of wavelength (λ) λ dependent on laser medium and atmospheric windows: 8 μm 14 μm 3 μm 5 μm (mid IR) 0.7 μm 2.5 μm (near IR), e.g. 1.5 µm, 1064 nm nm 700 nm (visible), e.g. 690 nm, 532 nm ultraviolet otherwise: absorption by water vapor, CO 2, O 3, 8
9 Laser Wavelengths Reflectivity (in %) of water, dry soil, and vegetation Wavelength in use adapted to observed objects (e.g. vegetation and soil) No returns from water different wave length required for bathymetry (usually green lasers) 9
 94% Snow 80-90% Beer foam 88% White masonry 85% Limestone, clay up to 75% Newspaper with print 69% Tissue paper,")
10 Reflection coefficient for different materials values for 900nm, averaged over typical incidence angles Reflection coefficitent ρ depends in general on material reflectivity and angle of incident radiation and view point White paper up to 100% Dimension lumber (pine, clean, dry) 94% Snow 80-90% Beer foam 88% White masonry 85% Limestone, clay up to 75% Newspaper with print 69% Tissue paper, two ply 60% Deciduous trees typ. 60% Coniferous trees typ. 30% Carbonate sand (dry) 57% Carbonate sand (wet) 41% Beach sands, bare areas in dessert typ. 50% Rough wood pallet (clean) 25% Concrete, smooth 24% Asphalt with pebbles 17% Lava 8% Black neoprene 5% Black rubber tire wall 2% Source: Riegl 10
 Energy drop to 1/e 2 Alternatively: Energy drop to 1/e, Beam radius expansion w(z) = w 0 (1+(λz/(πw 02 )) 2 ) ½ Divergence β (full angle, beam width 1/e 2 ) is β = 4/π λ/d D = 2w 0")
11 Laser beam width Beam widens due to diffraction and optical elements Beam waist (smallest diameter) w 0 Definition of beam width for beams with decreasing energy distribution from the center outwards (Gaussian beams) Energy drop to 1/e 2 Alternatively: Energy drop to 1/e, Beam radius expansion w(z) = w 0 (1+(λz/(πw 02 )) 2 ) ½ Divergence β (full angle, beam width 1/e 2 ) is β = 4/π λ/d D = 2w 0 Aperture [Jelalian 1992; Young 2000] typical values: < 1 mrad D 1 beam width β 1/e 2 lateral energy distribution r w(z) z Energy Link: near field far field 11
 Approximately Gaussian (Jutzi et al.")
 Approximately Gaussian Riegl -Puls,")
 Beam divergence Diffraction, β λ/d Energy")
12 Energy distribution Energy distribution across (in area) Approximately Gaussian (Jutzi et al., 2003, wavelength 1543nm) Energy distribution along (in time) Approximately Gaussian Riegl -Puls, wavelength 1.5µm (Wagner et al., 2004) Beam divergence Diffraction, β λ/d Energy distributed in time and in area but concentrated in center. 12

![T [W] Equally distributed along a sphere [m -2 ] Antenna gain](/docs-images/77/75204576/images/13-1.jpg "(opening angle in respect to the sphere) β [],db Area A of")
![target [m 2 ] and with reflection coef.](/docs-images/77/75204576/images/13-2.jpg "ρ Equally distributed backscatter along a sphere [m -2 ]")

13 Laser equation P P 4πR 4π π β 1 4πR 4π Ω πd 4 2 T R = A ρ η ATM ηsys + 4 P BK Received power P R [W] Transmitted power P T [W] Equally distributed along a sphere [m -2 ] Antenna gain (opening angle in respect to the sphere) β [],db Area A of target [m 2 ] and with reflection coef. ρ Equally distributed backscatter along a sphere [m -2 ] Backscatter in cone with opening angle Ω Receiver aperture D [m 2 ] Atmospheric and system loss η ATM, η SYS [] Background radiation (sun, shot noise, ) P BK [W] 13
14 Influence of target size on received power P P D 4πβ R 4πAρ Ω 2 R = T 2 4 ηatmη SYS + P BK Influence of target size on received power Extended target A=R 2 βπ/4 P R 1/R 2 Example: open terrain Linear target A=Rβd P R 1/R 3 Example: wire with diameter d (very small) Point target A=const P R 1/R 4 Example: leaf 14

 General: π σ = 4 ρ A Ω P BK A")
15 P Backscatter cross section P D 4πAρ 4πβ R 12 Ω3 σ 2 T R = η 2 4 ATMη SYS + Backscatter cross section σ [m²]: combines all relevant object parameters Isotrop Ω=4π σ = ρa Lambertian Ω=π σ = 4ρA (orthogonal incidence) General: π σ = 4 ρ A Ω P BK A 15
16 LIDAR - LIght Detection And Ranging Pulse Run Time typically used in ALS Pulse-Generator start Counter stop laser Transmitter Δt Detector Photodiode, Photomultiplier, Specular reflection (free) atmosphere Absorption Target Reflector 16
17 Laser Range Finding Range r = c * Δt / 2 with speed of light c ~ 3*10 8 m/s Necessary for successful measurement of Δt Diffuse reflection High SNR (signal to noise ration) Accuracy of time measurement σ t leads to accuracy of range σ r = 1.5*10 8 *σ t, provided c is correct temperature change by 1 C 1 ppm = 1 mm/km Example: σ t = 0.2 ns, σ r = 3 cm Range is measured integral over the entire footprint 17
18 Multiple targets along the laser beam I Laser pulse has a certain energy distribution along (pulse length) and across (foot print area) the beam direction Within the beam: instantaneous field of view multiple different (area, linear, point) targets can be illuminated and can generate a sensable echo One pulse can therefore generate multiple echoes i.e.: first echo, intermediate echoes, last echo 18
19 Cross section and height spread Slanted and rough surfaces = Echoes are widened Two echoes Cross section is a function of range σ σ(r) 19
20 Discrete return systems In discrete return laser scanning systems, ranges to objects separated further than half the echo length can be measured Objects closer together cause a compound echo, and the range will refer to an intermediate distance According to their arrival time, echoes are called first, second, intermediate, last echo Scanning over a forest, last echoes may be Reflections from the ground Reflections from dense vegetation above the ground long ranges, referring to ranges beyond the ground, e.g. due to multi-path effects 20

21 First and last echoes DSM of first echoes DSM of last echoes Leitha: GE0A0209.xyz 21

22 Discrete Echo vs. Full-Wave-Form LIDAR Echo waveform Discrete echoes Laser foot print: ~ 0.2 3m Recording the entire return signal using a sampling interval of ~1ns FWF ALS 22

23 Discrete Echo vs. Full-Wave-Form LIDAR 23
24 Backscattering cross section How is the echo formed? Lidar equation Power received, P R (t) vs. transmitted power P T (t) P P D 4πβ R 4πAρ Ω 2 R = T 2 4 ηatmη SYS + FWF realizes power as a function of time (~range) Height spread of object should be considered, too Therefore, target cross section is a function of range (~time), too σ σ(r) P BK

25 After: Wagner. Der Laserstrahl und seine Interation mit Oberflächen unterschiedlicher Beschaffenheit. Inst. of Photogrammetry and Remote Sensing, Vienna University of Technology, Pulse deformation on objects Flat surface Sloped surface Tree Emitted pulse Height spread of object Re-ceived echo
26 Target cross section Received echo is a convolution of the emitted pulse with the target cross section Multiple, spatially distinct echoes, may be separated in the Lidar equation For one cross section σ i (R), the Lidar equation is: P 2 Ri +δ D 2R R, i ( t) PT ( t ) σ 2 4 i 4πβ R c i R δ ( R) dr The entire echo is the sum over the individual returns i 2δ is the spatial extent along the beam
27 Terms P 2 Ri +δ D 2R R, i ( t) PT ( t ) σ 2 4 i 4πβ R c i R δ Dynamic Lidar equation σ i (R) is the differential target cross section σ i (R) dr, the integral over the diff.c.s., is the target cross section i ( R) dr Target cross section = backscattering cross section = cross section

![06 0.04 Cross section [m 2 ] Amplitude 25 20 15 10 Laser pulse](/docs-images/77/75204576/images/28-1.jpg "Gaussian model 0.")
 Convolution Viewing")
28 Convolution real example Viewing direction Emitted pulse Height distribution of objects Received echoes Amplitude Cross section [m 2 ] Amplitude Laser pulse Gaussian model Distance (m) Distance (m) Convolution Viewing direction Viewing direction Data courtesy of Riegl Gmbh.
29 Full waveform analysis 2 options Extract parameters of interest directly from the waveform - simpler, but waveform depends on object and mission parameters 2 step approach 1. extract cross section (and/or differential cross section) parameters 2. extract parameters of interest from cross section parameters mathematically more complex, but cross section independent of mission parameters
30 Waveform parameters Waveform parameters include Duration (length), Centroid (mean elevation) Distance from first to last peak Height of median energy (HOME) Return waveform energy The above parameters can be derived from the sampled waveform directly. Used in analysis of ICESat data! Images: Ph.D. Duong, TU Delft
31 Waveform modeling Extracting waveform modes and parameters of each mode (=echo) is better performed by waveform modeling. - Overlapping echoes can be separated - Noise reduction through fitting of functional models
32 Waveform modeling Waveform modeling is performed similarly by different groups [Delft: Van Duong, Vienna: Wagner, Newcastle: Yu-Chin Lin, Paris: Mallet, Colorado: Lefsky, NASA: Harding; et.al.] GMM (Gaussian Mixture Model) is applied most often (or extensions thereof). wf ( t) = c + i= 1 ( t μ The wf (waveform) is a sum of Gaussians plus a constant offset c. m A e i i ) 2 / s 2 i
33 Waveform modeling GMM wf ( t) = c + m i= 1 A e i ( t μ ) i 2 / s 2 i The number of modes (echoes?) has to be estimated in advance (sets model complexity). The estimation is not linear, thus approximate values for the unknowns have to be supplied. The unknowns are: c, A, μ, s ; i = 1, K i i i m
34 Meaning of parameters Waveform modeling - c average background noise (electronic noise) - µ arrival time of backscattered pulse (subtract from µ of emitted pulse to obtain pulse travel duration) range - A power of received echo (amplitude) - s width of received echo (must not be smaller than s of emitted pulse)

35 Full-Wave-Form-Analysis in Postprocessing Gaussian decomposition: Detection of echos by fitting Gaussian curves Information per echo: Amplitude P Range R Echo width s R s P Cross section σ With FWF-Analysis the echos from the lower vegetation can be separated from the echos from the ground much better or the mixted echo of both objects is detected because of its larger echo width. Improvement of DTM computation 35
 acquired with a Riegl laser scanner.")
36 FWF Example Schönbrunn Example on next slides shows one ALS FWF strip over Schönbrunn castle (Vienna, Austria) acquired with a Riegl laser scanner. Orthophoto 36







37 FWF Data Range Amplitude Echo width Ortho photo 37
38 Notes Full waveform analysis Emitted Gaussian pulse (system waveform) shape can be engineered by system designer Small deviations may remain (blue: typical system waveform, red: ideal Gaussian) Assumption on Gaussian differential cross section becomes less and less valid for larger footprints due to increase of object complexity within footprint. deconvolution requires some form of regularization / noise suppression. Mathematically difficult problem with physical side conditions 38
39 Full waveform analysis Deriving the cross section makes the analysis independent of the emitted pulse power, the pulse duration, and the range. Thus it is to be preferred. But deconvolution is complex and does not necessarily have a unique solution. If, however, the emitted pulse is Gaussian and the differential target cross sections are Gaussians, then the backscattered echo follows the GMM. (because Gaussian convolved with Gaussian is Gaussian) P 2 Ri +δ D 2R R, i ( t) PT ( t ) σ 2 4 i 4πβ R c i Ri δ m 2 2 ( t μi ) / si ( t) = c + Ai e i= 1 wf ( R) dr
40 Full waveform analysis Convolution and deconvolution Variance (s 2 ) is square of width measure - s 2 E for emitted pulse - s D2 for detected echo - s CS2 for cross section (width) s E2 + s CS2 = s 2 D Estimated from FWF data: s E2, s 2 D Therefore: s 2 CS = s 2 D -s 2 E Amplitude Laser pulse Gaussian model Distance (m) Amplitude Distance (m)
41 Cross section Cross section (differential cross section) is found? - Yes, w.r.t. cross section width - No, w.r.t. integral under the curve System parameters unknown - Require radiometric control point(s)
42 Radiometric Calibration Laser equation in backscr. cross sect. σ[m²]: Backscatter coefficient [db]: P γ σ 4σ = 2 Acosα = πβ R P D 4πβ R 2 T R = σ η 2 4 ATMη SYS + 2 P BK Laser equation in γ: P P D 16R 2 R = T 2 γ ηatmη SYS + P BK Beam cross section: Acosα Acosα α α A 42

![.. atmospheric transmission factor γ... Backscattering coefficient [m 2 m -2 ] Ŝ... Amplitude of the system waveform [DN] s s... Standard deviation of the system waveform [s] P.](/docs-images/77/75204576/images/43-1.jpg ".. Amplitude of the echo [DN] s p... Standard deviation of the echo [s] C cal (only dependent on constant system parameters) η = 10 2R a /10000 atm a.")
43 Radiometric Calibration Uncalibrated radiometric information difficult to use 2 PD t = ηatmη sys 16R Pr 2 γ from FWF analysis: P t P r Ss ˆ s Ps ˆ p γ = D 2 16 Sˆ s s η sys R 2 η Pˆ atm s p P r... Received power [W] P t... Transmitted power [W] D... Diameter of receiver aperture [m] R... Range [m] η sys... system transmission factor η atm... atmospheric transmission factor γ... Backscattering coefficient [m 2 m -2 ] Ŝ... Amplitude of the system waveform [DN] s s... Standard deviation of the system waveform [s] P... Amplitude of the echo [DN] s p... Standard deviation of the echo [s] C cal (only dependent on constant system parameters) η = 10 2R a /10000 atm a... atmospheric attenuation coefficient [db/km] j 43
44 Resulting radiometric quantities Backscattering coefficient γ []: γ = C cal atm Assuming diffuse (Lambertian) reflectors: R 2 η Pˆ s p γ d = 4ρ d cosα with ρ d the diffuse reflectance measure (0 to 100%), which depends only on the object and not on the view point. If C cal is known, then for each target with known incidence angle α its reflectance measure ρ d can be computed: ~ ρ d = 4 γ = cosα C cal 4 R 2 Pˆ s p cosα η atm 44
![Determination of C cal Calibration Target (CT) (e.g. asphalt) γ CT, j = 4 ~ ρ CT ( α ) cosα j j γ = C cal R 2 η Pˆ atm s p γ CT,j... Backscattering coefficient of the CT of echo j [m 2 m -2 ] ρ CT.](/docs-images/77/75204576/images/45-0.jpg ".. Reflectance of the calibration target CT θ j Angle of incidence of the echo j within the calibration target Idea: Using a reflectometer ρ CT can be determined for the asphalt, which is then used")
45 Determination of C cal Calibration Target (CT) (e.g. asphalt) γ CT, j = 4 ~ ρ CT ( α ) cosα j j γ = C cal R 2 η Pˆ atm s p γ CT,j... Backscattering coefficient of the CT of echo j [m 2 m -2 ] ρ CT... Reflectance of the calibration target CT θ j Angle of incidence of the echo j within the calibration target Idea: Using a reflectometer ρ CT can be determined for the asphalt, which is then used for the ALS measurements to derive C cal. From then on, all γ from ALS can be converted into ρ. 45





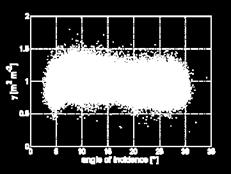
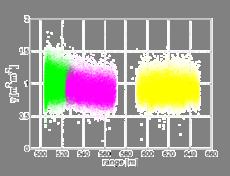


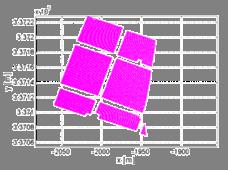



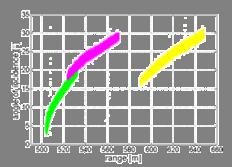



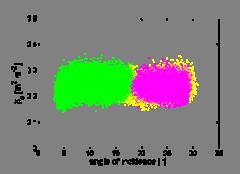
46 Determination of C cal for 1 Calibration Target (CT) Fieldin strip1 Fieldin strip2 Fieldin strip3 P γ Vienna wide ALS campaign December 2006 ρ d 46


47 Amplitude P (Vienna 2006) 47


48 Diffuse reflectance ρ (Vienna 2006) 48
49 Is there a use in full waveform?

50 ALS Leithagebirge DSM (first echo) In cooperation with: Dr. Michael Doneus, Inst. f. Ur- u. Frühgeschichte, Wien 50

51 ALS Leithagebirge DSM (last echo - SCOP++) In cooperation with: Dr. Michael Doneus, Inst. f. Ur- u. Frühgeschichte, Wien 51


52 ALS Leithagebirge Aerial images In cooperation with: Dr. Michael Doneus, Inst. f. Ur- u. Frühgeschichte, Wien 52

53 ALS Leithagebirge FWF Attribut: Amplitude First-Echo In cooperation with: Dr. Michael Doneus, Inst. f. Ur- u. Frühgeschichte, Wien 53

54 ALS Leithagebirge FWF Attribut: Echo Width In cooperation with: Dr. Michael Doneus, Inst. f. Ur- u. Frühgeschichte, Wien Last-Echo 54
55 Improved DTM derivation using ALS point clouds ALS point cloud (combiend from all ALS flight strips) Selection of the Last Echo points Pre-Filtering / Pre-Classification using the FWF attributes (elimination of potential vegetation echos) Filtering / Classification (Seperation of terrain and off-terrain points; e.g. using robust filtering) Computation of the DTM using all points classified as terrain 55

. Prior weights depend. on echo width and ampl.")
56 Hard classification vs. smart priors Scatter plot of last echoes from ground under vegetation Weight function Accuracy of extracted echo width depends on amplitude (the higher the better). Prior weights depend. on echo width and ampl. instead of hard classification. Echo width of transmitted signal Echo width [ns] Mücke W.,
57 Robust Interpolation without individual weights Kriging profile (black) without robust interpolation, equal weighted points Kriging profile (black) after rob. interpolation (10 iterations) 57
58 Robust Interpolation with individual weights Kriging profile (black) without robust interpolation, individual weights per point (echo width) Kriging profile (black) after rob. interpolation (2 iterations) 58
59 Improved DTM after considering the Echo Width DONEUS M., BRIESE C. Full-waveform airborne laser scanning as a tool for archaeological reconnaissance, International Conference on Remote Sensing in Archaeology, Rom; ; in: "From Space to Place. Proceedings of the 2nd International Conference on Remote Sensing in Archaeology", BAR International Series, 1568 (2006), , December
60 Summary Fundamentals of LiDAR for geo-spatial applications were presented Next step: from physics to geometry Still missing in this introduction - What to do, if the signals are not approximately Gaussians? - How does this apply to phase-based laser ranging? - Direct geo-referencing - Scanning as such - Strip adjustment
CALIBRATION OF A TERRESTRIAL FULL WAVEFORM LASER SCANNER INTRODUCTION
 CALIBRATION OF A TERRESTRIAL FULL WAVEFORM LASER SCANNER Preston J. Hartzell Craig L. Glennie Department of Civil and Environmental Engineering University of Houston Houston, TX 77204 pjhartzell@uh.edu
CALIBRATION OF A TERRESTRIAL FULL WAVEFORM LASER SCANNER Preston J. Hartzell Craig L. Glennie Department of Civil and Environmental Engineering University of Houston Houston, TX 77204 pjhartzell@uh.edu
FROM SINGLE-PULSE TO FULL-WAVEFORM AIRBORNE LASER SCANNERS: POTENTIAL AND PRACTICAL CHALLENGES
 FROM SINGLE-PULSE TO FULL-WAVEFORM AIRBORNE LASER SCANNERS: POTENTIAL AND PRACTICAL CHALLENGES W. Wagner a, *, A. Ullrich b, T. Melzer a, C. Briese c, K. Kraus c a Christian Doppler Laboratory for Spatial
FROM SINGLE-PULSE TO FULL-WAVEFORM AIRBORNE LASER SCANNERS: POTENTIAL AND PRACTICAL CHALLENGES W. Wagner a, *, A. Ullrich b, T. Melzer a, C. Briese c, K. Kraus c a Christian Doppler Laboratory for Spatial
Airborne Laser Scanning. Long-Range Airborne Laser Scanner for Full Waveform Analysis. visit our webpage LASER MEASUREMENT SYSTEMS
 Long-Range Airborne Laser Scanner for Full Waveform Analysis LMS-Q680 The long-range RIEGL LMS-Q680 airborne laser scanner makes use of a powerful laser source and of RIEGL s proprietary digital full waveform
Long-Range Airborne Laser Scanner for Full Waveform Analysis LMS-Q680 The long-range RIEGL LMS-Q680 airborne laser scanner makes use of a powerful laser source and of RIEGL s proprietary digital full waveform
Introduction Active microwave Radar
 RADAR Imaging Introduction 2 Introduction Active microwave Radar Passive remote sensing systems record electromagnetic energy that was reflected or emitted from the surface of the Earth. There are also
RADAR Imaging Introduction 2 Introduction Active microwave Radar Passive remote sensing systems record electromagnetic energy that was reflected or emitted from the surface of the Earth. There are also
remote sensing? What are the remote sensing principles behind these Definition
 Introduction to remote sensing: Content (1/2) Definition: photogrammetry and remote sensing (PRS) Radiation sources: solar radiation (passive optical RS) earth emission (passive microwave or thermal infrared
Introduction to remote sensing: Content (1/2) Definition: photogrammetry and remote sensing (PRS) Radiation sources: solar radiation (passive optical RS) earth emission (passive microwave or thermal infrared
746A27 Remote Sensing and GIS
 746A27 Remote Sensing and GIS Lecture 1 Concepts of remote sensing and Basic principle of Photogrammetry Chandan Roy Guest Lecturer Department of Computer and Information Science Linköping University What
746A27 Remote Sensing and GIS Lecture 1 Concepts of remote sensing and Basic principle of Photogrammetry Chandan Roy Guest Lecturer Department of Computer and Information Science Linköping University What
Passive Microwave Sensors LIDAR Remote Sensing Laser Altimetry. 28 April 2003
 Passive Microwave Sensors LIDAR Remote Sensing Laser Altimetry 28 April 2003 Outline Passive Microwave Radiometry Rayleigh-Jeans approximation Brightness temperature Emissivity and dielectric constant
Passive Microwave Sensors LIDAR Remote Sensing Laser Altimetry 28 April 2003 Outline Passive Microwave Radiometry Rayleigh-Jeans approximation Brightness temperature Emissivity and dielectric constant
Calibration of a Terrestrial Full Waveform Laser Scanner
 Calibration of a Terrestrial Full Waveform Laser Scanner Baltimore, Maryland March 27, 2013 Preston J. Hartzell (pjhartzell@uh.edu) Craig L. Glennie Department of Civil and Environmental Engineering University
Calibration of a Terrestrial Full Waveform Laser Scanner Baltimore, Maryland March 27, 2013 Preston J. Hartzell (pjhartzell@uh.edu) Craig L. Glennie Department of Civil and Environmental Engineering University
ESA Radar Remote Sensing Course ESA Radar Remote Sensing Course Radar, SAR, InSAR; a first introduction
 Radar, SAR, InSAR; a first introduction Ramon Hanssen Delft University of Technology The Netherlands r.f.hanssen@tudelft.nl Charles University in Prague Contents Radar background and fundamentals Imaging
Radar, SAR, InSAR; a first introduction Ramon Hanssen Delft University of Technology The Netherlands r.f.hanssen@tudelft.nl Charles University in Prague Contents Radar background and fundamentals Imaging
GENERATING RETURN WAVEFORM FOR LLRI ONBOARD CHANDRAYAN-1
 1 GENERATING RETURN WAVEFORM FOR LLRI ONBOARD CHANDRAYAN-1 BHARAT LOHANI @, NISHANT BHATNAGAR, ADITYA ROSHAN Indian Institute of Technology Kanpur, Kanpur-08016, India. @ Corresponding author: blohani@iitk.ac.in
1 GENERATING RETURN WAVEFORM FOR LLRI ONBOARD CHANDRAYAN-1 BHARAT LOHANI @, NISHANT BHATNAGAR, ADITYA ROSHAN Indian Institute of Technology Kanpur, Kanpur-08016, India. @ Corresponding author: blohani@iitk.ac.in
RIEGL VQ -780i NEW. Airborne Laser Scanning. Waveform Processing Airborne Laser Scanner for Ultra Wide Area Mapping and High Productivity.
 Waveform Processing Airborne Laser Scanner for Ultra Wide Area Mapping and High Productivity. NEW RIEGL VQ -78i online waveform processing as well as smart and full waveform recording excellent multiple
Waveform Processing Airborne Laser Scanner for Ultra Wide Area Mapping and High Productivity. NEW RIEGL VQ -78i online waveform processing as well as smart and full waveform recording excellent multiple
Preliminary Datasheet
 LONG-RANGE AIRBORNE LASER SCANNER LMS-Q680 FOR FULL WAVEFORM ANALYSIS The new long-range RIEGL LMS-Q680 airborne laser scanner makes use of a powerful laser source and of RIEGL s proprietary digital full
LONG-RANGE AIRBORNE LASER SCANNER LMS-Q680 FOR FULL WAVEFORM ANALYSIS The new long-range RIEGL LMS-Q680 airborne laser scanner makes use of a powerful laser source and of RIEGL s proprietary digital full
NEW. Airborne Laser Scanning. Waveform Processing Airborne Laser Scanner for Wide Area Mapping and High Productivity. visit our website
 Waveform Processing Airborne Laser Scanner for Wide Area Mapping and High Productivity. NEW RIEGL VQ -780i online waveform processing as well as smart and full waveform recording excellent multiple target
Waveform Processing Airborne Laser Scanner for Wide Area Mapping and High Productivity. NEW RIEGL VQ -780i online waveform processing as well as smart and full waveform recording excellent multiple target
Status of MOLI development MOLI (Multi-footprint Observation Lidar and Imager)
") Status of MOLI development MOLI (Multi-footprint Observation Lidar and Imager) Tadashi IMAI, Daisuke SAKAIZAWA, Jumpei MUROOKA and Toshiyoshi KIMURA JAXA 1 Outline of This Presentation 1. Overview of MOLI
Status of MOLI development MOLI (Multi-footprint Observation Lidar and Imager) Tadashi IMAI, Daisuke SAKAIZAWA, Jumpei MUROOKA and Toshiyoshi KIMURA JAXA 1 Outline of This Presentation 1. Overview of MOLI
Active and Passive Microwave Remote Sensing
 Active and Passive Microwave Remote Sensing Passive remote sensing system record EMR that was reflected (e.g., blue, green, red, and near IR) or emitted (e.g., thermal IR) from the surface of the Earth.
Active and Passive Microwave Remote Sensing Passive remote sensing system record EMR that was reflected (e.g., blue, green, red, and near IR) or emitted (e.g., thermal IR) from the surface of the Earth.
ANALYSIS OF REPEATED ICESAT FULL WAVEFORM DATA: METHODOLOGY AND LEAF-ON / LEAF-OFF COMPARISON
 ANALYSIS OF REPEATED ICESAT FULL WAVEFORM DATA: METHODOLOGY AND LEAF-ON / LEAF-OFF COMPARISON Hieu Duong 1 Norbert Pfeifer 2 Roderik Lindenbergh 1 1 1: DEOS, MGP-FRS, 2: University of Innsbruck, Institute
ANALYSIS OF REPEATED ICESAT FULL WAVEFORM DATA: METHODOLOGY AND LEAF-ON / LEAF-OFF COMPARISON Hieu Duong 1 Norbert Pfeifer 2 Roderik Lindenbergh 1 1 1: DEOS, MGP-FRS, 2: University of Innsbruck, Institute
RADIOMETRIC CALIBRATION OF INTENSITY IMAGES OF SWISSRANGER SR-3000 RANGE CAMERA
 The Photogrammetric Journal of Finland, Vol. 21, No. 1, 2008 Received 5.11.2007, Accepted 4.2.2008 RADIOMETRIC CALIBRATION OF INTENSITY IMAGES OF SWISSRANGER SR-3000 RANGE CAMERA A. Jaakkola, S. Kaasalainen,
The Photogrammetric Journal of Finland, Vol. 21, No. 1, 2008 Received 5.11.2007, Accepted 4.2.2008 RADIOMETRIC CALIBRATION OF INTENSITY IMAGES OF SWISSRANGER SR-3000 RANGE CAMERA A. Jaakkola, S. Kaasalainen,
Rec. ITU-R P RECOMMENDATION ITU-R P *
 Rec. ITU-R P.682-1 1 RECOMMENDATION ITU-R P.682-1 * PROPAGATION DATA REQUIRED FOR THE DESIGN OF EARTH-SPACE AERONAUTICAL MOBILE TELECOMMUNICATION SYSTEMS (Question ITU-R 207/3) Rec. 682-1 (1990-1992) The
Rec. ITU-R P.682-1 1 RECOMMENDATION ITU-R P.682-1 * PROPAGATION DATA REQUIRED FOR THE DESIGN OF EARTH-SPACE AERONAUTICAL MOBILE TELECOMMUNICATION SYSTEMS (Question ITU-R 207/3) Rec. 682-1 (1990-1992) The
Sub-system and System Level Testing and Calibration of Space Altimeters and LIDARS.
 Sub-system and System Level Testing and Calibration of Space Altimeters and LIDARS. Haris Riris, Pete Liiva, Xiaoli Sun, James Abshire Laser Remote Sensing Branch Goddard Space Flight Center, Greenbelt,
Sub-system and System Level Testing and Calibration of Space Altimeters and LIDARS. Haris Riris, Pete Liiva, Xiaoli Sun, James Abshire Laser Remote Sensing Branch Goddard Space Flight Center, Greenbelt,
Echo Digitization and Waveform Analysis in Airborne and Terrestrial Laser Scanning
 Photogrammetric Week '11 Dieter Fritsch (Ed.) Wichmann/VDE Verlag, Belin & Offenbach, 2011 Ullrich, Pfennigbauer 217 Echo Digitization and Waveform Analysis in Airborne and Terrestrial Laser Scanning ANDREAS
Photogrammetric Week '11 Dieter Fritsch (Ed.) Wichmann/VDE Verlag, Belin & Offenbach, 2011 Ullrich, Pfennigbauer 217 Echo Digitization and Waveform Analysis in Airborne and Terrestrial Laser Scanning ANDREAS
EE 529 Remote Sensing Techniques. Introduction
 EE 529 Remote Sensing Techniques Introduction Course Contents Radar Imaging Sensors Imaging Sensors Imaging Algorithms Imaging Algorithms Course Contents (Cont( Cont d) Simulated Raw Data y r Processing
EE 529 Remote Sensing Techniques Introduction Course Contents Radar Imaging Sensors Imaging Sensors Imaging Algorithms Imaging Algorithms Course Contents (Cont( Cont d) Simulated Raw Data y r Processing
Microwave Remote Sensing
 Provide copy on a CD of the UCAR multi-media tutorial to all in class. Assign Ch-7 and Ch-9 (for two weeks) as reading material for this class. HW#4 (Due in two weeks) Problems 1,2,3 and 4 (Chapter 7)
Provide copy on a CD of the UCAR multi-media tutorial to all in class. Assign Ch-7 and Ch-9 (for two weeks) as reading material for this class. HW#4 (Due in two weeks) Problems 1,2,3 and 4 (Chapter 7)
Microwave Remote Sensing (1)
") Microwave Remote Sensing (1) Microwave sensing encompasses both active and passive forms of remote sensing. The microwave portion of the spectrum covers the range from approximately 1cm to 1m in wavelength.
Microwave Remote Sensing (1) Microwave sensing encompasses both active and passive forms of remote sensing. The microwave portion of the spectrum covers the range from approximately 1cm to 1m in wavelength.
Radar Imaging Wavelengths
 A Basic Introduction to Radar Remote Sensing ~~~~~~~~~~ Rev. Ronald J. Wasowski, C.S.C. Associate Professor of Environmental Science University of Portland Portland, Oregon 3 November 2015 Radar Imaging
A Basic Introduction to Radar Remote Sensing ~~~~~~~~~~ Rev. Ronald J. Wasowski, C.S.C. Associate Professor of Environmental Science University of Portland Portland, Oregon 3 November 2015 Radar Imaging
RADAR REMOTE SENSING
 RADAR REMOTE SENSING Jan G.P.W. Clevers & Steven M. de Jong Chapter 8 of L&K 1 Wave theory for the EMS: Section 1.2 of L&K E = electrical field M = magnetic field c = speed of light : propagation direction
RADAR REMOTE SENSING Jan G.P.W. Clevers & Steven M. de Jong Chapter 8 of L&K 1 Wave theory for the EMS: Section 1.2 of L&K E = electrical field M = magnetic field c = speed of light : propagation direction
Active and Passive Microwave Remote Sensing
 Active and Passive Microwave Remote Sensing Passive remote sensing system record EMR that was reflected (e.g., blue, green, red, and near IR) or emitted (e.g., thermal IR) from the surface of the Earth.
Active and Passive Microwave Remote Sensing Passive remote sensing system record EMR that was reflected (e.g., blue, green, red, and near IR) or emitted (e.g., thermal IR) from the surface of the Earth.
ESCI Cloud Physics and Precipitation Processes Lesson 10 - Weather Radar Dr. DeCaria
 ESCI 340 - Cloud Physics and Precipitation Processes Lesson 10 - Weather Radar Dr. DeCaria References: A Short Course in Cloud Physics, 3rd ed., Rogers and Yau, Ch. 11 Radar Principles The components of
ESCI 340 - Cloud Physics and Precipitation Processes Lesson 10 - Weather Radar Dr. DeCaria References: A Short Course in Cloud Physics, 3rd ed., Rogers and Yau, Ch. 11 Radar Principles The components of
CO 2 Remote Detection Using a 2-µm DIAL Instrument
 CO 2 Remote Detection Using a 2-µm DIAL Instrument Erwan Cadiou 1,2, Dominique Mammez 1,2, Jean-Baptiste Dherbecourt 1,, Guillaume Gorju 1, Myriam Raybaut 1, Jean-Michel Melkonian 1, Antoine Godard 1,
CO 2 Remote Detection Using a 2-µm DIAL Instrument Erwan Cadiou 1,2, Dominique Mammez 1,2, Jean-Baptiste Dherbecourt 1,, Guillaume Gorju 1, Myriam Raybaut 1, Jean-Michel Melkonian 1, Antoine Godard 1,
DOPPLER RADAR. Doppler Velocities - The Doppler shift. if φ 0 = 0, then φ = 4π. where
 Q: How does the radar get velocity information on the particles? DOPPLER RADAR Doppler Velocities - The Doppler shift Simple Example: Measures a Doppler shift - change in frequency of radiation due to
Q: How does the radar get velocity information on the particles? DOPPLER RADAR Doppler Velocities - The Doppler shift Simple Example: Measures a Doppler shift - change in frequency of radiation due to
LMS-Q780. Airborne Laser Scanning. Full Waveform Digitizing Airborne Laser Scanner for Wide Area Mapping. Preliminary Datasheet
 Full Waveform Digitizing Airborne Laser Scanner for Wide Area Mapping LMS-Q78 l up to 66 measurements/sec on the ground even from a typical operating altitude of 67 ft l multiple time around processing:
Full Waveform Digitizing Airborne Laser Scanner for Wide Area Mapping LMS-Q78 l up to 66 measurements/sec on the ground even from a typical operating altitude of 67 ft l multiple time around processing:
RIEGL s VUX-1HA High Accuracy kinematic LiDAR sensor is a very high
 High-Performance LiDAR Sensor for KINEMATIC Laser Scanning RIEGL VUX-1HA very high measurement rate up to 1,, meas./sec very high scan speed up to 25 scans / second 5 mm survey-grade accuracy field of
High-Performance LiDAR Sensor for KINEMATIC Laser Scanning RIEGL VUX-1HA very high measurement rate up to 1,, meas./sec very high scan speed up to 25 scans / second 5 mm survey-grade accuracy field of
John P. Stevens HS: Remote Sensing Test
 Name(s): Date: Team name: John P. Stevens HS: Remote Sensing Test 1 Scoring: Part I - /18 Part II - /40 Part III - /16 Part IV - /14 Part V - /93 Total: /181 2 I. History (3 pts. each) 1. What is the name
Name(s): Date: Team name: John P. Stevens HS: Remote Sensing Test 1 Scoring: Part I - /18 Part II - /40 Part III - /16 Part IV - /14 Part V - /93 Total: /181 2 I. History (3 pts. each) 1. What is the name
Remote Sensing 1 Principles of visible and radar remote sensing & sensors
 Remote Sensing 1 Principles of visible and radar remote sensing & sensors Nick Barrand School of Geography, Earth & Environmental Sciences University of Birmingham, UK Field glaciologist collecting data
Remote Sensing 1 Principles of visible and radar remote sensing & sensors Nick Barrand School of Geography, Earth & Environmental Sciences University of Birmingham, UK Field glaciologist collecting data
EE 529 Remote Sensing Techniques. Radar
 EE 59 Remote Sensing Techniques Radar Outline Radar Resolution Radar Range Equation Signal-to-Noise Ratio Doppler Frequency Basic function of an active radar Radar RADAR: Radio Detection and Ranging Detection
EE 59 Remote Sensing Techniques Radar Outline Radar Resolution Radar Range Equation Signal-to-Noise Ratio Doppler Frequency Basic function of an active radar Radar RADAR: Radio Detection and Ranging Detection
AIRBORNE LASER SCANNER FOR FULL WAVEFORM ANALYSIS. visit our webpage
 AIRBORNE LASER SCANNER LMS-Q560 FOR FULL WAVEFORM ANALYSIS The RIEGL LMS-Q560 is a revolutionary new D laser scanner using the latest state-of-the-art digital signal processing, which meets the most challenging
AIRBORNE LASER SCANNER LMS-Q560 FOR FULL WAVEFORM ANALYSIS The RIEGL LMS-Q560 is a revolutionary new D laser scanner using the latest state-of-the-art digital signal processing, which meets the most challenging
AIRBORNE LASER SCANNER FOR FULL WAVEFORM ANALYSIS. visit our webpage
 AIRBORNE LASER SCANNER LMS-Q560 FOR FULL WAVEFORM ANALYSIS The RIEGL LMS-Q560 is a revolutionary D laser scanner using the latest state-of-the-art digital signal processing, which meets the most challenging
AIRBORNE LASER SCANNER LMS-Q560 FOR FULL WAVEFORM ANALYSIS The RIEGL LMS-Q560 is a revolutionary D laser scanner using the latest state-of-the-art digital signal processing, which meets the most challenging
Int n r t o r d o u d c u ti t on o n to t o Remote Sensing
 Introduction to Remote Sensing Definition of Remote Sensing Remote sensing refers to the activities of recording/observing/perceiving(sensing)objects or events at far away (remote) places. In remote sensing,
Introduction to Remote Sensing Definition of Remote Sensing Remote sensing refers to the activities of recording/observing/perceiving(sensing)objects or events at far away (remote) places. In remote sensing,
Use of Naturally Available Reference Targets to Calibrate Airborne Laser Scanning Intensity Data
 Sensors 2009, 9, 2780-2796; doi:10.3390/s90402780 OPEN ACCESS sensors ISSN 1424-8220 www.mdpi.com/journal/sensors Article Use of Naturally Available Reference Targets to Calibrate Airborne Laser Scanning
Sensors 2009, 9, 2780-2796; doi:10.3390/s90402780 OPEN ACCESS sensors ISSN 1424-8220 www.mdpi.com/journal/sensors Article Use of Naturally Available Reference Targets to Calibrate Airborne Laser Scanning
LMS-Q780. Airborne Laser Scanning. Full Waveform Digitizing Airborne Laser Scanner for Wide Area Mapping. visit our website
 Full Waveform Digitizing Airborne Laser Scanner for Wide Area Mapping LMS-Q78 up to 266 measurements/sec on the ground even from a typical operating altitude of 67 ft multiple time around processing: up
Full Waveform Digitizing Airborne Laser Scanner for Wide Area Mapping LMS-Q78 up to 266 measurements/sec on the ground even from a typical operating altitude of 67 ft multiple time around processing: up
EITN90 Radar and Remote Sensing Lecture 2: The Radar Range Equation
 EITN90 Radar and Remote Sensing Lecture 2: The Radar Range Equation Daniel Sjöberg Department of Electrical and Information Technology Spring 2018 Outline 1 Radar Range Equation Received power Signal to
EITN90 Radar and Remote Sensing Lecture 2: The Radar Range Equation Daniel Sjöberg Department of Electrical and Information Technology Spring 2018 Outline 1 Radar Range Equation Received power Signal to
EXPLORING WEAK AND OVERLAPPED RETURNS OF A LIDAR WAVEFORM WITH A WAVELET-BASED ECHO DETECTOR
 EXPLORING WEAK AND OVERLAPPED RETURNS OF A LIDAR WAVEFORM WITH A WAVELET-BASED ECHO DETECTOR C. K. Wang Dept. of Geomatics, National Cheng Kung University, No. 1, University Road, Tainan, 71, Taiwan -
EXPLORING WEAK AND OVERLAPPED RETURNS OF A LIDAR WAVEFORM WITH A WAVELET-BASED ECHO DETECTOR C. K. Wang Dept. of Geomatics, National Cheng Kung University, No. 1, University Road, Tainan, 71, Taiwan -
(All-Fiber) Coherent Detection Lidars 2
 Coherent Detection Lidars 2") (All-Fiber) Coherent Detection Lidars 2 Cyrus F Abari Advanced Study Program Postdoc, NCAR, Boulder, CO Date: 03-09-2016 Table of contents: Reminder Signal modeling, CW CDLs Direct detection vs. coherent
(All-Fiber) Coherent Detection Lidars 2 Cyrus F Abari Advanced Study Program Postdoc, NCAR, Boulder, CO Date: 03-09-2016 Table of contents: Reminder Signal modeling, CW CDLs Direct detection vs. coherent
Mobile Laser Scanning. High-Performance LiDAR Sensor for KINEMATIC Laser Scanning. visit our website
 High-Performance LiDAR Sensor for KINEMATIC Laser Scanning RIEGL VUX-1HA very high measurement rate up to 1,, meas./sec very high scan speed up to 25 scans / second 5 mm survey-grade accuracy field of
High-Performance LiDAR Sensor for KINEMATIC Laser Scanning RIEGL VUX-1HA very high measurement rate up to 1,, meas./sec very high scan speed up to 25 scans / second 5 mm survey-grade accuracy field of
Helicopter Aerial Laser Ranging
 Helicopter Aerial Laser Ranging Håkan Sterner TopEye AB P.O.Box 1017, SE-551 11 Jönköping, Sweden 1 Introduction Measuring distances with light has been used for terrestrial surveys since the fifties.
Helicopter Aerial Laser Ranging Håkan Sterner TopEye AB P.O.Box 1017, SE-551 11 Jönköping, Sweden 1 Introduction Measuring distances with light has been used for terrestrial surveys since the fifties.
Full Waveform Digitizing, Dual Channel Airborne LiDAR Scanning System for Ultra Wide Area Mapping
 Full Waveform Digitizing, Dual Channel Airborne LiDAR Scanning System for Ultra Wide Area Mapping RIEGL LMS-Q56 high laser pulse repetition rate up to 8 khz digitization electronics for full waveform data
Full Waveform Digitizing, Dual Channel Airborne LiDAR Scanning System for Ultra Wide Area Mapping RIEGL LMS-Q56 high laser pulse repetition rate up to 8 khz digitization electronics for full waveform data
Image interpretation and analysis
 Image interpretation and analysis Grundlagen Fernerkundung, Geo 123.1, FS 2014 Lecture 7a Rogier de Jong Michael Schaepman Why are snow, foam, and clouds white? Why are snow, foam, and clouds white? Today
Image interpretation and analysis Grundlagen Fernerkundung, Geo 123.1, FS 2014 Lecture 7a Rogier de Jong Michael Schaepman Why are snow, foam, and clouds white? Why are snow, foam, and clouds white? Today
FOR 353: Air Photo Interpretation and Photogrammetry. Lecture 2. Electromagnetic Energy/Camera and Film characteristics
 FOR 353: Air Photo Interpretation and Photogrammetry Lecture 2 Electromagnetic Energy/Camera and Film characteristics Lecture Outline Electromagnetic Radiation Theory Digital vs. Analog (i.e. film ) Systems
FOR 353: Air Photo Interpretation and Photogrammetry Lecture 2 Electromagnetic Energy/Camera and Film characteristics Lecture Outline Electromagnetic Radiation Theory Digital vs. Analog (i.e. film ) Systems
ATS 351 Lecture 9 Radar
 ATS 351 Lecture 9 Radar Radio Waves Electromagnetic Waves Consist of an electric field and a magnetic field Polarization: describes the orientation of the electric field. 1 Remote Sensing Passive vs Active
ATS 351 Lecture 9 Radar Radio Waves Electromagnetic Waves Consist of an electric field and a magnetic field Polarization: describes the orientation of the electric field. 1 Remote Sensing Passive vs Active
LTE. Tester of laser range finders. Integrator Target slider. Transmitter channel. Receiver channel. Target slider Attenuator 2
 a) b) External Attenuators Transmitter LRF Receiver Transmitter channel Receiver channel Integrator Target slider Target slider Attenuator 2 Attenuator 1 Detector Light source Pulse gene rator Fiber attenuator
a) b) External Attenuators Transmitter LRF Receiver Transmitter channel Receiver channel Integrator Target slider Target slider Attenuator 2 Attenuator 1 Detector Light source Pulse gene rator Fiber attenuator
RIEGL VUX-1UAV. Unmanned Laser Scanning. Lightweight UAV Laser Scanner with Online Waveform Processing. visit our website
 Lightweight UAV Laser Scanner with Online Waveform Processing RIEGL VUX-1UAV 1 mm survey-grade accuracy scan speed up to 2 scans / second measurement rate up to 5, meas./sec (@ 55 khz PRR & 33 FOV) operating
Lightweight UAV Laser Scanner with Online Waveform Processing RIEGL VUX-1UAV 1 mm survey-grade accuracy scan speed up to 2 scans / second measurement rate up to 5, meas./sec (@ 55 khz PRR & 33 FOV) operating
Propagation Mechanism
 Propagation Mechanism ELE 492 FUNDAMENTALS OF WIRELESS COMMUNICATIONS 1 Propagation Mechanism Simplest propagation channel is the free space: Tx free space Rx In a more realistic scenario, there may be
Propagation Mechanism ELE 492 FUNDAMENTALS OF WIRELESS COMMUNICATIONS 1 Propagation Mechanism Simplest propagation channel is the free space: Tx free space Rx In a more realistic scenario, there may be
Leica - 3 rd Generation Airborne Digital Sensors Features / Benefits for Remote Sensing & Environmental Applications
 Leica - 3 rd Generation Airborne Digital Sensors Features / Benefits for Remote Sensing & Environmental Applications Arthur Rohrbach, Sensor Sales Dir Europe, Middle-East and Africa (EMEA) Luzern, Switzerland,
Leica - 3 rd Generation Airborne Digital Sensors Features / Benefits for Remote Sensing & Environmental Applications Arthur Rohrbach, Sensor Sales Dir Europe, Middle-East and Africa (EMEA) Luzern, Switzerland,
Introduction to Radar
 National Aeronautics and Space Administration ARSET Applied Remote Sensing Training http://arset.gsfc.nasa.gov @NASAARSET Introduction to Radar Jul. 16, 2016 www.nasa.gov Objective The objective of this
National Aeronautics and Space Administration ARSET Applied Remote Sensing Training http://arset.gsfc.nasa.gov @NASAARSET Introduction to Radar Jul. 16, 2016 www.nasa.gov Objective The objective of this
UNIT Derive the fundamental equation for free space propagation?
 UNIT 8 1. Derive the fundamental equation for free space propagation? Fundamental Equation for Free Space Propagation Consider the transmitter power (P t ) radiated uniformly in all the directions (isotropic),
UNIT 8 1. Derive the fundamental equation for free space propagation? Fundamental Equation for Free Space Propagation Consider the transmitter power (P t ) radiated uniformly in all the directions (isotropic),
ECE 583 Lectures 15 RADAR History and Basics
 ECE 583 Lectures 15 RADAR History and Basics 1 -RADAR - A BIT OF HISTORY The acronym - RADAR is an acronym for Radio Detection and Ranging The Start: The thought/concept of using propagating EM waves began
ECE 583 Lectures 15 RADAR History and Basics 1 -RADAR - A BIT OF HISTORY The acronym - RADAR is an acronym for Radio Detection and Ranging The Start: The thought/concept of using propagating EM waves began
Synthetic aperture RADAR (SAR) principles/instruments October 31, 2018
 principles/instruments October 31, 2018") GEOL 1460/2461 Ramsey Introduction to Remote Sensing Fall, 2018 Synthetic aperture RADAR (SAR) principles/instruments October 31, 2018 I. Reminder: Upcoming Dates lab #2 reports due by the start of next
GEOL 1460/2461 Ramsey Introduction to Remote Sensing Fall, 2018 Synthetic aperture RADAR (SAR) principles/instruments October 31, 2018 I. Reminder: Upcoming Dates lab #2 reports due by the start of next
Acknowledgment. Process of Atmospheric Radiation. Atmospheric Transmittance. Microwaves used by Radar GMAT Principles of Remote Sensing
 GMAT 9600 Principles of Remote Sensing Week 4 Radar Background & Surface Interactions Acknowledgment Mike Chang Natural Resources Canada Process of Atmospheric Radiation Dr. Linlin Ge and Prof Bruce Forster
GMAT 9600 Principles of Remote Sensing Week 4 Radar Background & Surface Interactions Acknowledgment Mike Chang Natural Resources Canada Process of Atmospheric Radiation Dr. Linlin Ge and Prof Bruce Forster
An Introduction to Geomatics. Prepared by: Dr. Maher A. El-Hallaq خاص بطلبة مساق مقدمة في علم. Associate Professor of Surveying IUG
 An Introduction to Geomatics خاص بطلبة مساق مقدمة في علم الجيوماتكس Prepared by: Dr. Maher A. El-Hallaq Associate Professor of Surveying IUG 1 Airborne Imagery Dr. Maher A. El-Hallaq Associate Professor
An Introduction to Geomatics خاص بطلبة مساق مقدمة في علم الجيوماتكس Prepared by: Dr. Maher A. El-Hallaq Associate Professor of Surveying IUG 1 Airborne Imagery Dr. Maher A. El-Hallaq Associate Professor
RADAR (RAdio Detection And Ranging)
") RADAR (RAdio Detection And Ranging) CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS PASSIVE ACTIVE DIGITAL CAMERA THERMAL (e.g. TIMS) VIDEO CAMERA MULTI- SPECTRAL SCANNERS VISIBLE & NIR MICROWAVE Real
RADAR (RAdio Detection And Ranging) CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS PASSIVE ACTIVE DIGITAL CAMERA THERMAL (e.g. TIMS) VIDEO CAMERA MULTI- SPECTRAL SCANNERS VISIBLE & NIR MICROWAVE Real
FIBER OPTICS. Prof. R.K. Shevgaonkar. Department of Electrical Engineering. Indian Institute of Technology, Bombay. Lecture: 37
 FIBER OPTICS Prof. R.K. Shevgaonkar Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture: 37 Introduction to Raman Amplifiers Fiber Optics, Prof. R.K. Shevgaonkar, Dept.
FIBER OPTICS Prof. R.K. Shevgaonkar Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture: 37 Introduction to Raman Amplifiers Fiber Optics, Prof. R.K. Shevgaonkar, Dept.
Airborne Laser Scanning. Topo-Hydrographic Airborne Laser Scanning System with Online Waveform Processing and Full Waveform Recording
 Topo-Hydrographic Airborne Laser Scanning System with Online Waveform Processing and Full Waveform Recording RIEGL VQ-880-GH designed for combined topographic and hydrographic airborne survey high accuracy
Topo-Hydrographic Airborne Laser Scanning System with Online Waveform Processing and Full Waveform Recording RIEGL VQ-880-GH designed for combined topographic and hydrographic airborne survey high accuracy
Dual Channel Waveform Processing Airborne LiDAR Scanning System for High Point Density and Ultra Wide Area Mapping
 Dual Channel Waveform Processing Airborne LiDAR Scanning System for High Point Density and Ultra Wide Area Mapping RIEGL VQ-156i high laser pulse repetition rate: up to 2 MHz up to 1.33 million measurements
Dual Channel Waveform Processing Airborne LiDAR Scanning System for High Point Density and Ultra Wide Area Mapping RIEGL VQ-156i high laser pulse repetition rate: up to 2 MHz up to 1.33 million measurements
RADIOMETRIC CALIBRATION
 1 RADIOMETRIC CALIBRATION Lecture 10 Digital Image Data 2 Digital data are matrices of digital numbers (DNs) There is one layer (or matrix) for each satellite band Each DN corresponds to one pixel 3 Digital
1 RADIOMETRIC CALIBRATION Lecture 10 Digital Image Data 2 Digital data are matrices of digital numbers (DNs) There is one layer (or matrix) for each satellite band Each DN corresponds to one pixel 3 Digital
Detection of Targets in Noise and Pulse Compression Techniques
 Introduction to Radar Systems Detection of Targets in Noise and Pulse Compression Techniques Radar Course_1.ppt ODonnell 6-18-2 Disclaimer of Endorsement and Liability The video courseware and accompanying
Introduction to Radar Systems Detection of Targets in Noise and Pulse Compression Techniques Radar Course_1.ppt ODonnell 6-18-2 Disclaimer of Endorsement and Liability The video courseware and accompanying
Lecture 12: Curvature and Refraction Radar Equation for Point Targets (Rinehart Ch3-4)
") MET 4410 Remote Sensing: Radar and Satellite Meteorology MET 5412 Remote Sensing in Meteorology Lecture 12: Curvature and Refraction Radar Equation for Point Targets (Rinehart Ch3-4) Radar Wave Propagation
MET 4410 Remote Sensing: Radar and Satellite Meteorology MET 5412 Remote Sensing in Meteorology Lecture 12: Curvature and Refraction Radar Equation for Point Targets (Rinehart Ch3-4) Radar Wave Propagation
Remote sensing of the oceans Active sensing
 Remote sensing of the oceans Active sensing Gravity Sea level Ocean tides Low frequency motion Scatterometry SAR http://daac.gsfc.nasa.gov/campaign_docs/ocdst/what_is_ocean_color.html Shape of the earth
Remote sensing of the oceans Active sensing Gravity Sea level Ocean tides Low frequency motion Scatterometry SAR http://daac.gsfc.nasa.gov/campaign_docs/ocdst/what_is_ocean_color.html Shape of the earth
JP Stevens High School: Remote Sensing
 1 Name(s): ANSWER KEY Date: Team name: JP Stevens High School: Remote Sensing Scoring: Part I - /18 Part II - /40 Part III - /16 Part IV - /14 Part V - /93 Total: /181 2 I. History (3 pts each) 1. What
1 Name(s): ANSWER KEY Date: Team name: JP Stevens High School: Remote Sensing Scoring: Part I - /18 Part II - /40 Part III - /16 Part IV - /14 Part V - /93 Total: /181 2 I. History (3 pts each) 1. What
Lecture 9: Raman lidar
 Lecture 9: Raman lidar Water vapor mixing ratio measured by the SRL during the dryline event. Temporal resolution is 3 minutes, vertical smoothing varied between 90 meters at 0.5 km to 330 meters
Lecture 9: Raman lidar Water vapor mixing ratio measured by the SRL during the dryline event. Temporal resolution is 3 minutes, vertical smoothing varied between 90 meters at 0.5 km to 330 meters
Properties of Structured Light
 Properties of Structured Light Gaussian Beams Structured light sources using lasers as the illumination source are governed by theories of Gaussian beams. Unlike incoherent sources, coherent laser sources
Properties of Structured Light Gaussian Beams Structured light sources using lasers as the illumination source are governed by theories of Gaussian beams. Unlike incoherent sources, coherent laser sources
Remote Sensing. Ch. 3 Microwaves (Part 1 of 2)
") Remote Sensing Ch. 3 Microwaves (Part 1 of 2) 3.1 Introduction 3.2 Radar Basics 3.3 Viewing Geometry and Spatial Resolution 3.4 Radar Image Distortions 3.1 Introduction Microwave (1cm to 1m in wavelength)
Remote Sensing Ch. 3 Microwaves (Part 1 of 2) 3.1 Introduction 3.2 Radar Basics 3.3 Viewing Geometry and Spatial Resolution 3.4 Radar Image Distortions 3.1 Introduction Microwave (1cm to 1m in wavelength)
The V-Line Airborne Laser Scanner RIEGL
 Airborne Laser Scanner with Online Waveform Processing RIEGL VQ-48i high-accuracy ranging based on echo digitization and online waveform processing high laser repetition rate - fast data acquisition multiple
Airborne Laser Scanner with Online Waveform Processing RIEGL VQ-48i high-accuracy ranging based on echo digitization and online waveform processing high laser repetition rate - fast data acquisition multiple
CEGEG046 / GEOG3051 Principles & Practice of Remote Sensing (PPRS) 8: RADAR 1
 8: RADAR 1") CEGEG046 / GEOG3051 Principles & Practice of Remote Sensing (PPRS) 8: RADAR 1 Dr. Mathias (Mat) Disney UCL Geography Office: 113, Pearson Building Tel: 7670 05921 Email: mdisney@ucl.geog.ac.uk www.geog.ucl.ac.uk/~mdisney
CEGEG046 / GEOG3051 Principles & Practice of Remote Sensing (PPRS) 8: RADAR 1 Dr. Mathias (Mat) Disney UCL Geography Office: 113, Pearson Building Tel: 7670 05921 Email: mdisney@ucl.geog.ac.uk www.geog.ucl.ac.uk/~mdisney
Theoretical Simulations of GNSS Reflections from Bare and Vegetated Soils
 Theoretical Simulations of GNSS Reflections from Bare and Vegetated Soils R. Giusto 1, L. Guerriero, S. Paloscia 3, N. Pierdicca 1, A. Egido 4, N. Floury 5 1 DIET - Sapienza Univ. of Rome, Rome DISP -
Theoretical Simulations of GNSS Reflections from Bare and Vegetated Soils R. Giusto 1, L. Guerriero, S. Paloscia 3, N. Pierdicca 1, A. Egido 4, N. Floury 5 1 DIET - Sapienza Univ. of Rome, Rome DISP -
ECE Lecture 32
 ECE 5010 - Lecture 32 1 Microwave Radiometry 2 Properties of a Radiometer 3 Radiometric Calibration and Uncertainty 4 Types of Radiometer Measurements Levis, Johnson, Teixeira (ESL/OSU) Radiowave Propagation
ECE 5010 - Lecture 32 1 Microwave Radiometry 2 Properties of a Radiometer 3 Radiometric Calibration and Uncertainty 4 Types of Radiometer Measurements Levis, Johnson, Teixeira (ESL/OSU) Radiowave Propagation
RIEGL VQ-480-U. Airborne Laser Scanning. Lightweight Airborne Laser Scanner with Online Waveform Processing. visit our website
 Lightweight Airborne Laser Scanner with Online Waveform Processing RIEGL VQ-48-U high-accuracy ranging based on echo digitization and online waveform processing high laser repetition rate - fast data acquisition
Lightweight Airborne Laser Scanner with Online Waveform Processing RIEGL VQ-48-U high-accuracy ranging based on echo digitization and online waveform processing high laser repetition rate - fast data acquisition
Airborne Laser Scanning. Lightweight Airborne Laser Scanner with Online Waveform Processing. visit our website
 Lightweight Airborne Laser Scanner with Online Waveform Processing RIEGL VUX-1LR 15 mm survey-grade accuracy scan speed up to 2 scans / second measurement rate up to 75, meas./sec operating flight altitude
Lightweight Airborne Laser Scanner with Online Waveform Processing RIEGL VUX-1LR 15 mm survey-grade accuracy scan speed up to 2 scans / second measurement rate up to 75, meas./sec operating flight altitude
746A27 Remote Sensing and GIS. Multi spectral, thermal and hyper spectral sensing and usage
 746A27 Remote Sensing and GIS Lecture 3 Multi spectral, thermal and hyper spectral sensing and usage Chandan Roy Guest Lecturer Department of Computer and Information Science Linköping University Multi
746A27 Remote Sensing and GIS Lecture 3 Multi spectral, thermal and hyper spectral sensing and usage Chandan Roy Guest Lecturer Department of Computer and Information Science Linköping University Multi
Module 3 Introduction to GIS. Lecture 8 GIS data acquisition
 Module 3 Introduction to GIS Lecture 8 GIS data acquisition GIS workflow Data acquisition (geospatial data input) GPS Remote sensing (satellites, UAV s) LiDAR Digitized maps Attribute Data Management Data
Module 3 Introduction to GIS Lecture 8 GIS data acquisition GIS workflow Data acquisition (geospatial data input) GPS Remote sensing (satellites, UAV s) LiDAR Digitized maps Attribute Data Management Data
MERLIN Mission Status
 MERLIN Mission Status CNES/illustration David DUCROS, 2016 G. Ehret 1, P. Bousquet 2, B. Millet 3, M. Alpers 1, C. Deniel 3, A. Friker 1, C. Pierangelo 3 1 Deutsches Zentrum für Luft- und Raumfahrt (DLR)
MERLIN Mission Status CNES/illustration David DUCROS, 2016 G. Ehret 1, P. Bousquet 2, B. Millet 3, M. Alpers 1, C. Deniel 3, A. Friker 1, C. Pierangelo 3 1 Deutsches Zentrum für Luft- und Raumfahrt (DLR)
Elham Torabi Supervisor: Dr. Robert Schober
 Low-Rate Ultra-Wideband Low-Power for Wireless Personal Communication Area Networks Channel Models and Signaling Schemes Department of Electrical & Computer Engineering The University of British Columbia
Low-Rate Ultra-Wideband Low-Power for Wireless Personal Communication Area Networks Channel Models and Signaling Schemes Department of Electrical & Computer Engineering The University of British Columbia
Imaging radar Imaging radars provide map-like coverage to one or both sides of the aircraft.
 CEE 6100 / CSS 6600 Remote Sensing Fundamentals 1 Imaging radar Imaging radars provide map-like coverage to one or both sides of the aircraft. Acronyms: RAR real aperture radar ("brute force", "incoherent")
CEE 6100 / CSS 6600 Remote Sensing Fundamentals 1 Imaging radar Imaging radars provide map-like coverage to one or both sides of the aircraft. Acronyms: RAR real aperture radar ("brute force", "incoherent")
Airborne Laser Scanning NEW. Topo-Hydrographic Airborne Laser Scanning System with Online Waveform Processing and Full Waveform Recording
 Topo-Hydrographic Airborne Laser Scanning System with Online Waveform Processing and Full Waveform Recording RIEGL VQ-880-GH designed for combined topographic and hydrographic airborne survey high accuracy
Topo-Hydrographic Airborne Laser Scanning System with Online Waveform Processing and Full Waveform Recording RIEGL VQ-880-GH designed for combined topographic and hydrographic airborne survey high accuracy
Soil Moisture Observation Utilizing Reflected GNSS Signals
 Soil Moisture Observation Utilizing Reflected GNSS Signals GNSS-R Tech in Soil Moisture New Data Processing Method Prof. Dongkai YANG Joint African/Asia-Pacific UN-Regional Centers and International Training
Soil Moisture Observation Utilizing Reflected GNSS Signals GNSS-R Tech in Soil Moisture New Data Processing Method Prof. Dongkai YANG Joint African/Asia-Pacific UN-Regional Centers and International Training
Mobile Laser Scanning. High-Performance LiDAR Sensor for KINEMATIC Laser Scanning. visit our website
 High-Performance LiDAR Sensor for KINEMATIC Laser Scanning RIEGL VUX-1HA very high measurement rate up to 1,, meas./sec very high scan speed up to 25 scans / second 5 mm survey-grade accuracy field of
High-Performance LiDAR Sensor for KINEMATIC Laser Scanning RIEGL VUX-1HA very high measurement rate up to 1,, meas./sec very high scan speed up to 25 scans / second 5 mm survey-grade accuracy field of
Airborne Laser Scanning. Lightweight Airborne Laser Scanner with Online Waveform Processing. visit our website
 Lightweight Airborne Laser Scanner with Online Waveform Processing RIEGL VUX-1LR 15 mm survey-grade accuracy scan speed up to 2 scans / second measurement rate up to 75, meas./sec operating flight altitude
Lightweight Airborne Laser Scanner with Online Waveform Processing RIEGL VUX-1LR 15 mm survey-grade accuracy scan speed up to 2 scans / second measurement rate up to 75, meas./sec operating flight altitude
Range Dependent Turbulence Characterization by Co-operating Coherent Doppler Lidar with Direct Detection Lidar
 Range Dependent Turbulence Characterization by Co-operating Coherent Doppler idar with Direct Detection idar Sameh Abdelazim(a), David Santoro(b), Mark Arend(b), Sam Ahmed(b), and Fred Moshary(b) (a)fairleigh
Range Dependent Turbulence Characterization by Co-operating Coherent Doppler idar with Direct Detection idar Sameh Abdelazim(a), David Santoro(b), Mark Arend(b), Sam Ahmed(b), and Fred Moshary(b) (a)fairleigh
RIEGL VQ-580. Airborne Laser Scanning. Airborne Laser Scanner with Online Waveform Processing. visit our website
 Airborne Laser Scanner with Online Waveform Processing RIEGL VQ-580 especially designed to measure on snow & ice high-accuracy ranging based on echo digitization and online waveform processing high laser
Airborne Laser Scanner with Online Waveform Processing RIEGL VQ-580 especially designed to measure on snow & ice high-accuracy ranging based on echo digitization and online waveform processing high laser
DIGITAL LASER DISTANCE METER
 DIGITAL LASER DISTANCE METER LD05-A10GF with glass-fiber coupled remote optical head The RIEGL LD05-A10GF is a multi-purpose laser distance meter based on precise timeof-flight laser range measurement
DIGITAL LASER DISTANCE METER LD05-A10GF with glass-fiber coupled remote optical head The RIEGL LD05-A10GF is a multi-purpose laser distance meter based on precise timeof-flight laser range measurement
Sampling the World in 3D by Airborne LIDAR Assessing the Information Content of LIDAR Point Clouds
 Sampling the World in 3D by Airborne LIDAR Assessing the Information Content of LIDAR Point Clouds PhoWo 2013 September 11 th, 2013 Stuttgart, Germany Andreas Ullrich RIEGL LMS GmbH sequential data acquisition
Sampling the World in 3D by Airborne LIDAR Assessing the Information Content of LIDAR Point Clouds PhoWo 2013 September 11 th, 2013 Stuttgart, Germany Andreas Ullrich RIEGL LMS GmbH sequential data acquisition
ANALYSIS OF SRTM HEIGHT MODELS
 ANALYSIS OF SRTM HEIGHT MODELS Sefercik, U. *, Jacobsen, K.** * Karaelmas University, Zonguldak, Turkey, ugsefercik@hotmail.com **Institute of Photogrammetry and GeoInformation, University of Hannover,
ANALYSIS OF SRTM HEIGHT MODELS Sefercik, U. *, Jacobsen, K.** * Karaelmas University, Zonguldak, Turkey, ugsefercik@hotmail.com **Institute of Photogrammetry and GeoInformation, University of Hannover,
INTRODUCTION TO DUAL-POL WEATHER RADARS. Radar Workshop / 09 Nov 2017 Monash University, Australia
 INTRODUCTION TO DUAL-POL WEATHER RADARS Radar Workshop 2017 08 / 09 Nov 2017 Monash University, Australia BEFORE STARTING Every Radar is polarimetric because of the polarimetry of the electromagnetic waves
INTRODUCTION TO DUAL-POL WEATHER RADARS Radar Workshop 2017 08 / 09 Nov 2017 Monash University, Australia BEFORE STARTING Every Radar is polarimetric because of the polarimetry of the electromagnetic waves
Introduction to Remote Sensing. Electromagnetic Energy. Data From Wave Phenomena. Electromagnetic Radiation (EMR) Electromagnetic Energy
 Electromagnetic Energy") A Basic Introduction to Remote Sensing (RS) ~~~~~~~~~~ Rev. Ronald J. Wasowski, C.S.C. Associate Professor of Environmental Science University of Portland Portland, Oregon 1 September 2015 Introduction
A Basic Introduction to Remote Sensing (RS) ~~~~~~~~~~ Rev. Ronald J. Wasowski, C.S.C. Associate Professor of Environmental Science University of Portland Portland, Oregon 1 September 2015 Introduction
Remote Sensing for Epidemiological Studies
 Remote Sensing for Epidemiological Studies Joint ICTP-IAEA Conference on Predicting Disease Patterns According to Climate Changes The Abdus Salam International Centre for Theoretical Physics 12-14 May
Remote Sensing for Epidemiological Studies Joint ICTP-IAEA Conference on Predicting Disease Patterns According to Climate Changes The Abdus Salam International Centre for Theoretical Physics 12-14 May
Bistatic/Monostatic Synthetic Aperture Radar for Ice Sheet Measurements
 Bistatic/Monostatic Snthetic Aperture Radar for Ice Sheet Measurements John Paden MS Thesis Defense April 18, 003 Committee Chairperson: Dr. Chris Allen Committee Members: Dr. Prasad Gogineni Dr. Glenn
Bistatic/Monostatic Snthetic Aperture Radar for Ice Sheet Measurements John Paden MS Thesis Defense April 18, 003 Committee Chairperson: Dr. Chris Allen Committee Members: Dr. Prasad Gogineni Dr. Glenn
Final Examination. 22 April 2013, 9:30 12:00. Examiner: Prof. Sean V. Hum. All non-programmable electronic calculators are allowed.
 UNIVERSITY OF TORONTO FACULTY OF APPLIED SCIENCE AND ENGINEERING The Edward S. Rogers Sr. Department of Electrical and Computer Engineering ECE 422H1S RADIO AND MICROWAVE WIRELESS SYSTEMS Final Examination
UNIVERSITY OF TORONTO FACULTY OF APPLIED SCIENCE AND ENGINEERING The Edward S. Rogers Sr. Department of Electrical and Computer Engineering ECE 422H1S RADIO AND MICROWAVE WIRELESS SYSTEMS Final Examination
Comprehensive Vicarious Calibration and Characterization of a Small Satellite Constellation Using the Specular Array Calibration (SPARC) Method
 Method") This document does not contain technology or Technical Data controlled under either the U.S. International Traffic in Arms Regulations or the U.S. Export Administration Regulations. Comprehensive Vicarious
This document does not contain technology or Technical Data controlled under either the U.S. International Traffic in Arms Regulations or the U.S. Export Administration Regulations. Comprehensive Vicarious
Please insert a picture (Insert, Picture, from file). Size according to grey field (10 cm x 25.4 cm). Scale picture: highlight, pull corner point
. Size according to grey field (10 cm x 25.4 cm). Scale picture: highlight, pull corner point") Please insert a picture (Insert, Picture, from file). Size according to grey field (10 cm x 25.4 cm). Scale picture: highlight, pull corner point Cut picture: highlight, choose the cutting icon from the
Please insert a picture (Insert, Picture, from file). Size according to grey field (10 cm x 25.4 cm). Scale picture: highlight, pull corner point Cut picture: highlight, choose the cutting icon from the
Mobile Radio Propagation: Small-Scale Fading and Multi-path
 Mobile Radio Propagation: Small-Scale Fading and Multi-path 1 EE/TE 4365, UT Dallas 2 Small-scale Fading Small-scale fading, or simply fading describes the rapid fluctuation of the amplitude of a radio
Mobile Radio Propagation: Small-Scale Fading and Multi-path 1 EE/TE 4365, UT Dallas 2 Small-scale Fading Small-scale fading, or simply fading describes the rapid fluctuation of the amplitude of a radio
Outline: Introduction: What is SPM, history STM AFM Image treatment Advanced SPM techniques Applications in semiconductor research and industry
 1 Outline: Introduction: What is SPM, history STM AFM Image treatment Advanced SPM techniques Applications in semiconductor research and industry 2 Back to our solutions: The main problem: How to get nm
1 Outline: Introduction: What is SPM, history STM AFM Image treatment Advanced SPM techniques Applications in semiconductor research and industry 2 Back to our solutions: The main problem: How to get nm
Photonic-based spectral reflectance sensor for ground-based plant detection and weed discrimination
 Research Online ECU Publications Pre. 211 28 Photonic-based spectral reflectance sensor for ground-based plant detection and weed discrimination Arie Paap Sreten Askraba Kamal Alameh John Rowe 1.1364/OE.16.151
Research Online ECU Publications Pre. 211 28 Photonic-based spectral reflectance sensor for ground-based plant detection and weed discrimination Arie Paap Sreten Askraba Kamal Alameh John Rowe 1.1364/OE.16.151