Prof. Trevor Darrell Lecture 23: Segmentation II & Computational Photography Teaser
|
|
|
- Sharon Woods
- 5 years ago
- Views:
Transcription
1 C280, Computer Vision Prof. Trevor Darrell Lecture 23: Segmentation II & Computational Photography Teaser

2 Two presentations today:
3 Contours and Junctions in Natural Images Jitendra Malik University of California at Berkeley (with Jianbo Shi, Thomas Leung, Serge Belongie, Charless Fowlkes, David Martin, Xiaofeng Ren, Michael Maire, Pablo Arbelaez) 3




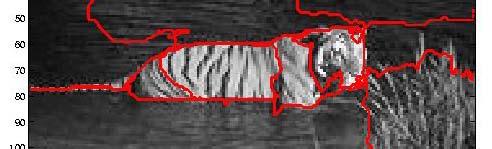
4 From Pixels to Perception Water Tiger Grass outdoor wildlife Sand back Tiger head eye tail legs mouth shadow 4

5 I stand at the window and see a house, trees, sky. Theoretically I might say there were 327 brightnesses and nuances of colour. Do I have "327"? No. I have sky, house, and trees Max Wertheimer,


6 Perceptual Organization Grouping Figure/Ground 6
7 Key Research Questions in Perceptual Predictive power Organization Factors for complex, natural stimuli? How do they interact? Functional significance Why should these be useful or confer some evolutionary advantage to a visual organism? Brain mechanisms How are these factors implemented given what we know about V1 and higher visual areas? 7
8 Attneave s Cat (1954) Line drawings convey most of the information 8
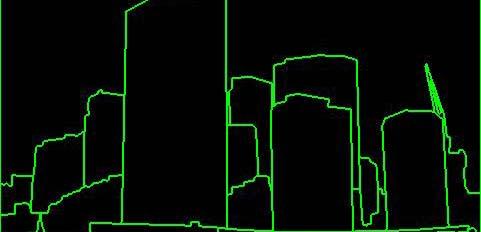
9 Contours and junctions are fundamental Key to recognition, inference of 3D scene properties, visually- guided manipulation and locomotion This goes beyond local, V1-like, edge-detection. Contours are the result of perceptual organization, grouping and figure/ground processing 9
10 Some computer vision history Local Edge Detection was much studied in the 1970s and early 80s (Sobel, Rosenfeld, Binford- Horn, Marr-Hildreth, Canny ) Edge linking exploiting curvilinear continuity was studied as well (Rosenfeld, Zucker, Horn, Ullman ) In the 1980s, several authors argued for perceptual organization as a precursor to recognition (Binford, Witkin and Tennebaum, Lowe, Jacobs ) 10
11 However in the 90s 1. We realized that there was more to images than edges Biologically inspired filtering approaches (Bergen & Adelson, Malik & Perona..) Pixel based representations for recognition (Turk & Pentland, Murase & Nayar, LeCun ) 2. We lost faith in the ability of bottom-up vision Do minimal bottom up processing, e.g. tiled orientation histograms don t even assume that linked contours or junctions can be extracted Matching with memory of previously seen objects then becomes the primary engine for parsing an image.? 11
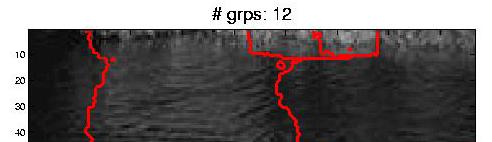
12 At Berkeley, we took a contrary view 1. Collect Data Set of Human segmented images 2. Learn Local Boundary Model for combining brightness, color and texture 3. Global framework to capture closure, continuity 4. Detect and localize junctions 5. Integrate low, mid and high-level information for grouping and figure-ground segmentation 12














13 Berkeley Segmentation DataSet [BSDS] D. Martin, C. Fowlkes, D. Tal, J. Malik. "A Database of Human Segmented Natural Images and its Application to Evaluating Segmentation Algorithms and Measuring Ecological Statistics", ICCV,
14 14
15 Contour detection ~
16 Contour detection ~
17 Contour detection ~

18 Contour detection ~2008 (gray) 18

")
19 Contour detection ~2008 (color) 19
20 Outline 1. Collect Data Set of Human segmented images 2. Learn Local Boundary Model for combining brightness, color and texture 3. Global framework to capture closure, continuity 4. Detect and localize junctions 5. Integrate low, mid and high-level information for grouping and figure-ground segmentation 20
21 Contours can be defined by any of a number of cues (P. Cavanagh) 21






22 Cue-Invariant Representations Gray level photographs Objects from motion Objects from luminance Objects from disparity Line drawings Objects from texture Grill-Spector et al., Neuron



 from")
23 Image Martin, Fowlkes, Malik PAMI 04 Boundary Cues Cue Combination Brightness P b Color Model Texture Challenges: texture cue, cue combination Goal: learn the posterior probability bili of a boundary P b (x,y, ) from local information only 23
24 Individual Features 1976 CIE L*a*b* colorspace Brightness Gradient BG(x,y,r, ) Difference of L* distributions Color Gradient CG(x,y,r, ) Difference of a*b* distributions (x,y) r Texture Gradient TG(x,y,r, ) Difference of distributions of V1-like filter responses These are combined using logistic regression 24
25 Various Cue Combinations 25
26 Outline 1. Collect Data Set of Human segmented images 2. Learn Local Boundary Model for combining brightness, color and texture 3. Global framework to capture closure, continuity 4. Detect and localize junctions 5. Integrate low, mid and high-level information for grouping and figure-ground segmentation 26
27 Exploiting global constraints: Image Segmentation as Graph Partitioning Build a weighted graph G=(V,E) from image V: image pixels E: connections between pairs of nearby pixels Partition graph so that similarity within group is large and similarity between groups is small -- Normalized Cuts [Shi & Malik 97] 27
28 Wij small when intervening contour strong, small when weak.. Cij = max Pb(x,y) for (x,y) on line segment ij; Wij = exp ( - Cij / 28





29 Eigenvectors carry contour information 29







30 We do not try to find regions from the eigenvectors, so we avoid the broken sky artifacts of Ncuts 30
31 Key idea compute edges on ncut eigenvectors, sum over first k: where is the output of a Gaussian derivative on the j-th eigenvector of 31
32 The Benefits of Globalization Maire, Arbelaez, Fowlkes, Malik, CVPR 08 32

33 Comparison to other approaches 33
34 34
35 Outline 1. Collect Data Set of Human segmented images 2. Learn Local Boundary Model for combining brightness, color and texture 3. Global framework to capture closure, continuity 4. Detect and localize junctions 5. Integrate low, mid and high-level information for grouping and figure-ground segmentation 35
36 Detecting Junctions 36
37 37
38 Benchmarking corner detection 38
39 39
40 Better object recognition using previous version of Pb Ferrari, Fevrier, Jurie and Schmid (PAMI 08) Shotton, Blake and Cipolla (PAMI 08) 40
41 Outline 1. Collect Data Set of Human segmented images 2. Learn Local Boundary Model for combining brightness, color and texture 3. Global l framework to capture closure, continuity it 4. Detect and localize junctions 5. Integrate low, mid and high-level cues for grouping and figure-ground segmentation 1. Ren, Fowlkes, Malik, IJCV Fowlkes, Martin, Malik, JOV Ren, Fowlkes, Malik, ECCV 06 41
42 Power laws for contour lengths 42
43 Convexity [Metzger 1953, Kanizsa and Gerbino 1976] Conv G = percentage of straight lines that lie completely within region G G p F Convexity(p) = log(conv F / Conv G ) 43
44 Figural regions tend to be convex 44

 = θ G")
45 Lower Region [Vecera, Vogel & Woodman 2002] θ p center of mass LowerRegion(p) = θ G 45
46 Figural regions tend to lie below ground regions 46
47 Ren, Fowlkes, Malik ECCV 06 Object and Scene Recognition Grouping / Segmentation Figure/Ground Organization Human subjects label groundtruth figure/ground assignments in natural images. Shapemes encode high-level knowledge in a generic way, capturing local figure/ground cues. A conditional random field incorporates junction cues and enforces global consistency. 47
48 Forty yyears of contour detection Roberts Sobel Prewitt Marr Canny Perona Martin Maire (1965) (1968) (1970) Hildreth (1986) Malik (1980) (1990) Fowlkes Malik (2004) Arbelaez Fowlkes Malik (2008) 48
49 Forty yyears of contour detection Roberts Sobel Prewitt Marr Canny Perona Martin Maire (1965) (1968) (1970) Hildreth (1986) Malik (1980) (1990) Fowlkes Malik (2004) Arbelaez Fowlkes Malik (2008)??? (2013) 49
50 Curvilinear Grouping Boundaries are smooth in nature! A number of associated visual phenomena Good continuation Visual completion Illusory contours 50
51 51
52 Computational Photography Computer Vision CSE 576, Spring 2008 Richard Szeliski Microsoft Research
53 Computational ti Photography h photometric camera calibration high-dynamic range imaging & tone mapping flash photography h Richard Szeliski Computational Photography 53
54 Readings Debevec and Malik, Recovering High Dynamic Range Radiance Maps from Photographs. In SIGGRAPH 97. S. B. Kang et al. High dynamic range video. SIGGRAPH D. Lischinski. Interactive local adjustment of tonal values. SIGGRAPH G. Petschnigg et al. Digital photography with flash and no-flash image pairs. SIGGRAPH P. Pérez et al. Poisson image editing. SIGGRAPH 2003 Richard Szeliski Computational Photography 54


55 Sources Some of my slides are from: Bill Freeman and Frédo Durand Richard Szeliski Computational Photography 55
 Efros")

56 Sources Some of my slides are from: Alexei (Alyosha) Efros cmu Richard Szeliski Computational Photography 56
57 But first, for something (a little) different


58 Panography - Richard Szeliski Computational Photography 58




59 Panography - Richard Szeliski Computational Photography 59
60 Panography What kind of motion model? What kind of compositing? Can you do global alignment? Richard Szeliski Computational Photography 60
61 High Dynamic Range Imaging (HDR) slides borrowed from : Computational Photography Alexei Efros, CMU, Fall 2007, Paul Debevec, and my talks



62 Problem: Dynamic Range The real world is high dynamic range. 25, ,000 2,000,000,000 Richard Szeliski Computational Photography 62






63 Problem: Dynamic Range Typical cameras have limited dynamic range What can we do? Solution: merge multiple exposures Richard Szeliski Computational Photography 63
64 Varying Exposure Richard Szeliski Computational Photography 64
65 HDR images multiple l inputs Pixel count Radiance Richard Szeliski Computational Photography 65
66 HDR images merged Pixel count Radiance Richard Szeliski Computational Photography 66
67 Camera is not a photometer! t Limited dynamic range Use multiple exposures? Unknown, nonlinear response Not possible to convert pixel values to radiance Solution: Recover response curve from multiple exposures, then reconstruct the radiance map Richard Szeliski Computational Photography 67
68 Imaging system response function 255 Pixel value 0 log Exposure = log (Radiance * t) (CCD photon count)
69 Camera Calibration Geometric How pixel coordinates relate to directions in the world Photometric How pixel values relate to radiance amounts in the world Per-pixel transfer and blur Richard Szeliski Computational Photography 69
70 Camera sensing pipeline Camera Irradiance Optics Aperture Shutter Camera Body Sensor (CCD/CMOS) Gain (ISO) A / D RAW Sensor chip Demosaic (Sharpen) White Balance Gamma/curve Compress JPEG DSP Richard Szeliski Computational Photography 70
71 Camera sensing pipeline Camera Irradiance Optics Aperture Shutter Blur kern. & RD F-stop Camera & Body Vignette Exposure T Sensor (CCD/CMOS) Gain (ISO) A / D RAW AA CFA Noise ISO Sensor Gainchip Q1 Demosaic? (Sharpen)? White Balance Gamma/curve Compress JPEG RGB Gain DSP Q2 Richard Szeliski Computational Photography 71
72 Recovering High Dynamic Range Radiance Maps from Photographs Paul Debevec Jitendra Malik Computer Science Division University of California at Berkeley SIGGRAPH 97, August 1997
 Filters Richard Szeliski Computational")
73 Ways to vary exposure Shutter Speed (*) F/stop (aperture, iris) Neutral Density (ND) Filters Richard Szeliski Computational Photography 73
74 Shutter Speed Ranges: Canon D30: 30 to 1/4,000 sec. (1997) Sony VX2000: ¼ to 1/10,000 sec. Pros: Directly varies the exposure Usually accurate and repeatable Issues: Noise in long exposures Richard Szeliski Computational Photography 74
75 Shutter Speed Note: shutter times usually obey a power series each stop is a factor of 2 ¼, 1/8, 1/15, 1/30, 1/60, 1/125, 1/250, 1/500, 1/1000 sec Usually really is: ¼, 1/8, 1/16, 1/32, 1/64, 1/128, 1/256, 1/512, 1/1024 sec Richard Szeliski Computational Photography 75
 Exposure = Radiance t log Exposure = log Radiance log t Richard Szeliski Computational Photography")
76 The Algorithm t t = t t = t t = t t = t t = 1/64 sec 1/16 sec 1/4 sec 1 sec 4 sec Pixel Value Z = f(exposure) Exposure = Radiance t log Exposure = log Radiance log t Richard Szeliski Computational Photography 76
77 Response Curve Assuming unit radiance for each pixel After adjusting radiances to obtain a smooth response curve ixel valu ue P Pixel valu ue log Exposure log Exposure Richard Szeliski Computational Photography 77
78 The Math Let g(z) be the discrete inverse response function For each pixel site i in each image j, want: ln Radiance i ln t j g(z ij ) Solve the over-determined d linear system: N P Z max ln Radiance 2 2 i ln t j g(z ij ) g (z) i 1 j 1 z Z min fitting i term smoothness term Richard Szeliski Computational Photography 78
79 MatLab code function [g,le]=gsolve(z,b,l,w) n = 256; A = zeros(size(z,1)*size(z,2)+n+1,n+size(z,1)); b = zeros(size(a,1),1); k = 1; %% Include the data-fitting equations for i=1:size(z,1) for j=1:size(z,2) wij = w(z(i,j)+1); A(k,Z(i,j)+1) = wij; A(k,n+i) = -wij; b(k,1) = wij * B(i,j); k=k+1; end end A(k,129) = 1; %% Fix the curve by setting its middle value to 0 k=k+1; k+1 for i=1:n-2 %% Include the smoothness equations A(k,i)=l*w(i+1); A(k,i+1)=-2*l*w(i+1); A(k,i+2)=l*w(i+1); k=k+1; end x = A\b; %% Solve the system using SVD Richard Szeliski Computational Photography 79 g = x(1:n); le = x(n+1:size(x,1));




80 Results: digital it camera Kodak DCS460 1/30 to 30 sec Recovered response curve Pi ixel val lue Richard Szeliski Computational Photography log Exposure 80




81 Reconstructed t Radiance Map Richard Szeliski Computational Photography 81



82 Results: Color Film Kodak Gold ASA 100, PhotoCD Richard Szeliski Computational Photography 82



83 Recovered Response Curves Red Green Blue RGB Richard Szeliski Computational Photography 83





84 The Radiance Map Richard Szeliski Computational Photography 84
85 The Radiance Map Linearly scaled to display device Richard Szeliski Computational Photography 85
86 Portable FloatMap (.pfm) 12 bytes per pixel, 4 for each channel sign exponent mantissa Text header similar to Jeff Poskanzer s.ppm image format: Floating Point TIFF similar PF <binary image data> Richard Szeliski Computational Photography 86
87 Radiance Format (.pic,.hdr) 32 bits / pixel Red Green Blue Exponent (145, 215, 87, 149) = (145, 215, 87, 103) = (145, 215, 87) * 2^( ) = (145, 215, 87) * 2^( ) = ( , , ) ( , , ) Ward, Greg. "Real Pixels," in Graphics Gems IV, edited by James Arvo, Academic Press, 1994 Richard Szeliski Computational Photography 87
88 ILM s OpenEXR (.exr) 6 bytes per pixel, 2 for each channel, compressed sign exponent mantissa Several lossless compression options, 2:1 typical Compatible with the half datatype in NVidia's Cg Supported natively on GeForce FX and Quadro FX Available at Richard Szeliski Computational Photography 88
89 High Dynamic Range Video Sing Bing Kang, Matt Uyttendaele, Simon Winder, Rick Szeliski [SIGGRAPH 2003]

90 HDR images merged Pixel count Radiance Richard Szeliski Computational Photography 90
")
91 What about scene motion? Inputs Tonemapped output (no compensation or consistency ste cy check) Richard Szeliski Computational Photography 91
 Richard Szeliski Computational")
92 With motion compensation Inputs Tonemapped output (global+local compensation) Richard Szeliski Computational Photography 92





93 Registration ti (global) l) After global registration Richard Szeliski Computational Photography 93
 After local")

94 Registration ti (local) l) After local registration Richard Szeliski Computational Photography 94





95 Now What? Richard Szeliski Computational Photography 95
96 Tone Mapping
97 Tone Mapping How can we do this? Real World Ray Traced World (Radiance) Linear scaling?, thresholding? Suggestions? 10-6 High dynamic range 10 6 Display/ Printer to 255 Richard Szeliski Computational Photography 97
98 Simple Global l Operator Compression curve needs to Bring everything within range Leave dark areas alone In other words Asymptote at 255 Derivative of 1 at 0 Richard Szeliski Computational Photography 98
99 Global l Operator (Reinhart et al) L display L 1 L world world Richard Szeliski Computational Photography 99








100 Global l Operator Results Richard Szeliski Computational Photography 100




101 Reinhart Operator Darkest 0.1% scaled to display device Richard Szeliski Computational Photography 101




102 What do we see? Vs. Richard Szeliski Computational Photography 102
103 What does the eye sees? The eye has a huge dynamic range Do we see a true radiance map? Richard Szeliski Computational Photography 103
104 Metamores Can we use this for range compression? Richard Szeliski Computational Photography 104
105 Fast bilateral filtering for the display of high-dynamic-range images Frédo Durand and Julie Dorsey SIGGRAPH 2002.





106 Input Naïve: Gamma compression X X colors are washed-out. Why? Gamma Richard Szeliski Computational Photography 106






107 Gamma compression on intensity it Colors are OK, details are blurred Intensity Gamma on intensity Color Richard Szeliski Computational Photography 107
108 Oppenheim 1968, Chiu et al Reduce contrast of low-frequencies, keep high Low-freq. Reduce low frequency High-freq. Color Richard Szeliski Computational Photography 108

109 Halos Strong edges contain high frequency Low-freq. Reduce low frequency High-freq. Color Richard Szeliski Computational Photography 109
110 Our approach Do not blur across edges: non-linear filtering Large-scale Output Detail Color Richard Szeliski Computational Photography 110
111 Bilateral l filter Tomasi and Manduci Related to SUSAN filter [Smith and Brady 95] Digital-TV [Chan, Osher and Chen 2001] sigma filter Richard Szeliski Computational Photography 111




112 Start t with Gaussian filteringi Output t is blurred J f I output input Richard Szeliski Computational Photography 112



 g( I(")
 ( ) x x")


113 Bilateral l filtering i is non-linear The weights are different for each output t pixel 1 J (x) f ( x, ) g( I( ) I( x)) I( ) k(x) ( ) x x output input Richard Szeliski Computational Photography 113



114 Other view The bilateral filter uses the 3D distance Richard Szeliski Computational Photography 114






115 Contrast reduction Input HDR image Output Intensity Large scale Reduce Large scale contrast Fast Bilateral Filter Detail Preserve! Detail Color Color Richard Szeliski Computational Photography 115
116 Dynamic range reduction To reduce contrast of base layer scale in the log domain exponent in linear Set a target range: log 10 (5) Compute range in the log layer: (max-min) Deduce using divisioni i Normalize so that the biggest value in the (linear) base is 1 (0 in log): offset the compressed based by its max Richard Szeliski Computational Photography 116



117 Summary of approach Do not blur base/gain layer: non-linear filtering Large-scale Output Detail Color Richard Szeliski Computational Photography 117
118 Gradient domain high dynamic range compression Raanan Fattal, Dani Lischinski, and Michael Werman SIGGRAPH 2002.
119 Gradient Tone Mapping Slide from Siggraph 2005 by Raskar (Graphs by Fattal et al.) Richard Szeliski Computational Photography 119
120 Gradient attenuation ti From Fattal et al. Richard Szeliski Computational Photography 120
121 Interactive Local Adjustment of Tonal Values Dani Lischinski Zeev Farbman The Hebrew University Matt Uyttendaele Rick Szeliski Microsoft Research SIGGRAPH 2006




122 Tonal Manipulation brightness exposure contrast saturation color temperature Richard Szeliski Computational Photography 122
123 Interpretation 1: Richard Szeliski Computational Photography 123
124 Interpretation 2: Richard Szeliski Computational Photography 124
125 Interpretation 3: Richard Szeliski Computational Photography 125
126 This Work is About: New tool for interactive e tonal manipulation: developing negatives in the digital darkroom. Target material: HDR images: the ultimate digital negative. Camera RAW images: the most common digital negative. Ordinary snapshots. Richard Szeliski Computational Photography 126
127 Existing Tools Automatic tone mapping algorithms Why do we need yet another tone mapping approach? Why interactive rather than automatic? Image manipulation and editing packages, e.g., Adobe Photoshop. Richard Szeliski Computational Photography 127


128 Tone Reproduction Operators Bilateral Filtering Gradient Domain Photographic Durand & Dorsey 2002 Fattal et al Reinhard et al Richard Szeliski Computational Photography 128



129 Automatic ti vs. Interactive ti Bilateral Filtering Interactive Tone Photographic Durand & Dorsey 2002 Mapping Reinhard et al Richard Szeliski Computational Photography 129
130 Automatic ti vs. Interactive ti Existing automatic TM operators are black boxes No direct control over the outcome No local adjustment Not suitable for creative/artistic work Results do not always look photographic Most operators not really automatic Richard Szeliski Computational Photography 130
131 But What About Photoshop? h You can do just about everything er Adjustment Layers Layer Masks Select regions Paint blending weights but you need a lot of experience, patience, and time! Richard Szeliski Computational Photography 131










132 Example 15 minutes in Photoshop: Our 3 minutes: approach Richard Szeliski Computational Photography 132
133 Approach User indicates regions using scribbles. User adjusts tonal values using sliders. Scribbles + tonal values are interpreted as soft constraints. t Optimization framework propagates the constraints to the entire image. Richard Szeliski Computational Photography 133




134 User interface Richard Szeliski Computational Photography 134
135 Input: constraints t +0.5 f-stops -10f-stops f-stops +1.2 f-stops Richard Szeliski Computational Photography 135
136 Result: adjustment t map Richard Szeliski Computational Photography 136

137 Constraint t Propagation Approximate constraints with a function whose smoothness is determined by underlying image: data term smoothness term Our smoothness term: Richard Szeliski Computational Photography 137
138 Influence Functions Richard Szeliski Computational Photography 138












139 Influence Functions Richard Szeliski Computational Photography 139
140 Automatic ti Initialization Inspired by Ansel Adams Zone System. Segment image (very crudely) into brightness zones Determine the desired exposure for each zone Let the image-guided optimization produce a piecewise smooth exposure map Richard Szeliski Computational Photography 140




141 Results Automatic ti mode Richard Szeliski Computational Photography 141
142 Results Automatic ti Mode Richard Szeliski Computational Photography 142







143 Results Automatic ti mode Richard Szeliski Computational Photography 143







144 Richard Szeliski Computational Photography 144
145 Richard Szeliski Computational Photography 145





146 Richard Szeliski Computational Photography 146
147 Snapshot Enhancement Richard Szeliski Computational Photography 147
148 Snapshot Enhancement Richard Szeliski Computational Photography 148
149 Spatially Variant White Balance Richard Szeliski Computational Photography 149
150 Comparison of tone mappers Durand and Dorsey. Fast bilateral filtering for the display of high-dynamic-range images. SIGGRAPH Fattal, Lischinski, and Werman. Gradient domain high dynamic range compression. SIGGRAPH Li, Sharan, and Adelson. Compressing and Companding High Dynamic Range Images with Subband Architectures. SIGGRAPH Richard Szeliski Computational Photography 150











151 Li et al Fattal et al Lischinski et al Reinhard et al Durand & Dorsey 2002 Richard Szeliski Computational Photography 151
152 Merging flash and non-flash images Georg Petschnigg, Maneesh Agrawala, Hugues Hoppe, Rick Szeliski, Michael Cohen, Kentaro Toyama [SIGGRAPH 2004]
153 Flash + non-flash images Flash photos have less noise, more detail Non-flash photos have better color Idea: merge them togetherth But how? + = non-flash flash merged Richard Szeliski Computational Photography 153




154 Flash + non-flash images Smooth non-flash photo using flash photo s edge information Add high-frequency details from flash image + = non-flash flash merged Richard Szeliski Computational Photography 154




155 Joint bilateral l filter Richard Szeliski Computational Photography 155
156 Bilateral l detail filter Richard Szeliski Computational Photography 156




157 Final result merged non-flash Richard Szeliski Computational Photography 157
158
159 Image Formation Color Filters Pyramids Local Features Texture Alignment Flow Stereo SFM Coda Recognition Intro. Topic Models Recognition Kernels Voting and Parts Context Articulated Recognition Photometric Stereo Tracking MRFS Segmentation Comp. Photography
High Dynamic Range Images : Rendering and Image Processing Alexei Efros. The Grandma Problem
 High Dynamic Range Images 15-463: Rendering and Image Processing Alexei Efros The Grandma Problem 1 Problem: Dynamic Range 1 1500 The real world is high dynamic range. 25,000 400,000 2,000,000,000 Image
High Dynamic Range Images 15-463: Rendering and Image Processing Alexei Efros The Grandma Problem 1 Problem: Dynamic Range 1 1500 The real world is high dynamic range. 25,000 400,000 2,000,000,000 Image
! High&Dynamic!Range!Imaging! Slides!from!Marc!Pollefeys,!Gabriel! Brostow!(and!Alyosha!Efros!and! others)!!
!!") ! High&Dynamic!Range!Imaging! Slides!from!Marc!Pollefeys,!Gabriel! Brostow!(and!Alyosha!Efros!and! others)!! Today! High!Dynamic!Range!Imaging!(LDR&>HDR)! Tone!mapping!(HDR&>LDR!display)! The!Problem!
! High&Dynamic!Range!Imaging! Slides!from!Marc!Pollefeys,!Gabriel! Brostow!(and!Alyosha!Efros!and! others)!! Today! High!Dynamic!Range!Imaging!(LDR&>HDR)! Tone!mapping!(HDR&>LDR!display)! The!Problem!
The Dynamic Range Problem. High Dynamic Range (HDR) Multiple Exposure Photography. Multiple Exposure Photography. Dr. Yossi Rubner.
 Multiple Exposure Photography. Multiple Exposure Photography. Dr. Yossi Rubner.") The Dynamic Range Problem High Dynamic Range (HDR) starlight Domain of Human Vision: from ~10-6 to ~10 +8 cd/m moonlight office light daylight flashbulb 10-6 10-1 10 100 10 +4 10 +8 Dr. Yossi Rubner yossi@rubner.co.il
The Dynamic Range Problem High Dynamic Range (HDR) starlight Domain of Human Vision: from ~10-6 to ~10 +8 cd/m moonlight office light daylight flashbulb 10-6 10-1 10 100 10 +4 10 +8 Dr. Yossi Rubner yossi@rubner.co.il
High dynamic range imaging
 High dynamic range imaging Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/6 with slides by Fedro Durand, Brian Curless, Steve Seitz and Alexei Efros Announcements Assignment #1 announced on
High dynamic range imaging Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/6 with slides by Fedro Durand, Brian Curless, Steve Seitz and Alexei Efros Announcements Assignment #1 announced on
High dynamic range imaging
 Announcements High dynamic range imaging Digital Visual Effects, Spring 27 Yung-Yu Chuang 27/3/6 Assignment # announced on 3/7 (due on 3/27 noon) TA/signup sheet/gil/tone mapping Considered easy; it is
Announcements High dynamic range imaging Digital Visual Effects, Spring 27 Yung-Yu Chuang 27/3/6 Assignment # announced on 3/7 (due on 3/27 noon) TA/signup sheet/gil/tone mapping Considered easy; it is
High dynamic range imaging and tonemapping
 High dynamic range imaging and tonemapping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 12 Course announcements Homework 3 is out. - Due
High dynamic range imaging and tonemapping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 12 Course announcements Homework 3 is out. - Due
HDR imaging and the Bilateral Filter
 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography HDR imaging and the Bilateral Filter Bill Freeman Frédo Durand MIT - EECS Announcement Why Matting Matters Rick Szeliski
6.098 Digital and Computational Photography 6.882 Advanced Computational Photography HDR imaging and the Bilateral Filter Bill Freeman Frédo Durand MIT - EECS Announcement Why Matting Matters Rick Szeliski
Cameras. Outline. Pinhole camera. Camera trial #1. Pinhole camera Film camera Digital camera Video camera High dynamic range imaging
 Outline Cameras Pinhole camera Film camera Digital camera Video camera High dynamic range imaging Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2006/3/1 with slides by Fedro Durand, Brian Curless,
Outline Cameras Pinhole camera Film camera Digital camera Video camera High dynamic range imaging Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2006/3/1 with slides by Fedro Durand, Brian Curless,
High Dynamic Range Imaging
 High Dynamic Range Imaging 1 2 Lecture Topic Discuss the limits of the dynamic range in current imaging and display technology Solutions 1. High Dynamic Range (HDR) Imaging Able to image a larger dynamic
High Dynamic Range Imaging 1 2 Lecture Topic Discuss the limits of the dynamic range in current imaging and display technology Solutions 1. High Dynamic Range (HDR) Imaging Able to image a larger dynamic
Realistic Image Synthesis
 Realistic Image Synthesis - HDR Capture & Tone Mapping - Philipp Slusallek Karol Myszkowski Gurprit Singh Karol Myszkowski LDR vs HDR Comparison Various Dynamic Ranges (1) 10-6 10-4 10-2 100 102 104 106
Realistic Image Synthesis - HDR Capture & Tone Mapping - Philipp Slusallek Karol Myszkowski Gurprit Singh Karol Myszkowski LDR vs HDR Comparison Various Dynamic Ranges (1) 10-6 10-4 10-2 100 102 104 106
Tone mapping. Digital Visual Effects, Spring 2009 Yung-Yu Chuang. with slides by Fredo Durand, and Alexei Efros
 Tone mapping Digital Visual Effects, Spring 2009 Yung-Yu Chuang 2009/3/5 with slides by Fredo Durand, and Alexei Efros Tone mapping How should we map scene luminances (up to 1:100,000) 000) to display
Tone mapping Digital Visual Effects, Spring 2009 Yung-Yu Chuang 2009/3/5 with slides by Fredo Durand, and Alexei Efros Tone mapping How should we map scene luminances (up to 1:100,000) 000) to display
Tonemapping and bilateral filtering
 Tonemapping and bilateral filtering http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 6 Course announcements Homework 2 is out. - Due September
Tonemapping and bilateral filtering http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 6 Course announcements Homework 2 is out. - Due September
Burst Photography! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 7! Gordon Wetzstein! Stanford University!
 Burst Photography! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 7! Gordon Wetzstein! Stanford University! Motivation! wikipedia! exposure sequence! -4 stops! Motivation!
Burst Photography! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 7! Gordon Wetzstein! Stanford University! Motivation! wikipedia! exposure sequence! -4 stops! Motivation!
Denoising and Effective Contrast Enhancement for Dynamic Range Mapping
 Denoising and Effective Contrast Enhancement for Dynamic Range Mapping G. Kiruthiga Department of Electronics and Communication Adithya Institute of Technology Coimbatore B. Hakkem Department of Electronics
Denoising and Effective Contrast Enhancement for Dynamic Range Mapping G. Kiruthiga Department of Electronics and Communication Adithya Institute of Technology Coimbatore B. Hakkem Department of Electronics
COMPUTATIONAL PHOTOGRAPHY. Chapter 10
 1 COMPUTATIONAL PHOTOGRAPHY Chapter 10 Computa;onal photography Computa;onal photography: image analysis and processing algorithms are applied to one or more photographs to create images that go beyond
1 COMPUTATIONAL PHOTOGRAPHY Chapter 10 Computa;onal photography Computa;onal photography: image analysis and processing algorithms are applied to one or more photographs to create images that go beyond
The ultimate camera. Computational Photography. Creating the ultimate camera. The ultimate camera. What does it do?
 Computational Photography The ultimate camera What does it do? Image from Durand & Freeman s MIT Course on Computational Photography Today s reading Szeliski Chapter 9 The ultimate camera Infinite resolution
Computational Photography The ultimate camera What does it do? Image from Durand & Freeman s MIT Course on Computational Photography Today s reading Szeliski Chapter 9 The ultimate camera Infinite resolution
Fast Bilateral Filtering for the Display of High-Dynamic-Range Images
 Fast Bilateral Filtering for the Display of High-Dynamic-Range Images Frédo Durand & Julie Dorsey Laboratory for Computer Science Massachusetts Institute of Technology Contributions Contrast reduction
Fast Bilateral Filtering for the Display of High-Dynamic-Range Images Frédo Durand & Julie Dorsey Laboratory for Computer Science Massachusetts Institute of Technology Contributions Contrast reduction
Distributed Algorithms. Image and Video Processing
 Chapter 7 High Dynamic Range (HDR) Distributed Algorithms for Introduction to HDR (I) Source: wikipedia.org 2 1 Introduction to HDR (II) High dynamic range classifies a very high contrast ratio in images
Chapter 7 High Dynamic Range (HDR) Distributed Algorithms for Introduction to HDR (I) Source: wikipedia.org 2 1 Introduction to HDR (II) High dynamic range classifies a very high contrast ratio in images
Agenda. Fusion and Reconstruction. Image Fusion & Reconstruction. Image Fusion & Reconstruction. Dr. Yossi Rubner.
 Fusion and Reconstruction Dr. Yossi Rubner yossi@rubner.co.il Some slides stolen from: Jack Tumblin 1 Agenda We ve seen Panorama (from different FOV) Super-resolution (from low-res) HDR (from different
Fusion and Reconstruction Dr. Yossi Rubner yossi@rubner.co.il Some slides stolen from: Jack Tumblin 1 Agenda We ve seen Panorama (from different FOV) Super-resolution (from low-res) HDR (from different
Fast Bilateral Filtering for the Display of High-Dynamic-Range Images
 Contributions ing for the Display of High-Dynamic-Range Images for HDR images Local tone mapping Preserves details No halo Edge-preserving filter Frédo Durand & Julie Dorsey Laboratory for Computer Science
Contributions ing for the Display of High-Dynamic-Range Images for HDR images Local tone mapping Preserves details No halo Edge-preserving filter Frédo Durand & Julie Dorsey Laboratory for Computer Science
High-Dynamic-Range Imaging & Tone Mapping
 High-Dynamic-Range Imaging & Tone Mapping photo by Jeffrey Martin! Spatial color vision! JPEG! Today s Agenda The dynamic range challenge! Multiple exposures! Estimating the response curve! HDR merging:
High-Dynamic-Range Imaging & Tone Mapping photo by Jeffrey Martin! Spatial color vision! JPEG! Today s Agenda The dynamic range challenge! Multiple exposures! Estimating the response curve! HDR merging:
Fixing the Gaussian Blur : the Bilateral Filter
 Fixing the Gaussian Blur : the Bilateral Filter Lecturer: Jianbing Shen Email : shenjianbing@bit.edu.cnedu Office room : 841 http://cs.bit.edu.cn/shenjianbing cn/shenjianbing Note: contents copied from
Fixing the Gaussian Blur : the Bilateral Filter Lecturer: Jianbing Shen Email : shenjianbing@bit.edu.cnedu Office room : 841 http://cs.bit.edu.cn/shenjianbing cn/shenjianbing Note: contents copied from
Applications of Flash and No-Flash Image Pairs in Mobile Phone Photography
 Applications of Flash and No-Flash Image Pairs in Mobile Phone Photography Xi Luo Stanford University 450 Serra Mall, Stanford, CA 94305 xluo2@stanford.edu Abstract The project explores various application
Applications of Flash and No-Flash Image Pairs in Mobile Phone Photography Xi Luo Stanford University 450 Serra Mall, Stanford, CA 94305 xluo2@stanford.edu Abstract The project explores various application
Continuous Flash. October 1, Technical Report MSR-TR Microsoft Research Microsoft Corporation One Microsoft Way Redmond, WA 98052
 Continuous Flash Hugues Hoppe Kentaro Toyama October 1, 2003 Technical Report MSR-TR-2003-63 Microsoft Research Microsoft Corporation One Microsoft Way Redmond, WA 98052 Page 1 of 7 Abstract To take a
Continuous Flash Hugues Hoppe Kentaro Toyama October 1, 2003 Technical Report MSR-TR-2003-63 Microsoft Research Microsoft Corporation One Microsoft Way Redmond, WA 98052 Page 1 of 7 Abstract To take a
Tone mapping. Tone mapping The ultimate goal is a visual match. Eye is not a photometer! How should we map scene luminances (up to
 Tone mapping Tone mapping Digital Visual Effects Yung-Yu Chuang How should we map scene luminances up to 1:100000 000 to displa luminances onl around 1:100 to produce a satisfactor image? Real world radiance
Tone mapping Tone mapping Digital Visual Effects Yung-Yu Chuang How should we map scene luminances up to 1:100000 000 to displa luminances onl around 1:100 to produce a satisfactor image? Real world radiance
Limitations of the Medium, compensation or accentuation
 The Art and Science of Depiction Limitations of the Medium, compensation or accentuation Fredo Durand MIT- Lab for Computer Science Limitations of the medium The medium cannot usually produce the same
The Art and Science of Depiction Limitations of the Medium, compensation or accentuation Fredo Durand MIT- Lab for Computer Science Limitations of the medium The medium cannot usually produce the same
Limitations of the medium
 The Art and Science of Depiction Limitations of the Medium, compensation or accentuation Limitations of the medium The medium cannot usually produce the same stimulus Real scene (possibly imaginary) Stimulus
The Art and Science of Depiction Limitations of the Medium, compensation or accentuation Limitations of the medium The medium cannot usually produce the same stimulus Real scene (possibly imaginary) Stimulus
Color , , Computational Photography Fall 2018, Lecture 7
 Color http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 7 Course announcements Homework 2 is out. - Due September 28 th. - Requires camera and
Color http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 7 Course announcements Homework 2 is out. - Due September 28 th. - Requires camera and
Camera Image Processing Pipeline: Part II
 Lecture 14: Camera Image Processing Pipeline: Part II Visual Computing Systems Today Finish image processing pipeline Auto-focus / auto-exposure Camera processing elements Smart phone processing elements
Lecture 14: Camera Image Processing Pipeline: Part II Visual Computing Systems Today Finish image processing pipeline Auto-focus / auto-exposure Camera processing elements Smart phone processing elements
Admin Deblurring & Deconvolution Different types of blur
 Admin Assignment 3 due Deblurring & Deconvolution Lecture 10 Last lecture Move to Friday? Projects Come and see me Different types of blur Camera shake User moving hands Scene motion Objects in the scene
Admin Assignment 3 due Deblurring & Deconvolution Lecture 10 Last lecture Move to Friday? Projects Come and see me Different types of blur Camera shake User moving hands Scene motion Objects in the scene
Computational Photography
 Computational photography Computational Photography Digital Visual Effects Yung-Yu Chuang wikipedia: Computational photography h refers broadly to computational imaging techniques that enhance or extend
Computational photography Computational Photography Digital Visual Effects Yung-Yu Chuang wikipedia: Computational photography h refers broadly to computational imaging techniques that enhance or extend
Computational Illumination Frédo Durand MIT - EECS
 Computational Illumination Frédo Durand MIT - EECS Some Slides from Ramesh Raskar (MIT Medialab) High level idea Control the illumination to Lighting as a post-process Extract more information Flash/no-flash
Computational Illumination Frédo Durand MIT - EECS Some Slides from Ramesh Raskar (MIT Medialab) High level idea Control the illumination to Lighting as a post-process Extract more information Flash/no-flash
Camera Image Processing Pipeline: Part II
 Lecture 13: Camera Image Processing Pipeline: Part II Visual Computing Systems Today Finish image processing pipeline Auto-focus / auto-exposure Camera processing elements Smart phone processing elements
Lecture 13: Camera Image Processing Pipeline: Part II Visual Computing Systems Today Finish image processing pipeline Auto-focus / auto-exposure Camera processing elements Smart phone processing elements
Digital Radiography using High Dynamic Range Technique
 Digital Radiography using High Dynamic Range Technique DAN CIURESCU 1, SORIN BARABAS 2, LIVIA SANGEORZAN 3, LIGIA NEICA 1 1 Department of Medicine, 2 Department of Materials Science, 3 Department of Computer
Digital Radiography using High Dynamic Range Technique DAN CIURESCU 1, SORIN BARABAS 2, LIVIA SANGEORZAN 3, LIGIA NEICA 1 1 Department of Medicine, 2 Department of Materials Science, 3 Department of Computer
Flash Photography Enhancement via Intrinsic Relighting
 Flash Photography Enhancement via Intrinsic Relighting Elmar Eisemann MIT/Artis-INRIA Frédo Durand MIT Introduction Satisfactory photos in dark environments are challenging! Introduction Available light:
Flash Photography Enhancement via Intrinsic Relighting Elmar Eisemann MIT/Artis-INRIA Frédo Durand MIT Introduction Satisfactory photos in dark environments are challenging! Introduction Available light:
HDR images acquisition
 HDR images acquisition dr. Francesco Banterle francesco.banterle@isti.cnr.it Current sensors No sensors available to consumer for capturing HDR content in a single shot Some native HDR sensors exist, HDRc
HDR images acquisition dr. Francesco Banterle francesco.banterle@isti.cnr.it Current sensors No sensors available to consumer for capturing HDR content in a single shot Some native HDR sensors exist, HDRc
Multispectral Image Dense Matching
 Multispectral Image Dense Matching Xiaoyong Shen Li Xu Qi Zhang Jiaya Jia The Chinese University of Hong Kong Image & Visual Computing Lab, Lenovo R&T 1 Multispectral Dense Matching Dataset We build a
Multispectral Image Dense Matching Xiaoyong Shen Li Xu Qi Zhang Jiaya Jia The Chinese University of Hong Kong Image & Visual Computing Lab, Lenovo R&T 1 Multispectral Dense Matching Dataset We build a
VU Rendering SS Unit 8: Tone Reproduction
 VU Rendering SS 2012 Unit 8: Tone Reproduction Overview 1. The Problem Image Synthesis Pipeline Different Image Types Human visual system Tone mapping Chromatic Adaptation 2. Tone Reproduction Linear methods
VU Rendering SS 2012 Unit 8: Tone Reproduction Overview 1. The Problem Image Synthesis Pipeline Different Image Types Human visual system Tone mapping Chromatic Adaptation 2. Tone Reproduction Linear methods
High dynamic range and tone mapping Advanced Graphics
 High dynamic range and tone mapping Advanced Graphics Rafał Mantiuk Computer Laboratory, University of Cambridge Cornell Box: need for tone-mapping in graphics Rendering Photograph 2 Real-world scenes
High dynamic range and tone mapping Advanced Graphics Rafał Mantiuk Computer Laboratory, University of Cambridge Cornell Box: need for tone-mapping in graphics Rendering Photograph 2 Real-world scenes
Panoramas and High-Dynamic-Range Imaging
 Panoramas and High-Dynamic-Range Imaging Kari Pulli Senior Director Are you getting the whole picture? Compact Camera FOV = 50 x 35 Slide from Brown & Lowe Are you getting the whole picture? Compact Camera
Panoramas and High-Dynamic-Range Imaging Kari Pulli Senior Director Are you getting the whole picture? Compact Camera FOV = 50 x 35 Slide from Brown & Lowe Are you getting the whole picture? Compact Camera
Dynamic Range. H. David Stein
 Dynamic Range H. David Stein Dynamic Range What is dynamic range? What is low or limited dynamic range (LDR)? What is high dynamic range (HDR)? What s the difference? Since we normally work in LDR Why
Dynamic Range H. David Stein Dynamic Range What is dynamic range? What is low or limited dynamic range (LDR)? What is high dynamic range (HDR)? What s the difference? Since we normally work in LDR Why
How to capture the best HDR shots.
 What is HDR? How to capture the best HDR shots. Processing HDR. Noise reduction. Conversion to monochrome. Enhancing room textures through local area sharpening. Standard shot What is HDR? HDR shot What
What is HDR? How to capture the best HDR shots. Processing HDR. Noise reduction. Conversion to monochrome. Enhancing room textures through local area sharpening. Standard shot What is HDR? HDR shot What
Computational Photography and Video. Prof. Marc Pollefeys
 Computational Photography and Video Prof. Marc Pollefeys Today s schedule Introduction of Computational Photography Course facts Syllabus Digital Photography What is computational photography Convergence
Computational Photography and Video Prof. Marc Pollefeys Today s schedule Introduction of Computational Photography Course facts Syllabus Digital Photography What is computational photography Convergence
Correcting Over-Exposure in Photographs
 Correcting Over-Exposure in Photographs Dong Guo, Yuan Cheng, Shaojie Zhuo and Terence Sim School of Computing, National University of Singapore, 117417 {guodong,cyuan,zhuoshao,tsim}@comp.nus.edu.sg Abstract
Correcting Over-Exposure in Photographs Dong Guo, Yuan Cheng, Shaojie Zhuo and Terence Sim School of Computing, National University of Singapore, 117417 {guodong,cyuan,zhuoshao,tsim}@comp.nus.edu.sg Abstract
CS/ECE 545 (Digital Image Processing) Midterm Review
 Midterm Review") CS/ECE 545 (Digital Image Processing) Midterm Review Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) Exam Overview Wednesday, March 5, 2014 in class Will cover up to lecture
CS/ECE 545 (Digital Image Processing) Midterm Review Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) Exam Overview Wednesday, March 5, 2014 in class Will cover up to lecture
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 22: Computational photography photomatix.com Announcements Final project midterm reports due on Tuesday to CMS by 11:59pm BRDF s can be incredibly complicated
CS6670: Computer Vision Noah Snavely Lecture 22: Computational photography photomatix.com Announcements Final project midterm reports due on Tuesday to CMS by 11:59pm BRDF s can be incredibly complicated
Images and Displays. Lecture Steve Marschner 1
 Images and Displays Lecture 2 2008 Steve Marschner 1 Introduction Computer graphics: The study of creating, manipulating, and using visual images in the computer. What is an image? A photographic print?
Images and Displays Lecture 2 2008 Steve Marschner 1 Introduction Computer graphics: The study of creating, manipulating, and using visual images in the computer. What is an image? A photographic print?
Color , , Computational Photography Fall 2017, Lecture 11
 Color http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 11 Course announcements Homework 2 grades have been posted on Canvas. - Mean: 81.6% (HW1:
Color http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 11 Course announcements Homework 2 grades have been posted on Canvas. - Mean: 81.6% (HW1:
Deblurring. Basics, Problem definition and variants
 Deblurring Basics, Problem definition and variants Kinds of blur Hand-shake Defocus Credit: Kenneth Josephson Motion Credit: Kenneth Josephson Kinds of blur Spatially invariant vs. Spatially varying
Deblurring Basics, Problem definition and variants Kinds of blur Hand-shake Defocus Credit: Kenneth Josephson Motion Credit: Kenneth Josephson Kinds of blur Spatially invariant vs. Spatially varying
25/02/2017. C = L max L min. L max C 10. = log 10. = log 2 C 2. Cornell Box: need for tone-mapping in graphics. Dynamic range
 Cornell Box: need for tone-mapping in graphics High dynamic range and tone mapping Advanced Graphics Rafał Mantiuk Computer Laboratory, University of Cambridge Rendering Photograph 2 Real-world scenes
Cornell Box: need for tone-mapping in graphics High dynamic range and tone mapping Advanced Graphics Rafał Mantiuk Computer Laboratory, University of Cambridge Rendering Photograph 2 Real-world scenes
Acquisition Basics. How can we measure material properties? Goal of this Section. Special Purpose Tools. General Purpose Tools
 Course 10 Realistic Materials in Computer Graphics Acquisition Basics MPI Informatik (moving to the University of Washington Goal of this Section practical, hands-on description of acquisition basics general
Course 10 Realistic Materials in Computer Graphics Acquisition Basics MPI Informatik (moving to the University of Washington Goal of this Section practical, hands-on description of acquisition basics general
Image Processing by Bilateral Filtering Method
 ABHIYANTRIKI An International Journal of Engineering & Technology (A Peer Reviewed & Indexed Journal) Vol. 3, No. 4 (April, 2016) http://www.aijet.in/ eissn: 2394-627X Image Processing by Bilateral Image
ABHIYANTRIKI An International Journal of Engineering & Technology (A Peer Reviewed & Indexed Journal) Vol. 3, No. 4 (April, 2016) http://www.aijet.in/ eissn: 2394-627X Image Processing by Bilateral Image
Capturing Light in man and machine. Some figures from Steve Seitz, Steve Palmer, Paul Debevec, and Gonzalez et al.
 Capturing Light in man and machine Some figures from Steve Seitz, Steve Palmer, Paul Debevec, and Gonzalez et al. 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Image Formation Digital
Capturing Light in man and machine Some figures from Steve Seitz, Steve Palmer, Paul Debevec, and Gonzalez et al. 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Image Formation Digital
Automatic Content-aware Non-Photorealistic Rendering of Images
 Automatic Content-aware Non-Photorealistic Rendering of Images Akshay Gadi Patil Electrical Engineering Indian Institute of Technology Gandhinagar, India-382355 Email: akshay.patil@iitgn.ac.in Shanmuganathan
Automatic Content-aware Non-Photorealistic Rendering of Images Akshay Gadi Patil Electrical Engineering Indian Institute of Technology Gandhinagar, India-382355 Email: akshay.patil@iitgn.ac.in Shanmuganathan
Recovering High Dynamic Range Radiance Maps from Photographs
 Recovering High Dynamic Range Radiance Maps from Photographs Paul E. Debevec Jitendra Malik University of California at Berkeley 1 ABSTRACT We present a method of recovering high dynamic range radiance
Recovering High Dynamic Range Radiance Maps from Photographs Paul E. Debevec Jitendra Malik University of California at Berkeley 1 ABSTRACT We present a method of recovering high dynamic range radiance
Low Dynamic Range Solutions to the High Dynamic Range Imaging Problem
 Low Dynamic Range Solutions to the High Dynamic Range Imaging Problem Submitted in partial fulfillment of the requirements of the degree of Doctor of Philosophy by Shanmuganathan Raman (Roll No. 06407008)
Low Dynamic Range Solutions to the High Dynamic Range Imaging Problem Submitted in partial fulfillment of the requirements of the degree of Doctor of Philosophy by Shanmuganathan Raman (Roll No. 06407008)
HIGH DYNAMIC RANGE IMAGING Nancy Clements Beasley, March 22, 2011
 HIGH DYNAMIC RANGE IMAGING Nancy Clements Beasley, March 22, 2011 First - What Is Dynamic Range? Dynamic range is essentially about Luminance the range of brightness levels in a scene o From the darkest
HIGH DYNAMIC RANGE IMAGING Nancy Clements Beasley, March 22, 2011 First - What Is Dynamic Range? Dynamic range is essentially about Luminance the range of brightness levels in a scene o From the darkest
A Real Time Algorithm for Exposure Fusion of Digital Images
 A Real Time Algorithm for Exposure Fusion of Digital Images Tomislav Kartalov #1, Aleksandar Petrov *2, Zoran Ivanovski #3, Ljupcho Panovski #4 # Faculty of Electrical Engineering Skopje, Karpoš II bb,
A Real Time Algorithm for Exposure Fusion of Digital Images Tomislav Kartalov #1, Aleksandar Petrov *2, Zoran Ivanovski #3, Ljupcho Panovski #4 # Faculty of Electrical Engineering Skopje, Karpoš II bb,
Tone Adjustment of Underexposed Images Using Dynamic Range Remapping
 Tone Adjustment of Underexposed Images Using Dynamic Range Remapping Yanwen Guo and Xiaodong Xu National Key Lab for Novel Software Technology, Nanjing University Nanjing 210093, P. R. China {ywguo,xdxu}@nju.edu.cn
Tone Adjustment of Underexposed Images Using Dynamic Range Remapping Yanwen Guo and Xiaodong Xu National Key Lab for Novel Software Technology, Nanjing University Nanjing 210093, P. R. China {ywguo,xdxu}@nju.edu.cn
Lenses, exposure, and (de)focus
focus") Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
Image Enhancement for Astronomical Scenes. Jacob Lucas The Boeing Company Brandoch Calef The Boeing Company Keith Knox Air Force Research Laboratory
 Image Enhancement for Astronomical Scenes Jacob Lucas The Boeing Company Brandoch Calef The Boeing Company Keith Knox Air Force Research Laboratory ABSTRACT Telescope images of astronomical objects and
Image Enhancement for Astronomical Scenes Jacob Lucas The Boeing Company Brandoch Calef The Boeing Company Keith Knox Air Force Research Laboratory ABSTRACT Telescope images of astronomical objects and
HDR Images (High Dynamic Range)
") HDR Images (High Dynamic Range) 1995-2016 Josef Pelikán & Alexander Wilkie CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ 1 / 16 Dynamic Range of Images bright part (short exposure)
HDR Images (High Dynamic Range) 1995-2016 Josef Pelikán & Alexander Wilkie CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ 1 / 16 Dynamic Range of Images bright part (short exposure)
PHOTOGRAPHY: MINI-SYMPOSIUM
 PHOTOGRAPHY: MINI-SYMPOSIUM In Adobe Lightroom Loren Nelson www.naturalphotographyjackson.com Welcome and introductions Overview of general problems in photography Avoiding image blahs Focus / sharpness
PHOTOGRAPHY: MINI-SYMPOSIUM In Adobe Lightroom Loren Nelson www.naturalphotographyjackson.com Welcome and introductions Overview of general problems in photography Avoiding image blahs Focus / sharpness
Goal of this Section. Capturing Reflectance From Theory to Practice. Acquisition Basics. How can we measure material properties? Special Purpose Tools
 Capturing Reflectance From Theory to Practice Acquisition Basics GRIS, TU Darmstadt (formerly University of Washington, Seattle Goal of this Section practical, hands-on description of acquisition basics
Capturing Reflectance From Theory to Practice Acquisition Basics GRIS, TU Darmstadt (formerly University of Washington, Seattle Goal of this Section practical, hands-on description of acquisition basics
Frequencies and Color
 Frequencies and Color Alexei Efros, CS280, Spring 2018 Salvador Dali Gala Contemplating the Mediterranean Sea, which at 30 meters becomes the portrait of Abraham Lincoln, 1976 Spatial Frequencies and
Frequencies and Color Alexei Efros, CS280, Spring 2018 Salvador Dali Gala Contemplating the Mediterranean Sea, which at 30 meters becomes the portrait of Abraham Lincoln, 1976 Spatial Frequencies and
CSC320H: Intro to Visual Computing. Course WWW (course information sheet available there):
:") CSC320H: Intro to Visual Computing Instructor: Fernando Flores-Mangas Office: PT265C Email: mangas320@cs.toronto.edu Office Hours: W 11-noon or by appt. Course WWW (course information sheet available there):
CSC320H: Intro to Visual Computing Instructor: Fernando Flores-Mangas Office: PT265C Email: mangas320@cs.toronto.edu Office Hours: W 11-noon or by appt. Course WWW (course information sheet available there):
HIGH DYNAMIC RANGE MAP ESTIMATION VIA FULLY CONNECTED RANDOM FIELDS WITH STOCHASTIC CLIQUES
 HIGH DYNAMIC RANGE MAP ESTIMATION VIA FULLY CONNECTED RANDOM FIELDS WITH STOCHASTIC CLIQUES F. Y. Li, M. J. Shafiee, A. Chung, B. Chwyl, F. Kazemzadeh, A. Wong, and J. Zelek Vision & Image Processing Lab,
HIGH DYNAMIC RANGE MAP ESTIMATION VIA FULLY CONNECTED RANDOM FIELDS WITH STOCHASTIC CLIQUES F. Y. Li, M. J. Shafiee, A. Chung, B. Chwyl, F. Kazemzadeh, A. Wong, and J. Zelek Vision & Image Processing Lab,
Image Denoising using Dark Frames
 Image Denoising using Dark Frames Rahul Garg December 18, 2009 1 Introduction In digital images there are multiple sources of noise. Typically, the noise increases on increasing ths ISO but some noise
Image Denoising using Dark Frames Rahul Garg December 18, 2009 1 Introduction In digital images there are multiple sources of noise. Typically, the noise increases on increasing ths ISO but some noise
A Saturation-based Image Fusion Method for Static Scenes
 2015 6th International Conference of Information and Communication Technology for Embedded Systems (IC-ICTES) A Saturation-based Image Fusion Method for Static Scenes Geley Peljor and Toshiaki Kondo Sirindhorn
2015 6th International Conference of Information and Communication Technology for Embedded Systems (IC-ICTES) A Saturation-based Image Fusion Method for Static Scenes Geley Peljor and Toshiaki Kondo Sirindhorn
Prof. Feng Liu. Winter /10/2019
 Prof. Feng Liu Winter 29 http://www.cs.pdx.edu/~fliu/courses/cs4/ //29 Last Time Course overview Admin. Info Computer Vision Computer Vision at PSU Image representation Color 2 Today Filter 3 Today Filters
Prof. Feng Liu Winter 29 http://www.cs.pdx.edu/~fliu/courses/cs4/ //29 Last Time Course overview Admin. Info Computer Vision Computer Vision at PSU Image representation Color 2 Today Filter 3 Today Filters
Vision Review: Image Processing. Course web page:
 Vision Review: Image Processing Course web page: www.cis.udel.edu/~cer/arv September 7, Announcements Homework and paper presentation guidelines are up on web page Readings for next Tuesday: Chapters 6,.,
Vision Review: Image Processing Course web page: www.cis.udel.edu/~cer/arv September 7, Announcements Homework and paper presentation guidelines are up on web page Readings for next Tuesday: Chapters 6,.,
Contents: Bibliography:
 ( 2 ) Contents: Sizing an Image...4 RAW File Conversion...4 Selection Tools...5 Colour Range...5 Quick Mask...6 Extract Tool...7 Adding a Layer Style...7 Adjustment Layer...8 Adding a gradient to an Adjustment
( 2 ) Contents: Sizing an Image...4 RAW File Conversion...4 Selection Tools...5 Colour Range...5 Quick Mask...6 Extract Tool...7 Adding a Layer Style...7 Adjustment Layer...8 Adding a gradient to an Adjustment
Digital Image Processing
 Digital Image Processing Part 2: Image Enhancement Digital Image Processing Course Introduction in the Spatial Domain Lecture AASS Learning Systems Lab, Teknik Room T26 achim.lilienthal@tech.oru.se Course
Digital Image Processing Part 2: Image Enhancement Digital Image Processing Course Introduction in the Spatial Domain Lecture AASS Learning Systems Lab, Teknik Room T26 achim.lilienthal@tech.oru.se Course
Focusing and Metering
 Focusing and Metering CS 478 Winter 2012 Slides mostly stolen by David Jacobs from Marc Levoy Focusing Outline Manual Focus Specialty Focus Autofocus Active AF Passive AF AF Modes Manual Focus - View Camera
Focusing and Metering CS 478 Winter 2012 Slides mostly stolen by David Jacobs from Marc Levoy Focusing Outline Manual Focus Specialty Focus Autofocus Active AF Passive AF AF Modes Manual Focus - View Camera
SHAW ACADEMY NOTES. Ultimate Photography Program
 SHAW ACADEMY NOTES Ultimate Photography Program What is a Raw file? RAW is simply a file type, like a JPEG. But, where a JPEG photo is considered a photograph, a RAW is a digital negative, an image that
SHAW ACADEMY NOTES Ultimate Photography Program What is a Raw file? RAW is simply a file type, like a JPEG. But, where a JPEG photo is considered a photograph, a RAW is a digital negative, an image that
HIGH DYNAMIC RANGE IMAGE ACQUISITION USING FLASH IMAGE
 HIGH DYNAMIC RANGE IMAGE ACQUISITION USING FLASH IMAGE Ryo Matsuoka, Tatsuya Baba, Masahiro Okuda Univ. of Kitakyushu, Faculty of Environmental Engineering, JAPAN Keiichiro Shirai Shinshu University Faculty
HIGH DYNAMIC RANGE IMAGE ACQUISITION USING FLASH IMAGE Ryo Matsuoka, Tatsuya Baba, Masahiro Okuda Univ. of Kitakyushu, Faculty of Environmental Engineering, JAPAN Keiichiro Shirai Shinshu University Faculty
Local Adjustment Tools
 PHOTOGRAPHY: TRICKS OF THE TRADE Lightroom CC Local Adjustment Tools Loren Nelson www.naturalphotographyjackson.com Goals for Tricks of the Trade NOT show you the way you should work Demonstrate and discuss
PHOTOGRAPHY: TRICKS OF THE TRADE Lightroom CC Local Adjustment Tools Loren Nelson www.naturalphotographyjackson.com Goals for Tricks of the Trade NOT show you the way you should work Demonstrate and discuss
Color Computer Vision Spring 2018, Lecture 15
 Color http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 15 Course announcements Homework 4 has been posted. - Due Friday March 23 rd (one-week homework!) - Any questions about the
Color http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 15 Course announcements Homework 4 has been posted. - Due Friday March 23 rd (one-week homework!) - Any questions about the
CS 89.15/189.5, Fall 2015 ASPECTS OF DIGITAL PHOTOGRAPHY COMPUTATIONAL. Image Processing Basics. Wojciech Jarosz
 CS 89.15/189.5, Fall 2015 COMPUTATIONAL ASPECTS OF DIGITAL PHOTOGRAPHY Image Processing Basics Wojciech Jarosz wojciech.k.jarosz@dartmouth.edu Domain, range Domain vs. range 2D plane: domain of images
CS 89.15/189.5, Fall 2015 COMPUTATIONAL ASPECTS OF DIGITAL PHOTOGRAPHY Image Processing Basics Wojciech Jarosz wojciech.k.jarosz@dartmouth.edu Domain, range Domain vs. range 2D plane: domain of images
icam06, HDR, and Image Appearance
 icam06, HDR, and Image Appearance Jiangtao Kuang, Mark D. Fairchild, Rochester Institute of Technology, Rochester, New York Abstract A new image appearance model, designated as icam06, has been developed
icam06, HDR, and Image Appearance Jiangtao Kuang, Mark D. Fairchild, Rochester Institute of Technology, Rochester, New York Abstract A new image appearance model, designated as icam06, has been developed
High Dynamic Range Video with Ghost Removal
 High Dynamic Range Video with Ghost Removal Stephen Mangiat and Jerry Gibson University of California, Santa Barbara, CA, 93106 ABSTRACT We propose a new method for ghost-free high dynamic range (HDR)
High Dynamic Range Video with Ghost Removal Stephen Mangiat and Jerry Gibson University of California, Santa Barbara, CA, 93106 ABSTRACT We propose a new method for ghost-free high dynamic range (HDR)
Deconvolution , , Computational Photography Fall 2018, Lecture 12
 Deconvolution http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 12 Course announcements Homework 3 is out. - Due October 12 th. - Any questions?
Deconvolution http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 12 Course announcements Homework 3 is out. - Due October 12 th. - Any questions?
Photo Editing Workflow
 Photo Editing Workflow WHY EDITING Modern digital photography is a complex process, which starts with the Photographer s Eye, that is, their observational ability, it continues with photo session preparations,
Photo Editing Workflow WHY EDITING Modern digital photography is a complex process, which starts with the Photographer s Eye, that is, their observational ability, it continues with photo session preparations,
Defocus Map Estimation from a Single Image
 Defocus Map Estimation from a Single Image Shaojie Zhuo Terence Sim School of Computing, National University of Singapore, Computing 1, 13 Computing Drive, Singapore 117417, SINGAPOUR Abstract In this
Defocus Map Estimation from a Single Image Shaojie Zhuo Terence Sim School of Computing, National University of Singapore, Computing 1, 13 Computing Drive, Singapore 117417, SINGAPOUR Abstract In this
Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing
 Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing Ashok Veeraraghavan, Ramesh Raskar, Ankit Mohan & Jack Tumblin Amit Agrawal, Mitsubishi Electric Research
Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing Ashok Veeraraghavan, Ramesh Raskar, Ankit Mohan & Jack Tumblin Amit Agrawal, Mitsubishi Electric Research
Tonal quality and dynamic range in digital cameras
 Tonal quality and dynamic range in digital cameras Dr. Manal Eissa Assistant professor, Photography, Cinema and TV dept., Faculty of Applied Arts, Helwan University, Egypt Abstract: The diversity of display
Tonal quality and dynamic range in digital cameras Dr. Manal Eissa Assistant professor, Photography, Cinema and TV dept., Faculty of Applied Arts, Helwan University, Egypt Abstract: The diversity of display
Photomatix Light 1.0 User Manual
 Photomatix Light 1.0 User Manual Table of Contents Introduction... iii Section 1: HDR...1 1.1 Taking Photos for HDR...2 1.1.1 Setting Up Your Camera...2 1.1.2 Taking the Photos...3 Section 2: Using Photomatix
Photomatix Light 1.0 User Manual Table of Contents Introduction... iii Section 1: HDR...1 1.1 Taking Photos for HDR...2 1.1.1 Setting Up Your Camera...2 1.1.2 Taking the Photos...3 Section 2: Using Photomatix
Introduction to Image Processing and Computer Vision -- Noise, Dynamic Range and Color --
 Introduction to Image Processing and Computer Vision -- Noise, Dynamic Range and Color -- Winter 2013 Ivo Ihrke Organizational Issues I received your email addresses Course announcements will be send via
Introduction to Image Processing and Computer Vision -- Noise, Dynamic Range and Color -- Winter 2013 Ivo Ihrke Organizational Issues I received your email addresses Course announcements will be send via
Images and Displays. CS4620 Lecture 15
 Images and Displays CS4620 Lecture 15 2014 Steve Marschner 1 What is an image? A photographic print A photographic negative? This projection screen Some numbers in RAM? 2014 Steve Marschner 2 An image
Images and Displays CS4620 Lecture 15 2014 Steve Marschner 1 What is an image? A photographic print A photographic negative? This projection screen Some numbers in RAM? 2014 Steve Marschner 2 An image
Digital photography , , Computational Photography Fall 2017, Lecture 2
 Digital photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 2 Course announcements To the 14 students who took the course survey on
Digital photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 2 Course announcements To the 14 students who took the course survey on
CSE 332/564: Visualization. Fundamentals of Color. Perception of Light Intensity. Computer Science Department Stony Brook University
 Perception of Light Intensity CSE 332/564: Visualization Fundamentals of Color Klaus Mueller Computer Science Department Stony Brook University How Many Intensity Levels Do We Need? Dynamic Intensity Range
Perception of Light Intensity CSE 332/564: Visualization Fundamentals of Color Klaus Mueller Computer Science Department Stony Brook University How Many Intensity Levels Do We Need? Dynamic Intensity Range
Prof. Feng Liu. Spring /12/2017
 Prof. Feng Liu Spring 2017 http://www.cs.pd.edu/~fliu/courses/cs510/ 04/12/2017 Last Time Filters and its applications Today De-noise Median filter Bilateral filter Non-local mean filter Video de-noising
Prof. Feng Liu Spring 2017 http://www.cs.pd.edu/~fliu/courses/cs510/ 04/12/2017 Last Time Filters and its applications Today De-noise Median filter Bilateral filter Non-local mean filter Video de-noising
Problem Set 3. Assigned: March 9, 2006 Due: March 23, (Optional) Multiple-Exposure HDR Images
 Multiple-Exposure HDR Images") 6.098/6.882 Computational Photography 1 Problem Set 3 Assigned: March 9, 2006 Due: March 23, 2006 Problem 1 (Optional) Multiple-Exposure HDR Images Even though this problem is optional, we recommend you
6.098/6.882 Computational Photography 1 Problem Set 3 Assigned: March 9, 2006 Due: March 23, 2006 Problem 1 (Optional) Multiple-Exposure HDR Images Even though this problem is optional, we recommend you
This histogram represents the +½ stop exposure from the bracket illustrated on the first page.
 Washtenaw Community College Digital M edia Arts Photo http://courses.wccnet.edu/~donw Don W erthm ann GM300BB 973-3586 donw@wccnet.edu Exposure Strategies for Digital Capture Regardless of the media choice
Washtenaw Community College Digital M edia Arts Photo http://courses.wccnet.edu/~donw Don W erthm ann GM300BB 973-3586 donw@wccnet.edu Exposure Strategies for Digital Capture Regardless of the media choice
Recent Advances in Image Deblurring. Seungyong Lee (Collaboration w/ Sunghyun Cho)
") Recent Advances in Image Deblurring Seungyong Lee (Collaboration w/ Sunghyun Cho) Disclaimer Many images and figures in this course note have been copied from the papers and presentation materials of previous
Recent Advances in Image Deblurring Seungyong Lee (Collaboration w/ Sunghyun Cho) Disclaimer Many images and figures in this course note have been copied from the papers and presentation materials of previous
SHOOTING FOR HIGH DYNAMIC RANGE IMAGES DAVID STUMP ASC
 SHOOTING FOR HIGH DYNAMIC RANGE IMAGES DAVID STUMP ASC CONCERNS FOR CINEMATOGRAPHERS WORKING IN HIGHER DYNAMIC RANGE FILM HAS HAD THE ABILITY TO CAPTURE HDR FOR DECADES FILM NEGATIVE CAN CAPTURE SCENE
SHOOTING FOR HIGH DYNAMIC RANGE IMAGES DAVID STUMP ASC CONCERNS FOR CINEMATOGRAPHERS WORKING IN HIGHER DYNAMIC RANGE FILM HAS HAD THE ABILITY TO CAPTURE HDR FOR DECADES FILM NEGATIVE CAN CAPTURE SCENE
High Dynamic Range (HDR) photography is a combination of a specialized image capture technique and image processing.
 photography is a combination of a specialized image capture technique and image processing.") Introduction High Dynamic Range (HDR) photography is a combination of a specialized image capture technique and image processing. Photomatix Pro's HDR imaging processes combine several Low Dynamic Range
Introduction High Dynamic Range (HDR) photography is a combination of a specialized image capture technique and image processing. Photomatix Pro's HDR imaging processes combine several Low Dynamic Range
Fast and High-Quality Image Blending on Mobile Phones
 Fast and High-Quality Image Blending on Mobile Phones Yingen Xiong and Kari Pulli Nokia Research Center 955 Page Mill Road Palo Alto, CA 94304 USA Email: {yingenxiong, karipulli}@nokiacom Abstract We present
Fast and High-Quality Image Blending on Mobile Phones Yingen Xiong and Kari Pulli Nokia Research Center 955 Page Mill Road Palo Alto, CA 94304 USA Email: {yingenxiong, karipulli}@nokiacom Abstract We present
CS354 Computer Graphics Computational Photography. Qixing Huang April 23 th 2018
 CS354 Computer Graphics Computational Photography Qixing Huang April 23 th 2018 Background Sales of digital cameras surpassed sales of film cameras in 2004 Digital Cameras Free film Instant display Quality
CS354 Computer Graphics Computational Photography Qixing Huang April 23 th 2018 Background Sales of digital cameras surpassed sales of film cameras in 2004 Digital Cameras Free film Instant display Quality
Contrast Image Correction Method
 Contrast Image Correction Method Journal of Electronic Imaging, Vol. 19, No. 2, 2010 Raimondo Schettini, Francesca Gasparini, Silvia Corchs, Fabrizio Marini, Alessandro Capra, and Alfio Castorina Presented
Contrast Image Correction Method Journal of Electronic Imaging, Vol. 19, No. 2, 2010 Raimondo Schettini, Francesca Gasparini, Silvia Corchs, Fabrizio Marini, Alessandro Capra, and Alfio Castorina Presented