Bounded Iterative Thresholding for Lumen Region Detection in Endoscopic Images
|
|
|
- Bernice Higgins
- 5 years ago
- Views:
Transcription
1 Bounded Ieraive Thresholding for Lumen Region Deecion in Endoscopic Images Pon Nidhya Elango School of Compuer Science and Engineering Nanyang Technological Universiy Nanyang Avenue, Singapore Siew-Kei Lam School of Compuer Science and Engineering Nanyang Technological Universiy Nanyang Avenue, Singapore Absrac The developmen of a fully auomaed roboic endoscopic seering sysem has been an acive area of research for more han a decade. This paper aims a proposing a hardware-efficien ieraive hresholding sraegy o locae he lumen region in capured endoscopic images in order o enhance radiional endoscopes wih cerain degree of auonomy and inelligence. The proposed mehod is characerized by a definie requiremen on he number of ieraions of hresholding in order o deec he lumen region. The proposed algorihm has been demonsraed o be robus agains varying characerisics using real endoscopic sample images. The reducion in he number of operaions required by he proposed mehod can be up o 71% compared o a previously repored mehod. FPGA synhesis resuls of he proposed approach confirm is viabiliy for realime realizaion. Keywords-compuer vision; FPGA; hardware acceleraion; medical images I. INTRODUCTION Medical endoscopy is a minimally invasive procedure o invesigae various inernal caviies in he human body (e.g. lower gasroinesinal rac and respiraory rac for diagnosis and herapy. Micro-roboic endoscopes wih suppor for compuer-aided auomaed navigaion have emerged o alleviae he pain and discomfor risks in endoscopy. As illuminaion in endoscopes is provided by a poin ligh source, he region characerizing he farhes piece of issue appears o be he darkes in he capured endoscopic image and is referred o as he lumen region. The idenificaion of he lumen region and navigaion of he endoscope owards he lumen cener is he principal echnique used for auomaed roboic endoscopic seering sysem. Since he adven of endoscopes wih digial imaging chips, several endoscopic image processing echniques have been proposed for he idenificaion of he lumen conour and lumen cener in order o provide decision suppor for diagnosis and o provide suppor for navigaion. Exracion of he precise lumen conour is essenial when i comes o diagnosis. The conour, however, migh no be conspicuous in every image and i is an opional requiremen for navigaion [1]. Moreover, exracion of he precise conour could be oo slow for meeing real ime requiremens. Thus, for he purpose of auomaing endoscope navigaion, he robus idenificaion of he cener of he lumen is sufficien o precisely conrol he endoscope orienaion []-[6]. Several hardware-based image processing algorihms on segmenaion and region growing have been proposed as sofware approaches opimized for microprocessors may no be fas enough for real ime processing. FPGAs come across as a viable choice for he implemenaion of real ime image processing algorihms allowing for a dedicaed hardware soluion ha explois parallel and pipelined design echniques. The challenges in designing robus image processing algorihms sem from imaging condiions in he gasroinesinal rac ha end o be challenging as he background illuminaion and reflecive properies may no be uniform hroughou. Also, he shape, size and pixel inensiies of he lumen region in capured images migh vary significanly. This paper aims a proposing a hardware-efficien ieraive hresholding sraegy o locae he lumen region in capured endoscopic images. The deecion of he lumen region serves as a pre-requisie sep for he idenificaion of he lumen cener. The proposed bounded ieraive hresholding algorihm is characerized by a definie requiremen on he number of ieraions of hresholding in order o deec he lumen region. Simulaions were carried ou in Malab, for a class of 40 graylevel endoscopic images of size 56x56, o demonsrae he robusness of he proposed mehod for lumen region deecion. When compared o a previously repored approach, he proposed mehod leads o significan reducion in compuaional complexiy. In addiion, FPGA synhesis resuls show ha he proposed approach lends iself well for real-ime realizaion. In he nex secion, we review exising works in he lieraure for he exracion of lumen region. In Secion 3, we highligh limiaions of an exising work for deecing he lumen region, and Secion 4 describes he proposed bounded ieraive hresholding algorihm for lumen region deecion. This is followed by a discussion on experimenal and FPGA synhesis resuls in Secion 5. Secion 6 concludes he paper. II. RELATED WORK The work in [7] presened a echnique for auomaic exracion of lumen region and is boundary by using a combinaion of a progressive hresholding echnique and region growing. A quasi Region of Ineres (RoI is obained afer wo ieraions of Osu s hresholding [8]. In order o faciliae auomaic segmenaion, an adapive progressive hresholding (APT approach was suggesed in [9]. A Cumulaive Limiing
2 Facor (CLF is used o idenify he opimal hreshold in every ieraion. The APT mehod was combined wih a Differenial Region Growing (DRG approach in [10] for he exracion of he lumen region based on he similariy of pixels. An efficien pipelined archiecure for he implemenaion of APT on FPGA has been proposed in [9]. The archiecure was furher improved by replacing he complex muliplicaion and division operaions involved in Osu analysis wih an efficien logarihm conversion uni [11]. However, he APT mehod resuls in more han 100 sequenial ieraions for cerain endoscopic images which may no be appropriae for real ime implemenaion. Wang e. al [5] suggesed a echnique for lumen cener deecion which involves adapive hresholding followed by erosion and dilaion. Facors ha represen he upper and lower limis of he raio of dark region o he area of he whole endoscopic image need o be predeermined by experimening wih a good se of images. The adapive hreshold value needs o be deermined based on he comparison of he whole area of he image agains hese predeermined facors. Tian e. al. [1][13] suggesed he use of an Iris filer in order o obain a very accurae boundary of he lumen in endoscopic images. A preliminary RoI is exraced hrough APT and he remaining areas of he image which are beyond he hreshold value are eliminaed and considered as background. Having such a uniform background is a precondiion o be me for he use of Iris filer. The lumen boundary obained on applying he Iris filer involved large number of rigonomeric compuaions in he convergence index calculaions. Though efficien CORDIC archiecures have been suggesed in [13] for he hardware implemenaion of he rigonomeric compuaions, such a complex echnique o obain he accurae lumen boundary is no essenial for he case of endoscopic navigaion. A disinc algorihm using fuzzy region growing was suggesed by Chang e. al. o segmen he lumen region from endoscopic images [14]. The fuzzy rule mehod has been implemened on FPGA wih a pipelined archiecure. The fuzzy region growing is preceded by hresholding he image wih an opimal hreshold obained a he end of an ieraion of Osu s echnique. In spie of being a feasible implemenaion, his mehod is limied in accuracy as only a single ieraion of Osu is employed. Lim e. al. [4] proposed a echnique for locaing he cener of mass (CoM of he lumen in endoscopic images using a novel APT approach o idenify he lumen region ha is followed by a windowing operaion o deermine he lumen cener. The APT is erminaed when he maximum Beween Class Variance (BCV idenified by he Osu mehod in an ieraion is less han he maximum BCV of he previous ieraion. III. LIMITATION OF EXISTING APT METHOD The Osu s echnique segmens he hisogram of he endoscopic image ino wo disinc classes. Le C 1 and C represen he wo classes o be obained afer a segmenaion by hreshold, wih P 1 and P referring o he probabiliy funcion of a pixel belonging o class C 1 and C respecively. The probabiliy funcions are calculaed as shown below. P1 = ω ni = N i == 0 P = ω 0 = 1 ω (1 ( Le n i be he number of pixels which have an inensiy value of i and N he oal number of pixels in he image, and L he number of gray levels. L 1 i = n μ i T (3 i = 0 N i = n μ i i = 0 N (4 The Osu mehod suggess ha he opimal hreshold can be obained hrough he sequenial search for he maximum of beween class variance (BCV σ B(, for he values of where 0 < L : μt μ σ B ( = w0 (1 w0 ( 1 w0 max( σ B 0 = 0 max( σ > σ B B i 1 max( σ B i max( σ B μ w0 Fig. 1: APT mehod in [4] The APT mehod proposed in [4] involves discriminan analysis by Osu mehod and inensiy normalizaion for every ieraion unil a erminaion condiion is me (see Fig. 1. In paricular, he APT is erminaed when he maximum BCV idenified by he Osu mehod in he curren ieraion is less han he maximum BCV of he previous ieraion. Our experimens reveal ha for cerain images, he APT algorihm (5
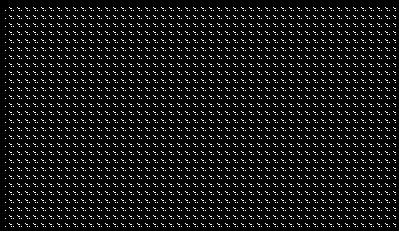
![proposed in [4] does no erminae a he righ poin.](/docs-images/90/102407516/images/3-0.jpg "While for some images he final hresholded image obained afer erminaion of he algorihm does no have a well segmened lumen region, for cerain oher images he final hresholded image has all he pixels")
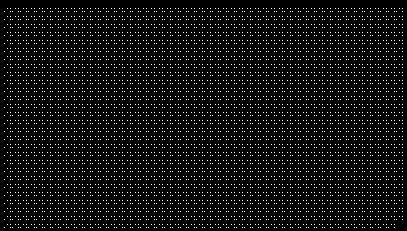
![merged ino he background. In order o validae he effeciveness of he APT mehod, we perform he windowing operaion in [4] on he final segmened lumen region o locae he lumen cener.](/docs-images/90/102407516/images/3-1.jpg "For he endoscopic image shown in Fig. (a, he APT mehod in [4] erminaes afer ieraions. However, i can be observed from he final hresholded image in Fig. (b ha significan background remains in he image.")





3 proposed in [4] does no erminae a he righ poin. While for some images he final hresholded image obained afer erminaion of he algorihm does no have a well segmened lumen region, for cerain oher images he final hresholded image has all he pixels merged ino he background. In order o validae he effeciveness of he APT mehod, we perform he windowing operaion in [4] on he final segmened lumen region o locae he lumen cener. For he endoscopic image shown in Fig. (a, he APT mehod in [4] erminaes afer ieraions. However, i can be observed from he final hresholded image in Fig. (b ha significan background remains in he image. Deermining he lumen cener on his segmened image gives incorrec resuls as here is significan influence from he background ha is lef behind and he problem is furher complicaed as he lumen region is small. I can be observed ha he final lumen cener idenified, highlighed in red in Fig. (c, is well ouside he lumen region. On he oher hand, for he endoscopic image shown in Fig. 3(a, APT erminaes afer 6 ieraions, hough ieraions of Osu based hresholding would acually suffice for his case. Fig. 3(b shows he final hresholded image obained for he endoscopic image in Fig. 3(a afer 6 ieraions, wih all he pixels having been merged ino he background. Fig. 3(c shows he hresholded image afer ieraions, which would have been sufficien for accurae deecion of he lumen region. IV. PROPOSED METHOD The proposed APT approach sems from observaion ha a maximum of 3 ieraions were sufficien in order o obain a hresholded image wih a well segmened lumen region. In addiion, he decision o perform he hird ieraion depends on he number of pixels beween he wo hisogram peaks obained in an ieraion of he Osu mehod. Fig. 4 illusraes he over-hresholding problem in [4]. The hisograms of he original image and he hresholded image afer he 1 s, nd and 3 rd ieraions of hresholding are shown in Fig. 4 for he endoscopic image in Fig. 4(a. The APT algorihm in [4] erminaes auomaically afer 3 ieraions and resuls in over-hresholding as shown in Fig. 4(f. I can be observed ha he hisogram of he hresholded image obained afer ieraions in Fig. 4(d, has discernible peaks, Peak1 and Peak. Peak1 refers o he maximum pixel coun for he inensiy in he low inensiy region which would consiue he lumen region, while Peak refers o he number of background pixels. The difference in pixel coun beween Peak1 and Peak afer ieraions of hresholding is highlighed in Fig. 4(d. Though he APT mehod in [4] erminaes only afer 3 ieraions, ieraions of hresholding would suffice o obain a final hresholded image wih a well segmened lumen, as i can be seen from Fig. 4(d ha is a large enough o discern beween he wo peaks. (a (b (c Fig. (a: Original endoscopic image; (b final hresholded image of (a; (c windowing operaion o deermine lumen cener (a (b (c (d (e (f (a (b (c Fig. 3(a: Original endoscopic image; (b over hresholded image of (a afer 6 ieraions; (c hresholded image afer ieraions Hence here is a need o refine he APT mehod in [4], as i resuls in under-hresholding (Fig. (b or over-hresholding (Fig. 3(b for some images. Moreover, auomaic erminaion according o he maximum condiion does no happen for all cases. Ou of 40 sample endoscopic images ha were esed, he APT mehod in [4] was unable o provide a well segmened image for 10 of hem. Fig. 4(a: Original endoscopic image; (b original hisogram; (c hisogram afer 1 s ieraion; (d hisogram afer nd ieraion; (e hisogram afer 3 rd ieraion, (f over-hresholded image afer 3 ieraions using he mehod in [4] Fig. 5 illusraes he under-hresholding problem wih he mehod in [4]. For he endoscopic image in Fig. 5(a, he APT mehod in [4] erminaes auomaically afer he nd ieraion. This resuls in an under-hresholded image as shown in Fig. 5(e. When compared o Fig. 4(d, i can be observed ha he hisogram afer he nd ieraion in Fig. 5(d has very low Peak1 and he gray level inensiies beween he Peak1 and Peak have a conribuion comparable o ha of Peak1. This makes i necessary o have a 3 rd round of hresholding in order o obain a final hresholded image wih a well segmened lumen.


![he mehod in [4] The analysis of he hisograms in Fig.](/docs-images/90/102407516/images/4-2.jpg "4 and Fig.")


















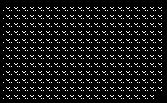
4 (a (b (c (d (e Fig. 5(a: Original endoscopic image; (b original hisogram; (c hisogram afer 1 s ieraion; (d hisogram afer nd ieraion; (e under-hresholded image afer ieraions using he mehod in [4] The analysis of he hisograms in Fig. 4 and Fig. 5 demonsraes ha in order o have he lumen as a predominan objec, he hresholding ieraions should coninue unil Peak1 is significanly higher han he conribuion from oher inermediae pixel inensiies (pixels beween Peak1 and Peak. In addiion, i was observed ha even in he case where Peak1 has over 000 pixels afer he nd ieraion, a 3 rd ieraion of hresholding was necessary for he images which had a comparable conribuion from inermediae inensiies beween Peak1 and Peak. Specifically, i was observed ha when 3 inermediae inensiies have a significan pixel coun of over 500 pixels, i is necessary o furher hreshold he image o ensure ha he final hresholded image has he lumen as he predominan objec. algorihm. I can be observed ha he Osu hresholding is performed wice for each image, and a hird ieraion is only underaken if Peak1 is less han 000 afer he second ieraion, or if Peak1 is more han 000 and Peak_500 is less han 3 afer he second ieraion. The values used for he comparisons of Peak1 and Peak_500 were obained from experimens based on he 56x56 endoscopic images. I is noeworhy ha he proposed echnique can also be exended o images of a differen resoluion using he following mehodology. The number of ieraions of hresholding, say n, can be deermined based on a reasonable number of raining images. The hisograms obained afer n ieraions of hresholding for all he raining images can be analyzed o obain a reliable esimae for he minimum value of Peak1. If Peak1 of he hisogram obained afer n ieraions happens o be less han he minimum value for cerain images, anoher final ieraion of hresholding is needed in order o beer disinguish he small lumen by reducing he conribuion of background pixels. Also, for he endoscopic images where Peak1 of he hisogram obained afer n ieraions of hresholding exceeds he minimum value, anoher final ieraion of hresholding is necessary only if he conribuion of background pixels is sill comparable o he value of Peak1. For insance, if here are a significan number of bins in he hisogram obained afer n ieraions of hresholding, whose pixel couns add up o a value comparable o Peak1, hen anoher final ieraion of hresholding can help o obain a hresholded image wih he lumen as he predominan objec. Hence he deerminaion of he value of n and Peak1 are he key seps in exending he proposed echnique for a new se of images wih differen resoluions. V. EXPERIMENTAL RESULTS In his secion, we compare he proposed bounded ieraive hresholding algorihm wih he baseline algorihm in [4], in erms of he qualiy of he deeced lumen regions, and compuaional complexiy. We will also discuss synhesis resuls o demonsrae he viabiliy of he proposed mehod for real-ime implemenaion. The experimens were performed on 40 gray-level endoscopic images of size 56x56 A. Effeciveness of lumen region deecion σ B max( σ B Fig. 7: Comparison of lumen ceners idenified by he proposed and baseline algorihms Fig. 6: Proposed bounded ieraive hresholding algorihm Le s denoe Peak_500 as he number of bins beween he peaks, whose pixel coun exceeds a value of 500. Fig. 6 illusraes he proposed bounded ieraive hresholding





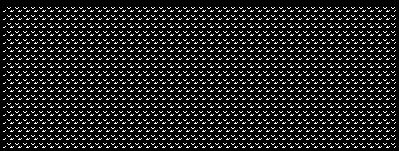
![Hisogram and Inensiy Area (IA Compuaion Deermine ni i [0,55] by 1. 65536 addiions scanning all pixels. i*n i i [0,55] 56 Muliplicaions II. Cumulaive Hisogram and Cumulaive IA Compuaion 3.](/docs-images/90/102407516/images/5-7.jpg "ni i= 0 [0,55] 55 Addiions 4. i * ni [0,55] 55 Addiions i= 0 III. Maximum BCV Compuaion 5. μ [0,55] 56 Divisions 6. ω [0,55] 56 Divisions Muliplicaions and 7.")
![σ B( [0,55] Division for every 51 Muliplicaions and 51 Divisions Fig.](/docs-images/90/102407516/images/5-10.jpg "9: Number of Osu ieraions required by he baseline and proposed mehod for 40 endoscopic images The number of Osu ieraions performed by he baseline algorihm ranges beween and 7 (zero ieraions for he")
5 Fig. 8: Endoscopic images (op and he hresholded images (boom using he proposed echnique, which enables accurae lumen ceners o be deeced In order o compare he qualiy of he deeced lumen regions beween he baseline algorihm and he proposed mehod, we perform he windowing operaion in [4] o locae he lumen ceners of he deeced lumen regions for boh echniques. Fig. 7 shows he absolue difference beween he lumen ceners idenified by he proposed mehod and he baseline mehod. I can be observed ha he resuls of boh he algorihms are in very close conformance excep for image 19. For his endoscopic image, he windowing algorihm is unable o idenify he lumen cener correcly for he baseline algorihm as he lumen region is small. However, he proposed mehod leads o he idenificaion of he correc lumen cener. Fig. 8 shows he lumen cener idenified by he proposed mehod for some of he endoscopic images used in he experimens. I can be observed ha he proposed echnique correcly idenifies he lumen cener for all he cases. I can be observed ha he compuaional complexiy for a single ieraion of hresholding for boh he baseline and proposed mehod is noably high, and hence reducing number of ieraions for lumen region deecion can significanly lower he compuaional complexiy. The number of Osu ieraions incurred by he proposed and baseline mehod for he sample endoscopic images are presened in Fig. 9. B. Compuaional Complexiy Analysis The seps and maximum number of operaions required for a single ieraion of Osu is shown in Table 1. TABLE 1 I. Hisogram and Inensiy Area (IA Compuaion Deermine ni i [0,55] by addiions scanning all pixels. i*n i i [0,55] 56 Muliplicaions II. Cumulaive Hisogram and Cumulaive IA Compuaion 3. ni i= 0 [0,55] 55 Addiions 4. i * ni [0,55] 55 Addiions i= 0 III. Maximum BCV Compuaion 5. μ [0,55] 56 Divisions 6. ω [0,55] 56 Divisions Muliplicaions and 7. σ B( [0,55] Division for every 51 Muliplicaions and 51 Divisions Fig. 9: Number of Osu ieraions required by he baseline and proposed mehod for 40 endoscopic images The number of Osu ieraions performed by he baseline algorihm ranges beween and 7 (zero ieraions for he baseline indicaes ha i is unable o erminae. On he conrary, he proposed algorihm performs o 3 ieraions of Osu based hresholding. The need for a 3 rd ieraion is deermined based on he inensiy hisogram of he image obained afer ieraions as explained in he previous secion. The proposed algorihm requires lesser or he same number of ieraions compared o he baseline algorihm for all he images considered excep for image 4, where he proposed mehod requires one ieraion more han he baseline. In addiion, here are wo cases (image 5 and 11, where he baseline algorihm is unable o erminae, bu he proposed algorihm is able converge in -3 ieraions. Hence he proposed algorihm leads o lower number of Osu ieraions, which in urn resuls in significan reducion in he compuaional complexiy. On average, he proposed algorihm requires 0% lesser number of muliplicaions and
6 divisions when compared o he baseline mehod. The reducion in he number of muliplicaions and divisions can be as much as 71% (for image 10. C. FPGA implemenaion resuls The main compuaional blocks of he proposed bounded ieraive hresholding echnique consis of 3 sages. The firs sage comprises of he module for compuing he inensiy hisogram. A dual por BRAM wih 56 locaions, each of widh 16-bi is used o sore he inensiy hisogram. VI. CONCLUSION In his paper, we proposed a bounded ieraive hresholding algorihm for deecing he lumen region of endoscopic images ha limis he number of Osu ieraions o 3. A 3 rd ieraion of hresholding is performed only if deemed necessary by analyzing he hisogram peak corresponding o he lumen region and he inermediae pixel couns beween he wo discerning peaks afer he second ieraion. Simulaions on an exensive se of 40 endoscopic images of size 56x56 show ha he proposed mehod is more robus and lead o significan reducion in he compuaional complexiy when compared o he baseline algorihm. The FPGA synhesis resuls of he proposed mehod furher jusifies is real-ime capabiliy. Fig. 10: Archiecure for compuing CH and CIA When all he pixels of he endoscopic image have been accouned for in he hisogram, a signal indicaing he end of his ask iniiaes he subsequen sage which involves he compuaion of he Cumulaive Hisogram (CH and Cumulaive Inensiy Area (CIA. Fig. 10 shows he archiecure for generaing he CH and CIA. Two arrays consising of 56 regisers each were used for obaining he CH and CIA. The conens of he Hisogram BRAM are read successively and accumulaed in a emporary regiser CIValue. In parallel, inensiy area daa are accumulaed in anoher emporary regiser CAValue (hird sage. Thus, as he conens of he Hisogram array are read, he updaed values of CIValue and CAValue are pushed ino he regiser arrays of CH and CIA respecively. The archiecure for compuing he maximum BCV is no shown. The proposed design was synhesized for he Xilinx Sparan 6 (XC6SLX45-CSG34 device and he synhesis resuls are shown in Table. From he simulaion resuls i can be esimaed ha i akes approximaely clock cycles o generae CH and CIA for a 56x56 endoscopic image in a single ieraion of he proposed mehod. Since he proposed mehod is bounded by a maximum number of 3 ieraions, i only requires a mos.3ms o deec he lumen region of a single endoscopic image. TABLE AREA MAXIMUM Number of Number of FREQUENCY SLICE LUTS SLICE regisers MHz REFERENCES [1] V. K. Asari, S. Kumar, I. M. Kassim, A Fully Auonomous Microroboic Endoscopy Sysem, Journal of Inelligen and Roboic Sysems, 8: , 000. [] M. Liedlgruber, A. Uhl, A Summary of Research Targeed a Compuer-Aided Decision Suppor in Endoscopy of he Gasroinesinal Trac, Technical Repor , Universia Salzburg, April 011. [3] M. Liedlgruber, A. Uhl, Endoscopic Image Processing - An Overview, Proceedings of he 6h Inernaional Symposium on Image and Signal Processing and Analysis, December 009, pp [4] C.S. Lim, H. Tian, G. Sadana, T. Srikanhan, High Speed Technique for Auomaic Guidance of Microroboics in Endoscopic procedures, Proc. of he 4h Annual IEEE EMBS Conference on Informaion Technology Applicaions in Biomedicine (ITAB, Birmingham, UK, April 003, pp [5] P. Wang, S. Krishnan, Y. Huang, N. Srinivasan, An Adapive Segmenaion Technique for Clinical Endoscopic Image Processing, Proceedings of he Second Join Conference and he Annual Fall Meeing of he Biomedical Engineering Sociey EMBS/BMES Conference, Vol., 00, pp [6] R. Reilink, S. Sramigioli, and S. Misra, Image based Flexible Endoscope Seering, IEEE/RSJ Inernaional Conference on Inelligen Robos and Sysems, Ocober 010, pp [7] S. Kumar, K. Asari, D. Radhakrishnan, Real-ime Auomaic Exracion of Lumen Region and Boundary from Endoscopic Images, Journal Med & Bio. Eng. & Compu., Vol.37, No.5, Sepember 1999, pp [8] N. Osu, A Threshold Selecion Mehod from Gray-Level Hisograms, IEEE Transacions on Sysems, Man and Cyberneics, vol. 9(1, 1979, pp [9] K. Asari, T. Srikanhan, S. Kumar, D. Radhakrishnan, A Pipelined Archiecure for Image Segmenaion by Adapive Progressive Thresholding, Microprocessors and Microsysems, 3(8-9, December 1999, pp [10] K. V. Asari, A Fas and Accurae Segmenaion Technique for he Exracion of Gasroinesinal Lumen from Endoscopic Images, Medical Engineering & Physics, Elsevier, 000, pp [11] H. Tian, S. K. Lam and T. Srikanhan, Area Time Efficien Beween- Class Variance Module for Adapive Segmenaion Process, IEE Proc.- Vis. Image Signal Process, Vol. 150, No. 4, Augus 003, pp [1] C. S. Lim, H. Tian, T. Srikanhan, An Auomaed Technique for High Speed Segmenaion of Endoscopic Images, Proceedings of 004 Inernaional Symposium on Inelligen Mulimedia, Video and Speech Processing, Hong Kong, Ocober 004 [13] C. S. Lim, S. K. Lam, H. Tian and T. Srikanhan, Efficien Archiecures for Segmenaion of Endoscopic Images in Micro-Roboic Auo Navigaion Sysems, Inernaional Journal of Humanoid Roboics, Vol. 3, No. 4, World Scienific, 006, pp [14] C. H. Chang, H. Tian, T. Srikanhan and C. S. Lim, Field Programmable Gae Array based Archiecure for Real Time Image Segmenaion by Region Growing Algorihm, Journal of Elecronic Imaging 11(4, SPIE, Ocober 00, pp
Foreign Fiber Image Segmentation Based on Maximum Entropy and Genetic Algorithm
 Journal of Compuer and Communicaions, 215, 3, 1-7 Published Online November 215 in SciRes. hp://www.scirp.org/journal/jcc hp://dx.doi.org/1.4236/jcc.215.3111 Foreign Fiber Image Segmenaion Based on Maximum
Journal of Compuer and Communicaions, 215, 3, 1-7 Published Online November 215 in SciRes. hp://www.scirp.org/journal/jcc hp://dx.doi.org/1.4236/jcc.215.3111 Foreign Fiber Image Segmenaion Based on Maximum
A Segmentation Method for Uneven Illumination Particle Images
 Research Journal of Applied Sciences, Engineering and Technology 5(4): 1284-1289, 2013 ISSN: 2040-7459; e-issn: 2040-7467 Maxwell Scienific Organizaion, 2013 Submied: July 17, 2012 Acceped: Augus 15, 2012
Research Journal of Applied Sciences, Engineering and Technology 5(4): 1284-1289, 2013 ISSN: 2040-7459; e-issn: 2040-7467 Maxwell Scienific Organizaion, 2013 Submied: July 17, 2012 Acceped: Augus 15, 2012
Comparing image compression predictors using fractal dimension
 Comparing image compression predicors using fracal dimension RADU DOBRESCU, MAEI DOBRESCU, SEFA MOCAU, SEBASIA ARALUGA Faculy of Conrol & Compuers POLIEHICA Universiy of Buchares Splaiul Independenei 313
Comparing image compression predicors using fracal dimension RADU DOBRESCU, MAEI DOBRESCU, SEFA MOCAU, SEBASIA ARALUGA Faculy of Conrol & Compuers POLIEHICA Universiy of Buchares Splaiul Independenei 313
Evaluation of the Digital images of Penaeid Prawns Species Using Canny Edge Detection and Otsu Thresholding Segmentation
 Inernaional Associaion of Scienific Innovaion and Research (IASIR) (An Associaion Unifying he Sciences, Engineering, and Applied Research) Inernaional Journal of Emerging Technologies in Compuaional and
Inernaional Associaion of Scienific Innovaion and Research (IASIR) (An Associaion Unifying he Sciences, Engineering, and Applied Research) Inernaional Journal of Emerging Technologies in Compuaional and
Mobile Robot Localization Using Fusion of Object Recognition and Range Information
 007 IEEE Inernaional Conference on Roboics and Auomaion Roma, Ialy, 10-14 April 007 FrB1.3 Mobile Robo Localizaion Using Fusion of Objec Recogniion and Range Informaion Byung-Doo Yim, Yong-Ju Lee, Jae-Bok
007 IEEE Inernaional Conference on Roboics and Auomaion Roma, Ialy, 10-14 April 007 FrB1.3 Mobile Robo Localizaion Using Fusion of Objec Recogniion and Range Informaion Byung-Doo Yim, Yong-Ju Lee, Jae-Bok
Comparitive Analysis of Image Segmentation Techniques
 ISSN: 78 33 Volume, Issue 9, Sepember 3 Compariive Analysis of Image Segmenaion echniques Rohi Sardana Pursuing Maser of echnology (Compuer Science and Engineering) GJU S& Hissar, Haryana Absrac Image
ISSN: 78 33 Volume, Issue 9, Sepember 3 Compariive Analysis of Image Segmenaion echniques Rohi Sardana Pursuing Maser of echnology (Compuer Science and Engineering) GJU S& Hissar, Haryana Absrac Image
Direct Analysis of Wave Digital Network of Microstrip Structure with Step Discontinuities
 Direc Analysis of Wave Digial Nework of Microsrip Srucure wih Sep Disconinuiies BILJANA P. SOŠIĆ Faculy of Elecronic Engineering Universiy of Niš Aleksandra Medvedeva 4, Niš SERBIA MIODRAG V. GMIROVIĆ
Direc Analysis of Wave Digial Nework of Microsrip Srucure wih Sep Disconinuiies BILJANA P. SOŠIĆ Faculy of Elecronic Engineering Universiy of Niš Aleksandra Medvedeva 4, Niš SERBIA MIODRAG V. GMIROVIĆ
Fuzzy Inference Model for Learning from Experiences and Its Application to Robot Navigation
 Fuzzy Inference Model for Learning from Experiences and Is Applicaion o Robo Navigaion Manabu Gouko, Yoshihiro Sugaya and Hiroomo Aso Deparmen of Elecrical and Communicaion Engineering, Graduae School
Fuzzy Inference Model for Learning from Experiences and Is Applicaion o Robo Navigaion Manabu Gouko, Yoshihiro Sugaya and Hiroomo Aso Deparmen of Elecrical and Communicaion Engineering, Graduae School
Pointwise Image Operations
 Poinwise Image Operaions Binary Image Analysis Jana Kosecka hp://cs.gmu.edu/~kosecka/cs482.hml - Lookup able mach image inensiy o he displayed brighness values Manipulaion of he lookup able differen Visual
Poinwise Image Operaions Binary Image Analysis Jana Kosecka hp://cs.gmu.edu/~kosecka/cs482.hml - Lookup able mach image inensiy o he displayed brighness values Manipulaion of he lookup able differen Visual
Knowledge Transfer in Semi-automatic Image Interpretation
 Knowledge Transfer in Semi-auomaic Image Inerpreaion Jun Zhou 1, Li Cheng 2, Terry Caelli 23, and Waler F. Bischof 1 1 Deparmen of Compuing Science, Universiy of Albera, Edmonon, Albera, Canada T6G 2E8
Knowledge Transfer in Semi-auomaic Image Inerpreaion Jun Zhou 1, Li Cheng 2, Terry Caelli 23, and Waler F. Bischof 1 1 Deparmen of Compuing Science, Universiy of Albera, Edmonon, Albera, Canada T6G 2E8
Memorandum on Impulse Winding Tester
 Memorandum on Impulse Winding Teser. Esimaion of Inducance by Impulse Response When he volage response is observed afer connecing an elecric charge sored up in he capaciy C o he coil L (including he inside
Memorandum on Impulse Winding Teser. Esimaion of Inducance by Impulse Response When he volage response is observed afer connecing an elecric charge sored up in he capaciy C o he coil L (including he inside
Automatic Power Factor Control Using Pic Microcontroller
 IDL - Inernaional Digial Library Of Available a:www.dbpublicaions.org 8 h Naional Conference on Advanced Techniques in Elecrical and Elecronics Engineering Inernaional e-journal For Technology And Research-2017
IDL - Inernaional Digial Library Of Available a:www.dbpublicaions.org 8 h Naional Conference on Advanced Techniques in Elecrical and Elecronics Engineering Inernaional e-journal For Technology And Research-2017
EE 330 Lecture 24. Amplification with Transistor Circuits Small Signal Modelling
 EE 330 Lecure 24 Amplificaion wih Transisor Circuis Small Signal Modelling Review from las ime Area Comparison beween BJT and MOSFET BJT Area = 3600 l 2 n-channel MOSFET Area = 168 l 2 Area Raio = 21:1
EE 330 Lecure 24 Amplificaion wih Transisor Circuis Small Signal Modelling Review from las ime Area Comparison beween BJT and MOSFET BJT Area = 3600 l 2 n-channel MOSFET Area = 168 l 2 Area Raio = 21:1
Exploration with Active Loop-Closing for FastSLAM
 Exploraion wih Acive Loop-Closing for FasSLAM Cyrill Sachniss Dirk Hähnel Wolfram Burgard Universiy of Freiburg Deparmen of Compuer Science D-79110 Freiburg, Germany Absrac Acquiring models of he environmen
Exploraion wih Acive Loop-Closing for FasSLAM Cyrill Sachniss Dirk Hähnel Wolfram Burgard Universiy of Freiburg Deparmen of Compuer Science D-79110 Freiburg, Germany Absrac Acquiring models of he environmen
Reducing Computational Load in Solution Separation for Kalman Filters and an Application to PPP Integrity
 Reducing Compuaional Load in Soluion Separaion for Kalman Filers and an Applicaion o PPP Inegriy Juan Blanch, Kaz Gunning, Todd Waler. Sanford Universiy Lance De Groo, Laura Norman. Hexagon Posiioning
Reducing Compuaional Load in Soluion Separaion for Kalman Filers and an Applicaion o PPP Inegriy Juan Blanch, Kaz Gunning, Todd Waler. Sanford Universiy Lance De Groo, Laura Norman. Hexagon Posiioning
Role of Kalman Filters in Probabilistic Algorithm
 Volume 118 No. 11 2018, 5-10 ISSN: 1311-8080 (prined version); ISSN: 1314-3395 (on-line version) url: hp://www.ijpam.eu doi: 10.12732/ijpam.v118i11.2 ijpam.eu Role of Kalman Filers in Probabilisic Algorihm
Volume 118 No. 11 2018, 5-10 ISSN: 1311-8080 (prined version); ISSN: 1314-3395 (on-line version) url: hp://www.ijpam.eu doi: 10.12732/ijpam.v118i11.2 ijpam.eu Role of Kalman Filers in Probabilisic Algorihm
An Automated Fish Counting Algorithm in Aquaculture Based on Image Processing
 Inernaional Forum on Mechanical, Conrol and Auomaion (IFMCA 06) An Auomaed Fish Couning Algorihm in Aquaculure Based on Image Processing Jiuyi Le,a, Lihong Xu,b College of Elecronics and Informaion Engineering,
Inernaional Forum on Mechanical, Conrol and Auomaion (IFMCA 06) An Auomaed Fish Couning Algorihm in Aquaculure Based on Image Processing Jiuyi Le,a, Lihong Xu,b College of Elecronics and Informaion Engineering,
A Cognitive Modeling of Space using Fingerprints of Places for Mobile Robot Navigation
 A Cogniive Modeling of Space using Fingerprins of Places for Mobile Robo Navigaion Adriana Tapus Roland Siegwar Ecole Polyechnique Fédérale de Lausanne (EPFL) Ecole Polyechnique Fédérale de Lausanne (EPFL)
A Cogniive Modeling of Space using Fingerprins of Places for Mobile Robo Navigaion Adriana Tapus Roland Siegwar Ecole Polyechnique Fédérale de Lausanne (EPFL) Ecole Polyechnique Fédérale de Lausanne (EPFL)
P. Bruschi: Project guidelines PSM Project guidelines.
 Projec guidelines. 1. Rules for he execuion of he projecs Projecs are opional. Their aim is o improve he sudens knowledge of he basic full-cusom design flow. The final score of he exam is no affeced by
Projec guidelines. 1. Rules for he execuion of he projecs Projecs are opional. Their aim is o improve he sudens knowledge of he basic full-cusom design flow. The final score of he exam is no affeced by
Journal of Next Generation Information Technology Volume 1, Number 2, August, 2010
 Journal of Nex Generaion Informaion Technology Volume, Number 2, Augus, 2 Sub band Speech analysis using Gammaone Filer banks and opimal pich exracion mehods for each sub band using average magniude difference
Journal of Nex Generaion Informaion Technology Volume, Number 2, Augus, 2 Sub band Speech analysis using Gammaone Filer banks and opimal pich exracion mehods for each sub band using average magniude difference
Distributed Multi-robot Exploration and Mapping
 1 Disribued Muli-robo Exploraion and Mapping Dieer Fox Jonahan Ko Kur Konolige Benson Limkekai Dirk Schulz Benjamin Sewar Universiy of Washingon, Deparmen of Compuer Science & Engineering, Seale, WA 98195
1 Disribued Muli-robo Exploraion and Mapping Dieer Fox Jonahan Ko Kur Konolige Benson Limkekai Dirk Schulz Benjamin Sewar Universiy of Washingon, Deparmen of Compuer Science & Engineering, Seale, WA 98195
Motion-blurred star image acquisition and restoration method based on the separable kernel Honglin Yuana, Fan Lib and Tao Yuc
 5h Inernaional Conference on Advanced Maerials and Compuer Science (ICAMCS 206) Moion-blurred sar image acquisiion and resoraion mehod based on he separable kernel Honglin Yuana, Fan Lib and Tao Yuc Beihang
5h Inernaional Conference on Advanced Maerials and Compuer Science (ICAMCS 206) Moion-blurred sar image acquisiion and resoraion mehod based on he separable kernel Honglin Yuana, Fan Lib and Tao Yuc Beihang
Hardware Design of Moving Object Detection on Reconfigurable System
 Journal of Compuer and Communicaions, 206, 4, 30-43 Published Online Augus 206 in SciRes. hp://www.scirp.org/journal/jcc hp://dx.doi.org/0.4236/jcc.206.40004 Hardware Design of Moving Objec Deecion on
Journal of Compuer and Communicaions, 206, 4, 30-43 Published Online Augus 206 in SciRes. hp://www.scirp.org/journal/jcc hp://dx.doi.org/0.4236/jcc.206.40004 Hardware Design of Moving Objec Deecion on
A new image security system based on cellular automata and chaotic systems
 A new image securiy sysem based on cellular auomaa and chaoic sysems Weinan Wang Jan 2013 Absrac A novel image encrypion scheme based on Cellular Auomaa and chaoic sysem is proposed in his paper. The suggesed
A new image securiy sysem based on cellular auomaa and chaoic sysems Weinan Wang Jan 2013 Absrac A novel image encrypion scheme based on Cellular Auomaa and chaoic sysem is proposed in his paper. The suggesed
Pulse Train Controlled PCCM Buck-Boost Converter Ming Qina, Fangfang Lib
 5h Inernaional Conference on Environmen, Maerials, Chemisry and Power Elecronics (EMCPE 016 Pulse Train Conrolled PCCM Buck-Boos Converer Ming Qina, Fangfang ib School of Elecrical Engineering, Zhengzhou
5h Inernaional Conference on Environmen, Maerials, Chemisry and Power Elecronics (EMCPE 016 Pulse Train Conrolled PCCM Buck-Boos Converer Ming Qina, Fangfang ib School of Elecrical Engineering, Zhengzhou
GaN-HEMT Dynamic ON-state Resistance characterisation and Modelling
 GaN-HEMT Dynamic ON-sae Resisance characerisaion and Modelling Ke Li, Paul Evans, Mark Johnson Power Elecronics, Machine and Conrol group Universiy of Noingham, UK Email: ke.li@noingham.ac.uk, paul.evans@noingham.ac.uk,
GaN-HEMT Dynamic ON-sae Resisance characerisaion and Modelling Ke Li, Paul Evans, Mark Johnson Power Elecronics, Machine and Conrol group Universiy of Noingham, UK Email: ke.li@noingham.ac.uk, paul.evans@noingham.ac.uk,
Abstract. 1 Introduction
 Texure and Disincness Analysis for Naural Feaure Exracion Kai-Ming Kiang, Richard Willgoss School of Mechanical and Manufacuring Engineering, Universiy of New Souh Wales, Sydne NSW 2052, Ausralia. kai-ming.kiang@suden.unsw.edu.au,
Texure and Disincness Analysis for Naural Feaure Exracion Kai-Ming Kiang, Richard Willgoss School of Mechanical and Manufacuring Engineering, Universiy of New Souh Wales, Sydne NSW 2052, Ausralia. kai-ming.kiang@suden.unsw.edu.au,
A Smart Sensor with Hyperspectral/Range Fovea and Panoramic Peripheral View
 A Smar Sensor wih Hyperspecral/Range Fovea and Panoramic Peripheral View Tao Wang,2, Zhigang Zhu,2 and Harvey Rhody 3 Deparmen of Compuer Science, The Ciy College of New York 38 h Sree and Conven Avenue,
A Smar Sensor wih Hyperspecral/Range Fovea and Panoramic Peripheral View Tao Wang,2, Zhigang Zhu,2 and Harvey Rhody 3 Deparmen of Compuer Science, The Ciy College of New York 38 h Sree and Conven Avenue,
Noise Reduction/Mode Isolation with Adaptive Down Conversion (ADC)
") Page 1 Noise Reducion/Mode Isolaion wih Adapive Down Conversion (ADC) Abel B. Diaz, Thomas W. Tunnell NSTec Los Alamos Operaions Presened o PDV Workshop 8-16-2007 Page 2 Summary Adapive down conversion
Page 1 Noise Reducion/Mode Isolaion wih Adapive Down Conversion (ADC) Abel B. Diaz, Thomas W. Tunnell NSTec Los Alamos Operaions Presened o PDV Workshop 8-16-2007 Page 2 Summary Adapive down conversion
Double Tangent Sampling Method for Sinusoidal Pulse Width Modulation
 Compuaional and Applied Mahemaics Journal 2018; 4(1): 8-14 hp://www.aasci.org/journal/camj ISS: 2381-1218 (Prin); ISS: 2381-1226 (Online) Double Tangen Sampling Mehod for Sinusoidal Pulse Widh Modulaion
Compuaional and Applied Mahemaics Journal 2018; 4(1): 8-14 hp://www.aasci.org/journal/camj ISS: 2381-1218 (Prin); ISS: 2381-1226 (Online) Double Tangen Sampling Mehod for Sinusoidal Pulse Widh Modulaion
A New and Robust Segmentation Technique Based on Pixel Gradient and Nearest Neighbors for Efficient Classification of MRI Images
 A New and Robus Segmenaion Technique Based on Pixel Gradien and Neares Neighbors for Efficien Classificaion of MRI Images Sanchi Kumar, Sahil Dalal Absrac This paper proposes a new fully auomaed mehod
A New and Robus Segmenaion Technique Based on Pixel Gradien and Neares Neighbors for Efficien Classificaion of MRI Images Sanchi Kumar, Sahil Dalal Absrac This paper proposes a new fully auomaed mehod
5 Spatial Relations on Lines
 5 Spaial Relaions on Lines There are number of useful problems ha can be solved wih he basic consrucion echniques developed hus far. We now look a cerain problems, which involve spaial relaionships beween
5 Spaial Relaions on Lines There are number of useful problems ha can be solved wih he basic consrucion echniques developed hus far. We now look a cerain problems, which involve spaial relaionships beween
Development of Temporary Ground Wire Detection Device
 Inernaional Journal of Smar Grid and Clean Energy Developmen of Temporary Ground Wire Deecion Device Jing Jiang* and Tao Yu a Elecric Power College, Souh China Universiy of Technology, Guangzhou 5164,
Inernaional Journal of Smar Grid and Clean Energy Developmen of Temporary Ground Wire Deecion Device Jing Jiang* and Tao Yu a Elecric Power College, Souh China Universiy of Technology, Guangzhou 5164,
ECE-517 Reinforcement Learning in Artificial Intelligence
 ECE-517 Reinforcemen Learning in Arificial Inelligence Lecure 11: Temporal Difference Learning (con.), Eligibiliy Traces Ocober 8, 2015 Dr. Iamar Arel College of Engineering Deparmen of Elecrical Engineering
ECE-517 Reinforcemen Learning in Arificial Inelligence Lecure 11: Temporal Difference Learning (con.), Eligibiliy Traces Ocober 8, 2015 Dr. Iamar Arel College of Engineering Deparmen of Elecrical Engineering
Adaptive Approach Based on Curve Fitting and Interpolation for Boundary Effects Reduction
 Adapive Approach Based on Curve Fiing and Inerpolaion for Boundary Effecs Reducion HANG SU, JINGSONG LI School of Informaion Engineering Wuhan Universiy of Technology 122 Loushi Road, Wuhan CHINA hangsu@whu.edu.cn,
Adapive Approach Based on Curve Fiing and Inerpolaion for Boundary Effecs Reducion HANG SU, JINGSONG LI School of Informaion Engineering Wuhan Universiy of Technology 122 Loushi Road, Wuhan CHINA hangsu@whu.edu.cn,
HIGH THROUGHPUT EVALUATION OF SHA-1 IMPLEMENTATION USING UNFOLDING TRANSFORMATION
 VOL., NO. 5, MARCH 26 ISSN 89-668 26-26 Asian Research Publishing Nework (ARPN). All righs reserved. HIGH THROUGHPUT EVALUATION OF SHA- IMPLEMENTATION USING UNFOLDING TRANSFORMATION Shamsiah Bini Suhaili
VOL., NO. 5, MARCH 26 ISSN 89-668 26-26 Asian Research Publishing Nework (ARPN). All righs reserved. HIGH THROUGHPUT EVALUATION OF SHA- IMPLEMENTATION USING UNFOLDING TRANSFORMATION Shamsiah Bini Suhaili
SLAM Algorithm for 2D Object Trajectory Tracking based on RFID Passive Tags
 2008 IEEE Inernaional Conference on RFID The Veneian, Las Vegas, Nevada, USA April 16-17, 2008 1C2.2 SLAM Algorihm for 2D Objec Trajecory Tracking based on RFID Passive Tags Po Yang, Wenyan Wu, Mansour
2008 IEEE Inernaional Conference on RFID The Veneian, Las Vegas, Nevada, USA April 16-17, 2008 1C2.2 SLAM Algorihm for 2D Objec Trajecory Tracking based on RFID Passive Tags Po Yang, Wenyan Wu, Mansour
A New Voltage Sag and Swell Compensator Switched by Hysteresis Voltage Control Method
 Proceedings of he 8h WSEAS Inernaional Conference on ELECTRIC POWER SYSTEMS, HIGH VOLTAGES, ELECTRIC MACHINES (POWER '8) A New Volage Sag and Swell Compensaor Swiched by Hyseresis Volage Conrol Mehod AMIR
Proceedings of he 8h WSEAS Inernaional Conference on ELECTRIC POWER SYSTEMS, HIGH VOLTAGES, ELECTRIC MACHINES (POWER '8) A New Volage Sag and Swell Compensaor Swiched by Hyseresis Volage Conrol Mehod AMIR
Variation Aware Cross-Talk Aggressor Alignment by Mixed Integer Linear Programming
 ariaion Aware Cross-alk Aggressor Alignmen by Mixed Ineger Linear Programming ladimir Zoloov IBM. J. Wason Research Cener, Yorkown Heighs, NY zoloov@us.ibm.com Peer Feldmann D. E. Shaw Research, New York,
ariaion Aware Cross-alk Aggressor Alignmen by Mixed Ineger Linear Programming ladimir Zoloov IBM. J. Wason Research Cener, Yorkown Heighs, NY zoloov@us.ibm.com Peer Feldmann D. E. Shaw Research, New York,
Autonomous Humanoid Navigation Using Laser and Odometry Data
 Auonomous Humanoid Navigaion Using Laser and Odomery Daa Ricardo Tellez, Francesco Ferro, Dario Mora, Daniel Pinyol and Davide Faconi Absrac In his paper we presen a novel approach o legged humanoid navigaion
Auonomous Humanoid Navigaion Using Laser and Odomery Daa Ricardo Tellez, Francesco Ferro, Dario Mora, Daniel Pinyol and Davide Faconi Absrac In his paper we presen a novel approach o legged humanoid navigaion
Development of an Efficient Algorithm for Fetal Heart Rate Detection: A Hardware Approach
 Developmen of an Efficien Algorihm for Hear Rae Deecion: A Hardware Approach M. I. IBRAHIMY, M. B. I. REAZ 2, M. A. MOHD ALI 3, T. H. KHOON 2, A. F. ISMAIL Kulliyyah of Engineering, Inernaional Islamic
Developmen of an Efficien Algorihm for Hear Rae Deecion: A Hardware Approach M. I. IBRAHIMY, M. B. I. REAZ 2, M. A. MOHD ALI 3, T. H. KHOON 2, A. F. ISMAIL Kulliyyah of Engineering, Inernaional Islamic
2600 Capitol Avenue Suite 200 Sacramento, CA phone fax
 26 Capiol Avenue Suie 2 Sacrameno, CA 9816 916.64.4 phone 916.64.41 fax www.esassoc.com memorandum dae Sepember 2, 216 o from subjec Richard Rich, Ciy of Sacrameno; Jeffrey Dorso, Pioneer Law Group Brian
26 Capiol Avenue Suie 2 Sacrameno, CA 9816 916.64.4 phone 916.64.41 fax www.esassoc.com memorandum dae Sepember 2, 216 o from subjec Richard Rich, Ciy of Sacrameno; Jeffrey Dorso, Pioneer Law Group Brian
Demodulation Based Testing of Off Chip Driver Performance
 Demodulaion Based Tesing of Off Driver Performance Wilfried Daehn Hochschule Magdeburg-Sendahl Fachbereich Elekroechnik Posfach 368 39 Magdeburg Phone: ++49 39 886 4673 Fa: ++49 39 886 426 Email: wilfried.daehn@compuer.org
Demodulaion Based Tesing of Off Driver Performance Wilfried Daehn Hochschule Magdeburg-Sendahl Fachbereich Elekroechnik Posfach 368 39 Magdeburg Phone: ++49 39 886 4673 Fa: ++49 39 886 426 Email: wilfried.daehn@compuer.org
Investigation and Simulation Model Results of High Density Wireless Power Harvesting and Transfer Method
 Invesigaion and Simulaion Model Resuls of High Densiy Wireless Power Harvesing and Transfer Mehod Jaber A. Abu Qahouq, Senior Member, IEEE, and Zhigang Dang The Universiy of Alabama Deparmen of Elecrical
Invesigaion and Simulaion Model Resuls of High Densiy Wireless Power Harvesing and Transfer Mehod Jaber A. Abu Qahouq, Senior Member, IEEE, and Zhigang Dang The Universiy of Alabama Deparmen of Elecrical
BOUNCER CIRCUIT FOR A 120 MW/370 KV SOLID STATE MODULATOR
 BOUNCER CIRCUIT FOR A 120 MW/370 KV SOLID STATE MODULATOR D. Gerber, J. Biela Laboraory for High Power Elecronic Sysems ETH Zurich, Physiksrasse 3, CH-8092 Zurich, Swizerland Email: gerberdo@ehz.ch This
BOUNCER CIRCUIT FOR A 120 MW/370 KV SOLID STATE MODULATOR D. Gerber, J. Biela Laboraory for High Power Elecronic Sysems ETH Zurich, Physiksrasse 3, CH-8092 Zurich, Swizerland Email: gerberdo@ehz.ch This
Laplacian Mixture Modeling for Overcomplete Mixing Matrix in Wavelet Packet Domain by Adaptive EM-type Algorithm and Comparisons
 Proceedings of he 5h WSEAS Inernaional Conference on Signal Processing, Isanbul, urey, May 7-9, 6 (pp45-5) Laplacian Mixure Modeling for Overcomplee Mixing Marix in Wavele Pace Domain by Adapive EM-ype
Proceedings of he 5h WSEAS Inernaional Conference on Signal Processing, Isanbul, urey, May 7-9, 6 (pp45-5) Laplacian Mixure Modeling for Overcomplee Mixing Marix in Wavele Pace Domain by Adapive EM-ype
Phase-Shifting Control of Double Pulse in Harmonic Elimination Wei Peng1, a*, Junhong Zhang1, Jianxin gao1, b, Guangyi Li1, c
 Inernaional Symposium on Mechanical Engineering and Maerial Science (ISMEMS 016 Phase-Shifing Conrol of Double Pulse in Harmonic Eliminaion Wei Peng1, a*, Junhong Zhang1, Jianxin gao1, b, Guangyi i1, c
Inernaional Symposium on Mechanical Engineering and Maerial Science (ISMEMS 016 Phase-Shifing Conrol of Double Pulse in Harmonic Eliminaion Wei Peng1, a*, Junhong Zhang1, Jianxin gao1, b, Guangyi i1, c
Answer Key for Week 3 Homework = 100 = 140 = 138
 Econ 110D Fall 2009 K.D. Hoover Answer Key for Week 3 Homework Problem 4.1 a) Laspeyres price index in 2006 = 100 (1 20) + (0.75 20) Laspeyres price index in 2007 = 100 (0.75 20) + (0.5 20) 20 + 15 = 100
Econ 110D Fall 2009 K.D. Hoover Answer Key for Week 3 Homework Problem 4.1 a) Laspeyres price index in 2006 = 100 (1 20) + (0.75 20) Laspeyres price index in 2007 = 100 (0.75 20) + (0.5 20) 20 + 15 = 100
Control and Protection Strategies for Matrix Converters. Control and Protection Strategies for Matrix Converters
 Conrol and Proecion Sraegies for Marix Converers Dr. Olaf Simon, Siemens AG, A&D SD E 6, Erlangen Manfred Bruckmann, Siemens AG, A&D SD E 6, Erlangen Conrol and Proecion Sraegies for Marix Converers To
Conrol and Proecion Sraegies for Marix Converers Dr. Olaf Simon, Siemens AG, A&D SD E 6, Erlangen Manfred Bruckmann, Siemens AG, A&D SD E 6, Erlangen Conrol and Proecion Sraegies for Marix Converers To
sensors ISSN
 Sensors 2011, 11, 6328-6353; doi:10.3390/s110606328 OPEN ACCESS sensors ISSN 1424-8220 www.mdpi.com/journal/sensors Aricle Auomaic Fores-Fire Measuring Using Ground Saions and Unmanned Aerial Sysems JoséRamiro
Sensors 2011, 11, 6328-6353; doi:10.3390/s110606328 OPEN ACCESS sensors ISSN 1424-8220 www.mdpi.com/journal/sensors Aricle Auomaic Fores-Fire Measuring Using Ground Saions and Unmanned Aerial Sysems JoséRamiro
Moving Object Localization Based on UHF RFID Phase and Laser Clustering
 sensors Aricle Moving Objec Localizaion Based on UHF RFID Phase and Laser Clusering Yulu Fu 1, Changlong Wang 1, Ran Liu 1,2, * ID, Gaoli Liang 1, Hua Zhang 1 and Shafiq Ur Rehman 1,3 1 School of Informaion
sensors Aricle Moving Objec Localizaion Based on UHF RFID Phase and Laser Clusering Yulu Fu 1, Changlong Wang 1, Ran Liu 1,2, * ID, Gaoli Liang 1, Hua Zhang 1 and Shafiq Ur Rehman 1,3 1 School of Informaion
Architectures for Resource Reservation Modules for Optical Burst Switching Core Nodes *
 4. ITG-Fachagung Phoonic Neworks, May 5. - 6., 2003, Leipzig, Germany Archiecures for Resource Reservaion Modules for Opical Burs Swiching Core Nodes * Sascha Junghans, Chrisoph M. Gauger Universiy of
4. ITG-Fachagung Phoonic Neworks, May 5. - 6., 2003, Leipzig, Germany Archiecures for Resource Reservaion Modules for Opical Burs Swiching Core Nodes * Sascha Junghans, Chrisoph M. Gauger Universiy of
Acquiring hand-action models by attention point analysis
 Acquiring hand-acion models by aenion poin analysis Koichi Ogawara Soshi Iba y Tomikazu Tanuki yy Hiroshi Kimura yyy Kasushi Ikeuchi Insiue of Indusrial Science, Univ. of Tokyo, Tokyo, 106-8558, JAPAN
Acquiring hand-acion models by aenion poin analysis Koichi Ogawara Soshi Iba y Tomikazu Tanuki yy Hiroshi Kimura yyy Kasushi Ikeuchi Insiue of Indusrial Science, Univ. of Tokyo, Tokyo, 106-8558, JAPAN
3D Laser Scan Registration of Dual-Robot System Using Vision
 3D Laser Scan Regisraion of Dual-Robo Sysem Using Vision Ravi Kaushik, Jizhong Xiao*, William Morris and Zhigang Zhu Absrac This paper presens a novel echnique o regiser a se of wo 3D laser scans obained
3D Laser Scan Regisraion of Dual-Robo Sysem Using Vision Ravi Kaushik, Jizhong Xiao*, William Morris and Zhigang Zhu Absrac This paper presens a novel echnique o regiser a se of wo 3D laser scans obained
NEURAL NETWORK APPROACH TO BAYESIAN BACKGROUND MODELING FOR VIDEO OBJECT SEGMENTATION
 NEURAL NETWORK APPROACH TO BAYESIAN BACKGROUND MODELING FOR VIDEO OBJECT SEGMENTATION Dubravko Ćulibrk, Oge Marques, Daniel Socek, Hari Kalva and Borko Furh Deparmen of Compuer Science and Engineering
NEURAL NETWORK APPROACH TO BAYESIAN BACKGROUND MODELING FOR VIDEO OBJECT SEGMENTATION Dubravko Ćulibrk, Oge Marques, Daniel Socek, Hari Kalva and Borko Furh Deparmen of Compuer Science and Engineering
A novel quasi-peak-detector for time-domain EMI-measurements F. Krug, S. Braun, and P. Russer Abstract. Advanced TDEMI measurement concept
 Advances in Radio Science (24) 2: 27 32 Copernicus GmbH 24 Advances in Radio Science A novel quasi-peak-deecor for ime-domain EMI-measuremens F. Krug, S. Braun, and P. Russer Insiue for High-Frequency
Advances in Radio Science (24) 2: 27 32 Copernicus GmbH 24 Advances in Radio Science A novel quasi-peak-deecor for ime-domain EMI-measuremens F. Krug, S. Braun, and P. Russer Insiue for High-Frequency
Sketch-based Image Retrieval Using Contour Segments
 Skech-based Image Rerieval Using Conour Segmens Yuing Zhang #1, Xueming Qian *2, Xianglong Tan #3 # SMLESLAB of Xi an Jiaoong Universiy, Xi an CN710049, China 1 zhangyuing@su.xju.edu.cn 2 qianxm@mail.xju.edu.cn
Skech-based Image Rerieval Using Conour Segmens Yuing Zhang #1, Xueming Qian *2, Xianglong Tan #3 # SMLESLAB of Xi an Jiaoong Universiy, Xi an CN710049, China 1 zhangyuing@su.xju.edu.cn 2 qianxm@mail.xju.edu.cn
A-LEVEL Electronics. ELEC4 Programmable Control Systems Mark scheme June Version: 1.0 Final
 A-LEVEL Elecronics ELEC4 Programmable Conrol Sysems scheme 243 June 26 Version:. Final schemes are prepared by he Lead Assessmen Wrier and considered, ogeher wih he relevan quesions, by a panel of subjec
A-LEVEL Elecronics ELEC4 Programmable Conrol Sysems scheme 243 June 26 Version:. Final schemes are prepared by he Lead Assessmen Wrier and considered, ogeher wih he relevan quesions, by a panel of subjec
Receiver-Initiated vs. Short-Preamble Burst MAC Approaches for Multi-channel Wireless Sensor Networks
 Receiver-Iniiaed vs. Shor-Preamble Burs MAC Approaches for Muli-channel Wireless Sensor Neworks Crisina Cano, Boris Bellala, and Miquel Oliver Universia Pompeu Fabra, C/ Tànger 122-140, 08018 Barcelona,
Receiver-Iniiaed vs. Shor-Preamble Burs MAC Approaches for Muli-channel Wireless Sensor Neworks Crisina Cano, Boris Bellala, and Miquel Oliver Universia Pompeu Fabra, C/ Tànger 122-140, 08018 Barcelona,
Improving the Performance of Single Chip Image Capture Devices
 Digial Commons@ Loyola Marymoun Universiy and Loyola Law School Elecrical Engineering & Compuer Science Faculy Works Elecrical Engineering & Compuer Science --2003 Improving he Performance of Single Chip
Digial Commons@ Loyola Marymoun Universiy and Loyola Law School Elecrical Engineering & Compuer Science Faculy Works Elecrical Engineering & Compuer Science --2003 Improving he Performance of Single Chip
Optical phase locked loop for transparent inter-satellite communications
 Opical phase locked loop for ransparen iner-saellie communicaions F. Herzog 1, K. Kudielka 2,D.Erni 1 and W. Bächold 1 1 Communicaion Phoonics Group, Laboraory for Elecromagneic Fields and Microwave Elecronics,
Opical phase locked loop for ransparen iner-saellie communicaions F. Herzog 1, K. Kudielka 2,D.Erni 1 and W. Bächold 1 1 Communicaion Phoonics Group, Laboraory for Elecromagneic Fields and Microwave Elecronics,
Spring Localization I. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2017 Localizaion I Localizaion I 10.04.2017 1 2 ASL Auonomous Sysems Lab knowledge, daa base mission commands Localizaion Map Building environmen model local map posiion global map Cogniion Pah
Spring 2017 Localizaion I Localizaion I 10.04.2017 1 2 ASL Auonomous Sysems Lab knowledge, daa base mission commands Localizaion Map Building environmen model local map posiion global map Cogniion Pah
Pushing towards the Limit of Sampling Rate: Adaptive Chasing Sampling
 Pushing owards he Limi of Sampling Rae: Adapive Chasing Sampling Ying Li, Kun Xie, Xin Wang Dep of Elecrical and Compuer Engineering, Sony Brook Universiy, USA College of Compuer Science and Elecronics
Pushing owards he Limi of Sampling Rae: Adapive Chasing Sampling Ying Li, Kun Xie, Xin Wang Dep of Elecrical and Compuer Engineering, Sony Brook Universiy, USA College of Compuer Science and Elecronics
Fault Diagnosis System Identification Based on Impedance Matching Balance Transformer
 Inernaional Conference on Advanced Maerial Science and Environmenal Engineering (AMSEE 06) Faul Diagnosis Sysem Idenificaion Based on Impedance Maching Balance ransformer Yanjun Ren* and Xinli Deng Chongqing
Inernaional Conference on Advanced Maerial Science and Environmenal Engineering (AMSEE 06) Faul Diagnosis Sysem Idenificaion Based on Impedance Maching Balance ransformer Yanjun Ren* and Xinli Deng Chongqing
TELE4652 Mobile and Satellite Communications
 TELE465 Mobile and Saellie Communicaions Assignmen (Due: 4pm, Monday 7 h Ocober) To be submied o he lecurer before he beginning of he final lecure o be held a his ime.. This quesion considers Minimum Shif
TELE465 Mobile and Saellie Communicaions Assignmen (Due: 4pm, Monday 7 h Ocober) To be submied o he lecurer before he beginning of he final lecure o be held a his ime.. This quesion considers Minimum Shif
A Comparison of EKF, UKF, FastSLAM2.0, and UKF-based FastSLAM Algorithms
 A Comparison of,, FasSLAM., and -based FasSLAM Algorihms Zeyneb Kur-Yavuz and Sırma Yavuz Compuer Engineering Deparmen, Yildiz Technical Universiy, Isanbul, Turkey zeyneb@ce.yildiz.edu.r, sirma@ce.yildiz.edu.r
A Comparison of,, FasSLAM., and -based FasSLAM Algorihms Zeyneb Kur-Yavuz and Sırma Yavuz Compuer Engineering Deparmen, Yildiz Technical Universiy, Isanbul, Turkey zeyneb@ce.yildiz.edu.r, sirma@ce.yildiz.edu.r
EXPERIMENT #4 AM MODULATOR AND POWER AMPLIFIER
 EXPERIMENT #4 AM MODULATOR AND POWER AMPLIFIER INTRODUCTION: Being able o ransmi a radio frequency carrier across space is of no use unless we can place informaion or inelligence upon i. This las ransmier
EXPERIMENT #4 AM MODULATOR AND POWER AMPLIFIER INTRODUCTION: Being able o ransmi a radio frequency carrier across space is of no use unless we can place informaion or inelligence upon i. This las ransmier
Dead Zone Compensation Method of H-Bridge Inverter Series Structure
 nd Inernaional Conference on Elecrical, Auomaion and Mechanical Engineering (EAME 7) Dead Zone Compensaion Mehod of H-Bridge Inverer Series Srucure Wei Li Insiue of Elecrical Engineering and Informaion
nd Inernaional Conference on Elecrical, Auomaion and Mechanical Engineering (EAME 7) Dead Zone Compensaion Mehod of H-Bridge Inverer Series Srucure Wei Li Insiue of Elecrical Engineering and Informaion
Increasing multi-trackers robustness with a segmentation algorithm
 Increasing muli-rackers robusness wih a segmenaion algorihm MARTA MARRÓN, MIGUEL ÁNGEL SOTELO, JUAN CARLOS GARCÍA Elecronics Deparmen Universiy of Alcala Campus Universiario. 28871, Alcalá de Henares.
Increasing muli-rackers robusness wih a segmenaion algorihm MARTA MARRÓN, MIGUEL ÁNGEL SOTELO, JUAN CARLOS GARCÍA Elecronics Deparmen Universiy of Alcala Campus Universiario. 28871, Alcalá de Henares.
Lab 3 Acceleration. What You Need To Know: Physics 211 Lab
 b Lab 3 Acceleraion Wha You Need To Know: The Physics In he previous lab you learned ha he velociy of an objec can be deermined by finding he slope of he objec s posiion vs. ime graph. x v ave. = v ave.
b Lab 3 Acceleraion Wha You Need To Know: The Physics In he previous lab you learned ha he velociy of an objec can be deermined by finding he slope of he objec s posiion vs. ime graph. x v ave. = v ave.
EE 40 Final Project Basic Circuit
 EE 0 Spring 2006 Final Projec EE 0 Final Projec Basic Circui Par I: General insrucion 1. The final projec will coun 0% of he lab grading, since i s going o ake lab sessions. All oher individual labs will
EE 0 Spring 2006 Final Projec EE 0 Final Projec Basic Circui Par I: General insrucion 1. The final projec will coun 0% of he lab grading, since i s going o ake lab sessions. All oher individual labs will
Optical Short Pulse Generation and Measurement Based on Fiber Polarization Effects
 Opical Shor Pulse Generaion and Measuremen Based on Fiber Polarizaion Effecs Changyuan Yu Deparmen of Elecrical & Compuer Engineering, Naional Universiy of Singapore, Singapore, 117576 A*STAR Insiue for
Opical Shor Pulse Generaion and Measuremen Based on Fiber Polarizaion Effecs Changyuan Yu Deparmen of Elecrical & Compuer Engineering, Naional Universiy of Singapore, Singapore, 117576 A*STAR Insiue for
DrunkWalk: Collaborative and Adaptive Planning for Navigation of Micro-Aerial Sensor Swarms
 DrunkWalk: Collaboraive and Adapive Planning for Navigaion of Micro-Aerial Sensor Swarms Xinlei Chen Carnegie Mellon Universiy Pisburgh, PA, USA xinlei.chen@sv.cmu.edu Aveek Purohi Carnegie Mellon Universiy
DrunkWalk: Collaboraive and Adapive Planning for Navigaion of Micro-Aerial Sensor Swarms Xinlei Chen Carnegie Mellon Universiy Pisburgh, PA, USA xinlei.chen@sv.cmu.edu Aveek Purohi Carnegie Mellon Universiy
Wrap Up. Fourier Transform Sampling, Modulation, Filtering Noise and the Digital Abstraction Binary signaling model and Shannon Capacity
 Wrap Up Fourier ransorm Sampling, Modulaion, Filering Noise and he Digial Absracion Binary signaling model and Shannon Capaciy Copyrigh 27 by M.H. Perro All righs reserved. M.H. Perro 27 Wrap Up, Slide
Wrap Up Fourier ransorm Sampling, Modulaion, Filering Noise and he Digial Absracion Binary signaling model and Shannon Capaciy Copyrigh 27 by M.H. Perro All righs reserved. M.H. Perro 27 Wrap Up, Slide
Application of Neural Q-Learning Controllers on the Khepera II via Webots Software
 Inernaional Conference on Fascinaing Advancemen in Mechanical Engineering (FAME2008), 11-13, December 2008 Applicaion of Neural Q-Learning s on he Khepera II via Webos Sofware Velappa Ganapahy and Wen
Inernaional Conference on Fascinaing Advancemen in Mechanical Engineering (FAME2008), 11-13, December 2008 Applicaion of Neural Q-Learning s on he Khepera II via Webos Sofware Velappa Ganapahy and Wen
Analysis of Low Density Codes and Improved Designs Using Irregular Graphs
 Analysis of Low Densiy Codes and Improved Designs Using Irregular Graphs Michael G. Luby Michael Mizenmacher M. Amin Shokrollahi Daniel A. Spielman Absrac In [6], Gallager inroduces a family of codes based
Analysis of Low Densiy Codes and Improved Designs Using Irregular Graphs Michael G. Luby Michael Mizenmacher M. Amin Shokrollahi Daniel A. Spielman Absrac In [6], Gallager inroduces a family of codes based
Social-aware Dynamic Router Node Placement in Wireless Mesh Networks
 Social-aware Dynamic Rouer Node Placemen in Wireless Mesh Neworks Chun-Cheng Lin Pei-Tsung Tseng Ting-Yu Wu Der-Jiunn Deng ** Absrac The problem of dynamic rouer node placemen (dynrnp) in wireless mesh
Social-aware Dynamic Rouer Node Placemen in Wireless Mesh Neworks Chun-Cheng Lin Pei-Tsung Tseng Ting-Yu Wu Der-Jiunn Deng ** Absrac The problem of dynamic rouer node placemen (dynrnp) in wireless mesh
VISION BASED AUTONOMOUS LATERAL AND LONGITUDINAL CONTROL SYSTEM
 VISION BASED AUTONOMOUS LATERAL AND LONGITUDINAL CONTROL SYSTEM D.Sivaraj 1 A.Kandaswamy 2 V.Rajasekar 3 P.B.SankarGanesh 4 1,3,4 Deparmen of Elec. & Comm. Engg., PSG College of Technology, Coimbaore dsr@ece.psgech.ac.in
VISION BASED AUTONOMOUS LATERAL AND LONGITUDINAL CONTROL SYSTEM D.Sivaraj 1 A.Kandaswamy 2 V.Rajasekar 3 P.B.SankarGanesh 4 1,3,4 Deparmen of Elec. & Comm. Engg., PSG College of Technology, Coimbaore dsr@ece.psgech.ac.in
A Complexity Reliability Model
 20h Inernaional Symposium on Sofware Reliabiliy Engineering A Complexiy Reliabiliy Model orm Schneidewind 1 and Mike Hinchey 2 1 aval Posgraduae School, Monerey, CA, USA 2 Lero he Irish Sofware Engineering
20h Inernaional Symposium on Sofware Reliabiliy Engineering A Complexiy Reliabiliy Model orm Schneidewind 1 and Mike Hinchey 2 1 aval Posgraduae School, Monerey, CA, USA 2 Lero he Irish Sofware Engineering
Lecture 4. EITN Chapter 12, 13 Modulation and diversity. Antenna noise is usually given as a noise temperature!
 Lecure 4 EITN75 2018 Chaper 12, 13 Modulaion and diversiy Receiver noise: repeiion Anenna noise is usually given as a noise emperaure! Noise facors or noise figures of differen sysem componens are deermined
Lecure 4 EITN75 2018 Chaper 12, 13 Modulaion and diversiy Receiver noise: repeiion Anenna noise is usually given as a noise emperaure! Noise facors or noise figures of differen sysem componens are deermined
Auto-Tuning of PID Controllers via Extremum Seeking
 25 American Conrol Conference June 8-, 25. Porland, OR, USA ThA7.2 Auo-Tuning of PID Conrollers via Exremum Seeking Nick illingsworh* and Miroslav rsić Deparmen of Mechanical and Aerospace Engineering
25 American Conrol Conference June 8-, 25. Porland, OR, USA ThA7.2 Auo-Tuning of PID Conrollers via Exremum Seeking Nick illingsworh* and Miroslav rsić Deparmen of Mechanical and Aerospace Engineering
Estimation of Automotive Target Trajectories by Kalman Filtering
 Buleinul Şiinţific al Universiăţii "Poliehnica" din imişoara Seria ELECRONICĂ şi ELECOMUNICAŢII RANSACIONS on ELECRONICS and COMMUNICAIONS om 58(72), Fascicola 1, 2013 Esimaion of Auomoive arge rajecories
Buleinul Şiinţific al Universiăţii "Poliehnica" din imişoara Seria ELECRONICĂ şi ELECOMUNICAŢII RANSACIONS on ELECRONICS and COMMUNICAIONS om 58(72), Fascicola 1, 2013 Esimaion of Auomoive arge rajecories
MAP-AIDED POSITIONING SYSTEM
 Paper Code: F02I131 MAP-AIDED POSITIONING SYSTEM Forssell, Urban 1 Hall, Peer 1 Ahlqvis, Sefan 1 Gusafsson, Fredrik 2 1 NIRA Dynamics AB, Sweden; 2 Linköpings universie, Sweden Keywords Posiioning; Navigaion;
Paper Code: F02I131 MAP-AIDED POSITIONING SYSTEM Forssell, Urban 1 Hall, Peer 1 Ahlqvis, Sefan 1 Gusafsson, Fredrik 2 1 NIRA Dynamics AB, Sweden; 2 Linköpings universie, Sweden Keywords Posiioning; Navigaion;
ACTIVITY BASED COSTING FOR MARITIME ENTERPRISES
 ACTIVITY BASED COSTING FOR MARITIME ENTERPRISES 1, a 2, b 3, c 4, c Sualp Omer Urkmez David Sockon Reza Ziarai Erdem Bilgili a, b De Monfor Universiy, UK, c TUDEV, Insiue of Mariime Sudies, Turkey 1 sualp@furrans.com.r
ACTIVITY BASED COSTING FOR MARITIME ENTERPRISES 1, a 2, b 3, c 4, c Sualp Omer Urkmez David Sockon Reza Ziarai Erdem Bilgili a, b De Monfor Universiy, UK, c TUDEV, Insiue of Mariime Sudies, Turkey 1 sualp@furrans.com.r
EE368/CS232 Digital Image Processing Winter Homework #1 Released: Monday, January 8 Due: Wednesday, January 17, 1:30pm
 EE368/CS232 Digial Image Processing Winer 207-208 Lecure Review and Quizzes (Due: Wednesday, January 7, :30pm) Please review wha you have learned in class and hen complee he online quiz quesions for he
EE368/CS232 Digial Image Processing Winer 207-208 Lecure Review and Quizzes (Due: Wednesday, January 7, :30pm) Please review wha you have learned in class and hen complee he online quiz quesions for he
Power Efficient Battery Charger by Using Constant Current/Constant Voltage Controller
 Circuis and Sysems, 01, 3, 180-186 hp://dx.doi.org/10.436/cs.01.304 Published Online April 01 (hp://www.scirp.org/journal/cs) Power Efficien Baery Charger by Using Consan Curren/Consan olage Conroller
Circuis and Sysems, 01, 3, 180-186 hp://dx.doi.org/10.436/cs.01.304 Published Online April 01 (hp://www.scirp.org/journal/cs) Power Efficien Baery Charger by Using Consan Curren/Consan olage Conroller
White paper. RC223 (type B) residual-current release
 residual-current release") Whie paper (ype B) residual-curren release (ype B) residual curren release Index 1. Generals... 2 2. Applicaion descripion... 3 2.1 Applicaions...3 2.2 Applicaion examples...4 2.3 How does an operae?...6
Whie paper (ype B) residual-curren release (ype B) residual curren release Index 1. Generals... 2 2. Applicaion descripion... 3 2.1 Applicaions...3 2.2 Applicaion examples...4 2.3 How does an operae?...6
A Compact Digital Pixel Sensor (DPS) Using 2T-DRAM
 Using 2T-DRAM") J. Low Power Elecron. Appl. 2011, 1, 77-96; doi:10.3390/jlpea1010077 Aricle OPEN ACCESS Journal of Low Power Elecronics and Applicaions ISSN 2079-9268 www.mdpi.com/journal/jlpea A Compac Digial Pixel Sensor
J. Low Power Elecron. Appl. 2011, 1, 77-96; doi:10.3390/jlpea1010077 Aricle OPEN ACCESS Journal of Low Power Elecronics and Applicaions ISSN 2079-9268 www.mdpi.com/journal/jlpea A Compac Digial Pixel Sensor
An off-line multiprocessor real-time scheduling algorithm to reduce static energy consumption
 An off-line muliprocessor real-ime scheduling algorihm o reduce saic energy consumpion Firs Workshop on Highly-Reliable Power-Efficien Embedded Designs Shenzhen, China Vincen Legou, Mahieu Jan, Lauren
An off-line muliprocessor real-ime scheduling algorihm o reduce saic energy consumpion Firs Workshop on Highly-Reliable Power-Efficien Embedded Designs Shenzhen, China Vincen Legou, Mahieu Jan, Lauren
AUTOMATED TECHNIQUES FOR SATELLITE IMAGE SEGMENTATION
 IPR IPT IGU UCI CIG ACG Table of conens Table des maières Auhors index Index des aueurs earch Recherches xi orir AUTOMATD TCHIQU FOR ATLLIT IMAG GMTATIO A. Guarnieri*, A. Veore* *CIRGO (Inerdeparmen Research
IPR IPT IGU UCI CIG ACG Table of conens Table des maières Auhors index Index des aueurs earch Recherches xi orir AUTOMATD TCHIQU FOR ATLLIT IMAG GMTATIO A. Guarnieri*, A. Veore* *CIRGO (Inerdeparmen Research
Transmit Beamforming with Reduced Feedback Information in OFDM Based Wireless Systems
 Transmi Beamforming wih educed Feedback Informaion in OFDM Based Wireless Sysems Seung-Hyeon Yang, Jae-Yun Ko, and Yong-Hwan Lee School of Elecrical Engineering and INMC, Seoul Naional Universiy Kwanak
Transmi Beamforming wih educed Feedback Informaion in OFDM Based Wireless Sysems Seung-Hyeon Yang, Jae-Yun Ko, and Yong-Hwan Lee School of Elecrical Engineering and INMC, Seoul Naional Universiy Kwanak
AN303 APPLICATION NOTE
 AN303 APPLICATION NOTE LATCHING CURRENT INTRODUCTION An imporan problem concerning he uilizaion of componens such as hyrisors or riacs is he holding of he componen in he conducing sae afer he rigger curren
AN303 APPLICATION NOTE LATCHING CURRENT INTRODUCTION An imporan problem concerning he uilizaion of componens such as hyrisors or riacs is he holding of he componen in he conducing sae afer he rigger curren
KALMAN FILTER AND NARX NEURAL NETWORK FOR ROBOT VISION BASED HUMAN TRACKING UDC ( KALMAN), ( ), (007.2)
, ( ), (007.2)") FACTA UNIERITATI eries: Auomaic Conrol and Roboics ol. 2 N o 23 pp. 43-5 KALMAN FILTER AND NARX NEURAL NETWORK FOR ROBOT IION BAED HUMAN TRACKING UDC (4.42KALMAN) (4.32.26) (7.2) Emina Perović Žaro Ćojbašić
FACTA UNIERITATI eries: Auomaic Conrol and Roboics ol. 2 N o 23 pp. 43-5 KALMAN FILTER AND NARX NEURAL NETWORK FOR ROBOT IION BAED HUMAN TRACKING UDC (4.42KALMAN) (4.32.26) (7.2) Emina Perović Žaro Ćojbašić
SPEAKER IDENTIFICATION USING MODULAR RECURRENT NEURAL NETWORKS. M W Mak. The Hong Kong Polytechnic University
 SPEAKER IDENTIFICATION USING MODULAR RECURRENT NEURAL NETWORKS M W Ma The Hong Kong Polyechnic Universiy ABSTRACT This paper demonsraes a speaer idenificaion sysem based on recurren neural newors rained
SPEAKER IDENTIFICATION USING MODULAR RECURRENT NEURAL NETWORKS M W Ma The Hong Kong Polyechnic Universiy ABSTRACT This paper demonsraes a speaer idenificaion sysem based on recurren neural newors rained
Chapter 2 Summary: Continuous-Wave Modulation. Belkacem Derras
 ECEN 44 Communicaion Theory Chaper Summary: Coninuous-Wave Modulaion.1 Modulaion Modulaion is a process in which a parameer of a carrier waveform is varied in accordance wih a given message (baseband)
ECEN 44 Communicaion Theory Chaper Summary: Coninuous-Wave Modulaion.1 Modulaion Modulaion is a process in which a parameer of a carrier waveform is varied in accordance wih a given message (baseband)
Abstract. 1 Introduction
 A Low Sample Rae Real Time Advanced Sonar Ring Saeid Fazli and Lindsay Kleeman ARC Cenre for Percepive and Inelligen Machines in Complex Environmens (PIMCE) Inelligen Roboics Research Cenre(IRRC) Monash
A Low Sample Rae Real Time Advanced Sonar Ring Saeid Fazli and Lindsay Kleeman ARC Cenre for Percepive and Inelligen Machines in Complex Environmens (PIMCE) Inelligen Roboics Research Cenre(IRRC) Monash
4 20mA Interface-IC AM462 for industrial µ-processor applications
 Because of he grea number of indusrial buses now available he majoriy of indusrial measuremen echnology applicaions sill calls for he sandard analog curren nework. The reason for his lies in he fac ha
Because of he grea number of indusrial buses now available he majoriy of indusrial measuremen echnology applicaions sill calls for he sandard analog curren nework. The reason for his lies in he fac ha
Lecture #7: Discrete-time Signals and Sampling
 EEL335: Discree-Time Signals and Sysems Lecure #7: Discree-ime Signals and Sampling. Inroducion Lecure #7: Discree-ime Signals and Sampling Unlike coninuous-ime signals, discree-ime signals have defined
EEL335: Discree-Time Signals and Sysems Lecure #7: Discree-ime Signals and Sampling. Inroducion Lecure #7: Discree-ime Signals and Sampling Unlike coninuous-ime signals, discree-ime signals have defined
Recognition and Tracing Scheme Study of Moving Objects by Video Monitoring System
 www.ijcsi.org 85 Recogniion and Tracing Scheme Sudy of Moving Ojecs y Video Monioring Sysem Peilong XU 1 1 The Growing Base for Sae Key Laoraory, Qingdao Universiy, No. 308, Ningxia Road, Qingdao 266071,
www.ijcsi.org 85 Recogniion and Tracing Scheme Sudy of Moving Ojecs y Video Monioring Sysem Peilong XU 1 1 The Growing Base for Sae Key Laoraory, Qingdao Universiy, No. 308, Ningxia Road, Qingdao 266071,
A New Measurement Method of the Dynamic Contact Resistance of HV Circuit Breakers
 A New Measuremen Mehod of he Dynamic Conac Resisance of HV Circui Breakers M. Landry*, A. Mercier, G. Ouelle, C. Rajoe, J. Caron, M. Roy Hydro-Québec Fouad Brikci Zensol Auomaion Inc. (CANADA) Inroducion
A New Measuremen Mehod of he Dynamic Conac Resisance of HV Circui Breakers M. Landry*, A. Mercier, G. Ouelle, C. Rajoe, J. Caron, M. Roy Hydro-Québec Fouad Brikci Zensol Auomaion Inc. (CANADA) Inroducion