A Multidisciplinary Approach to Cooperative Robotics
|
|
|
- Hubert Welch
- 5 years ago
- Views:
Transcription
1 A Multidisciplinary Approach to Cooperative Pedro U. Lima Intelligent Systems Lab Instituto Superior Técnico Lisbon, Portugal





2 WHERE ARE WE?

3 ISR ASSOCIATE LAB PARTNERS Multidisciplinary R&D in and Information Processing Mobile robotics, intelligent systems, computer and robot vision, biomedical and evolutionary systems, signal processing, ocean robotics and dynamic systems R&D in Marine Sciences Description, experiment and modeling of oceanic ecosystems, within the areas of Ecology, Marine Biology, Physical and Chemical Oceanography, and Fisheries. R&D in Earth and Space Sciences Genesis, evolution and use of mineral resources, from land and the ocean floors, with fluid-rock interaction processes and with Mineralogy and Crystallography and their applications, including environmental management. R&D in Sustainable Technologies and Environmental Systems Sustainability, namely in terms of the needs to secure the quality of the environment, together with the management of energy resources and the economic development.


4 ISR ASSOCIATE LAB PARTNERS Multidisciplinary R&D in and Information Processing Mobile robotics, intelligent systems, computer and robot vision, biomedical and evolutionary systems, signal processing, ocean robotics and dynamic systems R&D in Marine Sciences Description, experiment and modeling of oceanic ecosystems, within the areas of Ecology, Marine Biology, Physical and Chemical Oceanography, and Fisheries. R&D in Earth and Space Sciences Genesis, evolution and use of mineral resources, from land and the ocean floors, with fluid-rock interaction processes and with Mineralogy and Crystallography and their applications, including environmental management. R&D in Sustainable Technologies and Environmental Systems Sustainability, namely in terms of the needs to secure the quality of the environment, together with the management of energy resources and the economic development.








5 ISR ACTIVITIES HIGHLIGHTS applications: land, sea and aerial robots enabling technologies: task planning, guidance, navigation, control, computer vision, image and signal processing, software architectures, multi-robot systems tech transfer: collaboration with Portuguese and foreign companies funding: from participation in several EU, ESA and nationally funded R&D projects
 systems (main focus) cognitive robots human-robot interaction large-scale systems")


6 INTELLIGENT SYSTEMS LAB Driving theme: R&D on decentralized decision-making and control for multi-robot (networked, cooperative) systems (main focus) cognitive robots human-robot interaction large-scale systems Application-driven: e.g., monitoring and decision-making in hazardous/remote environments (e.g., space, contaminated areas, post-disaster scenarios) services (e.g., ambient assisted living, helping people in public spaces, energy consumption in buildings, health care management, water irrigation channels decentralized control) Distinctive feature: we bring together people form Artificial Intelligence Control Theory Pedro Lima, ISR/IST
:")

7 ADJUSTABLE AUTONOMY RAPOSA (FOX): semi-autonomous search robot Consortium project with SME IdMind

8 ADJUSTABLE AUTONOMY Originally tele-operated Some recent novel autonomy features: Tether docking Stairs climbing


9 VISUAL TRACKING Aerial Blimp Tracking a Land Robot LAB
10 VISUAL TRACKING Aerial Blimp Tracking a Land Robot GYM


")
11 VISUAL TRACKING Aerial Blimp Tracking a Land Robot 2x real speed Step response (controller tuning) U trajectory tracking


 3D")
12 VISUAL TRACKING Tracking a Ball in 3D by Moving Omni-Robot (Tajana et al, IROS 2007) 3D shape 2D contour




13 VISUAL TRACKING Tracking a Ball in 3D by Moving Omni-Robot (Tajana et al, SIMPAR 2008) Removing the 1 st similarity term, one can track balls of any color

 and communicate")
14 SENSOR FUSION Tracking a Ball in 3D by Multiple Moving Omni-Robots communicating all particle states throughout the network is not practical, due to limited bandwidth a reduced dimension representation of the posterior distribution is required, but at the same time we want to handle the system nonlinearity Solution: model particle distribution by a Gaussian Mixture Model (GMM) and communicate GMM parameters
15 SENSOR FUSION Particle distribution for the two robots
16 SENSOR FUSION Include robot self-localization uncertainty


17 SENSOR FUSION Estimate GMM parameters by EM-algorithm
18 SENSOR FUSION Communicate GMM parameters to teammate
19 SENSOR FUSION Use GMM parameters to fuse info locally

20 ACTIVE COOPERATIVE PERCEPTION EC FP7 URUS Project Tracking People with Multiple Cameras + Robots (robots actively decide to move to improve accuracy)

21 PLANNING UNDER UNCERTAINTY EC FP7 URUS Project POMDPs map beliefs on events occurrence onto actions (move towards a person, move towards a fire)


22 STATIC + MOBILE SENSOR NETWORKS UPCOMING PROJECTS Sustainable Urban Energy Systems (MIT-Portugal) Large Scale Dynamic Sensing and Actuation Ecosystem (CMU-Portugal)


23 FORMATION CONTROL Formation Feasibility (Paulo Tabuada s PhD Thesis, Jan 2002) systematic framework for studying formation motion feasibility of multiagent systems algebraic conditions that guarantee formation feasibility (i.e., that the specified geometric constraints can be satisfied) given the individual robot kinematics were determined framework also enables to obtain lower dimensional control systems describing the group kinematics while maintaining all formation constraints.
 vehicles are virtually linked to each other by the influence of")
24 FORMATION CONTROL Obstacle Compliant Formation Control (Pedro Fazenda s MSc Thesis, Jan 2008) extended Fiorelli's and Leonard's method of controlling a formation of holonomic vehicles to handle non-holonomic vehicle formations with a given geometry, compliant with nearby obstacles (including those represented by teammates) vehicles are virtually linked to each other by the influence of artificial potentials that asymptotically stabilize the formation and keep all the robots separated by specified distances each vehicle has access to the positions of all its teammates, and senses the obstacles within a limited range of its neighborhood. to avoid falling in local minima of the potential fields, the vehicles will recall the n latest positions of the leader and use this information to move around the obstacle and keep the formation
25 FORMATION CONTROL Formation Decentralized Low-Communication State Estimation (Sónia Marques PhD Thesis, waiting for defense applied to ESA project) each vehicle measures locally 3 distances (3 receiving antennas) to another vehicle and communicates its updated state estimates to yet another vehicle state estimates are considered as observations in the receiving vehicle navigation algorithm is based, at each vehicle, on an EKF for local measurements, and on a Covariance Intersection (CI) algorithm (plus the EKF prediction part) for the observations communicated by its neighbor CI algorithm avoids the possible divergence of the EKF at the receiving vehicle, due to correlations between measurements of the team vehicles Estimation error of each s/c Kalman filter
26 DISCRETE EVENT MODELS OF ROBOTIC TASKS most of the existing robotic task models are not based on formal approaches concern a small number of behaviors are tailored to the task at hand systems-theory-based task design methods for general robotic tasks can enable systematic approach to modeling, analysis and design scaling up to realistic applications analysis of formal properties design from specifications Pedro Lima, ISR/IST
27 DES SUPERVISION USING LOGIC SPECIFICATIONS (Lacerda, Lima, 2008) model for 1 robot + environment several models can be composed controllable events are start_receiving move_to_ball pass start_passing move_to_goal kick_ball unsupervised behavior enables several robots going to the ball or a robot start receiving a pass without a pass being made temporal logic specifications disable those undesired behaviors

28 PETRI NET MODELS FOR COOPERATIVE ROBOTS Pedro Lima, ISR/IST
 action model environment model Pedro Lima,")
29 TASK + ENVIRONMENT MODEL (Costelha, Lima, IROS 2007, AAMAS 2008) task model (2 alternatives) action model environment model Pedro Lima, ISR/IST
30 EXAMPLE IN SOCCER ROBOTS Programmed using Petri nets SYNCHRONIZATION Free Kick (simulated vs real)

31 (Palamara et al, 2008) EXAMPLE IN SOCCER ROBOTS Programmed using Petri nets RELATIONAL BEHAVIOR - PASS
32 DES MODEL VIEWS Levels of Abstraction Untimed Timed Stochastic Timed time associated to events duration stochastic time associated to events FSA Timed FSA STA time associated to transitions/ events duration stochastic time associated to transitions/events duration PN Timed PN SPN Pedro Lima, ISR/IST
33 BIO-INSPIRED SWARM CONTROL (Milutinovič, Lima, IEEE TRO 2006) Stochastic Hybrid Automaton model of large robot populations Each robot has a Hybrid Automaton model, whose input events are stochastic, leading to a Stochastic Hybrid Automaton a) Source 2 Source 1 Source 3 q=2 Population x 1 λ 21 λ 23 b) θ=π/4 x 2 θ=0 θ=-π/4 q=1 λ 12 λ 32 q=3 x 2 x 1 x 1 x 1 Pedro Lima, ISR/IST
34 BIO-INSPIRED SWARM CONTROL Hybrid State (x,q) pdf N discrete states Discrete State q dynamics and associated continuous part Pedro Lima, ISR/IST
35 BIO-INSPIRED SWARM CONTROL Pedro Lima, ISR/IST

36 BIO-INSPIRED SWARM CONTROL L S R 0 km 5 km Pedro Lima, ISR/IST
37 BIO-INSPIRED SWARM CONTROL T=3h, u 1,u 2,,u 3 [0,2] Pedro Lima, ISR/IST
38 ECONOMY INSPIRED INSTITUTIONAL ROBOTICS excludes ad hoc interventions (e.g., breaking legs to implement prohibition ) as institutional devices; broken legs can persist for a while, but cannot accumulate - except if transferred to genetic information ; excludes occasional, fortuitous feasible by the agents or their ancestors; excludes natural ; «Institutions are cumulative sets of persistent artificial modifications made to the environment or to the internal mechanisms of a subset of agents, thought to be functional to the collective order.» (Silva, Ventura, Lima, AAMAS 2008) it is not about specific collective goals or particular circumstances; it is about constitutional aspects of how many agents interact; e.g., at nation level, we can change policies and even the government without changing the constitution;
39 (Silva, Lima, ECAL 2007) INSTITUTIONAL ROBOTICS physical properties drivers must slow down and go left or right BUT... How to choose the appropriate direction not to crash one with the other?
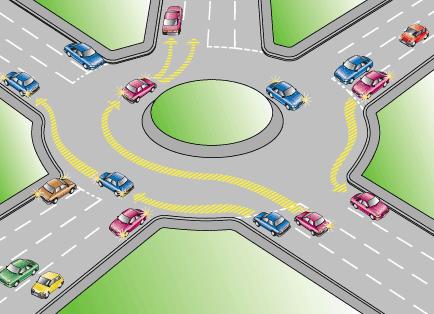






40 INSTITUTIONAL ROBOTICS Portugal, Spain, Germany,... UK, South Africa, New Zealand,... Convention (road code): go right Convention (road code): go left

, meaningful")

41 The roundabout case study INSTITUTIONAL ROBOTICS robots as car drivers in an urban traffic scenario shown basic behaviours: avoiding obstacles, following the wall next: recognize traffic signs, road code rules, social roles (police robots), meaningful material organization of the world (roundabouts) conformists: follow the rules; non-conformists: use utility-based considerations to defy orthodoxy
42 A Multidisciplinary Approach to Cooperative Pedro U. Lima Intelligent Systems Lab Instituto Superior Técnico Lisbon, Portugal
INSTITUTO de SISTEMAS E ROBÓTICA Institute for Systems and Robotics
 - Lisboa INSTITUTO de SISTEMAS E ROBÓTICA Mission and Goals ISR-Lisbon is an RD&I institution, affiliated to the Instituto Superior Técnico (IST), where multidisciplinary advanced research activities are
- Lisboa INSTITUTO de SISTEMAS E ROBÓTICA Mission and Goals ISR-Lisbon is an RD&I institution, affiliated to the Instituto Superior Técnico (IST), where multidisciplinary advanced research activities are
RoboCup. Presented by Shane Murphy April 24, 2003
 RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
FP7 STREP. The. Consortium. Marine Robots and Dexterous Manipulation for Enabling Autonomous Underwater Multipurpose Intervention Missions
 FP7 STREP Marine Robots and Dexterous Manipulation for Enabling Autonomous Underwater Multipurpose Intervention Missions ID 248497 Strategic Objective: ICT 2009 4.2.1 Cognitive Systems, Interaction, Robotics
FP7 STREP Marine Robots and Dexterous Manipulation for Enabling Autonomous Underwater Multipurpose Intervention Missions ID 248497 Strategic Objective: ICT 2009 4.2.1 Cognitive Systems, Interaction, Robotics
Cooperative Robotics in Urban Areas
 Cooperative Robotics in Urban Areas Prof. Alberto Sanfeliu Director Institute of Robotics (IRI) (CSIC-UPC) Technical University of Catalonia December 2, 2008 http://www-iri.upc.es Index Network Robot System
Cooperative Robotics in Urban Areas Prof. Alberto Sanfeliu Director Institute of Robotics (IRI) (CSIC-UPC) Technical University of Catalonia December 2, 2008 http://www-iri.upc.es Index Network Robot System
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition
 Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
NAVIGATION OF MOBILE ROBOTS
 MOBILE ROBOTICS course NAVIGATION OF MOBILE ROBOTS Maria Isabel Ribeiro Pedro Lima mir@isr.ist.utl.pt pal@isr.ist.utl.pt Instituto Superior Técnico (IST) Instituto de Sistemas e Robótica (ISR) Av.Rovisco
MOBILE ROBOTICS course NAVIGATION OF MOBILE ROBOTS Maria Isabel Ribeiro Pedro Lima mir@isr.ist.utl.pt pal@isr.ist.utl.pt Instituto Superior Técnico (IST) Instituto de Sistemas e Robótica (ISR) Av.Rovisco
GPS data correction using encoders and INS sensors
 GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts
 Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
Implicit Fitness Functions for Evolving a Drawing Robot
 Implicit Fitness Functions for Evolving a Drawing Robot Jon Bird, Phil Husbands, Martin Perris, Bill Bigge and Paul Brown Centre for Computational Neuroscience and Robotics University of Sussex, Brighton,
Implicit Fitness Functions for Evolving a Drawing Robot Jon Bird, Phil Husbands, Martin Perris, Bill Bigge and Paul Brown Centre for Computational Neuroscience and Robotics University of Sussex, Brighton,
Overview Agents, environments, typical components
 Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Multi-Robot Coordination. Chapter 11
 Multi-Robot Coordination Chapter 11 Objectives To understand some of the problems being studied with multiple robots To understand the challenges involved with coordinating robots To investigate a simple
Multi-Robot Coordination Chapter 11 Objectives To understand some of the problems being studied with multiple robots To understand the challenges involved with coordinating robots To investigate a simple
S.P.Q.R. Legged Team Report from RoboCup 2003
 S.P.Q.R. Legged Team Report from RoboCup 2003 L. Iocchi and D. Nardi Dipartimento di Informatica e Sistemistica Universitá di Roma La Sapienza Via Salaria 113-00198 Roma, Italy {iocchi,nardi}@dis.uniroma1.it,
S.P.Q.R. Legged Team Report from RoboCup 2003 L. Iocchi and D. Nardi Dipartimento di Informatica e Sistemistica Universitá di Roma La Sapienza Via Salaria 113-00198 Roma, Italy {iocchi,nardi}@dis.uniroma1.it,
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS. Nuno Sousa Eugénio Oliveira
 AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Structure and Synthesis of Robot Motion
 Structure and Synthesis of Robot Motion Motion Synthesis in Groups and Formations I Subramanian Ramamoorthy School of Informatics 5 March 2012 Consider Motion Problems with Many Agents How should we model
Structure and Synthesis of Robot Motion Motion Synthesis in Groups and Formations I Subramanian Ramamoorthy School of Informatics 5 March 2012 Consider Motion Problems with Many Agents How should we model
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Courses on Robotics by Guest Lecturing at Balkan Countries
 Courses on Robotics by Guest Lecturing at Balkan Countries Hans-Dieter Burkhard Humboldt University Berlin With Great Thanks to all participating student teams and their institutes! 1 Courses on Balkan
Courses on Robotics by Guest Lecturing at Balkan Countries Hans-Dieter Burkhard Humboldt University Berlin With Great Thanks to all participating student teams and their institutes! 1 Courses on Balkan
The Autonomous Robots Lab. Kostas Alexis
 The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE
 MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE First Annual 2018 National Mobility Summit of US DOT University Transportation Centers (UTC) April 12, 2018 Washington, DC Research Areas Cooperative
MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE First Annual 2018 National Mobility Summit of US DOT University Transportation Centers (UTC) April 12, 2018 Washington, DC Research Areas Cooperative
GamECAR JULY ULY Meetings. 5 Toward the future. 5 Consortium. E Stay updated
 NEWSLETTER 1 ULY 2017 JULY The project engine has started and there is a long way to go, but we aim at consuming as less gas as possible! It will be a game, but a serious one. Playing it for real, while
NEWSLETTER 1 ULY 2017 JULY The project engine has started and there is a long way to go, but we aim at consuming as less gas as possible! It will be a game, but a serious one. Playing it for real, while
Programmable self-assembly in a thousandrobot
 Programmable self-assembly in a thousandrobot swarm Michael Rubenstein, Alejandro Cornejo, Radhika Nagpal. By- Swapna Joshi 1 st year Ph.D Computing Culture and Society. Authors Michael Rubenstein Assistant
Programmable self-assembly in a thousandrobot swarm Michael Rubenstein, Alejandro Cornejo, Radhika Nagpal. By- Swapna Joshi 1 st year Ph.D Computing Culture and Society. Authors Michael Rubenstein Assistant
Walking and Flying Robots for Challenging Environments
 Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
SPQR RoboCup 2016 Standard Platform League Qualification Report
 SPQR RoboCup 2016 Standard Platform League Qualification Report V. Suriani, F. Riccio, L. Iocchi, D. Nardi Dipartimento di Ingegneria Informatica, Automatica e Gestionale Antonio Ruberti Sapienza Università
SPQR RoboCup 2016 Standard Platform League Qualification Report V. Suriani, F. Riccio, L. Iocchi, D. Nardi Dipartimento di Ingegneria Informatica, Automatica e Gestionale Antonio Ruberti Sapienza Università
CAMBADA 2015: Team Description Paper
 CAMBADA 2015: Team Description Paper B. Cunha, A. J. R. Neves, P. Dias, J. L. Azevedo, N. Lau, R. Dias, F. Amaral, E. Pedrosa, A. Pereira, J. Silva, J. Cunha and A. Trifan Intelligent Robotics and Intelligent
CAMBADA 2015: Team Description Paper B. Cunha, A. J. R. Neves, P. Dias, J. L. Azevedo, N. Lau, R. Dias, F. Amaral, E. Pedrosa, A. Pereira, J. Silva, J. Cunha and A. Trifan Intelligent Robotics and Intelligent
Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics?
 16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
This list supersedes the one published in the November 2002 issue of CR.
 PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Glossary of terms. Short explanation
 Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Journal Title ISSN 5. MIS QUARTERLY BRIEFINGS IN BIOINFORMATICS
 List of Journals with impact factors Date retrieved: 1 August 2009 Journal Title ISSN Impact Factor 5-Year Impact Factor 1. ACM SURVEYS 0360-0300 9.920 14.672 2. VLDB JOURNAL 1066-8888 6.800 9.164 3. IEEE
List of Journals with impact factors Date retrieved: 1 August 2009 Journal Title ISSN Impact Factor 5-Year Impact Factor 1. ACM SURVEYS 0360-0300 9.920 14.672 2. VLDB JOURNAL 1066-8888 6.800 9.164 3. IEEE
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization
 Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS
 AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
AN HYBRID LOCOMOTION SERVICE ROBOT FOR INDOOR SCENARIOS 1
 AN HYBRID LOCOMOTION SERVICE ROBOT FOR INDOOR SCENARIOS 1 Jorge Paiva Luís Tavares João Silva Sequeira Institute for Systems and Robotics Institute for Systems and Robotics Instituto Superior Técnico,
AN HYBRID LOCOMOTION SERVICE ROBOT FOR INDOOR SCENARIOS 1 Jorge Paiva Luís Tavares João Silva Sequeira Institute for Systems and Robotics Institute for Systems and Robotics Instituto Superior Técnico,
Cooperative robot team navigation strategies based on an environmental model
 Cooperative robot team navigation strategies based on an environmental model P. Urcola and L. Montano Instituto de Investigación en Ingeniería de Aragón, University of Zaragoza (Spain) Email: {urcola,
Cooperative robot team navigation strategies based on an environmental model P. Urcola and L. Montano Instituto de Investigación en Ingeniería de Aragón, University of Zaragoza (Spain) Email: {urcola,
Outline. Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types
 Environment types Agent types") Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Collective Robotics. Marcin Pilat
 Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
OFFensive Swarm-Enabled Tactics (OFFSET)
") OFFensive Swarm-Enabled Tactics (OFFSET) Dr. Timothy H. Chung, Program Manager Tactical Technology Office Briefing Prepared for OFFSET Proposers Day 1 Why are Swarms Hard: Complexity of Swarms Number Agent
OFFensive Swarm-Enabled Tactics (OFFSET) Dr. Timothy H. Chung, Program Manager Tactical Technology Office Briefing Prepared for OFFSET Proposers Day 1 Why are Swarms Hard: Complexity of Swarms Number Agent
Uncertainty-Based Localization Solution for Under-Ice Autonomous Underwater Vehicles
 Uncertainty-Based Localization Solution for Under-Ice Autonomous Underwater Vehicles Presenter: Baozhi Chen Baozhi Chen and Dario Pompili Cyber-Physical Systems Lab ECE Department, Rutgers University baozhi_chen@cac.rutgers.edu
Uncertainty-Based Localization Solution for Under-Ice Autonomous Underwater Vehicles Presenter: Baozhi Chen Baozhi Chen and Dario Pompili Cyber-Physical Systems Lab ECE Department, Rutgers University baozhi_chen@cac.rutgers.edu
Research Statement MAXIM LIKHACHEV
 Research Statement MAXIM LIKHACHEV My long-term research goal is to develop a methodology for robust real-time decision-making in autonomous systems. To achieve this goal, my students and I research novel
Research Statement MAXIM LIKHACHEV My long-term research goal is to develop a methodology for robust real-time decision-making in autonomous systems. To achieve this goal, my students and I research novel
SPQR RoboCup 2014 Standard Platform League Team Description Paper
 SPQR RoboCup 2014 Standard Platform League Team Description Paper G. Gemignani, F. Riccio, L. Iocchi, D. Nardi Department of Computer, Control, and Management Engineering Sapienza University of Rome, Italy
SPQR RoboCup 2014 Standard Platform League Team Description Paper G. Gemignani, F. Riccio, L. Iocchi, D. Nardi Department of Computer, Control, and Management Engineering Sapienza University of Rome, Italy
Evolutionary robotics Jørgen Nordmoen
 INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
Challenges for AI: Mobile Robots on Construction Sites. Tim Detert
 Challenges for AI: Mobile Robots on Construction Sites Tim Detert Challenges for AI: Mobile Robots on Construction Sites What will Mobile Robots on Construction Sites be Like? In the future it eventually
Challenges for AI: Mobile Robots on Construction Sites Tim Detert Challenges for AI: Mobile Robots on Construction Sites What will Mobile Robots on Construction Sites be Like? In the future it eventually
CS 599: Distributed Intelligence in Robotics
 CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
Some Signal Processing Techniques for Wireless Cooperative Localization and Tracking
 Some Signal Processing Techniques for Wireless Cooperative Localization and Tracking Hadi Noureddine CominLabs UEB/Supélec Rennes SCEE Supélec seminar February 20, 2014 Acknowledgments This work was performed
Some Signal Processing Techniques for Wireless Cooperative Localization and Tracking Hadi Noureddine CominLabs UEB/Supélec Rennes SCEE Supélec seminar February 20, 2014 Acknowledgments This work was performed
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Hierarchical Controller for Robotic Soccer
 Hierarchical Controller for Robotic Soccer Byron Knoll Cognitive Systems 402 April 13, 2008 ABSTRACT RoboCup is an initiative aimed at advancing Artificial Intelligence (AI) and robotics research. This
Hierarchical Controller for Robotic Soccer Byron Knoll Cognitive Systems 402 April 13, 2008 ABSTRACT RoboCup is an initiative aimed at advancing Artificial Intelligence (AI) and robotics research. This
URUS Ubiquitous Networking Robotics for Urban Settings
 URUS Ubiquitous Networking Robotics for Urban Settings Prof. Alberto Sanfeliu (Coordinator) Instituto de Robótica (IRI) (CSIC-UPC) Technical University of Catalonia May 19th, 2008 http://www-iri-upc.es/groups/lrobots
URUS Ubiquitous Networking Robotics for Urban Settings Prof. Alberto Sanfeliu (Coordinator) Instituto de Robótica (IRI) (CSIC-UPC) Technical University of Catalonia May 19th, 2008 http://www-iri-upc.es/groups/lrobots
Subsumption Architecture in Swarm Robotics. Cuong Nguyen Viet 16/11/2015
 Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Multi robot Team Formation for Distributed Area Coverage. Raj Dasgupta Computer Science Department University of Nebraska, Omaha
 Multi robot Team Formation for Distributed Area Coverage Raj Dasgupta Computer Science Department University of Nebraska, Omaha C MANTIC Lab Collaborative Multi AgeNt/Multi robot Technologies for Intelligent
Multi robot Team Formation for Distributed Area Coverage Raj Dasgupta Computer Science Department University of Nebraska, Omaha C MANTIC Lab Collaborative Multi AgeNt/Multi robot Technologies for Intelligent
Cooperative robots in people guidance mission: DTM model validation and local optimization motion.
 Cooperative robots in people guidance mission: DTM model validation and local optimization motion. Anaís Garrell Alberto Sanfeliu Taipei, Taiwan. 22th October Overview Motivation. Modelling people s motion.
Cooperative robots in people guidance mission: DTM model validation and local optimization motion. Anaís Garrell Alberto Sanfeliu Taipei, Taiwan. 22th October Overview Motivation. Modelling people s motion.
Task Allocation: Role Assignment. Dr. Daisy Tang
 Task Allocation: Role Assignment Dr. Daisy Tang Outline Multi-robot dynamic role assignment Task Allocation Based On Roles Usually, a task is decomposed into roleseither by a general autonomous planner,
Task Allocation: Role Assignment Dr. Daisy Tang Outline Multi-robot dynamic role assignment Task Allocation Based On Roles Usually, a task is decomposed into roleseither by a general autonomous planner,
Planning in autonomous mobile robotics
 Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
Hybrid architectures. IAR Lecture 6 Barbara Webb
 Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Computer Sciences & Engineering Titles
 Bapatla Engineering College :: Library Science Direct e-journals 2016 subscribed by the College Library. Computer Sciences & Engineering - 275 Titles S No ISSN Journal Title Imprint Specialization Subject
Bapatla Engineering College :: Library Science Direct e-journals 2016 subscribed by the College Library. Computer Sciences & Engineering - 275 Titles S No ISSN Journal Title Imprint Specialization Subject
FP7 ICT Call 6: Cognitive Systems and Robotics
 FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
Available theses (October 2011) MERLIN Group
 MERLIN Group") Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Cognitive Robotics 2017/2018
 Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Key Areas for Collaboration
 Planetary Robotics & Autonomy - current and future collaborations with China Dr. Yang Gao Head of AI & Autonomy Group Lecturer in Spacecraft Autonomy Surrey Space Centre University of Surrey, United Kingdom
Planetary Robotics & Autonomy - current and future collaborations with China Dr. Yang Gao Head of AI & Autonomy Group Lecturer in Spacecraft Autonomy Surrey Space Centre University of Surrey, United Kingdom
Learning and Using Models of Kicking Motions for Legged Robots
 Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Recommended Text. Logistics. Course Logistics. Intelligent Robotic Systems
 Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Ali-akbar Agha-mohammadi
 Ali-akbar Agha-mohammadi Parasol lab, Dept. of Computer Science and Engineering, Texas A&M University Dynamics and Control lab, Dept. of Aerospace Engineering, Texas A&M University Statement of Research
Ali-akbar Agha-mohammadi Parasol lab, Dept. of Computer Science and Engineering, Texas A&M University Dynamics and Control lab, Dept. of Aerospace Engineering, Texas A&M University Statement of Research
Paulo Costa, Antonio Moreira, Armando Sousa, Paulo Marques, Pedro Costa, Anibal Matos
 RoboCup-99 Team Descriptions Small Robots League, Team 5dpo, pages 85 89 http: /www.ep.liu.se/ea/cis/1999/006/15/ 85 5dpo Team description 5dpo Paulo Costa, Antonio Moreira, Armando Sousa, Paulo Marques,
RoboCup-99 Team Descriptions Small Robots League, Team 5dpo, pages 85 89 http: /www.ep.liu.se/ea/cis/1999/006/15/ 85 5dpo Team description 5dpo Paulo Costa, Antonio Moreira, Armando Sousa, Paulo Marques,
Underwater Vehicle Systems at IFREMER. From R&D to operational systems. Jan Opderbecke IFREMER Unit for Underwater Systems
 Underwater Vehicle Systems at IFREMER From R&D to operational systems Jan Opderbecke IFREMER Unit for Underwater Systems Operational Engineering Mechanical and systems engineering Marine robotics, mapping,
Underwater Vehicle Systems at IFREMER From R&D to operational systems Jan Opderbecke IFREMER Unit for Underwater Systems Operational Engineering Mechanical and systems engineering Marine robotics, mapping,
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
- Basics of informatics - Computer network - Software engineering - Intelligent media processing - Human interface. Professor. Professor.
 - Basics of informatics - Computer network - Software engineering - Intelligent media processing - Human interface Computer-Aided Engineering Research of power/signal integrity analysis and EMC design
- Basics of informatics - Computer network - Software engineering - Intelligent media processing - Human interface Computer-Aided Engineering Research of power/signal integrity analysis and EMC design
Final Report Non Hit Car And Truck
 Final Report Non Hit Car And Truck 2010-2013 Project within Vehicle and Traffic Safety Author: Anders Almevad Date 2014-03-17 Content 1. Executive summary... 3 2. Background... 3. Objective... 4. Project
Final Report Non Hit Car And Truck 2010-2013 Project within Vehicle and Traffic Safety Author: Anders Almevad Date 2014-03-17 Content 1. Executive summary... 3 2. Background... 3. Objective... 4. Project
Multisensory Based Manipulation Architecture
 Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
CS 730/830: Intro AI. Prof. Wheeler Ruml. TA Bence Cserna. Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1
 CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION
 Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
The safe & productive robot working without fences
 The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The safe & productive robot working without fences Final Presentation, Stuttgart, May 5 th, 2009 Objectives
The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The safe & productive robot working without fences Final Presentation, Stuttgart, May 5 th, 2009 Objectives
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Cooperative Environment Perception in the URUS project Prof. Alberto Sanfeliu
 Cooperative Environment Perception in the URUS project Prof. Alberto Sanfeliu Director Institute of Robotics (IRI) (CSIC-UPC) Technical University of Catalonia May 12th, 2009 http://www-iri.upc.es Index
Cooperative Environment Perception in the URUS project Prof. Alberto Sanfeliu Director Institute of Robotics (IRI) (CSIC-UPC) Technical University of Catalonia May 12th, 2009 http://www-iri.upc.es Index
Intelligent Agents & Search Problem Formulation. AIMA, Chapters 2,
 Intelligent Agents & Search Problem Formulation AIMA, Chapters 2, 3.1-3.2 Outline for today s lecture Intelligent Agents (AIMA 2.1-2) Task Environments Formulating Search Problems CIS 421/521 - Intro to
Intelligent Agents & Search Problem Formulation AIMA, Chapters 2, 3.1-3.2 Outline for today s lecture Intelligent Agents (AIMA 2.1-2) Task Environments Formulating Search Problems CIS 421/521 - Intro to
2. Publishable summary
 2. Publishable summary CogLaboration (Successful real World Human-Robot Collaboration: from the cognition of human-human collaboration to fluent human-robot collaboration) is a specific targeted research
2. Publishable summary CogLaboration (Successful real World Human-Robot Collaboration: from the cognition of human-human collaboration to fluent human-robot collaboration) is a specific targeted research
Agent. Pengju Ren. Institute of Artificial Intelligence and Robotics
 Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
SnakeSIM: a Snake Robot Simulation Framework for Perception-Driven Obstacle-Aided Locomotion
 : a Snake Robot Simulation Framework for Perception-Driven Obstacle-Aided Locomotion Filippo Sanfilippo 1, Øyvind Stavdahl 1 and Pål Liljebäck 1 1 Dept. of Engineering Cybernetics, Norwegian University
: a Snake Robot Simulation Framework for Perception-Driven Obstacle-Aided Locomotion Filippo Sanfilippo 1, Øyvind Stavdahl 1 and Pål Liljebäck 1 1 Dept. of Engineering Cybernetics, Norwegian University
CAMBADA 2014: Team Description Paper
 CAMBADA 2014: Team Description Paper R. Dias, F. Amaral, J. L. Azevedo, R. Castro, B. Cunha, J. Cunha, P. Dias, N. Lau, C. Magalhães, A. J. R. Neves, A. Nunes, E. Pedrosa, A. Pereira, J. Santos, J. Silva,
CAMBADA 2014: Team Description Paper R. Dias, F. Amaral, J. L. Azevedo, R. Castro, B. Cunha, J. Cunha, P. Dias, N. Lau, C. Magalhães, A. J. R. Neves, A. Nunes, E. Pedrosa, A. Pereira, J. Santos, J. Silva,
CS295-1 Final Project : AIBO
 CS295-1 Final Project : AIBO Mert Akdere, Ethan F. Leland December 20, 2005 Abstract This document is the final report for our CS295-1 Sensor Data Management Course Final Project: Project AIBO. The main
CS295-1 Final Project : AIBO Mert Akdere, Ethan F. Leland December 20, 2005 Abstract This document is the final report for our CS295-1 Sensor Data Management Course Final Project: Project AIBO. The main
Cooperative Active Perception using POMDPs
 Cooperative Active Perception using POMDPs Matthijs T.J. Spaan Institute for Systems and Robotics Instituto Superior Técnico Av. Rovisco Pais, 1, 1049-001 Lisbon, Portugal Abstract This paper studies active
Cooperative Active Perception using POMDPs Matthijs T.J. Spaan Institute for Systems and Robotics Instituto Superior Técnico Av. Rovisco Pais, 1, 1049-001 Lisbon, Portugal Abstract This paper studies active
Unit 1: Introduction to Autonomous Robotics
 Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Reinforcement Learning Simulations and Robotics
 Reinforcement Learning Simulations and Robotics Models Partially observable noise in sensors Policy search methods rather than value functionbased approaches Isolate key parameters by choosing an appropriate
Reinforcement Learning Simulations and Robotics Models Partially observable noise in sensors Policy search methods rather than value functionbased approaches Isolate key parameters by choosing an appropriate
Overview of the Carnegie Mellon University Robotics Institute DOE Traineeship in Environmental Management 17493
 Overview of the Carnegie Mellon University Robotics Institute DOE Traineeship in Environmental Management 17493 ABSTRACT Nathan Michael *, William Whittaker *, Martial Hebert * * Carnegie Mellon University
Overview of the Carnegie Mellon University Robotics Institute DOE Traineeship in Environmental Management 17493 ABSTRACT Nathan Michael *, William Whittaker *, Martial Hebert * * Carnegie Mellon University
Modeling Supervisory Control of Autonomous Mobile Robots using Graph Theory, Automata and Z Notation
 Modeling Supervisory Control of Autonomous Mobile Robots using Graph Theory, Automata and Z Notation Javed Iqbal 1, Sher Afzal Khan 2, Nazir Ahmad Zafar 3 and Farooq Ahmad 1 1 Faculty of Information Technology,
Modeling Supervisory Control of Autonomous Mobile Robots using Graph Theory, Automata and Z Notation Javed Iqbal 1, Sher Afzal Khan 2, Nazir Ahmad Zafar 3 and Farooq Ahmad 1 1 Faculty of Information Technology,
Multi-Agent Planning
 25 PRICAI 2000 Workshop on Teams with Adjustable Autonomy PRICAI 2000 Workshop on Teams with Adjustable Autonomy Position Paper Designing an architecture for adjustably autonomous robot teams David Kortenkamp
25 PRICAI 2000 Workshop on Teams with Adjustable Autonomy PRICAI 2000 Workshop on Teams with Adjustable Autonomy Position Paper Designing an architecture for adjustably autonomous robot teams David Kortenkamp
Multi-Platform Soccer Robot Development System
 Multi-Platform Soccer Robot Development System Hui Wang, Han Wang, Chunmiao Wang, William Y. C. Soh Division of Control & Instrumentation, School of EEE Nanyang Technological University Nanyang Avenue,
Multi-Platform Soccer Robot Development System Hui Wang, Han Wang, Chunmiao Wang, William Y. C. Soh Division of Control & Instrumentation, School of EEE Nanyang Technological University Nanyang Avenue,
Automated Testing of Autonomous Driving Assistance Systems
 Automated Testing of Autonomous Driving Assistance Systems Lionel Briand Vector Testing Symposium, Stuttgart, 2018 SnT Centre Top level research in Information & Communication Technologies Created to fuel
Automated Testing of Autonomous Driving Assistance Systems Lionel Briand Vector Testing Symposium, Stuttgart, 2018 SnT Centre Top level research in Information & Communication Technologies Created to fuel
Assessment of Smart Machines and Manufacturing Competence Centre (SMACC) Scientific Advisory Board Site Visit April 2018.
 Scientific Advisory Board Site Visit April 2018.") Assessment of Smart Machines and Manufacturing Competence Centre (SMACC) Scientific Advisory Board Site Visit 25-27 April 2018 Assessment Report 1. Scientific ambition, quality and impact Rating: 3.5 The
Assessment of Smart Machines and Manufacturing Competence Centre (SMACC) Scientific Advisory Board Site Visit 25-27 April 2018 Assessment Report 1. Scientific ambition, quality and impact Rating: 3.5 The
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
PI: Rhoads. ERRoS: Energetic and Reactive Robotic Swarms
 ERRoS: Energetic and Reactive Robotic Swarms 1 1 Introduction and Background As articulated in a recent presentation by the Deputy Assistant Secretary of the Army for Research and Technology, the future
ERRoS: Energetic and Reactive Robotic Swarms 1 1 Introduction and Background As articulated in a recent presentation by the Deputy Assistant Secretary of the Army for Research and Technology, the future
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results
 SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
Available theses (October 2012) MERLIN Group
 MERLIN Group") Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots
 16-782 Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Class Logistics Instructor:
16-782 Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Class Logistics Instructor:
AUTOMATION & ROBOTICS LABORATORY. Faculty of Electronics and Telecommunications University of Engineering and Technology Vietnam National University
 AUTOMATION & ROBOTICS LABORATORY Faculty of Electronics and Telecommunications University of Engineering and Technology Vietnam National University Industrial Robot for Training ED7220 (Korea) SCORBOT
AUTOMATION & ROBOTICS LABORATORY Faculty of Electronics and Telecommunications University of Engineering and Technology Vietnam National University Industrial Robot for Training ED7220 (Korea) SCORBOT
Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations and Exploration Systems
 Walt Truszkowski, Harold L. Hallock, Christopher Rouff, Jay Karlin, James Rash, Mike Hinchey, and Roy Sterritt Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations
Walt Truszkowski, Harold L. Hallock, Christopher Rouff, Jay Karlin, James Rash, Mike Hinchey, and Roy Sterritt Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations