THE PROVISCOUT FIELD TRIALS TENERIFE 2012 INTEGRATED TESTING OF AEROBOT MAPPING, ROVER NAVIGATION AND SCIENCE ASSESSMENT
|
|
|
- Maximilian Hodges
- 6 years ago
- Views:
Transcription

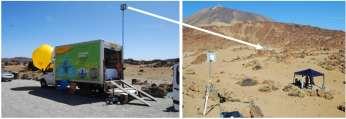
1 THE PROVISCOUT FIELD TRIALS TENERIFE 2012 INTEGRATED TESTING OF AEROBOT MAPPING, ROVER NAVIGATION AND SCIENCE ASSESSMENT Gerhard Paar, Laurence Tyler, Dave Barnes, Mark Woods, Andy Shaw, Konstantinos Kapellos, Tomas Pajdla, Alberto Medina, Derek Pullan, Andrew Griffiths, Jan-Peter Muller, Derek Long and the PRoViScout Team


2 2 FP7-SPACE to Rover Navigation & Science Scout Rover Full Implementation of Rover Control & Autonomy 12 European Partners PRoViScout
3 Planetary Robotics Vision Scouting Chain!!



4 Planetary Robotics Vision Scouting Chain!! Planetary Robotics Vision Monitoring
5 5 Field Trials Objectives: Autonomous Science in Practice Verify technical & strategic concept Test all components in representative field environment Integrate, test & verify component integration with demonstrator platform Provide www interface for remote activities monitoring and visualisation Point out future problems / development needs Validate the proposed operational planning approach for autonomous science. Detect the presence of physical layering (for determination of the sedimentary environment and stratigraphy) Detect the presence of anomalously coloured areas in an outcrop (for determination of compositional variation).




6 6 First integration of Rover Field Trials Rehearsal: Aberystwyth June 2012 Vision system (AUPE, 3D mapping, Panorama, VO) Science assessment Path planning Navigation

7 Field Trials: Permit Acquisition

8 Duration: Key Data Tenerife Field Trials Location: Minas de San José, Tenerife, Spain
9 ~25 Participants First Name Last Name Affiliation Country Role Gerhard Paar JR AT PRoViScout Project Manager / Vision Bernhard Nauschnegg JR AT vision processing SW Kathrin Sander JR AT Support / documentation Andy Shaw SciSys UK Science assessment SW Mark Woods SciSys UK SciSys team leader / SW integration Matt Jordan SciSys UK Overseer Ernst Hauber DLR GER Science / Geology Laetitia Le Deit DLR GER Science / Geology Frank Trauthan DLR GER Science Dave Barnes AU UK AU team leader / Idris Stephen Pugh AU UK Network and infrastructure / AUPE Laurence Tyler AU UK Project science and AUPE / Aerobot Fred Labrosse AU UK Idris supervisor / aerobot / HW Mark Neal AU UK HW / mechanical support Tomas Pajdla CTU CZ Ext. DEM / Ortho / www Michal Jancosek CTU CZ Ext. DEM / Ortho / www Jan Heller CTU CZ Ext. DEM / Ortho / www Alberto Medina GMV ES GNC / navigation Derek Pullan ULeic UK Science / Geology George Manolaros TraSys BE PRoViM / visualization Andrew Griffiths UCL UK Hypercam / WALI Jan-Peter Muller UCL UK UCL team leader / WALI supervisor Derek Long KCL UK Decision System (MMOPS) Conny Spelbrink ActiveConnect S.L. Spain Local Agent Stefano d'orilia REA BE REA Officer Elias Chatzitheodoridis NTUA GR Reviewer
10 Planning / Preparation In 2011 (during PRoVisG Field Trials on Tenerife) trajectory was chosen Several field trials in Aberystwyth In Summer 2012 detailed planning: Contact with local support (ActiveConnect) Permits of National Authorities Booking of accomodation (The Parador, few kms from test site) Equipment Broadband Satellite Application incl. power supply Transportation (most of all Idris) Health and safety instructions for participants Test schedules



11 Daily Schedules from Thu 13th

12 Test Site: Minas de San José ~25m carpark trajectory trail gazebo WiFi

13 System Overview & Components



14 Site Selection, Infrastructure & Logistics see following presentation by Steve Pugh
 Choose (place) relevant scientifical targets/define scientific WPs Set up HW and")
 Integrate all SW components (vision,")
 Idris acts autonomously Results are transferred,")
15 Technical / Scientific Tasks Generate georeferenced overall DEM (handheld & aerobot aerial images) Choose (place) relevant scientifical targets/define scientific WPs Set up HW and NW (Rover, cams, aerobot, WiFi) Test / adopt single SW components (vision, navigation, planning, science assessment, visualization) Integrate all SW components (vision, navigation, planning, science assessment) to the executive & setup on Idris processing unit Set initial DEM & WPs (Overseer ) Idris acts autonomously Results are transferred, stored & visualized

16 Tethered Aerobot Campaign

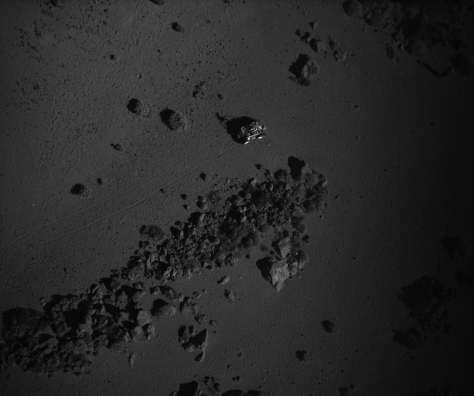
17 Aerobot Images




18 dgps measured points

19 Aerobot Ortho Image & DEM



20 Rover DEM / Ortho Image / Hazard Map Camera FoV too large Too small rocks detected as obstacles Rover position not updated


21 Science Assessment on

22 Press / Dissemination Handouts / mini-posters: English / Spanish / German Placed in hotel / on cars Handed out to tourists & press Log Book (also online) Articles in newspapers: Standard (AT) Kleine Zeitung (AT)

 is transmitted over a satellite link")

23 PRoViScout Live Video Feed Activity in the mission control center (path planning, simulation and monitoring) and in the field (web cam) is transmitted over a satellite link to a server at the CTU And transformed into a live video feed at




24 PRoViScout Live Video Feed, Sun 16 th / Mon 17 th Sept The Live Video Feed Web Page presents the activity of mission overseer, e.g. DEM generation, trajectory planning, scientific target detection, rover 3D visualization and live web cam view.


25 Last Day: Full Chain Navigation /Science Assessment / Decision / Monitoring
26 26 Shortcomings / room for improvement Global waypoint concept missing Provide Broadband Satellite Internet during whole trial period with sufficient upload rate (i.e. for online data processing chains or administrative work on-site) Run more small tests for HW / SW integration before OR extend duration of final field trial Take even more care for HW / rover team to not always being the first AND the last on site Hourly schedule possible not before 3 rd day of trials Talk about coordinate systems early enough!!!

 Distance hotel (Parador) Parking area test site HW")

27 What was very good Every day schedules and communication in general / Climate Local support (MUST have!) Logistics / transfer (amount of cars etc.) Distance hotel (Parador) Parking area test site HW (from beginning) and SW (jointly close to the end) set-up Location of test site (not seen from road not too many tourists)


28 Removing Rover Tracks Low tech Spin-off Technology


29 Further Reading / Watching PRoViScout Youtube PRoViScout Logbook
 under Grant Agreement n 241523")
30 Thank you for your attention The research leading to these results has received funding from the European Community's Seventh Framework Programme (FP7/ ) under Grant Agreement n PRoViScout.
PROJECT FINAL REPORT
 PROJECT FINAL REPORT Grant Agreement number: 241523 Project acronym: PROVISCOUT Project title: Planetary Robotics Vision Scout Funding Scheme: CP Period covered: from 2010-04-01 to 2012-09-30 Name of the
PROJECT FINAL REPORT Grant Agreement number: 241523 Project acronym: PROVISCOUT Project title: Planetary Robotics Vision Scout Funding Scheme: CP Period covered: from 2010-04-01 to 2012-09-30 Name of the
Where on Earth is Aberystwyth??
 Where on Earth is Aberystwyth?? On the coast of Cardigan Bay, West Wales. We have mountains, sea, sky, sand, rocks, lots of interesting weather, and robots for every environment.. Tethered Aerobot Aerobot
Where on Earth is Aberystwyth?? On the coast of Cardigan Bay, West Wales. We have mountains, sea, sky, sand, rocks, lots of interesting weather, and robots for every environment.. Tethered Aerobot Aerobot
Key Areas for Collaboration
 Planetary Robotics & Autonomy - current and future collaborations with China Dr. Yang Gao Head of AI & Autonomy Group Lecturer in Spacecraft Autonomy Surrey Space Centre University of Surrey, United Kingdom
Planetary Robotics & Autonomy - current and future collaborations with China Dr. Yang Gao Head of AI & Autonomy Group Lecturer in Spacecraft Autonomy Surrey Space Centre University of Surrey, United Kingdom
DEMONSTRATING REAL-WORLD COOPERATIVE SYSTEMS USING AEROBOTS
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 DEMONSTRATING REAL-WORLD COOPERATIVE
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 DEMONSTRATING REAL-WORLD COOPERATIVE
ESTEC-CNES ROVER REMOTE EXPERIMENT
 ESTEC-CNES ROVER REMOTE EXPERIMENT Luc Joudrier (1), Angel Munoz Garcia (1), Xavier Rave et al (2) (1) ESA/ESTEC/TEC-MMA (Netherlands), Email: luc.joudrier@esa.int (2) Robotic Group CNES Toulouse (France),
ESTEC-CNES ROVER REMOTE EXPERIMENT Luc Joudrier (1), Angel Munoz Garcia (1), Xavier Rave et al (2) (1) ESA/ESTEC/TEC-MMA (Netherlands), Email: luc.joudrier@esa.int (2) Robotic Group CNES Toulouse (France),
PLANLAB: A Planetary Environment Surface & Subsurface Emulator Facility
 Mem. S.A.It. Vol. 82, 449 c SAIt 2011 Memorie della PLANLAB: A Planetary Environment Surface & Subsurface Emulator Facility R. Trucco, P. Pognant, and S. Drovandi ALTEC Advanced Logistics Technology Engineering
Mem. S.A.It. Vol. 82, 449 c SAIt 2011 Memorie della PLANLAB: A Planetary Environment Surface & Subsurface Emulator Facility R. Trucco, P. Pognant, and S. Drovandi ALTEC Advanced Logistics Technology Engineering
The EDA SUM Project. Surveillance in an Urban environment using Mobile sensors. 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012
 Surveillance in an Urban environment using Mobile sensors 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012 TABLE OF CONTENTS European Defence Agency Supported Project 1. SUM Project Description. 2. Subsystems
Surveillance in an Urban environment using Mobile sensors 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012 TABLE OF CONTENTS European Defence Agency Supported Project 1. SUM Project Description. 2. Subsystems
The Aerospace Industry - an integral part of Innovative Sweden. Aerodays Vienna
 Aeronautics Related R&D Support and Activities in Sweden The Aerospace Industry - an integral part of Innovative Sweden Aerodays Vienna Hans Christer Olson Ministry of Industry, Employment and Communications
Aeronautics Related R&D Support and Activities in Sweden The Aerospace Industry - an integral part of Innovative Sweden Aerodays Vienna Hans Christer Olson Ministry of Industry, Employment and Communications
The Global Positioning System II Field Experiments
 The Global Positioning System II Field Experiments 5-1 Mexico DGPS Field Campaign Cenotes in Tamaulipas, MX, near Aldama 5-2 Are Cenote Water Levels Related? 5-3 DGPS Static Survey of Cenote Water Levels
The Global Positioning System II Field Experiments 5-1 Mexico DGPS Field Campaign Cenotes in Tamaulipas, MX, near Aldama 5-2 Are Cenote Water Levels Related? 5-3 DGPS Static Survey of Cenote Water Levels
Submerged at 1/6 gravity!
 Submerged at 1/6 gravity! MOONWALK Lunar EVA Simulation subsea Marseille Project Moonwalk: Dr. Sarah Jane Pell in the Gandolfi-2 EVA SIM Spacesuit egressing the Lunar Lander Mock-up during the Comex pool
Submerged at 1/6 gravity! MOONWALK Lunar EVA Simulation subsea Marseille Project Moonwalk: Dr. Sarah Jane Pell in the Gandolfi-2 EVA SIM Spacesuit egressing the Lunar Lander Mock-up during the Comex pool
UNITED INTERNET. Business Applications Strategic Partnership with Warburg Pincus. November 8, Investor Presentation November 8, 2016
 UNITED INTERNET Business Applications Strategic Partnership with Warburg Pincus November 8, 2016 1 Investor Presentation November 8, 2016 1&1 INTERNET SE WITHIN UNITED INTERNET GROUP WP XII Venture Holdings
UNITED INTERNET Business Applications Strategic Partnership with Warburg Pincus November 8, 2016 1 Investor Presentation November 8, 2016 1&1 INTERNET SE WITHIN UNITED INTERNET GROUP WP XII Venture Holdings
The Global Positioning Sytem II 10/19/2017
 The Global Positioning System II Field Experiments 10/19/2017 5-1 Mexico DGPS Field Campaign Cenotes in Tamaulipas, MX, near Aldama 10/19/2017 5-2 Are Cenote Water Levels Related? 10/19/2017 5-3 M. Helper,
The Global Positioning System II Field Experiments 10/19/2017 5-1 Mexico DGPS Field Campaign Cenotes in Tamaulipas, MX, near Aldama 10/19/2017 5-2 Are Cenote Water Levels Related? 10/19/2017 5-3 M. Helper,
Square Kilometre Array where Science meets Industry
 Square Kilometre Array where Science meets Industry Nigel Rix, Director of Electronics; ESP KTN Technology Strategy Board The vision of the Technology Strategy Board: UK to be a global leader in innovation
Square Kilometre Array where Science meets Industry Nigel Rix, Director of Electronics; ESP KTN Technology Strategy Board The vision of the Technology Strategy Board: UK to be a global leader in innovation
ROBO-SPECT ROBO-SPECT NEWS. Editorial 1 PROJECT FACTS. In This Issue
 NEWS ROBOtic System with Intelligent Vision and Control for Tunnel Structural INSPECTion and Evaluation Issue 6 September 2016 Editorial Welcome to this 's sixth newsletter. is a European 7th Framework
NEWS ROBOtic System with Intelligent Vision and Control for Tunnel Structural INSPECTion and Evaluation Issue 6 September 2016 Editorial Welcome to this 's sixth newsletter. is a European 7th Framework
X-WALD. Avionic X-band Weather signal modeling and processing validation through real Data acquisition and analysis
 X-WALD Avionic X-band Weather signal modeling and processing validation through real Data acquisition and analysis State of the art Background All civil airplanes and military transport aircrafts are equipped
X-WALD Avionic X-band Weather signal modeling and processing validation through real Data acquisition and analysis State of the art Background All civil airplanes and military transport aircrafts are equipped
9/12/2011. Training Course Remote Sensing Basic Theory & Image Processing Methods September 2011
 Training Course Remote Sensing Basic Theory & Image Processing Methods 19 23 September 2011 Remote Sensing Platforms Michiel Damen (September 2011) damen@itc.nl 1 Overview Platforms & missions aerial surveys
Training Course Remote Sensing Basic Theory & Image Processing Methods 19 23 September 2011 Remote Sensing Platforms Michiel Damen (September 2011) damen@itc.nl 1 Overview Platforms & missions aerial surveys
GNSS MONITORING NETWORKS
 SPACE GNSS MONITORING NETWORKS Satellite communications, earth observation, navigation and positioning and control stations indracompany.com GNSS MONITORING NETWORKS GNSS MONITORING NETWORKS Indra s solutions
SPACE GNSS MONITORING NETWORKS Satellite communications, earth observation, navigation and positioning and control stations indracompany.com GNSS MONITORING NETWORKS GNSS MONITORING NETWORKS Indra s solutions
Unmanned on-orbit servicing (OOS), ROKVISS and the TECSAS mission
, ROKVISS and the TECSAS mission") In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 On-Orbit Servicing (OOS), ROKVISS and
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 On-Orbit Servicing (OOS), ROKVISS and
Status of Active Debris Removal (ADR) developments at the Swiss Space Center
 developments at the Swiss Space Center") Status of Active Debris Removal (ADR) developments at the Swiss Space Center Muriel Richard, Benoit Chamot, Volker Gass, Claude Nicollier muriel.richard@epfl.ch IAF SYMPOSIUM 2013 11 February 2013 Vienna
Status of Active Debris Removal (ADR) developments at the Swiss Space Center Muriel Richard, Benoit Chamot, Volker Gass, Claude Nicollier muriel.richard@epfl.ch IAF SYMPOSIUM 2013 11 February 2013 Vienna
End-to-End Simulation and Verification of Rendezvous and Docking/Berthing Systems using Robotics
 Session 9 Special Test End-to-End Simulation and Verification of Rendezvous and Docking/Berthing Systems using Robotics Author(s): H. Benninghoff, F. Rems, M. Gnat, R. Faller, R. Krenn, M. Stelzer, B.
Session 9 Special Test End-to-End Simulation and Verification of Rendezvous and Docking/Berthing Systems using Robotics Author(s): H. Benninghoff, F. Rems, M. Gnat, R. Faller, R. Krenn, M. Stelzer, B.
The PROBA Missions Design Capabilities for Autonomous Guidance, Navigation and Control. Jean de Lafontaine President
 The PROBA Missions Design Capabilities for Autonomous Guidance, Navigation and Control Jean de Lafontaine President Overview of NGC NGC International Inc (holding company) NGC Aerospace Ltd Sherbrooke,
The PROBA Missions Design Capabilities for Autonomous Guidance, Navigation and Control Jean de Lafontaine President Overview of NGC NGC International Inc (holding company) NGC Aerospace Ltd Sherbrooke,
Civil Applications of Galileo. Brussels, June 12, 2006 Ir. Peter A. Grognard Founder and CEO, Septentrio nv
 Civil Applications of Galileo Brussels, June 12, 2006 Ir. Peter A. Grognard Founder and CEO, Septentrio nv Company overview Founded January 21, 2000 in Leuven, Belgium Spin-off of Interuniversity MicroElectronics
Civil Applications of Galileo Brussels, June 12, 2006 Ir. Peter A. Grognard Founder and CEO, Septentrio nv Company overview Founded January 21, 2000 in Leuven, Belgium Spin-off of Interuniversity MicroElectronics
committed to Europe big & fast data for smart city applications GSMA Smart Cities, Brussels 6 Sept. 2013
 big & fast data for smart city applications GSMA Smart Cities, Brussels 6 Sept. 2013 Nicolas de Cordes VP Marketing Vision, Group Marketing, Orange committed to Europe GSMA Smart Cities, Brussels Sept
big & fast data for smart city applications GSMA Smart Cities, Brussels 6 Sept. 2013 Nicolas de Cordes VP Marketing Vision, Group Marketing, Orange committed to Europe GSMA Smart Cities, Brussels Sept
Ozobot Bit. Computer Science Engineering Program
 3 rd Grade Ozobot Bit Computer Science Engineering Program Post Visit Activity Resources 2018 Winter/Spring 2018 Dear Third Grade Visiting Classroom Teacher, It is hoped that you and your students enjoyed
3 rd Grade Ozobot Bit Computer Science Engineering Program Post Visit Activity Resources 2018 Winter/Spring 2018 Dear Third Grade Visiting Classroom Teacher, It is hoped that you and your students enjoyed
Chapter 3 Data Acquisition in an Urban Environment
 Chapter 3 Data Acquisition in an Urban Environment - One fundamental issue : cost of data 5-10 times of HW, SW, org ware, staff training, maintenance - Another issue : different kinds of data alphanumeric
Chapter 3 Data Acquisition in an Urban Environment - One fundamental issue : cost of data 5-10 times of HW, SW, org ware, staff training, maintenance - Another issue : different kinds of data alphanumeric
Evolution 4.0 Ir. Dr. C.J.M. (Chris) Verhoeven
 Verhoeven") Evolution 4.0 Ir. Dr. C.J.M. (Chris) Verhoeven Associate Professor TU Delft Robotics Institute / Theme leader Swarm Robots TU Delft Space Institute / Theme leader Space Robots TU Delft Faculty of Aerospace
Evolution 4.0 Ir. Dr. C.J.M. (Chris) Verhoeven Associate Professor TU Delft Robotics Institute / Theme leader Swarm Robots TU Delft Space Institute / Theme leader Space Robots TU Delft Faculty of Aerospace
2. Publishable summary
 2. Publishable summary CogLaboration (Successful real World Human-Robot Collaboration: from the cognition of human-human collaboration to fluent human-robot collaboration) is a specific targeted research
2. Publishable summary CogLaboration (Successful real World Human-Robot Collaboration: from the cognition of human-human collaboration to fluent human-robot collaboration) is a specific targeted research
Digital Manufacturing
 Digital Manufacturing High Value Manufacturing Catapult / MTC point of view Harald Egner EU & Research Partnership Manager Nottingham, 30 th November HVM Catapult - History HVM Catapult 7 World class centres
Digital Manufacturing High Value Manufacturing Catapult / MTC point of view Harald Egner EU & Research Partnership Manager Nottingham, 30 th November HVM Catapult - History HVM Catapult 7 World class centres
Status of the European Robotic Arm Project and Other Activities of the Robotics Office of ESA's ISS Programme
 Status of the European Robotic Arm Project and Other Activities of the Robotics Office of ESA's ISS Programme Philippe Schoonejans Head, ERA and Robotic Projects Office ESA directorate of Human Spaceflight
Status of the European Robotic Arm Project and Other Activities of the Robotics Office of ESA's ISS Programme Philippe Schoonejans Head, ERA and Robotic Projects Office ESA directorate of Human Spaceflight
ESA Innovation Triangle Initiative (ITI) Overview of ITI proposals from Spain
 Overview of ITI proposals from Spain") Overview of ITI proposals from Spain Marco Freire, Marco Guglielmi Oct. 29 slide1 Outline of Presentation i Overview of ITI i Statistics on Spanish ITI proposals i Conclusions Oct. 29 slide2 Introduction
Overview of ITI proposals from Spain Marco Freire, Marco Guglielmi Oct. 29 slide1 Outline of Presentation i Overview of ITI i Statistics on Spanish ITI proposals i Conclusions Oct. 29 slide2 Introduction
Research Infrastructure Programme
 Research Infrastructure Programme Humanities Information Day 18 February 2015 Katie Lambert UK National Contact Point Overview What are Research Infrastructures? What did the 2014-2015 WP fund? What has
Research Infrastructure Programme Humanities Information Day 18 February 2015 Katie Lambert UK National Contact Point Overview What are Research Infrastructures? What did the 2014-2015 WP fund? What has
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Logistic Efficiencies And Naval architecture for Wind Installations with Novel Developments
 Logistic Efficiencies And Naval architecture for Wind Installations with Novel Developments Project acronym: LEANWIND Grant agreement n o 614020 Collaborative project Start date: 01 st December 2013 Duration:
Logistic Efficiencies And Naval architecture for Wind Installations with Novel Developments Project acronym: LEANWIND Grant agreement n o 614020 Collaborative project Start date: 01 st December 2013 Duration:
Manufacturing Systems Engineering Key Expertise Theme. astutewales.com
 Manufacturing Systems Engineering Key Expertise Theme astutewales.com Exploit Resources & Connectivity in the Manufacturing Process Improve quality, productivity and sustainability. The Whole Life Cycle
Manufacturing Systems Engineering Key Expertise Theme astutewales.com Exploit Resources & Connectivity in the Manufacturing Process Improve quality, productivity and sustainability. The Whole Life Cycle
RobOps Approaching a Holistic and Unified Interface Service Definition for Future Robotic Spacecraft
 www.dlr.de Chart 1 RobOps Approaching a Holistic and Unified Interface Service Definition for Future Robotic Spacecraft Steffen Jaekel, Bernhard Brunner (1) Christian Laroque, Zoran Pjevic (2) Felix Flentge
www.dlr.de Chart 1 RobOps Approaching a Holistic and Unified Interface Service Definition for Future Robotic Spacecraft Steffen Jaekel, Bernhard Brunner (1) Christian Laroque, Zoran Pjevic (2) Felix Flentge
Jager UAVs to Locate GPS Interference
 JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
Digitalisation oportunities New ERA-Net Cofund Action
 Digitalisation oportunities New ERA-Net Cofund Action Dr. Hans-Jörg Lutzeyer European Commission DG Research and Innovation Horizon 2020 Content Research and Innovation Policy Context ICT-enabled agri-food
Digitalisation oportunities New ERA-Net Cofund Action Dr. Hans-Jörg Lutzeyer European Commission DG Research and Innovation Horizon 2020 Content Research and Innovation Policy Context ICT-enabled agri-food
2013 RockSat-C Preliminary Design Review
 2013 RockSat-C Preliminary Design Review TEC (The Electronics Club) Eastern Shore Community College Melfa, VA Larry Brantley, Andrew Carlton, Chase Riley, Nygel Meece, Robert Williams Date 10/26/2012 Mission
2013 RockSat-C Preliminary Design Review TEC (The Electronics Club) Eastern Shore Community College Melfa, VA Larry Brantley, Andrew Carlton, Chase Riley, Nygel Meece, Robert Williams Date 10/26/2012 Mission
Exploration Systems Research & Technology
 Exploration Systems Research & Technology NASA Institute of Advanced Concepts Fellows Meeting 16 March 2005 Dr. Chris Moore Exploration Systems Mission Directorate NASA Headquarters Nation s Vision for
Exploration Systems Research & Technology NASA Institute of Advanced Concepts Fellows Meeting 16 March 2005 Dr. Chris Moore Exploration Systems Mission Directorate NASA Headquarters Nation s Vision for
FET Flagships in Horizon 2020
 HORIZON 2020 - Future & Emerging Technologies (FET) Paris, 21 st December 2017 FET Flagships in Horizon 2020 Aymard de Touzalin Deputy Head of Unit, Flagships DG Connect, European Commission 1 Horizon
HORIZON 2020 - Future & Emerging Technologies (FET) Paris, 21 st December 2017 FET Flagships in Horizon 2020 Aymard de Touzalin Deputy Head of Unit, Flagships DG Connect, European Commission 1 Horizon
Subsea UK 2014 Developments in ROV Technology
 Subsea UK 2014 Developments in ROV Technology Smarter Technologies Enable Smarter Platforms (ROVs) => Improved Offshore Operations Nick Lawson What does an ROV do? Any ROVs primary function is to provide
Subsea UK 2014 Developments in ROV Technology Smarter Technologies Enable Smarter Platforms (ROVs) => Improved Offshore Operations Nick Lawson What does an ROV do? Any ROVs primary function is to provide
Science & Technology Cooperation Workshop
 Science & Technology Cooperation Workshop co-organised by the European Union Delegation to Thailand and the National Science and Technology Development Agency (NSTDA) Sofitel Bangkok Sukhumvit Hotel 11
Science & Technology Cooperation Workshop co-organised by the European Union Delegation to Thailand and the National Science and Technology Development Agency (NSTDA) Sofitel Bangkok Sukhumvit Hotel 11
EIS - Electronics Instrumentation Systems for Marine Applications
 Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2015 230 - ETSETB - Barcelona School of Telecommunications Engineering 710 - EEL - Department of Electronic Engineering MASTER'S DEGREE
Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2015 230 - ETSETB - Barcelona School of Telecommunications Engineering 710 - EEL - Department of Electronic Engineering MASTER'S DEGREE
Work Programme Fostering the innovation potential of RIs
 Work Programme 2018-2020 Fostering the innovation potential of RIs Philippe Froissard Deputy Head of Unit Research Infrastructures Unit European Commission DG Research & Innovation Disclaimer: The following
Work Programme 2018-2020 Fostering the innovation potential of RIs Philippe Froissard Deputy Head of Unit Research Infrastructures Unit European Commission DG Research & Innovation Disclaimer: The following
Exploring Space with Humans and Robots. Jeffrey A. Hoffman MIT 23 April, 2013
 Exploring Space with Humans and Robots Jeffrey A. Hoffman MIT 23 April, 2013 Complexity, Repair, and Servicing 3 4 Robotic Servicing? 5 Orbital Express - 2007 10 SPHERES: ISS National Laboratory
Exploring Space with Humans and Robots Jeffrey A. Hoffman MIT 23 April, 2013 Complexity, Repair, and Servicing 3 4 Robotic Servicing? 5 Orbital Express - 2007 10 SPHERES: ISS National Laboratory
High Resolution Multi-spectral Imagery
 High Resolution Multi-spectral Imagery Jim Baily, AirAgronomics AIRAGRONOMICS Having been involved in broadacre agriculture until 2000 I perceived a need for a high resolution remote sensing service to
High Resolution Multi-spectral Imagery Jim Baily, AirAgronomics AIRAGRONOMICS Having been involved in broadacre agriculture until 2000 I perceived a need for a high resolution remote sensing service to
Education Programs Synergies
 www.dlr.de Chart 1 > Vortrag > Autor Dokumentname > Datum Education Programs Synergies Dieter Hausamann, DLR Antonios Mouratidis, ESA WGCapD-2 Meeting March 4 6, 2013 Frascati, Italy Our Goals Attract
www.dlr.de Chart 1 > Vortrag > Autor Dokumentname > Datum Education Programs Synergies Dieter Hausamann, DLR Antonios Mouratidis, ESA WGCapD-2 Meeting March 4 6, 2013 Frascati, Italy Our Goals Attract
VALERI - A COLLABORATIVE MOBILE MANIPULATOR FOR AEROSPACE PRODUCTION. CLAWAR 2016, London, UK Fraunhofer IFF Robotersysteme
 VALERI - A COLLABORATIVE MOBILE MANIPULATOR FOR AEROSPACE PRODUCTION CLAWAR 2016, London, UK Fraunhofer IFF Robotersysteme Fraunhofer IFF, Magdeburg 2016 VALERI - A collaborative mobile manipulator for
VALERI - A COLLABORATIVE MOBILE MANIPULATOR FOR AEROSPACE PRODUCTION CLAWAR 2016, London, UK Fraunhofer IFF Robotersysteme Fraunhofer IFF, Magdeburg 2016 VALERI - A collaborative mobile manipulator for
A FAMILY OF SOLUTIONS BASED ON THE srx-10, A SW DEFINED MULTICONSTELLATION GNSS RECEIVER
 ION GNSS+ 2014, Session A5 A FAMILY OF SOLUTIONS BASED ON THE srx-10, A SW DEFINED MULTICONSTELLATION GNSS RECEIVER Teresa Ferreira, Manuel Toledo, José María López, GMV Property of GMV All rights reserved
ION GNSS+ 2014, Session A5 A FAMILY OF SOLUTIONS BASED ON THE srx-10, A SW DEFINED MULTICONSTELLATION GNSS RECEIVER Teresa Ferreira, Manuel Toledo, José María López, GMV Property of GMV All rights reserved
AIMS Radar Specifications
 Transmitted Frequency: Peak Radiated Power: Average Power: Antenna Beamwidth: 9.23 GHz 1 Watt (Optional 2 to 80 Watts) 6.25 microwatts up to 0.4 watts; < 1 milliwatt for most applications Fast-Scan (rotating):
Transmitted Frequency: Peak Radiated Power: Average Power: Antenna Beamwidth: 9.23 GHz 1 Watt (Optional 2 to 80 Watts) 6.25 microwatts up to 0.4 watts; < 1 milliwatt for most applications Fast-Scan (rotating):
AN INVESTIGATION INTO SALIENCY-BASED MARS ROI DETECTION
 AN INVESTIGATION INTO SALIENCY-BASED MARS ROI DETECTION Lilan Pan and Dave Barnes Department of Computer Science, Aberystwyth University, UK ABSTRACT This paper reviews several bottom-up saliency algorithms.
AN INVESTIGATION INTO SALIENCY-BASED MARS ROI DETECTION Lilan Pan and Dave Barnes Department of Computer Science, Aberystwyth University, UK ABSTRACT This paper reviews several bottom-up saliency algorithms.
The Global Exploration Roadmap International Space Exploration Coordination Group (ISECG)
") The Global Exploration Roadmap International Space Exploration Coordination Group (ISECG) Kathy Laurini NASA/Senior Advisor, Exploration & Space Ops Co-Chair/ISECG Exp. Roadmap Working Group FISO Telecon,
The Global Exploration Roadmap International Space Exploration Coordination Group (ISECG) Kathy Laurini NASA/Senior Advisor, Exploration & Space Ops Co-Chair/ISECG Exp. Roadmap Working Group FISO Telecon,
TOWARD AN INTEGRATED NATIONAL SURFACE OBSERVING NETWORK MALAYSIAN METEOROLOGICAL DEPARTMENT. Nik Mohd Riduan Nik Osman
 TOWARD AN INTEGRATED NATIONAL SURFACE OBSERVING NETWORK MALAYSIAN METEOROLOGICAL DEPARTMENT By Nik Mohd Riduan Nik Osman Malaysian Meteorological Department, Jalan Sultan, 46667 Petaling Jaya, Selangor,
TOWARD AN INTEGRATED NATIONAL SURFACE OBSERVING NETWORK MALAYSIAN METEOROLOGICAL DEPARTMENT By Nik Mohd Riduan Nik Osman Malaysian Meteorological Department, Jalan Sultan, 46667 Petaling Jaya, Selangor,
Technical Specifications Document. for. Satellite-Based Augmentation System (SBAS) Testbed
 Testbed") Technical Specifications Document for Satellite-Based Augmentation System (SBAS) Testbed Revision 3 13 June 2017 Table of Contents Acronym Definitions... 3 1. Introduction... 4 2. SBAS Testbed Realisation...
Technical Specifications Document for Satellite-Based Augmentation System (SBAS) Testbed Revision 3 13 June 2017 Table of Contents Acronym Definitions... 3 1. Introduction... 4 2. SBAS Testbed Realisation...
Software Computer Vision - Driver Assistance
 Software Computer Vision - Driver Assistance Work @Bosch for developing desktop, web or embedded software and algorithms / computer vision / artificial intelligence for Driver Assistance Systems and Automated
Software Computer Vision - Driver Assistance Work @Bosch for developing desktop, web or embedded software and algorithms / computer vision / artificial intelligence for Driver Assistance Systems and Automated
Canadian Space Robotic Technologies for Lunar Exploration
 Canadian Space Robotic Technologies for Lunar Exploration Nadeem Ghafoor Christian Sallaberger MDA International Lunar Conference Toronto, 19th-23rd September, 2005 Overview Space Robotics in Canada -
Canadian Space Robotic Technologies for Lunar Exploration Nadeem Ghafoor Christian Sallaberger MDA International Lunar Conference Toronto, 19th-23rd September, 2005 Overview Space Robotics in Canada -
Introduction to Galileo PRS
 Introduction to Galileo PRS Fabio Covello 20/09/2017 ESA UNCLASSIFIED - For Official Use Galileo mission figures The Galileo Space Segment: 30 satellites (full constellation) Walker 24/3/1 constellation
Introduction to Galileo PRS Fabio Covello 20/09/2017 ESA UNCLASSIFIED - For Official Use Galileo mission figures The Galileo Space Segment: 30 satellites (full constellation) Walker 24/3/1 constellation
KNOWLEDGE ASSOCIATES INTERNATIONAL
 KNOWLEDGE ASSOCIATES INTERNATIONAL ST JOHN S INNOVATION CENTRE, CAMBRIDGE, UK EUROPE. ASIA. USA. RUSSIA MOVING FORWARD WITH GLOBAL KNOWLEDGE SOUTH AFRICAN KNOWLEDGE MANAGEMENT SUMMIT, SANDTON, 30 th August
KNOWLEDGE ASSOCIATES INTERNATIONAL ST JOHN S INNOVATION CENTRE, CAMBRIDGE, UK EUROPE. ASIA. USA. RUSSIA MOVING FORWARD WITH GLOBAL KNOWLEDGE SOUTH AFRICAN KNOWLEDGE MANAGEMENT SUMMIT, SANDTON, 30 th August
International Research Collaboration. - Why do it?
 Madrid, 25 May 2011 International Research Collaboration - Why do it? Collaboration is increasing 1996 From: Knowledge, Networks and nations; Royal Society 2011 Collaboration is increasing 2008 China has
Madrid, 25 May 2011 International Research Collaboration - Why do it? Collaboration is increasing 1996 From: Knowledge, Networks and nations; Royal Society 2011 Collaboration is increasing 2008 China has
第 XVII 部 災害時における情報通信基盤の開発
 XVII W I D E P R O J E C T 17 1 LifeLine Station (LLS) WG LifeLine Station (LLS) WG was launched in 2008 aiming for designing and developing an architecture of an information package for post-disaster
XVII W I D E P R O J E C T 17 1 LifeLine Station (LLS) WG LifeLine Station (LLS) WG was launched in 2008 aiming for designing and developing an architecture of an information package for post-disaster
Application of Artificial Neural Networks in Autonomous Mission Planning for Planetary Rovers
 Application of Artificial Neural Networks in Autonomous Mission Planning for Planetary Rovers 1 Institute of Deep Space Exploration Technology, School of Aerospace Engineering, Beijing Institute of Technology,
Application of Artificial Neural Networks in Autonomous Mission Planning for Planetary Rovers 1 Institute of Deep Space Exploration Technology, School of Aerospace Engineering, Beijing Institute of Technology,
April 2015 newsletter. Efficient Energy Planning #3
 STEEP (Systems Thinking for Efficient Energy Planning) is an innovative European project delivered in a partnership between the three cities of San Sebastian (Spain), Bristol (UK) and Florence (Italy).
STEEP (Systems Thinking for Efficient Energy Planning) is an innovative European project delivered in a partnership between the three cities of San Sebastian (Spain), Bristol (UK) and Florence (Italy).
CMRE La Spezia, Italy
 Innovative Interoperable M&S within Extended Maritime Domain for Critical Infrastructure Protection and C-IED CMRE La Spezia, Italy Agostino G. Bruzzone 1,2, Alberto Tremori 1 1 NATO STO CMRE& 2 Genoa
Innovative Interoperable M&S within Extended Maritime Domain for Critical Infrastructure Protection and C-IED CMRE La Spezia, Italy Agostino G. Bruzzone 1,2, Alberto Tremori 1 1 NATO STO CMRE& 2 Genoa
Automation & Robotics (A&R) for Space Applications in the German Space Program
 for Space Applications in the German Space Program") B. Sommer, RD-RR 1 Automation & Robotics (A&R) for Space Applications in the German Space Program ASTRA 2002 ESTEC, November 2002 1 2 Current and future application areas Unmanned exploration of the cold
B. Sommer, RD-RR 1 Automation & Robotics (A&R) for Space Applications in the German Space Program ASTRA 2002 ESTEC, November 2002 1 2 Current and future application areas Unmanned exploration of the cold
Intelligent Buildings Remote Monitoring Using PI System at the VSB - Technical University of Ostrava Jan Vanus
 Intelligent Buildings Remote Monitoring Using PI System at the VSB - Technical University of Ostrava Jan Vanus 1 Presentation Agenda: About VŠB TU Ostrava OSIsoft and Intelligent Building monitoring how
Intelligent Buildings Remote Monitoring Using PI System at the VSB - Technical University of Ostrava Jan Vanus 1 Presentation Agenda: About VŠB TU Ostrava OSIsoft and Intelligent Building monitoring how
Helping Build Your Capacity in Nautical Charting & Hydrography
 Helping Build Your Capacity in Nautical Charting & Hydrography Helping Chart your World Rajesh Alla Riyadh, Kingdom of Saudi Arabia 04-06 March 2013 Company Background Marine Services Capacity Building
Helping Build Your Capacity in Nautical Charting & Hydrography Helping Chart your World Rajesh Alla Riyadh, Kingdom of Saudi Arabia 04-06 March 2013 Company Background Marine Services Capacity Building
Information Society Technologies in the 6th Framework Programme. Tom Bo Clausen Project Officer European Commission, IST programme Embedded Systems
 Information Society Technologies in the 6th Framework Programme Tom Bo Clausen Project Officer European Commission, IST programme Embedded Systems Outline of presentation What is a Framework Programme?
Information Society Technologies in the 6th Framework Programme Tom Bo Clausen Project Officer European Commission, IST programme Embedded Systems Outline of presentation What is a Framework Programme?
Prof. Subramanian Ramamoorthy. The University of Edinburgh, Reader at the School of Informatics
 Prof. Subramanian Ramamoorthy The University of Edinburgh, Reader at the School of Informatics with Baxter there is a good simulator, a physical robot and easy to access public libraries means it s relatively
Prof. Subramanian Ramamoorthy The University of Edinburgh, Reader at the School of Informatics with Baxter there is a good simulator, a physical robot and easy to access public libraries means it s relatively
Produsys. Project outline. Machinery and Production Systems. Advanced research based european products for the global market
 Produsys Machinery and Production Systems Advanced research based european products for the global market Project outline 12 Executive Summary Machinery and Production Systems (MPSs) are medium high-tech
Produsys Machinery and Production Systems Advanced research based european products for the global market Project outline 12 Executive Summary Machinery and Production Systems (MPSs) are medium high-tech
Update on enhanced satellite navigation services empowering innovative solutions in Smart Mobility
 Update on enhanced satellite navigation services empowering innovative solutions in Smart Mobility 8th June 2018- Technical session 1 Latest developments in innovative ITS activities Alberto Fernández
Update on enhanced satellite navigation services empowering innovative solutions in Smart Mobility 8th June 2018- Technical session 1 Latest developments in innovative ITS activities Alberto Fernández
THE INNOVATION COMPANY DIGITAL. Institute for Information and Communication Technologies
 THE INNOVATION COMPANY DIGITAL Institute for Information and Communication Technologies The future is DIGITAL! Sensing, analysing and networking in the digital world that s the passion that drives our
THE INNOVATION COMPANY DIGITAL Institute for Information and Communication Technologies The future is DIGITAL! Sensing, analysing and networking in the digital world that s the passion that drives our
Cross-layer model-based framework for multi-objective design of Reconfigurable systems in uncertain hybrid environments
 SmartCPS-concertation Event Brussels, 30 th Jan. 2017 Cross-layer model-based framework for multi-objective design of Reconfigurable systems in uncertain hybrid environments SRC: Sensors 2015, 15(4), 7172-7205;
SmartCPS-concertation Event Brussels, 30 th Jan. 2017 Cross-layer model-based framework for multi-objective design of Reconfigurable systems in uncertain hybrid environments SRC: Sensors 2015, 15(4), 7172-7205;
SPACE EXPLORATION AS A DRIVER FOR GROWTH ESA INITIATIVE TO PARTNER WITH PRIVATE SECTOR
 SPACE EXPLORATION AS A DRIVER FOR GROWTH ESA INITIATIVE TO PARTNER WITH PRIVATE SECTOR BERNHARD HUFENBACH Head of Strategic Planning and Outreach Office, Directorate of Human Spaceflight and Robotic Exploration
SPACE EXPLORATION AS A DRIVER FOR GROWTH ESA INITIATIVE TO PARTNER WITH PRIVATE SECTOR BERNHARD HUFENBACH Head of Strategic Planning and Outreach Office, Directorate of Human Spaceflight and Robotic Exploration
Grant agreement for: RESEARCH FOR THE BENEFIT OF SMEs
 Grant agreement for: RESEARCH FOR THE BENEFIT OF SMEs D5.2 R e p o r t o n D i s s e m i n a t i o n A c t i v i t i e s V e r s i o n 1 D i s s e m i n a t i o n L e v e l : P u b l i c Project acronym:
Grant agreement for: RESEARCH FOR THE BENEFIT OF SMEs D5.2 R e p o r t o n D i s s e m i n a t i o n A c t i v i t i e s V e r s i o n 1 D i s s e m i n a t i o n L e v e l : P u b l i c Project acronym:
Floating offshore wind turbine design stage summary in LIFES50+ project
 Floating offshore wind turbine design stage summary in LIFES50+ project Germán Pérez (TECNALIA) DeepWind 2018 Trondheim, 18 January 2018 Qualification of innovative floating substructures for 10MW wind
Floating offshore wind turbine design stage summary in LIFES50+ project Germán Pérez (TECNALIA) DeepWind 2018 Trondheim, 18 January 2018 Qualification of innovative floating substructures for 10MW wind
ESA Technology Programmes: Spanish Participation in TRP and GSTP
 ESA Technology Programmes: Spanish Participation in TRP and GSTP U. Becker E.Kircher J. Amador Technology Programmes Office ESA/CDTI Technology Development: Opportunities and Challenges Information Meeting
ESA Technology Programmes: Spanish Participation in TRP and GSTP U. Becker E.Kircher J. Amador Technology Programmes Office ESA/CDTI Technology Development: Opportunities and Challenges Information Meeting
STEM Resources. Activities/Competitions (Please check the closing dates) Beat the Flood
 Beat the Flood") STEM Resources Activities/Competitions (Please check the closing dates) Competition / KS1 KS2 KS3 KS4 KS5 In-school Ambassador support Further details Into Film: Into Space British Science Week Packs (from
STEM Resources Activities/Competitions (Please check the closing dates) Competition / KS1 KS2 KS3 KS4 KS5 In-school Ambassador support Further details Into Film: Into Space British Science Week Packs (from
SATELLITE MONITORING OF REMOTE PV-SYSTEMS
 SATELLITE MONITORING OF REMOTE PV-SYSTEMS Stefan Krauter, Thomas Depping UFRJ-COPPE-EE, PV-Labs, C. P. 68504, Rio de Janeiro 21945-970 RJ, BRAZIL Tel: +55-21-2562-8032, Fax: +55-21-22906626, E-mail: krauter@coe.ufrj.br
SATELLITE MONITORING OF REMOTE PV-SYSTEMS Stefan Krauter, Thomas Depping UFRJ-COPPE-EE, PV-Labs, C. P. 68504, Rio de Janeiro 21945-970 RJ, BRAZIL Tel: +55-21-2562-8032, Fax: +55-21-22906626, E-mail: krauter@coe.ufrj.br
Intelligent Cooperative Sensing for Improved traffic efficiency
 Intelligent Cooperative Sensing for Improved traffic efficiency Kick Off Meeting Faculty of Traffic and Transport Sciences, University of Zagreb Nov 30, 2012 - Zagreb Collaborative Project: ICSI Intelligent
Intelligent Cooperative Sensing for Improved traffic efficiency Kick Off Meeting Faculty of Traffic and Transport Sciences, University of Zagreb Nov 30, 2012 - Zagreb Collaborative Project: ICSI Intelligent
C. R. Weisbin, R. Easter, G. Rodriguez January 2001
 on Solar System Bodies --Abstract of a Projected Comparative Performance Evaluation Study-- C. R. Weisbin, R. Easter, G. Rodriguez January 2001 Long Range Vision of Surface Scenarios Technology Now 5 Yrs
on Solar System Bodies --Abstract of a Projected Comparative Performance Evaluation Study-- C. R. Weisbin, R. Easter, G. Rodriguez January 2001 Long Range Vision of Surface Scenarios Technology Now 5 Yrs
we can do together what you can t do alone Company Profile
 we can do together what you can t do alone Company Profile profile TRANS-TECH (TRANSFERRINGTECHNOLOGIES) IS AN ITALIAN INNOVATIVE START-UP COMPANY BORN FROM THE VISION OF ITS FOUNDERS AND FROM THEIR 30-
we can do together what you can t do alone Company Profile profile TRANS-TECH (TRANSFERRINGTECHNOLOGIES) IS AN ITALIAN INNOVATIVE START-UP COMPANY BORN FROM THE VISION OF ITS FOUNDERS AND FROM THEIR 30-
Geo-Monitoring By High-Resolution Optical Sensors
 1 Geo-Monitoring By High-Resolution Optical Sensors Andreas WAGNER, Efstratios STYLIANIDIS, Konstantinos SMAGAS, Jiri TRDLICKA, Gerhard PAAR, Ben HUBER, Christoph REITH, Alexander REITERER Abstract In
1 Geo-Monitoring By High-Resolution Optical Sensors Andreas WAGNER, Efstratios STYLIANIDIS, Konstantinos SMAGAS, Jiri TRDLICKA, Gerhard PAAR, Ben HUBER, Christoph REITH, Alexander REITERER Abstract In
IMPLEMENTATION OF AN SBAS-SACCSA TEST BED IN THE CAR/SAM REGIONS. (Presented by the Secretariat) SUMMARY
 SUMMARY") RLA/03/902 RCC/9 - WP/10 12/06/13 International Civil Aviation Organization South American Regional Office - Project RLA/03/902 Transition to GNSS/SBAS in the CAR/SAM Regions SACCSA Phase III Ninth Meeting
RLA/03/902 RCC/9 - WP/10 12/06/13 International Civil Aviation Organization South American Regional Office - Project RLA/03/902 Transition to GNSS/SBAS in the CAR/SAM Regions SACCSA Phase III Ninth Meeting
International Space Exploration Coordination Group Science White Paper Space Studies Board 2015 Fall Meeting 4 November 2015
 International Space Exploration Coordination Group Science White Paper Space Studies Board 2015 Fall Meeting 4 November 2015 Greg Schmidt (SSERVI), Ben Bussey (NASA), Jean-Claude Worms (ESF), François
International Space Exploration Coordination Group Science White Paper Space Studies Board 2015 Fall Meeting 4 November 2015 Greg Schmidt (SSERVI), Ben Bussey (NASA), Jean-Claude Worms (ESF), François
Introduction. CELIA ROMM University of Wollongong. FAY SUDWEEKS University of Sydney
 CHAPTER 1 Introduction CELIA ROMM University of Wollongong FAY SUDWEEKS University of Sydney The emergence of electronic commerce as a distinct area in business is seen by many researchers and executives
CHAPTER 1 Introduction CELIA ROMM University of Wollongong FAY SUDWEEKS University of Sydney The emergence of electronic commerce as a distinct area in business is seen by many researchers and executives
SONOBOT AUTONOMOUS HYDROGRAPHIC SURVEY VEHICLE PRODUCT INFORMATION GUIDE
 SONOBOT AUTONOMOUS HYDROGRAPHIC SURVEY VEHICLE PRODUCT INFORMATION GUIDE EvoLogics SONOBOT: Autonomous Surface Vehicle for Hydrographic Surveys High Precision Differential GPS for high-accuracy cartography
SONOBOT AUTONOMOUS HYDROGRAPHIC SURVEY VEHICLE PRODUCT INFORMATION GUIDE EvoLogics SONOBOT: Autonomous Surface Vehicle for Hydrographic Surveys High Precision Differential GPS for high-accuracy cartography
SECTEUR Ascertaining user needs
 Ascertaining user needs Marta Bruno Soares (Uni Leeds), Maria Noguer (IEA), Nigel Arnell (Uni Reading), Jorge Paz (Tecnalia) and Amanda Hall (Telespazio VEGA UK) What is? «The Sector Engagement for the
Ascertaining user needs Marta Bruno Soares (Uni Leeds), Maria Noguer (IEA), Nigel Arnell (Uni Reading), Jorge Paz (Tecnalia) and Amanda Hall (Telespazio VEGA UK) What is? «The Sector Engagement for the
Founder. SeeFront founder and CEO Christoph Grossmann at CeBIT 2010 Next Level 3D. SeeFront
 Founder SeeFront founder and CEO Christoph Grossmann at CeBIT 2010 Next Level 3D SeeFront 2010-2012 Track record and milestones 1995 Christoph Grossmann files his first 3D patent application, German patent
Founder SeeFront founder and CEO Christoph Grossmann at CeBIT 2010 Next Level 3D SeeFront 2010-2012 Track record and milestones 1995 Christoph Grossmann files his first 3D patent application, German patent
Research Article Fast Comparison of High-Precision Time Scales Using GNSS Receivers
 Hindawi International Navigation and Observation Volume 2017, Article ID 9176174, 4 pages https://doi.org/10.1155/2017/9176174 Research Article Fast Comparison of High-Precision Time Scales Using Receivers
Hindawi International Navigation and Observation Volume 2017, Article ID 9176174, 4 pages https://doi.org/10.1155/2017/9176174 Research Article Fast Comparison of High-Precision Time Scales Using Receivers
1 ABSTRACT. Proceedings REAL CORP 2012 Tagungsband May 2012, Schwechat.
 Oihana Otaegui, Estíbaliz Loyo, Eduardo Carrasco, Caludia Fösleitner, John Spiller, Daniela Patti, Adela, Marcoci, Rafael Olmedo, Markus Dubielzig 1 ABSTRACT (Oihana Otaegui, Vicomtech-IK4, San Sebastian,
Oihana Otaegui, Estíbaliz Loyo, Eduardo Carrasco, Caludia Fösleitner, John Spiller, Daniela Patti, Adela, Marcoci, Rafael Olmedo, Markus Dubielzig 1 ABSTRACT (Oihana Otaegui, Vicomtech-IK4, San Sebastian,
MRC Health and Biomedical Informatics Research Strategy
 MRC Health and Biomedical Informatics Research Strategy NHS-HE Forum 25th May 2016 Rhoswyn Walker Head of Informatics Research Medical Research in the Big Data Era Vast amount of biomedical and population
MRC Health and Biomedical Informatics Research Strategy NHS-HE Forum 25th May 2016 Rhoswyn Walker Head of Informatics Research Medical Research in the Big Data Era Vast amount of biomedical and population
SPARC. Connect Innova,ons to Markets THE ROBOTICS PPP. DGE, Paris, 23 June Chris Bourillon Secretary General eurobo5cs
 Connect Innova,ons to Markets THE ROBOTICS PPP Chris Bourillon Secretary General eurobo5cs DGE, Paris, 23 June 2015 SPARC The$Partnership$for$ Robo1cs$in$Europe SPARC, the Robo-cs PPP Why a PPP for Robo,cs?
Connect Innova,ons to Markets THE ROBOTICS PPP Chris Bourillon Secretary General eurobo5cs DGE, Paris, 23 June 2015 SPARC The$Partnership$for$ Robo1cs$in$Europe SPARC, the Robo-cs PPP Why a PPP for Robo,cs?
Team Project: A Surveillant Robot System
 Team Project: A Surveillant Robot System SW & HW Test Plan Little Red Team Chankyu Park (Michel) Seonah Lee (Sarah) Qingyuan Shi (Lisa) Chengzhou Li JunMei Li Kai Lin Software Lists SW Lists for Surveillant
Team Project: A Surveillant Robot System SW & HW Test Plan Little Red Team Chankyu Park (Michel) Seonah Lee (Sarah) Qingyuan Shi (Lisa) Chengzhou Li JunMei Li Kai Lin Software Lists SW Lists for Surveillant
Space for Europe: A collection of case studies
 Space for Europe: A collection of case studies Introduction Klaus Becher Knowledge & Analysis LLP 1 26/10/2009 Space as a Problem Solver Practical benefits from investments in space technology Cost-saving
Space for Europe: A collection of case studies Introduction Klaus Becher Knowledge & Analysis LLP 1 26/10/2009 Space as a Problem Solver Practical benefits from investments in space technology Cost-saving
FP7 ICT Work Programme
 FP7 ICT Work Programme 2011-12 Focus on ICT Call 8 and PPP Calls Alessandro Barbagli European Commission Head of Sector - ICT Operations Roma 9 September 2011 Disclaimer: The aim of this presentation is
FP7 ICT Work Programme 2011-12 Focus on ICT Call 8 and PPP Calls Alessandro Barbagli European Commission Head of Sector - ICT Operations Roma 9 September 2011 Disclaimer: The aim of this presentation is
European GNSS Applications in H2020
 European GNSS Applications in H2020 Countdown to H2020 12.12.2013, Brussels Carmen Aguilera European GNSS Agency Agenda European GNSS Agency EU-GNSS market potential FP7- experience and results H2020 opportunities
European GNSS Applications in H2020 Countdown to H2020 12.12.2013, Brussels Carmen Aguilera European GNSS Agency Agenda European GNSS Agency EU-GNSS market potential FP7- experience and results H2020 opportunities
Advanced Impacts evaluation Methodology for innovative freight transport Solutions
 Advanced Impacts evaluation Methodology for innovative freight transport Solutions AIMS 3rd Newsletter August 2010 About AIMS The project AIMS is a co-ordination and support action under the 7th Framework
Advanced Impacts evaluation Methodology for innovative freight transport Solutions AIMS 3rd Newsletter August 2010 About AIMS The project AIMS is a co-ordination and support action under the 7th Framework
EMERGING TRENDS IN TECHNOLOGY THAT ARE CHANGING THE AVIATION WORLD
 EMERGING TRENDS IN TECHNOLOGY THAT ARE CHANGING THE AVIATION WORLD A PRESENTATION BY BABATUNDE FAGBEMI MD SPRINGFOUNTAIN AT SABRE NIGERIA ANNIVERSARY LECTURE, AWARD/GALA NITE CONGRATULATIONS TO SABRE ON
EMERGING TRENDS IN TECHNOLOGY THAT ARE CHANGING THE AVIATION WORLD A PRESENTATION BY BABATUNDE FAGBEMI MD SPRINGFOUNTAIN AT SABRE NIGERIA ANNIVERSARY LECTURE, AWARD/GALA NITE CONGRATULATIONS TO SABRE ON
The Seventh China-EU Summit Held in The Hague, the Netherlands
 The Seventh China-EU Summit Held in The Hague, the Netherlands Renewal of China-EU Science and Technology Co-operation Agreement Presence at the Sixth China High-Tech Fair in Shenzhen China-Greece Workshop
The Seventh China-EU Summit Held in The Hague, the Netherlands Renewal of China-EU Science and Technology Co-operation Agreement Presence at the Sixth China High-Tech Fair in Shenzhen China-Greece Workshop
Research Development Request - Profile Template. European Commission
 Research Development Request - Profile Template European Commission Research Development Request Profile The following table can be used as a template for drafting a Research Development Request profile.
Research Development Request - Profile Template European Commission Research Development Request Profile The following table can be used as a template for drafting a Research Development Request profile.