End-to-End Simulation and Verification of Rendezvous and Docking/Berthing Systems using Robotics
|
|
|
- Scot Hawkins
- 5 years ago
- Views:
Transcription
 SPEAKER: Heike Benninghoff e-mail: Heike.")
1 Session 9 Special Test End-to-End Simulation and Verification of Rendezvous and Docking/Berthing Systems using Robotics Author(s): H. Benninghoff, F. Rems, M. Gnat, R. Faller, R. Krenn, M. Stelzer, B. Brunner, G. Panin, German Aerospace Center (DLR) SPEAKER: Heike Benninghoff Heike.Benninghoff@dlr.de
2 Contents Introduction to De-Orbiting, Active Debris Removal, On-Orbit Servicing Overview Project On-Orbit Servicing End-to-End Simulation Rendezvous and Docking / Berthing Concept Components of End-to-End Simulation Status of the Project, Conclusion 2




3 Motivation De-Orbiting, Active Debris Removal, On-Orbit Servicing Increasing number of non-operative, in-active satellites in strategic, important orbits (LEO, GEO) High collision risks cascade effect/ Kessler syndrome De-orbiting, active debris removal Active satellites: high complexity, increasing costs Life-time extension by servicing and repairing Challenges: Passive, non-cooperative target satellite, not prepared for rendezvous and docking (RvD) Target with lost attitude control or other damages Safety and robustness requirements in case of full autonomous RvD Advanced test and simulations necessary 3


4 On-Orbit Servicing End-to-End Simulation Development of the infrastructure to simulate an entire rendezvous and docking/berthing process of an on-orbit servicing mission including space segment simulation incl. software and hardware simulators ground segment development incl. communicational and operational infrastructure 4


 at 20m")

 at 10m")


")
")

5 Rendezvous and Docking/Berthing Concept Far and Mid Range Rendezvous to Inspection Point (IP) at 20m distance Straight Line Approach to Pose Initialization Point (PI) at 10m distance Observation of the tumbling motion, approach planning Fly around to PI-1 (with angle φ) Straight Line Approach to Mating Point (MP) Capturing of the client with a robotic arm CCD Camera PMD Camera LiDAR 5
 RvD Simulator 2 robots with")
 Mounted target mockup")
 Real-time control")
6 Components of End-to-End OOS Simulation 1/4 EPOS Simulator EPOS (European Proximity Operations Simulator) RvD Simulator 2 robots with each 6 degrees of freedom to simulate motion of servicer and client satellite 1 linear slide/rail system (25m) Mounted target mockup Installed RvD sensors GNC (Guidance, navigation and control) system Navigation based on optical sensors (cameras, LiDAR) Real-time control of the facility 6

7 Components of End-to-End OOS Simulation 2/4 OOS Simulator OOS Sim (On-orbit servicing simulator) Berthing Simulator 2 robots with each 6 degrees of freedom to simulate motion of servicer and client satellite Mounted target mockup Installed robotic arm on the servicer to perform the grasping/capturing of the client 7
 Simulation of the")

8 Components of End-to-End OOS Simulation 3/4 Satellite Simulator Software simulator Satellite dynamics simulation (translational and rotational motion of servicer and client spacecraft) Simulation of the servicer s subsystems: AOCS (attitude and orbit control system), power and thermal Provision of the servicer s onboard data handling system and the infrastructure to communicate with the ground control center 8



9 Components of End-to-End OOS Simulation 4/4 Communication and Operation Systems Communication and operation software and hardware components as used for a real mission Preparation of all facilities and control rooms Network installation IT infrastructure Mission Control Center Flight Operations System (Mission Planning, Spacecraft Control Operations, Archiving, Logging) Ground Data System (Telemetry and Telecommand, Services, Voice Communication, etc.) Consoles (Satellite, Rendezvous, Robotic) 9


 REF")




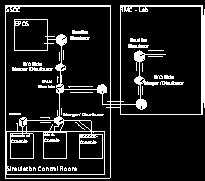


10 EPOS & GNC CMD EPOS RvD Simulator (EPOS Robots + GNC Payload) REF & GNC DAT OOS Sim & ROB CMD OOS Sim Berthing Simulator (OOS Sim Robots + Robotic Payload) REF & ROB DAT Satellite Simulator Communication System GNC TC GNC TM SAT TC SAT TM ROB TC ROB TM Rendezvous Console Satellite Console Robotic Console 10




11 Status of the Project Project 01/ /2017 Current Phase: Implementation Phase Implementation of the single components nearly finished Test of the single sub-systems First interface tests between the subsystems Development of a detailed test and integration plan 10/ /2017: Test & Verification Phase Integration Test of the entire system Demonstrations Publications 11

12 Questions? 12
On-Orbit Servicing Mission Operations at GSOC
 SpaceOps 2010 ConferenceDelivering on the DreamHosted by NASA Mars 25-30 April 2010, Huntsville, Alabama AIAA 2010-1975 On-Orbit Servicing Mission Operations at GSOC S. Eberle
SpaceOps 2010 ConferenceDelivering on the DreamHosted by NASA Mars 25-30 April 2010, Huntsville, Alabama AIAA 2010-1975 On-Orbit Servicing Mission Operations at GSOC S. Eberle
Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit
 www.dlr.de Chart 1 Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit Steffen Jaekel, R. Lampariello, G. Panin, M. Sagardia, B. Brunner, O. Porges, and E. Kraemer (1) M. Wieser,
www.dlr.de Chart 1 Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit Steffen Jaekel, R. Lampariello, G. Panin, M. Sagardia, B. Brunner, O. Porges, and E. Kraemer (1) M. Wieser,
The DLR On-Orbit Servicing Testbed
 The DLR On-Orbit Servicing Testbed J. Artigas, R. Lampariello, B. Brunner, M. Stelzer, C. Borst, K. Landzettel, G. Hirzinger, A. Albu-Schäffer Robotics and Mechatronics Center, DLR VR-OOS Workshop 2012
The DLR On-Orbit Servicing Testbed J. Artigas, R. Lampariello, B. Brunner, M. Stelzer, C. Borst, K. Landzettel, G. Hirzinger, A. Albu-Schäffer Robotics and Mechatronics Center, DLR VR-OOS Workshop 2012
Tool Chains for Simulation and Experimental Validation of Orbital Robotic Technologies
 DLR.de Chart 1 > The Next Generation of Space Robotic Servicing Technologies > Ch. Borst Exploration of Orbital Robotic Technologies > 26.05.2015 Tool Chains for Simulation and Experimental Validation
DLR.de Chart 1 > The Next Generation of Space Robotic Servicing Technologies > Ch. Borst Exploration of Orbital Robotic Technologies > 26.05.2015 Tool Chains for Simulation and Experimental Validation
GNC/AOCS DEVELOPMENT SYSTEM FOR RENDEZ-VOUS AND DOCKING MISSIONS AT SENER, AND ASSOCIATED TEST FACILITIES
 . GNC/AOCS DEVELOPMENT SYSTEM FOR RENDEZ-VOUS AND DOCKING MISSIONS AT SENER, AND ASSOCIATED TEST FACILITIES Gonzalo Saavedra, Antonio Ayuso, Juan Manuel del Cura, Jose Maria Fernandez, Salvador Llorente,
. GNC/AOCS DEVELOPMENT SYSTEM FOR RENDEZ-VOUS AND DOCKING MISSIONS AT SENER, AND ASSOCIATED TEST FACILITIES Gonzalo Saavedra, Antonio Ayuso, Juan Manuel del Cura, Jose Maria Fernandez, Salvador Llorente,
Automation & Robotics (A&R) for Space Applications in the German Space Program
 for Space Applications in the German Space Program") B. Sommer, RD-RR 1 Automation & Robotics (A&R) for Space Applications in the German Space Program ASTRA 2002 ESTEC, November 2002 1 2 Current and future application areas Unmanned exploration of the cold
B. Sommer, RD-RR 1 Automation & Robotics (A&R) for Space Applications in the German Space Program ASTRA 2002 ESTEC, November 2002 1 2 Current and future application areas Unmanned exploration of the cold
COE CST First Annual Technical Meeting: Autonomous Rendezvous & Docking Penina Axelrad. Federal Aviation. Administration.
 Administration COE CST First Annual Technical Meeting: Autonomous Rendezvous & Docking Penina Axelrad November 10, 2011 Administration 1 Overview Team Members Purpose of Task Research Methodology Results
Administration COE CST First Annual Technical Meeting: Autonomous Rendezvous & Docking Penina Axelrad November 10, 2011 Administration 1 Overview Team Members Purpose of Task Research Methodology Results
Integrated Technology Concept for Robotic On-Orbit Servicing Systems
 Integrated Technology Concept for Robotic On-Orbit Servicing Systems Bernd Maediger, Airbus DS GmbH Bremen, Germany Visual-based navigation Manipulation Grasping Non-cooperative target GNC Visual-based
Integrated Technology Concept for Robotic On-Orbit Servicing Systems Bernd Maediger, Airbus DS GmbH Bremen, Germany Visual-based navigation Manipulation Grasping Non-cooperative target GNC Visual-based
RobOps Approaching a Holistic and Unified Interface Service Definition for Future Robotic Spacecraft
 www.dlr.de Chart 1 RobOps Approaching a Holistic and Unified Interface Service Definition for Future Robotic Spacecraft Steffen Jaekel, Bernhard Brunner (1) Christian Laroque, Zoran Pjevic (2) Felix Flentge
www.dlr.de Chart 1 RobOps Approaching a Holistic and Unified Interface Service Definition for Future Robotic Spacecraft Steffen Jaekel, Bernhard Brunner (1) Christian Laroque, Zoran Pjevic (2) Felix Flentge
Design of a Remote-Cockpit for small Aerospace Vehicles
 Design of a Remote-Cockpit for small Aerospace Vehicles Muhammad Faisal, Atheel Redah, Sergio Montenegro Universität Würzburg Informatik VIII, Josef-Martin Weg 52, 97074 Würzburg, Germany Phone: +49 30
Design of a Remote-Cockpit for small Aerospace Vehicles Muhammad Faisal, Atheel Redah, Sergio Montenegro Universität Würzburg Informatik VIII, Josef-Martin Weg 52, 97074 Würzburg, Germany Phone: +49 30
The PROBA Missions Design Capabilities for Autonomous Guidance, Navigation and Control. Jean de Lafontaine President
 The PROBA Missions Design Capabilities for Autonomous Guidance, Navigation and Control Jean de Lafontaine President Overview of NGC NGC International Inc (holding company) NGC Aerospace Ltd Sherbrooke,
The PROBA Missions Design Capabilities for Autonomous Guidance, Navigation and Control Jean de Lafontaine President Overview of NGC NGC International Inc (holding company) NGC Aerospace Ltd Sherbrooke,
ESA Developments on GNC Systems for Non-Cooperative Rendezvous
 ESA Developments on GNC Systems for Non-Cooperative Rendezvous Jesus Gil and Guillermo Ortega May 23-27, 2016 Clean Space Industrial Days ESTEC, The Netherlands 1 Table of Contents Introduction Applications
ESA Developments on GNC Systems for Non-Cooperative Rendezvous Jesus Gil and Guillermo Ortega May 23-27, 2016 Clean Space Industrial Days ESTEC, The Netherlands 1 Table of Contents Introduction Applications
Model Based AOCS Design and Automatic Flight Code Generation: Experience and Future Development
 ADCSS 2016 October 20, 2016 Model Based AOCS Design and Automatic Flight Code Generation: Experience and Future Development SATELLITE SYSTEMS Per Bodin Head of AOCS Department OHB Sweden Outline Company
ADCSS 2016 October 20, 2016 Model Based AOCS Design and Automatic Flight Code Generation: Experience and Future Development SATELLITE SYSTEMS Per Bodin Head of AOCS Department OHB Sweden Outline Company
ARMADILLO: Subsystem Booklet
 ARMADILLO: Subsystem Booklet Mission Overview The ARMADILLO mission is the Air Force Research Laboratory s University Nanosatellite Program s 7 th winner. ARMADILLO is a 3U cube satellite (cubesat) constructed
ARMADILLO: Subsystem Booklet Mission Overview The ARMADILLO mission is the Air Force Research Laboratory s University Nanosatellite Program s 7 th winner. ARMADILLO is a 3U cube satellite (cubesat) constructed
Orbicraft Pro Complete CubeSat kit based on Raspberry-Pi
 Orbicraft Pro Complete CubeSat kit based on Raspberry-Pi (source IAA-AAS-CU-17-10-05) Speaker: Roman Zharkikh Authors: Roman Zharkikh Zaynulla Zhumaev Alexander Purikov Veronica Shteyngardt Anton Sivkov
Orbicraft Pro Complete CubeSat kit based on Raspberry-Pi (source IAA-AAS-CU-17-10-05) Speaker: Roman Zharkikh Authors: Roman Zharkikh Zaynulla Zhumaev Alexander Purikov Veronica Shteyngardt Anton Sivkov
Space Debris Related Activities -Japanese Case-
 2013.02.11 IAF Workshop, UN/COPUOS Space Debris Related Activities -Japanese Case- Tetsuo Yasaka Kyushu University, Prof. Emeritus QPS Institute Notable Features Japan- 1. No significant fragmentation
2013.02.11 IAF Workshop, UN/COPUOS Space Debris Related Activities -Japanese Case- Tetsuo Yasaka Kyushu University, Prof. Emeritus QPS Institute Notable Features Japan- 1. No significant fragmentation
The TEXAS Satellite Design Laboratory: An Overview of Our Current Projects FASTRAC, BEVO-2, & ARMADILLO
 The TEXAS Satellite Design Laboratory: An Overview of Our Current Projects FASTRAC, BEVO-2, & ARMADILLO Dr. E. Glenn Lightsey (Principal Investigator), Sebastián Muñoz, Katharine Brumbaugh UT Austin s
The TEXAS Satellite Design Laboratory: An Overview of Our Current Projects FASTRAC, BEVO-2, & ARMADILLO Dr. E. Glenn Lightsey (Principal Investigator), Sebastián Muñoz, Katharine Brumbaugh UT Austin s
Space Debris Mitigation
 Space Debris Mitigation The CleanSpace One Project Volker Gass, Claude Nicollier, Anton Ivanov, Muriel Richard Swiss Space Center 27 March 2012 Ref. SSC-CSO-1-0-Generic Presentation 27-03-12.pptx Context
Space Debris Mitigation The CleanSpace One Project Volker Gass, Claude Nicollier, Anton Ivanov, Muriel Richard Swiss Space Center 27 March 2012 Ref. SSC-CSO-1-0-Generic Presentation 27-03-12.pptx Context
PORTUGUESE ASSOCIATION OF SPACE INDUSTRIES
 PORTUGUESE ASSOCIATION OF SPACE INDUSTRIES 1 Proespaço is a non-profit organization whose Mission is to promote Portuguese Industry Space activities, within National authorities and next to Major International
PORTUGUESE ASSOCIATION OF SPACE INDUSTRIES 1 Proespaço is a non-profit organization whose Mission is to promote Portuguese Industry Space activities, within National authorities and next to Major International
ETS-VII: Achievements, Troubles and Future
 Proceeding of the 6 th International Symposium on Artificial Intelligence and Robotics & Automation in Space: i-sairas 2001, Canadian Space Agency, St-Hubert, Quebec, Canada, June 18-22, 2001. ETS-VII:
Proceeding of the 6 th International Symposium on Artificial Intelligence and Robotics & Automation in Space: i-sairas 2001, Canadian Space Agency, St-Hubert, Quebec, Canada, June 18-22, 2001. ETS-VII:
Canadian Activities in Intelligent Robotic Systems - An Overview
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Canadian Activities in Intelligent Robotic
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Canadian Activities in Intelligent Robotic
Design for Removal. Executive Summary Report
 ISSUE : 1 Page : 1/15 Design for Removal Executive Summary Report ESA STUDY CONTRACT REPORT ESA Contract No: 4000116081/15/NL/GL C/as SUBJECT: Design for Removal CONTRACTOR: Thales Alenia Space NAME OF
ISSUE : 1 Page : 1/15 Design for Removal Executive Summary Report ESA STUDY CONTRACT REPORT ESA Contract No: 4000116081/15/NL/GL C/as SUBJECT: Design for Removal CONTRACTOR: Thales Alenia Space NAME OF
Tele-manipulation of a satellite mounted robot by an on-ground astronaut
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Tele-manipulation of a satellite mounted robot by an on-ground astronaut M. Oda, T. Doi, K. Wakata
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Tele-manipulation of a satellite mounted robot by an on-ground astronaut M. Oda, T. Doi, K. Wakata
ARL Fall 2017 Meetings
 ARL Fall 2017 Meetings Miguel Nunes Assistant Specialist, Hawaii Institute of Geophysics and Planetology (HIGP) and Hawaii Space Flight Laboratory (HSFL) Autonomous Docking with Small Satellites Overview
ARL Fall 2017 Meetings Miguel Nunes Assistant Specialist, Hawaii Institute of Geophysics and Planetology (HIGP) and Hawaii Space Flight Laboratory (HSFL) Autonomous Docking with Small Satellites Overview
Unmanned on-orbit servicing (OOS), ROKVISS and the TECSAS mission
, ROKVISS and the TECSAS mission") In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 On-Orbit Servicing (OOS), ROKVISS and
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 On-Orbit Servicing (OOS), ROKVISS and
VBS - The Optical Rendezvous and Docking Sensor for PRISMA
 Downloaded from orbit.dtu.dk on: Jul 04, 2018 VBS - The Optical Rendezvous and Docking Sensor for PRISMA Jørgensen, John Leif; Benn, Mathias Published in: Publication date: 2010 Document Version Publisher's
Downloaded from orbit.dtu.dk on: Jul 04, 2018 VBS - The Optical Rendezvous and Docking Sensor for PRISMA Jørgensen, John Leif; Benn, Mathias Published in: Publication date: 2010 Document Version Publisher's
Spacecraft RendezVous and Docking (RVD) using electro-magnetic interactions
 using electro-magnetic interactions") Spacecraft RendezVous and Docking (RVD) using electro-magnetic interactions Ph.D. COURSE IN SPACE SCIENCES, TECHNOLOGIES AND MEASUREMENTS Curriculum STASA - XXX CYCLE Padova, 20 October 2017 Admission
Spacecraft RendezVous and Docking (RVD) using electro-magnetic interactions Ph.D. COURSE IN SPACE SCIENCES, TECHNOLOGIES AND MEASUREMENTS Curriculum STASA - XXX CYCLE Padova, 20 October 2017 Admission
Mission Applications for Space A&R - G.Visentin 1. Automation and Robotics Section (TEC-MMA)
") In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Gianfranco Visentin Head, Automation
In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Gianfranco Visentin Head, Automation
Formation Flying Slide 2 ION Alberta Chapter > Calgary > 20 Dec 2012
 Formation Flying Slide 2 ION Alberta Chapter > Calgary > 20 Dec 2012 PRISMA (SSC) (SSC) Swedish technology demonstration mission Two micro-satellites (MANGO, TANGO) Qualification of sensors (GPS, FFRF,
Formation Flying Slide 2 ION Alberta Chapter > Calgary > 20 Dec 2012 PRISMA (SSC) (SSC) Swedish technology demonstration mission Two micro-satellites (MANGO, TANGO) Qualification of sensors (GPS, FFRF,
Dream Chaser for European Utilization (DC 4 EU):
:") 54th European Space Science Committee Plenary Meeting 22-24 November 2017 German Aerospace Centre DLR Obepfaffenhofen, Germany Presenter: Dr. Marco Berg Dream Chaser for European Utilization (DC 4 EU):
54th European Space Science Committee Plenary Meeting 22-24 November 2017 German Aerospace Centre DLR Obepfaffenhofen, Germany Presenter: Dr. Marco Berg Dream Chaser for European Utilization (DC 4 EU):
Rome, Changing of the Requirements and Astrofein s Business Models for Cubesat Deployer
 Rome, 07.12.2017 4 th IAA Conference on University Satellite Missions and Cubesat Workshop Changing of the Requirements and Astrofein s Business Models for Cubesat Deployer Stephan Roemer Head of Space
Rome, 07.12.2017 4 th IAA Conference on University Satellite Missions and Cubesat Workshop Changing of the Requirements and Astrofein s Business Models for Cubesat Deployer Stephan Roemer Head of Space
Agent Model of On-Orbit Servicing Based on Orbital Transfers
 Agent Model of On-Orbit Servicing Based on Orbital Transfers September 20, 2007 M. Richards, N. Shah, and D. Hastings Massachusetts Institute of Technology Agenda On-Orbit Servicing (OOS) Overview Model
Agent Model of On-Orbit Servicing Based on Orbital Transfers September 20, 2007 M. Richards, N. Shah, and D. Hastings Massachusetts Institute of Technology Agenda On-Orbit Servicing (OOS) Overview Model
Research Activities on Small Satellite in HIT
 7th UK-China Workshop on Space Science and Technology Research Activities on Small Satellite in HIT Prof. ZHANG Shijie (RCST) Contents 7th UK-China Workshop on Space Science and Technology 1. RCST Overview
7th UK-China Workshop on Space Science and Technology Research Activities on Small Satellite in HIT Prof. ZHANG Shijie (RCST) Contents 7th UK-China Workshop on Space Science and Technology 1. RCST Overview
Development of the Satellite Ground Control System for Multi-mission Geostationary Satellite COMS
 SpaceOps 2010 ConferenceDelivering on the DreamHosted by NASA Mars 25-30 April 2010, Huntsville, Alabama AIAA 2010-2381 Development of the Satellite Ground Control System for Multi-mission
SpaceOps 2010 ConferenceDelivering on the DreamHosted by NASA Mars 25-30 April 2010, Huntsville, Alabama AIAA 2010-2381 Development of the Satellite Ground Control System for Multi-mission
From Single to Formation Flying CubeSats: An Update of the Delfi Programme
 From Single to Formation Flying CubeSats: An Update of the Delfi Programme Jian Guo, Jasper Bouwmeester & Eberhard Gill 1 Outline Introduction Delfi-C 3 Mission Delfi-n3Xt Mission Lessons Learned DelFFi
From Single to Formation Flying CubeSats: An Update of the Delfi Programme Jian Guo, Jasper Bouwmeester & Eberhard Gill 1 Outline Introduction Delfi-C 3 Mission Delfi-n3Xt Mission Lessons Learned DelFFi
Preparation of the Electronic Paper for the Proceedings of the. 11th Int. WS on Simulation & EGSE facilities for Space Programmes SESP 2010
 Preparation of the Electronic Paper for the Proceedings of the 11th Int. WS on Simulation & EGSE facilities for Space Programmes SESP 21 28-3 September at ESTEC, Noordwijk, the Netherlands HARDWARE IN-THE-LOOP
Preparation of the Electronic Paper for the Proceedings of the 11th Int. WS on Simulation & EGSE facilities for Space Programmes SESP 21 28-3 September at ESTEC, Noordwijk, the Netherlands HARDWARE IN-THE-LOOP
Ground Systems for Small Sats: Simple, Fast, Inexpensive
 Ground Systems for Small Sats: Simple, Fast, Inexpensive but Effective 15 th Ground Systems Architecture Workshop March 1, 2011 Mr Andrew Kwas, Mr Greg Shreve, Northrop Grumman Corp, Mr Adam Yozwiak, Cornell
Ground Systems for Small Sats: Simple, Fast, Inexpensive but Effective 15 th Ground Systems Architecture Workshop March 1, 2011 Mr Andrew Kwas, Mr Greg Shreve, Northrop Grumman Corp, Mr Adam Yozwiak, Cornell
The RVS3000 rendezvous and docking sensor technology
 The RVS3000 rendezvous and docking sensor technology ESA Clean Space Industry Days, 23 25 Oct 2018 Hans K. Raue, Sales Director, Jena-Optronik Dr. Sebastian Dochow, Director LIDAR Products, Jena-Optronik
The RVS3000 rendezvous and docking sensor technology ESA Clean Space Industry Days, 23 25 Oct 2018 Hans K. Raue, Sales Director, Jena-Optronik Dr. Sebastian Dochow, Director LIDAR Products, Jena-Optronik
Earth Observation at Spin.Works
 Earth Observation at Spin.Works H2020 Space Information Day Lisboa September 29, 2016 Spin.Works, S.A. Av. Da Igreja nº42 6º 1700-239 Lisboa Phone/Fax +351 21 012 8452 info@spinworks.pt www.spinworks.pt
Earth Observation at Spin.Works H2020 Space Information Day Lisboa September 29, 2016 Spin.Works, S.A. Av. Da Igreja nº42 6º 1700-239 Lisboa Phone/Fax +351 21 012 8452 info@spinworks.pt www.spinworks.pt
SPACE. (Some space topics are also listed under Mechatronic topics)
") SPACE (Some space topics are also listed under Mechatronic topics) Dr Xiaofeng Wu Rm N314, Bldg J11; ph. 9036 7053, Xiaofeng.wu@sydney.edu.au Part I SPACE ENGINEERING 1. Vision based satellite formation
SPACE (Some space topics are also listed under Mechatronic topics) Dr Xiaofeng Wu Rm N314, Bldg J11; ph. 9036 7053, Xiaofeng.wu@sydney.edu.au Part I SPACE ENGINEERING 1. Vision based satellite formation
Space Systems Engineering
 Space Systems Engineering This course studies the space systems engineering referring to spacecraft examples. It covers the mission analysis and design, system design approach, systems engineering process
Space Systems Engineering This course studies the space systems engineering referring to spacecraft examples. It covers the mission analysis and design, system design approach, systems engineering process
GAMMa - A modular ascender concept for sample return missions
 GAMMa - A modular ascender concept for sample return missions IPPW 15, Boulder, Colorado, USA 14 th June 2018 R. Buchwald, F. Ebert, O. Angerer Lunar Polar Sample Return (LPSR) Mars Sample Return (MSR)
GAMMa - A modular ascender concept for sample return missions IPPW 15, Boulder, Colorado, USA 14 th June 2018 R. Buchwald, F. Ebert, O. Angerer Lunar Polar Sample Return (LPSR) Mars Sample Return (MSR)
Spaceborne GNSS at DLR/GSOC
 Spaceborne GNSS at DLR/GSOC O.Montenbruck German Space Operations Center, DLR Slide 1 Organization DLR (German Aerospace Center) Aeronautics, astronautics, energy, and transport research National Space
Spaceborne GNSS at DLR/GSOC O.Montenbruck German Space Operations Center, DLR Slide 1 Organization DLR (German Aerospace Center) Aeronautics, astronautics, energy, and transport research National Space
A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing
 A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing Robin Wolff German Aerospace Center (DLR), Germany Slide 1 Outline! Motivation!
A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing Robin Wolff German Aerospace Center (DLR), Germany Slide 1 Outline! Motivation!
Operationally Responsive Satellite System CuSat - Nanosat with an Attitude
 Operationally Responsive Satellite System CuSat - Nanosat with an Attitude Presenters: Mr. Greg Shreve, Northrop Grumman Corp. Mr. Andrew Kwas, Northrop Grumman Corp. Co author: Mr. Albert Ren, Cornell
Operationally Responsive Satellite System CuSat - Nanosat with an Attitude Presenters: Mr. Greg Shreve, Northrop Grumman Corp. Mr. Andrew Kwas, Northrop Grumman Corp. Co author: Mr. Albert Ren, Cornell
Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations and Exploration Systems
 Walt Truszkowski, Harold L. Hallock, Christopher Rouff, Jay Karlin, James Rash, Mike Hinchey, and Roy Sterritt Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations
Walt Truszkowski, Harold L. Hallock, Christopher Rouff, Jay Karlin, James Rash, Mike Hinchey, and Roy Sterritt Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations
On- orbit Satellite Servicing Status and Strategy of Japan
 On- orbit Satellite Servicing Status and Strategy of Japan May 2012 Mitsushige Oda (Prof. Dr.Eng.) Japan Aerospace ExploraGon Agency (JAXA) Tokyo InsGtute of Technology Mitsushige Oda Joined NASDA (now
On- orbit Satellite Servicing Status and Strategy of Japan May 2012 Mitsushige Oda (Prof. Dr.Eng.) Japan Aerospace ExploraGon Agency (JAXA) Tokyo InsGtute of Technology Mitsushige Oda Joined NASDA (now
Phone: , Fax: , Germany
 The TET-1 Satellite Bus A High Reliability Bus for Earth Observation, Scientific and Technology Verification Missions in LEO Pestana Conference Centre Funchal, Madeira - Portugal 31 May 4 June 2010 S.
The TET-1 Satellite Bus A High Reliability Bus for Earth Observation, Scientific and Technology Verification Missions in LEO Pestana Conference Centre Funchal, Madeira - Portugal 31 May 4 June 2010 S.
FlexCore: Low-Cost Attitude Determination and Control Enabling High-Performance Small Spacecraft
 SSC16-X-7 FlexCore: Low-Cost Attitude Determination and Control Enabling High-Performance Small Spacecraft Daniel Hegel Blue Canyon Technologies 2425 55 th St. Suite A-200, Boulder, CO, 80301; 720 458-0703
SSC16-X-7 FlexCore: Low-Cost Attitude Determination and Control Enabling High-Performance Small Spacecraft Daniel Hegel Blue Canyon Technologies 2425 55 th St. Suite A-200, Boulder, CO, 80301; 720 458-0703
Air Force Institute of Technology. A CubeSat Mission for Locating and Mapping Spot Beams of GEO Comm-Satellites
 Air Force Institute of Technology A CubeSat Mission for Locating and Mapping Spot Beams of GEO Comm-Satellites Lt. Jake LaSarge PI: Dr. Jonathan Black Dr. Brad King Dr. Gary Duke August 9, 2015 1 Outline
Air Force Institute of Technology A CubeSat Mission for Locating and Mapping Spot Beams of GEO Comm-Satellites Lt. Jake LaSarge PI: Dr. Jonathan Black Dr. Brad King Dr. Gary Duke August 9, 2015 1 Outline
NWO Servicing NGST. Chuck Lillie November 6, 2008
 NWO Servicing NGST Chuck Lillie November 6, 2008 Design for Servicing Future space observatories should be designed to enable on-orbit servicing to: Replenish expendables Replace limited-lifetime items
NWO Servicing NGST Chuck Lillie November 6, 2008 Design for Servicing Future space observatories should be designed to enable on-orbit servicing to: Replenish expendables Replace limited-lifetime items
Space Situational Awareness 2015: GPS Applications in Space
 Space Situational Awareness 2015: GPS Applications in Space James J. Miller, Deputy Director Policy & Strategic Communications Division May 13, 2015 GPS Extends the Reach of NASA Networks to Enable New
Space Situational Awareness 2015: GPS Applications in Space James J. Miller, Deputy Director Policy & Strategic Communications Division May 13, 2015 GPS Extends the Reach of NASA Networks to Enable New
Proximity Operations Nano-Satellite Flight Demonstration (PONSFD) Overview
 Overview") Proximity Operations Nano-Satellite Flight Demonstration (PONSFD) Overview April 25 th, 2013 Scott MacGillivray, President Tyvak Nano-Satellite Systems LLC 15265 Alton Parkway, Suite 200 Irvine, CA 92618-2606
Proximity Operations Nano-Satellite Flight Demonstration (PONSFD) Overview April 25 th, 2013 Scott MacGillivray, President Tyvak Nano-Satellite Systems LLC 15265 Alton Parkway, Suite 200 Irvine, CA 92618-2606
RemoveDebris Mission: Briefing to UNCOPUOS
 Changing the economics of space RemoveDebris Mission: Briefing to UNCOPUOS 9 th Feb 2015 Chris Saunders Surrey Satellite Technology Limited Guildford, United Kingdom RemoveDebris Mission RemoveDebris is
Changing the economics of space RemoveDebris Mission: Briefing to UNCOPUOS 9 th Feb 2015 Chris Saunders Surrey Satellite Technology Limited Guildford, United Kingdom RemoveDebris Mission RemoveDebris is
The new German Space Strategy makes the space sector fit for the future Dr. Juergen Drescher DLR Washington Office
 The new German Space Strategy makes the space sector fit for the future Dr. Juergen Drescher DLR Washington Office 6th Eilene M. Galloway Symposium Washington D.C., December 1st, 2011 Space Policy of the
The new German Space Strategy makes the space sector fit for the future Dr. Juergen Drescher DLR Washington Office 6th Eilene M. Galloway Symposium Washington D.C., December 1st, 2011 Space Policy of the
Application of an optical data link on DLR s BIROS satellite
 www.dlr.de Chart 1 > OSIRIS @ SpaceOps > C. Fuchs > DLR Institute of Communications and Navigation Application of an optical data link on DLR s BIROS satellite Martin Brechtelsbauer, Christopher Schmidt,
www.dlr.de Chart 1 > OSIRIS @ SpaceOps > C. Fuchs > DLR Institute of Communications and Navigation Application of an optical data link on DLR s BIROS satellite Martin Brechtelsbauer, Christopher Schmidt,
CubeSat Proximity Operations Demonstration (CPOD) Vehicle Avionics and Design
 Vehicle Avionics and Design") CubeSat Proximity Operations Demonstration (CPOD) Vehicle Avionics and Design August CubeSat Workshop 2015 Austin Williams VP, Space Vehicles CPOD: Big Capability in a Small Package Communications ADCS
CubeSat Proximity Operations Demonstration (CPOD) Vehicle Avionics and Design August CubeSat Workshop 2015 Austin Williams VP, Space Vehicles CPOD: Big Capability in a Small Package Communications ADCS
International Perspectives on Rendezvous and Proximity Operations in Space and Space Sustainability
 International Perspectives on Rendezvous and Proximity Operations in Space and Space Sustainability Brian Weeden Technical Advisor Secure World Foundation Rendezvous and Proximity Operations (RPO) RPO
International Perspectives on Rendezvous and Proximity Operations in Space and Space Sustainability Brian Weeden Technical Advisor Secure World Foundation Rendezvous and Proximity Operations (RPO) RPO
Future technologies for planetary exploration within the European Exploration Envelope Programme at the European Space Agency
 Future technologies for planetary exploration within the European Exploration Envelope Programme at the European Space Agency Jorge Alves, Ludovic Duvet, Sanjay Vijendran Exploration Preparation, Research
Future technologies for planetary exploration within the European Exploration Envelope Programme at the European Space Agency Jorge Alves, Ludovic Duvet, Sanjay Vijendran Exploration Preparation, Research
European Satellite Navigation Competition The DLR Special Topic Prize NEXT GENERATION NAVIGATION. Folie 1
 European Satellite Navigation Competition 2010 The DLR Special Topic Prize NEXT GENERATION NAVIGATION Folie 1 Robert Klarner, DLR Technology Marketing, 01/05/2009 DLR German Aerospace Center Research Institution
European Satellite Navigation Competition 2010 The DLR Special Topic Prize NEXT GENERATION NAVIGATION Folie 1 Robert Klarner, DLR Technology Marketing, 01/05/2009 DLR German Aerospace Center Research Institution
Satellite Testing. Prepared by. A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai
 Satellite Testing Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai @copyright Solar Panel Deployment Test Spacecraft operating
Satellite Testing Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai @copyright Solar Panel Deployment Test Spacecraft operating
PRINCIPAL RESEARCH THEME AUTONOMOUS FLIGHT
 AUTONOMOUS FLIGHT Whereas only a few years ago, unmanned aircraft were still exotic specimens resulting from research efforts devoid of practical applications, today driven by rapid progress in many areas
AUTONOMOUS FLIGHT Whereas only a few years ago, unmanned aircraft were still exotic specimens resulting from research efforts devoid of practical applications, today driven by rapid progress in many areas
THE OPS-SAT NANOSATELLITE MISSION
 THE OPS-SAT NANOSATELLITE MISSION Aerospace O.Koudelka, TU Graz M.Wittig MEW Aerospace D.Evans ESA 1 Contents 1) Introduction 2) ESA s OPS-SAT Mission 3) System Design 4) Communications Experiments 5)
THE OPS-SAT NANOSATELLITE MISSION Aerospace O.Koudelka, TU Graz M.Wittig MEW Aerospace D.Evans ESA 1 Contents 1) Introduction 2) ESA s OPS-SAT Mission 3) System Design 4) Communications Experiments 5)
CubeSat Proximity Operations Demonstration (CPOD) Mission Update Cal Poly CubeSat Workshop San Luis Obispo, CA
 Mission Update Cal Poly CubeSat Workshop San Luis Obispo, CA") CubeSat Proximity Operations Demonstration (CPOD) Mission Update Cal Poly CubeSat Workshop San Luis Obispo, CA 04-22-2015 Austin Williams VP, Space Vehicles ConOps Overview - Designed to Maximize Mission
CubeSat Proximity Operations Demonstration (CPOD) Mission Update Cal Poly CubeSat Workshop San Luis Obispo, CA 04-22-2015 Austin Williams VP, Space Vehicles ConOps Overview - Designed to Maximize Mission
1. SMOS Status 1.1 Payload 1.2 Platform 1.3 Satellite 1.4 Launcher 1.5 FOS 1.6 DPGS 2. Other Developments 3. Future (Near & Far) 4.
 4.") 1. SMOS Status 1.1 Payload 1.2 Platform 1.3 Satellite 1.4 Launcher 1.5 FOS 1.6 DPGS 2. Other Developments 3. Future (Near & Far) 4. Schedule 1 1.1 Payload General: Structural / Thermal Model test campaigns
1. SMOS Status 1.1 Payload 1.2 Platform 1.3 Satellite 1.4 Launcher 1.5 FOS 1.6 DPGS 2. Other Developments 3. Future (Near & Far) 4. Schedule 1 1.1 Payload General: Structural / Thermal Model test campaigns
The Evolution of Nano-Satellite Proximity Operations In-Space Inspection Workshop 2017
 The Evolution of Nano-Satellite Proximity Operations 02-01-2017 In-Space Inspection Workshop 2017 Tyvak Introduction We develop miniaturized custom spacecraft, launch solutions, and aerospace technologies
The Evolution of Nano-Satellite Proximity Operations 02-01-2017 In-Space Inspection Workshop 2017 Tyvak Introduction We develop miniaturized custom spacecraft, launch solutions, and aerospace technologies
Satellite Servicing and The Spirit of Innovation
 Satellite Servicing and The Spirit of Innovation Presented to Goddard Contractors Association June 29, 2012 Frank Cepollina, Associate Director Satellite Servicing Capabilities Office Frank.J.Cepollina@nasa.gov
Satellite Servicing and The Spirit of Innovation Presented to Goddard Contractors Association June 29, 2012 Frank Cepollina, Associate Director Satellite Servicing Capabilities Office Frank.J.Cepollina@nasa.gov
Free-flying Satellite Inspector
 Approved for Public Release (OTR 2017-00263) Free-flying Satellite Inspector In-Space Non-Destructive Inspection Technology Workshop January 31-February 2, 2017 Johnson Space Center, Houston, Tx David
Approved for Public Release (OTR 2017-00263) Free-flying Satellite Inspector In-Space Non-Destructive Inspection Technology Workshop January 31-February 2, 2017 Johnson Space Center, Houston, Tx David
Autonomous Satellite Servicing Using the Orbital Express Demonstration Manipulator System
 Autonomous Satellite Servicing Using the Orbital Express Demonstration Manipulator System Andrew Ogilvie, Justin Allport, Michael Hannah, John Lymer MDA, 9445 Airport Road, Brampton, Ontario, Canada L6S
Autonomous Satellite Servicing Using the Orbital Express Demonstration Manipulator System Andrew Ogilvie, Justin Allport, Michael Hannah, John Lymer MDA, 9445 Airport Road, Brampton, Ontario, Canada L6S
High Precision GNSS in Automotive
 High Precision GNSS in Automotive Jonathan Auld, VP Engineering and Safety 6, March, 2018 2 Global OEM Positioning Solutions and Services for Land, Sea, and Air. GNSS in Automotive Today Today the primary
High Precision GNSS in Automotive Jonathan Auld, VP Engineering and Safety 6, March, 2018 2 Global OEM Positioning Solutions and Services for Land, Sea, and Air. GNSS in Automotive Today Today the primary
CubeSat Integration into the Space Situational Awareness Architecture
 CubeSat Integration into the Space Situational Awareness Architecture Keith Morris, Chris Rice, Mark Wolfson Lockheed Martin Space Systems Company 12257 S. Wadsworth Blvd. Mailstop S6040 Littleton, CO
CubeSat Integration into the Space Situational Awareness Architecture Keith Morris, Chris Rice, Mark Wolfson Lockheed Martin Space Systems Company 12257 S. Wadsworth Blvd. Mailstop S6040 Littleton, CO
Clean Space. A new cross-cutting initiative of ESA. The Clean Space Team 15/04/2013. ESA UNCLASSIFIED For Official Use
 Clean Space A new cross-cutting initiative of ESA The Clean Space Team 15/04/2013 Index Introduction Clean Space Branch 3 Space debris mitigation Branch 4 Space debris remediation Implementation Conclusions
Clean Space A new cross-cutting initiative of ESA The Clean Space Team 15/04/2013 Index Introduction Clean Space Branch 3 Space debris mitigation Branch 4 Space debris remediation Implementation Conclusions
X/Y Antenna Ground Terminals: A Small Sat Cost Effective Approach
 X/Y Antenna Ground Terminals: A Small Sat Cost Effective Approach March 21, 2014 Introduction With the insurgence of the small satellite market the demand for cost effective ground terminals has never
X/Y Antenna Ground Terminals: A Small Sat Cost Effective Approach March 21, 2014 Introduction With the insurgence of the small satellite market the demand for cost effective ground terminals has never
Office of Chief Technologist - Space Technology Program Dr. Prasun Desai Office of the Chief Technologist May 1, 2012
 Office of Chief Technologist - Space Technology Program Dr. Prasun Desai Office of the Chief Technologist May 1, 2012 O f f i c e o f t h e C h i e f T e c h n o l o g i s t Office of the Chief Technologist
Office of Chief Technologist - Space Technology Program Dr. Prasun Desai Office of the Chief Technologist May 1, 2012 O f f i c e o f t h e C h i e f T e c h n o l o g i s t Office of the Chief Technologist
The ESA A&R technology R&D
 The ESA A&R technology R&D Gianfranco Visentin Head, Automation and Robotics Section Directorate of Technical and Quality Management Outline The R&D funding schemes (GSP, TRP, CTP, GSTP, ARTES ) Robotics
The ESA A&R technology R&D Gianfranco Visentin Head, Automation and Robotics Section Directorate of Technical and Quality Management Outline The R&D funding schemes (GSP, TRP, CTP, GSTP, ARTES ) Robotics
Aaron J. Dando Principle Supervisor: Werner Enderle
 Aaron J. Dando Principle Supervisor: Werner Enderle Australian Cooperative Research Centre for Satellite Systems (CRCSS) at the Queensland University of Technology (QUT) Aaron Dando, CRCSS/QUT, 19 th AIAA/USU
Aaron J. Dando Principle Supervisor: Werner Enderle Australian Cooperative Research Centre for Satellite Systems (CRCSS) at the Queensland University of Technology (QUT) Aaron Dando, CRCSS/QUT, 19 th AIAA/USU
1 st IFAC Conference on Mechatronic Systems - Mechatronics 2000, September 18-20, 2000, Darmstadt, Germany
 1 st IFAC Conference on Mechatronic Systems - Mechatronics 2000, September 18-20, 2000, Darmstadt, Germany SPACE APPLICATION OF A SELF-CALIBRATING OPTICAL PROCESSOR FOR HARSH MECHANICAL ENVIRONMENT V.
1 st IFAC Conference on Mechatronic Systems - Mechatronics 2000, September 18-20, 2000, Darmstadt, Germany SPACE APPLICATION OF A SELF-CALIBRATING OPTICAL PROCESSOR FOR HARSH MECHANICAL ENVIRONMENT V.
Space Debris Mitigation Status of China s Launch Vehicle
 Space Debris Mitigation Status of China s Launch Vehicle SONG Qiang (Beijing Institute of Aerospace Systems Engineering) Abstract: China s launch vehicle has being developed for more than 40 years. Various
Space Debris Mitigation Status of China s Launch Vehicle SONG Qiang (Beijing Institute of Aerospace Systems Engineering) Abstract: China s launch vehicle has being developed for more than 40 years. Various
UNCLASSIFIED R-1 ITEM NOMENCLATURE FY 2013 OCO
 Exhibit R-2, RDT&E Budget Item Justification: PB 2013 Air Force DATE: February 2012 BA 3: Advanced Development (ATD) COST ($ in Millions) Program Element 75.103 74.009 64.557-64.557 61.690 67.075 54.973
Exhibit R-2, RDT&E Budget Item Justification: PB 2013 Air Force DATE: February 2012 BA 3: Advanced Development (ATD) COST ($ in Millions) Program Element 75.103 74.009 64.557-64.557 61.690 67.075 54.973
CRITICAL DESIGN REVIEW
 STUDENTS SPACE ASSOCIATION THE FACULTY OF POWER AND AERONAUTICAL ENGINEERING WARSAW UNIVERSITY OF TECHNOLOGY CRITICAL DESIGN REVIEW November 2016 Issue no. 1 Changes Date Changes Pages/Section Responsible
STUDENTS SPACE ASSOCIATION THE FACULTY OF POWER AND AERONAUTICAL ENGINEERING WARSAW UNIVERSITY OF TECHNOLOGY CRITICAL DESIGN REVIEW November 2016 Issue no. 1 Changes Date Changes Pages/Section Responsible
TECHNOLOGY DEVELOPMENT AREAS IN AAWA
 TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
BRIDGING THE GAP: COLLABORATION USING NANOSAT AND CUBESAT PLATFORMS THROUGH THE TEXAS 2 STEP (2 SATELLITE TARGETING EXPERIMENTAL PLATFORM) MISSION
 MISSION") BRIDGING THE GAP: COLLABORATION USING NANOSAT AND CUBESAT PLATFORMS THROUGH THE TEXAS 2 STEP (2 SATELLITE TARGETING EXPERIMENTAL PLATFORM) MISSION Cinnamon Wright, Dax Garner, Jessica Williams, Henri Kjellberg,
BRIDGING THE GAP: COLLABORATION USING NANOSAT AND CUBESAT PLATFORMS THROUGH THE TEXAS 2 STEP (2 SATELLITE TARGETING EXPERIMENTAL PLATFORM) MISSION Cinnamon Wright, Dax Garner, Jessica Williams, Henri Kjellberg,
Automation challenges of the Mission Planning System and the Ground Station Network within the TerraSAR-X/TanDEM-X Ground Segment
 DLR.de Chart 1 Automation challenges of the Mission Planning System and the Ground Station Network within the TerraSAR-X/TanDEM-X Ground Segment F. Mrowka, R. Metzig, B. Schättler, R. Kahle, C. Lenzen,
DLR.de Chart 1 Automation challenges of the Mission Planning System and the Ground Station Network within the TerraSAR-X/TanDEM-X Ground Segment F. Mrowka, R. Metzig, B. Schättler, R. Kahle, C. Lenzen,
IAC-10.C FLIGHT RESULTS FROM THE AUTONOMOUS NAVIGATION AND CONTROL OF FORMATION FLYING SPACECRAFT ON THE PRISMA MISSION
 IAC-10.C1.5.12 FLIGHT RESULTS FROM THE AUTONOMOUS NAVIGATION AND CONTROL OF FORMATION FLYING SPACECRAFT ON THE PRISMA MISSION S. De Florio Department of Aerospace Engineering, University of Glasgow, guest
IAC-10.C1.5.12 FLIGHT RESULTS FROM THE AUTONOMOUS NAVIGATION AND CONTROL OF FORMATION FLYING SPACECRAFT ON THE PRISMA MISSION S. De Florio Department of Aerospace Engineering, University of Glasgow, guest
Ground Station Design for STSAT-3
 Technical Paper Int l J. of Aeronautical & Space Sci. 12(3), 283 287 (2011) DOI:10.5139/IJASS.2011.12.3.283 Ground Station Design for STSAT-3 KyungHee Kim*, Hyochoong Bang*, Jang-Soo Chae**, Hong-Young
Technical Paper Int l J. of Aeronautical & Space Sci. 12(3), 283 287 (2011) DOI:10.5139/IJASS.2011.12.3.283 Ground Station Design for STSAT-3 KyungHee Kim*, Hyochoong Bang*, Jang-Soo Chae**, Hong-Young
The PTR Group Capabilities 2014
 The PTR Group Capabilities 2014 20 Feb 2014 How We Make a Difference Cutting Edge Know How At Cisco, The PTR Group is the preferred North American vendor to develop courseware and train their embedded
The PTR Group Capabilities 2014 20 Feb 2014 How We Make a Difference Cutting Edge Know How At Cisco, The PTR Group is the preferred North American vendor to develop courseware and train their embedded
Integrating Advanced Payload Data Processing in a Demanding CubeSat Mission. Mark McCrum, Peter Mendham
 Integrating Advanced Payload Data Processing in a Demanding CubeSat Mission Mark McCrum, Peter Mendham CubeSat mission capability Nano-satellites missions are increasing in capability Constellations Distributed
Integrating Advanced Payload Data Processing in a Demanding CubeSat Mission Mark McCrum, Peter Mendham CubeSat mission capability Nano-satellites missions are increasing in capability Constellations Distributed
Keeping the universe connected. NASA Update: GNSS Space Service Volume Providers Forum
 Keeping the universe connected. NASA Update: GNSS Space Service Volume Providers Forum Frank H. Bauer, FBauer Aerospace Consulting Services (FB-ACS) for NASA SCaN Program Human Exploration and Operations
Keeping the universe connected. NASA Update: GNSS Space Service Volume Providers Forum Frank H. Bauer, FBauer Aerospace Consulting Services (FB-ACS) for NASA SCaN Program Human Exploration and Operations
Design and Evaluation of an Orbital Debris Remediation System
 Design and Evaluation of an Orbital Debris Remediation System Collision Risk Remediation Designs Design Evaluation 1. Object Categorization 2. Network Analysis 3. Utility Analysis Debris Remediation Systems
Design and Evaluation of an Orbital Debris Remediation System Collision Risk Remediation Designs Design Evaluation 1. Object Categorization 2. Network Analysis 3. Utility Analysis Debris Remediation Systems
Nigerian Communications Satellite Ltd. (NIGCOMSAT)
") OVERVIEW OF NIGERIAN SATELLITE AUGMENTATION SYSTEM COMMENCING WITH PILOT DEMONSTRATION TO VALIDATE NATIONAL WORK PLAN presented by Dr. Lawal Lasisi Salami, NIGERIAN COMMUNICATIONS SATELLITE LTD UNDER FEDERAL
OVERVIEW OF NIGERIAN SATELLITE AUGMENTATION SYSTEM COMMENCING WITH PILOT DEMONSTRATION TO VALIDATE NATIONAL WORK PLAN presented by Dr. Lawal Lasisi Salami, NIGERIAN COMMUNICATIONS SATELLITE LTD UNDER FEDERAL
Asteroid Redirect Mission and Human Exploration. William H. Gerstenmaier NASA Associate Administrator for Human Exploration and Operations
 Asteroid Redirect Mission and Human Exploration William H. Gerstenmaier NASA Associate Administrator for Human Exploration and Operations Leveraging Capabilities for an Asteroid Mission NASA is aligning
Asteroid Redirect Mission and Human Exploration William H. Gerstenmaier NASA Associate Administrator for Human Exploration and Operations Leveraging Capabilities for an Asteroid Mission NASA is aligning
Primary POC: Prof. Hyochoong Bang Organization: Korea Advanced Institute of Science and Technology KAIST POC
 Title: Demonstration of Optical Stellar Interferometry with Near Earth Objects (NEO) using Laser Range Finder by a Nano Satellite Constellation: A Cost effective approach. Primary POC: Prof. Hyochoong
Title: Demonstration of Optical Stellar Interferometry with Near Earth Objects (NEO) using Laser Range Finder by a Nano Satellite Constellation: A Cost effective approach. Primary POC: Prof. Hyochoong
SPACE-12-TEC Guidance Document for. Horizon 2020 Work Programme Final
 Strategic Research Cluster: Space Robotics Technologies SPACE-12-TEC-2018 Guidance Document for Horizon 2020 Work Programme 2018-2020 Final 25/10/2017 Report D3.2-Compendium of SRC activities (for call
Strategic Research Cluster: Space Robotics Technologies SPACE-12-TEC-2018 Guidance Document for Horizon 2020 Work Programme 2018-2020 Final 25/10/2017 Report D3.2-Compendium of SRC activities (for call
Tracking, Telemetry and Command
 Tracking, Telemetry and Command Jyh-Ching Juang ( 莊智清 ) Department of Electrical Engineering National Cheng Kung University juang@mail.ncku.edu.tw April, 2006 1 Purpose Given that the students have acquired
Tracking, Telemetry and Command Jyh-Ching Juang ( 莊智清 ) Department of Electrical Engineering National Cheng Kung University juang@mail.ncku.edu.tw April, 2006 1 Purpose Given that the students have acquired
ARTES 1 ROLLING WORKPLAN 2010
 ARTES 1 ROLLING WORKPLAN 2010 INTRODUCTION This document presents the ARTES 1 Rolling Workplan for 2010. Activities have been selected based on the ARTES Call for Ideas, consultation with participating
ARTES 1 ROLLING WORKPLAN 2010 INTRODUCTION This document presents the ARTES 1 Rolling Workplan for 2010. Activities have been selected based on the ARTES Call for Ideas, consultation with participating
SSC space expertise on the ground
 SSC space expertise on the ground FMV Sensor Symposium Stockholm, September 2016 Björn Ohlson and Petrus Hyvönen Satellite Services for Surveillance & Reconnaissance Navigation Communication and Space
SSC space expertise on the ground FMV Sensor Symposium Stockholm, September 2016 Björn Ohlson and Petrus Hyvönen Satellite Services for Surveillance & Reconnaissance Navigation Communication and Space
13/11/2013. German Aerospace Center. Virtual Reality for Planning and Controlling of Robot-based Servicing in Space. German Aerospace Center
 DLR.de Chart 1 DLR.de Chart 4 German Aerospace Center Virtual Reality for Planning and Controlling of Robot-based Servicing in Space Andreas Gerndt German Aerospace Center (DLR) Simulation and Software
DLR.de Chart 1 DLR.de Chart 4 German Aerospace Center Virtual Reality for Planning and Controlling of Robot-based Servicing in Space Andreas Gerndt German Aerospace Center (DLR) Simulation and Software
Status of Active Debris Removal (ADR) developments at the Swiss Space Center
 developments at the Swiss Space Center") Status of Active Debris Removal (ADR) developments at the Swiss Space Center Muriel Richard, Benoit Chamot, Volker Gass, Claude Nicollier muriel.richard@epfl.ch IAF SYMPOSIUM 2013 11 February 2013 Vienna
Status of Active Debris Removal (ADR) developments at the Swiss Space Center Muriel Richard, Benoit Chamot, Volker Gass, Claude Nicollier muriel.richard@epfl.ch IAF SYMPOSIUM 2013 11 February 2013 Vienna
SURREY GSA CATALOG. Surrey Satellite Technology US LLC 8310 South Valley Highway, 3rd Floor, Englewood, CO
 SURREY CATALOG Space-Qualified flight hardware for small satellites, including GPS receivers, Attitude Determination and Control equipment, Communications equipment and Remote Sensing imagers Professional
SURREY CATALOG Space-Qualified flight hardware for small satellites, including GPS receivers, Attitude Determination and Control equipment, Communications equipment and Remote Sensing imagers Professional
Integral R. Southworth ESA/ESOC Integral Users Group Meeting, ESTEC, 19/1/2012 Mission Extension Operations Review, 2012
 Integral R. Southworth ESA/ESOC Integral Users Group Meeting, ESTEC, 19/1/2012 Mission Extension Operations Review, 2012 Integral IUG 19/1/2012 ESA/ESOC OPS-OA Page 1 Spacecraft Status From MEOR 2010 Changes
Integral R. Southworth ESA/ESOC Integral Users Group Meeting, ESTEC, 19/1/2012 Mission Extension Operations Review, 2012 Integral IUG 19/1/2012 ESA/ESOC OPS-OA Page 1 Spacecraft Status From MEOR 2010 Changes