Arduino. AS220 Workshop. Part II Interactive Design with advanced Transducers Lutz Hamel
|
|
|
- Aubrey Maxwell
- 6 years ago
- Views:
Transcription

1 AS220 Workshop Part II Interactive Design with advanced Transducers Lutz Hamel

2 How we see the computer Image source: Considering the Body, Kate Hartman, 2008.

3 How the computer sees us Image source: Physical Computing, O'Sullivan and Igoe, Thomson, 2004.
4 Principles of Interactive Design The Conversation Loop Listening (Sensing) Thinking (Processing) Speaking (Acting)
5 Principles of Interactive Design Examples of the Loop Sensing read photoresistor value read potentiometer value Processing convert to sound wave period compute PWM duty cycle Acting output sound wave to speaker output PWM signal to LED
6 Principles of Interactive Design Sensing Intensity peak detection threshold setting Peak Detection Duration edge detection Threshold Setting Edge Detection Note: Pulse edge detection is achieved on the with the 'pulsein(pin, value)' function.
7 Principles of Interactive Design Sensing Presence foot switches beam breaking motion detection ultrasonic sensors Attention pushbuttons potentiometers flexsensors

8 Principles of Interactive Design Kelly Dobson Expressive Interfaces
9 Image source: Blendie, Kelly Dobson Principles of Interactive Design Expressive Interfaces

10 Image source: turn signal biking jacket, Leah Buechley Principles of Interactive Design Expressive Interfaces
11 Image source: turn signal biking jacket, Leah Buechley Principles of Interactive Design Expressive Interfaces
12 Acting - Motors The actuators we have seen so far provided us with information Motors allow us to act on the world in a more immediate fashion by creating movement Motors come in many different sizes and functionalities, we discuss two types of motors: RC servos and DC motors
13 RC Servo Motors Remote Control (RC) Motors are DC motors that have control circuitry builtin These motors can be controlled in such a way that you can rotate the spindle between 0 and 180 You guessed it, we use pulse widths to do so
14 RC Servo Motors A pulse every 20msec Pulse width of 1msec 0 Pulse width of 2msec 180 Good News: we have a library that does that for us! Rotation = 0 Rotation = 180

15 RC Servo Motors Idea: Write a sketch that sweeps the motor back and forth through its 180 degrees of rotation.
")
16 RC Servo Motors Notes: You will need an external power supply. The servo library only supports servos on D9 and D10 (see documentation) External Power
17 RC Servo Motors // Sweep // by BARRAGAN < #include <Servo.h> Servo myservo; // create servo object to control a servo // a maximum of eight servo objects can be created int pos = 0; // variable to store the servo position void setup() { myservo.attach(9); } // attaches the servo on digital pin 9 to the servo object void loop() { for(pos = 0; pos < 180; pos += 1) // goes from 0 degrees to 180 degrees { // in steps of 1 degree myservo.write(pos); // tell servo to go to position in variable 'pos' delay(15); // waits 15ms for the servo to reach the position } for(pos = 180; pos>=1; pos-=1) // goes from 180 degrees to 0 degrees { myservo.write(pos); // tell servo to go to position in variable 'pos' delay(15); // waits 15ms for the servo to reach the position } }

18 RC Servo Motors Idea: Use a flex sensor to control the rotation of the servo. Resistance ~9KΩ Image source: ITP/NYU Resistance ~15KΩ

19 RC Servo Motors
20 RC Servo Motors // Controlling a servo position using a flex sensor // based on a sketch by Michal Rinott #include <Servo.h> Servo myservo; int flexpin = 0; int val; void setup() { myservo.attach(9); } void loop() { // reads value between 0 and 1023 val = analogread(flexpin); // scale it to a value between 0 and 180 val = map(val, 500, 400, 0, 180); myservo.write(val); delay(15); }
21 DC Motors A DC motor works by converting electric power into mechanical work This is accomplished by forcing current through a coil and producing a magnetic field that spins the motor Able to run forward and backwards, depending of the orientation of the voltage source


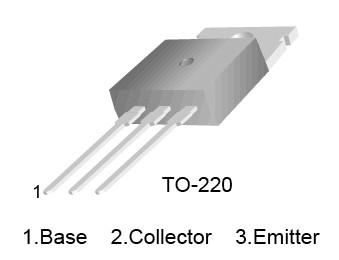
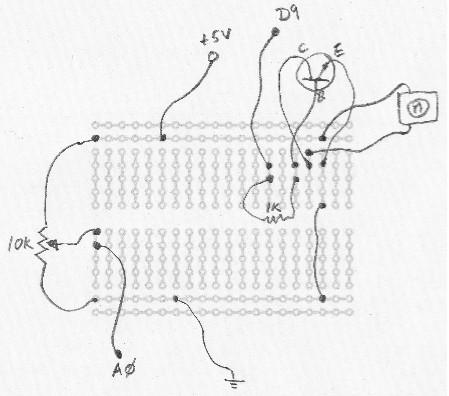
22 DC Motors Idea: Control the speed of the rotation of a DC motor using PWM We read an analog signal from a pot and output the appropriate PWM signal to the motor Caveat: DC motors draw too much current to directly hook up to an IO port Use transistor circuitry to drive the motor
23 Transistors Transistors act like switches: IB Ic If IB= 0 then Ic= 0 If IB 0 then Ic 0

24 DC Motors
25 DC Motors // PWM control of a DC motor int motorpin = 9; int potpin = 0; int val = 0; // motor connected to digital pin 9 (PWM) // pot connected to analog pin 0 void setup() { pinmode(motorpin, OUTPUT); } void loop() { val = analogread(potpin); val = map(val,0,1023,0,254); analogwrite(motorpin,val); delay(100); } // sets the pin as output
 that is able to interpret digital commands and spin the motor in the appropriate")
26 H-Bridge Idea: Use a digital control signal to let a motor spin forwards and backwards We use an H-bridge to accomplish this An H-bridge is an integrated circuit (IC) that is able to interpret digital commands and spin the motor in the appropriate direction


27 H-Bridge SN Motor spins in one direction Command Interpretation Inputs 1A High Low Outputs 2A Low High 1Y High Low 2Y Low High Motor spins in the other direction


28 H-Bridge
29 H-Bridge // digital directional control of a DC motor // using an H-bridge int int int int inputpin = 7; // read digital pin 7 outputpin1 = 8; // output pin 1a to bridge digital pin 8 outputpin2 = 9; // output pin 2a to bridge digital pin 9 val = 0; void setup() { pinmode(inputpin, INPUT); pinmode(outputpin1, OUTPUT); pinmode(outputpin2, OUTPUT); } void loop() { val = digitalread(inputpin); } if (val == HIGH) { digitalwrite(outputpin1, digitalwrite(outputpin2, } else { digitalwrite(outputpin1, digitalwrite(outputpin2, } delay(100); // wait 100ms HIGH); LOW); LOW); HIGH);

30 Driving AC Loads We can drive 120V AC loads using relays Relays are mechanical switches that can be switch by applying power to a secondary circuit WARNING : 120V AC current can kill! If you have not done this before consult with somebody who has experience!
31 Building Your Objects A great way to explore the mechanical side of your objects are construction sets like LEGO Erector/Meccano sets Another way is to hack old toys Ebay is a great place to shop for these things
32 Things to do for next Week Design your interactive Object(s) Briefly describe the behavior input/output Conversation Loop Sketch your overall design Layout the hardware Design the Sketch Bring this all to the next Workshop
Learning Objectives. References 10/26/11. Using servos with an Arduino. EAS 199A Fall 2011
 Using servos with an Arduino EAS 199A Fall 2011 Learning Objectives Be able to identify characteristics that distinguish a servo and a DC motor Be able to describe the difference a conventional servo and
Using servos with an Arduino EAS 199A Fall 2011 Learning Objectives Be able to identify characteristics that distinguish a servo and a DC motor Be able to describe the difference a conventional servo and
Using Servos with an Arduino
 Using Servos with an Arduino ME 120 Mechanical and Materials Engineering Portland State University http://web.cecs.pdx.edu/~me120 Learning Objectives Be able to identify characteristics that distinguish
Using Servos with an Arduino ME 120 Mechanical and Materials Engineering Portland State University http://web.cecs.pdx.edu/~me120 Learning Objectives Be able to identify characteristics that distinguish
100UF CAPACITOR POTENTIOMETER SERVO MOTOR MOTOR ARM. MALE HEADER PIN (3 pins) INGREDIENTS
 INGREDIENTS") 05 POTENTIOMETER SERVO MOTOR MOTOR ARM 100UF CAPACITOR MALE HEADER PIN (3 pins) INGREDIENTS 63 MOOD CUE USE A SERVO MOTOR TO MAKE A MECHANICAL GAUGE TO POINT OUT WHAT SORT OF MOOD YOU RE IN THAT DAY Discover:
05 POTENTIOMETER SERVO MOTOR MOTOR ARM 100UF CAPACITOR MALE HEADER PIN (3 pins) INGREDIENTS 63 MOOD CUE USE A SERVO MOTOR TO MAKE A MECHANICAL GAUGE TO POINT OUT WHAT SORT OF MOOD YOU RE IN THAT DAY Discover:
Lecture 6. Interfacing Digital and Analog Devices to Arduino. Intro to Arduino
 Lecture 6 Interfacing Digital and Analog Devices to Arduino. Intro to Arduino PWR IN USB (to Computer) RESET SCL\SDA (I2C Bus) POWER 5V / 3.3V / GND Analog INPUTS Digital I\O PWM(3, 5, 6, 9, 10, 11) Components
Lecture 6 Interfacing Digital and Analog Devices to Arduino. Intro to Arduino PWR IN USB (to Computer) RESET SCL\SDA (I2C Bus) POWER 5V / 3.3V / GND Analog INPUTS Digital I\O PWM(3, 5, 6, 9, 10, 11) Components
Assignments from last week
 Assignments from last week Review LED flasher kits Review protoshields Need more soldering practice (see below)? http://www.allelectronics.com/make-a-store/category/305/kits/1.html http://www.mpja.com/departments.asp?dept=61
Assignments from last week Review LED flasher kits Review protoshields Need more soldering practice (see below)? http://www.allelectronics.com/make-a-store/category/305/kits/1.html http://www.mpja.com/departments.asp?dept=61
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators
 Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Arduino Digital Out_QUICK RECAP
 Arduino Digital Out_QUICK RECAP BLINK File> Examples>Digital>Blink int ledpin = 13; // LED connected to digital pin 13 // The setup() method runs once, when the sketch starts void setup() // initialize
Arduino Digital Out_QUICK RECAP BLINK File> Examples>Digital>Blink int ledpin = 13; // LED connected to digital pin 13 // The setup() method runs once, when the sketch starts void setup() // initialize
HAW-Arduino. Sensors and Arduino F. Schubert HAW - Arduino 1
 HAW-Arduino Sensors and Arduino 14.10.2010 F. Schubert HAW - Arduino 1 Content of the USB-Stick PDF-File of this script Arduino-software Source-codes Helpful links 14.10.2010 HAW - Arduino 2 Report for
HAW-Arduino Sensors and Arduino 14.10.2010 F. Schubert HAW - Arduino 1 Content of the USB-Stick PDF-File of this script Arduino-software Source-codes Helpful links 14.10.2010 HAW - Arduino 2 Report for
Design with Microprocessors Year III Computer Science 1-st Semester
 Design with Microprocessors Year III Computer Science 1-st Semester Lecture 9: Microcontroller based applications: usage of sensors and actuators (motors) DC motor control Diligent MT motor/gearbox 1/19
Design with Microprocessors Year III Computer Science 1-st Semester Lecture 9: Microcontroller based applications: usage of sensors and actuators (motors) DC motor control Diligent MT motor/gearbox 1/19
Using Transistors and Driving Motors
 Chapter 4 Using Transistors and Driving Motors Parts You ll Need for This Chapter: Arduino Uno USB cable 9V battery 9V battery clip 5V L4940V5 linear regulator 22uF electrolytic capacitor.1uf electrolytic
Chapter 4 Using Transistors and Driving Motors Parts You ll Need for This Chapter: Arduino Uno USB cable 9V battery 9V battery clip 5V L4940V5 linear regulator 22uF electrolytic capacitor.1uf electrolytic
Disclaimer. Arduino Hands-On 2 CS5968 / ART4455 9/1/10. ! Many of these slides are mine. ! But, some are stolen from various places on the web
 Arduino Hands-On 2 CS5968 / ART4455 Disclaimer! Many of these slides are mine! But, some are stolen from various places on the web! todbot.com Bionic Arduino and Spooky Arduino class notes from Tod E.Kurt!
Arduino Hands-On 2 CS5968 / ART4455 Disclaimer! Many of these slides are mine! But, some are stolen from various places on the web! todbot.com Bionic Arduino and Spooky Arduino class notes from Tod E.Kurt!
Programming a Servo. Servo. Red Wire. Black Wire. White Wire
 Programming a Servo Learn to connect wires and write code to program a Servo motor. If you have gone through the LED Circuit and LED Blink exercises, you are ready to move on to programming a Servo. A
Programming a Servo Learn to connect wires and write code to program a Servo motor. If you have gone through the LED Circuit and LED Blink exercises, you are ready to move on to programming a Servo. A
ABCs of Arduino. Kurt Turchan -
 ABCs of Arduino Kurt Turchan - kurt@trailpeak.com Bio: Kurt is a web designer (java/php/ui-jquery), project manager, instructor (PHP/HTML/...), and arduino enthusiast, Kurt is founder of www.trailpeak.com
ABCs of Arduino Kurt Turchan - kurt@trailpeak.com Bio: Kurt is a web designer (java/php/ui-jquery), project manager, instructor (PHP/HTML/...), and arduino enthusiast, Kurt is founder of www.trailpeak.com
LED + Servo 2 devices, 1 Arduino
 LED + Servo 2 devices, 1 Arduino Learn to connect and write code to control both a Servo and an LED at the same time. Many students who come through the lab ask if they can use both an LED and a Servo
LED + Servo 2 devices, 1 Arduino Learn to connect and write code to control both a Servo and an LED at the same time. Many students who come through the lab ask if they can use both an LED and a Servo
Servo Sweep. Learn to make a regular Servo move in a sweeping motion.
 Servo Sweep Learn to make a regular Servo move in a sweeping motion. We have seen how to control a Servo and also how to make an LED Fade on and off. This activity will teach you how to make a regular
Servo Sweep Learn to make a regular Servo move in a sweeping motion. We have seen how to control a Servo and also how to make an LED Fade on and off. This activity will teach you how to make a regular
Yihao Qian Team A: Aware Teammates: Amit Agarwal Harry Golash Menghan Zhang Zihao (Theo) Zhang ILR01 Oct.14, 2016
 Zhang ILR01 Oct.14, 2016") Yihao Qian Team A: Aware Teammates: Amit Agarwal Harry Golash Menghan Zhang Zihao (Theo) Zhang ILR01 Oct.14, 2016 Individual Progress For sensors and motors lab, I was in charge of the servo and force
Yihao Qian Team A: Aware Teammates: Amit Agarwal Harry Golash Menghan Zhang Zihao (Theo) Zhang ILR01 Oct.14, 2016 Individual Progress For sensors and motors lab, I was in charge of the servo and force
DC motor control using arduino
 DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
Operating Mode: Serial; (PWM) passive control mode; Autonomous Mode; On/OFF Mode
 passive control mode; Autonomous Mode; On/OFF Mode") RB-Dfr-11 DFRobot URM V3.2 Ultrasonic Sensor URM37 V3.2 Ultrasonic Sensor uses an industrial level AVR processor as the main processing unit. It comes with a temperature correction which is very unique
RB-Dfr-11 DFRobot URM V3.2 Ultrasonic Sensor URM37 V3.2 Ultrasonic Sensor uses an industrial level AVR processor as the main processing unit. It comes with a temperature correction which is very unique
Project 27 Joystick Servo Control
 Project 27 Joystick Servo Control For another simple project, let s use a joystick to control the two servos. You ll arrange the servos in such a way that you get a pan-tilt head, such as is used for CCTV
Project 27 Joystick Servo Control For another simple project, let s use a joystick to control the two servos. You ll arrange the servos in such a way that you get a pan-tilt head, such as is used for CCTV
Analog Feedback Servos
 Analog Feedback Servos Created by Bill Earl Last updated on 2018-01-21 07:07:32 PM UTC Guide Contents Guide Contents About Servos and Feedback What is a Servo? Open and Closed Loops Using Feedback Reading
Analog Feedback Servos Created by Bill Earl Last updated on 2018-01-21 07:07:32 PM UTC Guide Contents Guide Contents About Servos and Feedback What is a Servo? Open and Closed Loops Using Feedback Reading
Arduino Application: Speed control of small DC Motors
 Arduino Application: Speed control of small DC Motors ME 120 Mechanical and Materials Engineering Portland State University http://web.cecs.pdx.edu/~me120 Learning Objectives Be able to describe the use
Arduino Application: Speed control of small DC Motors ME 120 Mechanical and Materials Engineering Portland State University http://web.cecs.pdx.edu/~me120 Learning Objectives Be able to describe the use
Robotic Arm Assembly Instructions
 Robotic Arm Assembly Instructions Last Revised: 11 January 2017 Part A: First follow the instructions: http://www.robotshop.com/media/files/zip2/rbmea-02_-_documentation_1.zip While assembling the servos:
Robotic Arm Assembly Instructions Last Revised: 11 January 2017 Part A: First follow the instructions: http://www.robotshop.com/media/files/zip2/rbmea-02_-_documentation_1.zip While assembling the servos:
URM37 V3.2 Ultrasonic Sensor (SKU:SEN0001)
") URM37 V3.2 Ultrasonic Sensor (SKU:SEN0001) From Robot Wiki Contents 1 Introduction 2 Specification 2.1 Compare with other ultrasonic sensor 3 Hardware requierments 4 Tools used 5 Software 6 Working Mode
URM37 V3.2 Ultrasonic Sensor (SKU:SEN0001) From Robot Wiki Contents 1 Introduction 2 Specification 2.1 Compare with other ultrasonic sensor 3 Hardware requierments 4 Tools used 5 Software 6 Working Mode
Lab 06: Ohm s Law and Servo Motor Control
 CS281: Computer Systems Lab 06: Ohm s Law and Servo Motor Control The main purpose of this lab is to build a servo motor control circuit. As with prior labs, there will be some exploratory sections designed
CS281: Computer Systems Lab 06: Ohm s Law and Servo Motor Control The main purpose of this lab is to build a servo motor control circuit. As with prior labs, there will be some exploratory sections designed
Computational Crafting with Arduino. Christopher Michaud Marist School ECEP Programs, Georgia Tech
 Computational Crafting with Arduino Christopher Michaud Marist School ECEP Programs, Georgia Tech Introduction What do you want to learn and do today? Goals with Arduino / Computational Crafting Purpose
Computational Crafting with Arduino Christopher Michaud Marist School ECEP Programs, Georgia Tech Introduction What do you want to learn and do today? Goals with Arduino / Computational Crafting Purpose
Basics before Migtrating to Arduino
 Basics before Migtrating to Arduino Who is this for? Written by Storming Robots Last update: Oct 11 th, 2013 This document is meant for preparing students who have already good amount of programming knowledge,
Basics before Migtrating to Arduino Who is this for? Written by Storming Robots Last update: Oct 11 th, 2013 This document is meant for preparing students who have already good amount of programming knowledge,
Programming 2 Servos. Learn to connect and write code to control two servos.
 Programming 2 Servos Learn to connect and write code to control two servos. Many students who visit the lab and learn how to use a Servo want to use 2 Servos in their project rather than just 1. This lesson
Programming 2 Servos Learn to connect and write code to control two servos. Many students who visit the lab and learn how to use a Servo want to use 2 Servos in their project rather than just 1. This lesson
keyestudio keyestudio Mini Tank Robot
 keyestudio Mini Tank Robot Catalog 1. Introduction... 1 2. Parameters... 1 3. Component list... 1 4. Application of Arduino... 2 5. Project details... 12 Project 1: Obstacle-avoidance Tank... 12 Project
keyestudio Mini Tank Robot Catalog 1. Introduction... 1 2. Parameters... 1 3. Component list... 1 4. Application of Arduino... 2 5. Project details... 12 Project 1: Obstacle-avoidance Tank... 12 Project
Coding with Arduino to operate the prosthetic arm
 Setup Board Install FTDI Drivers This is so that your RedBoard will be able to communicate with your computer. If you have Windows 8 or above you might already have the drivers. 1. Download the FTDI driver
Setup Board Install FTDI Drivers This is so that your RedBoard will be able to communicate with your computer. If you have Windows 8 or above you might already have the drivers. 1. Download the FTDI driver
Introduction: Components used:
 Introduction: As, this robotic arm is automatic in a way that it can decides where to move and when to move, therefore it works in a closed loop system where sensor detects if there is any object in a
Introduction: As, this robotic arm is automatic in a way that it can decides where to move and when to move, therefore it works in a closed loop system where sensor detects if there is any object in a
FABO ACADEMY X ELECTRONIC DESIGN
 ELECTRONIC DESIGN MAKE A DEVICE WITH INPUT & OUTPUT The Shanghaino can be programmed to use many input and output devices (a motor, a light sensor, etc) uploading an instruction code (a program) to it
ELECTRONIC DESIGN MAKE A DEVICE WITH INPUT & OUTPUT The Shanghaino can be programmed to use many input and output devices (a motor, a light sensor, etc) uploading an instruction code (a program) to it
Experiment#6: Speaker Control
 Experiment#6: Speaker Control I. Objectives 1. Describe the operation of the driving circuit for SP1 speaker. II. Circuit Description The circuit of speaker and driver is shown in figure# 1 below. The
Experiment#6: Speaker Control I. Objectives 1. Describe the operation of the driving circuit for SP1 speaker. II. Circuit Description The circuit of speaker and driver is shown in figure# 1 below. The
Sidekick Basic Kit for Arduino V2 Introduction
 Sidekick Basic Kit for Arduino V2 Introduction The Arduino Sidekick Basic Kit is designed to be used with your Arduino / Seeeduino / Seeeduino ADK / Maple Lilypad or any MCU board. It contains everything
Sidekick Basic Kit for Arduino V2 Introduction The Arduino Sidekick Basic Kit is designed to be used with your Arduino / Seeeduino / Seeeduino ADK / Maple Lilypad or any MCU board. It contains everything
CONSTRUCTION GUIDE Robotic Arm. Robobox. Level II
 CONSTRUCTION GUIDE Robotic Arm Robobox Level II Robotic Arm This month s robot is a robotic arm with two degrees of freedom that will teach you how to use motors. You will then be able to move the arm
CONSTRUCTION GUIDE Robotic Arm Robobox Level II Robotic Arm This month s robot is a robotic arm with two degrees of freedom that will teach you how to use motors. You will then be able to move the arm
4WD Mobile Platform SKU:ROB0022
 4WD Mobile Platform SKU:ROB0022 Contents [hide] 1 Function Introduction 1.1 STEP1: Assemble Robot 1.2 STEP2: Debug Motor 1.3 STEP3:Install Upper Plate 1.4 STEP4: Debug Ultrasonic Sensor and Servo 1.5 STEP5:
4WD Mobile Platform SKU:ROB0022 Contents [hide] 1 Function Introduction 1.1 STEP1: Assemble Robot 1.2 STEP2: Debug Motor 1.3 STEP3:Install Upper Plate 1.4 STEP4: Debug Ultrasonic Sensor and Servo 1.5 STEP5:
Motors and Servos Part 2: DC Motors
 Motors and Servos Part 2: DC Motors Back to Motors After a brief excursion into serial communication last week, we are returning to DC motors this week. As you recall, we have already worked with servos
Motors and Servos Part 2: DC Motors Back to Motors After a brief excursion into serial communication last week, we are returning to DC motors this week. As you recall, we have already worked with servos
Arduino: Sensors for Fun and Non Profit
 Arduino: Sensors for Fun and Non Profit Slides and Programs: http://pamplin.com/dms/ Nicholas Webb DMS: @NickWebb 1 Arduino: Sensors for Fun and Non Profit Slides and Programs: http://pamplin.com/dms/
Arduino: Sensors for Fun and Non Profit Slides and Programs: http://pamplin.com/dms/ Nicholas Webb DMS: @NickWebb 1 Arduino: Sensors for Fun and Non Profit Slides and Programs: http://pamplin.com/dms/
About Arduino: About keyestudio:
 About Arduino: Arduino is an open-source hardware project platform. This platform includes a circuit board with simple I/O function and program development environment software. It can be used to develop
About Arduino: Arduino is an open-source hardware project platform. This platform includes a circuit board with simple I/O function and program development environment software. It can be used to develop
Assembly Language. Topic 14 Motion Control. Stepper and Servo Motors
 Assembly Language Topic 14 Motion Control Stepper and Servo Motors Objectives To gain an understanding of the operation of a stepper motor To develop a means to control a stepper motor To gain an understanding
Assembly Language Topic 14 Motion Control Stepper and Servo Motors Objectives To gain an understanding of the operation of a stepper motor To develop a means to control a stepper motor To gain an understanding
Arduino Control of Tetrix Prizm Robotics. Motors and Servos Introduction to Robotics and Engineering Marist School
 Arduino Control of Tetrix Prizm Robotics Motors and Servos Introduction to Robotics and Engineering Marist School Motor or Servo? Motor Faster revolution but less Power Tetrix 12 Volt DC motors have a
Arduino Control of Tetrix Prizm Robotics Motors and Servos Introduction to Robotics and Engineering Marist School Motor or Servo? Motor Faster revolution but less Power Tetrix 12 Volt DC motors have a
Arduino and Servo Motor
 Arduino and Servo Motor 1. Basics of the Arduino Board and Arduino a. Arduino is a mini computer that can input and output data using the digital and analog pins b. Arduino Shield: mounts on top of Arduino
Arduino and Servo Motor 1. Basics of the Arduino Board and Arduino a. Arduino is a mini computer that can input and output data using the digital and analog pins b. Arduino Shield: mounts on top of Arduino
Attribution Thank you to Arduino and SparkFun for open source access to reference materials.
 Attribution Thank you to Arduino and SparkFun for open source access to reference materials. Contents Parts Reference... 1 Installing Arduino... 7 Unit 1: LEDs, Resistors, & Buttons... 7 1.1 Blink (Hello
Attribution Thank you to Arduino and SparkFun for open source access to reference materials. Contents Parts Reference... 1 Installing Arduino... 7 Unit 1: LEDs, Resistors, & Buttons... 7 1.1 Blink (Hello
Controlling motors with Arduino and Processing
 Fabian Winkler Controlling motors with Arduino and Processing Today s workshop illustrates how to control two different types of motors with the Arduino board: DC motors and servo motors. Since we have
Fabian Winkler Controlling motors with Arduino and Processing Today s workshop illustrates how to control two different types of motors with the Arduino board: DC motors and servo motors. Since we have
Lesson4 Obstacle avoidance car
 Lesson4 Obstacle avoidance car 1 Points of this section The joy of learning, is not just know how to control your car, but also know how to protect your car. So, make you car far away from collision. Learning
Lesson4 Obstacle avoidance car 1 Points of this section The joy of learning, is not just know how to control your car, but also know how to protect your car. So, make you car far away from collision. Learning
Parts List. Robotic Arm segments ¼ inch screws Cable XBEE module or Wifi module
 Robotic Arm 1 Legal Stuff Stensat Group LLC assumes no responsibility and/or liability for the use of the kit and documentation. There is a 90 day warranty for the Sten-Bot kit against component defects.
Robotic Arm 1 Legal Stuff Stensat Group LLC assumes no responsibility and/or liability for the use of the kit and documentation. There is a 90 day warranty for the Sten-Bot kit against component defects.
SMART Funded by The National Science Foundation
 Lecture 5 Capacitors 1 Store electric charge Consists of two plates of a conducting material separated by a space filled by an insulator Measured in units called farads, F Capacitors 2 Mylar Ceramic Electrolytic
Lecture 5 Capacitors 1 Store electric charge Consists of two plates of a conducting material separated by a space filled by an insulator Measured in units called farads, F Capacitors 2 Mylar Ceramic Electrolytic
Understanding RC Servos and DC Motors
 Understanding RC Servos and DC Motors What You ll Learn How an RC servo and DC motor operate Understand the electrical and mechanical details How to interpret datasheet specifications and properly apply
Understanding RC Servos and DC Motors What You ll Learn How an RC servo and DC motor operate Understand the electrical and mechanical details How to interpret datasheet specifications and properly apply
PWM CONTROL USING ARDUINO. Learn to Control DC Motor Speed and LED Brightness
 PWM CONTROL USING ARDUINO Learn to Control DC Motor Speed and LED Brightness In this article we explain how to do PWM (Pulse Width Modulation) control using arduino. If you are new to electronics, we have
PWM CONTROL USING ARDUINO Learn to Control DC Motor Speed and LED Brightness In this article we explain how to do PWM (Pulse Width Modulation) control using arduino. If you are new to electronics, we have
.:Twisting:..:Potentiometers:.
 CIRC-08.:Twisting:..:Potentiometers:. WHAT WE RE DOING: Along with the digital pins, the also has 6 pins which can be used for analog input. These inputs take a voltage (from 0 to 5 volts) and convert
CIRC-08.:Twisting:..:Potentiometers:. WHAT WE RE DOING: Along with the digital pins, the also has 6 pins which can be used for analog input. These inputs take a voltage (from 0 to 5 volts) and convert
Training Schedule. Robotic System Design using Arduino Platform
 Training Schedule Robotic System Design using Arduino Platform Session - 1 Embedded System Design Basics : Scope : To introduce Embedded Systems hardware design fundamentals to students. Processor Selection
Training Schedule Robotic System Design using Arduino Platform Session - 1 Embedded System Design Basics : Scope : To introduce Embedded Systems hardware design fundamentals to students. Processor Selection
Advanced Mechatronics 1 st Mini Project. Remote Control Car. Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014
 Advanced Mechatronics 1 st Mini Project Remote Control Car Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014 Remote Control Car Manual Control with the remote and direction buttons Automatic
Advanced Mechatronics 1 st Mini Project Remote Control Car Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014 Remote Control Car Manual Control with the remote and direction buttons Automatic
Lab Exercise 9: Stepper and Servo Motors
 ME 3200 Mechatronics Laboratory Lab Exercise 9: Stepper and Servo Motors Introduction In this laboratory exercise, you will explore some of the properties of stepper and servomotors. These actuators are
ME 3200 Mechatronics Laboratory Lab Exercise 9: Stepper and Servo Motors Introduction In this laboratory exercise, you will explore some of the properties of stepper and servomotors. These actuators are
Arduino Advanced Projects
 Arduino Advanced Projects Created as a companion manual to the Toronto Public Library Arduino Kits. Arduino Advanced Projects Copyright 2017 Toronto Public Library. All rights reserved. Published by the
Arduino Advanced Projects Created as a companion manual to the Toronto Public Library Arduino Kits. Arduino Advanced Projects Copyright 2017 Toronto Public Library. All rights reserved. Published by the
EE 314 Spring 2003 Microprocessor Systems
 EE 314 Spring 2003 Microprocessor Systems Laboratory Project #9 Closed Loop Control Overview and Introduction This project will bring together several pieces of software and draw on knowledge gained in
EE 314 Spring 2003 Microprocessor Systems Laboratory Project #9 Closed Loop Control Overview and Introduction This project will bring together several pieces of software and draw on knowledge gained in
Analog Servo Drive 25A20DD
 Description Power Range NOTE: This product has been replaced by the AxCent family of servo drives. Please visit our website at www.a-m-c.com or contact us for replacement model information and retrofit
Description Power Range NOTE: This product has been replaced by the AxCent family of servo drives. Please visit our website at www.a-m-c.com or contact us for replacement model information and retrofit
.:Getting Started:..:(Blinking LED):.
:.") CIRC-01.:Getting Started:..:(Blinking LED):. WHAT WE RE DOING: LEDs (light emitting diodes) are used in all sorts of clever things which is why we have included them in this kit. We will start off with
CIRC-01.:Getting Started:..:(Blinking LED):. WHAT WE RE DOING: LEDs (light emitting diodes) are used in all sorts of clever things which is why we have included them in this kit. We will start off with
NAMASKAR ROBOT-WHICH PROVIDES SERVICE
 Int. J. Elec&Electr.Eng&Telecoms. 2014 V Sai Krishna and R Sunitha, 2014 Research Paper ISSN 2319 2518 www.ijeetc.com Vol. 3, No. 1, January 2014 2014 IJEETC. All Rights Reserved NAMASKAR ROBOT-WHICH PROVIDES
Int. J. Elec&Electr.Eng&Telecoms. 2014 V Sai Krishna and R Sunitha, 2014 Research Paper ISSN 2319 2518 www.ijeetc.com Vol. 3, No. 1, January 2014 2014 IJEETC. All Rights Reserved NAMASKAR ROBOT-WHICH PROVIDES
EE-110 Introduction to Engineering & Laboratory Experience Saeid Rahimi, Ph.D. Labs Introduction to Arduino
 EE-110 Introduction to Engineering & Laboratory Experience Saeid Rahimi, Ph.D. Labs 10-11 Introduction to Arduino In this lab we will introduce the idea of using a microcontroller as a tool for controlling
EE-110 Introduction to Engineering & Laboratory Experience Saeid Rahimi, Ph.D. Labs 10-11 Introduction to Arduino In this lab we will introduce the idea of using a microcontroller as a tool for controlling
Introduction to. An Open-Source Prototyping Platform. Hans-Petter Halvorsen
 Introduction to An Open-Source Prototyping Platform Hans-Petter Halvorsen Contents 1.Overview 2.Installation 3.Arduino Starter Kit 4.Arduino TinkerKit 5.Arduino Examples 6.LabVIEW Interface for Arduino
Introduction to An Open-Source Prototyping Platform Hans-Petter Halvorsen Contents 1.Overview 2.Installation 3.Arduino Starter Kit 4.Arduino TinkerKit 5.Arduino Examples 6.LabVIEW Interface for Arduino
THE IMPORTANCE OF PLANNING AND DRAWING IN DESIGN
 PROGRAM OF STUDY ENGR.ROB Standard 1 Essential UNDERSTAND THE IMPORTANCE OF PLANNING AND DRAWING IN DESIGN The student will understand and implement the use of hand sketches and computer-aided drawing
PROGRAM OF STUDY ENGR.ROB Standard 1 Essential UNDERSTAND THE IMPORTANCE OF PLANNING AND DRAWING IN DESIGN The student will understand and implement the use of hand sketches and computer-aided drawing
Total Hours Registration through Website or for further details please visit (Refer Upcoming Events Section)
") Total Hours 110-150 Registration Q R Code Registration through Website or for further details please visit http://www.rknec.edu/ (Refer Upcoming Events Section) Module 1: Basics of Microprocessor & Microcontroller
Total Hours 110-150 Registration Q R Code Registration through Website or for further details please visit http://www.rknec.edu/ (Refer Upcoming Events Section) Module 1: Basics of Microprocessor & Microcontroller
arduino experimentation kit Arduino Experimenter s Kit SketchBoard Edition
 ARDX arduino experimentation kit Arduino Experimenter s Kit SketchBoard Edition ARDX Open-Source Arduino Instruction Guide Document Revision: Nov 18 2015 A Few Words ABOUT THIS KIT The overall goal of
ARDX arduino experimentation kit Arduino Experimenter s Kit SketchBoard Edition ARDX Open-Source Arduino Instruction Guide Document Revision: Nov 18 2015 A Few Words ABOUT THIS KIT The overall goal of
Figure 1. Digilent DC Motor
 Laboratory 9 - Usage of DC- and servo-motors The current laboratory describes the usage of DC and servomotors 1. DC motors Figure 1. Digilent DC Motor Classical DC motors are converting electrical energy
Laboratory 9 - Usage of DC- and servo-motors The current laboratory describes the usage of DC and servomotors 1. DC motors Figure 1. Digilent DC Motor Classical DC motors are converting electrical energy
Arduino Programming Part 3
 Arduino Programming Part 3 EAS 199A Fall 2011 Overview Part I Circuits and code to control the speed of a small DC motor. Use potentiometer for dynamic user input. Use PWM output from Arduino to control
Arduino Programming Part 3 EAS 199A Fall 2011 Overview Part I Circuits and code to control the speed of a small DC motor. Use potentiometer for dynamic user input. Use PWM output from Arduino to control
J. La Favre Using Arduino with Raspberry Pi February 7, 2018
 As you have already discovered, the Raspberry Pi is a very capable digital device. Nevertheless, it does have some weaknesses. For example, it does not produce a clean pulse width modulation output (unless
As you have already discovered, the Raspberry Pi is a very capable digital device. Nevertheless, it does have some weaknesses. For example, it does not produce a clean pulse width modulation output (unless
FlareBot. Analysis of an Autonomous Robot. By: Sanat S. Sahasrabudhe Advisor: Professor John Seng
 FlareBot Analysis of an Autonomous Robot By: Sanat S. Sahasrabudhe Advisor: Professor John Seng Presented to: Computer Engineering, California Polytechnic State University June 2013 Introduction: In the
FlareBot Analysis of an Autonomous Robot By: Sanat S. Sahasrabudhe Advisor: Professor John Seng Presented to: Computer Engineering, California Polytechnic State University June 2013 Introduction: In the
BEYOND TOYS. Wireless sensor extension pack. Tom Frissen s
 LEGO BEYOND TOYS Wireless sensor extension pack Tom Frissen s040915 t.e.l.n.frissen@student.tue.nl December 2008 Faculty of Industrial Design Eindhoven University of Technology 1 2 TABLE OF CONTENT CLASS
LEGO BEYOND TOYS Wireless sensor extension pack Tom Frissen s040915 t.e.l.n.frissen@student.tue.nl December 2008 Faculty of Industrial Design Eindhoven University of Technology 1 2 TABLE OF CONTENT CLASS
Illustration 1: Wiper Motor Controller, Sensor, and optional programmer. DC Wiper Motor H-Bridge Servo / Speed Controller
 DeviceCraft Revision #2 4/13/2014 Illustration 1: Wiper Motor Controller, Sensor, and optional programmer DC Wiper Motor H-Bridge Servo / Speed Controller P/N 4900 Features: Powerfull servo or reversible
DeviceCraft Revision #2 4/13/2014 Illustration 1: Wiper Motor Controller, Sensor, and optional programmer DC Wiper Motor H-Bridge Servo / Speed Controller P/N 4900 Features: Powerfull servo or reversible
Citrus Circuits Fall Workshop Series. Roborio and Sensors. Paul Ngo and Ellie Hass
 Citrus Circuits Fall Workshop Series Roborio and Sensors Paul Ngo and Ellie Hass Introduction to Sensors Sensor: a device that detects or measures a physical property and records, indicates, or otherwise
Citrus Circuits Fall Workshop Series Roborio and Sensors Paul Ngo and Ellie Hass Introduction to Sensors Sensor: a device that detects or measures a physical property and records, indicates, or otherwise
Module: Arduino as Signal Generator
 Name/NetID: Teammate/NetID: Module: Laboratory Outline In our continuing quest to access the development and debugging capabilities of the equipment on your bench at home Arduino/RedBoard as signal generator.
Name/NetID: Teammate/NetID: Module: Laboratory Outline In our continuing quest to access the development and debugging capabilities of the equipment on your bench at home Arduino/RedBoard as signal generator.
The plan... CSE 6324 From control to actuators Michael Jenkin Office Hours: Sherman 1028 Wed 3-4. From the bottom up...
 The plan... CSE 6324 From control to actuators Michael Jenkin jenkin@cse.yorku.ca Office Hours: Sherman 1028 Wed 3-4 Lectures this week No class next week Start building the week after (i) Need to sort
The plan... CSE 6324 From control to actuators Michael Jenkin jenkin@cse.yorku.ca Office Hours: Sherman 1028 Wed 3-4 Lectures this week No class next week Start building the week after (i) Need to sort
Control Robotics Arm with EduCake
 Control Robotics Arm with EduCake 1. About Robotics Arm Robotics Arm (RobotArm) similar to the one in Figure-1, is used in broad range of industrial automation and manufacturing environment. This type
Control Robotics Arm with EduCake 1. About Robotics Arm Robotics Arm (RobotArm) similar to the one in Figure-1, is used in broad range of industrial automation and manufacturing environment. This type
Name & SID 1 : Name & SID 2:
 EE40 Final Project-1 Smart Car Name & SID 1 : Name & SID 2: Introduction The final project is to create an intelligent vehicle, better known as a robot. You will be provided with a chassis(motorized base),
EE40 Final Project-1 Smart Car Name & SID 1 : Name & SID 2: Introduction The final project is to create an intelligent vehicle, better known as a robot. You will be provided with a chassis(motorized base),
Interfacing dspace to the Quanser Rotary Series of Experiments (SRV02ET)
") Interfacing dspace to the Quanser Rotary Series of Experiments (SRV02ET) Nicanor Quijano and Kevin M. Passino The Ohio State University, Department of Electrical Engineering, 2015 Neil Avenue, Columbus
Interfacing dspace to the Quanser Rotary Series of Experiments (SRV02ET) Nicanor Quijano and Kevin M. Passino The Ohio State University, Department of Electrical Engineering, 2015 Neil Avenue, Columbus
Experimenter s Guide for Arduino
 ARDX experimentation kit for arduino Experimenter s Guide for Arduino (ARDX) A Few Words ABOUT THIS KIT The overall goal of this kit is fun. Beyond this, the aim is to get you comfortable using a wide
ARDX experimentation kit for arduino Experimenter s Guide for Arduino (ARDX) A Few Words ABOUT THIS KIT The overall goal of this kit is fun. Beyond this, the aim is to get you comfortable using a wide
HOW TO BUILD A CAR PARK WITH INTEL GALILEO!
 HOW TO BUILD A CAR PARK WITH INTEL GALILEO! A step by step tutorial to build, in a very simple way, a funny car park with automatic barrier and display counter with your Intel Galileo!» Recommended age
HOW TO BUILD A CAR PARK WITH INTEL GALILEO! A step by step tutorial to build, in a very simple way, a funny car park with automatic barrier and display counter with your Intel Galileo!» Recommended age
Sensor and. Motor Control Lab. Abhishek Bhatia. Individual Lab Report #1
 Sensor and 10/16/2015 Motor Control Lab Individual Lab Report #1 Abhishek Bhatia Team D: Team HARP (Human Assistive Robotic Picker) Teammates: Alex Brinkman, Feroze Naina, Lekha Mohan, Rick Shanor I. Individual
Sensor and 10/16/2015 Motor Control Lab Individual Lab Report #1 Abhishek Bhatia Team D: Team HARP (Human Assistive Robotic Picker) Teammates: Alex Brinkman, Feroze Naina, Lekha Mohan, Rick Shanor I. Individual
ECE 511: FINAL PROJECT REPORT GROUP 7 MSP430 TANK
 ECE 511: FINAL PROJECT REPORT GROUP 7 MSP430 TANK Team Members: Andrew Blanford Matthew Drummond Krishnaveni Das Dheeraj Reddy 1 Abstract: The goal of the project was to build an interactive and mobile
ECE 511: FINAL PROJECT REPORT GROUP 7 MSP430 TANK Team Members: Andrew Blanford Matthew Drummond Krishnaveni Das Dheeraj Reddy 1 Abstract: The goal of the project was to build an interactive and mobile
DC Motor and Servo motor Control with ARM and Arduino. Created by:
 DC Motor and Servo motor Control with ARM and Arduino Created by: Andrew Kaler (39345) Tucker Boyd (46434) Mohammed Chowdhury (860822) Tazwar Muttaqi (901700) Mark Murdock (98071) May 4th, 2017 Objective
DC Motor and Servo motor Control with ARM and Arduino Created by: Andrew Kaler (39345) Tucker Boyd (46434) Mohammed Chowdhury (860822) Tazwar Muttaqi (901700) Mark Murdock (98071) May 4th, 2017 Objective
Programming Design. ROBOTC Software
 Programming Design ROBOTC Software Behavior-Based Programming A behavior is anything your robot does Turning on a single motor or servo Three main types of behaviors 1. Complex behaviors Robot performs
Programming Design ROBOTC Software Behavior-Based Programming A behavior is anything your robot does Turning on a single motor or servo Three main types of behaviors 1. Complex behaviors Robot performs
CONSTRUCTION GUIDE IR Alarm. Robobox. Level I
 CONSTRUCTION GUIDE Robobox Level I This month s montage is an that will allow you to detect any intruder. When a movement is detected, the alarm will turn its LEDs on and buzz to a personalized tune. 1X
CONSTRUCTION GUIDE Robobox Level I This month s montage is an that will allow you to detect any intruder. When a movement is detected, the alarm will turn its LEDs on and buzz to a personalized tune. 1X
Project Proposal. Underwater Fish 02/16/2007 Nathan Smith,
 Project Proposal Underwater Fish 02/16/2007 Nathan Smith, rahteski@gwu.edu Abstract The purpose of this project is to build a mechanical, underwater fish that can be controlled by a joystick. The fish
Project Proposal Underwater Fish 02/16/2007 Nathan Smith, rahteski@gwu.edu Abstract The purpose of this project is to build a mechanical, underwater fish that can be controlled by a joystick. The fish
B RoboClaw 2 Channel 30A Motor Controller Data Sheet
 B0098 - RoboClaw 2 Channel 30A Motor Controller (c) 2010 BasicMicro. All Rights Reserved. Feature Overview: 2 Channel at 30Amp, Peak 60Amp Battery Elimination Circuit (BEC) Switching Mode BEC Hobby RC
B0098 - RoboClaw 2 Channel 30A Motor Controller (c) 2010 BasicMicro. All Rights Reserved. Feature Overview: 2 Channel at 30Amp, Peak 60Amp Battery Elimination Circuit (BEC) Switching Mode BEC Hobby RC
Haptic Feedback Technology
 Haptic Feedback Technology ECE480: Design Team 4 Application Note Michael Greene Abstract: With the daily interactions between humans and their surrounding technology growing exponentially, the development
Haptic Feedback Technology ECE480: Design Team 4 Application Note Michael Greene Abstract: With the daily interactions between humans and their surrounding technology growing exponentially, the development
Intro to Engineering II for ECE: Lab 3 Controlling Servo Motors Erin Webster and Dr. Jay Weitzen, c 2012 All rights reserved
 Lab 3: Controlling Servo Motors Laboratory Objectives: 1) To program the basic stamp to control the motion of a servo 2) To observe the control waveforms as the motion of the servo changes 3) To learn
Lab 3: Controlling Servo Motors Laboratory Objectives: 1) To program the basic stamp to control the motion of a servo 2) To observe the control waveforms as the motion of the servo changes 3) To learn
Lecture 4: Basic Electronics. Lecture 4 Brief Introduction to Electronics and the Arduino
 Lecture 4: Basic Electronics Lecture 4 Page: 1 Brief Introduction to Electronics and the Arduino colintan@nus.edu.sg Lecture 4: Basic Electronics Page: 2 Objectives of this Lecture By the end of today
Lecture 4: Basic Electronics Lecture 4 Page: 1 Brief Introduction to Electronics and the Arduino colintan@nus.edu.sg Lecture 4: Basic Electronics Page: 2 Objectives of this Lecture By the end of today
UNIVERSAL INPUT RESISTANCE OUTPUT
 UNIVERSAL INPUT RESISTANCE OUTPUT FEATURES Jumper selectable analog input DIP switch selectable pulse input type DIP switch selectable time bases 256 step output resolution Field changeable resistance
UNIVERSAL INPUT RESISTANCE OUTPUT FEATURES Jumper selectable analog input DIP switch selectable pulse input type DIP switch selectable time bases 256 step output resolution Field changeable resistance
E11 Lecture 11: Sensors & Actuators. Profs. David Money Harris & Sarah Harris Fall 2011
 E11 Lecture 11: Sensors & Actuators Profs. David Money Harris & Sarah Harris Fall 2011 Outline Actuators DC Motor Servo Motor Stepper Motor Sensors Phototransistor Reflectance Sensor IR Distance Sensor
E11 Lecture 11: Sensors & Actuators Profs. David Money Harris & Sarah Harris Fall 2011 Outline Actuators DC Motor Servo Motor Stepper Motor Sensors Phototransistor Reflectance Sensor IR Distance Sensor
2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control. October 5, 2009 Dr. Harrison H. Chin
 2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control October 5, 2009 Dr. Harrison H. Chin Formal Labs 1. Microcontrollers Introduction to microcontrollers Arduino microcontroller
2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control October 5, 2009 Dr. Harrison H. Chin Formal Labs 1. Microcontrollers Introduction to microcontrollers Arduino microcontroller
ARDUINO BASED GREETING CONTROLLED ROBOT
 ARDUINO BASED GREETING CONTROLLED ROBOT 1 Patil Tushar R, 2 Goad Prashant M., 3 Patil Jagdish B, 4 Bari Jayesh P 1,3,4 Students, 2 Professor Abstract: This paper introduces a service robot which performs
ARDUINO BASED GREETING CONTROLLED ROBOT 1 Patil Tushar R, 2 Goad Prashant M., 3 Patil Jagdish B, 4 Bari Jayesh P 1,3,4 Students, 2 Professor Abstract: This paper introduces a service robot which performs
1. Controlling the DC Motors
 E11: Autonomous Vehicles Lab 5: Motors and Sensors By this point, you should have an assembled robot and Mudduino to power it. Let s get things moving! In this lab, you will write code to test your motors
E11: Autonomous Vehicles Lab 5: Motors and Sensors By this point, you should have an assembled robot and Mudduino to power it. Let s get things moving! In this lab, you will write code to test your motors
A Model Based Approach for Human Recognition and Reception by Robot
 16 MHz ARDUINO A Model Based Approach for Human Recognition and Reception by Robot Prof. R. Sunitha Department Of ECE, N.R.I Institute Of Technology, J.N.T University, Kakinada, India. V. Sai Krishna,
16 MHz ARDUINO A Model Based Approach for Human Recognition and Reception by Robot Prof. R. Sunitha Department Of ECE, N.R.I Institute Of Technology, J.N.T University, Kakinada, India. V. Sai Krishna,
Setup Download the Arduino library (link) for Processing and the Lab 12 sketches (link).
 for Processing and the Lab 12 sketches (link).") Lab 12 Connecting Processing and Arduino Overview In the previous lab we have examined how to connect various sensors to the Arduino using Scratch. While Scratch enables us to make simple Arduino programs,
Lab 12 Connecting Processing and Arduino Overview In the previous lab we have examined how to connect various sensors to the Arduino using Scratch. While Scratch enables us to make simple Arduino programs,
Introduction to the VEX Robotics Platform and ROBOTC Software
 Introduction to the VEX Robotics Platform and ROBOTC Software Computer Integrated Manufacturing 2013 Project Lead The Way, Inc. VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem
Introduction to the VEX Robotics Platform and ROBOTC Software Computer Integrated Manufacturing 2013 Project Lead The Way, Inc. VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem
Feed-back loop. open-loop. closed-loop
 Servos AJLONTECH Overview Servo motors are used for angular positioning, such as in radio control airplanes. They typically have a movement range of 180 deg but can go up to 210 deg. The output shaft of
Servos AJLONTECH Overview Servo motors are used for angular positioning, such as in radio control airplanes. They typically have a movement range of 180 deg but can go up to 210 deg. The output shaft of
A servo is an electric motor that takes in a pulse width modulated signal that controls direction and speed. A servo has three leads:
 Project 4: Arduino Servos Part 1 Description: A servo is an electric motor that takes in a pulse width modulated signal that controls direction and speed. A servo has three leads: a. Red: Current b. Black:
Project 4: Arduino Servos Part 1 Description: A servo is an electric motor that takes in a pulse width modulated signal that controls direction and speed. A servo has three leads: a. Red: Current b. Black:
Counter/Timers in the Mega8
 Counter/Timers in the Mega8 The mega8 incorporates three counter/timer devices. These can: Be used to count the number of events that have occurred (either external or internal) Act as a clock Trigger
Counter/Timers in the Mega8 The mega8 incorporates three counter/timer devices. These can: Be used to count the number of events that have occurred (either external or internal) Act as a clock Trigger
EEE3410 Microcontroller Applications Department of Electrical Engineering Lecture 11 Motor Control
 EEE34 Microcontroller Applications Department of Electrical Engineering Lecture Motor Control Week 3 EEE34 Microcontroller Applications In this Lecture. Interface 85 with the following output Devices Optoisolator
EEE34 Microcontroller Applications Department of Electrical Engineering Lecture Motor Control Week 3 EEE34 Microcontroller Applications In this Lecture. Interface 85 with the following output Devices Optoisolator
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
1. Introduction to Analog I/O
 EduCake Analog I/O Intro 1. Introduction to Analog I/O In previous chapter, we introduced the 86Duino EduCake, talked about EduCake s I/O features and specification, the development IDE and multiple examples
EduCake Analog I/O Intro 1. Introduction to Analog I/O In previous chapter, we introduced the 86Duino EduCake, talked about EduCake s I/O features and specification, the development IDE and multiple examples