Trust and Interaction in Industrial Human-Robot Collaborative applications
|
|
|
- Diane Harrington
- 5 years ago
- Views:
Transcription


1 Trust and Interaction in Industrial Human-Robot Collaborative applications Iñaki Maurtua IK4-TEKNIKER This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No







2 Highly customizable robotic solutions for effective and safe human robot collaboration in manufacturing applications FourByThree proposes the development of a new generation of modular industrial robotic solutions that are suitable for efficient task execution in collaboration with humans in a safe way and are easy to use and program by the factory worker 3 Industrial settings + 1 Permanent lab Welding, assembling, riveting, machine tending FOURBYTHREE has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement nº

3 CONTEXT: X-ACT Expert cooperative robots for highly skilled operations for the factory of the future Dual-arm based fenceless disassembly cell Disassembly of electrical appliances No fixtures High flexibility 2015/10/02 IROS2015, Hamburg 3

4 CONTEXT: SMERobotics The European Robotics Initiative for Strengthening the Competitiveness of SMEs in manufacturing by Integrating aspects of Cognitive Systems FLEXAS: Aeronautic components assembly using flexible dual-arm robotic in close collaboration with human operators 2015/10/02 IROS2015, Hamburg 4


5 CONTEXT: Need of collaboration X-ACT SMERobotics 2015/10/02 IROS2015, Hamburg 5











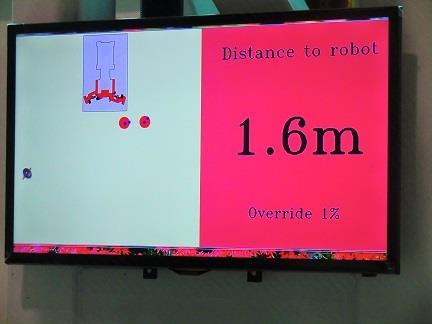
6 CONTEXT: Safety Strategy SafetyEYE Human Detection and tracking SSM Other Means Safety devices Feedback Working procedure SafetyEYE 2015/10/02 IROS2015, Hamburg 6


7 CONTEXT: Interaction mechanisms Pushbutton Voice based Gestures Implicit 2015/10/02 IROS2015, Hamburg 7
8 EXPERIMENT: Objective Safety. How do workers perceive the safety aspects when working in the vicinity of an industrial robot without physical barriers Interaction. What is the workers feedback about different interaction mechanisms? How do they influence the level of trust? 2015/10/02 IROS2015, Hamburg 8

9 EXPERIMENT: Overview 17 workers Experience: 16 industrial, 6 working with robots Knowledge about accidents: 11 machinery, 4 robots 2015/10/02 IROS2015, Hamburg 9


10 EXPERIMENT: Task (1) 5 Iterations per session 4 according to experimenter s request Voice, gesture, button, implicit 5 th free choice 2015/10/02 IROS2015, Hamburg 10

11 EXPERIMENT: Task (2) Non programed entrance into the working space of the robot The worker had to take an object from the workbench The robot was moving at high speed 2015/10/02 IROS2015, Hamburg 11
12 RESULTS: Interaction-General Standard pushbutton is the preferred option 38% Gestures 26% and voice 21%. Implicit 15% It is the only one that did not confuse the participants Feedback on command recognition is suggested by 41% of participants Lighting (41%) and screen message ( 35%) Speech (12%) or sound (18%) 100% considered the system easy (35%) or very easy (65%) to use 2015/10/02 IROS2015, Hamburg 12
13 RESULTS: Interaction-Screen Only 2 participants complaint about the position of the screen. But it should be considered (worker height and possible occlusions) 71% of the participants would appreciate a task guiding message on the screen 6% feel the screen distracting 64% paid attention always vs 6% that did not pay attention ever Most participants (82%) considered that the information on the screen contributed to do the task safer 10 knew HMD: 7 thought they could be useful 2015/10/02 IROS2015, Hamburg 13
14 RESULTS: Interaction-Voice 2 participants felt ridiculous using voice commands 59% participants preferred predefined commands instead of natural language (1 participant) Only one participant doubt about the Command to be used (second session) But in case of having more commands 65% considered a possible source of confusion 24% shouted 2015/10/02 IROS2015, Hamburg 14
15 RESULTS: Interaction-Gestures Nobody felt ridiculous The number of participants that thought that gestures can be confusing increased from the first session to the second (2 / 4) Only 2 gestures In case of having more commands 76% considered a possible source of confusion 2015/10/02 IROS2015, Hamburg 15
16 RESULTS: Interaction-Implicit 18% felt that they lost control Only 3 participants would like this form of interaction 53% doubt whether the robot had identified the end of the task or not 2015/10/02 IROS2015, Hamburg 16
17 RESULTS: Interaction-Sound The beep sound used to warn the approach to the risky zone was not considered annoying (100%) It was considered helpful even in the collaboration area (very low speed) by 71% 2015/10/02 IROS2015, Hamburg 17
18 RESULTS: Safety After the experiment 53% felt that their perception on safety had improved 76% felt completely safe; 24% felt safe The marks on the floor The Warning zone was appreciated by most participants (82%) The collaborative zone was appreciated by 24% (35% placed inside it during the collaboration) All safety measures contributed in a similar way to the safety perception 2015/10/02 IROS2015, Hamburg 18
19 RESULTS: Safety An emergency pushbutton would be convenient (53%) or should be mandatory (47%) The interlock key would be convenient (53%) or should be mandatory (47%) In the experiment: (29% / 18%) used it and took the key (18% / 18%) used it but they didn t remove it (53% / 65%) did not use it The interlock key would be used always by 18% of the participants 2015/10/02 IROS2015, Hamburg 19
20 RESULTS: Safety The pose during collaboration was appreciated by most participants (65%) The metallic nature and overhead position was not considered relevant 41% would prefer an smaller robot Perception on robot speed changed from 1 st to 2 nd session 24% / 41% too slow 65% / 47% slow (it contributed to feel safer even if it is slow) 12% / 12% considered it right 7 participants suggested the use of a helmet 2015/10/02 IROS2015, Hamburg 20
21 RESULTS: Safety In case of collision the robot should stop immediately (100%) Instead of moving in the opposite direction In case of collision nobody considered that a serious injury might happen 29% started the task even before the robot finished the part turning 29% moved back before the robot start turning 2015/10/02 IROS2015, Hamburg 21


22 Good news! I wouldn't like but I would accept 6% I wouldn't accept 6% Fenceless HRC I wouldn't mind 88% 2015/10/02 IROS2015, Hamburg 22

23 FourByThree Safety strategy SSM (different technologies) Force and Torque monitoring Variable stiffness Multichannel input Voice, gestures, remote control Projection system Virtual buttons Guiding information Manual guidance 2015/10/02 IROS2015, Hamburg 23
24 More information: Iñaki Maurtua: 2015/10/02 IROS2015, Hamburg 24
ROBO-PARTNER: Safe human-robot collaboration for assembly: case studies and challenges
 ROBO-PARTNER: Safe human-robot collaboration for assembly: case studies and challenges Dr. George Michalos University of Patras ROBOT FORUM ASSEMBLY 16 March 2016 Parma, Italy Introduction Human sensitivity
ROBO-PARTNER: Safe human-robot collaboration for assembly: case studies and challenges Dr. George Michalos University of Patras ROBOT FORUM ASSEMBLY 16 March 2016 Parma, Italy Introduction Human sensitivity
Theme 2: The new paradigm in robotics safety
 Competitiveness in Emerging Robot Technologies (CEROBOT) The opportunities in safety and robots for SMEs Theme 2: The new paradigm in robotics safety Colin Blackman Simon Forge SCF Associates Ltd Safety
Competitiveness in Emerging Robot Technologies (CEROBOT) The opportunities in safety and robots for SMEs Theme 2: The new paradigm in robotics safety Colin Blackman Simon Forge SCF Associates Ltd Safety
Machine Vision for Collaborative Robot Applications. David L. Dechow FANUC America Corporation
 Machine Vision for Collaborative Robot Applications David L. Dechow FANUC America Corporation Topics Overview of collaborative robot technologies The roles for machine vision It s still machine vision
Machine Vision for Collaborative Robot Applications David L. Dechow FANUC America Corporation Topics Overview of collaborative robot technologies The roles for machine vision It s still machine vision
Expert cooperative robots for highly skilled operations for the factory of the future
 Expert cooperative robots for highly skilled operations for the factory of the future Grant Agreement No : 314355 Project Acronym : X-act Project Start Date : 1st October, 2012 Consortium : UNIVERSITY
Expert cooperative robots for highly skilled operations for the factory of the future Grant Agreement No : 314355 Project Acronym : X-act Project Start Date : 1st October, 2012 Consortium : UNIVERSITY
Towards Intuitive Industrial Human-Robot Collaboration
 Towards Intuitive Industrial Human-Robot Collaboration System Design and Future Directions Ferdinand Fuhrmann, Wolfgang Weiß, Lucas Paletta, Bernhard Reiterer, Andreas Schlotzhauer, Mathias Brandstötter
Towards Intuitive Industrial Human-Robot Collaboration System Design and Future Directions Ferdinand Fuhrmann, Wolfgang Weiß, Lucas Paletta, Bernhard Reiterer, Andreas Schlotzhauer, Mathias Brandstötter
How To Create The Right Collaborative System For Your Application. Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation
 How To Create The Right Collaborative System For Your Application Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation C Definitions Cobot: for this presentation a robot specifically designed
How To Create The Right Collaborative System For Your Application Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation C Definitions Cobot: for this presentation a robot specifically designed
Safe Human-Robot Co-Existence
 Safe Human-Robot Co-Existence Aaron Pereira TU München February 3, 2016 Aaron Pereira Preliminary Lecture February 3, 2016 1 / 17 Overview Course Aim (Learning Outcomes) You understand the challenges behind
Safe Human-Robot Co-Existence Aaron Pereira TU München February 3, 2016 Aaron Pereira Preliminary Lecture February 3, 2016 1 / 17 Overview Course Aim (Learning Outcomes) You understand the challenges behind
WorldDAB Automotive DAB Digital Radio In Car User Experience Design Guidelines
 WorldDAB Automotive DAB Digital Radio In Car User Experience Design Guidelines 1. Background a) WorldDAB b) Radio in-car c) UX Group 2. WorldDAB in-car DAB user experience research 3. Consumer use cases
WorldDAB Automotive DAB Digital Radio In Car User Experience Design Guidelines 1. Background a) WorldDAB b) Radio in-car c) UX Group 2. WorldDAB in-car DAB user experience research 3. Consumer use cases
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
H2020 RIA COMANOID H2020-RIA
 Ref. Ares(2016)2533586-01/06/2016 H2020 RIA COMANOID H2020-RIA-645097 Deliverable D4.1: Demonstrator specification report M6 D4.1 H2020-RIA-645097 COMANOID M6 Project acronym: Project full title: COMANOID
Ref. Ares(2016)2533586-01/06/2016 H2020 RIA COMANOID H2020-RIA-645097 Deliverable D4.1: Demonstrator specification report M6 D4.1 H2020-RIA-645097 COMANOID M6 Project acronym: Project full title: COMANOID
Human-like Assembly Robots in Factories
 5-88 June Symposium on Japan America Frontier of Engineering (JAFOE) Robotics Session: Human-like Assembly Robots in Factories 8th June Robotics Technology R&D Group Shingo Ando 0520 Introduction: Overview
5-88 June Symposium on Japan America Frontier of Engineering (JAFOE) Robotics Session: Human-like Assembly Robots in Factories 8th June Robotics Technology R&D Group Shingo Ando 0520 Introduction: Overview
HandsIn3D: Supporting Remote Guidance with Immersive Virtual Environments
 HandsIn3D: Supporting Remote Guidance with Immersive Virtual Environments Weidong Huang 1, Leila Alem 1, and Franco Tecchia 2 1 CSIRO, Australia 2 PERCRO - Scuola Superiore Sant Anna, Italy {Tony.Huang,Leila.Alem}@csiro.au,
HandsIn3D: Supporting Remote Guidance with Immersive Virtual Environments Weidong Huang 1, Leila Alem 1, and Franco Tecchia 2 1 CSIRO, Australia 2 PERCRO - Scuola Superiore Sant Anna, Italy {Tony.Huang,Leila.Alem}@csiro.au,
POWER TRACE TM TASCO, INC.
 POWER TRACE TM Instruction Manual PTL610 TASCO, INC. HOW YOUR POWER TRACE TM OPERATES The Power Trace TM is composed of two primary components: the Receiver and the Transmitter. When the Transmitter is
POWER TRACE TM Instruction Manual PTL610 TASCO, INC. HOW YOUR POWER TRACE TM OPERATES The Power Trace TM is composed of two primary components: the Receiver and the Transmitter. When the Transmitter is
Cognitive Systems and Robotics: opportunities in FP7
 Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
The safe & productive robot working without fences
 The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The safe & productive robot working without fences Final Presentation, Stuttgart, May 5 th, 2009 Objectives
The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The safe & productive robot working without fences Final Presentation, Stuttgart, May 5 th, 2009 Objectives
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
ROBOTICS, Jump to the next generation
 ROBOTICS, Jump to the next generation Erich Lohrmann Area Director Latin America KUKA Roboter GmbH COPY RIGHTS by Erich Lohrmann Human Evolution Robotic Evolution (by KUKA) International Conference on
ROBOTICS, Jump to the next generation Erich Lohrmann Area Director Latin America KUKA Roboter GmbH COPY RIGHTS by Erich Lohrmann Human Evolution Robotic Evolution (by KUKA) International Conference on
Note: Objective: Prelab: ME 5286 Robotics Labs Lab 1: Hello Cobot World Duration: 2 Weeks (1/28/2019 2/08/2019)
") ME 5286 Robotics Labs Lab 1: Hello Cobot World Duration: 2 Weeks (1/28/2019 2/08/2019) Note: At least two people must be present in the lab when operating the UR5 robot. Upload a selfie of you, your partner,
ME 5286 Robotics Labs Lab 1: Hello Cobot World Duration: 2 Weeks (1/28/2019 2/08/2019) Note: At least two people must be present in the lab when operating the UR5 robot. Upload a selfie of you, your partner,
Success Stories within Factories of the Future
 Success Stories within Factories of the Future Patrick Kennedy Communications Advisor European Factories of the Future Research Association EFFRA Representing private side in Factories of the Future PPP
Success Stories within Factories of the Future Patrick Kennedy Communications Advisor European Factories of the Future Research Association EFFRA Representing private side in Factories of the Future PPP
What will the robot do during the final demonstration?
 SPENCER Questions & Answers What is project SPENCER about? SPENCER is a European Union-funded research project that advances technologies for intelligent robots that operate in human environments. Such
SPENCER Questions & Answers What is project SPENCER about? SPENCER is a European Union-funded research project that advances technologies for intelligent robots that operate in human environments. Such
Expert cooperative robots for highly skilled operations for the factory of the future
 Expert cooperative robots for highly skilled operations Expert cooperative robots for highly skilled operations for the factory of the future Presenter: Dr. Sotiris MAKRIS Laboratory for Manufacturing
Expert cooperative robots for highly skilled operations Expert cooperative robots for highly skilled operations for the factory of the future Presenter: Dr. Sotiris MAKRIS Laboratory for Manufacturing
Virtual Co-Location for Crime Scene Investigation and Going Beyond
 Virtual Co-Location for Crime Scene Investigation and Going Beyond Stephan Lukosch Faculty of Technology, Policy and Management, Systems Engineering Section Delft University of Technology Challenge the
Virtual Co-Location for Crime Scene Investigation and Going Beyond Stephan Lukosch Faculty of Technology, Policy and Management, Systems Engineering Section Delft University of Technology Challenge the
Occupational safety and health through design of human-system interaction in reality and virtual reality
 Occupational safety and health through design of human-system interaction in reality and virtual reality Peter Nickel ISSA Symposium 2015 at ACHEMA, Frankfurt, June 17-18, 2015 ACHEMA 2003 interfaces [Pictures:
Occupational safety and health through design of human-system interaction in reality and virtual reality Peter Nickel ISSA Symposium 2015 at ACHEMA, Frankfurt, June 17-18, 2015 ACHEMA 2003 interfaces [Pictures:
Industry 4.0. Advanced and integrated SAFETY tools for tecnhical plants
 Industry 4.0 Advanced and integrated SAFETY tools for tecnhical plants Industry 4.0 Industry 4.0 is the digital transformation of manufacturing; leverages technologies, such as Big Data and Internet of
Industry 4.0 Advanced and integrated SAFETY tools for tecnhical plants Industry 4.0 Industry 4.0 is the digital transformation of manufacturing; leverages technologies, such as Big Data and Internet of
2014 Market Trends Webinar Series
 Robotic Industries Association 2014 Market Trends Webinar Series Watch live or archived at no cost Learn about the latest innovations in robotics Sponsored by leading robotics companies 1 2014 Calendar
Robotic Industries Association 2014 Market Trends Webinar Series Watch live or archived at no cost Learn about the latest innovations in robotics Sponsored by leading robotics companies 1 2014 Calendar
Study of Effectiveness of Collision Avoidance Technology
 Study of Effectiveness of Collision Avoidance Technology How drivers react and feel when using aftermarket collision avoidance technologies Executive Summary Newer vehicles, including commercial vehicles,
Study of Effectiveness of Collision Avoidance Technology How drivers react and feel when using aftermarket collision avoidance technologies Executive Summary Newer vehicles, including commercial vehicles,
HELPING BIOECONOMY RESEARCH PROJECTS RAISE THEIR GAME
 HELPING BIOECONOMY RESEARCH PROJECTS RAISE THEIR GAME An early glimpse into the lessons learnt from ProBIO 1 FOREWORD The fascinating experience of ProBIO This brochure comes as the ProBIO project is reaching
HELPING BIOECONOMY RESEARCH PROJECTS RAISE THEIR GAME An early glimpse into the lessons learnt from ProBIO 1 FOREWORD The fascinating experience of ProBIO This brochure comes as the ProBIO project is reaching
Sensors & Systems for Human Safety Assurance in Collaborative Exploration
 Sensing and Sensors CMU SCS RI 16-722 S09 Ned Fox nfox@andrew.cmu.edu Outline What is collaborative exploration? Humans sensing robots Robots sensing humans Overseers sensing both Inherently safe systems
Sensing and Sensors CMU SCS RI 16-722 S09 Ned Fox nfox@andrew.cmu.edu Outline What is collaborative exploration? Humans sensing robots Robots sensing humans Overseers sensing both Inherently safe systems
Computer-Aided Safety and Risk Prevention Pushing collaborative robotics from isolated pilots to large scale deployment
 Pushing collaborative robotics from isolated pilots to large scale deployment INRS, Nancy, France J. Saenz, C. Vogel, R. Behrens, E. Schulenburg, C. Walter, N. Elkmann 30.03.2017 Fraunhofer IFF Fraunhofer
Pushing collaborative robotics from isolated pilots to large scale deployment INRS, Nancy, France J. Saenz, C. Vogel, R. Behrens, E. Schulenburg, C. Walter, N. Elkmann 30.03.2017 Fraunhofer IFF Fraunhofer
Interactive and Immersive 3D Visualization for ATC. Matt Cooper Norrköping Visualization and Interaction Studio University of Linköping, Sweden
 Interactive and Immersive 3D Visualization for ATC Matt Cooper Norrköping Visualization and Interaction Studio University of Linköping, Sweden Background Fundamentals: Air traffic expected to increase
Interactive and Immersive 3D Visualization for ATC Matt Cooper Norrköping Visualization and Interaction Studio University of Linköping, Sweden Background Fundamentals: Air traffic expected to increase
Intelligent interaction
 BionicWorkplace: autonomously learning workstation for human-machine collaboration Intelligent interaction Face to face, hand in hand. The BionicWorkplace shows the extent to which human-machine collaboration
BionicWorkplace: autonomously learning workstation for human-machine collaboration Intelligent interaction Face to face, hand in hand. The BionicWorkplace shows the extent to which human-machine collaboration
Robotic Systems ECE 401RB Fall 2007
 The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
D8.1 PROJECT PRESENTATION
 D8.1 PROJECT PRESENTATION Approval Status AUTHOR(S) NAME AND SURNAME ROLE IN THE PROJECT PARTNER Daniela De Lucia, Gaetano Cascini PoliMI APPROVED BY Gaetano Cascini Project Coordinator PoliMI History
D8.1 PROJECT PRESENTATION Approval Status AUTHOR(S) NAME AND SURNAME ROLE IN THE PROJECT PARTNER Daniela De Lucia, Gaetano Cascini PoliMI APPROVED BY Gaetano Cascini Project Coordinator PoliMI History
Collaborative Robots in industry
 Collaborative Robots in industry Robots in Society: Event 2 Current robotics Nahema Sylla 08/11/2017 H S S M I 2 0 1 6 Introduction and context Human-Robot Collaboration in industry Principle: Human and
Collaborative Robots in industry Robots in Society: Event 2 Current robotics Nahema Sylla 08/11/2017 H S S M I 2 0 1 6 Introduction and context Human-Robot Collaboration in industry Principle: Human and
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine)
") Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
Note: Objective: Prelab: ME 5286 Robotics Labs Lab 1: Hello Cobot World Duration: 2 Weeks (1/22/2018 2/02/2018)
") ME 5286 Robotics Labs Lab 1: Hello Cobot World Duration: 2 Weeks (1/22/2018 2/02/2018) Note: At least two people must be present in the lab when operating the UR5 robot. Upload a selfie of you, your partner,
ME 5286 Robotics Labs Lab 1: Hello Cobot World Duration: 2 Weeks (1/22/2018 2/02/2018) Note: At least two people must be present in the lab when operating the UR5 robot. Upload a selfie of you, your partner,
The robot capable of understanding human-like instructions
 The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The robot capable of understanding human-like instructions Contents of this Presentation Introduction Human
The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The robot capable of understanding human-like instructions Contents of this Presentation Introduction Human
Custom workspace furniture for
 Custom workspace furniture for Education dtank creates learning and administrative facilities for the education sectors with built-in adaptability features, helping to balance expanding performance requirements
Custom workspace furniture for Education dtank creates learning and administrative facilities for the education sectors with built-in adaptability features, helping to balance expanding performance requirements
A4BLUE - Adaptive Automation in Assembly For BLUE collar workers satisfaction in Evolvable context
 A4BLUE Newsletter Issue n 2 September 2017 Updates on the first year project results A4BLUE PROJECT- Adaptive Automation in Assembly For BLUE collar workers satisfaction in Evolvable context Enjoy reading
A4BLUE Newsletter Issue n 2 September 2017 Updates on the first year project results A4BLUE PROJECT- Adaptive Automation in Assembly For BLUE collar workers satisfaction in Evolvable context Enjoy reading
High-Level Programming for Industrial Robotics: using Gestures, Speech and Force Control
 High-Level Programming for Industrial Robotics: using Gestures, Speech and Force Control Pedro Neto, J. Norberto Pires, Member, IEEE Abstract Today, most industrial robots are programmed using the typical
High-Level Programming for Industrial Robotics: using Gestures, Speech and Force Control Pedro Neto, J. Norberto Pires, Member, IEEE Abstract Today, most industrial robots are programmed using the typical
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Non-ferrous metals manufacturing industry: vision for the future and actions needed
 Non-ferrous metals manufacturing industry: vision for the future and actions needed Laurent Bontoux, François J. Dessart www.jrc.ec.europa.eu 4 th High Level Conference EIP on Raw Materials Brussels, 1
Non-ferrous metals manufacturing industry: vision for the future and actions needed Laurent Bontoux, François J. Dessart www.jrc.ec.europa.eu 4 th High Level Conference EIP on Raw Materials Brussels, 1
Towards EU-US Collaboration on the Internet of Things (IoT) & Cyber-physical Systems (CPS)
 & Cyber-physical Systems (CPS)") Towards EU-US Collaboration on the Internet of Things (IoT) & Cyber-physical Systems (CPS) Christian Sonntag Senior Researcher & Project Manager, TU Dortmund, Germany ICT Policy, Research and Innovation
Towards EU-US Collaboration on the Internet of Things (IoT) & Cyber-physical Systems (CPS) Christian Sonntag Senior Researcher & Project Manager, TU Dortmund, Germany ICT Policy, Research and Innovation
Radio remote controls:
 International Tower Cranes 2013 Radio remote controls: improving safety in tower crane operations. created by: Thomas Stegmaier Date: 2013-10-31 Agenda 1. General safety aspects. 1.1. Working with radio
International Tower Cranes 2013 Radio remote controls: improving safety in tower crane operations. created by: Thomas Stegmaier Date: 2013-10-31 Agenda 1. General safety aspects. 1.1. Working with radio
Human-robotic cooperation In the light of Industry 4.0
 Human-robotic cooperation In the light of Industry 4.0 Central European cooperation for Industry 4.0 workshop Dr. Erdős Ferenc Gábor Engineering and Management Intelligence Laboratoty (EMI) Institute for
Human-robotic cooperation In the light of Industry 4.0 Central European cooperation for Industry 4.0 workshop Dr. Erdős Ferenc Gábor Engineering and Management Intelligence Laboratoty (EMI) Institute for
Communication, Dissemination and Exploitation of results Mirela Atanasiu Head of Unit
 Communication, Dissemination and Exploitation of results Mirela Atanasiu Head of Unit 26/01/2018 FCH 2 JU Grant Agreement Enforcement of communication and dissemination activities! The beneficiaries must
Communication, Dissemination and Exploitation of results Mirela Atanasiu Head of Unit 26/01/2018 FCH 2 JU Grant Agreement Enforcement of communication and dissemination activities! The beneficiaries must
Computer Haptics and Applications
 Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
CPE/CSC 580: Intelligent Agents
 CPE/CSC 580: Intelligent Agents Franz J. Kurfess Computer Science Department California Polytechnic State University San Luis Obispo, CA, U.S.A. 1 Course Overview Introduction Intelligent Agent, Multi-Agent
CPE/CSC 580: Intelligent Agents Franz J. Kurfess Computer Science Department California Polytechnic State University San Luis Obispo, CA, U.S.A. 1 Course Overview Introduction Intelligent Agent, Multi-Agent
HUMAN SAFETY IN ROBOT APPLICATIONS REVIEW OF SAFETY TRENDS
 1. Tanja KEREZOVIĆ, 2. Gabor SZIEBIG, 3. Bjørn SOLVANG, 4. Tihomir LATINOVIC HUMAN SAFETY IN ROBOT APPLICATIONS REVIEW OF SAFETY TRENDS 1-4. FACULTY OF MECHANICAL ENGINEERING, BANJA LUKA, BOSNIA & HERZEGOVINA
1. Tanja KEREZOVIĆ, 2. Gabor SZIEBIG, 3. Bjørn SOLVANG, 4. Tihomir LATINOVIC HUMAN SAFETY IN ROBOT APPLICATIONS REVIEW OF SAFETY TRENDS 1-4. FACULTY OF MECHANICAL ENGINEERING, BANJA LUKA, BOSNIA & HERZEGOVINA
Volkswagen Australia and The Wiggles
 October 2014 Volkswagen ceased this October 2014 Volkswagen Australia and The Wiggles Getting the road safety message to kids and their parents Partners: Volkswagen, Kidsafe Child Accident Prevention Foundation,
October 2014 Volkswagen ceased this October 2014 Volkswagen Australia and The Wiggles Getting the road safety message to kids and their parents Partners: Volkswagen, Kidsafe Child Accident Prevention Foundation,
EMPOWERING THE CONNECTED FIELD FORCE WORKER WITH ADVANCED ANALYTICS MATTHEW SHORT ACCENTURE LABS
 EMPOWERING THE CONNECTED FIELD FORCE WORKER WITH ADVANCED ANALYTICS MATTHEW SHORT ACCENTURE LABS ACCENTURE LABS DUBLIN Artificial Intelligence Security SILICON VALLEY Digital Experiences Artificial Intelligence
EMPOWERING THE CONNECTED FIELD FORCE WORKER WITH ADVANCED ANALYTICS MATTHEW SHORT ACCENTURE LABS ACCENTURE LABS DUBLIN Artificial Intelligence Security SILICON VALLEY Digital Experiences Artificial Intelligence
Application of Axiomatic Design for the Design of a Safe Collaborative Human-Robot Assembly Workplace
 Application of Axiomatic Design for the Design of a Safe Collaborative Human-Robot Assembly Workplace Luca Gualtieri *, Erwin Rauch, Rafael Rojas, Renato Vidoni and Dominik T. Matt Faculty of Science and
Application of Axiomatic Design for the Design of a Safe Collaborative Human-Robot Assembly Workplace Luca Gualtieri *, Erwin Rauch, Rafael Rojas, Renato Vidoni and Dominik T. Matt Faculty of Science and
ENHANCED HUMAN-AGENT INTERACTION: AUGMENTING INTERACTION MODELS WITH EMBODIED AGENTS BY SERAFIN BENTO. MASTER OF SCIENCE in INFORMATION SYSTEMS
 BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
SMart wearable Robotic Teleoperated surgery
 SMart wearable Robotic Teleoperated surgery This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No 732515 Context Minimally
SMart wearable Robotic Teleoperated surgery This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No 732515 Context Minimally
INNOVATION IN MINING. Overview. Grade Band: Topic. Real world science topics. Objective
 INNOVATION IN MINING Overview In this activity, students will learn about the costs associated with operating a mine and how technology can help to reduce the costs in three areas; energy, resources, and
INNOVATION IN MINING Overview In this activity, students will learn about the costs associated with operating a mine and how technology can help to reduce the costs in three areas; energy, resources, and
Factories of the Future Industry 4.0 The European Perspective
 Factories of the Future Industry 4.0 The European Perspective Luis Carneiro INESC TEC, on behalf of EFFRA Agenda The importance of the manufacturing industry EFFRA The European Factories of the Future
Factories of the Future Industry 4.0 The European Perspective Luis Carneiro INESC TEC, on behalf of EFFRA Agenda The importance of the manufacturing industry EFFRA The European Factories of the Future
Call Path Control and Reverse Behavioral Targeting. How We Get People To Respond And Why You Need to Control The Call
 Call Path Control and Reverse Behavioral Targeting How We Get People To Respond And Why You Need to Control The Call Simple Overview DATA MARKETING (DBC+EMAIL) FOLLOW UP (DBC+EMAIL+SOCIAL MEDIA) Any Updates
Call Path Control and Reverse Behavioral Targeting How We Get People To Respond And Why You Need to Control The Call Simple Overview DATA MARKETING (DBC+EMAIL) FOLLOW UP (DBC+EMAIL+SOCIAL MEDIA) Any Updates
European Circular Economy Stakeholder Conference Brussels, February 2018 Civil Society Perspectives
 European Circular Economy Stakeholder Conference Brussels, 20-21 February 2018 Civil Society Perspectives On the 20 th and 21 st February 2018, the European Commission and the European Economic and Social
European Circular Economy Stakeholder Conference Brussels, 20-21 February 2018 Civil Society Perspectives On the 20 th and 21 st February 2018, the European Commission and the European Economic and Social
European Robotics Research: Achievements and challenges
 European Robotics Research: Achievements and challenges Libor Král, Head of Unit, CONNECT A2 Robotics European Commission IROS 2012 Vila Moura, Algarve, Portugal 9 October 2012 European robotics research
European Robotics Research: Achievements and challenges Libor Král, Head of Unit, CONNECT A2 Robotics European Commission IROS 2012 Vila Moura, Algarve, Portugal 9 October 2012 European robotics research
Effective Iconography....convey ideas without words; attract attention...
 Effective Iconography...convey ideas without words; attract attention... Visual Thinking and Icons An icon is an image, picture, or symbol representing a concept Icon-specific guidelines Represent the
Effective Iconography...convey ideas without words; attract attention... Visual Thinking and Icons An icon is an image, picture, or symbol representing a concept Icon-specific guidelines Represent the
Intelligent Robotic Systems. What is a Robot? Is This a Robot? Prof. Richard Voyles Department of Computer Engineering University of Denver
 Intelligent Robotic Systems Prof. Richard Voyles Department of Computer Engineering University of Denver ENCE 3830/4800 What is a Robot? WWWebsters: a mechanism guided by automatic controls a device that
Intelligent Robotic Systems Prof. Richard Voyles Department of Computer Engineering University of Denver ENCE 3830/4800 What is a Robot? WWWebsters: a mechanism guided by automatic controls a device that
WRS Partner Robot Challenge (Virtual Space) is the World's first competition played under the cyber-physical environment.
 is the World's first competition played under the cyber-physical environment.") WRS Partner Robot Challenge (Virtual Space) 2018 WRS Partner Robot Challenge (Virtual Space) is the World's first competition played under the cyber-physical environment. 1 Introduction The Partner Robot
WRS Partner Robot Challenge (Virtual Space) 2018 WRS Partner Robot Challenge (Virtual Space) is the World's first competition played under the cyber-physical environment. 1 Introduction The Partner Robot
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Technifutur. Maarten Daemen Sales Engineer / KUKA Automatisering + Robots NV KUKA LBR iiwa M. Daemen
 Technifutur Maarten Daemen Sales Engineer / KUKA Automatisering + Robots NV 2016-11-28 page: 1 ii invite you page: 2 LBR iiwa LBR stands for Leichtbauroboter (German for lightweight robot), iiwa for intelligent
Technifutur Maarten Daemen Sales Engineer / KUKA Automatisering + Robots NV 2016-11-28 page: 1 ii invite you page: 2 LBR iiwa LBR stands for Leichtbauroboter (German for lightweight robot), iiwa for intelligent
MegaPoints Controller
 MegaPoints Controller A flexible solution and modular component for controlling model railway points and semaphore signals using inexpensive servos. User guide Revision 10c March 2015 MegaPoints Controllers
MegaPoints Controller A flexible solution and modular component for controlling model railway points and semaphore signals using inexpensive servos. User guide Revision 10c March 2015 MegaPoints Controllers
DIE SPLITTERS Designers of Safety
 DIE SPLITTERS Designers of Safety OUR EXPERIENCE. Attrezzeria Universal has been building dies and dedicated equipment since 1972. Founded by Armando Caramaschi, the company developed its experience starting
DIE SPLITTERS Designers of Safety OUR EXPERIENCE. Attrezzeria Universal has been building dies and dedicated equipment since 1972. Founded by Armando Caramaschi, the company developed its experience starting
Social Viewing in Cinematic Virtual Reality: Challenges and Opportunities
 Social Viewing in Cinematic Virtual Reality: Challenges and Opportunities Sylvia Rothe 1, Mario Montagud 2, Christian Mai 1, Daniel Buschek 1 and Heinrich Hußmann 1 1 Ludwig Maximilian University of Munich,
Social Viewing in Cinematic Virtual Reality: Challenges and Opportunities Sylvia Rothe 1, Mario Montagud 2, Christian Mai 1, Daniel Buschek 1 and Heinrich Hußmann 1 1 Ludwig Maximilian University of Munich,
Evaluating the Augmented Reality Human-Robot Collaboration System
 Evaluating the Augmented Reality Human-Robot Collaboration System Scott A. Green *, J. Geoffrey Chase, XiaoQi Chen Department of Mechanical Engineering University of Canterbury, Christchurch, New Zealand
Evaluating the Augmented Reality Human-Robot Collaboration System Scott A. Green *, J. Geoffrey Chase, XiaoQi Chen Department of Mechanical Engineering University of Canterbury, Christchurch, New Zealand
Technology offer. Aerial obstacle detection software for the visually impaired
 Technology offer Aerial obstacle detection software for the visually impaired Technology offer: Aerial obstacle detection software for the visually impaired SUMMARY The research group Mobile Vision Research
Technology offer Aerial obstacle detection software for the visually impaired Technology offer: Aerial obstacle detection software for the visually impaired SUMMARY The research group Mobile Vision Research
Benchmarking Intelligent Service Robots through Scientific Competitions: the approach. Luca Iocchi. Sapienza University of Rome, Italy
 Benchmarking Intelligent Service Robots through Scientific Competitions: the RoboCup@Home approach Luca Iocchi Sapienza University of Rome, Italy Motivation Benchmarking Domestic Service Robots Complex
Benchmarking Intelligent Service Robots through Scientific Competitions: the RoboCup@Home approach Luca Iocchi Sapienza University of Rome, Italy Motivation Benchmarking Domestic Service Robots Complex
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts
 Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
S.4 Cab & Controls Information Report:
 Issued: May 2009 S.4 Cab & Controls Information Report: 2009-1 Assessing Distraction Risks of Driver Interfaces Developed by the Technology & Maintenance Council s (TMC) Driver Distraction Assessment Task
Issued: May 2009 S.4 Cab & Controls Information Report: 2009-1 Assessing Distraction Risks of Driver Interfaces Developed by the Technology & Maintenance Council s (TMC) Driver Distraction Assessment Task
Auto und Umwelt - das Auto als Plattform für Interaktive
 Der Fahrer im Dialog mit Auto und Umwelt - das Auto als Plattform für Interaktive Anwendungen Prof. Dr. Albrecht Schmidt Pervasive Computing University Duisburg-Essen http://www.pervasive.wiwi.uni-due.de/
Der Fahrer im Dialog mit Auto und Umwelt - das Auto als Plattform für Interaktive Anwendungen Prof. Dr. Albrecht Schmidt Pervasive Computing University Duisburg-Essen http://www.pervasive.wiwi.uni-due.de/
Graduate Programme. Begin your rewarding career in engineering at the AMRC. amrc.co.uk
 Graduate Programme Begin your rewarding career in engineering at the AMRC amrc.co.uk The University of Sheffield Advanced Manufacturing Research Centre with Boeing helps manufacturers of any size to become
Graduate Programme Begin your rewarding career in engineering at the AMRC amrc.co.uk The University of Sheffield Advanced Manufacturing Research Centre with Boeing helps manufacturers of any size to become
Market Access and Environmental Requirements
 Market Access and Environmental Requirements THE EFFECT OF ENVIRONMENTAL MEASURES ON MARKET ACCESS Marrakesh Declaration - Item 6 - (First Part) 9 The effect of environmental measures on market access,
Market Access and Environmental Requirements THE EFFECT OF ENVIRONMENTAL MEASURES ON MARKET ACCESS Marrakesh Declaration - Item 6 - (First Part) 9 The effect of environmental measures on market access,
Release Notes v KINOVA Gen3 Ultra lightweight robot enabled by KINOVA KORTEX
 Release Notes v1.1.4 KINOVA Gen3 Ultra lightweight robot enabled by KINOVA KORTEX Contents Overview 3 System Requirements 3 Release Notes 4 v1.1.4 4 Release date 4 Software / firmware components release
Release Notes v1.1.4 KINOVA Gen3 Ultra lightweight robot enabled by KINOVA KORTEX Contents Overview 3 System Requirements 3 Release Notes 4 v1.1.4 4 Release date 4 Software / firmware components release
Trade of Sheet Metalwork. Module 7: Introduction to CNC Sheet Metal Manufacturing Unit 2: CNC Machines Phase 2
 Trade of Sheet Metalwork Module 7: Introduction to CNC Sheet Metal Manufacturing Unit 2: CNC Machines Phase 2 Table of Contents List of Figures... 4 List of Tables... 5 Document Release History... 6 Module
Trade of Sheet Metalwork Module 7: Introduction to CNC Sheet Metal Manufacturing Unit 2: CNC Machines Phase 2 Table of Contents List of Figures... 4 List of Tables... 5 Document Release History... 6 Module
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Alternative Interfaces. Overview. Limitations of the Mac Interface. SMD157 Human-Computer Interaction Fall 2002
 INSTITUTIONEN FÖR SYSTEMTEKNIK LULEÅ TEKNISKA UNIVERSITET Alternative Interfaces SMD157 Human-Computer Interaction Fall 2002 Nov-27-03 SMD157, Alternate Interfaces 1 L Overview Limitation of the Mac interface
INSTITUTIONEN FÖR SYSTEMTEKNIK LULEÅ TEKNISKA UNIVERSITET Alternative Interfaces SMD157 Human-Computer Interaction Fall 2002 Nov-27-03 SMD157, Alternate Interfaces 1 L Overview Limitation of the Mac interface
I C T. Per informazioni contattare: "Vincenzo Angrisani" -
 I C T Per informazioni contattare: "Vincenzo Angrisani" - angrisani@apre.it Reference n.: ICT-PT-SMCP-1 Deadline: 23/10/2007 Programme: ICT Project Title: Intention recognition in human-machine interaction
I C T Per informazioni contattare: "Vincenzo Angrisani" - angrisani@apre.it Reference n.: ICT-PT-SMCP-1 Deadline: 23/10/2007 Programme: ICT Project Title: Intention recognition in human-machine interaction
2011 / Circuit Tracer
 INSTRUCTION MANUAL 2011 / 00521 Circuit Tracer Read and understand all of the instructions and safety information in this manual before operating or servicing this tool. 52044992 2008 Greenlee Textron
INSTRUCTION MANUAL 2011 / 00521 Circuit Tracer Read and understand all of the instructions and safety information in this manual before operating or servicing this tool. 52044992 2008 Greenlee Textron
Collaborative Robots and the factory of the future. Nicolas De Keijser Assembly & Test Business Line Manager, USA
 2018-09-26 Collaborative Robots and the factory of the future Nicolas De Keijser Assembly & Test Business Line Manager, USA Strong Growth for Collaborative Robots Forecasted October 1, 2018 Slide 2 ABB
2018-09-26 Collaborative Robots and the factory of the future Nicolas De Keijser Assembly & Test Business Line Manager, USA Strong Growth for Collaborative Robots Forecasted October 1, 2018 Slide 2 ABB
TECHNOLOGICAL COOPERATION MISSION COMPANY PARTNER SEARCH
 TECHNOLOGICAL COOPERATION MISSION COMPANY PARTNER SEARCH The information you are about to provide in this form will be distributed among GERMAN companies matching your company profile and that might be
TECHNOLOGICAL COOPERATION MISSION COMPANY PARTNER SEARCH The information you are about to provide in this form will be distributed among GERMAN companies matching your company profile and that might be
PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES
 Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Safety Standards and Collaborative Robots. Pat Davison Robotic Industries Association
 Safety Standards and Collaborative Robots Pat Davison Robotic Industries Association Topics What is it? How did we get here? What has already been done? What still needs doing? Standards ISO 10218-1:2006
Safety Standards and Collaborative Robots Pat Davison Robotic Industries Association Topics What is it? How did we get here? What has already been done? What still needs doing? Standards ISO 10218-1:2006
Interactive and Immersive 3D Visualization for ATC
 Interactive and Immersive 3D Visualization for ATC Matt Cooper & Marcus Lange Norrköping Visualization and Interaction Studio University of Linköping, Sweden Summary of last presentation A quick description
Interactive and Immersive 3D Visualization for ATC Matt Cooper & Marcus Lange Norrköping Visualization and Interaction Studio University of Linköping, Sweden Summary of last presentation A quick description
Advances in Robotics & Automation
 Advances in Robotics & Automation Advances in Robotics & Automation Bolmsjo, Adv Robot Autom 2014, 3:1 DOI: Review Article Open Access Reconfigurable and Flexible Industrial Robot Systems Gunnar Bolmsjo
Advances in Robotics & Automation Advances in Robotics & Automation Bolmsjo, Adv Robot Autom 2014, 3:1 DOI: Review Article Open Access Reconfigurable and Flexible Industrial Robot Systems Gunnar Bolmsjo
TEST PROJECT MOBILE ROBOTICS FOR JUNIOR
 TEST PROJECT MOBILE ROBOTICS FOR JUNIOR CONTENTS This Test Project proposal consists of the following documentation/files: 1. DESCRIPTION OF PROJECT AND TASKS DOCUMENTATION The JUNIOR challenge of Mobile
TEST PROJECT MOBILE ROBOTICS FOR JUNIOR CONTENTS This Test Project proposal consists of the following documentation/files: 1. DESCRIPTION OF PROJECT AND TASKS DOCUMENTATION The JUNIOR challenge of Mobile
Safe use of meat bandsaws
 Guidance note Safe use of meat bandsaws This information sheet provides practical advice for employers about controlling hazards while using meat bandsaws. February 2011 Background Meat bandsaws are commonly
Guidance note Safe use of meat bandsaws This information sheet provides practical advice for employers about controlling hazards while using meat bandsaws. February 2011 Background Meat bandsaws are commonly
Can an Interlocked Guard take the Place of LockOut/TagOut?
 Can an Interlocked Guard take the Place of LockOut/TagOut? Yes, if the Requirements of the Minor Servicing Exception are Met Jeffery H. Warren, PhD, PE, CSP A forge operator s right hand and arm had to
Can an Interlocked Guard take the Place of LockOut/TagOut? Yes, if the Requirements of the Minor Servicing Exception are Met Jeffery H. Warren, PhD, PE, CSP A forge operator s right hand and arm had to
Robotics in Horizon 2020 ICT Work Programme
 Robotics in Horizon 2020 ICT Work Programme 2018 2020 Leadership in Enabling and Industrial Technologies (LEIT) Information and Communication Technologies (ICT) Draft elements for discussion with Programme
Robotics in Horizon 2020 ICT Work Programme 2018 2020 Leadership in Enabling and Industrial Technologies (LEIT) Information and Communication Technologies (ICT) Draft elements for discussion with Programme
Case Study The ABC of IP strategy for a small R&D company
 European IPR Helpdesk Case Study The ABC of IP strategy for a small R&D company August 2017 TNtech, s.r.o. R&D company www.tntech.eu 1. Background The transition from conventional to renewable energy sources
European IPR Helpdesk Case Study The ABC of IP strategy for a small R&D company August 2017 TNtech, s.r.o. R&D company www.tntech.eu 1. Background The transition from conventional to renewable energy sources
One App at a Time: How Technology Promotes Safety in the Design & Construction Industry
 One App at a Time: How Technology Promotes Safety in the Design & Construction Industry RLI Design Professionals DPLE 290 May 16, 2018 RLI Design Professionals is a Registered Provider with The American
One App at a Time: How Technology Promotes Safety in the Design & Construction Industry RLI Design Professionals DPLE 290 May 16, 2018 RLI Design Professionals is a Registered Provider with The American
CORC 3303 Exploring Robotics. Why Teams?
 Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
EFFRA and the Factories of the Future PPP
 Digitising European Industry Stakeholder Forum, Feb 2017 EFFRA and the Factories of the Future PPP Speaker: Maurizio Gattiglio EFFRA Chairman European Factories of the Future Research Association (EFFRA)
Digitising European Industry Stakeholder Forum, Feb 2017 EFFRA and the Factories of the Future PPP Speaker: Maurizio Gattiglio EFFRA Chairman European Factories of the Future Research Association (EFFRA)
Machine safety: why sticking to standards is a step in the right direction
 (Courtesy of Process Engineering, December 2016) (http://adserver.adtech.de/?adlink/1309/5932688/0/225/adid=16245674;bnid=2;itime=722418487;) Home (/) Safety/HSE (/category/1018/safety-hse) Machine safety:
(Courtesy of Process Engineering, December 2016) (http://adserver.adtech.de/?adlink/1309/5932688/0/225/adid=16245674;bnid=2;itime=722418487;) Home (/) Safety/HSE (/category/1018/safety-hse) Machine safety:
WorldDAB Automotive DAB Digital Radio In Car User Experience Design Guidelines. Version 2 - February 2019
 WorldDAB Automotive DAB Digital Radio In Car User Experience Design Guidelines Version 2 - February 2019 1. Background a) Radio in-car b) In car user experience Group c) Document status and future work
WorldDAB Automotive DAB Digital Radio In Car User Experience Design Guidelines Version 2 - February 2019 1. Background a) Radio in-car b) In car user experience Group c) Document status and future work
Enhancing Robot Teleoperator Situation Awareness and Performance using Vibro-tactile and Graphical Feedback
 Enhancing Robot Teleoperator Situation Awareness and Performance using Vibro-tactile and Graphical Feedback by Paulo G. de Barros Robert W. Lindeman Matthew O. Ward Human Interaction in Vortual Environments
Enhancing Robot Teleoperator Situation Awareness and Performance using Vibro-tactile and Graphical Feedback by Paulo G. de Barros Robert W. Lindeman Matthew O. Ward Human Interaction in Vortual Environments
Fast Track to Innovation A 3 Million Opportunity
 Fast Track to Innovation A 3 Million Opportunity About FreeMind The largest international consulting firm, specializes in non-dilutive funding Optimizing non-dilutive funding potential Est. 1999 45 Fulltime
Fast Track to Innovation A 3 Million Opportunity About FreeMind The largest international consulting firm, specializes in non-dilutive funding Optimizing non-dilutive funding potential Est. 1999 45 Fulltime