Collaborative Robots in industry
|
|
|
- Sophie Warner
- 5 years ago
- Views:
Transcription

1 Collaborative Robots in industry Robots in Society: Event 2 Current robotics Nahema Sylla 08/11/2017 H S S M I


2 Introduction and context


3 Human-Robot Collaboration in industry Principle: Human and robot sharing workspace without any fence Dexterity Problem Solving Fatigue Strength No fatigue No intelligence
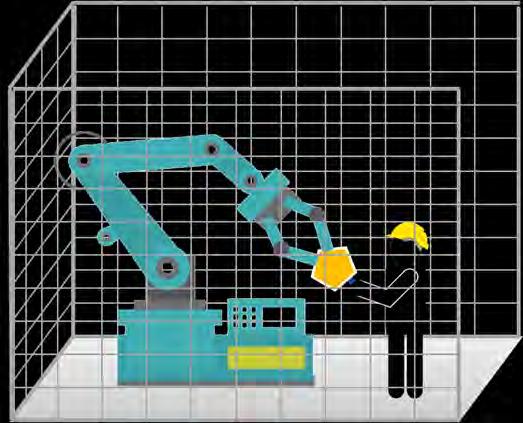


4 Types of Collaboration (ISO 10218) Safety Monitored Stop Hand guiding Speed and Separation Monitoring Power and Force Limiting

5 Benefits and key applications in automotive industry Maximum value for Key applications Ergonomics improvements Use as a third hand Line balancing activities Quality improvement Better floor space utilization Versatile and flexible operations
6 The Cobots working group



7 Headlines #COBOTICS The Future is Man with Machine Cobots cheaper than fenced options Cobots at forefront of the factory of the future
8 Context Issue Perception from leading UK Automotive manufacturers that UK plants are falling behind their European and Global competitors in the application of Collaborative Robots UK plants perceived as less productive The issue is largely seen as the interpretation of standards and the development of implementation guidelines Objectives of the working group Understand the root cause of this competitive disadvantage Facilitate safe, consistent and cost effective deployment of Collaborative Robots systems in UK automotive plants Develop and share best practice related to safe application

9 Partners and consultation process Partners Supported by the Health and Safety Executive Consultation process Commenced its activities in August 2016 Meetings at regular intervals over a period of 10 months Workshops, consultations, interviews and gathering information through questionnaires Wide variety of inputs collected from universities, robot manufacturers, Catapult centres, software providers, automotive OEM s, trade organisations, and other European industrial safety organisations

10 Main outcome Implementation of Collaborative Robot Applications Aim: Provide a definition of a truly collaborative application and identify the differences to the standard collaboration modes Understand the legal requirements of safety compliance versus technical specifications Develop implementation guidelines for truly collaborative applications along with guidance for risk assessment Identify key applications for automotive manufacturing Establish key limitations for collaborative applications

11 Truly Collaborative application Definition given by the working group: A truly collaborative application is a programmable electromechanical system that has been designed, constructed, assessed and locked through a certified change control process, within a prescribed environment to operate within a tolerable level of risk in all reasonably foreseeable modes whilst collaborating in a shared workspace with a trained employee performing a standard operation.
12 Installation Guidelines for Collaborative applications Select the robot with right safety measures Design the application Install the application Installation Guidelines Identify the need Test and validate the application Risk Assessment
13 Standards and regulations ISO 12100: Safety of machinery, General principles for design, Risk assessment and risk reduction Table B1, 2 & 3 Hazards, hazardous situations and hazardous events to consider to perform risk assessment ISO : Robots and robotic devices, safety requirements for industrial robots, Part 2: Robot systems and integration ISO : Robots and robotic devices, safety requirements for industrial robots, Part 2: Robot systems and integration ISO/TS 15066: Robots and robotic devices, Collaborative robots Section (a) Section Section 4.2 (b) General requirements of collaborative robot operation; points to consider to perform risk assessment Ex: Robot characteristics, end-effector hazards, layout of the robot system, operator location, operator path application-specific hazards Safety features to select for ensuring a safe work environment when using a truly collaborative robot Access and clearance factors to consider to reduce risks and hazards when designing a collaborative application. ISO/TS 15066: Robots and robotic devices, Collaborative robots ISO/TS 15066: Robots and robotic devices, Collaborative robots Section (b) Section Identification of hazards related to robot applications, including Ex: end effector and workpiece hazards, operation motion and location, influence of the surroundings Identification and documentation of reasonably foreseeable tasks and hazards combination associated with the robot cell

14 TS : Bio Mechanical Limits General industry perception is that the standard is restrictive Regular working on line more force and pressure are experienced on the shop floor For payloads above 5kg within a shared workspace speed of 250mm/sec to 400mm/sec would satisfy the TS15066 (from a study of 6 applications)





15 Limitations Low payload Level of risk Low variety of parts to handle Unpredictability of human behaviour Low speed Difficulty to meet the cycle time Limited applications Shared workspace solve specific problems
16 RACE
17 Introduction - Risk assessment for collaborative applications is extremely critical - Gap in conducting risk assessment virtually before the physical installation Goal: Create a virtual risk assessment tool for truly collaborative applications


18 Overview RACE= Risk Assessment for Collaborative work Environment Simulation Hazard Evaluation Result Robot CAD model Robot task/ script Operator task & positions End effector CAD model Foreseeable risk of collision Exposed body region Type of end effector Trap points No hazard identified Needs further attention - Developed as an add-on of an existing simulator - Simulator should include both human and robot dynamic models
19 Simulator - Highly customisable simulator - Versatile and ideal for multi-robot application - Large library of collaborative robot models - Scripts written in C/C++, Python, Java, Lua, Matlab or Octave



20 Feature 1: Programing the Robot task Option a: Script Writing Option b: Graphical programming Define manually the robot trajectory with waypoints From inverse Kinematics


21 Feature 2: Operator envelope - Envelope around the human model - Collision tolerance - Diameter = body segment length






22 Feature 3: Collision detection - Detects any collision: - Human/Robot - Human Envelope/Robot - Visual output: colour change during simulation




23 Feature 4: Speed calculation - Maximum recommended speed calculation: - According to the body region - Compliance with ISO/TS15066






, -")
24 Next steps Robot script transcription: Import the robot script to program the robot task User interface Collision Report with details: - Body region affected, time - Type of contact (point, line, contact), - Screenshot Operator task Graphical programming
25 Thank you.
collaborate. innovate. deploy. Implementation of Collaborative Robot Applications A Report from the Industrial Working Group
 collaborate. innovate. deploy. Implementation of Collaborative Robot Applications A Report from the Industrial Working Group 29th June, 2017 Authors Nahema Sylla, Technical Lead, Ergonomics & Collaborative
collaborate. innovate. deploy. Implementation of Collaborative Robot Applications A Report from the Industrial Working Group 29th June, 2017 Authors Nahema Sylla, Technical Lead, Ergonomics & Collaborative
SICK AG WHITE PAPER SAFE ROBOTICS SAFETY IN COLLABORATIVE ROBOT SYSTEMS
 SICK AG WHITE PAPER 2017-05 AUTHORS Fanny Platbrood Product Manager Industrial Safety Systems, Marketing & Sales at SICK AG in Waldkirch, Germany Otto Görnemann Manager Machine Safety & Regulations at
SICK AG WHITE PAPER 2017-05 AUTHORS Fanny Platbrood Product Manager Industrial Safety Systems, Marketing & Sales at SICK AG in Waldkirch, Germany Otto Görnemann Manager Machine Safety & Regulations at
How To Create The Right Collaborative System For Your Application. Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation
 How To Create The Right Collaborative System For Your Application Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation C Definitions Cobot: for this presentation a robot specifically designed
How To Create The Right Collaborative System For Your Application Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation C Definitions Cobot: for this presentation a robot specifically designed
Positioning Paper Demystifying Collaborative Industrial Robots
 Positioning Paper Demystifying Collaborative Industrial Robots published by International Federation of Robotics Frankfurt, Germany December 2018 A positioning paper by the International Federation of
Positioning Paper Demystifying Collaborative Industrial Robots published by International Federation of Robotics Frankfurt, Germany December 2018 A positioning paper by the International Federation of
Note: Objective: Prelab: ME 5286 Robotics Labs Lab 1: Hello Cobot World Duration: 2 Weeks (1/22/2018 2/02/2018)
") ME 5286 Robotics Labs Lab 1: Hello Cobot World Duration: 2 Weeks (1/22/2018 2/02/2018) Note: At least two people must be present in the lab when operating the UR5 robot. Upload a selfie of you, your partner,
ME 5286 Robotics Labs Lab 1: Hello Cobot World Duration: 2 Weeks (1/22/2018 2/02/2018) Note: At least two people must be present in the lab when operating the UR5 robot. Upload a selfie of you, your partner,
Note: Objective: Prelab: ME 5286 Robotics Labs Lab 1: Hello Cobot World Duration: 2 Weeks (1/28/2019 2/08/2019)
") ME 5286 Robotics Labs Lab 1: Hello Cobot World Duration: 2 Weeks (1/28/2019 2/08/2019) Note: At least two people must be present in the lab when operating the UR5 robot. Upload a selfie of you, your partner,
ME 5286 Robotics Labs Lab 1: Hello Cobot World Duration: 2 Weeks (1/28/2019 2/08/2019) Note: At least two people must be present in the lab when operating the UR5 robot. Upload a selfie of you, your partner,
Collaborative Robots and the factory of the future. Nicolas De Keijser Assembly & Test Business Line Manager, USA
 2018-09-26 Collaborative Robots and the factory of the future Nicolas De Keijser Assembly & Test Business Line Manager, USA Strong Growth for Collaborative Robots Forecasted October 1, 2018 Slide 2 ABB
2018-09-26 Collaborative Robots and the factory of the future Nicolas De Keijser Assembly & Test Business Line Manager, USA Strong Growth for Collaborative Robots Forecasted October 1, 2018 Slide 2 ABB
ISO Activity Update. International Organization for Standardization
 ISO Activity Update Jeff Fryman Convenor ISO TC184/SC2 WG 3 October 14 th 16 th, 2013 ~ Indianapolis, Indiana USA International Organization for Standardization ISO TC 184 Automation Systems and Integration
ISO Activity Update Jeff Fryman Convenor ISO TC184/SC2 WG 3 October 14 th 16 th, 2013 ~ Indianapolis, Indiana USA International Organization for Standardization ISO TC 184 Automation Systems and Integration
ANSI/ RIA R15.06 (Robot Safety Standard) Update. Acknowledgements
 Update. Acknowledgements") ANSI/ RIA R15.06 (Robot Safety Standard) Update Roberta Nelson Shea Global Marketing Manager, Safety Components Rockwell Automation October 14 th 16 th, 2013 ~ Indianapolis, Indiana USA Acknowledgements
ANSI/ RIA R15.06 (Robot Safety Standard) Update Roberta Nelson Shea Global Marketing Manager, Safety Components Rockwell Automation October 14 th 16 th, 2013 ~ Indianapolis, Indiana USA Acknowledgements
APAS assistant. Product scope
 APAS assistant Product scope APAS assistant Table of contents Non-contact human-robot collaboration for the Smart Factory Robots have improved the working world in the past years in many ways. Above and
APAS assistant Product scope APAS assistant Table of contents Non-contact human-robot collaboration for the Smart Factory Robots have improved the working world in the past years in many ways. Above and
Special Patterns - Introduction. -Manufacture of large things -Technology Provider
 Special Patterns - Introduction -Manufacture of large things -Technology Provider Deny Tanuwidjaja (M.EngElectronics and Control Systems) 6 Years Robot programming 4 Years Control systems programming 5
Special Patterns - Introduction -Manufacture of large things -Technology Provider Deny Tanuwidjaja (M.EngElectronics and Control Systems) 6 Years Robot programming 4 Years Control systems programming 5
Machine Vision for Collaborative Robot Applications. David L. Dechow FANUC America Corporation
 Machine Vision for Collaborative Robot Applications David L. Dechow FANUC America Corporation Topics Overview of collaborative robot technologies The roles for machine vision It s still machine vision
Machine Vision for Collaborative Robot Applications David L. Dechow FANUC America Corporation Topics Overview of collaborative robot technologies The roles for machine vision It s still machine vision
Comau AURA - Advanced Use Robotic Arm AURA. Soft as a Human Touch
 AURA Soft as a Human Touch 2 The Culture of Automation Designing advanced automation solutions means thinking about the industry in a new way, developing new scenarios, designing innovative products and
AURA Soft as a Human Touch 2 The Culture of Automation Designing advanced automation solutions means thinking about the industry in a new way, developing new scenarios, designing innovative products and
AURA Soft as a Human Touch
 The Culture of Automation AURA Soft as a Human Touch Designing advanced automation solutions means thinking about the industry in a new way, developing new scenarios, designing innovative products and
The Culture of Automation AURA Soft as a Human Touch Designing advanced automation solutions means thinking about the industry in a new way, developing new scenarios, designing innovative products and
Note: Objective: Prelab: ME 5286 Robotics Labs Lab 1: Hello World Duration: 1 Week
 ME 5286 Robotics Labs Lab 1: Hello World Duration: 1 Week Note: Two people must be present in the lab when operating the UR5 robot. Upload a selfie of you, your partner, and the robot to the Moodle submission
ME 5286 Robotics Labs Lab 1: Hello World Duration: 1 Week Note: Two people must be present in the lab when operating the UR5 robot. Upload a selfie of you, your partner, and the robot to the Moodle submission
Technifutur. Maarten Daemen Sales Engineer / KUKA Automatisering + Robots NV KUKA LBR iiwa M. Daemen
 Technifutur Maarten Daemen Sales Engineer / KUKA Automatisering + Robots NV 2016-11-28 page: 1 ii invite you page: 2 LBR iiwa LBR stands for Leichtbauroboter (German for lightweight robot), iiwa for intelligent
Technifutur Maarten Daemen Sales Engineer / KUKA Automatisering + Robots NV 2016-11-28 page: 1 ii invite you page: 2 LBR iiwa LBR stands for Leichtbauroboter (German for lightweight robot), iiwa for intelligent
The role of trade unions in promoting safer machinery
 The role of trade unions in promoting safer machinery Stefano Boy European Trade Union Institute (ETUI) 6 th Atlantic Alliance Conference: Global Initiatives on Safety and Health Outline The context The
The role of trade unions in promoting safer machinery Stefano Boy European Trade Union Institute (ETUI) 6 th Atlantic Alliance Conference: Global Initiatives on Safety and Health Outline The context The
Medical Robotics LBR Med
 Medical Robotics LBR Med EN KUKA, a proven robotics partner. Discerning users around the world value KUKA as a reliable partner. KUKA has branches in over 30 countries, and for over 40 years, we have been
Medical Robotics LBR Med EN KUKA, a proven robotics partner. Discerning users around the world value KUKA as a reliable partner. KUKA has branches in over 30 countries, and for over 40 years, we have been
COBOTs. What is it? Pilz Belgium CVBA Trainingen Gent, October 2016
 WELCOME COBOTs. What is it? Pilz Belgium CVBA Trainingen Gent, October 2016 } Robot applications Number of robots per industry segment 3 } Introduction to Robot Safety How Robot Safety is Viewed in the
WELCOME COBOTs. What is it? Pilz Belgium CVBA Trainingen Gent, October 2016 } Robot applications Number of robots per industry segment 3 } Introduction to Robot Safety How Robot Safety is Viewed in the
THE REALITY OF COLLABORATIVE ROBOT DEPLOYMENTS. Chris Harbert, Global Director of Sales Hannover Messe 2016
 THE REALITY OF COLLABORATIVE ROBOT DEPLOYMENTS Chris Harbert, Global Director of Sales Hannover Messe 2016 1 AGENDA Collaborative robots: what they are and how they are different Why manufacturers are
THE REALITY OF COLLABORATIVE ROBOT DEPLOYMENTS Chris Harbert, Global Director of Sales Hannover Messe 2016 1 AGENDA Collaborative robots: what they are and how they are different Why manufacturers are
Meets Cobots. The NEW Collaborative SCHUNK Gripper
 The NEW Collaborative SCHUNK Gripper Meets Cobots Superior Clamping and Gripping Top Performance in the Team SCHUNK is the world s No. 1 for clamping technology and gripping systems from the smallest parallel
The NEW Collaborative SCHUNK Gripper Meets Cobots Superior Clamping and Gripping Top Performance in the Team SCHUNK is the world s No. 1 for clamping technology and gripping systems from the smallest parallel
Baxter Safety and Compliance Overview
 Baxter Safety and Compliance Overview How this unique collaborative robot safely manages operational risks Unlike typical industrial robots that operate behind safeguarding, Baxter, the collaborative robot
Baxter Safety and Compliance Overview How this unique collaborative robot safely manages operational risks Unlike typical industrial robots that operate behind safeguarding, Baxter, the collaborative robot
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Application of Axiomatic Design for the Design of a Safe Collaborative Human-Robot Assembly Workplace
 Application of Axiomatic Design for the Design of a Safe Collaborative Human-Robot Assembly Workplace Luca Gualtieri *, Erwin Rauch, Rafael Rojas, Renato Vidoni and Dominik T. Matt Faculty of Science and
Application of Axiomatic Design for the Design of a Safe Collaborative Human-Robot Assembly Workplace Luca Gualtieri *, Erwin Rauch, Rafael Rojas, Renato Vidoni and Dominik T. Matt Faculty of Science and
What s hot right now and where is it heading?
 Collaborative Robotics in Industry 4.0 What s hot right now and where is it heading? THA Webinar 05.10.2017 Collaborative Robotics in Industry 4.0 Overview What is Human-Robot Collaboration? Common misconceptions
Collaborative Robotics in Industry 4.0 What s hot right now and where is it heading? THA Webinar 05.10.2017 Collaborative Robotics in Industry 4.0 Overview What is Human-Robot Collaboration? Common misconceptions
ROBO-PARTNER: Safe human-robot collaboration for assembly: case studies and challenges
 ROBO-PARTNER: Safe human-robot collaboration for assembly: case studies and challenges Dr. George Michalos University of Patras ROBOT FORUM ASSEMBLY 16 March 2016 Parma, Italy Introduction Human sensitivity
ROBO-PARTNER: Safe human-robot collaboration for assembly: case studies and challenges Dr. George Michalos University of Patras ROBOT FORUM ASSEMBLY 16 March 2016 Parma, Italy Introduction Human sensitivity
Robotic modeling and simulation of palletizer robot using Workspace5
 Robotic modeling and simulation of palletizer robot using Workspace5 Nory Afzan Mohd Johari, Habibollah Haron, Abdul Syukor Mohamad Jaya Department of Modeling and Industrial Computing Faculty of Computer
Robotic modeling and simulation of palletizer robot using Workspace5 Nory Afzan Mohd Johari, Habibollah Haron, Abdul Syukor Mohamad Jaya Department of Modeling and Industrial Computing Faculty of Computer
Safety Sensor Technologies Enabling Closer Human- Robot Collaboration. Tom Knauer
 Safety Sensor Technologies Enabling Closer Human- Robot Collaboration Tom Knauer Changing The Paradigm Standards plus Technology are initiating rapid changes in safety sensing and enabling much closer,
Safety Sensor Technologies Enabling Closer Human- Robot Collaboration Tom Knauer Changing The Paradigm Standards plus Technology are initiating rapid changes in safety sensing and enabling much closer,
TECNALIA. Robotics for Advanced Manufacturing. ROBOTT-NET Robotizar Consideraciones a tener en cuenta antes de empezar
 TECNALIA Robotics for Advanced Manufacturing ROBOTT-NET Robotizar Consideraciones a tener en cuenta antes de empezar Damien SALLÉ damien.salle@tecnalia.com Today s reality: The automated production line
TECNALIA Robotics for Advanced Manufacturing ROBOTT-NET Robotizar Consideraciones a tener en cuenta antes de empezar Damien SALLÉ damien.salle@tecnalia.com Today s reality: The automated production line
ONR perspectives on design assessment and licensing of SMRs
 ONR perspectives on design assessment and licensing of SMRs Nuclear Institute June 2016 Craig Reiersen Head of New Reactor Licensing Office for Nuclear Regulation Ana Gomez-Cobo New Reactor Safety Case
ONR perspectives on design assessment and licensing of SMRs Nuclear Institute June 2016 Craig Reiersen Head of New Reactor Licensing Office for Nuclear Regulation Ana Gomez-Cobo New Reactor Safety Case
Introduction to Robotics
 Introduction to Robotics Jee-Hwan Ryu School of Mechanical Engineering Korea University of Technology and Education What is Robot? Robots in our Imagination What is Robot Like in Our Real Life? Origin
Introduction to Robotics Jee-Hwan Ryu School of Mechanical Engineering Korea University of Technology and Education What is Robot? Robots in our Imagination What is Robot Like in Our Real Life? Origin
WHITE PAPER THE CASE FOR AUTOMATION AT COMPANIES OF ANY SIZE. Published by Universal Robots
 WHITE PAPER THE CASE FOR AUTOMATION AT COMPANIES OF ANY SIZE Published by Universal Robots INTRODUCTION Well into the 21 st century, the case for automating manufacturing environments has been made many
WHITE PAPER THE CASE FOR AUTOMATION AT COMPANIES OF ANY SIZE Published by Universal Robots INTRODUCTION Well into the 21 st century, the case for automating manufacturing environments has been made many
Introduzione alla robotica collaborativa. ing. Paolo Bassetti Responsabile supporto tecnico Universal Robots Italia
 Introduzione alla robotica collaborativa ing. Paolo Bassetti Responsabile supporto tecnico Universal Robots Italia Collaborative Robots Application examples: - Cobot and humans working together in the
Introduzione alla robotica collaborativa ing. Paolo Bassetti Responsabile supporto tecnico Universal Robots Italia Collaborative Robots Application examples: - Cobot and humans working together in the
Accessible Power Tool Flexible Application Scalable Solution
 Accessible Power Tool Flexible Application Scalable Solution Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a
Accessible Power Tool Flexible Application Scalable Solution Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a
EU regulatory system for robots
 EU regulatory system for robots CE marking of robots today and in the future Felicia Stoica DG GROW Summary Access to the EU market - marking for robots EU safety laws for robots and role of EN standards
EU regulatory system for robots CE marking of robots today and in the future Felicia Stoica DG GROW Summary Access to the EU market - marking for robots EU safety laws for robots and role of EN standards
QIROX Positioners. Solutions for every component
 QIROX Positioners Solutions for every component Weightlessness! Just as an astronaut can easily move a huge load in zero gravity, QIROX positioners can quickly place your components in exactly the right
QIROX Positioners Solutions for every component Weightlessness! Just as an astronaut can easily move a huge load in zero gravity, QIROX positioners can quickly place your components in exactly the right
ISO INTERNATIONAL STANDARD. Robots for industrial environments Safety requirements Part 1: Robot
 INTERNATIONAL STANDARD ISO 10218-1 First edition 2006-06-01 Robots for industrial environments Safety requirements Part 1: Robot Robots pour environnements industriels Exigences de sécurité Partie 1: Robot
INTERNATIONAL STANDARD ISO 10218-1 First edition 2006-06-01 Robots for industrial environments Safety requirements Part 1: Robot Robots pour environnements industriels Exigences de sécurité Partie 1: Robot
Workshop IROS 2015 Robotic co-workers methods, challenges and industrial test cases
 Björn Matthias, ABB Corporate Research, 2015-09-28 New safety standards for collaborative robots, ABB YuMi dual-arm robot Workshop IROS 2015 Robotic co-workers methods, challenges and industrial test cases
Björn Matthias, ABB Corporate Research, 2015-09-28 New safety standards for collaborative robots, ABB YuMi dual-arm robot Workshop IROS 2015 Robotic co-workers methods, challenges and industrial test cases
Final report. A.TEC.0087 ScribeAssist
 Final report Project code: A.TEC.0087 ScribeAssist Prepared by: Tamim Noorzad Scott Technology Australia Date submitted: November 2012 PUBLISHED BY Meat & Livestock Australia Limited Locked Bag 991 NORTH
Final report Project code: A.TEC.0087 ScribeAssist Prepared by: Tamim Noorzad Scott Technology Australia Date submitted: November 2012 PUBLISHED BY Meat & Livestock Australia Limited Locked Bag 991 NORTH
Challenges for AI: Mobile Robots on Construction Sites. Tim Detert
 Challenges for AI: Mobile Robots on Construction Sites Tim Detert Challenges for AI: Mobile Robots on Construction Sites What will Mobile Robots on Construction Sites be Like? In the future it eventually
Challenges for AI: Mobile Robots on Construction Sites Tim Detert Challenges for AI: Mobile Robots on Construction Sites What will Mobile Robots on Construction Sites be Like? In the future it eventually
What will the robot do during the final demonstration?
 SPENCER Questions & Answers What is project SPENCER about? SPENCER is a European Union-funded research project that advances technologies for intelligent robots that operate in human environments. Such
SPENCER Questions & Answers What is project SPENCER about? SPENCER is a European Union-funded research project that advances technologies for intelligent robots that operate in human environments. Such
Intelligent interaction
 BionicWorkplace: autonomously learning workstation for human-machine collaboration Intelligent interaction Face to face, hand in hand. The BionicWorkplace shows the extent to which human-machine collaboration
BionicWorkplace: autonomously learning workstation for human-machine collaboration Intelligent interaction Face to face, hand in hand. The BionicWorkplace shows the extent to which human-machine collaboration
Standards and Regulations MRSD PROJECT - II
 Standards and Regulations TEAM HARP (TEAM D) MRSD PROJECT - II CARNEGIE MELLON UNIVERSITY ABHISHEK, ALEX, FEROZE, LEKHA, RICK Agenda ANSI/RIA R15.06 Parts 1 (American National Standard for Industrial Robots
Standards and Regulations TEAM HARP (TEAM D) MRSD PROJECT - II CARNEGIE MELLON UNIVERSITY ABHISHEK, ALEX, FEROZE, LEKHA, RICK Agenda ANSI/RIA R15.06 Parts 1 (American National Standard for Industrial Robots
Occupational safety and health through design of human-system interaction in reality and virtual reality
 Occupational safety and health through design of human-system interaction in reality and virtual reality Peter Nickel ISSA Symposium 2015 at ACHEMA, Frankfurt, June 17-18, 2015 ACHEMA 2003 interfaces [Pictures:
Occupational safety and health through design of human-system interaction in reality and virtual reality Peter Nickel ISSA Symposium 2015 at ACHEMA, Frankfurt, June 17-18, 2015 ACHEMA 2003 interfaces [Pictures:
Subject Description Form. Industrial Centre Training I for EIE. Upon completion of the subject, students will be able to:
 Subject Description Form Subject Code Subject Title Credit Value IC2114 Industrial Centre Training I for EIE 5 training credits Level 2 Pre-requisite/ Co-requisite/ Exclusion Objectives Intended Subject
Subject Description Form Subject Code Subject Title Credit Value IC2114 Industrial Centre Training I for EIE 5 training credits Level 2 Pre-requisite/ Co-requisite/ Exclusion Objectives Intended Subject
H2020 RIA COMANOID H2020-RIA
 Ref. Ares(2016)2533586-01/06/2016 H2020 RIA COMANOID H2020-RIA-645097 Deliverable D4.1: Demonstrator specification report M6 D4.1 H2020-RIA-645097 COMANOID M6 Project acronym: Project full title: COMANOID
Ref. Ares(2016)2533586-01/06/2016 H2020 RIA COMANOID H2020-RIA-645097 Deliverable D4.1: Demonstrator specification report M6 D4.1 H2020-RIA-645097 COMANOID M6 Project acronym: Project full title: COMANOID
Collaborative Robots Risk Assessment
 Collaborative Robots Risk Assessment Safe Applications Requirements Risk Reduction Direct Power Control 1 WHITEPAPER Collabora ve Robot Risk Assessment Description collaborative robot as a robot designed
Collaborative Robots Risk Assessment Safe Applications Requirements Risk Reduction Direct Power Control 1 WHITEPAPER Collabora ve Robot Risk Assessment Description collaborative robot as a robot designed
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
BUILT IN SAFETY SYSTEM CE APPROVED SMALL AND SMART CALL ME COWELDER 1 A COLLABORATIVE WELDING ROBOT
 BUILT IN SAFETY SYSTEM CE APPROVED...... SMALL AND SMART CALL ME COWELDER 1 A COLLABORATIVE WELDING ROBOT CONTENT A new welding assistant 3 Technical data welding machines 4 Technical data UR5 5 CoWelder
BUILT IN SAFETY SYSTEM CE APPROVED...... SMALL AND SMART CALL ME COWELDER 1 A COLLABORATIVE WELDING ROBOT CONTENT A new welding assistant 3 Technical data welding machines 4 Technical data UR5 5 CoWelder
Safe set up of cobots in industry: Research status in Québec and multidisciplinary perspective
 Safe set up of cobots in industry: Research status in Québec and multidisciplinary perspective Laurent GIRAUD, ing. Ph. D. Sébastien BRUÈRE, ergonome Ph. D. Denys Denis, chercheur-ergonome Ph. D. Sabrina
Safe set up of cobots in industry: Research status in Québec and multidisciplinary perspective Laurent GIRAUD, ing. Ph. D. Sébastien BRUÈRE, ergonome Ph. D. Denys Denis, chercheur-ergonome Ph. D. Sabrina
Industry 4.0. Advanced and integrated SAFETY tools for tecnhical plants
 Industry 4.0 Advanced and integrated SAFETY tools for tecnhical plants Industry 4.0 Industry 4.0 is the digital transformation of manufacturing; leverages technologies, such as Big Data and Internet of
Industry 4.0 Advanced and integrated SAFETY tools for tecnhical plants Industry 4.0 Industry 4.0 is the digital transformation of manufacturing; leverages technologies, such as Big Data and Internet of
Computer-Aided Safety and Risk Prevention Pushing collaborative robotics from isolated pilots to large scale deployment
 Pushing collaborative robotics from isolated pilots to large scale deployment INRS, Nancy, France J. Saenz, C. Vogel, R. Behrens, E. Schulenburg, C. Walter, N. Elkmann 30.03.2017 Fraunhofer IFF Fraunhofer
Pushing collaborative robotics from isolated pilots to large scale deployment INRS, Nancy, France J. Saenz, C. Vogel, R. Behrens, E. Schulenburg, C. Walter, N. Elkmann 30.03.2017 Fraunhofer IFF Fraunhofer
THINK IN NEW DIMENSIONS. Software & Services for Industrialised Construction
 THINK IN NEW DIMENSIONS Software & Services for Industrialised Construction O P E N B I M Integrated planning The objective of an integrated planning is the consistency of data and information throughout
THINK IN NEW DIMENSIONS Software & Services for Industrialised Construction O P E N B I M Integrated planning The objective of an integrated planning is the consistency of data and information throughout
Franka Emika GmbH. Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient.
 Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a technology accessible only to few. The reasons for this are the
Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a technology accessible only to few. The reasons for this are the
Introduction to HCI. CS4HC3 / SE4HC3/ SE6DO3 Fall Instructor: Kevin Browne
 Introduction to HCI CS4HC3 / SE4HC3/ SE6DO3 Fall 2011 Instructor: Kevin Browne brownek@mcmaster.ca Slide content is based heavily on Chapter 1 of the textbook: Designing the User Interface: Strategies
Introduction to HCI CS4HC3 / SE4HC3/ SE6DO3 Fall 2011 Instructor: Kevin Browne brownek@mcmaster.ca Slide content is based heavily on Chapter 1 of the textbook: Designing the User Interface: Strategies
Introduction to Robotics in CIM Systems
 Introduction to Robotics in CIM Systems Fifth Edition James A. Rehg The Pennsylvania State University Altoona, Pennsylvania Prentice Hall Upper Saddle River, New Jersey Columbus, Ohio Contents Introduction
Introduction to Robotics in CIM Systems Fifth Edition James A. Rehg The Pennsylvania State University Altoona, Pennsylvania Prentice Hall Upper Saddle River, New Jersey Columbus, Ohio Contents Introduction
Softing TDX ODX- and OTX-Based Diagnostic System Framework
 Softing TDX ODX- and OTX-Based Diagnostic System Framework DX (Open Diagnostic data exchange) and OTX (Open Test sequence exchange) standards are very well established description formats for diagnostics
Softing TDX ODX- and OTX-Based Diagnostic System Framework DX (Open Diagnostic data exchange) and OTX (Open Test sequence exchange) standards are very well established description formats for diagnostics
Theme 2: The new paradigm in robotics safety
 Competitiveness in Emerging Robot Technologies (CEROBOT) The opportunities in safety and robots for SMEs Theme 2: The new paradigm in robotics safety Colin Blackman Simon Forge SCF Associates Ltd Safety
Competitiveness in Emerging Robot Technologies (CEROBOT) The opportunities in safety and robots for SMEs Theme 2: The new paradigm in robotics safety Colin Blackman Simon Forge SCF Associates Ltd Safety
Control Room Consoles
 Control Room Consoles FREE ON-SITE CONSULTATION We understand that every installation is unique and we can gather valuable information by visiting the actual site. We are committed to getting it right
Control Room Consoles FREE ON-SITE CONSULTATION We understand that every installation is unique and we can gather valuable information by visiting the actual site. We are committed to getting it right
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
Applying Robotic Technologies to Improve Manufacturing Processes
 Applying Robotic Technologies to Improve Manufacturing Processes CrossRobotics.com What Can You Automate? Use Our Expertise to Configure Your Entire Robotic Cell If you ve always thought robotic automation
Applying Robotic Technologies to Improve Manufacturing Processes CrossRobotics.com What Can You Automate? Use Our Expertise to Configure Your Entire Robotic Cell If you ve always thought robotic automation
Robotics as it should be Simple Flexible Affordable
 Robotics as it should be Simple Flexible Affordable TECHNICAL SPECIFICATIONS: www.universal-robots.com/products 195 PERIOD DAYS AVERAGE PAYBACK Robotics Is Finally Within Your Reach Universal Robots offers
Robotics as it should be Simple Flexible Affordable TECHNICAL SPECIFICATIONS: www.universal-robots.com/products 195 PERIOD DAYS AVERAGE PAYBACK Robotics Is Finally Within Your Reach Universal Robots offers
5th-discipline Digital IQ assessment
 5th-discipline Digital IQ assessment Report for OwnVentures BV Thursday 10th of January 2019 Your company Initiator Participated colleagues OwnVentures BV Amir Sabirovic 2 Copyright 2019-5th Discipline
5th-discipline Digital IQ assessment Report for OwnVentures BV Thursday 10th of January 2019 Your company Initiator Participated colleagues OwnVentures BV Amir Sabirovic 2 Copyright 2019-5th Discipline
FANUC Collaborative Robot Technology and GM Applications
 FANUC Collaborative Robot Technology and GM Applications Greg Buell Fanuc America Chris Ihrke General Motors Spare Tire Application Perennial ergonomic and safety concern Productivity issue Wanted a low
FANUC Collaborative Robot Technology and GM Applications Greg Buell Fanuc America Chris Ihrke General Motors Spare Tire Application Perennial ergonomic and safety concern Productivity issue Wanted a low
My Company. Simply Safe.
 More inside. All from a single source. In order to offer tailor-made services regionally and internationally, we have organized the TÜV AUSTRIA Group into four business areas: Industry & Energy Infrastructure
More inside. All from a single source. In order to offer tailor-made services regionally and internationally, we have organized the TÜV AUSTRIA Group into four business areas: Industry & Energy Infrastructure
Turning low carbon propulsion technologies into products developed in the UK
 Turning low carbon propulsion technologies into products developed in the UK Developments in Transmission and Driveline Technology 27 th January 2015 Garry Wilson, Director Business Development Origins
Turning low carbon propulsion technologies into products developed in the UK Developments in Transmission and Driveline Technology 27 th January 2015 Garry Wilson, Director Business Development Origins
Improve the Ergonomic Experience with Pressure Mapping
 Improve the Ergonomic Experience with Pressure Mapping A Technical Overview Demonstrating How Capturing Pressure Profile Data Can Help Design Engineers Create More Comfortable Products Table of Contents
Improve the Ergonomic Experience with Pressure Mapping A Technical Overview Demonstrating How Capturing Pressure Profile Data Can Help Design Engineers Create More Comfortable Products Table of Contents
ROBOTS. In SEAT, it is easy to be left astounded
 ANNUAL REPORT 2016 HIGHLY PERSONAL ROBOTS The road to manufacturing 4.0 includes the development of the most advanced technology. SEAT is one of the companies that wants to lead and interpret this new
ANNUAL REPORT 2016 HIGHLY PERSONAL ROBOTS The road to manufacturing 4.0 includes the development of the most advanced technology. SEAT is one of the companies that wants to lead and interpret this new
Draft executive summaries to target groups on industrial energy efficiency and material substitution in carbonintensive
 Technology Executive Committee 29 August 2017 Fifteenth meeting Bonn, Germany, 12 15 September 2017 Draft executive summaries to target groups on industrial energy efficiency and material substitution
Technology Executive Committee 29 August 2017 Fifteenth meeting Bonn, Germany, 12 15 September 2017 Draft executive summaries to target groups on industrial energy efficiency and material substitution
EU-Guide Machinery Directive
 EU-Guide Machinery Directive Interpretation? 2006/42/EC Legal update? EU-Guide Machinery Directive Machinery Days Cologne 2017 25 th October 2017 Maritim Hotel Cologne Edition 2.1 July 2017 (Update of
EU-Guide Machinery Directive Interpretation? 2006/42/EC Legal update? EU-Guide Machinery Directive Machinery Days Cologne 2017 25 th October 2017 Maritim Hotel Cologne Edition 2.1 July 2017 (Update of
Robotics as it should be Simple Flexible Affordable
 Robotics as it should be Simple Flexible Affordable TECHNICAL SPECIFICATIONS: www.universal-robots.com/products Robotics Is Finally Within Universal Robots offers significant productivity and safety advantages,
Robotics as it should be Simple Flexible Affordable TECHNICAL SPECIFICATIONS: www.universal-robots.com/products Robotics Is Finally Within Universal Robots offers significant productivity and safety advantages,
THE FIRST COLLABORATIVE ROBOT THAT REPORTS STRAIGHT TO YOUR WRIST
 THE FIRST COLLABORATIVE ROBOT THAT REPORTS STRAIGHT TO YOUR WRIST PULSE ROBOTIC ARM THE FIRST COLLABORATIVE ROBOT THAT REPORTS STRAIGHT TO YOUR WRIST PULSE is a new-generation robotic arm that welcomes
THE FIRST COLLABORATIVE ROBOT THAT REPORTS STRAIGHT TO YOUR WRIST PULSE ROBOTIC ARM THE FIRST COLLABORATIVE ROBOT THAT REPORTS STRAIGHT TO YOUR WRIST PULSE is a new-generation robotic arm that welcomes
Understanding Computer Aided Drawing (CAD) Unit Level: Unit Credit Value: 7 GLH: 50 AIM Awards Unit Code: CQ8/2/EA/002 Unique Reference A/600/2374
 Unit Level: Unit Credit Value: 7 GLH: 50 AIM Awards Unit Code: CQ8/2/EA/002 Unique Reference A/600/2374") This unit has 5 learning outcomes 1. Understand the risks to health and safety resulting from the use of computer equipment 1.1. Use the computer equipment and peripheral devices safely 1.2. Identify the
This unit has 5 learning outcomes 1. Understand the risks to health and safety resulting from the use of computer equipment 1.1. Use the computer equipment and peripheral devices safely 1.2. Identify the
Robot Task-Level Programming Language and Simulation
 Robot Task-Level Programming Language and Simulation M. Samaka Abstract This paper presents the development of a software application for Off-line robot task programming and simulation. Such application
Robot Task-Level Programming Language and Simulation M. Samaka Abstract This paper presents the development of a software application for Off-line robot task programming and simulation. Such application
About SIMTech Pre-requisites Benefits
 About SIMTech The Singapore Institute of Manufacturing Technology (SIMTech) is a research institute of the Science and Engineering Research Council (SERC) of the Agency for Science, Technology and Research
About SIMTech The Singapore Institute of Manufacturing Technology (SIMTech) is a research institute of the Science and Engineering Research Council (SERC) of the Agency for Science, Technology and Research
TX40. 6 axis industrial robot
 TX40 6 axis industrial robot A unique 4 axis and 6 axis robot range for all applications Whenever industrial companies need speed, Designed to work in the most hostile repeatability and reliability, Stäubli
TX40 6 axis industrial robot A unique 4 axis and 6 axis robot range for all applications Whenever industrial companies need speed, Designed to work in the most hostile repeatability and reliability, Stäubli
Available online at ScienceDirect. Procedia CIRP 63 (2017 ) The 50th CIRP Conference on Manufacturing Systems
 The 50th CIRP Conference on Manufacturing Systems") Available online at www.sciencedirect.com ScienceDirect Procedia CIRP 63 (2017 ) 430 435 The 50th CIRP Conference on Manufacturing Systems Safe Assembly Cell Layout through risk assessment An Application
Available online at www.sciencedirect.com ScienceDirect Procedia CIRP 63 (2017 ) 430 435 The 50th CIRP Conference on Manufacturing Systems Safe Assembly Cell Layout through risk assessment An Application
An Integrated Simulation Method to Support Virtual Factory Engineering
 International Journal of CAD/CAM Vol. 2, No. 1, pp. 39~44 (2002) An Integrated Simulation Method to Support Virtual Factory Engineering Zhai, Wenbin*, Fan, xiumin, Yan, Juanqi, and Zhu, Pengsheng Inst.
International Journal of CAD/CAM Vol. 2, No. 1, pp. 39~44 (2002) An Integrated Simulation Method to Support Virtual Factory Engineering Zhai, Wenbin*, Fan, xiumin, Yan, Juanqi, and Zhu, Pengsheng Inst.
FANUC America Demonstrates Spot Welding with its Gakushu (Learning) Robots
 Robots") FANUC America Demonstrates Spot Welding with its Gakushu (Learning) Robots at IMTS 2014 For Immediate Release ROCHESTER HILLS, Mich., Sept. 8, 2014 FANUC America Corporation demonstrates spot welding with
FANUC America Demonstrates Spot Welding with its Gakushu (Learning) Robots at IMTS 2014 For Immediate Release ROCHESTER HILLS, Mich., Sept. 8, 2014 FANUC America Corporation demonstrates spot welding with
Robot Assessment Report
 Robot Assessment Report Report Date 2009-05-27 Report Responsible Customer Information Company Name Address N/A Location N/A Controller Information Controllers S/N 66-33752 Controller Time (Hours) 20800
Robot Assessment Report Report Date 2009-05-27 Report Responsible Customer Information Company Name Address N/A Location N/A Controller Information Controllers S/N 66-33752 Controller Time (Hours) 20800
The safe & productive robot working without fences
 The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The safe & productive robot working without fences Final Presentation, Stuttgart, May 5 th, 2009 Objectives
The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The safe & productive robot working without fences Final Presentation, Stuttgart, May 5 th, 2009 Objectives
Safe Human-Robot Co-Existence
 Safe Human-Robot Co-Existence Aaron Pereira TU München February 3, 2016 Aaron Pereira Preliminary Lecture February 3, 2016 1 / 17 Overview Course Aim (Learning Outcomes) You understand the challenges behind
Safe Human-Robot Co-Existence Aaron Pereira TU München February 3, 2016 Aaron Pereira Preliminary Lecture February 3, 2016 1 / 17 Overview Course Aim (Learning Outcomes) You understand the challenges behind
KI-SUNG SUH USING NAO INTRODUCTION TO INTERACTIVE HUMANOID ROBOTS
 KI-SUNG SUH USING NAO INTRODUCTION TO INTERACTIVE HUMANOID ROBOTS 2 WORDS FROM THE AUTHOR Robots are both replacing and assisting people in various fields including manufacturing, extreme jobs, and service
KI-SUNG SUH USING NAO INTRODUCTION TO INTERACTIVE HUMANOID ROBOTS 2 WORDS FROM THE AUTHOR Robots are both replacing and assisting people in various fields including manufacturing, extreme jobs, and service
Our position. ICDPPC declaration on ethics and data protection in artificial intelligence
 ICDPPC declaration on ethics and data protection in artificial intelligence AmCham EU speaks for American companies committed to Europe on trade, investment and competitiveness issues. It aims to ensure
ICDPPC declaration on ethics and data protection in artificial intelligence AmCham EU speaks for American companies committed to Europe on trade, investment and competitiveness issues. It aims to ensure
Designing Better Industrial Robots with Adams Multibody Simulation Software
 Designing Better Industrial Robots with Adams Multibody Simulation Software MSC Software: Designing Better Industrial Robots with Adams Multibody Simulation Software Introduction Industrial robots are
Designing Better Industrial Robots with Adams Multibody Simulation Software MSC Software: Designing Better Industrial Robots with Adams Multibody Simulation Software Introduction Industrial robots are
Applying Robotic Technologies to Improve Manufacturing Processes
 Applying Robotic Technologies to Improve Manufacturing Processes CrossRobotics.com What Can You Automate? Use Our Expertise to Configure Your Entire Robotic Cell If you ve always thought robotic automation
Applying Robotic Technologies to Improve Manufacturing Processes CrossRobotics.com What Can You Automate? Use Our Expertise to Configure Your Entire Robotic Cell If you ve always thought robotic automation
Square Shear Beam Mounting Guidelines
 Issue Date: January 2016 Please Retain for Future Reference 2016-01-11 Square Shear Beam Mounting Guidelines Subject: Square Shear Beam Recommendations Introduction: Even though Digi-Star load cells are
Issue Date: January 2016 Please Retain for Future Reference 2016-01-11 Square Shear Beam Mounting Guidelines Subject: Square Shear Beam Recommendations Introduction: Even though Digi-Star load cells are
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE. Imagine Your Business...better. Automate Virtually Anything jhfoster.
 John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
COLLABORATIVE WORK BETWEEN HUMAN AND INDUSTRIAL ROBOT IN MANUFACTURING BY ADVANCED SAFETY MONITORING SYSTEM
 DOI: 10.2507/28th.daaam.proceedings.138 COLLABORATIVE WORK BETWEEN HUMAN AND INDUSTRIAL ROBOT IN MANUFACTURING BY ADVANCED SAFETY MONITORING SYSTEM Vladimir Kuts, Martins Sarkans, Tauno Otto, Toivo Tähemaa
DOI: 10.2507/28th.daaam.proceedings.138 COLLABORATIVE WORK BETWEEN HUMAN AND INDUSTRIAL ROBOT IN MANUFACTURING BY ADVANCED SAFETY MONITORING SYSTEM Vladimir Kuts, Martins Sarkans, Tauno Otto, Toivo Tähemaa
PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES
 Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Software update news about digital manufacturing tools and software
 s Software update news about digital manufacturing tools and software Chahe Bakmazjian Business Team Leader Hypertherm Robotic Software Laurent, Quebec, Canada www.robotmaster.com Programming Robots Gets
s Software update news about digital manufacturing tools and software Chahe Bakmazjian Business Team Leader Hypertherm Robotic Software Laurent, Quebec, Canada www.robotmaster.com Programming Robots Gets
Case Study - Safeguarding. Case Study Safeguarding
 Case Study - Safeguarding Paul Santi Director - Engineering FANUC America Corp. October 14 th 16 th, 2013 ~ Indianapolis, Indiana USA Case Study Safeguarding Professional Background: Mechanical Engineering
Case Study - Safeguarding Paul Santi Director - Engineering FANUC America Corp. October 14 th 16 th, 2013 ~ Indianapolis, Indiana USA Case Study Safeguarding Professional Background: Mechanical Engineering
Industrial Graphics Skills SAS 2015
 Sample unit of work Residential renovations and extensions The sample unit of work provides teaching strategies and learning experiences that facilitate students demonstration of the dimensions and objectives
Sample unit of work Residential renovations and extensions The sample unit of work provides teaching strategies and learning experiences that facilitate students demonstration of the dimensions and objectives
Producing mechanical engineering drawings using a CAD system
 Unit 804 Producing mechanical engineering drawings using a CAD system UAN: J/600/5794 Level: Level 2 Credit value: 11 GLH: 61 Relationship to NOS: This unit has been derived from national occupational
Unit 804 Producing mechanical engineering drawings using a CAD system UAN: J/600/5794 Level: Level 2 Credit value: 11 GLH: 61 Relationship to NOS: This unit has been derived from national occupational
The Essential Eight technologies Robotics
 The Essential Eight technologies Robotics Robotics are changing the way companies do business. What should boards know? Companies across all industries are using, investing in or planning to invest in
The Essential Eight technologies Robotics Robotics are changing the way companies do business. What should boards know? Companies across all industries are using, investing in or planning to invest in
AUTOCOM VEHICLE INSPECTION SERVICES
 AUTOCOM VEHICLE INSPECTION SERVICES Our business area Vehicle Inspection Services, was developed in order to offer our knowledge and services to join forces with you, our customer, and conceive the vehicle
AUTOCOM VEHICLE INSPECTION SERVICES Our business area Vehicle Inspection Services, was developed in order to offer our knowledge and services to join forces with you, our customer, and conceive the vehicle
We are specialized in steel processing, especially for home appliances and the furniture field, from design to manufacturing and installation
 We are specialized in steel processing, especially for home appliances and the furniture field, from design to manufacturing and installation MEP towards INDUSTRY 4.0 We have launched an investment plan
We are specialized in steel processing, especially for home appliances and the furniture field, from design to manufacturing and installation MEP towards INDUSTRY 4.0 We have launched an investment plan
SIX THETA ACHIEVE A STRONGER AND MORE EFFICIENT SUPPLY CHAIN WITH SIX THETA. 28 November 2017
 SIX THETA ACHIEVE A STRONGER AND MORE EFFICIENT SUPPLY CHAIN WITH SIX THETA 28 November 2017 VALCON LEAVES GLOBAL FOOTPRINTS Established Annual growth rate Employees Operating countries 2000 15% +200 38
SIX THETA ACHIEVE A STRONGER AND MORE EFFICIENT SUPPLY CHAIN WITH SIX THETA 28 November 2017 VALCON LEAVES GLOBAL FOOTPRINTS Established Annual growth rate Employees Operating countries 2000 15% +200 38
KR C4 Training courses. Overview of training courses KUKA Automatisering + Robots N.V (replaces ) Valid for 2018
 Valid for 2018") KR C4 Training courses Overview of training courses 2018-01-10 (replaces 2016-10-02) Valid for 2018 College To ensure that the skills of the workforce keep pace with technical developments, training is
KR C4 Training courses Overview of training courses 2018-01-10 (replaces 2016-10-02) Valid for 2018 College To ensure that the skills of the workforce keep pace with technical developments, training is
SWT 200 Wide-Belt Sanding Machines
 SWT 200 Wide-Belt Sanding Machines 2016/2017 Discover the possibilities. The BÜTFERING SWT 200. For almost 70 years the BÜTFERING brand has stood for high performance wide-belt sanding machines and innovative
SWT 200 Wide-Belt Sanding Machines 2016/2017 Discover the possibilities. The BÜTFERING SWT 200. For almost 70 years the BÜTFERING brand has stood for high performance wide-belt sanding machines and innovative