Motion planning in mobile robots. Britta Schulte 3. November 2014
|
|
|
- Cori Parks
- 5 years ago
- Views:
Transcription
1 Motion planning in mobile robots Britta Schulte 3. November 2014
2 Motion planning in mobile robots Introduction Basic Problem and Configuration Space Planning Algorithms Roadmap Cell Decomposition Potential Field Problem Variants Example of Use: AI System of Left4Dead


3 Introduction Applications of motion planning
4 The Basic Problem The robot is the only moving object The robot is a rigid object The workspace includes obstacles The geometry of the robot and the obstacles is known There are no motion constraints Given a start and goal position generate a continuous path without collision.
5 Configuration Space 2D represantation Robot is represented as a point Obstacles are mapped Inflation of objects by the robot s radius
6 Planning Algorithms Strategies to transform the continuous environment into a discrete map Complete algorithm: returns a path if one exists, returns failure otheriwse
7 Roadmap method Representation of space: 1D line (road) network Path: Series of roads that conenct start and goal position

8 Roadmap: Visibility Graph
9 Roadmap: Visibility Graph + Simple implementation + Efficient in sparse environments + Creates a path of optimal length Size increases with number of obstacles Slow in populated environments Robot is as close as possible to obstacles safety is sacrificed solution: grow obstacles by more than the robot s radius or modify the path away from obstacles Complete

10 Roadmap: Vonoroi Diagram
11 Roadmap: Vonoroi Diagram + Paths can be followed easily with range sensors + Automatic mapping of the environment via moving along unknown edges Complete Much less than optimal length Poor localization of robots with short ranged sesors solution: use visibility graph to keep robot close enough to obstacles
12 Cell Decomposition Discriminate between free and occupied areas Divide space into cells Adjacent free cells constitute the connectivity graph Find a series of cells that connect start and goal Connect cells through their mid points
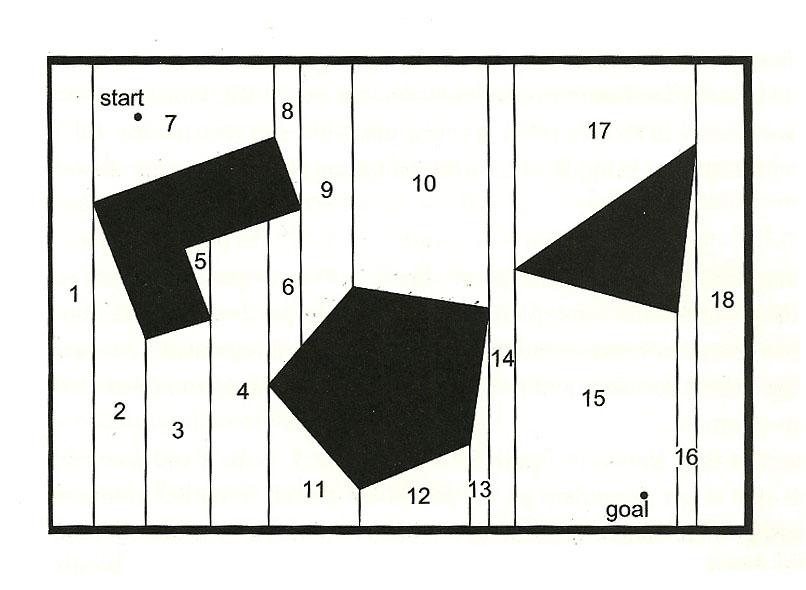
13 Exact Cell Decomposition
14 Exact Cell Decomposition + Sparse/large environment few cells high efficiency Efficiency decreases with density of obstacles Complex implementation Complete

15 Approximate Cell Decomposition
16 Approximate Cell Decomposition + Adapts to complexity of environment (sparse fewer cells less memory needed) Representing a complete environment is memory intensive Not Complete (possibly Resolution Complete )

17 Potential Field
18 Potential Field + Very efficient + Easy to implement Potential to get trapped in local minima solution: design a function that avoids local minima or design a mechanism to escape local minima Usually incomplete

19 Problem Variants Multiple robots in one workspace
20 Moving Obstacles Time as a dimension in configuration space configuration-time-space Specifies robot s position for each point in time Difficulty depends on kinematic constraints and knowledge about the object s movement
21 Multiple Robots Difference from moving obstacles: not under control vs. Planned Centralized planning: multiple robots as one multibodied robot configuration space = product of each robot s config. space Decoupled planning: plan wach robot s motion independently second planning phase for interaction less computation vs. less completeness
22 Artculated Robots E.g. robot arm objects/links connected by joints Config. space = product of object s config. Spaces Angle of joint = added parameter Config space grows with number of objects
23 Kinematic Constraints Holonomic constraints: Dependency of parameters of config. Space Nonholonomic constraints: Restrict possible motions at any configuration
24 Uncertainty Little/no knowledge about workspace Sensors needed to optain information Exploration required Less knowledge planning less important
25 Movable objects Using motion commands to solve intermediate problems Transit happens in config. space Transfer happens in the geometry

26 Exmple of Use: AI System of Left4Dead

27 Exmple of Use: AI System of Left4Dead Navigation Meshes
28 Exmple of Use: AI System of Left4Dead Planning Algorith A* Function: f(n) = g(n) + h(n) Process: 1. mark initial node expand adjacent nodes 2. calculate function value for each node sort nodes identify node of minimum cost 3. repeat for subsequent nodes until target node is reached
29 Exmple of Use: AI System of Left4Dead A* creates jagged path fluid motion is desired
30 Exmple of Use: AI System of Left4Dead Possible solution: Path optimization Creates a direct path Needs to be recomputed often Still jagged
31 Exmple of Use: AI System of Left4Dead Actual solution:
32 Exmple of Use: AI System of Left4Dead Actual solution:

33 Exmple of Use: AI System of Left4Dead Actual solution:
34 Exmple of Use: AI System of Left4Dead Actual solution:
35 Exmple of Use: AI System of Left4Dead Actual solution:
36 Exmple of Use: AI System of Left4Dead Actual solution:
37 Exmple of Use: AI System of Left4Dead Actual solution:
38 Exmple of Use: AI System of Left4Dead Actual solution:
39 Exmple of Use: AI System of Left4Dead Actual solution:
40 Exmple of Use: AI System of Left4Dead Actual solution:
41 Exmple of Use: AI System of Left4Dead Actual solution:
42 Exmple of Use: AI System of Left4Dead Actual solution:
43 Exmple of Use: AI System of Left4Dead Actual solution:
44 Exmple of Use: AI System of Left4Dead Actual solution: Movement towards a point of the path in the direction of view Cheap re-pathing Avoiding obstacles can lead into different area re-pathing
45 Exmple of Use: AI System of Left4Dead Fluid Motion Close to optimized path
CS123. Programming Your Personal Robot. Part 3: Reasoning Under Uncertainty
 CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty This Week (Week 2 of Part 3) Part 3-3 Basic Introduction of Motion Planning Several Common Motion Planning Methods Plan Execution
CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty This Week (Week 2 of Part 3) Part 3-3 Basic Introduction of Motion Planning Several Common Motion Planning Methods Plan Execution
E190Q Lecture 15 Autonomous Robot Navigation
 E190Q Lecture 15 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2014 1 Figures courtesy of Probabilistic Robotics (Thrun et. Al.) Control Structures Planning Based Control Prior Knowledge
E190Q Lecture 15 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2014 1 Figures courtesy of Probabilistic Robotics (Thrun et. Al.) Control Structures Planning Based Control Prior Knowledge
Robot Motion Control and Planning
 Robot Motion Control and Planning http://www.cs.bilkent.edu.tr/~saranli/courses/cs548 Lecture 1 Introduction and Logistics Uluç Saranlı http://www.cs.bilkent.edu.tr/~saranli CS548 - Robot Motion Control
Robot Motion Control and Planning http://www.cs.bilkent.edu.tr/~saranli/courses/cs548 Lecture 1 Introduction and Logistics Uluç Saranlı http://www.cs.bilkent.edu.tr/~saranli CS548 - Robot Motion Control
CS123. Programming Your Personal Robot. Part 3: Reasoning Under Uncertainty
 CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty Topics For Part 3 3.1 The Robot Programming Problem What is robot programming Challenges Real World vs. Virtual World Mapping and
CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty Topics For Part 3 3.1 The Robot Programming Problem What is robot programming Challenges Real World vs. Virtual World Mapping and
the question of whether computers can think is like the question of whether submarines can swim -- Dijkstra
 the question of whether computers can think is like the question of whether submarines can swim -- Dijkstra Game AI: The set of algorithms, representations, tools, and tricks that support the creation
the question of whether computers can think is like the question of whether submarines can swim -- Dijkstra Game AI: The set of algorithms, representations, tools, and tricks that support the creation
Robot Motion Planning
 Robot Motion Planning Dinesh Manocha dm@cs.unc.edu The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL Robots are used everywhere HRP4C humanoid Swarm robots da vinci Big dog MEMS bugs Snake robot 2 The UNIVERSITY
Robot Motion Planning Dinesh Manocha dm@cs.unc.edu The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL Robots are used everywhere HRP4C humanoid Swarm robots da vinci Big dog MEMS bugs Snake robot 2 The UNIVERSITY
Motion Planning in Dynamic Environments
 Motion Planning in Dynamic Environments Trajectory Following, D*, Gyroscopic Forces MEM380: Applied Autonomous Robots I 2012 1 Trajectory Following Assume Unicycle model for robot (x, y, θ) v = v const
Motion Planning in Dynamic Environments Trajectory Following, D*, Gyroscopic Forces MEM380: Applied Autonomous Robots I 2012 1 Trajectory Following Assume Unicycle model for robot (x, y, θ) v = v const
The safe & productive robot working without fences
 The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The safe & productive robot working without fences Final Presentation, Stuttgart, May 5 th, 2009 Objectives
The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The safe & productive robot working without fences Final Presentation, Stuttgart, May 5 th, 2009 Objectives
Randomized Motion Planning for Groups of Nonholonomic Robots
 Randomized Motion Planning for Groups of Nonholonomic Robots Christopher M Clark chrisc@sun-valleystanfordedu Stephen Rock rock@sun-valleystanfordedu Department of Aeronautics & Astronautics Stanford University
Randomized Motion Planning for Groups of Nonholonomic Robots Christopher M Clark chrisc@sun-valleystanfordedu Stephen Rock rock@sun-valleystanfordedu Department of Aeronautics & Astronautics Stanford University
Transactions on Information and Communications Technologies vol 6, 1994 WIT Press, ISSN
 Application of artificial neural networks to the robot path planning problem P. Martin & A.P. del Pobil Department of Computer Science, Jaume I University, Campus de Penyeta Roja, 207 Castellon, Spain
Application of artificial neural networks to the robot path planning problem P. Martin & A.P. del Pobil Department of Computer Science, Jaume I University, Campus de Penyeta Roja, 207 Castellon, Spain
Artificial Neural Network based Mobile Robot Navigation
 Artificial Neural Network based Mobile Robot Navigation István Engedy Budapest University of Technology and Economics, Department of Measurement and Information Systems, Magyar tudósok körútja 2. H-1117,
Artificial Neural Network based Mobile Robot Navigation István Engedy Budapest University of Technology and Economics, Department of Measurement and Information Systems, Magyar tudósok körútja 2. H-1117,
the question of whether computers can think is like the question of whether submarines can swim -- Dijkstra
 the question of whether computers can think is like the question of whether submarines can swim -- Dijkstra Game AI: The set of algorithms, representations, tools, and tricks that support the creation
the question of whether computers can think is like the question of whether submarines can swim -- Dijkstra Game AI: The set of algorithms, representations, tools, and tricks that support the creation
A Probabilistic Method for Planning Collision-free Trajectories of Multiple Mobile Robots
 A Probabilistic Method for Planning Collision-free Trajectories of Multiple Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany
A Probabilistic Method for Planning Collision-free Trajectories of Multiple Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany
Development of a Sensor-Based Approach for Local Minima Recovery in Unknown Environments
 Development of a Sensor-Based Approach for Local Minima Recovery in Unknown Environments Danial Nakhaeinia 1, Tang Sai Hong 2 and Pierre Payeur 1 1 School of Electrical Engineering and Computer Science,
Development of a Sensor-Based Approach for Local Minima Recovery in Unknown Environments Danial Nakhaeinia 1, Tang Sai Hong 2 and Pierre Payeur 1 1 School of Electrical Engineering and Computer Science,
Adaptive Neuro-Fuzzy Controler With Genetic Training For Mobile Robot Control
 Int. J. of Computers, Communications & Control, ISSN 1841-9836, E-ISSN 1841-9844 Vol. VII (2012), No. 1 (March), pp. 135-146 Adaptive Neuro-Fuzzy Controler With Genetic Training For Mobile Robot Control
Int. J. of Computers, Communications & Control, ISSN 1841-9836, E-ISSN 1841-9844 Vol. VII (2012), No. 1 (March), pp. 135-146 Adaptive Neuro-Fuzzy Controler With Genetic Training For Mobile Robot Control
AIMA 3.5. Smarter Search. David Cline
 AIMA 3.5 Smarter Search David Cline Uninformed search Depth-first Depth-limited Iterative deepening Breadth-first Bidirectional search None of these searches take into account how close you are to the
AIMA 3.5 Smarter Search David Cline Uninformed search Depth-first Depth-limited Iterative deepening Breadth-first Bidirectional search None of these searches take into account how close you are to the
Wireless Robust Robots for Application in Hostile Agricultural. environment.
 Wireless Robust Robots for Application in Hostile Agricultural Environment A.R. Hirakawa, A.M. Saraiva, C.E. Cugnasca Agricultural Automation Laboratory, Computer Engineering Department Polytechnic School,
Wireless Robust Robots for Application in Hostile Agricultural Environment A.R. Hirakawa, A.M. Saraiva, C.E. Cugnasca Agricultural Automation Laboratory, Computer Engineering Department Polytechnic School,
Foundations of AI. 3. Solving Problems by Searching. Problem-Solving Agents, Formulating Problems, Search Strategies
 Foundations of AI 3. Solving Problems by Searching Problem-Solving Agents, Formulating Problems, Search Strategies Luc De Raedt and Wolfram Burgard and Bernhard Nebel Contents Problem-Solving Agents Formulating
Foundations of AI 3. Solving Problems by Searching Problem-Solving Agents, Formulating Problems, Search Strategies Luc De Raedt and Wolfram Burgard and Bernhard Nebel Contents Problem-Solving Agents Formulating
Rethinking CAD. Brent Stucker, Univ. of Louisville Pat Lincoln, SRI
 Rethinking CAD Brent Stucker, Univ. of Louisville Pat Lincoln, SRI The views expressed are those of the author and do not reflect the official policy or position of the Department of Defense or the U.S.
Rethinking CAD Brent Stucker, Univ. of Louisville Pat Lincoln, SRI The views expressed are those of the author and do not reflect the official policy or position of the Department of Defense or the U.S.
Improvement of Robot Path Planning Using Particle. Swarm Optimization in Dynamic Environments. with Mobile Obstacles and Target
 Advanced Studies in Biology, Vol. 3, 2011, no. 1, 43-53 Improvement of Robot Path Planning Using Particle Swarm Optimization in Dynamic Environments with Mobile Obstacles and Target Maryam Yarmohamadi
Advanced Studies in Biology, Vol. 3, 2011, no. 1, 43-53 Improvement of Robot Path Planning Using Particle Swarm Optimization in Dynamic Environments with Mobile Obstacles and Target Maryam Yarmohamadi
UMBC 671 Midterm Exam 19 October 2009
 Name: 0 1 2 3 4 5 6 total 0 20 25 30 30 25 20 150 UMBC 671 Midterm Exam 19 October 2009 Write all of your answers on this exam, which is closed book and consists of six problems, summing to 160 points.
Name: 0 1 2 3 4 5 6 total 0 20 25 30 30 25 20 150 UMBC 671 Midterm Exam 19 October 2009 Write all of your answers on this exam, which is closed book and consists of six problems, summing to 160 points.
Robot Crowd Navigation using Predictive Position Fields in the Potential Function Framework
 Robot Crowd Navigation using Predictive Position Fields in the Potential Function Framework Ninad Pradhan, Timothy Burg, and Stan Birchfield Abstract A potential function based path planner for a mobile
Robot Crowd Navigation using Predictive Position Fields in the Potential Function Framework Ninad Pradhan, Timothy Burg, and Stan Birchfield Abstract A potential function based path planner for a mobile
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS. Nuno Sousa Eugénio Oliveira
 AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
On-demand printable robots
 On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
Conflict Management in Multiagent Robotic System: FSM and Fuzzy Logic Approach
 Conflict Management in Multiagent Robotic System: FSM and Fuzzy Logic Approach Witold Jacak* and Stephan Dreiseitl" and Karin Proell* and Jerzy Rozenblit** * Dept. of Software Engineering, Polytechnic
Conflict Management in Multiagent Robotic System: FSM and Fuzzy Logic Approach Witold Jacak* and Stephan Dreiseitl" and Karin Proell* and Jerzy Rozenblit** * Dept. of Software Engineering, Polytechnic
Simple Search Algorithms
 Lecture 3 of Artificial Intelligence Simple Search Algorithms AI Lec03/1 Topics of this lecture Random search Search with closed list Search with open list Depth-first and breadth-first search again Uniform-cost
Lecture 3 of Artificial Intelligence Simple Search Algorithms AI Lec03/1 Topics of this lecture Random search Search with closed list Search with open list Depth-first and breadth-first search again Uniform-cost
UNIT VI. Current approaches to programming are classified as into two major categories:
 Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
COGNITIVE MODEL OF MOBILE ROBOT WORKSPACE
 COGNITIVE MODEL OF MOBILE ROBOT WORKSPACE Prof.dr.sc. Mladen Crneković, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb Prof.dr.sc. Davor Zorc, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb
COGNITIVE MODEL OF MOBILE ROBOT WORKSPACE Prof.dr.sc. Mladen Crneković, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb Prof.dr.sc. Davor Zorc, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb
TECHNOLOGY DEVELOPMENT AREAS IN AAWA
 TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION
 Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
Overview of Challenges in the Development of Autonomous Mobile Robots. August 23, 2011
 Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Some Signal Processing Techniques for Wireless Cooperative Localization and Tracking
 Some Signal Processing Techniques for Wireless Cooperative Localization and Tracking Hadi Noureddine CominLabs UEB/Supélec Rennes SCEE Supélec seminar February 20, 2014 Acknowledgments This work was performed
Some Signal Processing Techniques for Wireless Cooperative Localization and Tracking Hadi Noureddine CominLabs UEB/Supélec Rennes SCEE Supélec seminar February 20, 2014 Acknowledgments This work was performed
Foundations of AI. 3. Solving Problems by Searching. Problem-Solving Agents, Formulating Problems, Search Strategies
 Foundations of AI 3. Solving Problems by Searching Problem-Solving Agents, Formulating Problems, Search Strategies Wolfram Burgard, Andreas Karwath, Bernhard Nebel, and Martin Riedmiller SA-1 Contents
Foundations of AI 3. Solving Problems by Searching Problem-Solving Agents, Formulating Problems, Search Strategies Wolfram Burgard, Andreas Karwath, Bernhard Nebel, and Martin Riedmiller SA-1 Contents
Cooperative robot team navigation strategies based on an environmental model
 Cooperative robot team navigation strategies based on an environmental model P. Urcola and L. Montano Instituto de Investigación en Ingeniería de Aragón, University of Zaragoza (Spain) Email: {urcola,
Cooperative robot team navigation strategies based on an environmental model P. Urcola and L. Montano Instituto de Investigación en Ingeniería de Aragón, University of Zaragoza (Spain) Email: {urcola,
Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments
 Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments IMI Lab, Dept. of Computer Science University of North Carolina Charlotte Outline Problem and Context Basic RAMP Framework
Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments IMI Lab, Dept. of Computer Science University of North Carolina Charlotte Outline Problem and Context Basic RAMP Framework
Stress and Strain Analysis in Critical Joints of the Bearing Parts of the Mobile Platform Using Tensometry
 American Journal of Mechanical Engineering, 2016, Vol. 4, No. 7, 394-399 Available online at http://pubs.sciepub.com/ajme/4/7/30 Science and Education Publishing DOI:10.12691/ajme-4-7-30 Stress and Strain
American Journal of Mechanical Engineering, 2016, Vol. 4, No. 7, 394-399 Available online at http://pubs.sciepub.com/ajme/4/7/30 Science and Education Publishing DOI:10.12691/ajme-4-7-30 Stress and Strain
Path Planning in Dynamic Environments Using Time Warps. S. Farzan and G. N. DeSouza
 Path Planning in Dynamic Environments Using Time Warps S. Farzan and G. N. DeSouza Outline Introduction Harmonic Potential Fields Rubber Band Model Time Warps Kalman Filtering Experimental Results 2 Introduction
Path Planning in Dynamic Environments Using Time Warps S. Farzan and G. N. DeSouza Outline Introduction Harmonic Potential Fields Rubber Band Model Time Warps Kalman Filtering Experimental Results 2 Introduction
Robot Autonomy Project Final Report Multi-Robot Motion Planning In Tight Spaces
 16-662 Robot Autonomy Project Final Report Multi-Robot Motion Planning In Tight Spaces Aum Jadhav The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 ajadhav@andrew.cmu.edu Kazu Otani
16-662 Robot Autonomy Project Final Report Multi-Robot Motion Planning In Tight Spaces Aum Jadhav The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 ajadhav@andrew.cmu.edu Kazu Otani
Outline for today s lecture Informed Search Optimal informed search: A* (AIMA 3.5.2) Creating good heuristic functions Hill Climbing
 Creating good heuristic functions Hill Climbing") Informed Search II Outline for today s lecture Informed Search Optimal informed search: A* (AIMA 3.5.2) Creating good heuristic functions Hill Climbing CIS 521 - Intro to AI - Fall 2017 2 Review: Greedy
Informed Search II Outline for today s lecture Informed Search Optimal informed search: A* (AIMA 3.5.2) Creating good heuristic functions Hill Climbing CIS 521 - Intro to AI - Fall 2017 2 Review: Greedy
Learning a Visual Task by Genetic Programming
 Learning a Visual Task by Genetic Programming Prabhas Chongstitvatana and Jumpol Polvichai Department of computer engineering Chulalongkorn University Bangkok 10330, Thailand fengpjs@chulkn.car.chula.ac.th
Learning a Visual Task by Genetic Programming Prabhas Chongstitvatana and Jumpol Polvichai Department of computer engineering Chulalongkorn University Bangkok 10330, Thailand fengpjs@chulkn.car.chula.ac.th
Intelligent Agents & Search Problem Formulation. AIMA, Chapters 2,
 Intelligent Agents & Search Problem Formulation AIMA, Chapters 2, 3.1-3.2 Outline for today s lecture Intelligent Agents (AIMA 2.1-2) Task Environments Formulating Search Problems CIS 421/521 - Intro to
Intelligent Agents & Search Problem Formulation AIMA, Chapters 2, 3.1-3.2 Outline for today s lecture Intelligent Agents (AIMA 2.1-2) Task Environments Formulating Search Problems CIS 421/521 - Intro to
Artificial Intelligence Lecture 3
 Artificial Intelligence Lecture 3 The problem Depth first Not optimal Uses O(n) space Optimal Uses O(B n ) space Can we combine the advantages of both approaches? 2 Iterative deepening (IDA) Let M be a
Artificial Intelligence Lecture 3 The problem Depth first Not optimal Uses O(n) space Optimal Uses O(B n ) space Can we combine the advantages of both approaches? 2 Iterative deepening (IDA) Let M be a
PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES
 Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Semi-Autonomous Parking for Enhanced Safety and Efficiency
 Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
The Behavior Evolving Model and Application of Virtual Robots
 The Behavior Evolving Model and Application of Virtual Robots Suchul Hwang Kyungdal Cho V. Scott Gordon Inha Tech. College Inha Tech College CSUS, Sacramento 253 Yonghyundong Namku 253 Yonghyundong Namku
The Behavior Evolving Model and Application of Virtual Robots Suchul Hwang Kyungdal Cho V. Scott Gordon Inha Tech. College Inha Tech College CSUS, Sacramento 253 Yonghyundong Namku 253 Yonghyundong Namku
A Reactive Collision Avoidance Approach for Mobile Robot in Dynamic Environments
 A Reactive Collision Avoidance Approach for Mobile Robot in Dynamic Environments Tang S. H. and C. K. Ang Universiti Putra Malaysia (UPM), Malaysia Email: saihong@eng.upm.edu.my, ack_kit@hotmail.com D.
A Reactive Collision Avoidance Approach for Mobile Robot in Dynamic Environments Tang S. H. and C. K. Ang Universiti Putra Malaysia (UPM), Malaysia Email: saihong@eng.upm.edu.my, ack_kit@hotmail.com D.
Online Replanning for Reactive Robot Motion: Practical Aspects
 Online Replanning for Reactive Robot Motion: Practical Aspects Eiichi Yoshida, Kazuhito Yokoi and Pierre Gergondet. Abstract We address practical issues to develop reactive motion planning method capable
Online Replanning for Reactive Robot Motion: Practical Aspects Eiichi Yoshida, Kazuhito Yokoi and Pierre Gergondet. Abstract We address practical issues to develop reactive motion planning method capable
Better understanding motion planning: A compared review of Principles of Robot Motion: Theory, Algorithms, and Implementations, by H. Choset et al.
 Better understanding motion planning: A compared review of Principles of Robot Motion: Theory, Algorithms, and Implementations, by H. Choset et al. Pablo Jiménez Institut de Robòtica i Informàtica Industrial
Better understanding motion planning: A compared review of Principles of Robot Motion: Theory, Algorithms, and Implementations, by H. Choset et al. Pablo Jiménez Institut de Robòtica i Informàtica Industrial
CSE 573 Problem Set 1. Answers on 10/17/08
 CSE 573 Problem Set. Answers on 0/7/08 Please work on this problem set individually. (Subsequent problem sets may allow group discussion. If any problem doesn t contain enough information for you to answer
CSE 573 Problem Set. Answers on 0/7/08 Please work on this problem set individually. (Subsequent problem sets may allow group discussion. If any problem doesn t contain enough information for you to answer
The Future of AI A Robotics Perspective
 The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
Path Planning And Trajectory Control Of Collaborative Mobile Robots Using Hybrid Control Architecture
 Path Planning And Trajectory Control Of Collaborative Mobile Robots Using Hybrid Control Architecture Trevor Davies, Amor Jnifene Department of Mechanical Engineering, Royal Military College of Canada
Path Planning And Trajectory Control Of Collaborative Mobile Robots Using Hybrid Control Architecture Trevor Davies, Amor Jnifene Department of Mechanical Engineering, Royal Military College of Canada
Dance Movement Patterns Recognition (Part II)
") Dance Movement Patterns Recognition (Part II) Jesús Sánchez Morales Contents Goals HMM Recognizing Simple Steps Recognizing Complex Patterns Auto Generation of Complex Patterns Graphs Test Bench Conclusions
Dance Movement Patterns Recognition (Part II) Jesús Sánchez Morales Contents Goals HMM Recognizing Simple Steps Recognizing Complex Patterns Auto Generation of Complex Patterns Graphs Test Bench Conclusions
Rearrangement task realization by multiple mobile robots with efficient calculation of task constraints
 2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 WeA1.2 Rearrangement task realization by multiple mobile robots with efficient calculation of task constraints
2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 WeA1.2 Rearrangement task realization by multiple mobile robots with efficient calculation of task constraints
Solving Problems by Searching
 Solving Problems by Searching Berlin Chen 2005 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 3 AI - Berlin Chen 1 Introduction Problem-Solving Agents vs. Reflex
Solving Problems by Searching Berlin Chen 2005 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 3 AI - Berlin Chen 1 Introduction Problem-Solving Agents vs. Reflex
On the Probabilistic Foundations of Probabilistic Roadmaps (Extended Abstract)
") On the Probabilistic Foundations of Probabilistic Roadmaps (Extended Abstract) David Hsu 1, Jean-Claude Latombe 2, and Hanna Kurniawati 1 1 Department of Computer Science, National University of Singapore
On the Probabilistic Foundations of Probabilistic Roadmaps (Extended Abstract) David Hsu 1, Jean-Claude Latombe 2, and Hanna Kurniawati 1 1 Department of Computer Science, National University of Singapore
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping
 Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
A second-order fast marching eikonal solver a
 A second-order fast marching eikonal solver a a Published in SEP Report, 100, 287-292 (1999) James Rickett and Sergey Fomel 1 INTRODUCTION The fast marching method (Sethian, 1996) is widely used for solving
A second-order fast marching eikonal solver a a Published in SEP Report, 100, 287-292 (1999) James Rickett and Sergey Fomel 1 INTRODUCTION The fast marching method (Sethian, 1996) is widely used for solving
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
NAVIGATION OF MOBILE ROBOTS
 MOBILE ROBOTICS course NAVIGATION OF MOBILE ROBOTS Maria Isabel Ribeiro Pedro Lima mir@isr.ist.utl.pt pal@isr.ist.utl.pt Instituto Superior Técnico (IST) Instituto de Sistemas e Robótica (ISR) Av.Rovisco
MOBILE ROBOTICS course NAVIGATION OF MOBILE ROBOTS Maria Isabel Ribeiro Pedro Lima mir@isr.ist.utl.pt pal@isr.ist.utl.pt Instituto Superior Técnico (IST) Instituto de Sistemas e Robótica (ISR) Av.Rovisco
Term Paper: Robot Arm Modeling
 Term Paper: Robot Arm Modeling Akul Penugonda December 10, 2014 1 Abstract This project attempts to model and verify the motion of a robot arm. The two joints used in robot arms - prismatic and rotational.
Term Paper: Robot Arm Modeling Akul Penugonda December 10, 2014 1 Abstract This project attempts to model and verify the motion of a robot arm. The two joints used in robot arms - prismatic and rotational.
Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path
 Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path Taichi Yamada 1, Yeow Li Sa 1 and Akihisa Ohya 1 1 Graduate School of Systems and Information Engineering, University of Tsukuba, 1-1-1,
Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path Taichi Yamada 1, Yeow Li Sa 1 and Akihisa Ohya 1 1 Graduate School of Systems and Information Engineering, University of Tsukuba, 1-1-1,
Novel Mobile Robot Path planning Algorithm
 Novel Mobile Robot Path planning Algorithm Hachour Ouarda Abstract In this present work we propose a novel mobile robot path planning algorithm. Autonomous robots which work without human operators are
Novel Mobile Robot Path planning Algorithm Hachour Ouarda Abstract In this present work we propose a novel mobile robot path planning algorithm. Autonomous robots which work without human operators are
Moving Path Planning Forward
 Moving Path Planning Forward Nathan R. Sturtevant Department of Computer Science University of Denver Denver, CO, USA sturtevant@cs.du.edu Abstract. Path planning technologies have rapidly improved over
Moving Path Planning Forward Nathan R. Sturtevant Department of Computer Science University of Denver Denver, CO, USA sturtevant@cs.du.edu Abstract. Path planning technologies have rapidly improved over
Localization (Position Estimation) Problem in WSN
 Problem in WSN") Localization (Position Estimation) Problem in WSN [1] Convex Position Estimation in Wireless Sensor Networks by L. Doherty, K.S.J. Pister, and L.E. Ghaoui [2] Semidefinite Programming for Ad Hoc Wireless
Localization (Position Estimation) Problem in WSN [1] Convex Position Estimation in Wireless Sensor Networks by L. Doherty, K.S.J. Pister, and L.E. Ghaoui [2] Semidefinite Programming for Ad Hoc Wireless
Surveillance strategies for autonomous mobile robots. Nicola Basilico Department of Computer Science University of Milan
 Surveillance strategies for autonomous mobile robots Nicola Basilico Department of Computer Science University of Milan Intelligence, surveillance, and reconnaissance (ISR) with autonomous UAVs ISR defines
Surveillance strategies for autonomous mobile robots Nicola Basilico Department of Computer Science University of Milan Intelligence, surveillance, and reconnaissance (ISR) with autonomous UAVs ISR defines
International Journal of Swarm Intelligence and Evolutionary Computation
 ISSN: 2090-4908 International Journal of Swarm Intelligence and Evolutionary Computation Research Article International Journal of Swarm Intelligence and Evolutionary Computation Norseev et al., 2014,
ISSN: 2090-4908 International Journal of Swarm Intelligence and Evolutionary Computation Research Article International Journal of Swarm Intelligence and Evolutionary Computation Norseev et al., 2014,
Autonomous Robotics. CS Fall Amarda Shehu. Department of Computer Science George Mason University
 Autonomous Robotics CS 485 - Fall 2016 Amarda Shehu Department of Computer Science George Mason University 1 Outline of Today s Class 2 Robotics over the Years 3 Trends in Robotics Research 4 Course Organization
Autonomous Robotics CS 485 - Fall 2016 Amarda Shehu Department of Computer Science George Mason University 1 Outline of Today s Class 2 Robotics over the Years 3 Trends in Robotics Research 4 Course Organization
Kinodynamic Motion Planning Amidst Moving Obstacles
 TO APPEAR IN IEEE International Conference on Robotics and Automation, 2000 Kinodynamic Motion Planning Amidst Moving Obstacles Robert Kindel David Hsu y Jean-Claude Latombe y Stephen Rock y Department
TO APPEAR IN IEEE International Conference on Robotics and Automation, 2000 Kinodynamic Motion Planning Amidst Moving Obstacles Robert Kindel David Hsu y Jean-Claude Latombe y Stephen Rock y Department
Programmable self-assembly in a thousandrobot
 Programmable self-assembly in a thousandrobot swarm Michael Rubenstein, Alejandro Cornejo, Radhika Nagpal. By- Swapna Joshi 1 st year Ph.D Computing Culture and Society. Authors Michael Rubenstein Assistant
Programmable self-assembly in a thousandrobot swarm Michael Rubenstein, Alejandro Cornejo, Radhika Nagpal. By- Swapna Joshi 1 st year Ph.D Computing Culture and Society. Authors Michael Rubenstein Assistant
Robot Team Formation Control using Communication "Throughput Approach"
 University of Denver Digital Commons @ DU Electronic Theses and Dissertations Graduate Studies 1-1-2013 Robot Team Formation Control using Communication "Throughput Approach" FatmaZahra Ahmed BenHalim
University of Denver Digital Commons @ DU Electronic Theses and Dissertations Graduate Studies 1-1-2013 Robot Team Formation Control using Communication "Throughput Approach" FatmaZahra Ahmed BenHalim
Informed Search. Read AIMA Some materials will not be covered in lecture, but will be on the midterm.
 Informed Search Read AIMA 3.1-3.6. Some materials will not be covered in lecture, but will be on the midterm. Reminder HW due tonight HW1 is due tonight before 11:59pm. Please submit early. 1 second late
Informed Search Read AIMA 3.1-3.6. Some materials will not be covered in lecture, but will be on the midterm. Reminder HW due tonight HW1 is due tonight before 11:59pm. Please submit early. 1 second late
Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization
 Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Recommended Text. Logistics. Course Logistics. Intelligent Robotic Systems
 Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Target Seeking Behaviour of an Intelligent Mobile Robot Using Advanced Particle Swarm Optimization
 Target Seeking Behaviour of an Intelligent Mobile Robot Using Advanced Particle Swarm Optimization B.B.V.L. Deepak, Dayal R. Parhi Abstract the present research work aims to develop two different motion
Target Seeking Behaviour of an Intelligent Mobile Robot Using Advanced Particle Swarm Optimization B.B.V.L. Deepak, Dayal R. Parhi Abstract the present research work aims to develop two different motion
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Informed search algorithms. Chapter 3 (Based on Slides by Stuart Russell, Richard Korf, Subbarao Kambhampati, and UW-AI faculty)
") Informed search algorithms Chapter 3 (Based on Slides by Stuart Russell, Richard Korf, Subbarao Kambhampati, and UW-AI faculty) Intuition, like the rays of the sun, acts only in an inflexibly straight
Informed search algorithms Chapter 3 (Based on Slides by Stuart Russell, Richard Korf, Subbarao Kambhampati, and UW-AI faculty) Intuition, like the rays of the sun, acts only in an inflexibly straight
Microsoft Scrolling Strip Prototype: Technical Description
 Microsoft Scrolling Strip Prototype: Technical Description Primary features implemented in prototype Ken Hinckley 7/24/00 We have done at least some preliminary usability testing on all of the features
Microsoft Scrolling Strip Prototype: Technical Description Primary features implemented in prototype Ken Hinckley 7/24/00 We have done at least some preliminary usability testing on all of the features
Game Artificial Intelligence ( CS 4731/7632 )
") Game Artificial Intelligence ( CS 4731/7632 ) Instructor: Stephen Lee-Urban http://www.cc.gatech.edu/~surban6/2018-gameai/ (soon) Piazza T-square What s this all about? Industry standard approaches to
Game Artificial Intelligence ( CS 4731/7632 ) Instructor: Stephen Lee-Urban http://www.cc.gatech.edu/~surban6/2018-gameai/ (soon) Piazza T-square What s this all about? Industry standard approaches to
isudoku Computing Solutions to Sudoku Puzzles w/ 3 Algorithms by: Gavin Hillebrand Jamie Sparrow Jonathon Makepeace Matthew Harris
 isudoku Computing Solutions to Sudoku Puzzles w/ 3 Algorithms by: Gavin Hillebrand Jamie Sparrow Jonathon Makepeace Matthew Harris What is Sudoku? A logic-based puzzle game Heavily based in combinatorics
isudoku Computing Solutions to Sudoku Puzzles w/ 3 Algorithms by: Gavin Hillebrand Jamie Sparrow Jonathon Makepeace Matthew Harris What is Sudoku? A logic-based puzzle game Heavily based in combinatorics
May Edited by: Roemi E. Fernández Héctor Montes
 May 2016 Edited by: Roemi E. Fernández Héctor Montes RoboCity16 Open Conference on Future Trends in Robotics Editors Roemi E. Fernández Saavedra Héctor Montes Franceschi Madrid, 26 May 2016 Edited by:
May 2016 Edited by: Roemi E. Fernández Héctor Montes RoboCity16 Open Conference on Future Trends in Robotics Editors Roemi E. Fernández Saavedra Héctor Montes Franceschi Madrid, 26 May 2016 Edited by:
Problem A. Worst Locations
 Problem A Worst Locations Two pandas A and B like each other. They have been placed in a bamboo jungle (which can be seen as a perfect binary tree graph of 2 N -1 vertices and 2 N -2 edges whose leaves
Problem A Worst Locations Two pandas A and B like each other. They have been placed in a bamboo jungle (which can be seen as a perfect binary tree graph of 2 N -1 vertices and 2 N -2 edges whose leaves
Introduction of Research Activity in Mechanical Systems Design Laboratory (Takeda s Lab) in Tokyo Tech
 in Tokyo Tech") Introduction of Research Activity in Mechanical Systems Design Laboratory (Takeda s Lab) in Tokyo Tech Kinematic design of asymmetrical position-orientation decoupled parallel mechanism with 5 dof Pipe
Introduction of Research Activity in Mechanical Systems Design Laboratory (Takeda s Lab) in Tokyo Tech Kinematic design of asymmetrical position-orientation decoupled parallel mechanism with 5 dof Pipe
An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots
 An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany maren,burgard
An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany maren,burgard
INTRODUCTION TO GAME AI
 CS 387: GAME AI INTRODUCTION TO GAME AI 3/31/2016 Instructor: Santiago Ontañón santi@cs.drexel.edu Class website: https://www.cs.drexel.edu/~santi/teaching/2016/cs387/intro.html Outline Game Engines Perception
CS 387: GAME AI INTRODUCTION TO GAME AI 3/31/2016 Instructor: Santiago Ontañón santi@cs.drexel.edu Class website: https://www.cs.drexel.edu/~santi/teaching/2016/cs387/intro.html Outline Game Engines Perception
Simulation of a mobile robot navigation system
 Edith Cowan University Research Online ECU Publications 2011 2011 Simulation of a mobile robot navigation system Ahmed Khusheef Edith Cowan University Ganesh Kothapalli Edith Cowan University Majid Tolouei
Edith Cowan University Research Online ECU Publications 2011 2011 Simulation of a mobile robot navigation system Ahmed Khusheef Edith Cowan University Ganesh Kothapalli Edith Cowan University Majid Tolouei
Unit 12: Artificial Intelligence CS 101, Fall 2018
 Unit 12: Artificial Intelligence CS 101, Fall 2018 Learning Objectives After completing this unit, you should be able to: Explain the difference between procedural and declarative knowledge. Describe the
Unit 12: Artificial Intelligence CS 101, Fall 2018 Learning Objectives After completing this unit, you should be able to: Explain the difference between procedural and declarative knowledge. Describe the
An Intuitional Method for Mobile Robot Path-planning in a Dynamic Environment
 An Intuitional Method for Mobile Robot Path-planning in a Dynamic Environment Ching-Chang Wong, Hung-Ren Lai, and Hui-Chieh Hou Department of Electrical Engineering, Tamkang University Tamshui, Taipei
An Intuitional Method for Mobile Robot Path-planning in a Dynamic Environment Ching-Chang Wong, Hung-Ren Lai, and Hui-Chieh Hou Department of Electrical Engineering, Tamkang University Tamshui, Taipei
NEW YORK STATE TEACHER CERTIFICATION EXAMINATIONS
 NEW YORK STATE TEACHER CERTIFICATION EXAMINATIONS TEST DESIGN AND FRAMEWORK June 2018 Authorized for Distribution by the New York State Education Department This test design and framework document is designed
NEW YORK STATE TEACHER CERTIFICATION EXAMINATIONS TEST DESIGN AND FRAMEWORK June 2018 Authorized for Distribution by the New York State Education Department This test design and framework document is designed
Unit 1: Introduction to Autonomous Robotics
 Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Reinforcement Learning Simulations and Robotics
 Reinforcement Learning Simulations and Robotics Models Partially observable noise in sensors Policy search methods rather than value functionbased approaches Isolate key parameters by choosing an appropriate
Reinforcement Learning Simulations and Robotics Models Partially observable noise in sensors Policy search methods rather than value functionbased approaches Isolate key parameters by choosing an appropriate
Learning Behaviors for Environment Modeling by Genetic Algorithm
 Learning Behaviors for Environment Modeling by Genetic Algorithm Seiji Yamada Department of Computational Intelligence and Systems Science Interdisciplinary Graduate School of Science and Engineering Tokyo
Learning Behaviors for Environment Modeling by Genetic Algorithm Seiji Yamada Department of Computational Intelligence and Systems Science Interdisciplinary Graduate School of Science and Engineering Tokyo
Decision Science Letters
 Decision Science Letters 3 (2014) 121 130 Contents lists available at GrowingScience Decision Science Letters homepage: www.growingscience.com/dsl A new effective algorithm for on-line robot motion planning
Decision Science Letters 3 (2014) 121 130 Contents lists available at GrowingScience Decision Science Letters homepage: www.growingscience.com/dsl A new effective algorithm for on-line robot motion planning
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Sensing and Perception
 Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Autonomous Mobile Robots
 Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
CS123 - Recap2 & Final Project
 CS123 - Recap2 & Final Project Programming Your Personal Robot Kyong-Sok KC Chang, David Zhu Fall 2015-16 Calendar Part 2 Part 1 Part 4 Part 3 Part 5 Part 5 KC Teaching David Teaching Kyong-Sok (KC) Chang
CS123 - Recap2 & Final Project Programming Your Personal Robot Kyong-Sok KC Chang, David Zhu Fall 2015-16 Calendar Part 2 Part 1 Part 4 Part 3 Part 5 Part 5 KC Teaching David Teaching Kyong-Sok (KC) Chang
On the Combination of Constraint Programming and Stochastic Search: The Sudoku Case
 On the Combination of Constraint Programming and Stochastic Search: The Sudoku Case Rhydian Lewis Cardiff Business School Pryfysgol Caerdydd/ Cardiff University lewisr@cf.ac.uk Talk Plan Introduction:
On the Combination of Constraint Programming and Stochastic Search: The Sudoku Case Rhydian Lewis Cardiff Business School Pryfysgol Caerdydd/ Cardiff University lewisr@cf.ac.uk Talk Plan Introduction:
Haptics CS327A
 Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Morse Code Autonomous Challenge. Overview. Challenge. Activity. Difficulty. Materials Needed. Class Time. Grade Level. Learning Focus.
 Overview Challenge Students will design, program, and build a robot that communicates with Morse code. The robot must use its communication system to tell the operator when the robot completes each task
Overview Challenge Students will design, program, and build a robot that communicates with Morse code. The robot must use its communication system to tell the operator when the robot completes each task
Finding and Optimizing Solvable Priority Schemes for Decoupled Path Planning Techniques for Teams of Mobile Robots
 Finding and Optimizing Solvable Priority Schemes for Decoupled Path Planning Techniques for Teams of Mobile Robots Maren Bennewitz Wolfram Burgard Sebastian Thrun Department of Computer Science, University
Finding and Optimizing Solvable Priority Schemes for Decoupled Path Planning Techniques for Teams of Mobile Robots Maren Bennewitz Wolfram Burgard Sebastian Thrun Department of Computer Science, University