E190Q Lecture 15 Autonomous Robot Navigation
|
|
|
- Lee Waters
- 5 years ago
- Views:
Transcription
1 E190Q Lecture 15 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring Figures courtesy of Probabilistic Robotics (Thrun et. Al.)

2 Control Structures Planning Based Control Prior Knowledge Operator Commands Localization Cognition Perception Motion Control 2
3 MP: Outline 1. Multi-Query PRMs 2. Graph Search 3. Artificial Potential Fields 3
4 MP: Outline 1. Multi-Query PRMs 2. Graph Search 3. Artificial Potential Fields 4
5 Multi-Query PRMs Multi-Query Strategy 1. Learning Phase: Generate the PRM with two steps: Construction Expansion 2. Query Phase: Connect start and goal configurations to PRM Perform a graph search to find path 5

6 Multi-Query PRMs milestone local path free space mg mb 6 [Kavraki, Svetska, Latombe,Overmars, 95]
7 Multi-Query PRMs Nomenclature R=( N, E ) N E c e RoadMap Set of Nodes Set of edges Configuration edge 7
8 Multi-Query PRMs Learning Phase Construction Step Algorithm 8 Start with empty R=( N, E ) while (not done) { } Generate a random free config c and add to N Choose a subset N c of candidate neighbors around c from N Try to connect c to each node in N c with local planner in the order of increasing distance from c Add the edge found to E
9 Multi-Query PRMs Learning Phase Construction Step Efficiency-driven Robots with many dofs (high-dim C-spaces) Collision! Static environments 9 Courtesy of C. Allocco
10 Multi-Query PRMs Learning Phase Local Planner Used to connect two nodes. Must contain collision-check. For good performance, the LP must be: 1. Deterministic - Eliminates the need for storing local plans. 2. Fast - To ensure quick planning queries. 10
11 Multi-Query PRMs Learning Phase Expansion Step 1. Find the nodes in difficult regions using heuristic weight function w(c) 2. Expand c using random-bounce walks 3. Repeat as necessary 11
12 Multi-Query PRMs Learning Phase Expansion Step Several options to define weight function w(c) Inversely proportional to the number of nodes within some predefined distance from c Inversely proportional to the distance from c to the nearest connected component not containing c Proportional to the failure ratio of the local planner 12
13 Multi-Query PRMs Learning Phase Expansion Step 1. Loop 1. Pick a random direction of motion in C-space 2. Move in the direction until an obstacle is hit 3. Check for connection with another node 4. Repeat until the path can be connected to another node 13
14 Multi-Query PRMs Learning Phase Expansion Step Efficiency-driven Robots with many dofs (high-dim C-spaces) Static environments Courtesy of C. Allocco
15 Multi-Query PRMs Learning Phase Expansion Step Loop 1. Pick a random direction of motion in C-space 2. Move in the direction until an obstacle is hit 3. Check for connection with another node 4. Repeat until the path can be connected to another node 2. Store the final config n and the edge (c, n) in R 3. Store the computed path (non-deterministic) 4. Record that n belongs to the same connected component as c
16 Multi-Query PRMs Query Phase Query Phase Algorithm 1. Given the start and goal configurations s and g, calculate feasible paths P s and P g to the nodes ~ s and g ~ on the roadmap (w/ LP) 2. Calculate the path P from s to g using the roadmap and a tree search planner 16
17 Multi-Query PRMs Query Phase Efficiency-driven s ~ s Robots with many dofs (high-dim C-spaces) Static environments 17 ~ g g Courtesy of C. Allocco
18 Probabilistic Road Maps Two Tenets: 1. Checking sampled configurations and connections between samples for collision can be done efficiently. 2. A relatively small number of milestones and local paths are sufficient to capture the connectivity of the free space. 18

19 Probabilistic Road Maps: Discrete and Continous Planning 19 Courtesy of T. Bretl
20 MP: Outline 1. Multi-Query PRMs 2. Graph Search 3. Artificial Potential Fields 20
21 Graph Search Cell decomposition Decompose the free space into simple cells and represent the connectivity of the free space by the adjacency graph of these cells 21
22 Graph Search Given a discretization of C, a search can be carried out using a Graph Search or gradient descent, etc. Example: Find a path from D to G C D A B D E G B E F A C F G 22
23 Tree Search Tree nomenclature: Parent Node Child Node Algorithms differ in the order in which they search the branches (edges) of the tree 23
24 Data Structures The Fringe or Frontier is the collection of nodes waiting to be expanded. 24 Fringe
25 Tree Search Search Algorithms 1. Breadth First Search 2. Depth First Search 3. A* 25
26 Breadth-First All the nodes at depth d in the search tree are expanded before nodes at depth d+1 26
27 Breadth-First Snapshot Initial Visited Fringe Current Visible Goal 27 Fringe: [] + [2,3]
28 Breadth-First Snapshot Initial Visited Fringe Current Visible Goal Fringe: [3] + [4,5]
29 Breadth-First Snapshot Initial Visited Fringe Current Visible Goal Fringe: [4,5] + [6,7]
30 Breadth-First Snapshot Initial Visited Fringe Current Visible Goal Fringe: [5,6,7] + [8,9]
31 Breadth-First Snapshot Initial Visited Fringe Current Visible Goal Fringe: [6,7,8,9] + [10,11]
32 Breadth-First Snapshot Initial Visited Fringe Current Visible Goal Fringe: [7,8,9,10,11] + [12,13]
33 Breadth-First Snapshot Initial Visited Fringe Current Visible Goal Fringe: [8,9.10,11,12,13] + [14,15]
34 Breadth-First Snapshot Initial Visited Fringe Current Visible Goal Fringe: [9,10,11,12,13,14,15] + [16,17]
35 Breadth-First Snapshot Initial Visited Fringe Current Visible Goal Fringe: [10,11,12,13,14,15,16,17] + [18,19]
36 Breadth-First Snapshot Initial Visited Fringe Current Visible Goal Fringe: [11,12,13,14,15,16,17,18,19] + [20,21]
37 Breadth-First Snapshot Initial Visited Fringe Current Visible Goal Fringe: [12, 13, 14, 15, 16, 17, 18, 19, 20, 21] + [22,23]
38 Breadth-First Snapshot Initial Visited Fringe Current Visible Goal Note: The goal node is visible here, but we can not perform the goal test yet Fringe: [13,14,15,16,17,18,19,20,21] + [22,23]
39 Breadth-First Snapshot Initial Visited Fringe Current Visible Goal Fringe: [14,15,16,17,18,19,20,21,22,23,24,25] + [26,27]
40 Breadth-First Snapshot Initial Visited Fringe Current Visible Goal Fringe: [15,16,17,18,19,20,21,22,23,24,25,26,27] + [28,29]
41 Breadth-First Snapshot Initial Visited Fringe Current Visible Goal Fringe: [15,16,17,18,19,20,21,22,23,24,25,26,27,28,29] + [30,31]
42 Breadth-First Snapshot Initial Visited Fringe Current Visible Goal Fringe: [17,18,19,20,21,22,23,24,25,26,27,28,29,30,31]
43 Breadth-First Snapshot Initial Visited Fringe Current Visible Goal Fringe: [18,19,20,21,22,23,24,25,26,27,28,29,30,31]
44 Breadth-First Snapshot Initial Visited Fringe Current Visible Goal Fringe: [19,20,21,22,23,24,25,26,27,28,29,30,31]
45 Breadth-First Snapshot Initial Visited Fringe Current Visible Goal Fringe: [20,21,22,23,24,25,26,27,28,29,30,31]
46 Breadth-First Snapshot Initial Visited Fringe Current Visible Goal Fringe: [21,22,23,24,25,26,27,28,29,30,31]
47 Breadth-First Snapshot Initial Visited Fringe Current Visible Goal Fringe: [22,23,24,25,26,27,28,29,30,31]
48 Breadth-First Snapshot Initial Visited Fringe Current Visible Goal Fringe: [23,24,25,26,27,28,29,30,31]
49 Breadth-First Snapshot Initial Visited Fringe Current Visible Goal Fringe: [24,25,26,27,28,29,30,31]
50 Breadth-First Snapshot Initial Visited Fringe Current Visible Goal Note: The goal test is positive for this node, and a solution is found in 24 steps Fringe: [25,26,27,28,29,30,31]
51 Breadth First Search Complete Optimal if cost is increasing with path depth. Computational complexity O(b d ), where b is the branching factor and d is the depth Space (memory) complexity O(b d ) 51
52 Tree Search Search Algorithms 1. Breadth First Search 2. Depth First Search 3. A* 52
53 Depth-First Expands one of the nodes at the deepest level of the tree 53
54 Depth-First Snapshot Initial Visited Fringe Current Visible Goal 54
55 Depth-First Snapshot Initial Visited Fringe Current Visible Goal
56 Depth-First Snapshot Initial Visited Fringe Current Visible Goal
57 Depth-First Snapshot Initial Visited Fringe Current Visible Goal
58 Depth-First Snapshot Initial Visited Fringe Current Visible Goal
59 Depth-First Snapshot Initial Visited Fringe Current Visible Goal
60 Depth-First Snapshot Initial Visited Fringe Current Visible Goal
61 Depth-First Snapshot Initial Visited Fringe Current Visible Goal
62 Depth-First Snapshot Initial Visited Fringe Current Visible Goal
63 Depth First Search Complete if finite depth NOT Optimal if we take first goal found Computational complexity O(b m ), where b is the branching factor and m is the depth Space (memory) complexity O(bm) 63
64 Graph Search: Outline Search Algorithms 1. Breadth First Search 2. Depth First Search 3. A* 64
65 Motion Planning: A* Search There are a set of algorithms called Best- First Search They try to search the children of the best node to expand. A* is a best first search algorithm It attempts to make the best node the one that will find the optimal solution and do so in less time. 65
66 Motion Planning: A* Search A* is optimal and complete, but can take time Its complexity depends on the heuristic, but is exponential with the size of the graph. 66
67 Motion Planning: A* Search We evaluate a node n for expansion based on the function: Where f(n) = g(n) + h(n) g(n) = path cost from the start node to n h(n) = estimated cost of the cheapest path from node n to the goal 67
68 Motion Planning: A* Search Example: Cost for one particular node f(n) = g(n) + h(n) 68 n start n n goal g(n) = 1 h(n) = 2
69 Motion Planning: A* Search Example: Cost for each node f(n) = g(n) + h(n) g=2 h= 3 g=1 h=2 g=3 h= 2 g=4 h=1 n goal 69 n start g=1 h= 2 g=2 h=1
70 Motion Planning: A* Search The strategy is to expand the node with the cheapest path (lowest f ). This is proven to be complete and optimal, if h(n) is an admissible heuristic. 70
71 Motion Planning: A* Search Here, h(n) is an admissible heuristic is one that never overestimates the cost to the goal Example: the Euclidean distance. 71
72 Motion Planning: A* Search Search example: Iteration 1 Fringe set = { f 1 = 2.4, f 2 = 3} f=3 n goal 72 n start f=2.4
73 Motion Planning: A* Search Search example: Iteration 2 Fringe set = {f 2 = 3, f 3 = 3} f=3 n goal 73 n start f=2.4 f=3
74 Motion Planning: A* Search Search example: Iteration 3 Fringe set = {f 3 = 3, f 4 = 3.8} f=3.8 f=3 n goal 74 n start f=2.4 f=3
75 Motion Planning: A* Search Search example: Iteration 4 f=3.8 f=3 n goal 75 n start f=2.4 f=3
76 Motion Planning: Final Notes A * is often used as a global planner Planner that considers kinematic/dynamic constraints is used for local planning. 76
77 MP: Outline 1. Multi-Query PRMs 2. Graph Search 3. Artificial Potential Fields 77



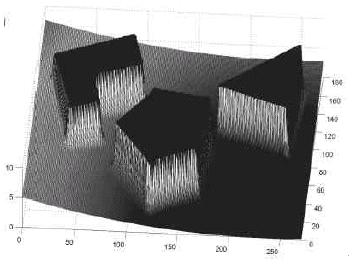
78 Artificial Potential Fields Potential field Define a function over the free space that has a global minimum at the goal configuration and follow its steepest descent 78
79 Artificial Potential Fields Electric Potentials The electric potential V E (J C -1 ) created by a point charge Q, at a distance r from the charge (relative to the potential at infinity), can be shown to be 79 V E = 1 Q 4πε 0 r

80 Artificial Potential Fields Electric Fields The electric field intensity E is defined as the force per unit positive charge that would be experienced by a point charge It is obtained by taking the negative gradient of the electric potential 80 E = - V E

81 Artificial Potential Fields Electric Potential Fields Different arrangements of charges can lead to various fields 81
82 Artificial Potential Fields In APFs, the robot is treated as a point under the influence of an artificial potential field. Electrical analogy: The generated robot movement is similar to an electric charge under the force of an electric field Mechanical analogy: The generated robot movement is similar to a ball rolling down the hill 82
83 Artificial Potential Fields In APFs Goals generates attractive force Obstacles generate repulsive forces 83
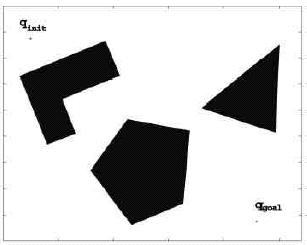
84 Artificial Potential Fields For a given configuration space and desired goal, place potentials on obstacles and goals q goal 84 q
85 Artificial Potential Fields For a given configuration space and desired goal, place potentials on obstacles and goals q goal 85 q
86 Artificial Potential Fields For any robot configuration q, the forces felt by the robot can be calculated to steer the robot towards the goal. q goal 86 q F attraction
87 87 Artificial Potential Fields
88 Potential Field Generation Given potential functions U, Generate artificial force field F(q) Sum all potentials (repulsive and attractive). Differentiate to determine forces Note: functions must be differentiable F(q) = - U(q) = - U att (q) - U rep (q) = - δu/ δx - δu/ δy 88
89 Attractive Potential Fields Parabolic function representing the Euclidean distance ρ goal (q) = q - q goal to the goal. 89 U att (q) = 1 k att ρ 2 goal (q) Attracting force converges linearly towards 0 (goal) F att (q) = - 2 U att (q) = - k att (q - q goal )
90 Repulsive Potential Fields Generate a barrier around the obstacle Does not influence robot if far from the obstacle U rep (q) = 1 k rep if ρ(q) ρ 0 2 ρ(q) ρ 0 0 if ρ(q) > ρ 0 90 Where ρ(q) = q - q obst is the minimum distance to the object
91 Repulsive Potential Fields Field is positive or zero and tends to infinity as q gets closer to the object F rep (q) = - U rep (q) = k rep 1-1 q - q obst if ρ(q) ρ 0 ρ(q) ρ 0 ρ 3 (q) 0 if ρ(q) > ρ 0 91
92 Artificial Potential Fields Given current configuration of the robot q 1. Sum total force vectors F(q) generated by the potential fields. 2. Set desired robot velocity (v, w) proportional to the force F(q) q goal q F attraction 92 F repulsion F total
93 Artificial Potential Fields Local minimums q goal 93 If objects are not convex (i.e. concave), there exist situations where several minimal distances exist and can result in oscillations Not complete
94 Artificial Potential Fields Extended Potential Fields Many modifications to potential fields have been done in order to improve completeness, optimality. Example: Orientation based potentials Can increase potential depending on orientation of robot Robot Repulsion force 94 Object
95 Artificial Potential Fields Extended Potential Fields Also, can use rotational fields in one direction 95 Linear source Rotational source

96 Artificial Potential Fields Example: 96
Search then involves moving from state-to-state in the problem space to find a goal (or to terminate without finding a goal).
.") Search Can often solve a problem using search. Two requirements to use search: Goal Formulation. Need goals to limit search and allow termination. Problem formulation. Compact representation of problem
Search Can often solve a problem using search. Two requirements to use search: Goal Formulation. Need goals to limit search and allow termination. Problem formulation. Compact representation of problem
Foundations of AI. 3. Solving Problems by Searching. Problem-Solving Agents, Formulating Problems, Search Strategies
 Foundations of AI 3. Solving Problems by Searching Problem-Solving Agents, Formulating Problems, Search Strategies Luc De Raedt and Wolfram Burgard and Bernhard Nebel Contents Problem-Solving Agents Formulating
Foundations of AI 3. Solving Problems by Searching Problem-Solving Agents, Formulating Problems, Search Strategies Luc De Raedt and Wolfram Burgard and Bernhard Nebel Contents Problem-Solving Agents Formulating
Informed search algorithms. Chapter 3 (Based on Slides by Stuart Russell, Richard Korf, Subbarao Kambhampati, and UW-AI faculty)
") Informed search algorithms Chapter 3 (Based on Slides by Stuart Russell, Richard Korf, Subbarao Kambhampati, and UW-AI faculty) Intuition, like the rays of the sun, acts only in an inflexibly straight
Informed search algorithms Chapter 3 (Based on Slides by Stuart Russell, Richard Korf, Subbarao Kambhampati, and UW-AI faculty) Intuition, like the rays of the sun, acts only in an inflexibly straight
Improvement of Robot Path Planning Using Particle. Swarm Optimization in Dynamic Environments. with Mobile Obstacles and Target
 Advanced Studies in Biology, Vol. 3, 2011, no. 1, 43-53 Improvement of Robot Path Planning Using Particle Swarm Optimization in Dynamic Environments with Mobile Obstacles and Target Maryam Yarmohamadi
Advanced Studies in Biology, Vol. 3, 2011, no. 1, 43-53 Improvement of Robot Path Planning Using Particle Swarm Optimization in Dynamic Environments with Mobile Obstacles and Target Maryam Yarmohamadi
Randomized Motion Planning for Groups of Nonholonomic Robots
 Randomized Motion Planning for Groups of Nonholonomic Robots Christopher M Clark chrisc@sun-valleystanfordedu Stephen Rock rock@sun-valleystanfordedu Department of Aeronautics & Astronautics Stanford University
Randomized Motion Planning for Groups of Nonholonomic Robots Christopher M Clark chrisc@sun-valleystanfordedu Stephen Rock rock@sun-valleystanfordedu Department of Aeronautics & Astronautics Stanford University
Motion planning in mobile robots. Britta Schulte 3. November 2014
 Motion planning in mobile robots Britta Schulte 3. November 2014 Motion planning in mobile robots Introduction Basic Problem and Configuration Space Planning Algorithms Roadmap Cell Decomposition Potential
Motion planning in mobile robots Britta Schulte 3. November 2014 Motion planning in mobile robots Introduction Basic Problem and Configuration Space Planning Algorithms Roadmap Cell Decomposition Potential
Foundations of AI. 3. Solving Problems by Searching. Problem-Solving Agents, Formulating Problems, Search Strategies
 Foundations of AI 3. Solving Problems by Searching Problem-Solving Agents, Formulating Problems, Search Strategies Wolfram Burgard, Andreas Karwath, Bernhard Nebel, and Martin Riedmiller SA-1 Contents
Foundations of AI 3. Solving Problems by Searching Problem-Solving Agents, Formulating Problems, Search Strategies Wolfram Burgard, Andreas Karwath, Bernhard Nebel, and Martin Riedmiller SA-1 Contents
Outline for today s lecture Informed Search Optimal informed search: A* (AIMA 3.5.2) Creating good heuristic functions Hill Climbing
 Creating good heuristic functions Hill Climbing") Informed Search II Outline for today s lecture Informed Search Optimal informed search: A* (AIMA 3.5.2) Creating good heuristic functions Hill Climbing CIS 521 - Intro to AI - Fall 2017 2 Review: Greedy
Informed Search II Outline for today s lecture Informed Search Optimal informed search: A* (AIMA 3.5.2) Creating good heuristic functions Hill Climbing CIS 521 - Intro to AI - Fall 2017 2 Review: Greedy
Solving Problems by Searching
 Solving Problems by Searching Berlin Chen 2005 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 3 AI - Berlin Chen 1 Introduction Problem-Solving Agents vs. Reflex
Solving Problems by Searching Berlin Chen 2005 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 3 AI - Berlin Chen 1 Introduction Problem-Solving Agents vs. Reflex
Artificial Intelligence Lecture 3
 Artificial Intelligence Lecture 3 The problem Depth first Not optimal Uses O(n) space Optimal Uses O(B n ) space Can we combine the advantages of both approaches? 2 Iterative deepening (IDA) Let M be a
Artificial Intelligence Lecture 3 The problem Depth first Not optimal Uses O(n) space Optimal Uses O(B n ) space Can we combine the advantages of both approaches? 2 Iterative deepening (IDA) Let M be a
Path Planning in Dynamic Environments Using Time Warps. S. Farzan and G. N. DeSouza
 Path Planning in Dynamic Environments Using Time Warps S. Farzan and G. N. DeSouza Outline Introduction Harmonic Potential Fields Rubber Band Model Time Warps Kalman Filtering Experimental Results 2 Introduction
Path Planning in Dynamic Environments Using Time Warps S. Farzan and G. N. DeSouza Outline Introduction Harmonic Potential Fields Rubber Band Model Time Warps Kalman Filtering Experimental Results 2 Introduction
Heuristics & Pattern Databases for Search Dan Weld
 CSE 473: Artificial Intelligence Autumn 2014 Heuristics & Pattern Databases for Search Dan Weld Logistics PS1 due Monday 10/13 Office hours Jeff today 10:30am CSE 021 Galen today 1-3pm CSE 218 See Website
CSE 473: Artificial Intelligence Autumn 2014 Heuristics & Pattern Databases for Search Dan Weld Logistics PS1 due Monday 10/13 Office hours Jeff today 10:30am CSE 021 Galen today 1-3pm CSE 218 See Website
An Improved Path Planning Method Based on Artificial Potential Field for a Mobile Robot
 BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 15, No Sofia 015 Print ISSN: 1311-970; Online ISSN: 1314-4081 DOI: 10.1515/cait-015-0037 An Improved Path Planning Method Based
BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 15, No Sofia 015 Print ISSN: 1311-970; Online ISSN: 1314-4081 DOI: 10.1515/cait-015-0037 An Improved Path Planning Method Based
Kinodynamic Motion Planning Amidst Moving Obstacles
 TO APPEAR IN IEEE International Conference on Robotics and Automation, 2000 Kinodynamic Motion Planning Amidst Moving Obstacles Robert Kindel David Hsu y Jean-Claude Latombe y Stephen Rock y Department
TO APPEAR IN IEEE International Conference on Robotics and Automation, 2000 Kinodynamic Motion Planning Amidst Moving Obstacles Robert Kindel David Hsu y Jean-Claude Latombe y Stephen Rock y Department
COS Lecture 7 Autonomous Robot Navigation
 COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Informed Search. Read AIMA Some materials will not be covered in lecture, but will be on the midterm.
 Informed Search Read AIMA 3.1-3.6. Some materials will not be covered in lecture, but will be on the midterm. Reminder HW due tonight HW1 is due tonight before 11:59pm. Please submit early. 1 second late
Informed Search Read AIMA 3.1-3.6. Some materials will not be covered in lecture, but will be on the midterm. Reminder HW due tonight HW1 is due tonight before 11:59pm. Please submit early. 1 second late
Yusuke Tamura. Atsushi Yamashita and Hajime Asama
 Int. J. Mechatronics and Automation, Vol. 3, No. 3, 2013 141 Effective improved artificial potential field-based regression search method for autonomous mobile robot path planning Guanghui Li* Department
Int. J. Mechatronics and Automation, Vol. 3, No. 3, 2013 141 Effective improved artificial potential field-based regression search method for autonomous mobile robot path planning Guanghui Li* Department
Unit 12: Artificial Intelligence CS 101, Fall 2018
 Unit 12: Artificial Intelligence CS 101, Fall 2018 Learning Objectives After completing this unit, you should be able to: Explain the difference between procedural and declarative knowledge. Describe the
Unit 12: Artificial Intelligence CS 101, Fall 2018 Learning Objectives After completing this unit, you should be able to: Explain the difference between procedural and declarative knowledge. Describe the
Kinodynamic Motion Planning Amidst Moving Obstacles
 SUBMITTED TO IEEE International Conference on Robotics and Automation, 2000 Kinodynamic Motion Planning Amidst Moving Obstacles Robert Kindel David Hsu y Jean-Claude Latombe y Stephen Rock y Department
SUBMITTED TO IEEE International Conference on Robotics and Automation, 2000 Kinodynamic Motion Planning Amidst Moving Obstacles Robert Kindel David Hsu y Jean-Claude Latombe y Stephen Rock y Department
Informed search algorithms
 Informed search algorithms Chapter 3, Sections 5 6 Artificial Intelligence, spring 2013, Peter Ljunglöf; based on AIMA Slides c Stuart Russel and Peter Norvig, 2004 Chapter 3, Sections 5 6 1 Review: Tree
Informed search algorithms Chapter 3, Sections 5 6 Artificial Intelligence, spring 2013, Peter Ljunglöf; based on AIMA Slides c Stuart Russel and Peter Norvig, 2004 Chapter 3, Sections 5 6 1 Review: Tree
Homework Assignment #1
 CS 540-2: Introduction to Artificial Intelligence Homework Assignment #1 Assigned: Thursday, February 1, 2018 Due: Sunday, February 11, 2018 Hand-in Instructions: This homework assignment includes two
CS 540-2: Introduction to Artificial Intelligence Homework Assignment #1 Assigned: Thursday, February 1, 2018 Due: Sunday, February 11, 2018 Hand-in Instructions: This homework assignment includes two
Path Planning of Mobile Robot Using Fuzzy- Potential Field Method
 Path Planning of Mobile Robot Using Fuzzy- Potential Field Method Alaa A. Ahmed Department of Electrical Engineering University of Basrah, Basrah,Iraq alaarasol16@yahoo.com Turki Y. Abdalla Department
Path Planning of Mobile Robot Using Fuzzy- Potential Field Method Alaa A. Ahmed Department of Electrical Engineering University of Basrah, Basrah,Iraq alaarasol16@yahoo.com Turki Y. Abdalla Department
AIMA 3.5. Smarter Search. David Cline
 AIMA 3.5 Smarter Search David Cline Uninformed search Depth-first Depth-limited Iterative deepening Breadth-first Bidirectional search None of these searches take into account how close you are to the
AIMA 3.5 Smarter Search David Cline Uninformed search Depth-first Depth-limited Iterative deepening Breadth-first Bidirectional search None of these searches take into account how close you are to the
CS 387: GAME AI BOARD GAMES. 5/24/2016 Instructor: Santiago Ontañón
 CS 387: GAME AI BOARD GAMES 5/24/2016 Instructor: Santiago Ontañón santi@cs.drexel.edu Class website: https://www.cs.drexel.edu/~santi/teaching/2016/cs387/intro.html Reminders Check BBVista site for the
CS 387: GAME AI BOARD GAMES 5/24/2016 Instructor: Santiago Ontañón santi@cs.drexel.edu Class website: https://www.cs.drexel.edu/~santi/teaching/2016/cs387/intro.html Reminders Check BBVista site for the
Structure and Synthesis of Robot Motion
 Structure and Synthesis of Robot Motion Motion Synthesis in Groups and Formations I Subramanian Ramamoorthy School of Informatics 5 March 2012 Consider Motion Problems with Many Agents How should we model
Structure and Synthesis of Robot Motion Motion Synthesis in Groups and Formations I Subramanian Ramamoorthy School of Informatics 5 March 2012 Consider Motion Problems with Many Agents How should we model
CS 171, Intro to A.I. Midterm Exam Fall Quarter, 2016
 CS 171, Intro to A.I. Midterm Exam all Quarter, 2016 YOUR NAME: YOUR ID: ROW: SEAT: The exam will begin on the next page. Please, do not turn the page until told. When you are told to begin the exam, please
CS 171, Intro to A.I. Midterm Exam all Quarter, 2016 YOUR NAME: YOUR ID: ROW: SEAT: The exam will begin on the next page. Please, do not turn the page until told. When you are told to begin the exam, please
May Edited by: Roemi E. Fernández Héctor Montes
 May 2016 Edited by: Roemi E. Fernández Héctor Montes RoboCity16 Open Conference on Future Trends in Robotics Editors Roemi E. Fernández Saavedra Héctor Montes Franceschi Madrid, 26 May 2016 Edited by:
May 2016 Edited by: Roemi E. Fernández Héctor Montes RoboCity16 Open Conference on Future Trends in Robotics Editors Roemi E. Fernández Saavedra Héctor Montes Franceschi Madrid, 26 May 2016 Edited by:
CRYPTOSHOOTER MULTI AGENT BASED SECRET COMMUNICATION IN AUGMENTED VIRTUALITY
 CRYPTOSHOOTER MULTI AGENT BASED SECRET COMMUNICATION IN AUGMENTED VIRTUALITY Submitted By: Sahil Narang, Sarah J Andrabi PROJECT IDEA The main idea for the project is to create a pursuit and evade crowd
CRYPTOSHOOTER MULTI AGENT BASED SECRET COMMUNICATION IN AUGMENTED VIRTUALITY Submitted By: Sahil Narang, Sarah J Andrabi PROJECT IDEA The main idea for the project is to create a pursuit and evade crowd
Problem 1. (15 points) Consider the so-called Cryptarithmetic problem shown below.
 Consider the so-called Cryptarithmetic problem shown below.") ECS 170 - Intro to Artificial Intelligence Suggested Solutions Mid-term Examination (100 points) Open textbook and open notes only Show your work clearly Winter 2003 Problem 1. (15 points) Consider the
ECS 170 - Intro to Artificial Intelligence Suggested Solutions Mid-term Examination (100 points) Open textbook and open notes only Show your work clearly Winter 2003 Problem 1. (15 points) Consider the
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (6 pts )A 2-DOF manipulator arm is attached to a mobile base with non-holonomic
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (6 pts )A 2-DOF manipulator arm is attached to a mobile base with non-holonomic
Integrating Phased Array Path Planning with Intelligent Satellite Scheduling
 Integrating Phased Array Path Planning with Intelligent Satellite Scheduling Randy Jensen 1, Richard Stottler 2, David Breeden 3, Bart Presnell 4, and Kyle Mahan 5 Stottler Henke Associates, Inc., San
Integrating Phased Array Path Planning with Intelligent Satellite Scheduling Randy Jensen 1, Richard Stottler 2, David Breeden 3, Bart Presnell 4, and Kyle Mahan 5 Stottler Henke Associates, Inc., San
Searching for Solu4ons. Searching for Solu4ons. Example: Traveling Romania. Example: Vacuum World 9/8/09
 Searching for Solu4ons Searching for Solu4ons CISC481/681, Lecture #3 Ben Cartere@e Characterize a task or problem as a search for something In the agent view, a search for a sequence of ac4ons that will
Searching for Solu4ons Searching for Solu4ons CISC481/681, Lecture #3 Ben Cartere@e Characterize a task or problem as a search for something In the agent view, a search for a sequence of ac4ons that will
UMBC 671 Midterm Exam 19 October 2009
 Name: 0 1 2 3 4 5 6 total 0 20 25 30 30 25 20 150 UMBC 671 Midterm Exam 19 October 2009 Write all of your answers on this exam, which is closed book and consists of six problems, summing to 160 points.
Name: 0 1 2 3 4 5 6 total 0 20 25 30 30 25 20 150 UMBC 671 Midterm Exam 19 October 2009 Write all of your answers on this exam, which is closed book and consists of six problems, summing to 160 points.
Heuristics, and what to do if you don t know what to do. Carl Hultquist
 Heuristics, and what to do if you don t know what to do Carl Hultquist What is a heuristic? Relating to or using a problem-solving technique in which the most appropriate solution of several found by alternative
Heuristics, and what to do if you don t know what to do Carl Hultquist What is a heuristic? Relating to or using a problem-solving technique in which the most appropriate solution of several found by alternative
21073 Hamburg, Germany.
 Journal of Advances in Mechanical Engineering and Science, Vol. 2(4) 2016, pp. 25-34 RESEARCH ARTICLE Virtual Obstacle Parameter Optimization for Mobile Robot Path Planning- A Case Study * Hussein Hamdy
Journal of Advances in Mechanical Engineering and Science, Vol. 2(4) 2016, pp. 25-34 RESEARCH ARTICLE Virtual Obstacle Parameter Optimization for Mobile Robot Path Planning- A Case Study * Hussein Hamdy
Decision Science Letters
 Decision Science Letters 3 (2014) 121 130 Contents lists available at GrowingScience Decision Science Letters homepage: www.growingscience.com/dsl A new effective algorithm for on-line robot motion planning
Decision Science Letters 3 (2014) 121 130 Contents lists available at GrowingScience Decision Science Letters homepage: www.growingscience.com/dsl A new effective algorithm for on-line robot motion planning
UNIVERSITY of PENNSYLVANIA CIS 391/521: Fundamentals of AI Midterm 1, Spring 2010
 UNIVERSITY of PENNSYLVANIA CIS 391/521: Fundamentals of AI Midterm 1, Spring 2010 Question Points 1 Environments /2 2 Python /18 3 Local and Heuristic Search /35 4 Adversarial Search /20 5 Constraint Satisfaction
UNIVERSITY of PENNSYLVANIA CIS 391/521: Fundamentals of AI Midterm 1, Spring 2010 Question Points 1 Environments /2 2 Python /18 3 Local and Heuristic Search /35 4 Adversarial Search /20 5 Constraint Satisfaction
Motion Planning in Dynamic Environments
 Motion Planning in Dynamic Environments Trajectory Following, D*, Gyroscopic Forces MEM380: Applied Autonomous Robots I 2012 1 Trajectory Following Assume Unicycle model for robot (x, y, θ) v = v const
Motion Planning in Dynamic Environments Trajectory Following, D*, Gyroscopic Forces MEM380: Applied Autonomous Robots I 2012 1 Trajectory Following Assume Unicycle model for robot (x, y, θ) v = v const
Outline. Game Playing. Game Problems. Game Problems. Types of games Playing a perfect game. Playing an imperfect game
 Outline Game Playing ECE457 Applied Artificial Intelligence Fall 2007 Lecture #5 Types of games Playing a perfect game Minimax search Alpha-beta pruning Playing an imperfect game Real-time Imperfect information
Outline Game Playing ECE457 Applied Artificial Intelligence Fall 2007 Lecture #5 Types of games Playing a perfect game Minimax search Alpha-beta pruning Playing an imperfect game Real-time Imperfect information
Artificial Neural Network based Mobile Robot Navigation
 Artificial Neural Network based Mobile Robot Navigation István Engedy Budapest University of Technology and Economics, Department of Measurement and Information Systems, Magyar tudósok körútja 2. H-1117,
Artificial Neural Network based Mobile Robot Navigation István Engedy Budapest University of Technology and Economics, Department of Measurement and Information Systems, Magyar tudósok körútja 2. H-1117,
HAPTIC GUIDANCE BASED ON HARMONIC FUNCTIONS FOR THE EXECUTION OF TELEOPERATED ASSEMBLY TASKS. Carlos Vázquez Jan Rosell,1
 Preprints of IAD' 2007: IFAC WORKSHOP ON INTELLIGENT ASSEMBLY AND DISASSEMBLY May 23-25 2007, Alicante, Spain HAPTIC GUIDANCE BASED ON HARMONIC FUNCTIONS FOR THE EXECUTION OF TELEOPERATED ASSEMBLY TASKS
Preprints of IAD' 2007: IFAC WORKSHOP ON INTELLIGENT ASSEMBLY AND DISASSEMBLY May 23-25 2007, Alicante, Spain HAPTIC GUIDANCE BASED ON HARMONIC FUNCTIONS FOR THE EXECUTION OF TELEOPERATED ASSEMBLY TASKS
: Principles of Automated Reasoning and Decision Making Midterm
 16.410-13: Principles of Automated Reasoning and Decision Making Midterm October 20 th, 2003 Name E-mail Note: Budget your time wisely. Some parts of this quiz could take you much longer than others. Move
16.410-13: Principles of Automated Reasoning and Decision Making Midterm October 20 th, 2003 Name E-mail Note: Budget your time wisely. Some parts of this quiz could take you much longer than others. Move
CS 771 Artificial Intelligence. Adversarial Search
 CS 771 Artificial Intelligence Adversarial Search Typical assumptions Two agents whose actions alternate Utility values for each agent are the opposite of the other This creates the adversarial situation
CS 771 Artificial Intelligence Adversarial Search Typical assumptions Two agents whose actions alternate Utility values for each agent are the opposite of the other This creates the adversarial situation
the question of whether computers can think is like the question of whether submarines can swim -- Dijkstra
 the question of whether computers can think is like the question of whether submarines can swim -- Dijkstra Game AI: The set of algorithms, representations, tools, and tricks that support the creation
the question of whether computers can think is like the question of whether submarines can swim -- Dijkstra Game AI: The set of algorithms, representations, tools, and tricks that support the creation
A GRASP HEURISTIC FOR THE COOPERATIVE COMMUNICATION PROBLEM IN AD HOC NETWORKS
 A GRASP HEURISTIC FOR THE COOPERATIVE COMMUNICATION PROBLEM IN AD HOC NETWORKS C. COMMANDER, C.A.S. OLIVEIRA, P.M. PARDALOS, AND M.G.C. RESENDE ABSTRACT. Ad hoc networks are composed of a set of wireless
A GRASP HEURISTIC FOR THE COOPERATIVE COMMUNICATION PROBLEM IN AD HOC NETWORKS C. COMMANDER, C.A.S. OLIVEIRA, P.M. PARDALOS, AND M.G.C. RESENDE ABSTRACT. Ad hoc networks are composed of a set of wireless
Set 4: Game-Playing. ICS 271 Fall 2017 Kalev Kask
 Set 4: Game-Playing ICS 271 Fall 2017 Kalev Kask Overview Computer programs that play 2-player games game-playing as search with the complication of an opponent General principles of game-playing and search
Set 4: Game-Playing ICS 271 Fall 2017 Kalev Kask Overview Computer programs that play 2-player games game-playing as search with the complication of an opponent General principles of game-playing and search
CSE 573: Artificial Intelligence Autumn 2010
 CSE 573: Artificial Intelligence Autumn 2010 Lecture 4: Adversarial Search 10/12/2009 Luke Zettlemoyer Based on slides from Dan Klein Many slides over the course adapted from either Stuart Russell or Andrew
CSE 573: Artificial Intelligence Autumn 2010 Lecture 4: Adversarial Search 10/12/2009 Luke Zettlemoyer Based on slides from Dan Klein Many slides over the course adapted from either Stuart Russell or Andrew
A GRASP heuristic for the Cooperative Communication Problem in Ad Hoc Networks
 MIC2005: The Sixth Metaheuristics International Conference??-1 A GRASP heuristic for the Cooperative Communication Problem in Ad Hoc Networks Clayton Commander Carlos A.S. Oliveira Panos M. Pardalos Mauricio
MIC2005: The Sixth Metaheuristics International Conference??-1 A GRASP heuristic for the Cooperative Communication Problem in Ad Hoc Networks Clayton Commander Carlos A.S. Oliveira Panos M. Pardalos Mauricio
Informatics 2D: Tutorial 1 (Solutions)
") Informatics 2D: Tutorial 1 (Solutions) Agents, Environment, Search Week 2 1 Agents and Environments Consider the following agents: A robot vacuum cleaner which follows a pre-set route around a house and
Informatics 2D: Tutorial 1 (Solutions) Agents, Environment, Search Week 2 1 Agents and Environments Consider the following agents: A robot vacuum cleaner which follows a pre-set route around a house and
Simple Search Algorithms
 Lecture 3 of Artificial Intelligence Simple Search Algorithms AI Lec03/1 Topics of this lecture Random search Search with closed list Search with open list Depth-first and breadth-first search again Uniform-cost
Lecture 3 of Artificial Intelligence Simple Search Algorithms AI Lec03/1 Topics of this lecture Random search Search with closed list Search with open list Depth-first and breadth-first search again Uniform-cost
CSE 573 Problem Set 1. Answers on 10/17/08
 CSE 573 Problem Set. Answers on 0/7/08 Please work on this problem set individually. (Subsequent problem sets may allow group discussion. If any problem doesn t contain enough information for you to answer
CSE 573 Problem Set. Answers on 0/7/08 Please work on this problem set individually. (Subsequent problem sets may allow group discussion. If any problem doesn t contain enough information for you to answer
Robot Team Formation Control using Communication "Throughput Approach"
 University of Denver Digital Commons @ DU Electronic Theses and Dissertations Graduate Studies 1-1-2013 Robot Team Formation Control using Communication "Throughput Approach" FatmaZahra Ahmed BenHalim
University of Denver Digital Commons @ DU Electronic Theses and Dissertations Graduate Studies 1-1-2013 Robot Team Formation Control using Communication "Throughput Approach" FatmaZahra Ahmed BenHalim
Conversion Masters in IT (MIT) AI as Representation and Search. (Representation and Search Strategies) Lecture 002. Sandro Spina
 AI as Representation and Search. (Representation and Search Strategies) Lecture 002. Sandro Spina") Conversion Masters in IT (MIT) AI as Representation and Search (Representation and Search Strategies) Lecture 002 Sandro Spina Physical Symbol System Hypothesis Intelligent Activity is achieved through
Conversion Masters in IT (MIT) AI as Representation and Search (Representation and Search Strategies) Lecture 002 Sandro Spina Physical Symbol System Hypothesis Intelligent Activity is achieved through
Heuristic Search with Pre-Computed Databases
 Heuristic Search with Pre-Computed Databases Tsan-sheng Hsu tshsu@iis.sinica.edu.tw http://www.iis.sinica.edu.tw/~tshsu 1 Abstract Use pre-computed partial results to improve the efficiency of heuristic
Heuristic Search with Pre-Computed Databases Tsan-sheng Hsu tshsu@iis.sinica.edu.tw http://www.iis.sinica.edu.tw/~tshsu 1 Abstract Use pre-computed partial results to improve the efficiency of heuristic
Travel time uncertainty and network models
 Travel time uncertainty and network models CE 392C TRAVEL TIME UNCERTAINTY One major assumption throughout the semester is that travel times can be predicted exactly and are the same every day. C = 25.87321
Travel time uncertainty and network models CE 392C TRAVEL TIME UNCERTAINTY One major assumption throughout the semester is that travel times can be predicted exactly and are the same every day. C = 25.87321
An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots
 An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany maren,burgard
An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany maren,burgard
PSO based path planner of an autonomous mobile robot
 Cent. Eur. J. Comp. Sci. 2(2) 2012 152-168 DOI: 10.2478/s13537-012-0009-5 Central European Journal of Computer Science PSO based path planner of an autonomous mobile robot Research Article BBVL Deepak
Cent. Eur. J. Comp. Sci. 2(2) 2012 152-168 DOI: 10.2478/s13537-012-0009-5 Central European Journal of Computer Science PSO based path planner of an autonomous mobile robot Research Article BBVL Deepak
CS 188 Introduction to Fall 2014 Artificial Intelligence Midterm
 CS 88 Introduction to Fall Artificial Intelligence Midterm INSTRUCTIONS You have 8 minutes. The exam is closed book, closed notes except a one-page crib sheet. Please use non-programmable calculators only.
CS 88 Introduction to Fall Artificial Intelligence Midterm INSTRUCTIONS You have 8 minutes. The exam is closed book, closed notes except a one-page crib sheet. Please use non-programmable calculators only.
10/5/2015. Constraint Satisfaction Problems. Example: Cryptarithmetic. Example: Map-coloring. Example: Map-coloring. Constraint Satisfaction Problems
 0/5/05 Constraint Satisfaction Problems Constraint Satisfaction Problems AIMA: Chapter 6 A CSP consists of: Finite set of X, X,, X n Nonempty domain of possible values for each variable D, D, D n where
0/5/05 Constraint Satisfaction Problems Constraint Satisfaction Problems AIMA: Chapter 6 A CSP consists of: Finite set of X, X,, X n Nonempty domain of possible values for each variable D, D, D n where
Game-Playing & Adversarial Search
 Game-Playing & Adversarial Search This lecture topic: Game-Playing & Adversarial Search (two lectures) Chapter 5.1-5.5 Next lecture topic: Constraint Satisfaction Problems (two lectures) Chapter 6.1-6.4,
Game-Playing & Adversarial Search This lecture topic: Game-Playing & Adversarial Search (two lectures) Chapter 5.1-5.5 Next lecture topic: Constraint Satisfaction Problems (two lectures) Chapter 6.1-6.4,
Problem Solving and Search
 Artificial Intelligence Topic 3 Problem Solving and Search Problem-solving and search Search algorithms Uninformed search algorithms breadth-first search uniform-cost search depth-first search iterative
Artificial Intelligence Topic 3 Problem Solving and Search Problem-solving and search Search algorithms Uninformed search algorithms breadth-first search uniform-cost search depth-first search iterative
Robot Motion Control and Planning
 Robot Motion Control and Planning http://www.cs.bilkent.edu.tr/~saranli/courses/cs548 Lecture 1 Introduction and Logistics Uluç Saranlı http://www.cs.bilkent.edu.tr/~saranli CS548 - Robot Motion Control
Robot Motion Control and Planning http://www.cs.bilkent.edu.tr/~saranli/courses/cs548 Lecture 1 Introduction and Logistics Uluç Saranlı http://www.cs.bilkent.edu.tr/~saranli CS548 - Robot Motion Control
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
COMP5211 Lecture 3: Agents that Search
 CMP5211 Lecture 3: Agents that Search Fangzhen Lin Department of Computer Science and Engineering Hong Kong University of Science and Technology Fangzhen Lin (HKUST) Lecture 3: Search 1 / 66 verview Search
CMP5211 Lecture 3: Agents that Search Fangzhen Lin Department of Computer Science and Engineering Hong Kong University of Science and Technology Fangzhen Lin (HKUST) Lecture 3: Search 1 / 66 verview Search
Craiova. Dobreta. Eforie. 99 Fagaras. Giurgiu. Hirsova. Iasi. Lugoj. Mehadia. Neamt. Oradea. 97 Pitesti. Sibiu. Urziceni Vaslui.
 Informed search algorithms Chapter 4, Sections 1{2, 4 AIMA Slides cstuart Russell and Peter Norvig, 1998 Chapter 4, Sections 1{2, 4 1 Outline } Best-rst search } A search } Heuristics } Hill-climbing }
Informed search algorithms Chapter 4, Sections 1{2, 4 AIMA Slides cstuart Russell and Peter Norvig, 1998 Chapter 4, Sections 1{2, 4 1 Outline } Best-rst search } A search } Heuristics } Hill-climbing }
Adversarial Search. Human-aware Robotics. 2018/01/25 Chapter 5 in R&N 3rd Ø Announcement: Slides for this lecture are here:
 Adversarial Search 2018/01/25 Chapter 5 in R&N 3rd Ø Announcement: q Slides for this lecture are here: http://www.public.asu.edu/~yzhan442/teaching/cse471/lectures/adversarial.pdf Slides are largely based
Adversarial Search 2018/01/25 Chapter 5 in R&N 3rd Ø Announcement: q Slides for this lecture are here: http://www.public.asu.edu/~yzhan442/teaching/cse471/lectures/adversarial.pdf Slides are largely based
Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments
 Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments IMI Lab, Dept. of Computer Science University of North Carolina Charlotte Outline Problem and Context Basic RAMP Framework
Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments IMI Lab, Dept. of Computer Science University of North Carolina Charlotte Outline Problem and Context Basic RAMP Framework
6.034 Quiz 2 20 October 2010
 6.034 Quiz 2 20 October 2010 Name email Circle your TA and recitation time (for 1 point), so that we can more easily enter your score in our records and return your quiz to you promptly. TAs Thu Fri Martin
6.034 Quiz 2 20 October 2010 Name email Circle your TA and recitation time (for 1 point), so that we can more easily enter your score in our records and return your quiz to you promptly. TAs Thu Fri Martin
Free Cell Solver. Copyright 2001 Kevin Atkinson Shari Holstege December 11, 2001
 Free Cell Solver Copyright 2001 Kevin Atkinson Shari Holstege December 11, 2001 Abstract We created an agent that plays the Free Cell version of Solitaire by searching through the space of possible sequences
Free Cell Solver Copyright 2001 Kevin Atkinson Shari Holstege December 11, 2001 Abstract We created an agent that plays the Free Cell version of Solitaire by searching through the space of possible sequences
Obstacle Displacement Prediction for Robot Motion Planning and Velocity Changes
 International Journal of Information and Electronics Engineering, Vol. 3, No. 3, May 13 Obstacle Displacement Prediction for Robot Motion Planning and Velocity Changes Soheila Dadelahi, Mohammad Reza Jahed
International Journal of Information and Electronics Engineering, Vol. 3, No. 3, May 13 Obstacle Displacement Prediction for Robot Motion Planning and Velocity Changes Soheila Dadelahi, Mohammad Reza Jahed
A Probabilistic Method for Planning Collision-free Trajectories of Multiple Mobile Robots
 A Probabilistic Method for Planning Collision-free Trajectories of Multiple Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany
A Probabilistic Method for Planning Collision-free Trajectories of Multiple Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany
Intelligent Agents & Search Problem Formulation. AIMA, Chapters 2,
 Intelligent Agents & Search Problem Formulation AIMA, Chapters 2, 3.1-3.2 Outline for today s lecture Intelligent Agents (AIMA 2.1-2) Task Environments Formulating Search Problems CIS 421/521 - Intro to
Intelligent Agents & Search Problem Formulation AIMA, Chapters 2, 3.1-3.2 Outline for today s lecture Intelligent Agents (AIMA 2.1-2) Task Environments Formulating Search Problems CIS 421/521 - Intro to
Adversarial Search 1
 Adversarial Search 1 Adversarial Search The ghosts trying to make pacman loose Can not come up with a giant program that plans to the end, because of the ghosts and their actions Goal: Eat lots of dots
Adversarial Search 1 Adversarial Search The ghosts trying to make pacman loose Can not come up with a giant program that plans to the end, because of the ghosts and their actions Goal: Eat lots of dots
22c:145 Artificial Intelligence
 22c:145 Artificial Intelligence Fall 2005 Informed Search and Exploration II Cesare Tinelli The University of Iowa Copyright 2001-05 Cesare Tinelli and Hantao Zhang. a a These notes are copyrighted material
22c:145 Artificial Intelligence Fall 2005 Informed Search and Exploration II Cesare Tinelli The University of Iowa Copyright 2001-05 Cesare Tinelli and Hantao Zhang. a a These notes are copyrighted material
Supervisory Control for Cost-Effective Redistribution of Robotic Swarms
 Supervisory Control for Cost-Effective Redistribution of Robotic Swarms Ruikun Luo Department of Mechaincal Engineering College of Engineering Carnegie Mellon University Pittsburgh, Pennsylvania 11 Email:
Supervisory Control for Cost-Effective Redistribution of Robotic Swarms Ruikun Luo Department of Mechaincal Engineering College of Engineering Carnegie Mellon University Pittsburgh, Pennsylvania 11 Email:
Announcements. CS 188: Artificial Intelligence Fall Today. Tree-Structured CSPs. Nearly Tree-Structured CSPs. Tree Decompositions*
 CS 188: Artificial Intelligence Fall 2010 Lecture 6: Adversarial Search 9/1/2010 Announcements Project 1: Due date pushed to 9/15 because of newsgroup / server outages Written 1: up soon, delayed a bit
CS 188: Artificial Intelligence Fall 2010 Lecture 6: Adversarial Search 9/1/2010 Announcements Project 1: Due date pushed to 9/15 because of newsgroup / server outages Written 1: up soon, delayed a bit
Online Replanning for Reactive Robot Motion: Practical Aspects
 Online Replanning for Reactive Robot Motion: Practical Aspects Eiichi Yoshida, Kazuhito Yokoi and Pierre Gergondet. Abstract We address practical issues to develop reactive motion planning method capable
Online Replanning for Reactive Robot Motion: Practical Aspects Eiichi Yoshida, Kazuhito Yokoi and Pierre Gergondet. Abstract We address practical issues to develop reactive motion planning method capable
Experimental Comparison of Uninformed and Heuristic AI Algorithms for N Puzzle Solution
 Experimental Comparison of Uninformed and Heuristic AI Algorithms for N Puzzle Solution Kuruvilla Mathew, Mujahid Tabassum and Mohana Ramakrishnan Swinburne University of Technology(Sarawak Campus), Jalan
Experimental Comparison of Uninformed and Heuristic AI Algorithms for N Puzzle Solution Kuruvilla Mathew, Mujahid Tabassum and Mohana Ramakrishnan Swinburne University of Technology(Sarawak Campus), Jalan
Extended Kalman Filtering
 Extended Kalman Filtering Andre Cornman, Darren Mei Stanford EE 267, Virtual Reality, Course Report, Instructors: Gordon Wetzstein and Robert Konrad Abstract When working with virtual reality, one of the
Extended Kalman Filtering Andre Cornman, Darren Mei Stanford EE 267, Virtual Reality, Course Report, Instructors: Gordon Wetzstein and Robert Konrad Abstract When working with virtual reality, one of the
Artificial Intelligence Uninformed search
 Artificial Intelligence Uninformed search Peter Antal antal@mit.bme.hu A.I. Uninformed search 1 The symbols&search hypothesis for AI Problem-solving agents A kind of goal-based agent Problem types Single
Artificial Intelligence Uninformed search Peter Antal antal@mit.bme.hu A.I. Uninformed search 1 The symbols&search hypothesis for AI Problem-solving agents A kind of goal-based agent Problem types Single
Game Theory and Randomized Algorithms
 Game Theory and Randomized Algorithms Guy Aridor Game theory is a set of tools that allow us to understand how decisionmakers interact with each other. It has practical applications in economics, international
Game Theory and Randomized Algorithms Guy Aridor Game theory is a set of tools that allow us to understand how decisionmakers interact with each other. It has practical applications in economics, international
Lecture 14. Questions? Friday, February 10 CS 430 Artificial Intelligence - Lecture 14 1
 Lecture 14 Questions? Friday, February 10 CS 430 Artificial Intelligence - Lecture 14 1 Outline Chapter 5 - Adversarial Search Alpha-Beta Pruning Imperfect Real-Time Decisions Stochastic Games Friday,
Lecture 14 Questions? Friday, February 10 CS 430 Artificial Intelligence - Lecture 14 1 Outline Chapter 5 - Adversarial Search Alpha-Beta Pruning Imperfect Real-Time Decisions Stochastic Games Friday,
DIT411/TIN175, Artificial Intelligence. Peter Ljunglöf. 2 February, 2018
 DIT411/TIN175, Artificial Intelligence Chapters 4 5: Non-classical and adversarial search CHAPTERS 4 5: NON-CLASSICAL AND ADVERSARIAL SEARCH DIT411/TIN175, Artificial Intelligence Peter Ljunglöf 2 February,
DIT411/TIN175, Artificial Intelligence Chapters 4 5: Non-classical and adversarial search CHAPTERS 4 5: NON-CLASSICAL AND ADVERSARIAL SEARCH DIT411/TIN175, Artificial Intelligence Peter Ljunglöf 2 February,
2048: An Autonomous Solver
 2048: An Autonomous Solver Final Project in Introduction to Artificial Intelligence ABSTRACT. Our goal in this project was to create an automatic solver for the wellknown game 2048 and to analyze how different
2048: An Autonomous Solver Final Project in Introduction to Artificial Intelligence ABSTRACT. Our goal in this project was to create an automatic solver for the wellknown game 2048 and to analyze how different
TRIAL-BASED HEURISTIC TREE SEARCH FOR FINITE HORIZON MDPS. Thomas Keller and Malte Helmert Presented by: Ryan Berryhill
 TRIAL-BASED HEURISTIC TREE SEARCH FOR FINITE HORIZON MDPS Thomas Keller and Malte Helmert Presented by: Ryan Berryhill Outline Motivation Background THTS framework THTS algorithms Results Motivation Advances
TRIAL-BASED HEURISTIC TREE SEARCH FOR FINITE HORIZON MDPS Thomas Keller and Malte Helmert Presented by: Ryan Berryhill Outline Motivation Background THTS framework THTS algorithms Results Motivation Advances
CSC384 Introduction to Artificial Intelligence : Heuristic Search
 CSC384 Introduction to Artificial Intelligence : Heuristic Search September 18, 2014 September 18, 2014 1 / 12 Heuristic Search (A ) Primary concerns in heuristic search: Completeness Optimality Time complexity
CSC384 Introduction to Artificial Intelligence : Heuristic Search September 18, 2014 September 18, 2014 1 / 12 Heuristic Search (A ) Primary concerns in heuristic search: Completeness Optimality Time complexity
Path Planning with Fast Marching Methods
 Path Planning with Fast Marching Methods Ian Mitchell Department of Computer Science The University of British Columbia research supported by National Science and Engineering Research Council of Canada
Path Planning with Fast Marching Methods Ian Mitchell Department of Computer Science The University of British Columbia research supported by National Science and Engineering Research Council of Canada
ARTIFICIAL INTELLIGENCE (CS 370D)
") Princess Nora University Faculty of Computer & Information Systems ARTIFICIAL INTELLIGENCE (CS 370D) (CHAPTER-5) ADVERSARIAL SEARCH ADVERSARIAL SEARCH Optimal decisions Min algorithm α-β pruning Imperfect,
Princess Nora University Faculty of Computer & Information Systems ARTIFICIAL INTELLIGENCE (CS 370D) (CHAPTER-5) ADVERSARIAL SEARCH ADVERSARIAL SEARCH Optimal decisions Min algorithm α-β pruning Imperfect,
Plan Folding Motion for Rigid Origami via Discrete Domain Sampling
 Plan Folding Motion for Rigid Origami via Discrete Domain Sampling Zhonghua Xi and Jyh-Ming Lien Abstract Self-folding robot is usually modeled as rigid origami, a class of origami whose entire surface
Plan Folding Motion for Rigid Origami via Discrete Domain Sampling Zhonghua Xi and Jyh-Ming Lien Abstract Self-folding robot is usually modeled as rigid origami, a class of origami whose entire surface
Distributed Collaborative Path Planning in Sensor Networks with Multiple Mobile Sensor Nodes
 7th Mediterranean Conference on Control & Automation Makedonia Palace, Thessaloniki, Greece June 4-6, 009 Distributed Collaborative Path Planning in Sensor Networks with Multiple Mobile Sensor Nodes Theofanis
7th Mediterranean Conference on Control & Automation Makedonia Palace, Thessaloniki, Greece June 4-6, 009 Distributed Collaborative Path Planning in Sensor Networks with Multiple Mobile Sensor Nodes Theofanis
Decentralized Coordinated Motion for a Large Team of Robots Preserving Connectivity and Avoiding Collisions
 Decentralized Coordinated Motion for a Large Team of Robots Preserving Connectivity and Avoiding Collisions Anqi Li, Wenhao Luo, Sasanka Nagavalli, Student Member, IEEE, Katia Sycara, Fellow, IEEE Abstract
Decentralized Coordinated Motion for a Large Team of Robots Preserving Connectivity and Avoiding Collisions Anqi Li, Wenhao Luo, Sasanka Nagavalli, Student Member, IEEE, Katia Sycara, Fellow, IEEE Abstract
On the Probabilistic Foundations of Probabilistic Roadmaps (Extended Abstract)
") On the Probabilistic Foundations of Probabilistic Roadmaps (Extended Abstract) David Hsu 1, Jean-Claude Latombe 2, and Hanna Kurniawati 1 1 Department of Computer Science, National University of Singapore
On the Probabilistic Foundations of Probabilistic Roadmaps (Extended Abstract) David Hsu 1, Jean-Claude Latombe 2, and Hanna Kurniawati 1 1 Department of Computer Science, National University of Singapore
A Reconfigurable Guidance System
 Lecture tes for the Class: Unmanned Aircraft Design, Modeling and Control A Reconfigurable Guidance System Application to Unmanned Aerial Vehicles (UAVs) y b right aileron: a2 right elevator: e 2 rudder:
Lecture tes for the Class: Unmanned Aircraft Design, Modeling and Control A Reconfigurable Guidance System Application to Unmanned Aerial Vehicles (UAVs) y b right aileron: a2 right elevator: e 2 rudder:
Overview PROBLEM SOLVING AGENTS. Problem Solving Agents
 Overview PROBLEM SOLVING AGENTS Aims of the this lecture: introduce problem solving; introduce goal formulation; show how problems can be stated as state space search; show the importance and role of abstraction;
Overview PROBLEM SOLVING AGENTS Aims of the this lecture: introduce problem solving; introduce goal formulation; show how problems can be stated as state space search; show the importance and role of abstraction;
FAST GOAL NAVIGATION WITH OBSTACLE AVOIDANCE USING A DYNAMIC LOCAL VISUAL MODEL
 FAST GOAL NAVIGATION WITH OBSTACLE AVOIDANCE USING A DYNAMIC LOCAL VISUAL MODEL Juan Fasola jfasola@andrew.cmu.edu Manuela M. Veloso veloso@cs.cmu.edu School of Computer Science Carnegie Mellon University
FAST GOAL NAVIGATION WITH OBSTACLE AVOIDANCE USING A DYNAMIC LOCAL VISUAL MODEL Juan Fasola jfasola@andrew.cmu.edu Manuela M. Veloso veloso@cs.cmu.edu School of Computer Science Carnegie Mellon University
A Comparison of Particle Swarm Optimization and Gradient Descent in Training Wavelet Neural Network to Predict DGPS Corrections
 Proceedings of the World Congress on Engineering and Computer Science 00 Vol I WCECS 00, October 0-, 00, San Francisco, USA A Comparison of Particle Swarm Optimization and Gradient Descent in Training
Proceedings of the World Congress on Engineering and Computer Science 00 Vol I WCECS 00, October 0-, 00, San Francisco, USA A Comparison of Particle Swarm Optimization and Gradient Descent in Training
Conflict Management in Multiagent Robotic System: FSM and Fuzzy Logic Approach
 Conflict Management in Multiagent Robotic System: FSM and Fuzzy Logic Approach Witold Jacak* and Stephan Dreiseitl" and Karin Proell* and Jerzy Rozenblit** * Dept. of Software Engineering, Polytechnic
Conflict Management in Multiagent Robotic System: FSM and Fuzzy Logic Approach Witold Jacak* and Stephan Dreiseitl" and Karin Proell* and Jerzy Rozenblit** * Dept. of Software Engineering, Polytechnic
DYNAMIC ROBOT NETWORKS: A COORDINATION PLATFORM FOR MULTI-ROBOT SYSTEMS
 DYNAMIC ROBOT NETWORKS: A COORDINATION PLATFORM FOR MULTI-ROBOT SYSTEMS a dissertation submitted to the department of aeronautics and astronautics and the committee on graduate studies of stanford university
DYNAMIC ROBOT NETWORKS: A COORDINATION PLATFORM FOR MULTI-ROBOT SYSTEMS a dissertation submitted to the department of aeronautics and astronautics and the committee on graduate studies of stanford university
CS221 Project Final Report Gomoku Game Agent
 CS221 Project Final Report Gomoku Game Agent Qiao Tan qtan@stanford.edu Xiaoti Hu xiaotihu@stanford.edu 1 Introduction Gomoku, also know as five-in-a-row, is a strategy board game which is traditionally
CS221 Project Final Report Gomoku Game Agent Qiao Tan qtan@stanford.edu Xiaoti Hu xiaotihu@stanford.edu 1 Introduction Gomoku, also know as five-in-a-row, is a strategy board game which is traditionally
Robot Autonomy Project Auto Painting. Team: Ben Ballard Jimit Gandhi Mohak Bhardwaj Pratik Chatrath
 Robot Autonomy Project Auto Painting Team: Ben Ballard Jimit Gandhi Mohak Bhardwaj Pratik Chatrath Goal -Get HERB to paint autonomously Overview Initial Setup of Environment Problems to Solve Paintings:HERB,
Robot Autonomy Project Auto Painting Team: Ben Ballard Jimit Gandhi Mohak Bhardwaj Pratik Chatrath Goal -Get HERB to paint autonomously Overview Initial Setup of Environment Problems to Solve Paintings:HERB,