Prof. Maria Papadopouli
|
|
|
- Camron Weaver
- 5 years ago
- Views:
Transcription


1 Lecture on Positioning Prof. Maria Papadopouli University of Crete ICS-FORTH 1
2 Roadmap Location Sensing Overview Location sensing techniques Location sensing properties Survey of location systems 2
3 Importance of Location Sensing Mapping systems Locating people & objects Emergency situations/mobile devices Wireless routing Supporting ambient intelligence spaces location-based applications/services assistive technology applications 3
4 Location System Properties Location description: physical vs. symbolic Coordination systems: Absolute vs. relative location Methodology for estimating distances, orientation, position Computations: Localized vs. remote Requirements: Accuracy, Precision, Privacy, Identification Scale Cost Limitations & dependencies infrastructure vs. ad hoc hardware availability multiple modalities (e.g., RF, ultrasonic, vision, touch sensors) 4
5 Accuracy vs. Precision A result is considered accurate if it is consistent with the true or accepted value for that result Precision refers to the repeatability of measurement Does not require us to know the correct or true value Indicates how sharply a result has been defined 5
6 Location Sensing Techniques Distance- vs. signature-based approaches Distance-based 1. use radio propagation models to estimate distance from landmarks 2. apply lateration or angulation techniques Signature-based 1. build maps of physical space enriched with measurements 2. apply pattern matching algorithms Proximity 6
7 Lateration 7
8 Angulation The angle between two nodes can be determined by estimating the AOA parameter of a signal traveling between two nodes Phased antenna array can be employed 8
9 Phased Antenna Array Multiple antennas with known separation Each measures time of arrival of signal Given the difference in time of arrival & geometry of the receiving array, the angle from which the emission was originated can be computed If there are enough elements in the array with large separation, the angulation can be performed 9



10 Triangulation - Lateration Uses geometric properties of triangles to compute object locations Lateration: Measures distance from reference points 2-D requires 3 non-colinear points 3-D requires 4 non-coplanar points 10
11 Triangulation - Lateration Types of Measurements Direct touch, pressure Time-of-flight (e.g., sound waves travel 344m/s in 21 o C) Signal attenuation calculate based on send and receive strength attenuation varies based on environment 11
12 Time-of-Arrival Issues Requires known velocity May require high time resolution (e.g., for light or radio) A light pulse (with 299,792,458m/s) will travel the 5m in 16.7ns Time of flight of light or radio requires clocks with much higher resolution (by 6 orders of magnitude) than those used for timing ultrasound Clock synchronization Possible solution? 12
13 Some Real-life Measurements 13
14 Signal Power Decay with Distance A signal traveling from one node to another experiences fast (multipath) fading, shadowing & path loss Ideally, averaging RSS over sufficiently long time interval excludes the effects of multipath fading & shadowing general path-loss model: P(d) = P 0 10n log 10 (d/d o ) n: path loss exponent P(d): the average received power in db at distance d P 0 is the received power in db at a short distance d 0 14
15 GPS 27 satellites The orbit altitude is such that the satellites repeat the same track and configuration over any point approximately each 24 hours Powered by solar energy (also have backup batteries on board) GPS is a line-of-sight technology the receiver needs a clear view of the satellites it is using to calculate its position Each satellite has 4 rubidium atomic clocks locally averaged to maintain accuracy updated daily by a Master Control facility Satellites are precisely synchronized with each other Receiver is not synchronized with the satellite transmitter Satellites transmit their local time in the signal 16

16 Satellites Orbits 17

17 Satellites Positions and Orbits 18
18 GPS (cont d) Master Control facility monitors the satellites Computes precise orbital data (i.e., ephemeris) clock corrections for each satellite 19
19 GPS Receiver Composed of an antenna and preamplifier, radio signal microprocessor, control and display device, data recording unit, & power supply Decodes the timing signals from the 'visible' satellites (four or more) Calculates their distances, its own latitude, longitude, elevation, & time A continuous process: the position is updated on a sec-by-sec basis, output to the receiver display device and, if the receiver provides data capture capabilities, stored by the receiver-logging unit 20
20 GPS Satellite Signals As light moves through a given medium, low-frequency signals get refracted or slowed more than high-frequency signals Satellites transmit two microwave carrier signals: On L1 frequency ( MHz) it carries the navigation message (satellite orbits, clock corrections & other system parameters) & a unique identifier code On L2 frequency ( MHz) it uses to measure the ionospheric delay By comparing the delays of the two different carrier frequencies of the GPS signal L1 & L2, we can deduce what the medium is 21
21 GPS (cont d) Receivers compute their difference in time-of-arrival Receivers estimate their position (longitude, latitude, elevation) using 4 satellites 1-5m (95-99%) 22
22 GPS Error Sources Noise Satellites clock errors uncorrected by the controller (~1m) Ephemeris data errors (~1m) Troposphere delays due to weather changes e.g., temperature, pressure, humidity (~1m) Troposphere: lower part of the atmosphere, ground level to from 8-13km Ionosphere delays (~10m) Ionosphere: layer of the atmosphere that consists of ionized air (50-500km) Multipath (~0.5m) caused by reflected signals from surfaces near the receiver that can either interfere with or be mistaken for the signal that follows the straight line path from the satellite difficult to be detected and sometime hard to be avoided 23
23 GPS Error Sources (cont d) Control segment mistakes due to computer or human error (1m-100s km) Receiver errors from software or hardware failures User mistakes e.g., incorrect geodetic datum selection (1-100m) 24
24 Differential GPS (DGPS) Assumes: any two receivers that are relatively close together will experience similar atmospheric errors Requires reference station: a GPS receiver been set up on a precisely known location Reference stations calculate their position based on satellite signals and compares this location to the known location 25
25 Differential GPS (cont d) The difference is applied to GPS data recorded by the roving receiver in real time in the field using radio signals or through postprocessing after data capture using special processing software 26
26 Real-time DGPS Reference station calculates & broadcasts corrections for each satellite as it receives the data The correction is received by the roving receiver via a radio signal if the source is land based or via a satellite signal if it is satellite based and applied to the position it is calculating 27
27 Triangulation - Angulation 2D requires: 2 angles and 1 known distance Phased antenna arrays Angle 1 0 Known Length Angle 2 28
28 Statistical-based Fingerprint Grid-based representation of physical space RSSI values collected from various cells of the space Statistical fingerprints based on: Confidence intervals Percentiles Empirical distribution Theoretical distribution (e.g., Multivariate Gaussian) Training fingerprint Formed for various cells during the training phase Runtime fingerprint the unknown position Estimated position: cell whose training fingerprint has the minimum distance from the runtime one
29 Fingerprint A fingerprint can be built using various statistical properties Mean, standard deviation Percentiles Empirical distribution (entire set of signal strength values) Theoretical models (e.g., multivariate Gaussian) Fingerprint comparison depends on the statistical properties of the fingerprint Examples: Euclidean distances, Kullback-Leibler Divergence test 30
30 Training & Run-Time Signature Comparison Signal-strength measurements per A AP 1 cell AP k Training-phase fingerprint comparison Distance of that cell Run-time fingerprint University of Crete & FORTH MSWIM'10

31 Fingerprint Method: Percentiles Distance of cell c, w(c), is computed as follows: number of APs number of percentiles j th training percentile from the i th AP for cell c j th run-time percentile from the i th AP Estimated position: cell with minimum distance Top 5 weighted percentiles: weighted centroid of the 5 cells with the smallest distance
32 Fingerprint Method: Empirical Distribution Only APs that appear in both training and runtime are used Signature uses all the RSSI measurements collected per AP Distance estimation: average Kullback-Leibler Divergence (KLDs) for all APs (between training & runtime fingerprints) Select the cell with the smallest distance
33 Multivariate Gaussian Method: Main Idea Statistical-based fingerprint method Multivariate Gaussian Models for the signal strength measurements collected from different APs Exploit the 2 nd order spatial correlations between APs Perform in iterations & in multiple spatial scales (regions) Use Kullback-Leibler Divergence (KLD) for distance estimation
 Signature of a cell in runtime phase: APs from which measurements were collected at both training & runtime")
34 Multivariate Gaussian Distribution Signature of cell i in training phase: mean values of the received RSSI measurements per AP : covariance matrix (measure of spatial correlation) Signature of a cell in runtime phase: APs from which measurements were collected at both training & runtime phases

35 Multivariate Gaussian Distribution (cnt d) Mean sub-vectors and covariance sub-matrices are extracted according to Multivariate Gaussian density function: KLD between runtime and i th training cell: Estimated position: Training cell with minimum KLD
36 Multivariate Gaussian Method Apply Multivariate Gaussian Model in multiple spatial scales Physical space is divided into overlapping regions Signature of a region based on RSSI measurements collected from all APs at various positions in that region Multivariate Gaussian model applied in each region Select the region with the minimum distance In iterations: selected region also divided into sub-regions Repeat the above process in that region until the region becomes a cell
37 Kullback-Leibler divergence Information gain, relative entropy: a non-symmetric measure of the difference between two probability distributions P and Q P represents the true distribution of data, observations, or a precise calculated theoretical distribution Q represents the theory, model, description or approximation of P 38
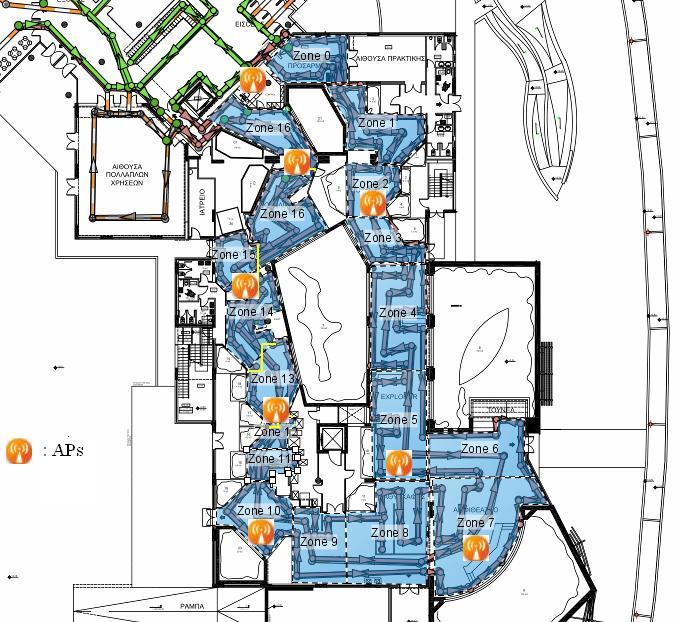
38 Example of a Fingerprint 39
39 Multivariate Gaussian Model Each cell corresponds to a Multivariate Gaussian distribution Measure the similarity of the Multivariate Gaussian distributions (MvGs) with the KLD closed form:
40 Performance Analysis of Fingerprinting Impact of various parameters Number of APs & other reference points (landmarks) Size of training set (e.g., number of measurements at various environment conditions (user populations, number of cells, cell size) Types of wireless technologies/modalities employed to form fingerprints Metrics for computing divergence/ distances Knowledge of the environment Floorplan user mobility 41
41 Empirical Results
42 Collaborative Location Sensing (CLS) Each host estimates its distance from neighboring peers refines its estimations iteratively as it receives new positioning information from peers Voting algorithm to accumulate and assesses the received positioning information Grid-representation of the terrain
43 Example of grid with accumulated votes Grid for host u Corresponds to the terrain Host u tries to position itself A cell is a possible position Peers A, B, C The value of a cell in the grid is the sum of the accumulated votes The higher the value, the more hosts it is likely position of the host
44 Multi-modal Positioning System: Cricket (1/4) Cricket beacons mounted on the ceiling and consists of: a micro-controller running at 10MHz, with 68 byres of RAM and 1024 words of program memory, lower power RF-transmitter, and single-chip RF receiver, both in 418MHz unlicensed band Ultrasonic transmitter operating at 40Hz A similar interface at the client (e.g., laptop, printer) 45
45 Cricket (2/4) A cricket beacon sends concurrently an RF message (with info about the space) & an ultrasonic pulse When the listener at a client receives the RF signal, it performs the following: 1. uses the first few bits as training information 2. turns on its ultrasonic receiver 3. listens for the ultrasonic pulse which will usually arrive a short time later 4. correlates the RF signal & ultrasonic pulse 5. determines the distance to the beacon from the time difference between the receipt of the first bit RF information & the ultrasonic pulse 46
46 Cricket (3/4) Lack of coordination can cause: RF transmissions from different cricket beacons to collide A listener may correlate incorrectly the RF data of one beacon with the ultrasonic signal of another, yielding false results Ultrasonic reception suffers from severe multi-path effect Order of magnitude longer in time than RF multi-path because of the relatively long propagation time of sound waves in air 47
47 Cricket (4/4) Handles the problem of collisions using randomization: beacon transmission times are chosen randomly with a uniform distribution within an interval the broadcasts of different beacons are statistically independent, which avoids repeated synchronization & persistent collisions Statistical analysis of correlated RF, US samples 48
48 Proximity Physical contact e.g., with pressure, touch sensors or capacitive detectors Within range of an access point Automatic ID systems computer login credit card sale RFID UPC product codes 49
49 Sensor Fusion Seeks to improve accuracy and precision by aggregating many location-sensing systems (modalities/sources) to form hierarchical & overlapping levels of resolution Robustness when a certain location-sensing system (source) becomes unavailable Issue: assign weight/importance to the different location-sensing systems 50
50 Existing Location Systems 51
51 Backup Slides 52
52 Signal-Strength Left plot: Busy period, Right plot: Quiet period (TNL s AP)
53 Multivariate Gaussian Model Fingerprint using signal-strength measurements from each AP and the interplay (covariance) of measurements from pairs of Aps Signature comparison is based on the Kullback-Leibler Divergence
54 Multivariate Gaussian Model Each cell corresponds to a Multivariate Gaussian distribution Measure the similarity of the Multivariate Gaussian distributions (MvGs) with the KLD closed form:
55 Cretaquarium
56 Empirical Results (Busy Period)
57 Empirical Results (Quiet Period)
58 Impact of the Number of APs
59 Empirical Cretaquarium
60 Collaborative Location Sensing (CLS) Each host estimates its distance from neighboring peers refines its estimations iteratively as it receives new positioning information from peers Voting algorithm to accumulate and assesses the received positioning information Grid-representation of the terrain
 x x x x Host C (negative vote) Host D votes (positive vote) positive votes from peers A, B, D negative vote from peer C Host B votes")
61 Example of voting host u Host u with unknown position Peers A, B, C, and D have positioned themselves Most likely position Host A positioned at the center of the co-centric disks Host A (positive vote) x x x x Host C (negative vote) Host D votes (positive vote) positive votes from peers A, B, D negative vote from peer C Host B votes (positive vote)

62 Example of grid with accumulated votes Grid for host u Corresponds to the terrain Host u tries to position itself A cell is a possible position Peers A, B, C The value of a cell in the grid is the sum of the accumulated votes The higher the value, the more hosts it is likely position of the host
63 Signal-Strength Left plot: Busy period, Right plot: Quiet period (TNL s AP)
64 Multivariate Gaussian Model Fingerprint using signal-strength measurements from each AP and the interplay (covariance) of measurements from pairs of Aps Signature comparison is based on the Kullback-Leibler Divergence
65 Cretaquarium
66 Empirical Cretaquarium
67 Empirical Results (Busy Period)
68 Experimental Results Quiet Period (%)

69 Splitting into areas of cells - TNL (1/2) Split the grid in 14 regions, namely from A to N The regions are overlapped Collect the data from each cell that belongs in this region Concat them in a new file named Region{A to N} 16 APs average in every region
70 Splitting into areas of cells - TNL (2/2)
71 Testbed description - Aquarium 1760 m^2 30 tanks (extra 25 will be installed) 8 APs Cell s size: 1m x 1m 5.7 APs on average were collected About 150 visitors
72 Test bed description - TNL 7 x 12 m Cell s size: 55 x 55 cm 13 APs 6 APs average detected at a cell 108 training cells 30 run-time cells
73 Experimental Results Two real map databases obtained from TNL Busy period data Quiet period data Real database obtained from Cretaquarium (Normal period data) Performance of positioning in terms of localization error. Measured by averaging the Euclidean distance between the estimated location of the mobile user and its true location

74 Signal-Strength Left plot: Busy period, Right plot: Quiet period (TNL s AP)
75 Multivariate Gaussian Model Fingerprint using signal-strength measurements from each AP and the interplay (covariance) of measurements from pairs of Aps Signature comparison is based on the Kullback-Leibler Divergence
76 Multivariate Gaussian Model Each cell corresponds to a Multivariate Gaussian distribution Measure the similarity of the Multivariate Gaussian distributions (MvGs) with the KLD closed form:
77 Cretaquarium
78 Empirical Cretaquarium
79 Empirical Results (Quiet Period)
Mobile Positioning in Wireless Mobile Networks
 Mobile Positioning in Wireless Mobile Networks Peter Brída Department of Telecommunications and Multimedia Faculty of Electrical Engineering University of Žilina SLOVAKIA Outline Why Mobile Positioning?
Mobile Positioning in Wireless Mobile Networks Peter Brída Department of Telecommunications and Multimedia Faculty of Electrical Engineering University of Žilina SLOVAKIA Outline Why Mobile Positioning?
Localization. of mobile devices. Seminar: Mobile Computing. IFW C42 Tuesday, 29th May 2001 Roger Zimmermann
 Localization of mobile devices Seminar: Mobile Computing IFW C42 Tuesday, 29th May 2001 Roger Zimmermann Overview Introduction Why Technologies Absolute Positioning Relative Positioning Selected Systems
Localization of mobile devices Seminar: Mobile Computing IFW C42 Tuesday, 29th May 2001 Roger Zimmermann Overview Introduction Why Technologies Absolute Positioning Relative Positioning Selected Systems
Cricket: Location- Support For Wireless Mobile Networks
 Cricket: Location- Support For Wireless Mobile Networks Presented By: Bill Cabral wcabral@cs.brown.edu Purpose To provide a means of localization for inbuilding, location-dependent applications Maintain
Cricket: Location- Support For Wireless Mobile Networks Presented By: Bill Cabral wcabral@cs.brown.edu Purpose To provide a means of localization for inbuilding, location-dependent applications Maintain
WLAN Location Methods
 S-7.333 Postgraduate Course in Radio Communications 7.4.004 WLAN Location Methods Heikki Laitinen heikki.laitinen@hut.fi Contents Overview of Radiolocation Radiolocation in IEEE 80.11 Signal strength based
S-7.333 Postgraduate Course in Radio Communications 7.4.004 WLAN Location Methods Heikki Laitinen heikki.laitinen@hut.fi Contents Overview of Radiolocation Radiolocation in IEEE 80.11 Signal strength based
Localization in Wireless Sensor Networks
 Localization in Wireless Sensor Networks Part 2: Localization techniques Department of Informatics University of Oslo Cyber Physical Systems, 11.10.2011 Localization problem in WSN In a localization problem
Localization in Wireless Sensor Networks Part 2: Localization techniques Department of Informatics University of Oslo Cyber Physical Systems, 11.10.2011 Localization problem in WSN In a localization problem
Indoor Positioning by the Fusion of Wireless Metrics and Sensors
 Indoor Positioning by the Fusion of Wireless Metrics and Sensors Asst. Prof. Dr. Özgür TAMER Dokuz Eylül University Electrical and Electronics Eng. Dept Indoor Positioning Indoor positioning systems (IPS)
Indoor Positioning by the Fusion of Wireless Metrics and Sensors Asst. Prof. Dr. Özgür TAMER Dokuz Eylül University Electrical and Electronics Eng. Dept Indoor Positioning Indoor positioning systems (IPS)
Final Report for AOARD Grant FA Indoor Localization and Positioning through Signal of Opportunities. Date: 14 th June 2013
 Final Report for AOARD Grant FA2386-11-1-4117 Indoor Localization and Positioning through Signal of Opportunities Date: 14 th June 2013 Name of Principal Investigators (PI and Co-PIs): Dr Law Choi Look
Final Report for AOARD Grant FA2386-11-1-4117 Indoor Localization and Positioning through Signal of Opportunities Date: 14 th June 2013 Name of Principal Investigators (PI and Co-PIs): Dr Law Choi Look
Localization in WSN. Marco Avvenuti. University of Pisa. Pervasive Computing & Networking Lab. (PerLab) Dept. of Information Engineering
 Dept. of Information Engineering") Localization in WSN Marco Avvenuti Pervasive Computing & Networking Lab. () Dept. of Information Engineering University of Pisa m.avvenuti@iet.unipi.it Introduction Location systems provide a new layer
Localization in WSN Marco Avvenuti Pervasive Computing & Networking Lab. () Dept. of Information Engineering University of Pisa m.avvenuti@iet.unipi.it Introduction Location systems provide a new layer
Chapter 9: Localization & Positioning
 hapter 9: Localization & Positioning 98/5/25 Goals of this chapter Means for a node to determine its physical position with respect to some coordinate system (5, 27) or symbolic location (in a living room)
hapter 9: Localization & Positioning 98/5/25 Goals of this chapter Means for a node to determine its physical position with respect to some coordinate system (5, 27) or symbolic location (in a living room)
Mobile Security Fall 2015
 Mobile Security Fall 2015 Patrick Tague #8: Location Services 1 Class #8 Location services for mobile phones Cellular localization WiFi localization GPS / GNSS 2 Mobile Location Mobile location has become
Mobile Security Fall 2015 Patrick Tague #8: Location Services 1 Class #8 Location services for mobile phones Cellular localization WiFi localization GPS / GNSS 2 Mobile Location Mobile location has become
Node Localization using 3D coordinates in Wireless Sensor Networks
 Node Localization using 3D coordinates in Wireless Sensor Networks Shayon Samanta Prof. Punesh U. Tembhare Prof. Charan R. Pote Computer technology Computer technology Computer technology Nagpur University
Node Localization using 3D coordinates in Wireless Sensor Networks Shayon Samanta Prof. Punesh U. Tembhare Prof. Charan R. Pote Computer technology Computer technology Computer technology Nagpur University
Ad hoc and Sensor Networks Chapter 9: Localization & positioning
 Ad hoc and Sensor Networks Chapter 9: Localization & positioning Holger Karl Computer Networks Group Universität Paderborn Goals of this chapter Means for a node to determine its physical position (with
Ad hoc and Sensor Networks Chapter 9: Localization & positioning Holger Karl Computer Networks Group Universität Paderborn Goals of this chapter Means for a node to determine its physical position (with
GPS: The Basics. Darrell R. Dean, Jr. Civil and Environmental Engineering West Virginia University. Expected Learning Outcomes for GPS
 GPS: The Basics Darrell R. Dean, Jr. Civil and Environmental Engineering West Virginia University Expected Learning Outcomes for GPS Explain the acronym GPS Name 3 important tdt dates in history of GPS
GPS: The Basics Darrell R. Dean, Jr. Civil and Environmental Engineering West Virginia University Expected Learning Outcomes for GPS Explain the acronym GPS Name 3 important tdt dates in history of GPS
One interesting embedded system
 One interesting embedded system Intel Vaunt small glass Key: AR over devices that look normal https://www.youtube.com/watch?v=bnfwclghef More details at: https://www.theverge.com/8//5/696653/intelvaunt-smart-glasses-announced-ar-video
One interesting embedded system Intel Vaunt small glass Key: AR over devices that look normal https://www.youtube.com/watch?v=bnfwclghef More details at: https://www.theverge.com/8//5/696653/intelvaunt-smart-glasses-announced-ar-video
GPS and Recent Alternatives for Localisation. Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney
 GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
PRINCIPLES AND FUNCTIONING OF GPS/ DGPS /ETS ER A. K. ATABUDHI, ORSAC
 PRINCIPLES AND FUNCTIONING OF GPS/ DGPS /ETS ER A. K. ATABUDHI, ORSAC GPS GPS, which stands for Global Positioning System, is the only system today able to show you your exact position on the Earth anytime,
PRINCIPLES AND FUNCTIONING OF GPS/ DGPS /ETS ER A. K. ATABUDHI, ORSAC GPS GPS, which stands for Global Positioning System, is the only system today able to show you your exact position on the Earth anytime,
Abderrahim Benslimane, Professor of Computer Sciences Coordinator of the Faculty of Engineering Head of the Informatic Research Center (CRI)
") Wireless Sensor Networks for Smart Environments: A Focus on the Localization Abderrahim Benslimane, Professor of Computer Sciences Coordinator of the Faculty of Engineering Head of the Informatic Research
Wireless Sensor Networks for Smart Environments: A Focus on the Localization Abderrahim Benslimane, Professor of Computer Sciences Coordinator of the Faculty of Engineering Head of the Informatic Research
Introduction. Introduction ROBUST SENSOR POSITIONING IN WIRELESS AD HOC SENSOR NETWORKS. Smart Wireless Sensor Systems 1
 ROBUST SENSOR POSITIONING IN WIRELESS AD HOC SENSOR NETWORKS Xiang Ji and Hongyuan Zha Material taken from Sensor Network Operations by Shashi Phoa, Thomas La Porta and Christopher Griffin, John Wiley,
ROBUST SENSOR POSITIONING IN WIRELESS AD HOC SENSOR NETWORKS Xiang Ji and Hongyuan Zha Material taken from Sensor Network Operations by Shashi Phoa, Thomas La Porta and Christopher Griffin, John Wiley,
The Cricket Indoor Location System
 The Cricket Indoor Location System Hari Balakrishnan Cricket Project MIT Computer Science and Artificial Intelligence Lab http://nms.csail.mit.edu/~hari http://cricket.csail.mit.edu Joint work with Bodhi
The Cricket Indoor Location System Hari Balakrishnan Cricket Project MIT Computer Science and Artificial Intelligence Lab http://nms.csail.mit.edu/~hari http://cricket.csail.mit.edu Joint work with Bodhi
ESTIMATION OF IONOSPHERIC DELAY FOR SINGLE AND DUAL FREQUENCY GPS RECEIVERS: A COMPARISON
 ESTMATON OF ONOSPHERC DELAY FOR SNGLE AND DUAL FREQUENCY GPS RECEVERS: A COMPARSON K. Durga Rao, Dr. V B S Srilatha ndira Dutt Dept. of ECE, GTAM UNVERSTY Abstract: Global Positioning System is the emerging
ESTMATON OF ONOSPHERC DELAY FOR SNGLE AND DUAL FREQUENCY GPS RECEVERS: A COMPARSON K. Durga Rao, Dr. V B S Srilatha ndira Dutt Dept. of ECE, GTAM UNVERSTY Abstract: Global Positioning System is the emerging
Channel Modeling ETIN10. Wireless Positioning
 Channel Modeling ETIN10 Lecture no: 10 Wireless Positioning Fredrik Tufvesson Department of Electrical and Information Technology 2014-03-03 Fredrik Tufvesson - ETIN10 1 Overview Motivation: why wireless
Channel Modeling ETIN10 Lecture no: 10 Wireless Positioning Fredrik Tufvesson Department of Electrical and Information Technology 2014-03-03 Fredrik Tufvesson - ETIN10 1 Overview Motivation: why wireless
MOBILE COMPUTING 1/28/18. Location, Location, Location. Overview. CSE 40814/60814 Spring 2018
 MOBILE COMPUTING CSE 40814/60814 Spring 018 Location, Location, Location Location information adds context to activity: location of sensed events in the physical world location-aware services location
MOBILE COMPUTING CSE 40814/60814 Spring 018 Location, Location, Location Location information adds context to activity: location of sensed events in the physical world location-aware services location
Project = An Adventure : Wireless Networks. Lecture 4: More Physical Layer. What is an Antenna? Outline. Page 1
 Project = An Adventure 18-759: Wireless Networks Checkpoint 2 Checkpoint 1 Lecture 4: More Physical Layer You are here Done! Peter Steenkiste Departments of Computer Science and Electrical and Computer
Project = An Adventure 18-759: Wireless Networks Checkpoint 2 Checkpoint 1 Lecture 4: More Physical Layer You are here Done! Peter Steenkiste Departments of Computer Science and Electrical and Computer
Introduction to GNSS Base-Station
 Introduction to GNSS Base-Station Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 Introduction GPS or GNSS observation
Introduction to GNSS Base-Station Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 Introduction GPS or GNSS observation
Wireless Localization Techniques CS441
 Wireless Localization Techniques CS441 Variety of Applications Two applications: Passive habitat monitoring: Where is the bird? What kind of bird is it? Asset tracking: Where is the projector? Why is it
Wireless Localization Techniques CS441 Variety of Applications Two applications: Passive habitat monitoring: Where is the bird? What kind of bird is it? Asset tracking: Where is the projector? Why is it
The Global Positioning System
 The Global Positioning System 5-1 US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites
The Global Positioning System 5-1 US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites
GPS Milestones, cont. GPS Milestones. The Global Positioning Sytem, Part 1 10/10/2017. M. Helper, GEO 327G/386G, UT Austin 1. US GPS Facts of Note
 The Global Positioning System US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites (SVs)
The Global Positioning System US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites (SVs)
NR402 GIS Applications in Natural Resources
 NR402 GIS Applications in Natural Resources Lesson 5 GPS/GIS integration Global Positioning System (GPS)..a global navigation system that everyone can use What is GPS? How does it work? How accurate is
NR402 GIS Applications in Natural Resources Lesson 5 GPS/GIS integration Global Positioning System (GPS)..a global navigation system that everyone can use What is GPS? How does it work? How accurate is
GPS Global Positioning System
 GPS Global Positioning System 10.04.2012 1 Agenda What is GPS? Basic consept History GPS receivers How they work Comunication Message format Satellite frequencies Sources of GPS signal errors 10.04.2012
GPS Global Positioning System 10.04.2012 1 Agenda What is GPS? Basic consept History GPS receivers How they work Comunication Message format Satellite frequencies Sources of GPS signal errors 10.04.2012
FieldGenius Technical Notes GPS Terminology
 FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
Mitigate Effects of Multipath Interference at GPS Using Separate Antennas
 Mitigate Effects of Multipath Interference at GPS Using Separate Antennas Younis H. Karim AlJewari #1, R. Badlishah Ahmed *2, Ali Amer Ahmed #3 # School of Computer and Communication Engineering, Universiti
Mitigate Effects of Multipath Interference at GPS Using Separate Antennas Younis H. Karim AlJewari #1, R. Badlishah Ahmed *2, Ali Amer Ahmed #3 # School of Computer and Communication Engineering, Universiti
Introduction to Geographic Information Science. Last Lecture. Today s Outline. Geography 4103 / GNSS/GPS Technology
 Geography 4103 / 5103 Introduction to Geographic Information Science GNSS/GPS Technology Last Lecture Geoids Ellipsoid Datum Projection Basics Today s Outline GNSS technology How satellite based navigation
Geography 4103 / 5103 Introduction to Geographic Information Science GNSS/GPS Technology Last Lecture Geoids Ellipsoid Datum Projection Basics Today s Outline GNSS technology How satellite based navigation
PinPoint Localizing Interfering Radios
 PinPoint Localizing Interfering Radios Kiran Joshi, Steven Hong, Sachin Katti Stanford University April 4, 2012 1 Interference Degrades Wireless Network Performance AP1 AP3 AP2 Network Interference AP4
PinPoint Localizing Interfering Radios Kiran Joshi, Steven Hong, Sachin Katti Stanford University April 4, 2012 1 Interference Degrades Wireless Network Performance AP1 AP3 AP2 Network Interference AP4
LOCALIZATION WITH GPS UNAVAILABLE
 LOCALIZATION WITH GPS UNAVAILABLE ARES SWIEE MEETING - ROME, SEPT. 26 2014 TOR VERGATA UNIVERSITY Summary Introduction Technology State of art Application Scenarios vs. Technology Advanced Research in
LOCALIZATION WITH GPS UNAVAILABLE ARES SWIEE MEETING - ROME, SEPT. 26 2014 TOR VERGATA UNIVERSITY Summary Introduction Technology State of art Application Scenarios vs. Technology Advanced Research in
What is a GPS How does GPS work? GPS Segments GPS P osition Position Position Accuracy Accuracy Accuracy GPS A pplications Applications Applications
 What is GPS? What is a GPS How does GPS work? GPS Segments GPS Position Accuracy GPS Applications What is GPS? The Global Positioning System (GPS) is a precise worldwide radio-navigation system, and consists
What is GPS? What is a GPS How does GPS work? GPS Segments GPS Position Accuracy GPS Applications What is GPS? The Global Positioning System (GPS) is a precise worldwide radio-navigation system, and consists
36. Global Positioning System
 36. Introduction to the Global Positioning System (GPS) Why do we need GPS? Position: a basic need safe sea travel, crowed skies, resource management, legal questions Positioning: a challenging job local
36. Introduction to the Global Positioning System (GPS) Why do we need GPS? Position: a basic need safe sea travel, crowed skies, resource management, legal questions Positioning: a challenging job local
Indoor Localization in Wireless Sensor Networks
 International Journal of Engineering Inventions e-issn: 2278-7461, p-issn: 2319-6491 Volume 4, Issue 03 (August 2014) PP: 39-44 Indoor Localization in Wireless Sensor Networks Farhat M. A. Zargoun 1, Nesreen
International Journal of Engineering Inventions e-issn: 2278-7461, p-issn: 2319-6491 Volume 4, Issue 03 (August 2014) PP: 39-44 Indoor Localization in Wireless Sensor Networks Farhat M. A. Zargoun 1, Nesreen
Locali ation z For For Wireless S ensor Sensor Networks Univ of Alabama F, all Fall
 Localization ation For Wireless Sensor Networks Univ of Alabama, Fall 2011 1 Introduction - Wireless Sensor Network Power Management WSN Challenges Positioning of Sensors and Events (Localization) Coverage
Localization ation For Wireless Sensor Networks Univ of Alabama, Fall 2011 1 Introduction - Wireless Sensor Network Power Management WSN Challenges Positioning of Sensors and Events (Localization) Coverage
GPS Technical Overview N5TWP NOV08. How Can GPS Mislead
 GPS Technical Overview How Can GPS Mislead 1 Objectives Components of GPS Satellite Acquisition Process Position Determination How can GPS Mislead 2 Components of GPS Control Segment Series of monitoring
GPS Technical Overview How Can GPS Mislead 1 Objectives Components of GPS Satellite Acquisition Process Position Determination How can GPS Mislead 2 Components of GPS Control Segment Series of monitoring
Session2 Antennas and Propagation
 Wireless Communication Presented by Dr. Mahmoud Daneshvar Session2 Antennas and Propagation 1. Introduction Types of Anttenas Free space Propagation 2. Propagation modes 3. Transmission Problems 4. Fading
Wireless Communication Presented by Dr. Mahmoud Daneshvar Session2 Antennas and Propagation 1. Introduction Types of Anttenas Free space Propagation 2. Propagation modes 3. Transmission Problems 4. Fading
Unguided Transmission Media
 CS311 Data Communication Unguided Transmission Media by Dr. Manas Khatua Assistant Professor Dept. of CSE IIT Jodhpur E-mail: manaskhatua@iitj.ac.in Web: http://home.iitj.ac.in/~manaskhatua http://manaskhatua.github.io/
CS311 Data Communication Unguided Transmission Media by Dr. Manas Khatua Assistant Professor Dept. of CSE IIT Jodhpur E-mail: manaskhatua@iitj.ac.in Web: http://home.iitj.ac.in/~manaskhatua http://manaskhatua.github.io/
Primer on GPS Operations
 MP Rugged Wireless Modem Primer on GPS Operations 2130313 Rev 1.0 Cover illustration by Emma Jantz-Lee (age 11). An Introduction to GPS This primer is intended to provide the foundation for understanding
MP Rugged Wireless Modem Primer on GPS Operations 2130313 Rev 1.0 Cover illustration by Emma Jantz-Lee (age 11). An Introduction to GPS This primer is intended to provide the foundation for understanding
Digital Land Surveying and Mapping (DLS and M) Dr. Jayanta Kumar Ghosh Department of Civil Engineering Indian Institute of Technology, Roorkee
 Dr. Jayanta Kumar Ghosh Department of Civil Engineering Indian Institute of Technology, Roorkee") Digital Land Surveying and Mapping (DLS and M) Dr. Jayanta Kumar Ghosh Department of Civil Engineering Indian Institute of Technology, Roorkee Lecture 11 Errors in GPS Observables Welcome students. Lesson
Digital Land Surveying and Mapping (DLS and M) Dr. Jayanta Kumar Ghosh Department of Civil Engineering Indian Institute of Technology, Roorkee Lecture 11 Errors in GPS Observables Welcome students. Lesson
Digital Surveillance Devices?
 Technology Framework Tracking Technologies Don Mason Associate Director Digital Surveillance Devices? Digital Surveillance Devices? Secure Continuous Remote Alcohol Monitor SCRAM Page 1 Location Tracking
Technology Framework Tracking Technologies Don Mason Associate Director Digital Surveillance Devices? Digital Surveillance Devices? Secure Continuous Remote Alcohol Monitor SCRAM Page 1 Location Tracking
Detecting Intra-Room Mobility with Signal Strength Descriptors
 Detecting Intra-Room Mobility with Signal Strength Descriptors Authors: Konstantinos Kleisouris Bernhard Firner Richard Howard Yanyong Zhang Richard Martin WINLAB Background: Internet of Things (Iot) Attaching
Detecting Intra-Room Mobility with Signal Strength Descriptors Authors: Konstantinos Kleisouris Bernhard Firner Richard Howard Yanyong Zhang Richard Martin WINLAB Background: Internet of Things (Iot) Attaching
Antennas and Propagation. Chapter 5
 Antennas and Propagation Chapter 5 Introduction An antenna is an electrical conductor or system of conductors Transmission - radiates electromagnetic energy into space Reception - collects electromagnetic
Antennas and Propagation Chapter 5 Introduction An antenna is an electrical conductor or system of conductors Transmission - radiates electromagnetic energy into space Reception - collects electromagnetic
Global Positioning Systems (GPS) Trails: the achilles heel of mapping from the air / satellites
 Trails: the achilles heel of mapping from the air / satellites") Global Positioning Systems (GPS) Trails: the achilles heel of mapping from the air / satellites Google maps updated regularly by local users using GPS Also: http://openstreetmaps.org GPS applications
Global Positioning Systems (GPS) Trails: the achilles heel of mapping from the air / satellites Google maps updated regularly by local users using GPS Also: http://openstreetmaps.org GPS applications
Modelling GPS Observables for Time Transfer
 Modelling GPS Observables for Time Transfer Marek Ziebart Department of Geomatic Engineering University College London Presentation structure Overview of GPS Time frames in GPS Introduction to GPS observables
Modelling GPS Observables for Time Transfer Marek Ziebart Department of Geomatic Engineering University College London Presentation structure Overview of GPS Time frames in GPS Introduction to GPS observables
Digital surveillance devices?
 Technology Framework Tracking Technologies Don Mason Associate Director Copyright 2011 National Center for Justice and the Rule of Law All Rights Reserved Digital surveillance devices? Digital surveillance
Technology Framework Tracking Technologies Don Mason Associate Director Copyright 2011 National Center for Justice and the Rule of Law All Rights Reserved Digital surveillance devices? Digital surveillance
Table of Contents. Frequently Used Abbreviation... xvii
 GPS Satellite Surveying, 2 nd Edition Alfred Leick Department of Surveying Engineering, University of Maine John Wiley & Sons, Inc. 1995 (Navtech order #1028) Table of Contents Preface... xiii Frequently
GPS Satellite Surveying, 2 nd Edition Alfred Leick Department of Surveying Engineering, University of Maine John Wiley & Sons, Inc. 1995 (Navtech order #1028) Table of Contents Preface... xiii Frequently
Global Positioning System: what it is and how we use it for measuring the earth s movement. May 5, 2009
 Global Positioning System: what it is and how we use it for measuring the earth s movement. May 5, 2009 References Lectures from K. Larson s Introduction to GNSS http://www.colorado.edu/engineering/asen/
Global Positioning System: what it is and how we use it for measuring the earth s movement. May 5, 2009 References Lectures from K. Larson s Introduction to GNSS http://www.colorado.edu/engineering/asen/
Carrier Independent Localization Techniques for GSM Terminals
 Carrier Independent Localization Techniques for GSM Terminals V. Loscrí, E. Natalizio and E. Viterbo DEIS University of Calabria - Cosenza, Italy Email: {vloscri,enatalizio,viterbo}@deis.unical.it D. Mauro,
Carrier Independent Localization Techniques for GSM Terminals V. Loscrí, E. Natalizio and E. Viterbo DEIS University of Calabria - Cosenza, Italy Email: {vloscri,enatalizio,viterbo}@deis.unical.it D. Mauro,
IoT Wi-Fi- based Indoor Positioning System Using Smartphones
 IoT Wi-Fi- based Indoor Positioning System Using Smartphones Author: Suyash Gupta Abstract The demand for Indoor Location Based Services (LBS) is increasing over the past years as smartphone market expands.
IoT Wi-Fi- based Indoor Positioning System Using Smartphones Author: Suyash Gupta Abstract The demand for Indoor Location Based Services (LBS) is increasing over the past years as smartphone market expands.
Global Navigation Satellite Systems II
 Global Navigation Satellite Systems II AERO4701 Space Engineering 3 Week 4 Last Week Examined the problem of satellite coverage and constellation design Looked at the GPS satellite constellation Overview
Global Navigation Satellite Systems II AERO4701 Space Engineering 3 Week 4 Last Week Examined the problem of satellite coverage and constellation design Looked at the GPS satellite constellation Overview
EITN85, FREDRIK TUFVESSON, JOHAN KÅREDAL ELECTRICAL AND INFORMATION TECHNOLOGY. Why do we need UWB channel models?
 Wireless Communication Channels Lecture 9:UWB Channel Modeling EITN85, FREDRIK TUFVESSON, JOHAN KÅREDAL ELECTRICAL AND INFORMATION TECHNOLOGY Overview What is Ultra-Wideband (UWB)? Why do we need UWB channel
Wireless Communication Channels Lecture 9:UWB Channel Modeling EITN85, FREDRIK TUFVESSON, JOHAN KÅREDAL ELECTRICAL AND INFORMATION TECHNOLOGY Overview What is Ultra-Wideband (UWB)? Why do we need UWB channel
Global Correction Services for GNSS
 Global Correction Services for GNSS Hemisphere GNSS Whitepaper September 5, 2015 Overview Since the early days of GPS, new industries emerged while existing industries evolved to use position data in real-time.
Global Correction Services for GNSS Hemisphere GNSS Whitepaper September 5, 2015 Overview Since the early days of GPS, new industries emerged while existing industries evolved to use position data in real-time.
Estimation of speed, average received power and received signal in wireless systems using wavelets
 Estimation of speed, average received power and received signal in wireless systems using wavelets Rajat Bansal Sumit Laad Group Members rajat@ee.iitb.ac.in laad@ee.iitb.ac.in 01D07010 01D07011 Abstract
Estimation of speed, average received power and received signal in wireless systems using wavelets Rajat Bansal Sumit Laad Group Members rajat@ee.iitb.ac.in laad@ee.iitb.ac.in 01D07010 01D07011 Abstract
Antennas & Propagation. CSG 250 Fall 2007 Rajmohan Rajaraman
 Antennas & Propagation CSG 250 Fall 2007 Rajmohan Rajaraman Introduction An antenna is an electrical conductor or system of conductors o Transmission - radiates electromagnetic energy into space o Reception
Antennas & Propagation CSG 250 Fall 2007 Rajmohan Rajaraman Introduction An antenna is an electrical conductor or system of conductors o Transmission - radiates electromagnetic energy into space o Reception
Antennas and Propagation
 Antennas and Propagation Chapter 5 Introduction An antenna is an electrical conductor or system of conductors Transmission - radiates electromagnetic energy into space Reception - collects electromagnetic
Antennas and Propagation Chapter 5 Introduction An antenna is an electrical conductor or system of conductors Transmission - radiates electromagnetic energy into space Reception - collects electromagnetic
Clock Synchronization of Pseudolite Using Time Transfer Technique Based on GPS Code Measurement
 , pp.35-40 http://dx.doi.org/10.14257/ijseia.2014.8.4.04 Clock Synchronization of Pseudolite Using Time Transfer Technique Based on GPS Code Measurement Soyoung Hwang and Donghui Yu* Department of Multimedia
, pp.35-40 http://dx.doi.org/10.14257/ijseia.2014.8.4.04 Clock Synchronization of Pseudolite Using Time Transfer Technique Based on GPS Code Measurement Soyoung Hwang and Donghui Yu* Department of Multimedia
Global Navigation Satellite Systems (GNSS)Part I EE 570: Location and Navigation
Part I EE 570: Location and Navigation") Lecture Global Navigation Satellite Systems (GNSS)Part I EE 570: Location and Navigation Lecture Notes Update on April 25, 2016 Aly El-Osery and Kevin Wedeward, Electrical Engineering Dept., New Mexico
Lecture Global Navigation Satellite Systems (GNSS)Part I EE 570: Location and Navigation Lecture Notes Update on April 25, 2016 Aly El-Osery and Kevin Wedeward, Electrical Engineering Dept., New Mexico
Worst-Case GPS Constellation for Testing Navigation at Geosynchronous Orbit for GOES-R
 Worst-Case GPS Constellation for Testing Navigation at Geosynchronous Orbit for GOES-R Kristin Larson, Dave Gaylor, and Stephen Winkler Emergent Space Technologies and Lockheed Martin Space Systems 36
Worst-Case GPS Constellation for Testing Navigation at Geosynchronous Orbit for GOES-R Kristin Larson, Dave Gaylor, and Stephen Winkler Emergent Space Technologies and Lockheed Martin Space Systems 36
A Practical Approach to Landmark Deployment for Indoor Localization
 A Practical Approach to Landmark Deployment for Indoor Localization Yingying Chen, John-Austen Francisco, Wade Trappe, and Richard P. Martin Dept. of Computer Science Wireless Information Network Laboratory
A Practical Approach to Landmark Deployment for Indoor Localization Yingying Chen, John-Austen Francisco, Wade Trappe, and Richard P. Martin Dept. of Computer Science Wireless Information Network Laboratory
Lecture 8: GIS Data Error & GPS Technology
 Lecture 8: GIS Data Error & GPS Technology A. Introduction We have spent the beginning of this class discussing some basic information regarding GIS technology. Now that you have a grasp of the basic terminology
Lecture 8: GIS Data Error & GPS Technology A. Introduction We have spent the beginning of this class discussing some basic information regarding GIS technology. Now that you have a grasp of the basic terminology
Chapter 1. Node Localization in Wireless Sensor Networks
 Chapter 1 Node Localization in Wireless Sensor Networks Ziguo Zhong, Jaehoon Jeong, Ting Zhu, Shuo Guo and Tian He Department of Computer Science and Engineering The University of Minnesota 200 Union Street
Chapter 1 Node Localization in Wireless Sensor Networks Ziguo Zhong, Jaehoon Jeong, Ting Zhu, Shuo Guo and Tian He Department of Computer Science and Engineering The University of Minnesota 200 Union Street
Prototype Software-based Receiver for Remote Sensing using Reflected GPS Signals. Dinesh Manandhar The University of Tokyo
 Prototype Software-based Receiver for Remote Sensing using Reflected GPS Signals Dinesh Manandhar The University of Tokyo dinesh@qzss.org 1 Contents Background Remote Sensing Capability System Architecture
Prototype Software-based Receiver for Remote Sensing using Reflected GPS Signals Dinesh Manandhar The University of Tokyo dinesh@qzss.org 1 Contents Background Remote Sensing Capability System Architecture
Chapter 1: Telecommunication Fundamentals
 Chapter 1: Telecommunication Fundamentals Block Diagram of a communication system Noise n(t) m(t) Information (base-band signal) Signal Processing Carrier Circuits s(t) Transmission Medium r(t) Signal
Chapter 1: Telecommunication Fundamentals Block Diagram of a communication system Noise n(t) m(t) Information (base-band signal) Signal Processing Carrier Circuits s(t) Transmission Medium r(t) Signal
Antennas and Propagation
 Mobile Networks Module D-1 Antennas and Propagation 1. Introduction 2. Propagation modes 3. Line-of-sight transmission 4. Fading Slides adapted from Stallings, Wireless Communications & Networks, Second
Mobile Networks Module D-1 Antennas and Propagation 1. Introduction 2. Propagation modes 3. Line-of-sight transmission 4. Fading Slides adapted from Stallings, Wireless Communications & Networks, Second
IOT GEOLOCATION NEW TECHNICAL AND ECONOMICAL OPPORTUNITIES
 IOT GEOLOCATION NEW TECHNICAL AND ECONOMICAL OPPORTUNITIES Florian LECLERE f.leclere@kerlink.fr EOT Conference Herning 2017 November 1st, 2017 AGENDA 1 NEW IOT PLATFORM LoRa LPWAN Platform Geolocation
IOT GEOLOCATION NEW TECHNICAL AND ECONOMICAL OPPORTUNITIES Florian LECLERE f.leclere@kerlink.fr EOT Conference Herning 2017 November 1st, 2017 AGENDA 1 NEW IOT PLATFORM LoRa LPWAN Platform Geolocation
Effects of magnetic storms on GPS signals
 Effects of magnetic storms on GPS signals Andreja Sušnik Supervisor: doc.dr. Biagio Forte Outline 1. Background - GPS system - Ionosphere 2. Ionospheric Scintillations 3. Experimental data 4. Conclusions
Effects of magnetic storms on GPS signals Andreja Sušnik Supervisor: doc.dr. Biagio Forte Outline 1. Background - GPS system - Ionosphere 2. Ionospheric Scintillations 3. Experimental data 4. Conclusions
Antennas and Propagation. Chapter 5
 Antennas and Propagation Chapter 5 Introduction An antenna is an electrical conductor or system of conductors Transmission - radiates electromagnetic energy into space Reception - collects electromagnetic
Antennas and Propagation Chapter 5 Introduction An antenna is an electrical conductor or system of conductors Transmission - radiates electromagnetic energy into space Reception - collects electromagnetic
Experimental Characterization of a Large Aperture Array Localization Technique using an SDR Testbench
 Experimental Characterization of a Large Aperture Array Localization Technique using an SDR Testbench M. Willerton, D. Yates, V. Goverdovsky and C. Papavassiliou Imperial College London, UK. 30 th November
Experimental Characterization of a Large Aperture Array Localization Technique using an SDR Testbench M. Willerton, D. Yates, V. Goverdovsky and C. Papavassiliou Imperial College London, UK. 30 th November
Non-Line-Of-Sight Environment based Localization in Wireless Sensor Networks
 Non-Line-Of-Sight Environment based Localization in Wireless Sensor Networks Divya.R PG Scholar, Electronics and communication Engineering, Pondicherry Engineering College, Puducherry, India Gunasundari.R
Non-Line-Of-Sight Environment based Localization in Wireless Sensor Networks Divya.R PG Scholar, Electronics and communication Engineering, Pondicherry Engineering College, Puducherry, India Gunasundari.R
Smart Antenna Techniques and Their Application to Wireless Ad Hoc Networks. Plenary Talk at: Jack H. Winters. September 13, 2005
 Smart Antenna Techniques and Their Application to Wireless Ad Hoc Networks Plenary Talk at: Jack H. Winters September 13, 2005 jwinters@motia.com 12/05/03 Slide 1 1 Outline Service Limitations Smart Antennas
Smart Antenna Techniques and Their Application to Wireless Ad Hoc Networks Plenary Talk at: Jack H. Winters September 13, 2005 jwinters@motia.com 12/05/03 Slide 1 1 Outline Service Limitations Smart Antennas
An Experiment Study for Time Synchronization Utilizing USRP and GNU Radio
 GNU Radio Conference 2017, September 11-15th, San Diego, USA An Experiment Study for Time Synchronization Utilizing USRP and GNU Radio Won Jae Yoo, Kwang Ho Choi, JoonHoo Lim, La Woo Kim, Hyoungmin So
GNU Radio Conference 2017, September 11-15th, San Diego, USA An Experiment Study for Time Synchronization Utilizing USRP and GNU Radio Won Jae Yoo, Kwang Ho Choi, JoonHoo Lim, La Woo Kim, Hyoungmin So
Indoor Positioning Systems WLAN Positioning
 Praktikum Mobile und Verteilte Systeme Indoor Positioning Systems WLAN Positioning Prof. Dr. Claudia Linnhoff-Popien Florian Dorfmeister, Chadly Marouane, Kevin Wiesner http://www.mobile.ifi.lmu.de Sommersemester
Praktikum Mobile und Verteilte Systeme Indoor Positioning Systems WLAN Positioning Prof. Dr. Claudia Linnhoff-Popien Florian Dorfmeister, Chadly Marouane, Kevin Wiesner http://www.mobile.ifi.lmu.de Sommersemester
Location Discovery in Sensor Network
 Location Discovery in Sensor Network Pin Nie Telecommunications Software and Multimedia Laboratory Helsinki University of Technology niepin@cc.hut.fi Abstract One established trend in electronics is micromation.
Location Discovery in Sensor Network Pin Nie Telecommunications Software and Multimedia Laboratory Helsinki University of Technology niepin@cc.hut.fi Abstract One established trend in electronics is micromation.
Range Sensing strategies
 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
GPS Timing and Synchronization: Characterization and Spatial Correlation. 8/11/2017 Rob Halliday High Energy Astrophysics Group, CWRU
 GPS Timing and Synchronization: Characterization and Spatial Correlation 8/11/2017 Rob Halliday High Energy Astrophysics Group, CWRU GPS Basics GPS Constellation: 30+ Satellites, orbiting earth at 26.6Mm,
GPS Timing and Synchronization: Characterization and Spatial Correlation 8/11/2017 Rob Halliday High Energy Astrophysics Group, CWRU GPS Basics GPS Constellation: 30+ Satellites, orbiting earth at 26.6Mm,
Wireless Networked Systems
 Wireless Networked Systems CS 795/895 - Spring 2013 Lec #4: Medium Access Control Power/CarrierSense Control, Multi-Channel, Directional Antenna Tamer Nadeem Dept. of Computer Science Power & Carrier Sense
Wireless Networked Systems CS 795/895 - Spring 2013 Lec #4: Medium Access Control Power/CarrierSense Control, Multi-Channel, Directional Antenna Tamer Nadeem Dept. of Computer Science Power & Carrier Sense
Indoor Localization Alessandro Redondi
 Indoor Localization Alessandro Redondi Introduction Indoor localization in wireless networks Ranging and trilateration Practical example using python 2 Localization Process to determine the physical location
Indoor Localization Alessandro Redondi Introduction Indoor localization in wireless networks Ranging and trilateration Practical example using python 2 Localization Process to determine the physical location
al T TD ) ime D Faamily Products The RTD Family of products offers a full suite of highprecision GPS sensor positioning and navigation solutions for:
 ime D Faamily Products The RTD Family of products offers a full suite of highprecision GPS sensor positioning and navigation solutions for:") Reeal ynnamics al T amics (R TD ) ime D RTD) Time Dy Faamily mily ooff P roducts Products The RTD Family of products offers a full suite of highprecision GPS sensor positioning and navigation solutions
Reeal ynnamics al T amics (R TD ) ime D RTD) Time Dy Faamily mily ooff P roducts Products The RTD Family of products offers a full suite of highprecision GPS sensor positioning and navigation solutions
Robust Positioning for Urban Traffic
 Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Antennas and Propagation
 CMPE 477 Wireless and Mobile Networks Lecture 3: Antennas and Propagation Antennas Propagation Modes Line of Sight Transmission Fading in the Mobile Environment Introduction An antenna is an electrical
CMPE 477 Wireless and Mobile Networks Lecture 3: Antennas and Propagation Antennas Propagation Modes Line of Sight Transmission Fading in the Mobile Environment Introduction An antenna is an electrical
UWB Channel Modeling
 Channel Modeling ETIN10 Lecture no: 9 UWB Channel Modeling Fredrik Tufvesson & Johan Kåredal, Department of Electrical and Information Technology fredrik.tufvesson@eit.lth.se 2011-02-21 Fredrik Tufvesson
Channel Modeling ETIN10 Lecture no: 9 UWB Channel Modeling Fredrik Tufvesson & Johan Kåredal, Department of Electrical and Information Technology fredrik.tufvesson@eit.lth.se 2011-02-21 Fredrik Tufvesson
Wireless Intro : Computer Networking. Wireless Challenges. Overview
 Wireless Intro 15-744: Computer Networking L-17 Wireless Overview TCP on wireless links Wireless MAC Assigned reading [BM09] In Defense of Wireless Carrier Sense [BAB+05] Roofnet (2 sections) Optional
Wireless Intro 15-744: Computer Networking L-17 Wireless Overview TCP on wireless links Wireless MAC Assigned reading [BM09] In Defense of Wireless Carrier Sense [BAB+05] Roofnet (2 sections) Optional
RECOMMENDATION ITU-R BS
 Rec. ITU-R BS.1350-1 1 RECOMMENDATION ITU-R BS.1350-1 SYSTEMS REQUIREMENTS FOR MULTIPLEXING (FM) SOUND BROADCASTING WITH A SUB-CARRIER DATA CHANNEL HAVING A RELATIVELY LARGE TRANSMISSION CAPACITY FOR STATIONARY
Rec. ITU-R BS.1350-1 1 RECOMMENDATION ITU-R BS.1350-1 SYSTEMS REQUIREMENTS FOR MULTIPLEXING (FM) SOUND BROADCASTING WITH A SUB-CARRIER DATA CHANNEL HAVING A RELATIVELY LARGE TRANSMISSION CAPACITY FOR STATIONARY
Line and polygon features can be created via on-screen digitizing.
 This module explains how GPS works, sources of error, and error correction using real time or post processing differential correction. Cost and accuracy of different grades of GPS units are also part of
This module explains how GPS works, sources of error, and error correction using real time or post processing differential correction. Cost and accuracy of different grades of GPS units are also part of
Location in Ubiquitous Computing
 Chapter 7 Location in Ubiquitous Computing Alex Varshavsky and Shwetak Patel Contents 7.1 Introduction 286 7.2 Characterizing Location Technologies 288 7.2.1 Location Representation 288 7.2.2 Infrastructure
Chapter 7 Location in Ubiquitous Computing Alex Varshavsky and Shwetak Patel Contents 7.1 Introduction 286 7.2 Characterizing Location Technologies 288 7.2.1 Location Representation 288 7.2.2 Infrastructure
Application Note 37. Emulating RF Channel Characteristics
 Application Note 37 Emulating RF Channel Characteristics Wireless communication is one of the most demanding applications for the telecommunications equipment designer. Typical signals at the receiver
Application Note 37 Emulating RF Channel Characteristics Wireless communication is one of the most demanding applications for the telecommunications equipment designer. Typical signals at the receiver
GPS data correction using encoders and INS sensors
 GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
Channel Modeling ETI 085
 Channel Modeling ETI 085 Overview Lecture no: 9 What is Ultra-Wideband (UWB)? Why do we need UWB channel models? UWB Channel Modeling UWB channel modeling Standardized UWB channel models Fredrik Tufvesson
Channel Modeling ETI 085 Overview Lecture no: 9 What is Ultra-Wideband (UWB)? Why do we need UWB channel models? UWB Channel Modeling UWB channel modeling Standardized UWB channel models Fredrik Tufvesson
GPS-free Geolocation using LoRa in Low-Power WANs. Bernat Carbonés Fargas, Martin Nordal Petersen 08/06/2017
 GPS-free Geolocation using LoRa in Low-Power WANs Bernat Carbonés Fargas, Martin Nordal Petersen 08/06/2017 Outline 1. Introduction 2. LoRaWAN for geolocation 3. System design 4. Multilateration in LoRaWAN
GPS-free Geolocation using LoRa in Low-Power WANs Bernat Carbonés Fargas, Martin Nordal Petersen 08/06/2017 Outline 1. Introduction 2. LoRaWAN for geolocation 3. System design 4. Multilateration in LoRaWAN
3D-Map Aided Multipath Mitigation for Urban GNSS Positioning
 Summer School on GNSS 2014 Student Scholarship Award Workshop August 2, 2014 3D-Map Aided Multipath Mitigation for Urban GNSS Positioning I-Wen Chu National Cheng Kung University, Taiwan. Page 1 Outline
Summer School on GNSS 2014 Student Scholarship Award Workshop August 2, 2014 3D-Map Aided Multipath Mitigation for Urban GNSS Positioning I-Wen Chu National Cheng Kung University, Taiwan. Page 1 Outline
Multipath fading effects on short range indoor RF links. White paper
 ALCIOM 5, Parvis Robert Schuman 92370 CHAVILLE - FRANCE Tel/Fax : 01 47 09 30 51 contact@alciom.com www.alciom.com Project : Multipath fading effects on short range indoor RF links DOCUMENT : REFERENCE
ALCIOM 5, Parvis Robert Schuman 92370 CHAVILLE - FRANCE Tel/Fax : 01 47 09 30 51 contact@alciom.com www.alciom.com Project : Multipath fading effects on short range indoor RF links DOCUMENT : REFERENCE
CHAPTER 10 CONCLUSIONS AND FUTURE WORK 10.1 Conclusions
 CHAPTER 10 CONCLUSIONS AND FUTURE WORK 10.1 Conclusions This dissertation reported results of an investigation into the performance of antenna arrays that can be mounted on handheld radios. Handheld arrays
CHAPTER 10 CONCLUSIONS AND FUTURE WORK 10.1 Conclusions This dissertation reported results of an investigation into the performance of antenna arrays that can be mounted on handheld radios. Handheld arrays
SCPL: Indoor Device-Free Multi-Subject Counting and Localization Using Radio Signal Strength
 SCPL: Indoor Device-Free Multi-Subject Counting and Localization Using Radio Signal Strength Rutgers University Chenren Xu Joint work with Bernhard Firner, Robert S. Moore, Yanyong Zhang Wade Trappe, Richard
SCPL: Indoor Device-Free Multi-Subject Counting and Localization Using Radio Signal Strength Rutgers University Chenren Xu Joint work with Bernhard Firner, Robert S. Moore, Yanyong Zhang Wade Trappe, Richard
CS434/534: Topics in Networked (Networking) Systems
 Systems") CS434/534: Topics in Networked (Networking) Systems Wireless Foundation: Wireless Mesh Networks Yang (Richard) Yang Computer Science Department Yale University 08A Watson Email: yry@cs.yale.edu http://zoo.cs.yale.edu/classes/cs434/
CS434/534: Topics in Networked (Networking) Systems Wireless Foundation: Wireless Mesh Networks Yang (Richard) Yang Computer Science Department Yale University 08A Watson Email: yry@cs.yale.edu http://zoo.cs.yale.edu/classes/cs434/
Location-Enhanced Computing
 Location-Enhanced Computing Today s Outline Applications! Lots of different apps out there! Stepping back, big picture Ways of Determining Location Location Privacy Location-Enhanced Applications Provide
Location-Enhanced Computing Today s Outline Applications! Lots of different apps out there! Stepping back, big picture Ways of Determining Location Location Privacy Location-Enhanced Applications Provide
Pixie Location of Things Platform Introduction
 Pixie Location of Things Platform Introduction Location of Things LoT Location of Things (LoT) is an Internet of Things (IoT) platform that differentiates itself on the inclusion of accurate location awareness,
Pixie Location of Things Platform Introduction Location of Things LoT Location of Things (LoT) is an Internet of Things (IoT) platform that differentiates itself on the inclusion of accurate location awareness,