Global Positioning System: what it is and how we use it for measuring the earth s movement. May 5, 2009
|
|
|
- Griffin Carpenter
- 5 years ago
- Views:
Transcription

1 Global Positioning System: what it is and how we use it for measuring the earth s movement. May 5, 2009
2 References Lectures from K. Larson s Introduction to GNSS asen5090/ Strang, G. and K. Borre Linear Algebra, Geodesy, and GPS, Wellesley Cambridge Press, 1997 Blewitt, G., Basics of the GPS Technique: Observation Equations, in Geodetic Applications of GPS GPS/GPS_Tutorial_2.pdf Lecture notes from G. Mattioli (comp.uark.edu/ ~mattioli/geol_4733/gps_signals.ppt)

3 Basics of how it works Trilateration GPS gives distance to 4 satellites x,y,z,t Earth centered, Earth Fixed Why t? What are some of reasons why measuring distance is difficult? How do we know x,y,z,t of satellites?
 All have")

4 GPS: Space segment Several different types of GPS satellites (Block I, II, II A, IIR) All have atomic clocks Stability of at least sec 1 sec every ~300,000 yrs Dynamics of orbit? Reference point?
5 Orbital Perturbations (central force is 0.5 m/s 2) Source Acceleration Perturbation Type m/s 2 3 hrs Earth oblateness (J 2 ) 5 x hrs secular + 6 hr Sun & moon 5 x hrs secular + 12hr Higher Harmonics 3 x hrs Various Solar radiation pressure Ocean & earth tides Earth albedo pressure 1 x days Secular + 3 hr 1 x 10-9 days secular + 12hr 1 x 10-9 days From K. Larson

6 GPS: Space Segment 24+ satellites in orbit Can see 4 at any time, any point on earth Satellites never directly over the poles For most mid latitude locations, satellites track mainly north south

7 GPS: Satellite Ground Track
 code Chip length=293 m Navigation message Broadcast ephemeris (satellite orbital parameters), SV clock corrections, iono info, SV health GPS")
8 Satellite transmits on two carrier frequencies: L1 (wavelength=19 cm) L2 (wavelength=24.4 cm) Transmits 3 different codes/ signals P (precise) code Chip length=29.3 m C/A (course acquisition) code Chip length=293 m Navigation message Broadcast ephemeris (satellite orbital parameters), SV clock corrections, iono info, SV health GPS Signal
 Frequency")
9 GPS Signal Signal phase modulated: vs Amplitude modulation (AM) Frequency modulation (FM)
10 C/A and P code: PRN Codes PRN = Pseudo Random Noise Codes have random noise characteristics but are precisely defined. A sequence of zeros and ones, each zero or one referred to as a chip. Called a chip because they carry no data. Selected from a set of Gold Codes. Gold codes use 2 generator polynomials. Three types are used by GPS C/A, P and Y
11 PRN Codes: first 100 bits
12 PRN Code properties High Autocorrelation value only at a phase shift of zero. Minimal Cross Correlation to other PRN codes, noise and interferers. Allows all satellites to transmit at the same frequency. PRN Codes carry the navigation message and are used for acquisition, tracking and ranging.
13 PRN Code Correlation
14 Non PRN Code Correlation
15 Schematic of C/A code acquisition Since C/A code is 1023 chips long and repeats every 1/1000 s, it is inherently ambiguous by 1 msec or ~300 km.
16 BASIC GPS MEASUREMENT: PSEUDORANGE Receiver measures difference between time of transmission and time of reception based on correlation of received signal with a local replica ρ = s ( u t ) c t t t u s = time of reception as observed by the receiver = time of transmission as generated by the satellite The measured pseudorange is not the true range between the satellite and receiver. That is what we clarify with the observable equation.
17 PSEUDORANGE OBSERVABLE MODEL ( u s ) ( u s ) ρ = R + c δt δt + T + I + M + ε 1 ρ1 ρ1 ρ1 ρ = R + c δt δt + T + I + M + ε 2 ρ 2 ρ 2 ρ 2 ρ ρ 1 2 = pseudorange measured on L1 frequency based on code = pseudorange measured on L2 frequency based on code R = geometrical range from satellite s to user u δt δt u s ρ1/ 2 ρ1/ 2 ρ1/ 2 = user/receiver clock error = satellite clock error T = tropospheric delay I M = ionospheric delay in code measurement on L1/2 = multipath delay in code measurement on L1/2 ε = other delay/errors in code measurement on L1/2
18 CARRIER PHASE MODEL ( u s ) ( u s ) φ λ = R + c δt δt + T I + M + N λ + ε 1 1 ρ1 φ1 1 1 φ1 φ λ = R + c δt δt + T I + M + N λ + ε 2 2 ρ 2 φ φ 2 φ φ 1 2 = carrier phase measured on L1 frequency (C/A or P(Y) parts) = carrier phase measured on L2 frequency R = geometrical range from satellite s to user u δt δt u s = user/receiver clock error = satellite clock error T = tropospheric delay I, I = ionospheric delay in code measurement on L1/2 ρ1 ρ 2 M N, M = multipath delay in carrier phase measurement on L1/2 φ1 φ 2, N = carrier phase bias or ambiguity 1 2 λ, λ = carrier wavelength ε 1 2, ε = other delay/errors in carrier phase measurement on L1/2 φ1 φ 2
19 COMPARE PSEUDORANGE and CARRIER PHASE ( u s ) ( u s ) ρ = R + c δt δt + T + I + M + ε 1 ρ1 ρ1 ρ1 φ λ = R + c δt δt + T I + M + N λ + ε 1 1 ρ1 φ1 1 1 φ1 bias term N does not appear in pseudorange ionospheric delay is equal magnitude but opposite sign troposphere, geometric range, clock, and troposphere errors are the same in both multipath errors are different (phase multipath error much smaller than pseudorange) noise terms are different (factor of 100 smaller in phase data)
 Delay is proportional to temp, pressure,")
20 Atmospheric Effects Ionosphere ( km) Delay is proportional to number of electrons Troposphere (~16 km at equator, where thickest) Delay is proportional to temp, pressure, humidity.

21 Vertical Structure of Atmosphere
22 Tropospheric effects Lowest region of the atmosphere index of refraction = ~ at sea level Neutral gases and water vapor causes a delay which is not a function of frequency for GPS signal Dry component contributes 90 97% Wet component contributes 3 10% Total is about 2.5 m for zenith to 25 m for 5 deg
23 Tropospheric effects At lower elevation angles, the GPS signal travels through more troposphere.
24 Dry Troposphere Delay 3 Saastamoinen model: Tz d = ( cos 2φ ) P 0 is the surface pressure (millibars) φ is the latitude h is the receiver height (m) h P, 0 Hopfield model: Tz, d h d is 43km T 0 is temperature (K) = P h 6 0 T 0 d 5 ~2.5 m at sea level Mapping function: E satellite elevation m d = sin E tan E (zenith) 10 (5 deg)
25 Wet Troposphere Correction Less predictable than dry part, modeled by: Saastamoinen model: T 1255 = e T 3 z, w 0 Hopfield model: T = z, w 2 T0 h w is 12km e 0 is partial pressure of water vapor in mbar e h w cm Mapping function: m d = sin E tan E
26 Examples of Wet Zenith Delay
27 Ionosphere effects Pseudorange is longer group delay Carrier Phase is shorter phase advance s ( ) s ( ) s ( ) s ( ) ρ = R + c δt δt + I + T + MP + ε L1 u ρl1 ρl1 ρl1 ρ = R + c δt δt + I + T + MP + ε L2 u ρl2 ρl2 ρl2 λ φ = R λ N + c δt δt + I + T + MP + ε 1 L1 1 1 u φl1 φl1 φl1 λ φ = R λ N + c δt δt + I + T + MP + ε 1 L2 2 2 u φl2 φl2 φl2 I ρ 2 s ( ) s ( ) 1 L1 1 1 u ρl1 φl1 φl1 1 I φ 40.3 TEC f λ TEC = Total Electron Content φ = R λ N + c δt δt I + T + MP + ε λ φ = R λ N + c δt δt I + T + MP + ε L2 2 2 u ρl2 φl2 φl2
28 Determining Ionospheric Delay I I f 2 ρl1 2 = 2 2 L2 f1 f2 L1 f ( ρ ρ ) 2 ρl2 1 = 2 2 L2 f1 f2 L1 ( ρ ρ ) 2 2 f f TEC = ( ) ( ρ ) 2 2 L2 ρl 1 f1 f2 Ionospheric delay on L1 pseudorange Ionospheric delay on L2 pseudorange Where frequencies are expressed in GHz, pseudoranges are in meters, and TEC is in TECU s (10 16 electrons/m 2 ) 28
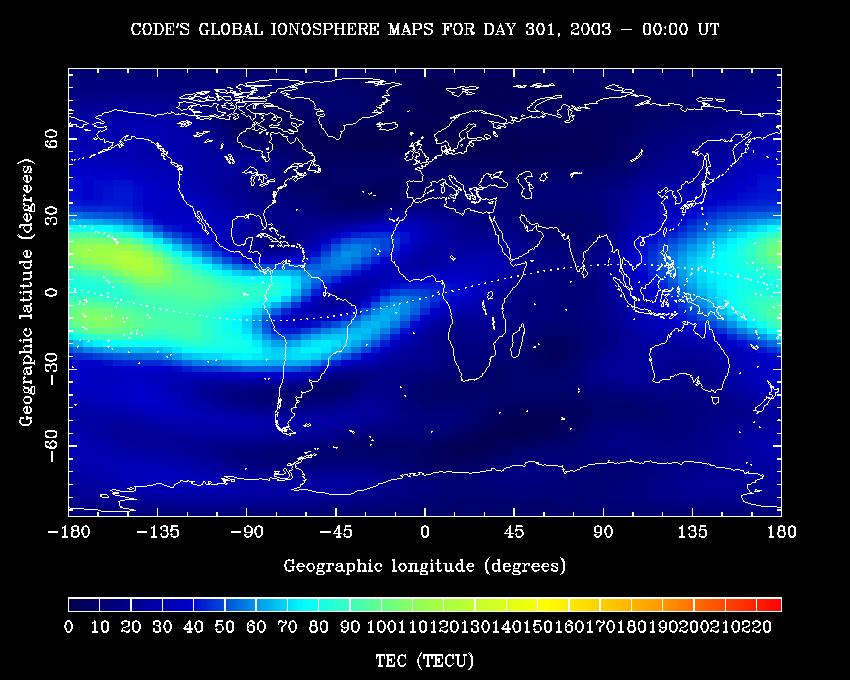
29 Ionosphere maps
30 Ionosphere free Pseudorange f I ρ ρ ρ 2 L1 2 = 2 2 L2 f1 f2 L1 ( ) f f ρ ρ ρ ρ IF = " L3" = 2 2 L1 2 2 L2 f1 f2 f1 f2 ρ = 2.546ρ 1.546ρ IF L1 L2 Ionospheric delay on L1 pseudorange Ionosphere-free pseudorange Ionosphere free pseudoranges are more noisy than individual pseudoranges. 30

31 Multipath Reflected signals Can be mitigated by antenna design Multipath signal repeats with satellite orbits and so can be removed by sidereal filtering
32 Standard Positioning Error Budget Single Frequency Double Frequency Ephemeris Data 2 m 2 m Satellite Clock 2 m 2 m Ionosphere 4 m m Troposphere m m Multipath 0 2 m 0 2 m UERE 5 m 2 4 m UERE = User Equivalent Range Error
33 Intentional Errors in GPS S/A: Selective availability Errors in the satellite orbit or clock Turned off May 2, 2000 With SA 95% of points within 45 m radius. SA off, 95% of points within 6.3 m Didn t effect the precise measurements used for tectonics that much. Why not?
34 Intentional Errors in GPS A/S: Anti spoofing Encryption of the P code (Y code) Different techniques for dealing with A/S Recover L1, L2 phase Can recover pseudorange (range estimated using Pcode) Generally worsens signal to noise ratio
35 AS Technologies Summary Table Ashtech Z 12 & µz Trimble 4000SSi From Ashjaee & Lorenz, 1992
36 PSEUDORANGE OBSERVABLE MODEL ( u s ) ( u s ) ρ = R + c δt δt + T + I + M + ε 1 ρ1 ρ1 ρ1 ρ = R + c δt δt + T + I + M + ε 2 ρ 2 ρ 2 ρ 2 ρ ρ 1 2 = pseudorange measured on L1 frequency based on code = pseudorange measured on L2 frequency based on code R = geometrical range from satellite s to user u δt δt u s ρ1/ 2 ρ1/ 2 ρ1/ 2 = user/receiver clock error = satellite clock error T = tropospheric delay I M = ionospheric delay in code measurement on L1/2 = multipath delay in code measurement on L1/2 ε = other delay/errors in code measurement on L1/2
37 EXAMPLE OF PSEUDORANGE (1) s ( u ) ρ = R + c δt δt + T + I + M + ε 1 ρ1 ρ1 ρ1
38 EXAMPLE OF PSEUDORANGE (2)
39 GEOMETRIC RANGE Distance between position of satellite at time of transmission and position of receiver at time of reception s s s ( u ) ( u ) ( u ) R = x x + y y + z z
40 PSEUDORANGE minus GEOMETRIC s ( u ) Difference is typically dominated by receiver clock or satellite clock. RANGE ρ R = c δt δt + T + I + M + ε 1 ρ1 ρ1 ρ1
41 L1 PSEUDORANGE L2 PSEUDORANGE ( u s ) ( u s ) ρ = R + c δt δt + T + I + M + ε 1 ρ1 ρ1 ρ1 ρ = R + c δt δt + T + I + M + ε 2 ρ 2 ρ 2 ρ 2 ρ ρ = I I + M M + ε ε 1 2 ρ1 ρ 2 ρ1 ρ 2 ρ1 ρ 2 Differencing pseudoranges on two frequencies removes geometrical effects, clocks, troposphere, and some ionosphere


42 Geometry Effects: Dilution of Precision (DOP) Good Geometry Bad Geometry
43 Dilution of Precision VDOP = σ h HDOP = σ 2 + σ 2 n e PDOP = σ 2 + σ 2 + σ 2 n e h TDOP = σ t GDOP = σ 2 + σ 2 + σ 2 + c 2 σ 2 n e h t Covariance is purely a function of satellite geometry
44 Dilution of Precision (VDOP) Wuhan, China, 30 lat Casey station, Antarctica, 66.3 latitude
45 Positioning Most basic: solve system of range equations for 4 unknowns, receiver x,y,z,t P 1 = ( (x 1 x) 2 + (y 1 y) 2 + (z 1 z) 2 ) 1/2 + ct ct 1 P 4 = ( (x 4 x) 2 + (y 4 y) 2 + (z 4 z) 2 ) 1/2 + ct ct 4 Linearize problem by using a reference, or a priori, position for the receiver Even in advanced software, need a good a priori position to get solution.
46 Positioning vs. Differential GPS By differencing observations at two stations to get relative distance, many common errors sources drop out. The closer the stations, the better this works Brings precision up to mm, instead of m.
47 Single Differencing j ΔL AB j = Δρ AB j + cδτ AB + ΔZ AB j ΔI AB j + ΔB AB Removes satellite clock errors Reduces troposphere and ionosphere delays to differential between two sites Gives you relative distance between sites, not absolute position
48 Double Differencing j ΔL AB j = Δρ AB j + cδτ AB + ΔZ AB j ΔI AB j + ΔB AB k ΔL AB k = Δρ AB k + cδτ AB + ΔZ AB k ΔI AB k + ΔB AB jk ΔL AB = Δρ jk AB + ΔZ jk AB ΔI jk jk AB + λ ΔN AB Receiver clock error is gone Random errors are increased (e.g., multipath, measurement noise) Double difference phase ambiguity is an integer
49 High precision GPS for Geodesy Use precise orbit products (e.g., IGS or JPL) Use specialized modeling software GAMIT/GLOBK GIPSY OASIS BERNESE These software packages will Estimate integer ambiguities Reduces rms of East component significantly Model physical processes that effect precise positioning, such as those discussed so far plus Solid Earth Tides Polar Motion, Length of Day Ocean loading Relativistic effects Antenna phase center variations

50 High precision GPS for Geodesy Produce daily station positions with 2 3 mm horizontal repeatability, 10 mm vertical. Can improve these stats by removing common mode error.
UNIT 1 - introduction to GPS
 UNIT 1 - introduction to GPS 1. GPS SIGNAL Each GPS satellite transmit two signal for positioning purposes: L1 signal (carrier frequency of 1,575.42 MHz). Modulated onto the L1 carrier are two pseudorandom
UNIT 1 - introduction to GPS 1. GPS SIGNAL Each GPS satellite transmit two signal for positioning purposes: L1 signal (carrier frequency of 1,575.42 MHz). Modulated onto the L1 carrier are two pseudorandom
GPS for crustal deformation studies. May 7, 2009
 GPS for crustal deformation studies May 7, 2009 High precision GPS for Geodesy Use precise orbit products (e.g., IGS or JPL) Use specialized modeling software GAMIT/GLOBK GIPSY OASIS BERNESE These software
GPS for crustal deformation studies May 7, 2009 High precision GPS for Geodesy Use precise orbit products (e.g., IGS or JPL) Use specialized modeling software GAMIT/GLOBK GIPSY OASIS BERNESE These software
Fundamentals of GPS Navigation
 Fundamentals of GPS Navigation Kiril Alexiev 1 /76 2 /76 At the traditional January media briefing in Paris (January 18, 2017), European Space Agency (ESA) General Director Jan Woerner explained the knowns
Fundamentals of GPS Navigation Kiril Alexiev 1 /76 2 /76 At the traditional January media briefing in Paris (January 18, 2017), European Space Agency (ESA) General Director Jan Woerner explained the knowns
Modelling GPS Observables for Time Transfer
 Modelling GPS Observables for Time Transfer Marek Ziebart Department of Geomatic Engineering University College London Presentation structure Overview of GPS Time frames in GPS Introduction to GPS observables
Modelling GPS Observables for Time Transfer Marek Ziebart Department of Geomatic Engineering University College London Presentation structure Overview of GPS Time frames in GPS Introduction to GPS observables
Errors in GPS. Errors in GPS. Geodetic Co-ordinate system. R. Khosla Fall Semester
 Errors in GPS Errors in GPS GPS is currently the most accurate positioning system available globally. Although we are talking about extreme precision and measuring distances by speed of light, yet there
Errors in GPS Errors in GPS GPS is currently the most accurate positioning system available globally. Although we are talking about extreme precision and measuring distances by speed of light, yet there
Study and analysis of Differential GNSS and Precise Point Positioning
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 9, Issue 2 Ver. I (Mar Apr. 2014), PP 53-59 Study and analysis of Differential GNSS and Precise
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 9, Issue 2 Ver. I (Mar Apr. 2014), PP 53-59 Study and analysis of Differential GNSS and Precise
E. Calais Purdue University - EAS Department Civil 3273
 E. Calais Purdue University - EAS Department Civil 373 ecalais@purdue.edu GPS signal propagation GPS signal (= carrier phase modulated by satellite PRN code) sent by satellite. About 66 msec (0,000 km)
E. Calais Purdue University - EAS Department Civil 373 ecalais@purdue.edu GPS signal propagation GPS signal (= carrier phase modulated by satellite PRN code) sent by satellite. About 66 msec (0,000 km)
An Introduction to GPS
 An Introduction to GPS You are here The GPS system: what is GPS Principles of GPS: how does it work Processing of GPS: getting precise results Yellowstone deformation: an example What is GPS? System to
An Introduction to GPS You are here The GPS system: what is GPS Principles of GPS: how does it work Processing of GPS: getting precise results Yellowstone deformation: an example What is GPS? System to
FieldGenius Technical Notes GPS Terminology
 FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
Global Navigation Satellite Systems II
 Global Navigation Satellite Systems II AERO4701 Space Engineering 3 Week 4 Last Week Examined the problem of satellite coverage and constellation design Looked at the GPS satellite constellation Overview
Global Navigation Satellite Systems II AERO4701 Space Engineering 3 Week 4 Last Week Examined the problem of satellite coverage and constellation design Looked at the GPS satellite constellation Overview
Guochang Xu GPS. Theory, Algorithms and Applications. Second Edition. With 59 Figures. Sprin ger
 Guochang Xu GPS Theory, Algorithms and Applications Second Edition With 59 Figures Sprin ger Contents 1 Introduction 1 1.1 AKeyNoteofGPS 2 1.2 A Brief Message About GLONASS 3 1.3 Basic Information of Galileo
Guochang Xu GPS Theory, Algorithms and Applications Second Edition With 59 Figures Sprin ger Contents 1 Introduction 1 1.1 AKeyNoteofGPS 2 1.2 A Brief Message About GLONASS 3 1.3 Basic Information of Galileo
GPS Error and Biases
 Component-I(A) - Personal Details Role Name Affiliation Principal Investigator Prof.MasoodAhsanSiddiqui Department of Geography, JamiaMilliaIslamia, New Delhi Paper Coordinator, if any Dr. Mahaveer Punia
Component-I(A) - Personal Details Role Name Affiliation Principal Investigator Prof.MasoodAhsanSiddiqui Department of Geography, JamiaMilliaIslamia, New Delhi Paper Coordinator, if any Dr. Mahaveer Punia
Resection. We can measure direction in the real world! Lecture 10: Position Determination. Resection Example: Isola, Slovenia. Professor Keith Clarke
 Geography 12: Maps and Spatial Reasoning Lecture 10: Position Determination We can measure direction in the real world! Professor Keith Clarke Resection Resection Example: Isola, Slovenia Back azimuth
Geography 12: Maps and Spatial Reasoning Lecture 10: Position Determination We can measure direction in the real world! Professor Keith Clarke Resection Resection Example: Isola, Slovenia Back azimuth
Fundamentals of GPS for high-precision geodesy
 Fundamentals of GPS for high-precision geodesy T. A. Herring M. A. Floyd R. W. King Massachusetts Institute of Technology, Cambridge, MA, USA UNAVCO Headquarters, Boulder, Colorado, USA 19 23 June 2017
Fundamentals of GPS for high-precision geodesy T. A. Herring M. A. Floyd R. W. King Massachusetts Institute of Technology, Cambridge, MA, USA UNAVCO Headquarters, Boulder, Colorado, USA 19 23 June 2017
Wednesday AM: (Doug) 2. PS and Long Period Signals
 2. PS and Long Period Signals") Wednesday AM: (Doug) 2 PS and Long Period Signals What is Colorado famous for? 32 satellites 12 Early on in the world of science synchronization of clocks was found to be important. consider Paris: puffs
Wednesday AM: (Doug) 2 PS and Long Period Signals What is Colorado famous for? 32 satellites 12 Early on in the world of science synchronization of clocks was found to be important. consider Paris: puffs
The Global Positioning System
 The Global Positioning System Principles of GPS positioning GPS signal and observables Errors and corrections Processing GPS data GPS measurement strategies Precision and accuracy E. Calais Purdue University
The Global Positioning System Principles of GPS positioning GPS signal and observables Errors and corrections Processing GPS data GPS measurement strategies Precision and accuracy E. Calais Purdue University
Monitoring the Ionosphere and Neutral Atmosphere with GPS
 Monitoring the Ionosphere and Neutral Atmosphere with GPS Richard B. Langley Geodetic Research Laboratory Department of Geodesy and Geomatics Engineering University of New Brunswick Fredericton, N.B. Division
Monitoring the Ionosphere and Neutral Atmosphere with GPS Richard B. Langley Geodetic Research Laboratory Department of Geodesy and Geomatics Engineering University of New Brunswick Fredericton, N.B. Division
GPS and Recent Alternatives for Localisation. Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney
 GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
GPS STATIC-PPP POSITIONING ACCURACY VARIATION WITH OBSERVATION RECORDING INTERVAL FOR HYDROGRAPHIC APPLICATIONS (ASWAN, EGYPT)
") GPS STATIC-PPP POSITIONING ACCURACY VARIATION WITH OBSERVATION RECORDING INTERVAL FOR HYDROGRAPHIC APPLICATIONS (ASWAN, EGYPT) Ashraf Farah Associate Professor,College of Engineering, Aswan University,
GPS STATIC-PPP POSITIONING ACCURACY VARIATION WITH OBSERVATION RECORDING INTERVAL FOR HYDROGRAPHIC APPLICATIONS (ASWAN, EGYPT) Ashraf Farah Associate Professor,College of Engineering, Aswan University,
GPS the Interdisciplinary Chameleon: How Does it do That?
 GPS the Interdisciplinary Chameleon: How Does it do That? Geoff Blewitt Nevada Bureau of Mines and Geology & Seismological Laboratory University of Nevada, Reno, USA Cool Science using GPS Application
GPS the Interdisciplinary Chameleon: How Does it do That? Geoff Blewitt Nevada Bureau of Mines and Geology & Seismological Laboratory University of Nevada, Reno, USA Cool Science using GPS Application
3. Radio Occultation Principles
 Page 1 of 6 [Up] [Previous] [Next] [Home] 3. Radio Occultation Principles The radio occultation technique was first developed at the Stanford University Center for Radar Astronomy (SUCRA) for studies of
Page 1 of 6 [Up] [Previous] [Next] [Home] 3. Radio Occultation Principles The radio occultation technique was first developed at the Stanford University Center for Radar Astronomy (SUCRA) for studies of
Global Positioning System (GPS) Positioning Errors During Ionospheric Scintillation Event. Keywords: GPS; scintillation; positioning error
 Positioning Errors During Ionospheric Scintillation Event. Keywords: GPS; scintillation; positioning error") Jurnal Teknologi Full paper Global Positioning System (GPS) Positioning Errors During Ionospheric Scintillation Event Y. H. Ho a*, S. Abdullah b, M. H. Mokhtar b a Faculty of Electronic and Computer Engineering,
Jurnal Teknologi Full paper Global Positioning System (GPS) Positioning Errors During Ionospheric Scintillation Event Y. H. Ho a*, S. Abdullah b, M. H. Mokhtar b a Faculty of Electronic and Computer Engineering,
Global Navigation Satellite Systems (GNSS)Part I EE 570: Location and Navigation
Part I EE 570: Location and Navigation") Lecture Global Navigation Satellite Systems (GNSS)Part I EE 570: Location and Navigation Lecture Notes Update on April 25, 2016 Aly El-Osery and Kevin Wedeward, Electrical Engineering Dept., New Mexico
Lecture Global Navigation Satellite Systems (GNSS)Part I EE 570: Location and Navigation Lecture Notes Update on April 25, 2016 Aly El-Osery and Kevin Wedeward, Electrical Engineering Dept., New Mexico
Basics of GPS Jeff Freymueller UAF Geophysical Inst.
 Basics of GPS Jeff Freymueller UAF Geophysical Inst. GPS Design Timeline NAVSTAR = NAVigaDon System with Timing and Ranging Always on, instant global posidoning Development began in 1973 First satellites
Basics of GPS Jeff Freymueller UAF Geophysical Inst. GPS Design Timeline NAVSTAR = NAVigaDon System with Timing and Ranging Always on, instant global posidoning Development began in 1973 First satellites
ESTIMATION OF IONOSPHERIC DELAY FOR SINGLE AND DUAL FREQUENCY GPS RECEIVERS: A COMPARISON
 ESTMATON OF ONOSPHERC DELAY FOR SNGLE AND DUAL FREQUENCY GPS RECEVERS: A COMPARSON K. Durga Rao, Dr. V B S Srilatha ndira Dutt Dept. of ECE, GTAM UNVERSTY Abstract: Global Positioning System is the emerging
ESTMATON OF ONOSPHERC DELAY FOR SNGLE AND DUAL FREQUENCY GPS RECEVERS: A COMPARSON K. Durga Rao, Dr. V B S Srilatha ndira Dutt Dept. of ECE, GTAM UNVERSTY Abstract: Global Positioning System is the emerging
t =1 Transmitter #2 Figure 1-1 One Way Ranging Schematic
 1.0 Introduction OpenSource GPS is open source software that runs a GPS receiver based on the Zarlink GP2015 / GP2021 front end and digital processing chipset. It is a fully functional GPS receiver which
1.0 Introduction OpenSource GPS is open source software that runs a GPS receiver based on the Zarlink GP2015 / GP2021 front end and digital processing chipset. It is a fully functional GPS receiver which
ENGI 3703 Surveying and Geomatics
 Satellite Geometry: Satellites well spread out in the sky have a much stronger solution to the resection type problem (aka trilateration) then satellite that are grouped together. Since the position of
Satellite Geometry: Satellites well spread out in the sky have a much stronger solution to the resection type problem (aka trilateration) then satellite that are grouped together. Since the position of
LOCAL IONOSPHERIC MODELLING OF GPS CODE AND CARRIER PHASE OBSERVATIONS
 Survey Review, 40, 309 pp.71-84 (July 008) LOCAL IONOSPHERIC MODELLING OF GPS CODE AND CARRIER PHASE OBSERVATIONS H. Nahavandchi and A. Soltanpour Norwegian University of Science and Technology, Division
Survey Review, 40, 309 pp.71-84 (July 008) LOCAL IONOSPHERIC MODELLING OF GPS CODE AND CARRIER PHASE OBSERVATIONS H. Nahavandchi and A. Soltanpour Norwegian University of Science and Technology, Division
CHAPTER 2 GPS GEODESY. Estelar. The science of geodesy is concerned with the earth by quantitatively
 CHAPTER 2 GPS GEODESY 2.1. INTRODUCTION The science of geodesy is concerned with the earth by quantitatively describing the coordinates of each point on the surface in a global or local coordinate system.
CHAPTER 2 GPS GEODESY 2.1. INTRODUCTION The science of geodesy is concerned with the earth by quantitatively describing the coordinates of each point on the surface in a global or local coordinate system.
Tajul Ariffin Musa. Tajul A. Musa. Dept. of Geomatics Eng, FKSG, Universiti Teknologi Malaysia, Skudai, Johor, MALAYSIA.
 Tajul Ariffin Musa Dept. of Geomatics Eng, FKSG, Universiti Teknologi Malaysia, 81310 Skudai, Johor, MALAYSIA. Phone : +6075530830;+6075530883; Mobile : +60177294601 Fax : +6075566163 E-mail : tajul@fksg.utm.my
Tajul Ariffin Musa Dept. of Geomatics Eng, FKSG, Universiti Teknologi Malaysia, 81310 Skudai, Johor, MALAYSIA. Phone : +6075530830;+6075530883; Mobile : +60177294601 Fax : +6075566163 E-mail : tajul@fksg.utm.my
GPS: The Basics. Darrell R. Dean, Jr. Civil and Environmental Engineering West Virginia University. Expected Learning Outcomes for GPS
 GPS: The Basics Darrell R. Dean, Jr. Civil and Environmental Engineering West Virginia University Expected Learning Outcomes for GPS Explain the acronym GPS Name 3 important tdt dates in history of GPS
GPS: The Basics Darrell R. Dean, Jr. Civil and Environmental Engineering West Virginia University Expected Learning Outcomes for GPS Explain the acronym GPS Name 3 important tdt dates in history of GPS
Investigation on the Impact of Tropospheric Delay on GPS Height Variation near the Equator
 Investigation on the Impact of Tropospheric Delay on GPS Height Variation near the Equator Abstract One of the major problems currently facing satellite-based positioning is the atmospheric refraction
Investigation on the Impact of Tropospheric Delay on GPS Height Variation near the Equator Abstract One of the major problems currently facing satellite-based positioning is the atmospheric refraction
Trimble Business Center:
 Trimble Business Center: Modernized Approaches for GNSS Baseline Processing Trimble s industry-leading software includes a new dedicated processor for static baselines. The software features dynamic selection
Trimble Business Center: Modernized Approaches for GNSS Baseline Processing Trimble s industry-leading software includes a new dedicated processor for static baselines. The software features dynamic selection
Broadcast Ionospheric Model Accuracy and the Effect of Neglecting Ionospheric Effects on C/A Code Measurements on a 500 km Baseline
 Broadcast Ionospheric Model Accuracy and the Effect of Neglecting Ionospheric Effects on C/A Code Measurements on a 500 km Baseline Intro By David MacDonald Waypoint Consulting May 2002 The ionosphere
Broadcast Ionospheric Model Accuracy and the Effect of Neglecting Ionospheric Effects on C/A Code Measurements on a 500 km Baseline Intro By David MacDonald Waypoint Consulting May 2002 The ionosphere
Precision N N. wrms. and σ i. y i
 Precision Time series = successive estimates of site position + formal errors First order analysis: Fit a straight line using a least square adjustment and compute a standard deviation Slope Associated
Precision Time series = successive estimates of site position + formal errors First order analysis: Fit a straight line using a least square adjustment and compute a standard deviation Slope Associated
GNSS & Coordinate Systems
 GNSS & Coordinate Systems Matthew McAdam, Marcelo Santos University of New Brunswick, Department of Geodesy and Geomatics Engineering, Fredericton, NB May 29, 2012 Santos, 2004 msantos@unb.ca 1 GNSS GNSS
GNSS & Coordinate Systems Matthew McAdam, Marcelo Santos University of New Brunswick, Department of Geodesy and Geomatics Engineering, Fredericton, NB May 29, 2012 Santos, 2004 msantos@unb.ca 1 GNSS GNSS
Multipath and Atmospheric Propagation Errors in Offshore Aviation DGPS Positioning
 Multipath and Atmospheric Propagation Errors in Offshore Aviation DGPS Positioning J. Paul Collins, Peter J. Stewart and Richard B. Langley 2nd Workshop on Offshore Aviation Research Centre for Cold Ocean
Multipath and Atmospheric Propagation Errors in Offshore Aviation DGPS Positioning J. Paul Collins, Peter J. Stewart and Richard B. Langley 2nd Workshop on Offshore Aviation Research Centre for Cold Ocean
PDHonline Course L105 (12 PDH) GPS Surveying. Instructor: Jan Van Sickle, P.L.S. PDH Online PDH Center
 GPS Surveying. Instructor: Jan Van Sickle, P.L.S. PDH Online PDH Center") PDHonline Course L105 (12 PDH) GPS Surveying Instructor: Jan Van Sickle, P.L.S. 2012 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
PDHonline Course L105 (12 PDH) GPS Surveying Instructor: Jan Van Sickle, P.L.S. 2012 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
Using GPS Receivers to Study the Upper Atmosphere
 Using GPS Receivers to Study the Upper Atmosphere Jonathan J. Makela University of Illinois at Urbana-Champaign jmakela@illinois.edu With a big THANKS to Anthea Coster for providing some very useful slides!
Using GPS Receivers to Study the Upper Atmosphere Jonathan J. Makela University of Illinois at Urbana-Champaign jmakela@illinois.edu With a big THANKS to Anthea Coster for providing some very useful slides!
EE 570: Location and Navigation
 EE 570: Location and Navigation Global Navigation Satellite Systems (GNSS) Part I Aly El-Osery Kevin Wedeward Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA In Collaboration
EE 570: Location and Navigation Global Navigation Satellite Systems (GNSS) Part I Aly El-Osery Kevin Wedeward Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA In Collaboration
Space Weather and the Ionosphere
 Dynamic Positioning Conference October 17-18, 2000 Sensors Space Weather and the Ionosphere Grant Marshall Trimble Navigation, Inc. Note: Use the Page Down key to view this presentation correctly Space
Dynamic Positioning Conference October 17-18, 2000 Sensors Space Weather and the Ionosphere Grant Marshall Trimble Navigation, Inc. Note: Use the Page Down key to view this presentation correctly Space
Sources of Error in Satellite Navigation Positioning
 http://www.transnav.eu the International Journal on Marine Navigation and Safety of Sea Transportation Volume 11 Number 3 September 2017 DOI: 10.12716/1001.11.03.04 Sources of Error in Satellite Navigation
http://www.transnav.eu the International Journal on Marine Navigation and Safety of Sea Transportation Volume 11 Number 3 September 2017 DOI: 10.12716/1001.11.03.04 Sources of Error in Satellite Navigation
Introduction to GNSS
 Introduction to GNSS Dimitrios Bolkas, Ph.D. Department of Surveying Engineering, Pennsylvania State University, Wilkes Barre Campus PSLS Surveyor s Conference January 21-24, 2018 Hershey, PA Global Navigation
Introduction to GNSS Dimitrios Bolkas, Ph.D. Department of Surveying Engineering, Pennsylvania State University, Wilkes Barre Campus PSLS Surveyor s Conference January 21-24, 2018 Hershey, PA Global Navigation
GPS Global Positioning System
 GPS Global Positioning System 10.04.2012 1 Agenda What is GPS? Basic consept History GPS receivers How they work Comunication Message format Satellite frequencies Sources of GPS signal errors 10.04.2012
GPS Global Positioning System 10.04.2012 1 Agenda What is GPS? Basic consept History GPS receivers How they work Comunication Message format Satellite frequencies Sources of GPS signal errors 10.04.2012
GPS POSITIONING GUIDE
 GPS POSITIONING GUIDE (July 1993) Third printing July 1995 This product is available from: Natural Resources Canada* Geomatics Canada Geodetic Survey Division Information Services 615 Booth Street Ottawa,
GPS POSITIONING GUIDE (July 1993) Third printing July 1995 This product is available from: Natural Resources Canada* Geomatics Canada Geodetic Survey Division Information Services 615 Booth Street Ottawa,
Proceedings of Al-Azhar Engineering 7 th International Conference Cairo, April 7-10, 2003.
 Proceedings of Al-Azhar Engineering 7 th International Conference Cairo, April 7-10, 2003. MODERNIZATION PLAN OF GPS IN 21 st CENTURY AND ITS IMPACTS ON SURVEYING APPLICATIONS G. M. Dawod Survey Research
Proceedings of Al-Azhar Engineering 7 th International Conference Cairo, April 7-10, 2003. MODERNIZATION PLAN OF GPS IN 21 st CENTURY AND ITS IMPACTS ON SURVEYING APPLICATIONS G. M. Dawod Survey Research
Introduction to GNSS
 Introduction to GNSS Dimitrios Bolkas, Ph.D. Department of Surveying Engineering, Pennsylvania State University, Wilkes Barre Campus PSLS Surveyor s Conference Hershey, PA Global Navigation Satellite System
Introduction to GNSS Dimitrios Bolkas, Ph.D. Department of Surveying Engineering, Pennsylvania State University, Wilkes Barre Campus PSLS Surveyor s Conference Hershey, PA Global Navigation Satellite System
Introduction to DGNSS
 Introduction to DGNSS Jaume Sanz Subirana J. Miguel Juan Zornoza Research group of Astronomy & Geomatics (gage) Technical University of Catalunya (UPC), Spain. Web site: http://www.gage.upc.edu Hanoi,
Introduction to DGNSS Jaume Sanz Subirana J. Miguel Juan Zornoza Research group of Astronomy & Geomatics (gage) Technical University of Catalunya (UPC), Spain. Web site: http://www.gage.upc.edu Hanoi,
VARIATION OF STATIC-PPP POSITIONING ACCURACY USING GPS-SINGLE FREQUENCY OBSERVATIONS (ASWAN, EGYPT)
") ARTIFICIAL SATELLITES, Vol. 52, No. 2 2017 DOI: 10.1515/arsa-2017-0003 VARIATION OF STATIC-PPP POSITIONING ACCURACY USING GPS-SINGLE FREQUENCY OBSERVATIONS (ASWAN, EGYPT) Ashraf Farah Associate professor,
ARTIFICIAL SATELLITES, Vol. 52, No. 2 2017 DOI: 10.1515/arsa-2017-0003 VARIATION OF STATIC-PPP POSITIONING ACCURACY USING GPS-SINGLE FREQUENCY OBSERVATIONS (ASWAN, EGYPT) Ashraf Farah Associate professor,
Bernese GPS Software 4.2
 Bernese GPS Software 4.2 Introduction Signal Processing Geodetic Use Details of modules Bernese GPS Software 4.2 Highest Accuracy GPS Surveys Research and Education Big Permanent GPS arrays Commercial
Bernese GPS Software 4.2 Introduction Signal Processing Geodetic Use Details of modules Bernese GPS Software 4.2 Highest Accuracy GPS Surveys Research and Education Big Permanent GPS arrays Commercial
The Global Positioning System
 The Global Positioning System 5-1 US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites
The Global Positioning System 5-1 US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites
GPS Glossary Written by Carl Carter SiRF Technology 2005
 GPS Glossary Written by Carl Carter SiRF Technology 2005 This glossary provides supplementary information for students of GPS Fundamentals. While many of the terms can have other definitions from those
GPS Glossary Written by Carl Carter SiRF Technology 2005 This glossary provides supplementary information for students of GPS Fundamentals. While many of the terms can have other definitions from those
Chapter 6 GPS Relative Positioning Determination Concepts
 Chapter 6 GPS Relative Positioning Determination Concepts 6-1. General Absolute positioning, as discussed earlier, will not provide the accuracies needed for most USACE control projects due to existing
Chapter 6 GPS Relative Positioning Determination Concepts 6-1. General Absolute positioning, as discussed earlier, will not provide the accuracies needed for most USACE control projects due to existing
Multipath Error Detection Using Different GPS Receiver s Antenna
 Multipath Error Detection Using Different GPS Receiver s Antenna Md. Nor KAMARUDIN and Zulkarnaini MAT AMIN, Malaysia Key words: GPS, Multipath error detection, antenna residual SUMMARY The use of satellite
Multipath Error Detection Using Different GPS Receiver s Antenna Md. Nor KAMARUDIN and Zulkarnaini MAT AMIN, Malaysia Key words: GPS, Multipath error detection, antenna residual SUMMARY The use of satellite
What is a GPS How does GPS work? GPS Segments GPS P osition Position Position Accuracy Accuracy Accuracy GPS A pplications Applications Applications
 What is GPS? What is a GPS How does GPS work? GPS Segments GPS Position Accuracy GPS Applications What is GPS? The Global Positioning System (GPS) is a precise worldwide radio-navigation system, and consists
What is GPS? What is a GPS How does GPS work? GPS Segments GPS Position Accuracy GPS Applications What is GPS? The Global Positioning System (GPS) is a precise worldwide radio-navigation system, and consists
Asia Oceania Regional Workshop on GNSS Precise Point Positioning Experiment by using QZSS LEX
 Asia Oceania Regional Workshop on GNSS 2010 Precise Point Positioning Experiment by using QZSS LEX Tomoji TAKASU Tokyo University of Marine Science and Technology Contents Introduction of QZSS LEX Evaluation
Asia Oceania Regional Workshop on GNSS 2010 Precise Point Positioning Experiment by using QZSS LEX Tomoji TAKASU Tokyo University of Marine Science and Technology Contents Introduction of QZSS LEX Evaluation
GPS Milestones, cont. GPS Milestones. The Global Positioning Sytem, Part 1 10/10/2017. M. Helper, GEO 327G/386G, UT Austin 1. US GPS Facts of Note
 The Global Positioning System US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites (SVs)
The Global Positioning System US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites (SVs)
Principles of the Global Positioning System Lecture 19
 12.540 Principles of the Global Positioning System Lecture 19 Prof. Thomas Herring http://geoweb.mit.edu/~tah/12.540 GPS Models and processing Summary: Finish up modeling aspects Rank deficiencies Processing
12.540 Principles of the Global Positioning System Lecture 19 Prof. Thomas Herring http://geoweb.mit.edu/~tah/12.540 GPS Models and processing Summary: Finish up modeling aspects Rank deficiencies Processing
Effect of Quasi Zenith Satellite (QZS) on GPS Positioning
 on GPS Positioning") Effect of Quasi Zenith Satellite (QZS) on GPS ing Tomoji Takasu 1, Takuji Ebinuma 2, and Akio Yasuda 3 Laboratory of Satellite Navigation, Tokyo University of Marine Science and Technology 1 (Tel: +81-5245-7365,
Effect of Quasi Zenith Satellite (QZS) on GPS ing Tomoji Takasu 1, Takuji Ebinuma 2, and Akio Yasuda 3 Laboratory of Satellite Navigation, Tokyo University of Marine Science and Technology 1 (Tel: +81-5245-7365,
TREATMENT OF DIFFRACTION EFFECTS CAUSED BY MOUNTAIN RIDGES
 TREATMENT OF DIFFRACTION EFFECTS CAUSED BY MOUNTAIN RIDGES Rainer Klostius, Andreas Wieser, Fritz K. Brunner Institute of Engineering Geodesy and Measurement Systems, Graz University of Technology, Steyrergasse
TREATMENT OF DIFFRACTION EFFECTS CAUSED BY MOUNTAIN RIDGES Rainer Klostius, Andreas Wieser, Fritz K. Brunner Institute of Engineering Geodesy and Measurement Systems, Graz University of Technology, Steyrergasse
Effects of magnetic storms on GPS signals
 Effects of magnetic storms on GPS signals Andreja Sušnik Supervisor: doc.dr. Biagio Forte Outline 1. Background - GPS system - Ionosphere 2. Ionospheric Scintillations 3. Experimental data 4. Conclusions
Effects of magnetic storms on GPS signals Andreja Sušnik Supervisor: doc.dr. Biagio Forte Outline 1. Background - GPS system - Ionosphere 2. Ionospheric Scintillations 3. Experimental data 4. Conclusions
TEST YOUR SATELLITE NAVIGATION PERFORMANCE ON YOUR ANDROID DEVICE GLOSSARY
 TEST YOUR SATELLITE NAVIGATION PERFORMANCE ON YOUR ANDROID DEVICE GLOSSARY THE GLOSSARY This glossary aims to clarify and explain the acronyms used in GNSS and satellite navigation performance testing
TEST YOUR SATELLITE NAVIGATION PERFORMANCE ON YOUR ANDROID DEVICE GLOSSARY THE GLOSSARY This glossary aims to clarify and explain the acronyms used in GNSS and satellite navigation performance testing
Sidereal Filtering Based on GPS Single Differences for Mitigating Multipath Effects
 International Global Navigation Satellite Systems Society IGNSS Symposium 2007 The University of New South Wales, Sydney, ustralia 4 6 December, 2007 Sidereal Filtering Based on GPS Single Differences
International Global Navigation Satellite Systems Society IGNSS Symposium 2007 The University of New South Wales, Sydney, ustralia 4 6 December, 2007 Sidereal Filtering Based on GPS Single Differences
Determination of refractivity variations with GNSS and ultra-stable frequency standards
 Determination of refractivity variations with GNSS and ultra-stable frequency standards Markus Vennebusch, Steffen Schön, Ulrich Weinbach Institut für Erdmessung (IfE) / Institute of Geodesy Leibniz-Universität
Determination of refractivity variations with GNSS and ultra-stable frequency standards Markus Vennebusch, Steffen Schön, Ulrich Weinbach Institut für Erdmessung (IfE) / Institute of Geodesy Leibniz-Universität
2. GPS and GLONASS Basic Facts
 2. GPS and GLONASS Basic Facts In 1973 the U.S. Department of Defense decided to establish, develop, test, acquire, and deploy a spaceborne Global Positioning System (GPS). The result of this decision
2. GPS and GLONASS Basic Facts In 1973 the U.S. Department of Defense decided to establish, develop, test, acquire, and deploy a spaceborne Global Positioning System (GPS). The result of this decision
Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions
 Table of Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions page xiii xix xx xxi xxv Part I GNSS: orbits, signals, and methods 1 GNSS ground
Table of Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions page xiii xix xx xxi xxv Part I GNSS: orbits, signals, and methods 1 GNSS ground
Introduction to Geographic Information Science. Last Lecture. Today s Outline. Geography 4103 / GNSS/GPS Technology
 Geography 4103 / 5103 Introduction to Geographic Information Science GNSS/GPS Technology Last Lecture Geoids Ellipsoid Datum Projection Basics Today s Outline GNSS technology How satellite based navigation
Geography 4103 / 5103 Introduction to Geographic Information Science GNSS/GPS Technology Last Lecture Geoids Ellipsoid Datum Projection Basics Today s Outline GNSS technology How satellite based navigation
Estimation Method of Ionospheric TEC Distribution using Single Frequency Measurements of GPS Signals
 Estimation Method of Ionospheric TEC Distribution using Single Frequency Measurements of GPS Signals Win Zaw Hein #, Yoshitaka Goto #, Yoshiya Kasahara # # Division of Electrical Engineering and Computer
Estimation Method of Ionospheric TEC Distribution using Single Frequency Measurements of GPS Signals Win Zaw Hein #, Yoshitaka Goto #, Yoshiya Kasahara # # Division of Electrical Engineering and Computer
Atmospheric propagation
 Atmospheric propagation Johannes Böhm EGU and IVS Training School on VLBI for Geodesy and Astrometry Aalto University, Finland March 2-5, 2013 Outline Part I. Ionospheric effects on microwave signals (1)
Atmospheric propagation Johannes Böhm EGU and IVS Training School on VLBI for Geodesy and Astrometry Aalto University, Finland March 2-5, 2013 Outline Part I. Ionospheric effects on microwave signals (1)
Precise Positioning with NovAtel CORRECT Including Performance Analysis
 Precise Positioning with NovAtel CORRECT Including Performance Analysis NovAtel White Paper April 2015 Overview This article provides an overview of the challenges and techniques of precise GNSS positioning.
Precise Positioning with NovAtel CORRECT Including Performance Analysis NovAtel White Paper April 2015 Overview This article provides an overview of the challenges and techniques of precise GNSS positioning.
GPS: History, Operation, Processing
 GPS: History, Operation, Processing Impor tant Dates 1970 s: conceived as radionavigation system for the US military: realtime locations with few-meter accuracy. 1978: first satellite launched 1983: Declared
GPS: History, Operation, Processing Impor tant Dates 1970 s: conceived as radionavigation system for the US military: realtime locations with few-meter accuracy. 1978: first satellite launched 1983: Declared
Integer Ambiguity Resolution for Precise Point Positioning Patrick Henkel
 Integer Ambiguity Resolution for Precise Point Positioning Patrick Henkel Overview Introduction Sequential Best-Integer Equivariant Estimation Multi-frequency code carrier linear combinations Galileo:
Integer Ambiguity Resolution for Precise Point Positioning Patrick Henkel Overview Introduction Sequential Best-Integer Equivariant Estimation Multi-frequency code carrier linear combinations Galileo:
EFFECTS OF IONOSPHERIC SMALL-SCALE STRUCTURES ON GNSS
 EFFECTS OF IONOSPHERIC SMALL-SCALE STRUCTURES ON GNSS G. Wautelet, S. Lejeune, R. Warnant Royal Meteorological Institute of Belgium, Avenue Circulaire 3 B-8 Brussels (Belgium) e-mail: gilles.wautelet@oma.be
EFFECTS OF IONOSPHERIC SMALL-SCALE STRUCTURES ON GNSS G. Wautelet, S. Lejeune, R. Warnant Royal Meteorological Institute of Belgium, Avenue Circulaire 3 B-8 Brussels (Belgium) e-mail: gilles.wautelet@oma.be
GNSS Technologies. PPP and RTK
 PPP and RTK 29.02.2016 Content Carrier phase based positioning PPP RTK VRS Slides based on: GNSS Applications and Methods, by S. Gleason and D. Gebre-Egziabher (Eds.), Artech House Inc., 2009 http://www.gnssapplications.org/
PPP and RTK 29.02.2016 Content Carrier phase based positioning PPP RTK VRS Slides based on: GNSS Applications and Methods, by S. Gleason and D. Gebre-Egziabher (Eds.), Artech House Inc., 2009 http://www.gnssapplications.org/
APPENDIX GPS TERMINOLOGY
 APPENDIX GPS TERMINOLOGY Almanac Data transmitted by a GPS satellite which includes orbital information on all the satellites, clock correction, and atmospheric delay parameters. These data are used to
APPENDIX GPS TERMINOLOGY Almanac Data transmitted by a GPS satellite which includes orbital information on all the satellites, clock correction, and atmospheric delay parameters. These data are used to
Global Correction Services for GNSS
 Global Correction Services for GNSS Hemisphere GNSS Whitepaper September 5, 2015 Overview Since the early days of GPS, new industries emerged while existing industries evolved to use position data in real-time.
Global Correction Services for GNSS Hemisphere GNSS Whitepaper September 5, 2015 Overview Since the early days of GPS, new industries emerged while existing industries evolved to use position data in real-time.
Global Positioning Systems (GPS) Trails: the achilles heel of mapping from the air / satellites
 Trails: the achilles heel of mapping from the air / satellites") Global Positioning Systems (GPS) Trails: the achilles heel of mapping from the air / satellites Google maps updated regularly by local users using GPS Also: http://openstreetmaps.org GPS applications
Global Positioning Systems (GPS) Trails: the achilles heel of mapping from the air / satellites Google maps updated regularly by local users using GPS Also: http://openstreetmaps.org GPS applications
A Tropospheric Delay Model for the user of the Wide Area Augmentation System
 A Tropospheric Delay Model for the user of the Wide Area Augmentation System J. Paul Collins and Richard B. Langley 1st October 1996 +641&7%6+1 OBJECTIVES Develop and test a tropospheric propagation delay
A Tropospheric Delay Model for the user of the Wide Area Augmentation System J. Paul Collins and Richard B. Langley 1st October 1996 +641&7%6+1 OBJECTIVES Develop and test a tropospheric propagation delay
Data acquisition and integration 3.
 University of West Hungary, Faculty of Geoinformatics Bányai László Data acquisition and integration 3. module DAI3 Global Navigation Satellite System SZÉKESFEHÉRVÁR 2010 The right to this intellectual
University of West Hungary, Faculty of Geoinformatics Bányai László Data acquisition and integration 3. module DAI3 Global Navigation Satellite System SZÉKESFEHÉRVÁR 2010 The right to this intellectual
Global Positioning Systems -GPS
 Global Positioning Systems -GPS GPS Why? What is it? How does it work? Differential GPS How can it help me? GPS Why?? Where am I? How do I get there? Where are you, and how do I get to You? WHO CARES???
Global Positioning Systems -GPS GPS Why? What is it? How does it work? Differential GPS How can it help me? GPS Why?? Where am I? How do I get there? Where are you, and how do I get to You? WHO CARES???
AUSPOS GPS Processing Report
 AUSPOS GPS Processing Report February 13, 2012 This document is a report of the GPS data processing undertaken by the AUSPOS Online GPS Processing Service (version: AUSPOS 2.02). The AUSPOS Online GPS
AUSPOS GPS Processing Report February 13, 2012 This document is a report of the GPS data processing undertaken by the AUSPOS Online GPS Processing Service (version: AUSPOS 2.02). The AUSPOS Online GPS
GPS for. Land Surveyors. Jan Van Sickle. Fourth Edition. CRC Press. Taylor & Francis Group. Taylor & Francis Croup, an Informa business
 GPS for Land Surveyors Fourth Edition Jan Van Sickle CRC Press Taylor & Francis Group Boca Raton London New York CRC Press is an imprint of the Taylor & Francis Croup, an Informa business Contents Preface
GPS for Land Surveyors Fourth Edition Jan Van Sickle CRC Press Taylor & Francis Group Boca Raton London New York CRC Press is an imprint of the Taylor & Francis Croup, an Informa business Contents Preface
Ionospheric Data Processing and Analysis
 Ionospheric Data Processing and Analysis Dr. Charles Carrano 1 Dr. Keith Groves 2 1 Boston College, Institute for Scientific Research 2 Air Force Research Laboratory, Space Vehicles Directorate Workshop
Ionospheric Data Processing and Analysis Dr. Charles Carrano 1 Dr. Keith Groves 2 1 Boston College, Institute for Scientific Research 2 Air Force Research Laboratory, Space Vehicles Directorate Workshop
Space Weather influence on satellite based navigation and precise positioning
 Space Weather influence on satellite based navigation and precise positioning R. Warnant, S. Lejeune, M. Bavier Royal Observatory of Belgium Avenue Circulaire, 3 B-1180 Brussels (Belgium) What this talk
Space Weather influence on satellite based navigation and precise positioning R. Warnant, S. Lejeune, M. Bavier Royal Observatory of Belgium Avenue Circulaire, 3 B-1180 Brussels (Belgium) What this talk
COMPARISON OF GPS COMMERCIAL SOFTWARE PACKAGES TO PROCESSING STATIC BASELINES UP TO 30 KM
 COMPARISON OF GPS COMMERCIAL SOFTWARE PACKAGES TO PROCESSING STATIC BASELINES UP TO 30 KM Khaled Mohamed Abdel Mageed Civil Engineering, Cairo, Egypt E-Mail: khaled_mgd@yahoo.com ABSTRACT The objective
COMPARISON OF GPS COMMERCIAL SOFTWARE PACKAGES TO PROCESSING STATIC BASELINES UP TO 30 KM Khaled Mohamed Abdel Mageed Civil Engineering, Cairo, Egypt E-Mail: khaled_mgd@yahoo.com ABSTRACT The objective
GNSS Surveying & Processing (A Surveyors Peek Behind the Curtain) Presented by Jeff Clark, PLS
 Presented by Jeff Clark, PLS") GNSS Surveying & Processing (A Surveyors Peek Behind the Curtain) Presented by Jeff Clark, PLS Global Positioning System (GPS) (GNSS) GPS is considered a passive system Passive in the sense that only the
GNSS Surveying & Processing (A Surveyors Peek Behind the Curtain) Presented by Jeff Clark, PLS Global Positioning System (GPS) (GNSS) GPS is considered a passive system Passive in the sense that only the
GLOBAL POSITIONING SYSTEMS. Knowing where and when
 GLOBAL POSITIONING SYSTEMS Knowing where and when Overview Continuous position fixes Worldwide coverage Latitude/Longitude/Height Centimeter accuracy Accurate time Feasibility studies begun in 1960 s.
GLOBAL POSITIONING SYSTEMS Knowing where and when Overview Continuous position fixes Worldwide coverage Latitude/Longitude/Height Centimeter accuracy Accurate time Feasibility studies begun in 1960 s.
GPS: History, Operation, Processing
 GPS: History, Operation, Processing Impor tant Dates 1970 s: conceived as radionavigation system for the US military: realtime locations with few-meter accuracy. 1978: first satellite launched 1983: Declared
GPS: History, Operation, Processing Impor tant Dates 1970 s: conceived as radionavigation system for the US military: realtime locations with few-meter accuracy. 1978: first satellite launched 1983: Declared
Appendix D Brief GPS Overview
 Appendix D Brief GPS Overview Global Positioning System (GPS) Theory What is GPS? The Global Positioning System (GPS) is a satellite-based navigation system, providing position information, accurate to
Appendix D Brief GPS Overview Global Positioning System (GPS) Theory What is GPS? The Global Positioning System (GPS) is a satellite-based navigation system, providing position information, accurate to
2 INTRODUCTION TO GNSS REFLECTOMERY
 2 INTRODUCTION TO GNSS REFLECTOMERY 2.1 Introduction The use of Global Navigation Satellite Systems (GNSS) signals reflected by the sea surface for altimetry applications was first suggested by Martín-Neira
2 INTRODUCTION TO GNSS REFLECTOMERY 2.1 Introduction The use of Global Navigation Satellite Systems (GNSS) signals reflected by the sea surface for altimetry applications was first suggested by Martín-Neira
AGPS Glossary: from Almanac to Zenith Delay
 AGPS Glossary: from Almanac to Zenith Delay Duncan Agnew As with any technically complicated system, GPS has many specialized terms and acronyms associated with it. Since a lot of these come from fields
AGPS Glossary: from Almanac to Zenith Delay Duncan Agnew As with any technically complicated system, GPS has many specialized terms and acronyms associated with it. Since a lot of these come from fields
Rec. ITU-R P RECOMMENDATION ITU-R P *
 Rec. ITU-R P.682-1 1 RECOMMENDATION ITU-R P.682-1 * PROPAGATION DATA REQUIRED FOR THE DESIGN OF EARTH-SPACE AERONAUTICAL MOBILE TELECOMMUNICATION SYSTEMS (Question ITU-R 207/3) Rec. 682-1 (1990-1992) The
Rec. ITU-R P.682-1 1 RECOMMENDATION ITU-R P.682-1 * PROPAGATION DATA REQUIRED FOR THE DESIGN OF EARTH-SPACE AERONAUTICAL MOBILE TELECOMMUNICATION SYSTEMS (Question ITU-R 207/3) Rec. 682-1 (1990-1992) The
Altimeter Range Corrections
 Altimeter Range Corrections Schematic Summary Corrections Altimeters Range Corrections Altimeter range corrections can be grouped as follows: Atmospheric Refraction Corrections Sea-State Bias Corrections
Altimeter Range Corrections Schematic Summary Corrections Altimeters Range Corrections Altimeter range corrections can be grouped as follows: Atmospheric Refraction Corrections Sea-State Bias Corrections
Multi-Constellation GNSS Precise Point Positioning using GPS, GLONASS and BeiDou in Australia
 International Global Navigation Satellite Systems Society IGNSS Symposium 2015 Multi-Constellation GNSS Precise Point Positioning using GPS, GLONASS and BeiDou in Australia Xiaodong Ren 1,Suelynn Choy
International Global Navigation Satellite Systems Society IGNSS Symposium 2015 Multi-Constellation GNSS Precise Point Positioning using GPS, GLONASS and BeiDou in Australia Xiaodong Ren 1,Suelynn Choy
CALIBRATING GNSS SATELLITE ANTENNA GROUP-DELAY VARIATIONS USING SPACE AND GROUND RECEIVERS
 IGS WORKSHOP 2014 CALIBRATING GNSS SATELLITE ANTENNA GROUP-DELAY VARIATIONS USING SPACE AND GROUND RECEIVERS June 23-27, 2014 - PASADENA, CALIFORNIA Plenary PY06: Infrastructure and Calibration David CALLE
IGS WORKSHOP 2014 CALIBRATING GNSS SATELLITE ANTENNA GROUP-DELAY VARIATIONS USING SPACE AND GROUND RECEIVERS June 23-27, 2014 - PASADENA, CALIFORNIA Plenary PY06: Infrastructure and Calibration David CALLE
Effects of Pseudolite Positioning on DOP in LAAS
 Positioning, 200,, 8-26 doi:0.4236/pos.200.003 Published Online November 200 (http://www.scirp.org/journal/pos) Quddusa Sultana, Dhiraj Sunehra 2, Vemuri Satya Srinivas, Achanta Dattatreya Sarma R & T
Positioning, 200,, 8-26 doi:0.4236/pos.200.003 Published Online November 200 (http://www.scirp.org/journal/pos) Quddusa Sultana, Dhiraj Sunehra 2, Vemuri Satya Srinivas, Achanta Dattatreya Sarma R & T
Combined global models of the ionosphere
 Combined global models of the ionosphere S. Todorova (1), T. Hobiger (2), H. Schuh (1) (1) Institute of Geodesy and Geophysics (IGG), Vienna University of Technology (2) Space-Time Standards Group, Kashima
Combined global models of the ionosphere S. Todorova (1), T. Hobiger (2), H. Schuh (1) (1) Institute of Geodesy and Geophysics (IGG), Vienna University of Technology (2) Space-Time Standards Group, Kashima
Study of small scale plasma irregularities. Đorđe Stevanović
 Study of small scale plasma irregularities in the ionosphere Đorđe Stevanović Overview 1. Global Navigation Satellite Systems 2. Space weather 3. Ionosphere and its effects 4. Case study a. Instruments
Study of small scale plasma irregularities in the ionosphere Đorđe Stevanović Overview 1. Global Navigation Satellite Systems 2. Space weather 3. Ionosphere and its effects 4. Case study a. Instruments
PRINCIPLES AND FUNCTIONING OF GPS/ DGPS /ETS ER A. K. ATABUDHI, ORSAC
 PRINCIPLES AND FUNCTIONING OF GPS/ DGPS /ETS ER A. K. ATABUDHI, ORSAC GPS GPS, which stands for Global Positioning System, is the only system today able to show you your exact position on the Earth anytime,
PRINCIPLES AND FUNCTIONING OF GPS/ DGPS /ETS ER A. K. ATABUDHI, ORSAC GPS GPS, which stands for Global Positioning System, is the only system today able to show you your exact position on the Earth anytime,
The GLOBAL POSITIONING SYSTEM James R. Clynch February 2006
 The GLOBAL POSITIONING SYSTEM James R. Clynch February 2006 I. Introduction What is GPS The Global Positioning System, or GPS, is a satellite based navigation system developed by the United States Defense
The GLOBAL POSITIONING SYSTEM James R. Clynch February 2006 I. Introduction What is GPS The Global Positioning System, or GPS, is a satellite based navigation system developed by the United States Defense