BURIED OBJECT SCANNING SONAR (BOSS)
|
|
|
- Loren Rose
- 5 years ago
- Views:
Transcription


 sampling rate of system: 44 khz Typical vehicle")
 with the BOSS-SAS system is shown in Figure 1 and the BOSS-SAS data processing approach is")
1 BURIED OBJECT SCANNING SONAR (BOSS) The BOSS-SAS (Buried Object Scanning Sonar-Synthetic Aperture Sonar) system is a bottom looking sonar used for the detection and imaging of bottom and buried targets. The system can generate 3-dimensional image maps. The BOSS-SAS system consists of two wings each having 20 hydrophones and an omni-directional transmitter. The element dimensions are.058 meters by 0.58 meters and equally spaced to provide a real aperture of one meter for each wing. The transmitter operating parameters are listed below: source level: 190 db rel to 1 upa frequency: 3-20 khz FM pulse pulse width: 2 or 5 msec ping rates: variable (but typically 10 pings per second or 20 pings per second) sampling rate of system: 44 khz Typical vehicle parameters when operating at sea are speeds of 2-3 knots at altitudes between 3 to 5 meters from the bottom. A Bluefin inch Unmanned Underwater Vehicle (UUV) with the BOSS-SAS system is shown in Figure 1 and the BOSS-SAS data processing approach is shown in Figure 2. Figure 1. Bluefin 12-inch UUV with BOSS-SAS system.


2 There are several target fields located throughout the NSWC, Panama City operational areas. During August 2005, field tests were conducted at the 10-meter deep sand target field in the St. Andrew s Bay OPAREA. This area is depicted by the larger square shown in Figure 2. Figure 2. Navigational chart showing the 3 and 10-meter deep sand target fields in the St. Andrew s Bay operational area. The 10-meter deep sand target field was populated with eleven targets that were buried at the time of deployment. Figure 3, shows some of the targets that were deployed in this field. Figure 3. Targets deployed in 10-meter sand field.

3 The initial layout of the field is depicted in Figure 4. The left most target/marker corresponds to the southwest corner of the field. The black circles show the surveyed locations of the targets after several months from deployment. Figure 4. Target layout.
4 A diver survey prior to the August 2005 field tests was also conducted. Table 1.0 provides the target offsets referenced to the southwest marker. The small target was not found during this survey. Table meter deep field target survey report. Referenced To SW Marker Along Track Range Off Centerline Range Feet Meters Feet Meters SW Marker Scale bomb-like object not found Small bomb west partially buried 18" 6' cylinder east partially buried 7" 5' cylinder west fully buried 6" deep 14" sphere east 5" diameter exposed large bullet-shaped object east? 14" sphere west 10" diameter exposed 6" 2' cylinder east? scale bullet-shaped object west fully buried NE Marker
5 The August 2005 field tests consisted of several calibration runs and several runs prosecuting the target field. An UUV run at a 5- meter height above the bottom with speeds of 2-3 knots was programmed and executed. The UUV tracks and the target locations from the last survey are shown in Figure 5. This figure also shows the tracks referenced to the BOSS data. Six sets of data were recorded. The BOSS data filename format is [surveyfield1{ar-fr}nnn.jsf], where {Ar-Fr} corresponds to the data set for the different legs of the run and NNN is incrementing file number. The BOSS data is message based, binary and data is stored in little endian format. The data set associated with {Dr}, a run from the northeast to the southwest, are not available because of an error during the transfer process Latitude Corresponding BOSS files: Ar, Br, Cr, Er, Fr itude Figure 5. Programmed runs and corresponding data sets.
6
7 BOSS DATA A BOSS data file consists of multiple messages. Each message has a 16-byte header that identifies the message and the number of bytes that follow the header in that message. The following tables provide the header, sub-header and message formats. A short Matlab program has been written to extract the message information from the BOSS data files. However, this program does not map the raw data messages to their respective hydrophones in the BOSS wing receivers. 16-Byte Header MATLAB Byte offset Purpose/Value Format Variable 0-3 Reserved msg_code 4-5 Message code Short 6-11 Reserved 3 shorts n_bytes Number of bytes in message long Message Code 4007: Pulse Information Messages The Pulse Information Message consists of a message header and the raw transmit waveform and received match filter. MATLAB Byte offset Purpose/Value Format Variable p_name Pulse filename Char rec_samprate Receive ADC sample rate in Hz Float32 txm_samprate Transmit DAC sample rate in Hz Float32 num_mfcoeff Number of match filter coefficients pulse_gain Pulse gain Float32 mfcoeff_ Zero based first coeff in MF forfft_size Forward FFT size of MF invfft_size Inverse FFT size recommended inv_samples Number of good samples in inverse num_txmsamp Transmit samples txmdelay_samp Transmit delay in samples maxping_rate Max Ping Rate Float Number of pulses 141 Number of MF 142 Number of VGA gain ramps 143 Number of pulse phases Reserved for future use txm_data 268+transmit Pulse Data Signed Short samples mfcoeff Rest of msg MF FFT coeff (real/imag pairs) Float32 Message Code 4021: BOSS 40 Channel Raw Data Message This message consists of a per ping header followed by 40 ADC data frames. An ADC data frame contains the ADC data for all channels for a given sample time.
8 MATLAB Variable Byte offset Purpose/Value Format Diagnostics ADC 0 Short Diagnostics ADC 1 Short Diagnostics ADC 2 Short Diagnostics ADC 3 Short Diagnostics ADC 4 Short Diagnostics ADC 5 Short Diagnostics ADC 6 Short Diagnostics ADC 7 Short Reserved time_ Time in units of seconds since tmil_ Milliseconds within the current second ping_num Ping Number rec_samp_ Sample rate in Hz Float Discard samples Event mark number Format of data: 0-BOSS 252 channel, 1-BOSS 40-channel, 2- BOSS 160-channel Reserved. 112-end ADC Data Frames (Raw Data) Short ADC Data Frame Format 1: BOSS 40-channel Reserved Options bit. If bit 6 is set then this is a special diagnostic data frame that should be ignored. The third sample in every ping should be a diagnostic frame Reserved. data ADC Channel Data. There are 40 short integer values in this array, one for each ADC converter/hydrophone in the system. Short Short Message Code 4023: Blue Fin AUV Message This message consists of a single NMEA string from the AUV. The formats are defined in the Blue Fin interface document. The string consists of a time stamp (acquisition time) and the NMEA string. MATLAB Byte offset Purpose/Value Format Variable nmea_time Time in units of seconds since nmea_tmil Milliseconds within the current second Reserved 28-end NMEA string Char
9 Message Code 4013: Estimated Pitch, Roll Yaw, Heading Message This message consists of a single reading set of pitch/roll/yaw. MATLAB Byte offset Purpose/Value Format Variable prd_time Time in units of seconds since prd_tmil Milliseconds within the current second Reserved pitch Pitch in degrees Float32 roll Roll in degrees Float32 yaw Yaw in degrees Float32 heading Heading in degrees Float Reserved There are two Matlab programs that will read the *.jsf files. The bossreaddata.m program will not only read the *.jsf data file but it will also correct for the XYZ location of the hydrophones. The *.jsf files contain many pings so one has to build a data array in order to perform any synthetic aperture array processing scheme. The reference layout of the hydrophones is shown in Figure 6. The mapping of the data array indices to the hydrophones in the ADC Channel data (message 4021) is as follows: Segment A, Hydrophones , 21, 3, 23, 5, 25, 7, 27, 9, 29, 11, 31, 13, 33, 15, 35, 17, 37, 19, 39 Segment H, Hydrophones , 22, 4, 24, 6, 26, 8, 28, 10, 30, 12, 32, 14, 34, 16, 36, 18, 38, 20, 40 When one ping is read, a data array {data ([1-40],:) }will be generated. The data from hydrophone H5, will be the data in the data array { data (6,:) }. The data from hydrophone A14 will be in the data array { data (33,:) }.
10 Port A20, A2, A1 Starboard H1, H2,..,H20 Figure 6. Hydrophone layout in the UUV wings. The BOSS SAS processing scheme is depicted in Figure 7. Employing the data into the equation for many spatial points, an image can be formed.

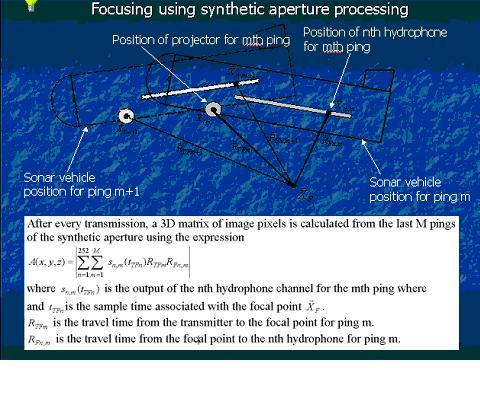
11 Figure 8. BOSS SAS processing scheme.
12 Listed below are some references associated with the BOSS systems. 1. Buried object scanning sonar, IEEE J. of Oceanic Eng., vol. 26, No. 4, October 2001, pp Sonar for Multi-Aspect Buried Mine Imaging, Proceedings, Oceans 2002, October Buried Object Scanning Sonar for AUVs, Proceedings, Oceans 2003, September 2003.
Generic Bathymetry Data - Interface Control Document
 Generic Bathymetry Data - Interface Control Document For WASSP Prepared by: Keith Fletcher Electronic Navigation Ltd October 15, 2013 Version 2.2 2013 by WASSP Ltd No part of this document should be reproduced
Generic Bathymetry Data - Interface Control Document For WASSP Prepared by: Keith Fletcher Electronic Navigation Ltd October 15, 2013 Version 2.2 2013 by WASSP Ltd No part of this document should be reproduced
SYSTEM 5900 SIDE SCAN SONAR
 SYSTEM 5900 SIDE SCAN SONAR HIGH-RESOLUTION, DYNAMICALLY FOCUSED, MULTI-BEAM SIDE SCAN SONAR Klein Marine System s 5900 sonar is the flagship in our exclusive family of multi-beam technology-based side
SYSTEM 5900 SIDE SCAN SONAR HIGH-RESOLUTION, DYNAMICALLY FOCUSED, MULTI-BEAM SIDE SCAN SONAR Klein Marine System s 5900 sonar is the flagship in our exclusive family of multi-beam technology-based side
Sonar Detection and Classification of Buried or Partially Buried Objects in Cluttered Environments Using UUVs
 Sonar Detection and Classification of Buried or Partially Buried Objects in Cluttered Environments Using UUVs Steven G. Schock Department of Ocean Engineering Florida Atlantic University Boca Raton, Fl.
Sonar Detection and Classification of Buried or Partially Buried Objects in Cluttered Environments Using UUVs Steven G. Schock Department of Ocean Engineering Florida Atlantic University Boca Raton, Fl.
MINE SEARCH MISSION PLANNING FOR HIGH DEFINITION SONAR SYSTEM - SELECTION OF SPACE IMAGING EQUIPMENT FOR A SMALL AUV DOROTA ŁUKASZEWICZ, LECH ROWIŃSKI
 MINE SEARCH MISSION PLANNING FOR HIGH DEFINITION SONAR SYSTEM - SELECTION OF SPACE IMAGING EQUIPMENT FOR A SMALL AUV DOROTA ŁUKASZEWICZ, LECH ROWIŃSKI Gdansk University of Technology Faculty of Ocean Engineering
MINE SEARCH MISSION PLANNING FOR HIGH DEFINITION SONAR SYSTEM - SELECTION OF SPACE IMAGING EQUIPMENT FOR A SMALL AUV DOROTA ŁUKASZEWICZ, LECH ROWIŃSKI Gdansk University of Technology Faculty of Ocean Engineering
Underwater Acoustic Communication and Modem-Based Navigation Aids
 Underwater Acoustic Communication and Modem-Based Navigation Aids Dale Green Teledyne Benthos 49 Edgerton Drive North Falmouth, MA 02556 USA Abstract. New forms of navigation aids for underwater vehicles
Underwater Acoustic Communication and Modem-Based Navigation Aids Dale Green Teledyne Benthos 49 Edgerton Drive North Falmouth, MA 02556 USA Abstract. New forms of navigation aids for underwater vehicles
Broadband Temporal Coherence Results From the June 2003 Panama City Coherence Experiments
 Broadband Temporal Coherence Results From the June 2003 Panama City Coherence Experiments H. Chandler*, E. Kennedy*, R. Meredith*, R. Goodman**, S. Stanic* *Code 7184, Naval Research Laboratory Stennis
Broadband Temporal Coherence Results From the June 2003 Panama City Coherence Experiments H. Chandler*, E. Kennedy*, R. Meredith*, R. Goodman**, S. Stanic* *Code 7184, Naval Research Laboratory Stennis
Quick start guide M3 Sonar
 Quick start guide M3 Sonar Creating an image mosaic using Photoshop and Geographic Imager 2013, Kongsberg Mesotech Ltd. 922-20007005 M3 Sonar Quick start guide Creating an image mosaic using Photoshop
Quick start guide M3 Sonar Creating an image mosaic using Photoshop and Geographic Imager 2013, Kongsberg Mesotech Ltd. 922-20007005 M3 Sonar Quick start guide Creating an image mosaic using Photoshop
SUB-SEABED MAPPING USING AUV-BASED MULTI-STATIC ACOUSTIC SENSING AND ADAPTIVE CONTROL
 SUB-SEABED MAPPING USING AUV-BASED MULTI-STATIC ACOUSTIC SENSING AND ADAPTIVE CONTROL H. SCHMIDT, J. LEONARD, J.R. EDWARDS AND T-C. LIU Massachusetts Institute of Technology, 77 Massachusetts Avenue, Cambridge
SUB-SEABED MAPPING USING AUV-BASED MULTI-STATIC ACOUSTIC SENSING AND ADAPTIVE CONTROL H. SCHMIDT, J. LEONARD, J.R. EDWARDS AND T-C. LIU Massachusetts Institute of Technology, 77 Massachusetts Avenue, Cambridge
Under Water Systems. Sidescan SAS image mapping for Automatic Detection and Classification
 0 Sidescan SAS image mapping for Automatic Detection and Classification Plan Sidescan SAS image mapping for ADC Sidescan Synthetic Aperture Sonar Images Interest of SAS for automatic detection and classification
0 Sidescan SAS image mapping for Automatic Detection and Classification Plan Sidescan SAS image mapping for ADC Sidescan Synthetic Aperture Sonar Images Interest of SAS for automatic detection and classification
MUNITIONS DETECTION USING UNMANNED UNDERWATER VEHICLES EQUIPPED WITH ADVANCED SENSORS INTERIM REPORT
 MUNITIONS DETECTION USING UNMANNED UNDERWATER VEHICLES EQUIPPED WITH ADVANCED SENSORS INTERIM REPORT Project Number MR-201103 29 June 2012 Ver. 7a Mr. Robert A. Leasko Unmanned Systems Technology Branch,
MUNITIONS DETECTION USING UNMANNED UNDERWATER VEHICLES EQUIPPED WITH ADVANCED SENSORS INTERIM REPORT Project Number MR-201103 29 June 2012 Ver. 7a Mr. Robert A. Leasko Unmanned Systems Technology Branch,
Teledyne Marine Acoustic Imagining
 RESON SeaBat high performance sonars for long range object detection and MCM applications Navigation, object avoidance & up close inspection with BlueView Greg Probst Sales Manager, Defense Teledyne Marine
RESON SeaBat high performance sonars for long range object detection and MCM applications Navigation, object avoidance & up close inspection with BlueView Greg Probst Sales Manager, Defense Teledyne Marine
Multi-Band Acoustic Modem for the Communications and Navigation Aid AUV
 Multi-Band Acoustic Modem for the Communications and Navigation Aid AUV Lee E. Freitag, Matthew Grund, Jim Partan, Keenan Ball, Sandipa Singh, Peter Koski Woods Hole Oceanographic Institution Woods Hole,
Multi-Band Acoustic Modem for the Communications and Navigation Aid AUV Lee E. Freitag, Matthew Grund, Jim Partan, Keenan Ball, Sandipa Singh, Peter Koski Woods Hole Oceanographic Institution Woods Hole,
A 3D, FORWARD-LOOKING, PHASED ARRAY, OBSTACLE AVOIDANCE SONAR FOR AUTONOMOUS UNDERWATER VEHICLES
 A 3D, FORWARD-LOOKING, PHASED ARRAY, OBSTACLE AVOIDANCE SONAR FOR AUTONOMOUS UNDERWATER VEHICLES Matthew J. Zimmerman Vice President of Engineering FarSounder, Inc. 95 Hathaway Center, Providence, RI 02907
A 3D, FORWARD-LOOKING, PHASED ARRAY, OBSTACLE AVOIDANCE SONAR FOR AUTONOMOUS UNDERWATER VEHICLES Matthew J. Zimmerman Vice President of Engineering FarSounder, Inc. 95 Hathaway Center, Providence, RI 02907
Positioning Small AUVs for Deeper Water Surveys Using Inverted USBL
 Positioning Small AUVs for Deeper Water Surveys Using Inverted USBL Presented at Hydro12, Rotterdam, November 2012 Dr. T.M. Hiller, thiller@teledyne.com Overview Introduction to Gavia AUV Gavia Acoustic
Positioning Small AUVs for Deeper Water Surveys Using Inverted USBL Presented at Hydro12, Rotterdam, November 2012 Dr. T.M. Hiller, thiller@teledyne.com Overview Introduction to Gavia AUV Gavia Acoustic
Results from a Small Synthetic Aperture Sonar
 Results from a Small Synthetic Aperture Sonar Daniel Brown, Daniel Cook, Jose Fernandez Naval Surface Warfare Center - Panama City Code HS11 11 Vernon Avenue Panama City, FL 3247-71 Abstract A Synthetic
Results from a Small Synthetic Aperture Sonar Daniel Brown, Daniel Cook, Jose Fernandez Naval Surface Warfare Center - Panama City Code HS11 11 Vernon Avenue Panama City, FL 3247-71 Abstract A Synthetic
Low Frequency Coherent Source Sonobuoy
 Low Frequency Coherent Source Sonobuoy Active Source The Low Frequency Coherent Source (LFCS) is NATO, A-size sonobuoy manufactured by STS for use as a source in a multi-static field. The LFCS is capable
Low Frequency Coherent Source Sonobuoy Active Source The Low Frequency Coherent Source (LFCS) is NATO, A-size sonobuoy manufactured by STS for use as a source in a multi-static field. The LFCS is capable
Autonomous Underwater Platforms1
 A Digital Thin Line Towed Array for Small Autonomous Underwater Platforms1 V. Pallayil, M.A Chitre and P.D Deshpande Acoustic Research Laboratory Tropical Marine Science Institute National University of
A Digital Thin Line Towed Array for Small Autonomous Underwater Platforms1 V. Pallayil, M.A Chitre and P.D Deshpande Acoustic Research Laboratory Tropical Marine Science Institute National University of
Data Acquisition and Processing of a Distributed 3D Induced Polarisation Imaging system
 Data Acquisition and Processing of a Distributed 3D Induced Polarisation Imaging system J Bernard, IRIS Instruments, France IP Workshop W3: IP processing and QC - from amps in the ground to an Inversion
Data Acquisition and Processing of a Distributed 3D Induced Polarisation Imaging system J Bernard, IRIS Instruments, France IP Workshop W3: IP processing and QC - from amps in the ground to an Inversion
SWAMSI: Bistatic CSAS and Target Echo Studies
 SWAMSI: Bistatic CSAS and Target Echo Studies Kent Scarbrough Advanced Technology Laboratory Applied Research Laboratories The University of Texas at Austin P.O. Box 8029 Austin, TX 78713-8029 phone: (512)
SWAMSI: Bistatic CSAS and Target Echo Studies Kent Scarbrough Advanced Technology Laboratory Applied Research Laboratories The University of Texas at Austin P.O. Box 8029 Austin, TX 78713-8029 phone: (512)
Ongoing Developments in Side Scan Sonar The pursuit of better Range, Resolution and Speed
 Ongoing Developments in Side Scan Sonar The pursuit of better Range, Resolution and Speed Nick Lawrence EdgeTech Advances in Seafloor-mapping Sonar Conference 30 th November 2009 Company Profile EdgeTech
Ongoing Developments in Side Scan Sonar The pursuit of better Range, Resolution and Speed Nick Lawrence EdgeTech Advances in Seafloor-mapping Sonar Conference 30 th November 2009 Company Profile EdgeTech
Modeling and Evaluation of Bi-Static Tracking In Very Shallow Water
 Modeling and Evaluation of Bi-Static Tracking In Very Shallow Water Stewart A.L. Glegg Dept. of Ocean Engineering Florida Atlantic University Boca Raton, FL 33431 Tel: (954) 924 7241 Fax: (954) 924-7270
Modeling and Evaluation of Bi-Static Tracking In Very Shallow Water Stewart A.L. Glegg Dept. of Ocean Engineering Florida Atlantic University Boca Raton, FL 33431 Tel: (954) 924 7241 Fax: (954) 924-7270
AUVFEST 05 Quick Look Report of NPS Activities
 AUVFEST 5 Quick Look Report of NPS Activities Center for AUV Research Naval Postgraduate School Monterey, CA 93943 INTRODUCTION Healey, A. J., Horner, D. P., Kragelund, S., Wring, B., During the period
AUVFEST 5 Quick Look Report of NPS Activities Center for AUV Research Naval Postgraduate School Monterey, CA 93943 INTRODUCTION Healey, A. J., Horner, D. P., Kragelund, S., Wring, B., During the period
KONGSBERG seafloor-mapping echosounders
 KONGSBERG seafloor-mapping echosounders Berit Horvei WORLD CLASS through people, technology and dedication AGENDA Historical overview EM series Multibeam echosounder and Subbottom profiler Topside software.
KONGSBERG seafloor-mapping echosounders Berit Horvei WORLD CLASS through people, technology and dedication AGENDA Historical overview EM series Multibeam echosounder and Subbottom profiler Topside software.
INTERFACE CONTROL DOCUMENT
 RESON SeaBat 7k DATA FORMAT INTERFACE CONTROL DOCUMENT Version 0.50 (Preliminary ) Volume I Approval Notice The information contained in this document is subject to change without notice. RESON makes no
RESON SeaBat 7k DATA FORMAT INTERFACE CONTROL DOCUMENT Version 0.50 (Preliminary ) Volume I Approval Notice The information contained in this document is subject to change without notice. RESON makes no
Observations of the deep-water mid-frequency ambient noise spatial structure and temporal fluctuation characteristics.
 Mid-Frequency Ambient Noise Experiment 4-21 August 2018 Objective Observations of the deep-water mid-frequency ambient noise spatial structure and temporal fluctuation characteristics. Background The 2D
Mid-Frequency Ambient Noise Experiment 4-21 August 2018 Objective Observations of the deep-water mid-frequency ambient noise spatial structure and temporal fluctuation characteristics. Background The 2D
PING))) Ultrasonic Distance Sensor (#28015)
)) Ultrasonic Distance Sensor (#28015)") 599 Menlo Drive, Suite 100 Rocklin, California 95765, USA Office: (916) 624-8333 Fax: (916) 624-8003 General: info@parallax.com Technical: support@parallax.com Web Site: www.parallax.com Educational: www.stampsinclass.com
599 Menlo Drive, Suite 100 Rocklin, California 95765, USA Office: (916) 624-8333 Fax: (916) 624-8003 General: info@parallax.com Technical: support@parallax.com Web Site: www.parallax.com Educational: www.stampsinclass.com
Three-dimensional investigation of buried structures with multi-transducer parametric sub-bottom profiler as part of hydrographical applications
 Three-dimensional investigation of buried structures with multi-transducer parametric sub-bottom profiler as part Jens LOWAG, Germany, Dr. Jens WUNDERLICH, Germany, Peter HUEMBS, Germany Key words: parametric,
Three-dimensional investigation of buried structures with multi-transducer parametric sub-bottom profiler as part Jens LOWAG, Germany, Dr. Jens WUNDERLICH, Germany, Peter HUEMBS, Germany Key words: parametric,
APN-0046: Configure CAN for SPAN
 APN-0046: Configure CAN for SPAN Page 1 March 11, 2015 Configure CAN for SPAN This application note provides general guidance on how to configure the Controller Area Network (CAN) interface for NovAtel
APN-0046: Configure CAN for SPAN Page 1 March 11, 2015 Configure CAN for SPAN This application note provides general guidance on how to configure the Controller Area Network (CAN) interface for NovAtel
Amateur Station Control Protocol (ASCP) Ver Oct. 5, 2002
 Ver Oct. 5, 2002") Amateur Station Control Protocol (ASCP) Ver. 0.17 Oct. 5, 2002 Moe Wheatley, AE4JY Table of Contents 1. Purpose...4 2. Basic Protocol Concepts...5 3. Message Block Format...8 3.1. Detailed Description
Amateur Station Control Protocol (ASCP) Ver. 0.17 Oct. 5, 2002 Moe Wheatley, AE4JY Table of Contents 1. Purpose...4 2. Basic Protocol Concepts...5 3. Message Block Format...8 3.1. Detailed Description
HIGH RESOLUTION MULTI-BEAM SIDE LOOKING SONAR ANDRZEJ ELMINOWICZ, LEONARD ZAJĄCZKOWSKI
 HIGH RESOLUTION MULTI-BEAM SIDE LOOKING SONAR ANDRZEJ ELMINOWICZ, LEONARD ZAJĄCZKOWSKI R&D Marine Technology Centre Dickmana 62, 81-109 Gdynia, POLAND email: andrzeje@ctm.gdynia.pl The conventional side
HIGH RESOLUTION MULTI-BEAM SIDE LOOKING SONAR ANDRZEJ ELMINOWICZ, LEONARD ZAJĄCZKOWSKI R&D Marine Technology Centre Dickmana 62, 81-109 Gdynia, POLAND email: andrzeje@ctm.gdynia.pl The conventional side
THE NASA/JPL AIRBORNE SYNTHETIC APERTURE RADAR SYSTEM. Yunling Lou, Yunjin Kim, and Jakob van Zyl
 THE NASA/JPL AIRBORNE SYNTHETIC APERTURE RADAR SYSTEM Yunling Lou, Yunjin Kim, and Jakob van Zyl Jet Propulsion Laboratory California Institute of Technology 4800 Oak Grove Drive, MS 300-243 Pasadena,
THE NASA/JPL AIRBORNE SYNTHETIC APERTURE RADAR SYSTEM Yunling Lou, Yunjin Kim, and Jakob van Zyl Jet Propulsion Laboratory California Institute of Technology 4800 Oak Grove Drive, MS 300-243 Pasadena,
Detection of Obscured Targets: Signal Processing
 Detection of Obscured Targets: Signal Processing James McClellan and Waymond R. Scott, Jr. School of Electrical and Computer Engineering Georgia Institute of Technology Atlanta, GA 30332-0250 jim.mcclellan@ece.gatech.edu
Detection of Obscured Targets: Signal Processing James McClellan and Waymond R. Scott, Jr. School of Electrical and Computer Engineering Georgia Institute of Technology Atlanta, GA 30332-0250 jim.mcclellan@ece.gatech.edu
Demonstration of the Real-Time Tracking Gradiometer for Buried Mine Hunting While Operating From a Small Unmanned Underwater Vehicle
 Demonstration of the Real-Time Tracking Gradiometer for Buried Mine Hunting While Operating From a Small Unmanned Underwater Vehicle G. Sulzberger a, J. Bono a, G.I. Allen a, T. Clem a, S. Kumar b a Naval
Demonstration of the Real-Time Tracking Gradiometer for Buried Mine Hunting While Operating From a Small Unmanned Underwater Vehicle G. Sulzberger a, J. Bono a, G.I. Allen a, T. Clem a, S. Kumar b a Naval
Synthetic Aperture Sonar (SAS) and Acoustic Templates for the Detection and Classification of Underwater Munitions
 and Acoustic Templates for the Detection and Classification of Underwater Munitions") 1 Synthetic Aperture Sonar (SAS) and Acoustic Templates for the Detection and Classification of Underwater Munitions Steven G. Kargl, Kevin L. Williams, Aubrey L. España Applied Physics Laboratory University
1 Synthetic Aperture Sonar (SAS) and Acoustic Templates for the Detection and Classification of Underwater Munitions Steven G. Kargl, Kevin L. Williams, Aubrey L. España Applied Physics Laboratory University
Meridian Pipeline Survey
 Meridian Pipeline Survey Massachusetts Bay, Boston, MA 5 August 2013 1 Table of Contents Section 1: Mission Overview... 3 Vehicle General Information:... 3 Mission Report:... 3 Area of Operation:... 3
Meridian Pipeline Survey Massachusetts Bay, Boston, MA 5 August 2013 1 Table of Contents Section 1: Mission Overview... 3 Vehicle General Information:... 3 Mission Report:... 3 Area of Operation:... 3
Simrad SX90 Long range high definition sonar system
 Simrad SX90 Long range high definition sonar system 360 omnidirectional sonar 90 vertical tip mode 20 to 30 KHz operational frequency Narrow beams Selectable beam width Hyperbolic FM Large dynamic range
Simrad SX90 Long range high definition sonar system 360 omnidirectional sonar 90 vertical tip mode 20 to 30 KHz operational frequency Narrow beams Selectable beam width Hyperbolic FM Large dynamic range
Reverberation, Sediment Acoustics, and Targets-in-the-Environment
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Reverberation, Sediment Acoustics, and Targets-in-the-Environment Kevin L. Williams Applied Physics Laboratory College
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Reverberation, Sediment Acoustics, and Targets-in-the-Environment Kevin L. Williams Applied Physics Laboratory College
DATA FORMAT DEFINITION DOCUMENT
 Document Number: 11542 Rev: C Reson, Inc. Goleta, CA 93117 Document Title: DATA FORMAT DEFINITION DOCUMENT SeaBat 7k Data Format, Volume I Notice of Proprietary Rights The contents of this document are
Document Number: 11542 Rev: C Reson, Inc. Goleta, CA 93117 Document Title: DATA FORMAT DEFINITION DOCUMENT SeaBat 7k Data Format, Volume I Notice of Proprietary Rights The contents of this document are
SIGNAL PROCESSING ALGORITHMS FOR HIGH-PRECISION NAVIGATION AND GUIDANCE FOR UNDERWATER AUTONOMOUS SENSING SYSTEMS
 SIGNAL PROCESSING ALGORITHMS FOR HIGH-PRECISION NAVIGATION AND GUIDANCE FOR UNDERWATER AUTONOMOUS SENSING SYSTEMS Daniel Doonan, Chris Utley, and Hua Lee Imaging Systems Laboratory Department of Electrical
SIGNAL PROCESSING ALGORITHMS FOR HIGH-PRECISION NAVIGATION AND GUIDANCE FOR UNDERWATER AUTONOMOUS SENSING SYSTEMS Daniel Doonan, Chris Utley, and Hua Lee Imaging Systems Laboratory Department of Electrical
THE USE OF THE SOFTWARE COMMUNICATIONS ARCHITECTURE (SCA) FOR SONAR AND UNDERWATER COMMUNICATION APPLICATIONS
 FOR SONAR AND UNDERWATER COMMUNICATION APPLICATIONS") THE USE OF THE SOFTWARE COMMUNICATIONS ARCHITECTURE (SCA) FOR SONAR AND UNDERWATER COMMUNICATION APPLICATIONS Emma Jones (SEA Group Ltd, Bath, UK. emma.jones@sea.co.uk) ABSTRACT The Communications Architecture
THE USE OF THE SOFTWARE COMMUNICATIONS ARCHITECTURE (SCA) FOR SONAR AND UNDERWATER COMMUNICATION APPLICATIONS Emma Jones (SEA Group Ltd, Bath, UK. emma.jones@sea.co.uk) ABSTRACT The Communications Architecture
Agenda. Tuesday, 16 March (all times approximate!) Workshop logistics Workshop goals Brief background on SAX99 and SAX04
 Workshop logistics Workshop goals Brief background on SAX99 and SAX04") Agenda Tuesday, 16 March 0900-1000 (all times approximate!) Workshop logistics Workshop goals Brief background on SAX99 and SAX04 1000, break, room will be divided 1015, resume as two groups Agenda for
Agenda Tuesday, 16 March 0900-1000 (all times approximate!) Workshop logistics Workshop goals Brief background on SAX99 and SAX04 1000, break, room will be divided 1015, resume as two groups Agenda for
A Shallow Water Acoustic Network for Mine Countermeasures Operations with Autonomous Underwater Vehicles
 A Shallow Water Acoustic Network for Mine Countermeasures Operations with Autonomous Underwater Vehicles Lee Freitag, Matthew Grund, Chris von Alt, Roger Stokey and Thomas Austin Woods Hole Oceanographic
A Shallow Water Acoustic Network for Mine Countermeasures Operations with Autonomous Underwater Vehicles Lee Freitag, Matthew Grund, Chris von Alt, Roger Stokey and Thomas Austin Woods Hole Oceanographic
1 Introduction integrated 3D sonar system for underwater inspection applications
 1 Introduction The Underwater Inspection System (UIS TM ) is an integrated 3D sonar system for underwater inspection applications, specifically port and harbor construction, maintenance, port expansion,
1 Introduction The Underwater Inspection System (UIS TM ) is an integrated 3D sonar system for underwater inspection applications, specifically port and harbor construction, maintenance, port expansion,
Experiences with Hydrographic Data Budgets Using a Low-logistics AUV Platform. Thomas Hiller Teledyne Marine Systems
 Experiences with Hydrographic Data Budgets Using a Low-logistics AUV Platform Thomas Hiller Teledyne Marine Systems 1 Teledyne Marine Systems Strategic Business Units 2 What is the Gavia? The Gavia is
Experiences with Hydrographic Data Budgets Using a Low-logistics AUV Platform Thomas Hiller Teledyne Marine Systems 1 Teledyne Marine Systems Strategic Business Units 2 What is the Gavia? The Gavia is
Geometric Dilution of Precision of HF Radar Data in 2+ Station Networks. Heather Rae Riddles May 2, 2003
 Geometric Dilution of Precision of HF Radar Data in + Station Networks Heather Rae Riddles May, 003 Introduction The goal of this Directed Independent Study (DIS) is to provide a basic understanding of
Geometric Dilution of Precision of HF Radar Data in + Station Networks Heather Rae Riddles May, 003 Introduction The goal of this Directed Independent Study (DIS) is to provide a basic understanding of
Performance assessment of the MUSCLE synthetic aperture sonar
 SCIENCE AND TECHNOLOGY ORGANIZATION CENTRE FOR MARITIME RESEARCH AND EXPERIMENTATION Reprint Series Performance assessment of the MUSCLE synthetic aperture sonar Michel Couillard, Johannes Groen, Warren
SCIENCE AND TECHNOLOGY ORGANIZATION CENTRE FOR MARITIME RESEARCH AND EXPERIMENTATION Reprint Series Performance assessment of the MUSCLE synthetic aperture sonar Michel Couillard, Johannes Groen, Warren
Development of a Synchronous High-Speed Acoustic Communication and Navigation System for Unmanned Underwater Vehicles
 Development of a Synchronous High-Speed Acoustic Communication and Navigation System for Unmanned Underwater Vehicles Dr. Pierre-Philippe Beaujean Florida Atlantic University SeaTech 101 N. Beach Road,
Development of a Synchronous High-Speed Acoustic Communication and Navigation System for Unmanned Underwater Vehicles Dr. Pierre-Philippe Beaujean Florida Atlantic University SeaTech 101 N. Beach Road,
SOPA version 2. Revised July SOPA project. September 21, Introduction 2. 2 Basic concept 3. 3 Capturing spatial audio 4
 SOPA version 2 Revised July 7 2014 SOPA project September 21, 2014 Contents 1 Introduction 2 2 Basic concept 3 3 Capturing spatial audio 4 4 Sphere around your head 5 5 Reproduction 7 5.1 Binaural reproduction......................
SOPA version 2 Revised July 7 2014 SOPA project September 21, 2014 Contents 1 Introduction 2 2 Basic concept 3 3 Capturing spatial audio 4 4 Sphere around your head 5 5 Reproduction 7 5.1 Binaural reproduction......................
Sonar advancements for coastal and maritime surveys
 ConférenceMéditerranéenneCôtièreetMaritime EDITION1,HAMMAMET,TUNISIE(2009) CoastalandMaritimeMediterraneanConference Disponibleenligne http://www.paralia.fr Availableonline Sonar advancements for coastal
ConférenceMéditerranéenneCôtièreetMaritime EDITION1,HAMMAMET,TUNISIE(2009) CoastalandMaritimeMediterraneanConference Disponibleenligne http://www.paralia.fr Availableonline Sonar advancements for coastal
Side-Scan Sonar Presentation STS
 Training Module Side-Scan Sonar Presentation STS SIDE-SCAN SONAR SAFETY Training Module Content: This module includes information on: Types of Side-Scan Benefits and Disadvantages System Configuration
Training Module Side-Scan Sonar Presentation STS SIDE-SCAN SONAR SAFETY Training Module Content: This module includes information on: Types of Side-Scan Benefits and Disadvantages System Configuration
Experimental Validation of the Moving Long Base-Line Navigation Concept
 Experimental Validation of the Moving Long Base-Line Navigation Concept Jérôme Vaganay (1), John J. Leonard (2), Joseph A. Curcio (2), J. Scott Willcox (1) (1) Bluefin Robotics Corporation 237 Putnam Avenue
Experimental Validation of the Moving Long Base-Line Navigation Concept Jérôme Vaganay (1), John J. Leonard (2), Joseph A. Curcio (2), J. Scott Willcox (1) (1) Bluefin Robotics Corporation 237 Putnam Avenue
Pipeline Inspection and Environmental Monitoring Using AUVs
 Pipeline Inspection and Environmental Monitoring Using AUVs Bjørn Jalving, Bjørn Gjelstad, Kongsberg Maritime AUV Workshop, IRIS Biomiljø, 7 8 September 2011 WORLD CLASS through people, technology and
Pipeline Inspection and Environmental Monitoring Using AUVs Bjørn Jalving, Bjørn Gjelstad, Kongsberg Maritime AUV Workshop, IRIS Biomiljø, 7 8 September 2011 WORLD CLASS through people, technology and
SIS-1624 Dual Frequency Side Scan
 The Teledyne Benthos SIS-1624 Series Side Scan Sonar is a fully integrated system that uses advanced Chirp and Continuous Wave (CW) technologies, dual frequency and an advanced highspeed communication
The Teledyne Benthos SIS-1624 Series Side Scan Sonar is a fully integrated system that uses advanced Chirp and Continuous Wave (CW) technologies, dual frequency and an advanced highspeed communication
Time Reversal Ocean Acoustic Experiments At 3.5 khz: Applications To Active Sonar And Undersea Communications
 Time Reversal Ocean Acoustic Experiments At 3.5 khz: Applications To Active Sonar And Undersea Communications Heechun Song, P. Roux, T. Akal, G. Edelmann, W. Higley, W.S. Hodgkiss, W.A. Kuperman, K. Raghukumar,
Time Reversal Ocean Acoustic Experiments At 3.5 khz: Applications To Active Sonar And Undersea Communications Heechun Song, P. Roux, T. Akal, G. Edelmann, W. Higley, W.S. Hodgkiss, W.A. Kuperman, K. Raghukumar,
1 V NAME. Clock Pulse. Unipolar NRZ NRZ AMI NRZ HDB3
 NAME ES 442 Homework #9 (Spring 208 Due May 7, 208 ) Print out homework and do work on the printed pages.. Problem High Density Bipolar 3 (HDB3) (20 points) HDB3 is a line code developed to avoid long
NAME ES 442 Homework #9 (Spring 208 Due May 7, 208 ) Print out homework and do work on the printed pages.. Problem High Density Bipolar 3 (HDB3) (20 points) HDB3 is a line code developed to avoid long
GAJET, a DRDC Evaluation Testbed for Navigation Electronic Warfare. Michel Clénet
 GAJET, a DRDC Evaluation Testbed for Navigation Electronic Warfare Michel Clénet Outline Introduction CRPA project at DRDC Ottawa GAJET: An Evaluation Test bed for GPS Anti-Jam System An AJ simulation
GAJET, a DRDC Evaluation Testbed for Navigation Electronic Warfare Michel Clénet Outline Introduction CRPA project at DRDC Ottawa GAJET: An Evaluation Test bed for GPS Anti-Jam System An AJ simulation
Multi-Beam Echo Sounders do beam width, frequency, number of beams matter? James Williams Managing Director
 Multi-Beam Echo Sounders do beam width, frequency, number of beams matter? James Williams Managing Director 1 Swathe Services We offer Product Sales, Equipment Rental and Personnel Deployment Our latest
Multi-Beam Echo Sounders do beam width, frequency, number of beams matter? James Williams Managing Director 1 Swathe Services We offer Product Sales, Equipment Rental and Personnel Deployment Our latest
Shallow Water Array Performance (SWAP): Array Element Localization and Performance Characterization
: Array Element Localization and Performance Characterization") Shallow Water Array Performance (SWAP): Array Element Localization and Performance Characterization Kent Scarbrough Advanced Technology Laboratory Applied Research Laboratories The University of Texas
Shallow Water Array Performance (SWAP): Array Element Localization and Performance Characterization Kent Scarbrough Advanced Technology Laboratory Applied Research Laboratories The University of Texas
Chapter 2 Analog-to-Digital Conversion...
 Chapter... 5 This chapter examines general considerations for analog-to-digital converter (ADC) measurements. Discussed are the four basic ADC types, providing a general description of each while comparing
Chapter... 5 This chapter examines general considerations for analog-to-digital converter (ADC) measurements. Discussed are the four basic ADC types, providing a general description of each while comparing
Key Modules For Your Success SKYTRAQ. GPS Module MG-ST1315. UUser s Manual Ver 展得國際有限公司
 SKYTRAQ GPS Module MG-ST1315 UUser s Manual Ver 1.01 1. IntroductionT 1.1 Overview Modulestek GPS module MG-ST1315 is a high sensitivity, low power consumption; compact size GPS module designed for a broad
SKYTRAQ GPS Module MG-ST1315 UUser s Manual Ver 1.01 1. IntroductionT 1.1 Overview Modulestek GPS module MG-ST1315 is a high sensitivity, low power consumption; compact size GPS module designed for a broad
08/10/2013. Marine Positioning Systems Surface and Underwater Positioning. egm502 seafloor mapping
 egm502 seafloor mapping lecture 8 navigation and positioning Marine Positioning Systems Surface and Underwater Positioning All observations at sea need to be related to a geographical position. To precisely
egm502 seafloor mapping lecture 8 navigation and positioning Marine Positioning Systems Surface and Underwater Positioning All observations at sea need to be related to a geographical position. To precisely
Gradiometers for UXO Detection. Alan Cameron GSE Rentals
 Gradiometers for UXO Detection Alan Cameron GSE Rentals Traditional Detection Methods. Pulse Induced Metal Detector Towed Magnetometer Pulse Induction Sensors Pro s Will detect any conducting metal Con
Gradiometers for UXO Detection Alan Cameron GSE Rentals Traditional Detection Methods. Pulse Induced Metal Detector Towed Magnetometer Pulse Induction Sensors Pro s Will detect any conducting metal Con
Doppler Effect in the Underwater Acoustic Ultra Low Frequency Band
 Doppler Effect in the Underwater Acoustic Ultra Low Frequency Band Abdel-Mehsen Ahmad, Michel Barbeau, Joaquin Garcia-Alfaro 3, Jamil Kassem, Evangelos Kranakis, and Steven Porretta School of Engineering,
Doppler Effect in the Underwater Acoustic Ultra Low Frequency Band Abdel-Mehsen Ahmad, Michel Barbeau, Joaquin Garcia-Alfaro 3, Jamil Kassem, Evangelos Kranakis, and Steven Porretta School of Engineering,
3. Sound source location by difference of phase, on a hydrophone array with small dimensions. Abstract
 3. Sound source location by difference of phase, on a hydrophone array with small dimensions. Abstract A method for localizing calling animals was tested at the Research and Education Center "Dolphins
3. Sound source location by difference of phase, on a hydrophone array with small dimensions. Abstract A method for localizing calling animals was tested at the Research and Education Center "Dolphins
Multistatic, Concurrent Detection, Classification and Localization Concepts for Autonomous, Shallow Water Mine Counter Measures
 Multistatic, Concurrent Detection, Classification and Localization Concepts for Autonomous, Shallow Water Mine Counter Measures PI: Henrik Schmidt Massachusetts Institute of Technology 77 Massachusetts
Multistatic, Concurrent Detection, Classification and Localization Concepts for Autonomous, Shallow Water Mine Counter Measures PI: Henrik Schmidt Massachusetts Institute of Technology 77 Massachusetts
arxiv: v1 [astro-ph.im] 23 Nov 2018
![arxiv: v1 [astro-ph.im] 23 Nov 2018](/thumbs/91/104518967.jpg "arxiv: v1 [astro-ph.im] 23 Nov 2018") arxiv:8.9523v [astro-ph.im] 23 Nov 28 Hydrophone characterization for the KM3NeT experiment Rasa Muller,3,, Sander von Benda-Beckmann 2, Ed Doppenberg, Robert Lahmann 4, and Ernst-Jan Buis on behalf of
arxiv:8.9523v [astro-ph.im] 23 Nov 28 Hydrophone characterization for the KM3NeT experiment Rasa Muller,3,, Sander von Benda-Beckmann 2, Ed Doppenberg, Robert Lahmann 4, and Ernst-Jan Buis on behalf of
DEVICE CONFIGURATION INSTRUCTIONS. WinFrog Device Group:
 WinFrog Device Group: Device Name/Model: Device Manufacturer: Device Data String(s) Output to WinFrog: WinFrog Data String(s) Output to Device: WinFrog Data Item(s) and their RAW record: GPS NMEA GPS (Sercel)
WinFrog Device Group: Device Name/Model: Device Manufacturer: Device Data String(s) Output to WinFrog: WinFrog Data String(s) Output to Device: WinFrog Data Item(s) and their RAW record: GPS NMEA GPS (Sercel)
Acoustic Communications and Navigation for Mobile Under-Ice Sensors
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Acoustic Communications and Navigation for Mobile Under-Ice Sensors Lee Freitag Applied Ocean Physics and Engineering 266
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Acoustic Communications and Navigation for Mobile Under-Ice Sensors Lee Freitag Applied Ocean Physics and Engineering 266
Survey Sensors. 18/04/2018 Danny Wake Group Surveyor i-tech Services
 Survey Sensors 18/04/2018 Danny Wake Group Surveyor i-tech Services What do we need sensors for? For pure hydrographic surveying: Depth measurements Hazard identification Seabed composition Tides & currents
Survey Sensors 18/04/2018 Danny Wake Group Surveyor i-tech Services What do we need sensors for? For pure hydrographic surveying: Depth measurements Hazard identification Seabed composition Tides & currents
Long Range Acoustic Communications Experiment 2010
 Long Range Acoustic Communications Experiment 2010 Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA 92093-0701 6 September 2010 Objectives Experimentally confirm that robust
Long Range Acoustic Communications Experiment 2010 Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA 92093-0701 6 September 2010 Objectives Experimentally confirm that robust
Experimental results of a 300 khz shallow water synthetic aperture sonar
 Reprint Series Experimental results of a 300 khz shallow water synthetic aperture sonar Andrea Bellettini, Marc Pinto, Benjamin Evans November 2007 Originally published in: Proceedings of the 2 nd International
Reprint Series Experimental results of a 300 khz shallow water synthetic aperture sonar Andrea Bellettini, Marc Pinto, Benjamin Evans November 2007 Originally published in: Proceedings of the 2 nd International
Benthowave Instrument Inc.
 DESCRIPTION BII-5020 Series Power Amplifier Driving Sonar Transducer / Projector Page 1 of 5 BII-5020 series is 62-watt linear wideband power amplifier, which offers low distortion and low power consumption
DESCRIPTION BII-5020 Series Power Amplifier Driving Sonar Transducer / Projector Page 1 of 5 BII-5020 series is 62-watt linear wideband power amplifier, which offers low distortion and low power consumption
Manual for WCT EM-IMG Package
 Manual for WCT EM-IMG Package Windows Version Wave Computation Technologies, Inc. March, 2017 1 Introduction Imaging Simulation Requirements o o o Content Transmitters & receivers Measured signal Material
Manual for WCT EM-IMG Package Windows Version Wave Computation Technologies, Inc. March, 2017 1 Introduction Imaging Simulation Requirements o o o Content Transmitters & receivers Measured signal Material
Instantaneous Baseline Damage Detection using a Low Power Guided Waves System
 Instantaneous Baseline Damage Detection using a Low Power Guided Waves System can produce significant changes in the measured responses, masking potential signal changes due to structure defects [2]. To
Instantaneous Baseline Damage Detection using a Low Power Guided Waves System can produce significant changes in the measured responses, masking potential signal changes due to structure defects [2]. To
AN ACOUSTIC PIPELINE TRACKING AND SURVEY SYSTEM FOR THE OFFSHORE
 AN ACOUSTIC PIPELINE TRACKING AND SURVEY SYSTEM FOR THE OFFSHORE Nico Roosnek Roosnek Research & Development Vlaskamp 92 2592 AC The Hague The Netherlands e-mail: nico@roosnek.nl Abstract: Acoustic pipeline
AN ACOUSTIC PIPELINE TRACKING AND SURVEY SYSTEM FOR THE OFFSHORE Nico Roosnek Roosnek Research & Development Vlaskamp 92 2592 AC The Hague The Netherlands e-mail: nico@roosnek.nl Abstract: Acoustic pipeline
Kongsberg Maritime Product overview
 Kongsberg Maritime Product overview / 1 / 1-Nov-12 Frequency Range Coverage 125,250,500kHz 0.5-200m 12xD 200-400kHz 0.5-500m 5.5xD / 140-200 deg 300 khz 0.5-270m 4-10xD / 130-200 deg 70-100 khz 3-2000m
Kongsberg Maritime Product overview / 1 / 1-Nov-12 Frequency Range Coverage 125,250,500kHz 0.5-200m 12xD 200-400kHz 0.5-500m 5.5xD / 140-200 deg 300 khz 0.5-270m 4-10xD / 130-200 deg 70-100 khz 3-2000m
The Signature VM package delivers vessel-mounted AD2CP capabilities based on present-day technology
 The package delivers vessel-mounted AD2CP capabilities based on present-day technology Until now, ADCP current surveys have been complex and time-consuming processes. A successful current survey depends
The package delivers vessel-mounted AD2CP capabilities based on present-day technology Until now, ADCP current surveys have been complex and time-consuming processes. A successful current survey depends
Creating Arbitrary Waveforms in the U2300A Series and U2500A Series Data Acquisition Devices
 Creating Arbitrary Waveforms in the U2300A Series and U2500A Series Data Acquisition Devices Application Note Introduction The U2300A Series and U2500A Series data acquisition device (DAQ) families are
Creating Arbitrary Waveforms in the U2300A Series and U2500A Series Data Acquisition Devices Application Note Introduction The U2300A Series and U2500A Series data acquisition device (DAQ) families are
Opera Duo. GeoRadar Division
 Utilities Detection and Mapping Opera Duo: real-time detection of pipes RIS MF Hi-Mod: Utilities mapping on all zones All rights reserved to IDS 2 Utilities Detection and Mapping Stream: massive arrays
Utilities Detection and Mapping Opera Duo: real-time detection of pipes RIS MF Hi-Mod: Utilities mapping on all zones All rights reserved to IDS 2 Utilities Detection and Mapping Stream: massive arrays
DIGITAL FILTERING OF MULTIPLE ANALOG CHANNELS
 DIGITAL FILTERING OF MULTIPLE ANALOG CHANNELS Item Type text; Proceedings Authors Hicks, William T. Publisher International Foundation for Telemetering Journal International Telemetering Conference Proceedings
DIGITAL FILTERING OF MULTIPLE ANALOG CHANNELS Item Type text; Proceedings Authors Hicks, William T. Publisher International Foundation for Telemetering Journal International Telemetering Conference Proceedings
UAVSAR in Africa. Quality Assurance and Preliminary Results. Brian Hawkins, UAVSAR Team
 Photo by Sassan Saatchi UAVSAR in Africa Quality Assurance and Preliminary Results Brian Hawkins, UAVSAR Team CEOS SAR Cal/Val Workshop 2016 Copyright 2016 California Institute of Technology. Government
Photo by Sassan Saatchi UAVSAR in Africa Quality Assurance and Preliminary Results Brian Hawkins, UAVSAR Team CEOS SAR Cal/Val Workshop 2016 Copyright 2016 California Institute of Technology. Government
NEutrino Mediterranean Observatory
 On line monitoring of underwater acoustic background from 2000 m depth NEutrino Mediterranean Observatory G. Riccobene, for the Collaboration The test site in Catania The Collaboration aims at installing
On line monitoring of underwater acoustic background from 2000 m depth NEutrino Mediterranean Observatory G. Riccobene, for the Collaboration The test site in Catania The Collaboration aims at installing
Mid-Frequency Reverberation Measurements with Full Companion Environmental Support
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Mid-Frequency Reverberation Measurements with Full Companion Environmental Support Dajun (DJ) Tang Applied Physics Laboratory,
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Mid-Frequency Reverberation Measurements with Full Companion Environmental Support Dajun (DJ) Tang Applied Physics Laboratory,
ACOUSTIC REFLECTION AND TRANSMISSION EXPERIMENTS FROM 4.5 TO 50 KHZ AT THE SEDIMENT ACOUSTICS EXPERIMENT 2004 (SAX04)
") Proceedings of the International Conference Underwater Acoustic Measurements: Technologies &Results Heraklion, Crete, Greece, 28 th June 1 st July 2005 ACOUSTIC REFLECTION AND TRANSMISSION EXPERIMENTS
Proceedings of the International Conference Underwater Acoustic Measurements: Technologies &Results Heraklion, Crete, Greece, 28 th June 1 st July 2005 ACOUSTIC REFLECTION AND TRANSMISSION EXPERIMENTS
USER S MANUAL. Revision: 2.0 / February Web:
 DISCOVER 4200-MP SIDE SCAN PROCESSOR SOFTWARE USER S MANUAL Revision: 2.0 / February 2008 Email: sales@edgetech.com Web: http://www.edgetech.com 4 Little Brook Road West Wareham, MA 02576 Tel: (508) 291-0057
DISCOVER 4200-MP SIDE SCAN PROCESSOR SOFTWARE USER S MANUAL Revision: 2.0 / February 2008 Email: sales@edgetech.com Web: http://www.edgetech.com 4 Little Brook Road West Wareham, MA 02576 Tel: (508) 291-0057
DISCOVER SUB-BOTTOM SOFTWARE
 DISCOVER SUB-BOTTOM SOFTWARE USER SOFTWARE MANUAL 0019800_REV_A 5/26/2017 EdgeTech 4 Little Brook Road West Wareham, MA 02576 Tel: (508) 291-0057 Fax: (508) 291-2491 www.edgetech.com ii The information,
DISCOVER SUB-BOTTOM SOFTWARE USER SOFTWARE MANUAL 0019800_REV_A 5/26/2017 EdgeTech 4 Little Brook Road West Wareham, MA 02576 Tel: (508) 291-0057 Fax: (508) 291-2491 www.edgetech.com ii The information,
Increased Safety and Efficiency using 3D Real-Time Sonar for Subsea Construction
 Increased Safety and Efficiency using 3D Real-Time Sonar for Subsea Construction Chief Technology Officer CodaOctopus Products, Ltd. Booth A33a 2D, 3D and Real-Time 3D (4D) Sonars? 2D Imaging 3D Multibeam
Increased Safety and Efficiency using 3D Real-Time Sonar for Subsea Construction Chief Technology Officer CodaOctopus Products, Ltd. Booth A33a 2D, 3D and Real-Time 3D (4D) Sonars? 2D Imaging 3D Multibeam
DEVICE CONFIGURATION INSTRUCTIONS
 WinFrog Device Group: Device Name/Model: Device Manufacturer: Device Data String(s) Output to WinFrog: WinFrog Data String(s) Output to Device: WinFrog Data Item(s) and their RAW record: GPS POS/MV (NMEA)
WinFrog Device Group: Device Name/Model: Device Manufacturer: Device Data String(s) Output to WinFrog: WinFrog Data String(s) Output to Device: WinFrog Data Item(s) and their RAW record: GPS POS/MV (NMEA)
NAUTILUS MARINE SERVICE GmbH. History of VITROVEX
 NAUTILUS MARINE SERVICE GmbH History of VITROVEX NAUTILUS MARINE SERVICE GmbH VITROVEX, Glass products for marine science and technology Scientific systems and instruments The Start 1989 First contact
NAUTILUS MARINE SERVICE GmbH History of VITROVEX NAUTILUS MARINE SERVICE GmbH VITROVEX, Glass products for marine science and technology Scientific systems and instruments The Start 1989 First contact
VB20SL3 20Hz GPS Data Logger With Slip, Pitch and Roll Angle. User Guide
 VB20SL3 20Hz GPS Data Logger With Slip, Pitch and Roll Angle User Guide Page 1 of 30 Contents INTRODUCTION... 3 FEATURES... 3 OPERATION... 4 GETTING STARTED... 4 ANTENNA TYPES AND PLACEMENT... 6 DISPLAY
VB20SL3 20Hz GPS Data Logger With Slip, Pitch and Roll Angle User Guide Page 1 of 30 Contents INTRODUCTION... 3 FEATURES... 3 OPERATION... 4 GETTING STARTED... 4 ANTENNA TYPES AND PLACEMENT... 6 DISPLAY
Characteristics and protection criteria for radars operating in the aeronautical radionavigation service in the frequency band
 Recommendation ITU-R M.2008 (03/2012) Characteristics and protection criteria for radars operating in the aeronautical radionavigation service in the frequency band 13.25-13.40 GHz M Series Mobile, radiodetermination,
Recommendation ITU-R M.2008 (03/2012) Characteristics and protection criteria for radars operating in the aeronautical radionavigation service in the frequency band 13.25-13.40 GHz M Series Mobile, radiodetermination,
Optimizing Resolution and Uncertainty in Bathymetric Sonar Systems
 University of New Hampshire University of New Hampshire Scholars' Repository Center for Coastal and Ocean Mapping Center for Coastal and Ocean Mapping 6-2013 Optimizing Resolution and Uncertainty in Bathymetric
University of New Hampshire University of New Hampshire Scholars' Repository Center for Coastal and Ocean Mapping Center for Coastal and Ocean Mapping 6-2013 Optimizing Resolution and Uncertainty in Bathymetric
Telemetry formats and equations of Painani-2 Satellite
 Telemetry formats and equations of Painani-2 Satellite Uplink and Downlink telemetry commands have a special format. This commands have 2 as header (the header always will be the same, it is M, X in ASCII
Telemetry formats and equations of Painani-2 Satellite Uplink and Downlink telemetry commands have a special format. This commands have 2 as header (the header always will be the same, it is M, X in ASCII
Exploitation of frequency information in Continuous Active Sonar
 PROCEEDINGS of the 22 nd International Congress on Acoustics Underwater Acoustics : ICA2016-446 Exploitation of frequency information in Continuous Active Sonar Lisa Zurk (a), Daniel Rouseff (b), Scott
PROCEEDINGS of the 22 nd International Congress on Acoustics Underwater Acoustics : ICA2016-446 Exploitation of frequency information in Continuous Active Sonar Lisa Zurk (a), Daniel Rouseff (b), Scott
CHAPTER 3 THE DESIGN OF TRANSMISSION LOSS SUITE AND EXPERIMENTAL DETAILS
 35 CHAPTER 3 THE DESIGN OF TRANSMISSION LOSS SUITE AND EXPERIMENTAL DETAILS 3.1 INTRODUCTION This chapter deals with the details of the design and construction of transmission loss suite, measurement details
35 CHAPTER 3 THE DESIGN OF TRANSMISSION LOSS SUITE AND EXPERIMENTAL DETAILS 3.1 INTRODUCTION This chapter deals with the details of the design and construction of transmission loss suite, measurement details
UAV Detection and Localization Using Passive DVB-T Radar MFN and SFN
 UAV Detection and Localization Using Passive DVB-T Radar MFN and SFN Dominique Poullin ONERA Palaiseau Chemin de la Hunière BP 80100 FR-91123 PALAISEAU CEDEX FRANCE Dominique.poullin@onera.fr ABSTRACT
UAV Detection and Localization Using Passive DVB-T Radar MFN and SFN Dominique Poullin ONERA Palaiseau Chemin de la Hunière BP 80100 FR-91123 PALAISEAU CEDEX FRANCE Dominique.poullin@onera.fr ABSTRACT
HIGH FREQUENCY INTENSITY FLUCTUATIONS
 Proceedings of the Seventh European Conference on Underwater Acoustics, ECUA 004 Delft, The Netherlands 5-8 July, 004 HIGH FREQUENCY INTENSITY FLUCTUATIONS S.D. Lutz, D.L. Bradley, and R.L. Culver Steven
Proceedings of the Seventh European Conference on Underwater Acoustics, ECUA 004 Delft, The Netherlands 5-8 July, 004 HIGH FREQUENCY INTENSITY FLUCTUATIONS S.D. Lutz, D.L. Bradley, and R.L. Culver Steven
EEG Probe Project. Grant G. Connell
 EEG Probe Project Grant G. Connell EEG Probe Project Design Objectives Investigate BCI for severely handicapped individuals Use time, frequency, and phase displays Use DSP techniques for near real time
EEG Probe Project Grant G. Connell EEG Probe Project Design Objectives Investigate BCI for severely handicapped individuals Use time, frequency, and phase displays Use DSP techniques for near real time
Autonomous Underwater Vehicle Navigation.
 Autonomous Underwater Vehicle Navigation. We are aware that electromagnetic energy cannot propagate appreciable distances in the ocean except at very low frequencies. As a result, GPS-based and other such
Autonomous Underwater Vehicle Navigation. We are aware that electromagnetic energy cannot propagate appreciable distances in the ocean except at very low frequencies. As a result, GPS-based and other such
SonarWiz Datum Align Reference
 SonarWiz Datum Align Reference Rev 8.0, 12/22/2015 Chesapeake Technology, Inc. email: support@chesapeaketech.com Main Web site: http://www.chesapeaketech.com Support Web site: http://www.chestech-support.com
SonarWiz Datum Align Reference Rev 8.0, 12/22/2015 Chesapeake Technology, Inc. email: support@chesapeaketech.com Main Web site: http://www.chesapeaketech.com Support Web site: http://www.chestech-support.com