P15661 Reciprocating Friction Tester Base Subsystem
|
|
|
- Herbert Adams
- 5 years ago
- Views:
Transcription
1 P15661 Reciprocating Friction Tester Base Subsystem 1 P R E L I M I N A R Y D E T A I L E D D E S I G N R E V I E W 11/20/2014
2 Team Roles 2 Team Member Major Subsystem Role Alexandra Woodward Industrial Engineering Project Manager Sean Cummings Mechanical Engineering Mechanical Components Subsystem: Specimen Holder Ethan Hanson Mechanical Engineering Mechanical Components Subsystem: Linear Guide Tyler Nigolian Electrical Engineering Electrical Components Subsystem: Voice Coil Matt Lebowitz Electrical Engineering Electrical Components Subsystem: Encoder Project Guide: Gary Werth Customer: Dr. Iglesias Victoria

3 Engineering Requirements 3 Link to Test Plans on Edge
4 Heating the specimen Meeting with Dr. Iglesias on 10/30 Went over feasibility of adding heating of the specimen to 200 C Decided to go on the assumption that Heat will be implemented as a future MSD project. 4
5 Subsystems 5 Sub-System Voice Coil Specimen Holder Linear Guide Encoder Power Supply Interface with Armature Team Part number P xxx P xxx P xxx P xxx P xxx P xxx

6 Bill of Materials 6
7 System Layout 7
8 Specimen Holder Engineering Requirements 8 ID Eng. Reqt Units Value Risk L S I Risk Abatement SH1 Weight Kg 0.5 High Weight increases cost of voice coil Model weight in Creo (.155 Kg w/o specimen) SH Mass Test Plan SH2 Cost $ TBD Over budget See BOM SH3 Specimen diameter mm should accept a range of diameters without extensive changes See design in Creo SH Specimen Diameter Test Plan SH4 Specimen thickness mm 5-25 should accept a range of thicknesses without extensive changes See design in Creo SH Specimen Thickness Test Plan SH5 Base is easy to clean s 45s Takes longer to clean than desired amount of time Base Cleanability Test Plan SH6 Frequency Hz 1-10 holder should not overload the voice coil max force under all frequency ranges used weight from Creo model to calculate force at 10Hz and is under the continuous force for the chosen VC
9 Specimen Holder Pin Fatigue Used Soderberg s Method Pin is Al-6061 σ e =.4(Ultimate Strength) = 423 Mpa σ m = Assume 1000N force = 126 Mpa S y = Yield Strength = 386 Mpa Solved for σ a = 163 Mpa F=129 N, we will only see a max of 16N (assume dia. 1/8 ) 9


10 Specimen Holder Design 10 Weight not including fasteners and specimen=.334kg
11 Test Plan Examples Test Plan: SH2, LG3 (Testing load range) Use weights to test if the Specimen Holder and Guide can withstand the normal forces they will experience Use a force gauge to measure the force required to move the guide block Test Plan S11 (Base is easy to clean) 11 Time multiple people how long it takes to remove the specimen and disconnect the specimen holder from the guide block Link to all Test Plans in EDGE

12 Specimen Strength Test 12 This test shows that the weaker material that was given will withstand load higher than our specimen holder design can reproduce
13 Linear Guide Engineering Requirements 13 ID Eng Reqt. Units Value Risk L S I Risk Abatement LG1 Stroke [mm] 10 Cannot meet project requirement LG2 LG3 Load Capacity Friction Coefficient [N] >25 Exceeded load capacity results in unexpected resistance to motion Friction causes resistance to motion Guide purchased with a larger range of travel than what is required Guide purchased with larger load capacity that what is required For load ranges that are less than specified load capacity, friction in negligible. LG4 Cost $ <100 Project is over budget See BOM
![Anaheim Automation Linear Guide Design CPC-MR15MLSSV0N-100-10-10 $64 6-7 week lead time 14 Slider Block Rail Dimensions Height [mm] Load](/docs-images/82/84760438/images/14-0.jpg "Capacity Width [mm] Length [mm] Attachment screws Screw Pattern [mm] Weight [kg] Width [mm] Length [mm] 16 32 60 M3 x 5.5 25 x 25 0.")
14 Anaheim Automation Linear Guide Design CPC-MR15MLSSV0N $ week lead time 14 Slider Block Rail Dimensions Height [mm] Load Capacity Width [mm] Length [mm] Attachment screws Screw Pattern [mm] Weight [kg] Width [mm] Length [mm] M3 x x

15 Linear Guide System 15
16 Linear Guide with attached Specimen Holder 16
17 Voice Coil Engineering Requirements 17 ID Eng. Reqt Units Value Risk L S I Risk Abatement VC1 Provides enough force N N Cannot meet force requirements, subsystem fails Ensure specs meet required conditions, test once acquired VC2 Cost $ 500 Cannot afford voice coil see BOM VC3 Power Requirement W W Cannot provide correct power, subsystem fails Ensure specs have required power, ensure power supply has enough to support as well as a limit so more than the max VC4 Reliability Hours 24 Subsystem fails and voice coil permanently damaged Voice Coil Endurance Test VC5 Heat C C Voice coil overheats causing subsystem failure and possibly failure of other subsystems Heat analysis then determine cooling solution VC6 EM Field Gauss Gauss Other subsystems fail EM Test
18 Voice Coil Operation 18 Direct Drive Permanent magnet field and coil winding to produce force Force=kBLIN k= constant B=flux density I=current N=number of conductors L=length of conductors
 385")
19 Voice Coil Selection 19 Component Weight Specimen Holder.334 Voice Coil Cost [$] Max Weight of Moving Parts [kg] Remaining weight (screws, interface, etc.)

20 Voice Coil Data 20 MOTICONT LVCM

21 Voice Coil Design 21 Linear voice coil actuator with no shaft There are two female thread holes on each end of the voice coil for interfaced The voice coil will need to be assembled on a heat sinking material
 Duration S3 Electromagnetic Field Generated VC")
22 Voice Coil Testing 22 Testing to be done on voice coil Reliability S2, S7, S8 (Strength, Stroke, Heat) Duration S3 Electromagnetic Field Generated VC 6
23 Closed loop operation Voice Coil Control reduce errors by automatically adjusting the systems input improve stability of an unstable system increase or reduce the systems sensitivity enhance robustness against external disturbances to the process produce a reliable, repeatable performance 23
24 System with Voice Coil 24
25 Controller Requirements 25 ID Eng. Reqt Units Value Risk L S I Risk Abatement 1 LabVIEW n/a n/a Cannot communicate with PC Motor Compatibility V V Cannot effectively control voice coil Encoder n/a n/a Cannot provide positioning Homing n/a n/a Cannot return to test start/end Controller comes with LabVIEW VI Best performance is with motor rated at about ½ of supply voltage An encoder of lines/channel, giving quadrature encoder counts per revolution is recommended Homes to an Opto or Encoder Index with a single command


26 All-Motion EZSV17SK Kit Controller Selection Motor Driver Board RS485 USB Converter EZ Bus Cable OptoSensor and Push Button 26



27 Controller Operation 27
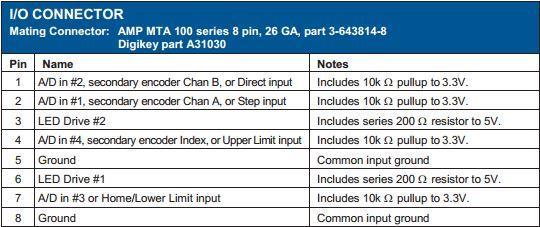
28 Wiring Diagram 28


29 G-option mounting ears H-option cover Encoder Mounting 29 Must be centered on self-supporting shaft


30 Encoder Design 30
 leads (Quadrature signal) Pulse frequency corresponds to speed Pulse count corresponds to")
31 Encoder Operation 31 Sensor does not emit or receive interference, optical sensing Direction is given by which signal (A/B) leads (Quadrature signal) Pulse frequency corresponds to speed Pulse count corresponds to distance

32 Encoder Resolution 12.7mm diameter contact wheel = 39.9mm circumference To achieve stroke accuracy of 0.5mm, CPR > CPR gives the system accuracy of 0.039mm, more precision at minimal extra cost. 32 =39.9mm d=12.7mm

 SCXI-1302")

33 Connecting Friction Signal to DAQ 33 SCXI-1001 Chassis SCXI-1520 (Strain module) SCXI-1314 (Strain Front Panel) SCXI-1180 (Signal Feedthrough) SCXI-1302 (Terminal Panel) NI-DAQmx Software Set with strain gauge parameters Connection diagrams to verify
34 System with Encoder 34
35 Power Supply Requirements 35 ID Eng. Reqt Units Value Risk L S I Risk Abatement 1 Input Voltage V V Does not sufficiently convert power from AC to DC Converter is within specification, will test for endurance 2 Output Voltage V 3 Max Current A V A Does not power voice coil, encoder, or additional sensors correctly Incorrect current is drawn causing issue or failure of voice coil Converter is within specification, will test for endurance Converter is within specification, will test for endurance 4 Power W 33 (minimum) Subsystem fails and voice coil permanently damaged Converter is within specification, will test for endurance 5 Housed n/a n/a Unsafe and poor heat dissipation Converter is housed and can be cooled properly by convection alone, will test for ambient heat effects


36 TDK-Lamda LS50-24 Power Supply Selection 36

37 Power Supply Testing Input/Output Parameters PS 1, PS 2, PS 3, PS 4 Heat PS 5 37


38 LabVIEW Program 38
39 LabVIEW Strain Parameters 39 Strain Range Gage Factor Gage Resistance Initial Voltage <m<0.001 R/R L/L 350Ω Vex 0-10v Strain Configuration Lead Resistance = Acquired from rotating friction tester 0V Typically, Offset to calibrate for lead resistance and nonzero bridge voltage. Quarter Bridge for single strain gauge application Measured with multimeter during assembly
40 AllMotion EZServo Syntax 40 Example Command Function Z2000 A125 P62 D62 V4135 Set speed to gp62d62g0 T Travel 2000 ticks or until limit switch is interrupted, then set location as home/zero location Move to absolute position 5mm from home Move positive direction by 2.5mm Move negative direction by 2.5mm encoder ticks/second -> 5mm/sec -> F=1hz for above Repeat move positive 2.5mm move negative 2.5mm until interrupted Terminate Program
41 Risk Mitigation 41
42 Action Items (rest of MSDI) Complete Process Sheets Fill out and submit purchase orders for all parts* Create more detailed version of MSDII Project Plan (assign resources to tasks) 42

43 MSDII Preliminary Project Plan 43

44 MSDII Testing 44
45 Learnings/Challenges One design change affects the whole system Voice coil changed the voice coil block We can finally see the iterative process Sharing of CAD models between teams (updates) 45
46 Course Feedback 46 Let us know before had if there will be a meeting on Tuesday (Even if it is only 1 hour before the meeting) If we were given a project plan from past MSD groups
P15661 Reciprocating Friction Tester Base Subsystem
 P15661 Reciprocating Friction Tester Base Subsystem 1 D E T A I L E D D E S I G N R E V I E W Team Roles 2 Team Member Major Subsystem Role Alexandra Woodward Industrial Engineering Project Manager Sean
P15661 Reciprocating Friction Tester Base Subsystem 1 D E T A I L E D D E S I G N R E V I E W Team Roles 2 Team Member Major Subsystem Role Alexandra Woodward Industrial Engineering Project Manager Sean
Jaguar Motor Controller (Stellaris Brushed DC Motor Control Module with CAN)
") Jaguar Motor Controller (Stellaris Brushed DC Motor Control Module with CAN) 217-3367 Ordering Information Product Number Description 217-3367 Stellaris Brushed DC Motor Control Module with CAN (217-3367)
Jaguar Motor Controller (Stellaris Brushed DC Motor Control Module with CAN) 217-3367 Ordering Information Product Number Description 217-3367 Stellaris Brushed DC Motor Control Module with CAN (217-3367)
ME375 Lab Project. Bradley Boane & Jeremy Bourque April 25, 2018
 ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
Data Sheet. AEDx-8xxx-xxx 2- or 3-Channel Incremental Encoder Kit with Codewheel. Description. Features. Assembly View. Housing.
 AEDx-8xxx-xxx 2- or 3-Channel Incremental Encoder Kit with Codewheel Data Sheet Description The AEDx-8xxx comes in an option of two-channel or three-channel optical incremental encoder kit with codewheel
AEDx-8xxx-xxx 2- or 3-Channel Incremental Encoder Kit with Codewheel Data Sheet Description The AEDx-8xxx comes in an option of two-channel or three-channel optical incremental encoder kit with codewheel
MGL Avionics Autopilot. Servo. Specifications & Installation Manual. Last Update: 20 October Disclaimer:
 MGL Avionics Autopilot Servo Specifications & Installation Manual Last Update: 20 October 2010 Disclaimer: MGL Avionics should not be held responsible for errors or omissions in this document. Usage of
MGL Avionics Autopilot Servo Specifications & Installation Manual Last Update: 20 October 2010 Disclaimer: MGL Avionics should not be held responsible for errors or omissions in this document. Usage of
Lab 2A: Introduction to Sensing and Data Acquisition
 Lab 2A: Introduction to Sensing and Data Acquisition Prof. R.G. Longoria Department of Mechanical Engineering The University of Texas at Austin June 12, 2014 1 Lab 2A 2 Sensors 3 DAQ 4 Experimentation
Lab 2A: Introduction to Sensing and Data Acquisition Prof. R.G. Longoria Department of Mechanical Engineering The University of Texas at Austin June 12, 2014 1 Lab 2A 2 Sensors 3 DAQ 4 Experimentation
Project Proposal. Low-Cost Motor Speed Controller for Bradley ECE Department Robots L.C.M.S.C. By Ben Lorentzen
 Project Proposal Low-Cost Motor Speed Controller for Bradley ECE Department Robots L.C.M.S.C. By Ben Lorentzen Advisor Dr. Gary Dempsey Bradley University Department of Electrical Engineering December
Project Proposal Low-Cost Motor Speed Controller for Bradley ECE Department Robots L.C.M.S.C. By Ben Lorentzen Advisor Dr. Gary Dempsey Bradley University Department of Electrical Engineering December
n Measurable displacements between n Linearity: max. ± 0.05 % n Housing diameter 12.9 mm n Service life: 10 8 movements
 Potentiometric Displacement Sensor Miniature design Model 8709 Code: Delivery: Warranty: 8709 EN ex stock 24 months Application Potentiometric displacement sensors are used for direct, precise measurement
Potentiometric Displacement Sensor Miniature design Model 8709 Code: Delivery: Warranty: 8709 EN ex stock 24 months Application Potentiometric displacement sensors are used for direct, precise measurement
Sorting Line with Detection 9V
 536628 Sorting Line with Detection 9V I2 O8 I1 I3 C1 I5 I6 I4 Not in the picture: O5, O6, O7, O8 Circuit layout for Sorting Line with Detection Terminal no. Function Input/Output 1 color sensor I1 2 phototransistor
536628 Sorting Line with Detection 9V I2 O8 I1 I3 C1 I5 I6 I4 Not in the picture: O5, O6, O7, O8 Circuit layout for Sorting Line with Detection Terminal no. Function Input/Output 1 color sensor I1 2 phototransistor
28000 Series Size 11 Double Stack Hybrid Linear Actuators
 28000 Series Double Stack Stepper Motor Linear Actuators 28000 Series Double Stack Hybrid Linear Actuators Enhanced performance in motion control The 28000 Series is available in a wide variety of resolutions
28000 Series Double Stack Stepper Motor Linear Actuators 28000 Series Double Stack Hybrid Linear Actuators Enhanced performance in motion control The 28000 Series is available in a wide variety of resolutions
43000 Series: Size 17 Single Stack Stepper Motor Linear Actuator
 HAYD: 2 756 744 4 Series: Single Stack Stepper Motor Linear Actuator Haydon 4 Series hybrid linear actuators are our best selling compact hybrid motors. Single Stack Captive Shaft These top selling designs
HAYD: 2 756 744 4 Series: Single Stack Stepper Motor Linear Actuator Haydon 4 Series hybrid linear actuators are our best selling compact hybrid motors. Single Stack Captive Shaft These top selling designs
Size 11 Double Stack. Captive Shaft. Bipolar 5 VDC 12 VDC. 750 ma. 313 ma 6.7 Ω 34.8 Ω. 5.8 mh mh. 7.5 W Total gcm 2
 HAYD: 0 756 7 KERK: 60 690 8000 Series: Size Double Stack Stepper Motor Linear Actuator Haydon Size Double Stack hybrid linear actuators for enhanced performance in motion control Three designs are, captive,
HAYD: 0 756 7 KERK: 60 690 8000 Series: Size Double Stack Stepper Motor Linear Actuator Haydon Size Double Stack hybrid linear actuators for enhanced performance in motion control Three designs are, captive,
28H6 n n n n n n. 28F6 n n n n n n. E28H6 n n n n n n 12 VDC 5 VDC 0.18 A 0.42 A 68.6 Ω. 3.3 mh mh 4.2 W. Class B (Class F available)
") HAYD: 0 756 7 KERK: 60 690 8000 Series: Size Single Stack Stepper Motor Linear Actuator Haydon Size hybrid linear actuators offer compact, production-proven precision in motion The various patented designs
HAYD: 0 756 7 KERK: 60 690 8000 Series: Size Single Stack Stepper Motor Linear Actuator Haydon Size hybrid linear actuators offer compact, production-proven precision in motion The various patented designs
Size 23 Single Stack. Captive Shaft. 57H6 n n n n n n. 57F6 n n n n n n. E57H6 n n n n n n 12 VDC 5 VDC 1.3 A .54 A 22.2 Ω. 5.3 mh.
 HAYD: 0 756 7 Single Stack Stepper Motor Linear Actuator Haydon 57000 Series hybrid linear actuators for applications that require forces up to 00 lbs. (890 N). Single Stack External Linear The Haydon
HAYD: 0 756 7 Single Stack Stepper Motor Linear Actuator Haydon 57000 Series hybrid linear actuators for applications that require forces up to 00 lbs. (890 N). Single Stack External Linear The Haydon
New Long Stroke Vibration Shaker Design using Linear Motor Technology
 New Long Stroke Vibration Shaker Design using Linear Motor Technology The Modal Shop, Inc. A PCB Group Company Patrick Timmons Calibration Systems Engineer Mark Schiefer Senior Scientist Long Stroke Shaker
New Long Stroke Vibration Shaker Design using Linear Motor Technology The Modal Shop, Inc. A PCB Group Company Patrick Timmons Calibration Systems Engineer Mark Schiefer Senior Scientist Long Stroke Shaker
87000 Series Size 34 Hybrid Linear Actuators
 87000 Series Single Stack Stepper Motor Linear Actuators 87000 Series Hybrid Linear Actuators Our largest, most powerful linear actuator incorporates the same precision, high performance and durable patented
87000 Series Single Stack Stepper Motor Linear Actuators 87000 Series Hybrid Linear Actuators Our largest, most powerful linear actuator incorporates the same precision, high performance and durable patented
Agilent AEDA-3300 Series Ultra Miniature, High Resolution Incremental Kit Encoders Data Sheet
 Description The AEDA-3300 series are high performance, cost effective, three-channel optical incremental encoder modules with integrated bearing stage. By using transmissive encoder technology to sense
Description The AEDA-3300 series are high performance, cost effective, three-channel optical incremental encoder modules with integrated bearing stage. By using transmissive encoder technology to sense
Size 23 Double Stack External Linear Size 23 Double Stack. 57M4 n n n n n n. 57L4 n n n n n n. E57M4 n n n n n n. Bipolar 5 VDC 12 VDC 2.
 HAYD: 0 756 7 57000 Series: Double Stack Stepper Motor Linear Actuator Haydon 57000 Series Double Stack hybrid linear actuators deliver greater performance in a compact size. The various patented designs
HAYD: 0 756 7 57000 Series: Double Stack Stepper Motor Linear Actuator Haydon 57000 Series Double Stack hybrid linear actuators deliver greater performance in a compact size. The various patented designs
Incremental encoders Redundant sensing, isolated blind hollow shaft ø mm, cone shaft ø17 mm pulses per revolution
 Features Robust, compact housing Two bearings with large distance, one at each end High shaft load up to 450 N Shock resistant up to 250 g Shaft insulation up to 2.8 kv Highest operating speed 10000 rpm
Features Robust, compact housing Two bearings with large distance, one at each end High shaft load up to 450 N Shock resistant up to 250 g Shaft insulation up to 2.8 kv Highest operating speed 10000 rpm
Brushed DC Motor Control. Module with CAN (MDL-BDC24)
") Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) Ordering Information Product No. MDL-BDC24 RDK-BDC24 Description Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) for Single-Unit
Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) Ordering Information Product No. MDL-BDC24 RDK-BDC24 Description Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) for Single-Unit
The World of Motion Control
 PWB-Ruhlatec Industrieprodukte GmbH Siegburger Str. 39a 53757 Sankt Augustin Germany www.pwb-technologies.com info@pwb-technologies.com AE30 medium temperature range LD 1 of 9 Rev. 3.0 / 06.07.2007 Description
PWB-Ruhlatec Industrieprodukte GmbH Siegburger Str. 39a 53757 Sankt Augustin Germany www.pwb-technologies.com info@pwb-technologies.com AE30 medium temperature range LD 1 of 9 Rev. 3.0 / 06.07.2007 Description
General-Purpose AC Servo. MELSERVO-JE Servo amplifier INSTRUCTION MANUAL (TROUBLE SHOOTING)
") General-Purpose AC Servo MELSERVO-JE Servo amplifier INSTRUCTION MANUAL (TROUBLE SHOOTING) D Safety Instructions Please read the instructions carefully before using the equipment. To use the equipment
General-Purpose AC Servo MELSERVO-JE Servo amplifier INSTRUCTION MANUAL (TROUBLE SHOOTING) D Safety Instructions Please read the instructions carefully before using the equipment. To use the equipment
General-Purpose AC Servo. MELSERVO-JE Servo amplifier INSTRUCTION MANUAL (TROUBLE SHOOTING)
") General-Purpose AC Servo MELSERVO-JE Servo amplifier INSTRUCTION MANUAL (TROUBLE SHOOTING) F Safety Instructions Please read the instructions carefully before using the equipment. To use the equipment
General-Purpose AC Servo MELSERVO-JE Servo amplifier INSTRUCTION MANUAL (TROUBLE SHOOTING) F Safety Instructions Please read the instructions carefully before using the equipment. To use the equipment
Torque Sensor. Torque. with Dual-Range-Option. Type 4503A...
 Torque Torque Sensor with Dual-Range-Option Type 4503A... Type 4503A... torque sensors with built-in speed sensor operate on the strain gage principle. An integral, digital measurement conditioning system
Torque Torque Sensor with Dual-Range-Option Type 4503A... Type 4503A... torque sensors with built-in speed sensor operate on the strain gage principle. An integral, digital measurement conditioning system
Optical encoder MEC22 HR
 Optical encoder MEC22 HR Description The MEC22 HR is a high resolution optical hollow shaft encoder that can be fixed quickly and easily on different sizes of motor shafts. The encoder provides two square
Optical encoder MEC22 HR Description The MEC22 HR is a high resolution optical hollow shaft encoder that can be fixed quickly and easily on different sizes of motor shafts. The encoder provides two square
P15571 Rev 2 Test Plan
 This document will detail the team s plan to test that the engineering requirements of the project are met. Some of the items found in this report are on-going, so this report will be updated periodically.
This document will detail the team s plan to test that the engineering requirements of the project are met. Some of the items found in this report are on-going, so this report will be updated periodically.
35H6 n n n n n n. 35F6 n n n n n n. E35H6 n n n n n n. Unipolar** 5 VDC 12 VDC 0.24 A 0.57 A. 30 mh. 6.5 mh 5.7 W gcm 2
 HAYD: 0 756 7 5000 Series: Size Single Stack Stepper Motor Linear Actuator Haydon 5000 Series Size hybrid linear actuators have been improved to provide higher force, longer life and improved performance.
HAYD: 0 756 7 5000 Series: Size Single Stack Stepper Motor Linear Actuator Haydon 5000 Series Size hybrid linear actuators have been improved to provide higher force, longer life and improved performance.
Rotary Encoder System Compact Model Range
 we set the standards RIK Rotary Encoder System Compact Model Range 2 Incremental rotary encoder Features Compact design, consisting of scanning head with round cable, 15pin D-sub connector and grating
we set the standards RIK Rotary Encoder System Compact Model Range 2 Incremental rotary encoder Features Compact design, consisting of scanning head with round cable, 15pin D-sub connector and grating
Incremental encoders Blind hollow shaft or cone shaft pulses per revolution
 Features TTL output driver for cable length up to 550 m Very high resistance to shock and vibrations Hybrid bearing for extended service life Shaft insulation up to.8 kv Large terminal box, turn by 80
Features TTL output driver for cable length up to 550 m Very high resistance to shock and vibrations Hybrid bearing for extended service life Shaft insulation up to.8 kv Large terminal box, turn by 80
CS545 Contents XIV. Components of a Robotic System. Signal Processing. Reading Assignment for Next Class
 CS545 Contents XIV Components of a Robotic System Power Supplies and Power Amplifiers Actuators Transmission Sensors Signal Processing Linear filtering Simple filtering Optimal filtering Reading Assignment
CS545 Contents XIV Components of a Robotic System Power Supplies and Power Amplifiers Actuators Transmission Sensors Signal Processing Linear filtering Simple filtering Optimal filtering Reading Assignment
Strain Gauge Measurement A Tutorial
 Application Note 078 Strain Gauge Measurement A Tutorial What is Strain? Strain is the amount of deformation of a body due to an applied force. More specifically, strain (ε) is defined as the fractional
Application Note 078 Strain Gauge Measurement A Tutorial What is Strain? Strain is the amount of deformation of a body due to an applied force. More specifically, strain (ε) is defined as the fractional
3Specifications CHAPTER THREE IN THIS CHAPTER
 CHAPTER THREE 3Specifications IN THIS CHAPTER Drive Specifications SM and NeoMetric Motor Specifications SM and NeoMetric Motor / Curves SM and NeoMetric Motor Dimensions SM and NeoMetric Encoder Specifications
CHAPTER THREE 3Specifications IN THIS CHAPTER Drive Specifications SM and NeoMetric Motor Specifications SM and NeoMetric Motor / Curves SM and NeoMetric Motor Dimensions SM and NeoMetric Encoder Specifications
Stepper Motors WE CREATE MOTION
 WE CREATE MOTIO PRECIstep Technology EW Page FDM 6 Two Phase with Disc Magnet, AM 8 Two Phase,6 AM Two Phase,6 ADM S Two Phase with Disc Magnet, 6 7 AM Two Phase 6 8 AM Two Phase AM -R Two Phase WE CREATE
WE CREATE MOTIO PRECIstep Technology EW Page FDM 6 Two Phase with Disc Magnet, AM 8 Two Phase,6 AM Two Phase,6 ADM S Two Phase with Disc Magnet, 6 7 AM Two Phase 6 8 AM Two Phase AM -R Two Phase WE CREATE
High Performance Current Transducer IT 200-S ULTRASTAB = A. ε L
 High Performance Current Transducer IT 200-S ULTRASTAB For the electronic measurement of currents: DC, AC, pulsed..., with galvanic isolation between the primary circuit and the secondary circuit. I PM
High Performance Current Transducer IT 200-S ULTRASTAB For the electronic measurement of currents: DC, AC, pulsed..., with galvanic isolation between the primary circuit and the secondary circuit. I PM
HS30A Optical Kit Encoder A, B Channel Quadrature TTL Outputs
 Features Two channel quadrature TTL compatible outputs 96 ~ 1250 cycles per resolution (CPR) Widely operating environment temperature from -40 ~ 85 Intelligent mounting design Compact size appearance Cost
Features Two channel quadrature TTL compatible outputs 96 ~ 1250 cycles per resolution (CPR) Widely operating environment temperature from -40 ~ 85 Intelligent mounting design Compact size appearance Cost
Catalog of CLA force and torque sensors
 Catalog of CLA force and torque sensors SC-002 LC-01 LC-10 TSF-000 TSF-05 TSF-1 TSF-100 Micro-force sensor Force sensor Micro-torque sensor Torque sensor Phone +41 32 421 44 90, Fax +41 32 421 44 91, ventes@cla.ch,
Catalog of CLA force and torque sensors SC-002 LC-01 LC-10 TSF-000 TSF-05 TSF-1 TSF-100 Micro-force sensor Force sensor Micro-torque sensor Torque sensor Phone +41 32 421 44 90, Fax +41 32 421 44 91, ventes@cla.ch,
Actuator Precision Characterization
 Actuator Precision Characterization Covers models T-NAXX, T-LAXX, X-LSMXXX, X-LSQXXX INTRODUCTION In order to get the best precision from your positioning devices, it s important to have an understanding
Actuator Precision Characterization Covers models T-NAXX, T-LAXX, X-LSMXXX, X-LSQXXX INTRODUCTION In order to get the best precision from your positioning devices, it s important to have an understanding
JHS-30A Optical Kit Encoder A, B Channel Quadrature TTL Outputs Features
 A, B Channel Quadrature TTL Outputs Features Two channel quadrature TTL compatible outputs 96 ~ 512 cycles per resolution (CPR) Widely operating environment temperature from -40 ~85 Intelligent mounting
A, B Channel Quadrature TTL Outputs Features Two channel quadrature TTL compatible outputs 96 ~ 512 cycles per resolution (CPR) Widely operating environment temperature from -40 ~85 Intelligent mounting
Screw Driven automation tables
 automation tables Precise multi-axis positioning systems play an integral part in today s semiconductor, computer peripheral, solar power, flat panel, life sciences, lab automation, biomedical and electronics
automation tables Precise multi-axis positioning systems play an integral part in today s semiconductor, computer peripheral, solar power, flat panel, life sciences, lab automation, biomedical and electronics
For the electronic measurement of current: DC, AC, pulsed..., with galvanic separation between the primary and the secondary circuit.
 Current Transducer IN 1000-S N = 1000 A For the electronic measurement of current: DC, AC, pulsed..., with galvanic separation between the primary and the secondary circuit. Features Closed loop (compensated)
Current Transducer IN 1000-S N = 1000 A For the electronic measurement of current: DC, AC, pulsed..., with galvanic separation between the primary and the secondary circuit. Features Closed loop (compensated)
California University of Pennsylvania Department of Applied Engineering & Technology Electrical Engineering Technology
 California University of Pennsylvania Department of Applied Engineering & Technology Electrical Engineering Technology < Use as a guide Do not copy and paste> EET 410 Design of Feedback Control Systems
California University of Pennsylvania Department of Applied Engineering & Technology Electrical Engineering Technology < Use as a guide Do not copy and paste> EET 410 Design of Feedback Control Systems
Torque Sensor. Torque. Dual-Range Sensor with Brushless Transmission. Type 4503A...
 Torque Torque Sensor Dual-Range Sensor with Brushless Transmission Type 4503A... Type 4503A... torque sensors with built-in speed sensor operate on the strain gage principle. An integral, digital measurement
Torque Torque Sensor Dual-Range Sensor with Brushless Transmission Type 4503A... Type 4503A... torque sensors with built-in speed sensor operate on the strain gage principle. An integral, digital measurement
Hydraulic Valve Interface Products
 Filename: Hydraulic Valve Interface Information.docx Date: 04/02/2014 Version: 2.0 Hydraulic Valve Interface Products Hydraulics provides a wonderful way of generating very large forces to move and control.
Filename: Hydraulic Valve Interface Information.docx Date: 04/02/2014 Version: 2.0 Hydraulic Valve Interface Products Hydraulics provides a wonderful way of generating very large forces to move and control.
Features. Applications
 AEDC-55xx / AEDC-56xx High Resolution Two or Three Channel Quick Assembly Encoders With Connector Latch Data Sheet Description The AEDC-5xxx series encoders, while similar to the industry standard HEDS-5xxx
AEDC-55xx / AEDC-56xx High Resolution Two or Three Channel Quick Assembly Encoders With Connector Latch Data Sheet Description The AEDC-5xxx series encoders, while similar to the industry standard HEDS-5xxx
PVA Sensor Specifications
 Position, Velocity, and Acceleration Sensors 24.1 Sections 8.2-8.5 Position, Velocity, and Acceleration (PVA) Sensors PVA Sensor Specifications Good website to start your search for sensor specifications:
Position, Velocity, and Acceleration Sensors 24.1 Sections 8.2-8.5 Position, Velocity, and Acceleration (PVA) Sensors PVA Sensor Specifications Good website to start your search for sensor specifications:
High Power Piezo Driver
 High Power Piezo Driver SOLUTIONS FOR HIGH-DYNAMICS 24/7 OPERATION Block diagram of a piezo driver with energy recovery Piezo actuator in a case with connections for temperature sensor and cooling air
High Power Piezo Driver SOLUTIONS FOR HIGH-DYNAMICS 24/7 OPERATION Block diagram of a piezo driver with energy recovery Piezo actuator in a case with connections for temperature sensor and cooling air
Administrative Notes. DC Motors; Torque and Gearing; Encoders; Motor Control. Today. Early DC Motors. Friday 1pm: Communications lecture
 At Actuation: ti DC Motors; Torque and Gearing; Encoders; Motor Control RSS Lecture 3 Wednesday, 11 Feb 2009 Prof. Seth Teller Administrative Notes Friday 1pm: Communications lecture Discuss: writing up
At Actuation: ti DC Motors; Torque and Gearing; Encoders; Motor Control RSS Lecture 3 Wednesday, 11 Feb 2009 Prof. Seth Teller Administrative Notes Friday 1pm: Communications lecture Discuss: writing up
1. A sinusoidal ac power supply has rms voltage V and supplies rms current I. What is the maximum instantaneous power delivered?
 1. A sinusoidal ac power supply has rms voltage V and supplies rms current I. What is the maximum instantaneous power delivered? A. VI B. VI C. VI D. VI. An alternating current supply of negligible internal
1. A sinusoidal ac power supply has rms voltage V and supplies rms current I. What is the maximum instantaneous power delivered? A. VI B. VI C. VI D. VI. An alternating current supply of negligible internal
TxBlock-USB Transmitter
 Transmitter TEMPERATURE TRANSMITTER - OPERATING MANUAL V1.0x I INTRODUCTION The TxBlock-USB is a 4-20 ma 2-wire temperature transmitter for head mount, powered by the current loop. The output current is
Transmitter TEMPERATURE TRANSMITTER - OPERATING MANUAL V1.0x I INTRODUCTION The TxBlock-USB is a 4-20 ma 2-wire temperature transmitter for head mount, powered by the current loop. The output current is
SERVO INDEXING AT MECHANICAL INDEXER PRICES
 SERVO INDEXING AT MECHANICAL INDEXER PRICES 1 Servo indexing at mechanical indexer prices The EZ INDEXER servo indexers are high precision indexing machines designed to be low cost without sacrificing
SERVO INDEXING AT MECHANICAL INDEXER PRICES 1 Servo indexing at mechanical indexer prices The EZ INDEXER servo indexers are high precision indexing machines designed to be low cost without sacrificing
Lab Exercise 9: Stepper and Servo Motors
 ME 3200 Mechatronics Laboratory Lab Exercise 9: Stepper and Servo Motors Introduction In this laboratory exercise, you will explore some of the properties of stepper and servomotors. These actuators are
ME 3200 Mechatronics Laboratory Lab Exercise 9: Stepper and Servo Motors Introduction In this laboratory exercise, you will explore some of the properties of stepper and servomotors. These actuators are
DC Resistance Meters 2840 Series
 Data Sheet DC Meters Touch screen to zoom, select, and enter values The DC resistance meters feature high accuracy and resolution measurements in the milliohm range. Both meters are ideally suited for
Data Sheet DC Meters Touch screen to zoom, select, and enter values The DC resistance meters feature high accuracy and resolution measurements in the milliohm range. Both meters are ideally suited for
AEDA-3200-Txx Series Ultra Miniature, High Resolution Incremental Encoders
 AEDA-3200-Txx Series Ultra Miniature, High Resolution Incremental Encoders Data Sheet Description The AEDA-3200-T series (top mounting type) are high performance, cost effective, three-channel optical
AEDA-3200-Txx Series Ultra Miniature, High Resolution Incremental Encoders Data Sheet Description The AEDA-3200-T series (top mounting type) are high performance, cost effective, three-channel optical
General-Purpose AC Servo. MELSERVO-JE Servo amplifier INSTRUCTION MANUAL (TROUBLE SHOOTING)
") General-Purpose AC Servo MELSERVO-JE Servo amplifier INSTRUCTION MANUAL (TROUBLE SHOOTING) B Safety Instructions Please read the instructions carefully before using the equipment. To use the equipment
General-Purpose AC Servo MELSERVO-JE Servo amplifier INSTRUCTION MANUAL (TROUBLE SHOOTING) B Safety Instructions Please read the instructions carefully before using the equipment. To use the equipment
General-Purpose AC Servo. MELSERVO-JE Servo amplifier INSTRUCTION MANUAL (TROUBLE SHOOTING)
") General-Purpose AC Servo MELSERVO-JE Servo amplifier INSTRUCTION MANUAL (TROUBLE SHOOTING) B Safety Instructions Please read the instructions carefully before using the equipment. To use the equipment
General-Purpose AC Servo MELSERVO-JE Servo amplifier INSTRUCTION MANUAL (TROUBLE SHOOTING) B Safety Instructions Please read the instructions carefully before using the equipment. To use the equipment
High Performance Current Transducer ITL 900-T = A
 High Performance Current Transducer ITL 900-T For the electronic measurement of currents: DC, AC, pulsed..., with galvanic separation between the primary and the secondary circuit. I PM = 0... 900 A Electrical
High Performance Current Transducer ITL 900-T For the electronic measurement of currents: DC, AC, pulsed..., with galvanic separation between the primary and the secondary circuit. I PM = 0... 900 A Electrical
43000 Series: Size 17 Linear Actuator. Haydon Series Size 17 hybrid linear actuators are our best selling compact hybrid motors.
 Size 17 Captive Shaft 43000 Series: Size 17 Linear Actuator Haydon 43000 Series Size 17 hybrid linear actuators are our best selling compact hybrid motors. The various patented designs deliver high performance,
Size 17 Captive Shaft 43000 Series: Size 17 Linear Actuator Haydon 43000 Series Size 17 hybrid linear actuators are our best selling compact hybrid motors. The various patented designs deliver high performance,
DMMDRV Software User Manual. Version: A10 50 / December 2015 Manual Code: DSFEN A
 DMMDRV Software User Manual Version: A10 50 / December 2015 Manual Code: DSFEN A1050 1215 Contents Section 1. General Software Safety Precautions 1.1 DYN2 System Safety 1.2 DYN4 System Safety 1.3 Servo
DMMDRV Software User Manual Version: A10 50 / December 2015 Manual Code: DSFEN A1050 1215 Contents Section 1. General Software Safety Precautions 1.1 DYN2 System Safety 1.2 DYN4 System Safety 1.3 Servo
Laboratory Seven Stepper Motor and Feedback Control
 EE3940 Microprocessor Systems Laboratory Prof. Andrew Campbell Spring 2003 Groups Names Laboratory Seven Stepper Motor and Feedback Control In this experiment you will experiment with a stepper motor and
EE3940 Microprocessor Systems Laboratory Prof. Andrew Campbell Spring 2003 Groups Names Laboratory Seven Stepper Motor and Feedback Control In this experiment you will experiment with a stepper motor and
Brushed DC Motor PWM Speed Control with the NI myrio, Optical Encoder, and H-Bridge
 Brushed DC Motor PWM Speed Control with the NI myrio, Optical Encoder, and H-Bridge Motor Controller Brushed DC Motor / Encoder System K. Craig 1 Gnd 5 V OR Gate H-Bridge 12 V Bypass Capacitors Flyback
Brushed DC Motor PWM Speed Control with the NI myrio, Optical Encoder, and H-Bridge Motor Controller Brushed DC Motor / Encoder System K. Craig 1 Gnd 5 V OR Gate H-Bridge 12 V Bypass Capacitors Flyback
ECE 511: FINAL PROJECT REPORT GROUP 7 MSP430 TANK
 ECE 511: FINAL PROJECT REPORT GROUP 7 MSP430 TANK Team Members: Andrew Blanford Matthew Drummond Krishnaveni Das Dheeraj Reddy 1 Abstract: The goal of the project was to build an interactive and mobile
ECE 511: FINAL PROJECT REPORT GROUP 7 MSP430 TANK Team Members: Andrew Blanford Matthew Drummond Krishnaveni Das Dheeraj Reddy 1 Abstract: The goal of the project was to build an interactive and mobile
Principles of operation 5
 Principles of operation 5 The following section explains the fundamental principles upon which Solartron Metrology s linear measurement products are based. > Inductive technology (gauging and displacement)
Principles of operation 5 The following section explains the fundamental principles upon which Solartron Metrology s linear measurement products are based. > Inductive technology (gauging and displacement)
 PWB encoders GmbH Am Goldberg 2 D-99817 Eisenach Germany Phone: +49 3691 72580-0 Fax: +49 3691 72580-29 info@pwb-encoders.com www.pwb-encoders.com 1 of 9 Description The ME22 is a reliable low cost optical
PWB encoders GmbH Am Goldberg 2 D-99817 Eisenach Germany Phone: +49 3691 72580-0 Fax: +49 3691 72580-29 info@pwb-encoders.com www.pwb-encoders.com 1 of 9 Description The ME22 is a reliable low cost optical
Digital Readout. Type: BC-01-HS
 Digital Readout Type: BC-01-HS Forgalmazó: Klavio Kft 1046 Budapest Kiss Ernő utca 3. 313/b. Tel.: (1) 390-1023 e-mail: klavio@klavio.hu Weboldal: www.klavio.hu Page 1 Content PAGE 1. Basic features of
Digital Readout Type: BC-01-HS Forgalmazó: Klavio Kft 1046 Budapest Kiss Ernő utca 3. 313/b. Tel.: (1) 390-1023 e-mail: klavio@klavio.hu Weboldal: www.klavio.hu Page 1 Content PAGE 1. Basic features of
I PM. Current Transducer ITZ 5000-SB FLEX ULTRASTAB = 5000 A
 urrent Transducer ITZ 5000-SB FLEX ULTRASTAB I PM = 5000 A For ultra-high precision measurement of current: D, A, pulsed..., with galvanic separation between primary and secondary. Separate magnetic head
urrent Transducer ITZ 5000-SB FLEX ULTRASTAB I PM = 5000 A For ultra-high precision measurement of current: D, A, pulsed..., with galvanic separation between primary and secondary. Separate magnetic head
REV A.1 CMCP810PC SERIES RUNOUT KIT INSTRUCTION MANUAL STI VIBRATION MONITORING INC
 REV A.1 CMCP810PC SERIES RUNOUT KIT INSTRUCTION MANUAL STI VIBRATION MONITORING INC WWW.STIWEB.COM About the Runout Kit The CMCP810PC Series Electrical Runout Kit uses industry standard sensors to detect
REV A.1 CMCP810PC SERIES RUNOUT KIT INSTRUCTION MANUAL STI VIBRATION MONITORING INC WWW.STIWEB.COM About the Runout Kit The CMCP810PC Series Electrical Runout Kit uses industry standard sensors to detect
Simple-H User Manual
 Simple-H User Manual Thank you for your purchase of the Robot Power Simple-H. This manual explains the features and functions of the Simple-H along with some tips for successful application. Before using
Simple-H User Manual Thank you for your purchase of the Robot Power Simple-H. This manual explains the features and functions of the Simple-H along with some tips for successful application. Before using
L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G
 P R O F. S L A C K L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G G B S E E E @ R I T. E D U B L D I N G 9, O F F I C E 0 9-3 1 8 9 ( 5 8 5 ) 4 7 5-5 1 0
P R O F. S L A C K L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G G B S E E E @ R I T. E D U B L D I N G 9, O F F I C E 0 9-3 1 8 9 ( 5 8 5 ) 4 7 5-5 1 0
GSP303D 3-Axis Digital Magnetic Field Transmitter
 Digital Handheld Magnetic Transmitter Transmitter Field Transmitter GSP303D 3-Axis Digital Magnetic Field Transmitter Digital Output (RS485) Accuracy Based on Reading (Not Range) Wide Supply Power: 5 to
Digital Handheld Magnetic Transmitter Transmitter Field Transmitter GSP303D 3-Axis Digital Magnetic Field Transmitter Digital Output (RS485) Accuracy Based on Reading (Not Range) Wide Supply Power: 5 to
Automatic Control Systems 2017 Spring Semester
 Automatic Control Systems 2017 Spring Semester Assignment Set 1 Dr. Kalyana C. Veluvolu Deadline: 11-APR - 16:00 hours @ IT1-815 1) Find the transfer function / for the following system using block diagram
Automatic Control Systems 2017 Spring Semester Assignment Set 1 Dr. Kalyana C. Veluvolu Deadline: 11-APR - 16:00 hours @ IT1-815 1) Find the transfer function / for the following system using block diagram
General-Purpose AC Servo. MELSERVO-J4 Servo amplifier INSTRUCTION MANUAL (TROUBLE SHOOTING)
") General-Purpose AC Servo MELSERVO-J4 Servo amplifier INSTRUCTION MANUAL (TROUBLE SHOOTING) K Safety Instructions Please read the instructions carefully before using the equipment. To use the equipment
General-Purpose AC Servo MELSERVO-J4 Servo amplifier INSTRUCTION MANUAL (TROUBLE SHOOTING) K Safety Instructions Please read the instructions carefully before using the equipment. To use the equipment
Torque Sensor Series 3000 and Series 4000
 Properties Sensorshaft with integrated torque and angle measurement Non-contact measurement system, high robustness Plug & Play solution, no additional electronics required Performance Measurement range
Properties Sensorshaft with integrated torque and angle measurement Non-contact measurement system, high robustness Plug & Play solution, no additional electronics required Performance Measurement range
DSSIU-6-1U. Dedicated 6-channel system interface unit for ultra-stable, high precision fluxgate technology DS series current transducers.
 DSSIU-6-1U Dedicated 6-channel system interface unit for ultra-stable, high precision fluxgate technology DS series current transducers. Powers up to 6 x DS50 to DS2000 at the same time. Supports calibration
DSSIU-6-1U Dedicated 6-channel system interface unit for ultra-stable, high precision fluxgate technology DS series current transducers. Powers up to 6 x DS50 to DS2000 at the same time. Supports calibration
Mercury TM 1500 Digital Output Encoder Systems
 Mercury TM 1500 Digital Output Encoder Systems Factory Set Resolution to 0.50μm Reflective Linear and Rotary Encoders Available with standard 15 pin D-sub connector or Micro connector Sensor the size of
Mercury TM 1500 Digital Output Encoder Systems Factory Set Resolution to 0.50μm Reflective Linear and Rotary Encoders Available with standard 15 pin D-sub connector or Micro connector Sensor the size of
STUDIES ON WAVES AND OSCILLATIONS WITH DATA ACQUISITION SYSTEMS *
 STUDIES ON WAVES AND OSCILLATIONS WITH DATA ACQUISITION SYSTEMS * B. LOGOFĂTU, M. MUNTEANU, M. LOGOFĂTU ODL CREDIS Department, University of Bucharest, Romania E-mail: logofatu@credis.ro, mariusmc@credis.ro
STUDIES ON WAVES AND OSCILLATIONS WITH DATA ACQUISITION SYSTEMS * B. LOGOFĂTU, M. MUNTEANU, M. LOGOFĂTU ODL CREDIS Department, University of Bucharest, Romania E-mail: logofatu@credis.ro, mariusmc@credis.ro
2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control. October 5, 2009 Dr. Harrison H. Chin
 2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control October 5, 2009 Dr. Harrison H. Chin Formal Labs 1. Microcontrollers Introduction to microcontrollers Arduino microcontroller
2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control October 5, 2009 Dr. Harrison H. Chin Formal Labs 1. Microcontrollers Introduction to microcontrollers Arduino microcontroller
Series 7000 Torque Sensor for PTO-shafts
 Properties PTO (Power Take-Off) shaft with integrated torque and angle measurement Non-contact measurement system, high robustness Special for PTO shafts 1 ¾ und 1 3/8 Plug & Play solution, no additional
Properties PTO (Power Take-Off) shaft with integrated torque and angle measurement Non-contact measurement system, high robustness Special for PTO shafts 1 ¾ und 1 3/8 Plug & Play solution, no additional
Signal Conditioning Fundamentals for PC-Based Data Acquisition Systems
 Application Note 048 Signal Conditioning Fundamentals for PC-Based Data Acquisition Systems Introduction PC-based data acquisition (DAQ) systems and plugin boards are used in a very wide range of applications
Application Note 048 Signal Conditioning Fundamentals for PC-Based Data Acquisition Systems Introduction PC-based data acquisition (DAQ) systems and plugin boards are used in a very wide range of applications
DMMDRV 2017 Software User Manual. Version: A1324 / December 2017 Manual Code: DSFEN A
 DMMDRV 2017 Software User Manual Version: A1324 / December 2017 Manual Code: DSFEN A1324 1217 Contents Section 1. General Software Safety Precautions 1.1 DYN2 System Safety 1.2 DYN4 System Safety 1.3 Servo
DMMDRV 2017 Software User Manual Version: A1324 / December 2017 Manual Code: DSFEN A1324 1217 Contents Section 1. General Software Safety Precautions 1.1 DYN2 System Safety 1.2 DYN4 System Safety 1.3 Servo
Data Sheet. HEDR-5xxx High Resolution Series Three Channel Quick Assembly Encoders. Description. Features. Applications
 HEDR-5xxx High Resolution Series Three Channel Quick Assembly Encoders Data Sheet Description The Avago HEDR-5xxx series encoders are higher resolution replacements for our existing low cost HEDS-5xxx
HEDR-5xxx High Resolution Series Three Channel Quick Assembly Encoders Data Sheet Description The Avago HEDR-5xxx series encoders are higher resolution replacements for our existing low cost HEDS-5xxx
JR12 Jam Nut Mount Optical Encoder
 Improving the Quality of Life through the Power in Light JR12 Jam Nut Mount Optical Encoder QPhase Design Features: Replaces Size 15 Pancake Resolver Bearing design simplifies encoder attachment Resolutions
Improving the Quality of Life through the Power in Light JR12 Jam Nut Mount Optical Encoder QPhase Design Features: Replaces Size 15 Pancake Resolver Bearing design simplifies encoder attachment Resolutions
Introduction to the ME2110 Kit. Controller Box Electro Mechanical Actuators & Sensors Pneumatics
 Introduction to the ME2110 Kit Controller Box Electro Mechanical Actuators & Sensors Pneumatics Features of the Controller Box BASIC Stamp II-SX microcontroller Interfaces with various external devices
Introduction to the ME2110 Kit Controller Box Electro Mechanical Actuators & Sensors Pneumatics Features of the Controller Box BASIC Stamp II-SX microcontroller Interfaces with various external devices
Increasing security. Saving space. Gaining flexibility. Signal Conditioners for Industrial Automation
 Increasing security. Saving space. Gaining flexibility. Signal Conditioners for Industrial Automation The SC-System: Interference-Free Signals, Maximum Performance The SC-System from Pepperl+Fuchs offers
Increasing security. Saving space. Gaining flexibility. Signal Conditioners for Industrial Automation The SC-System: Interference-Free Signals, Maximum Performance The SC-System from Pepperl+Fuchs offers
SRA 2250/6 RESISTOR ARS-01 RESISTOR AUTOMATICS
 ELECTRICAL ENGINEERING DIVISION Distribution Network Department SRA 2250/6 RESISTOR ARS-01 RESISTOR AUTOMATICS ELA T150.2 en SRA 2250/6 Resistor specification The SRA 2250/6 Resistor is intended to increase
ELECTRICAL ENGINEERING DIVISION Distribution Network Department SRA 2250/6 RESISTOR ARS-01 RESISTOR AUTOMATICS ELA T150.2 en SRA 2250/6 Resistor specification The SRA 2250/6 Resistor is intended to increase
MicroManager. Torque Mode CTCW/Loadcell Control. Instruction Manual MM3000-CTCW
 MicroManager Torque Mode CTCW/Loadcell Control Instruction Manual MM3000-CTCW Table of Contents 1. General Description... 5 2. Specifications... 5 2.1 Electrical... 5 2.2 Physical... 6 3. Installation...
MicroManager Torque Mode CTCW/Loadcell Control Instruction Manual MM3000-CTCW Table of Contents 1. General Description... 5 2. Specifications... 5 2.1 Electrical... 5 2.2 Physical... 6 3. Installation...
Electronic Systems - B1 23/04/ /04/ SisElnB DDC. Chapter 2
 Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
ELECTRONIC SYSTEMS. Introduction. B1 - Sensors and actuators. Introduction
 Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
Series LC8. Positioning Driver/For AC Servomotor. Compliant actuators/series LJ1, Series LG1, Series LTF
 Positioning Driver/For AC Servomotor Series LC Compliant actuators/series LJ, Series LG, Series LTF Ho to Order Master LC B H N M F 50 W 0 W 00 W Poer voltage 0 VAC/5 VAC 00 VAC/ VAC Command I/O N NPN
Positioning Driver/For AC Servomotor Series LC Compliant actuators/series LJ, Series LG, Series LTF Ho to Order Master LC B H N M F 50 W 0 W 00 W Poer voltage 0 VAC/5 VAC 00 VAC/ VAC Command I/O N NPN
DS200ID-CD100. Specification highlights Symbol Unit Min Typ Max. Features. Applications: Linearity error maximum 2 ppm. MPS for particles accelerators
 Ultra-stable, high precision (ppm class) fluxgate technology DS Series current transducer for non-intrusive, isolated DC and AC current measurement up to 370A Features Linearity error maximum 2 ppm 100
Ultra-stable, high precision (ppm class) fluxgate technology DS Series current transducer for non-intrusive, isolated DC and AC current measurement up to 370A Features Linearity error maximum 2 ppm 100
Data Sheet. HEDL-65xx, HEDM-65xx, HEDS-65xx Series Large Diameter (56 mm), Housed Two and Three Channel Optical Encoders. Description.
, Housed Two and Three Channel Optical Encoders. Description.") HEDL-65xx, HEDM-65xx, HEDS-65xx Series Large Diameter (56 mm), Housed Two and Three Channel Optical Encoders Data Sheet Description The HEDS-65xx/HEDL-65xx are high performance two and three channel optical
HEDL-65xx, HEDM-65xx, HEDS-65xx Series Large Diameter (56 mm), Housed Two and Three Channel Optical Encoders Data Sheet Description The HEDS-65xx/HEDL-65xx are high performance two and three channel optical
Data Sheet MEM 16. Incremental Encoder Magnetic
 Incremental Encoder Magnetic PWB encoders GmbH Am Goldberg 2 D-99817 Eisenach Germany Phone: +49 3691 72580-0 Fax: +49 3691 72580-29 info@pwb-encoders.com MEM16IE Rev.2.1 / 15.12.2016 info@pwb-encoders.com
Incremental Encoder Magnetic PWB encoders GmbH Am Goldberg 2 D-99817 Eisenach Germany Phone: +49 3691 72580-0 Fax: +49 3691 72580-29 info@pwb-encoders.com MEM16IE Rev.2.1 / 15.12.2016 info@pwb-encoders.com
INSTRUCTIONS YASKAWA. Upon receipt of the product and prior to initial operation, read these instructions thoroughly, and retain for future reference.
 YASKAWA DUAL ENCODER (PG) FEEDBACK CARD (PG-Z) INSTRUCTIONS Upon receipt of the product and prior to initial operation, read these instructions thoroughly, and retain for future reference. Package Contents:
YASKAWA DUAL ENCODER (PG) FEEDBACK CARD (PG-Z) INSTRUCTIONS Upon receipt of the product and prior to initial operation, read these instructions thoroughly, and retain for future reference. Package Contents:
1. Enumerate the most commonly used engineering materials and state some important properties and their engineering applications.
 Code No: R05310305 Set No. 1 III B.Tech I Semester Regular Examinations, November 2008 DESIGN OF MACHINE MEMBERS-I ( Common to Mechanical Engineering and Production Engineering) Time: 3 hours Max Marks:
Code No: R05310305 Set No. 1 III B.Tech I Semester Regular Examinations, November 2008 DESIGN OF MACHINE MEMBERS-I ( Common to Mechanical Engineering and Production Engineering) Time: 3 hours Max Marks:
Digital Multimeters R6451A/6452A. R6451A/6452A Digital Multimeters. 5 1/2 Digit DMM Series Enabling Dual Input and Display
 5 1/2 Digit DMM Series Enabling Dual Input and Display R6451A/6452A R6451A: General-Purpose Low-Price DMM with Standard Functions R6452A: Full-Functional DMM with Dual- Channel Input and Dual Display (Photo
5 1/2 Digit DMM Series Enabling Dual Input and Display R6451A/6452A R6451A: General-Purpose Low-Price DMM with Standard Functions R6452A: Full-Functional DMM with Dual- Channel Input and Dual Display (Photo
CALIBRATION PROCEDURE NI PXIe-4330/4331. Contents
 CALIBRATION PROCEURE NI PXIe-4330/4331 Français eutsch ni.com/manuals Contents This document contains information about verifying and adjusting National Instruments NI PXIe-4330/4331 modules using NI-AQmx
CALIBRATION PROCEURE NI PXIe-4330/4331 Français eutsch ni.com/manuals Contents This document contains information about verifying and adjusting National Instruments NI PXIe-4330/4331 modules using NI-AQmx
For the electronic measurement of current: DC, AC, pulsed..., with galvanic separation between the primary and secondary circuit.
 Current Transducer LF 510-S I P N = 500 A For the electronic measurement of current: DC, AC, pulsed..., with galvanic separation between the primary and secondary circuit. Features Bipolar and insulated
Current Transducer LF 510-S I P N = 500 A For the electronic measurement of current: DC, AC, pulsed..., with galvanic separation between the primary and secondary circuit. Features Bipolar and insulated
NOVOHALL Rotary Sensor touchless transmissive. Series RFX-6900
 NOVOHALL Rotary Sensor touchless transmissive Series RFX-6900 Special features Very robust design to extreme environmental conditions Touchless hall technology Electrical range up to 360, in single and
NOVOHALL Rotary Sensor touchless transmissive Series RFX-6900 Special features Very robust design to extreme environmental conditions Touchless hall technology Electrical range up to 360, in single and
For the electronic measurement of current: DC, AC, pulsed..., with galvanic separation between the primary and the secondary circuit.
 Current Transducer IN 1000-S I P N = 1000 A For the electronic measurement of current: DC, AC, pulsed..., with galvanic separation between the primary and the secondary circuit. Features Closed loop (compensated)
Current Transducer IN 1000-S I P N = 1000 A For the electronic measurement of current: DC, AC, pulsed..., with galvanic separation between the primary and the secondary circuit. Features Closed loop (compensated)
FEATURES OPTIONAL FEATURES
 -00--0 B Series The Assured Automation B Series electric valve actuators offer a rugged design for quarter turn industrial applications. Designed for use on quarter turn (0 ) ball valves, butterfly valves,
-00--0 B Series The Assured Automation B Series electric valve actuators offer a rugged design for quarter turn industrial applications. Designed for use on quarter turn (0 ) ball valves, butterfly valves,
Ultrasonic. Advantages
 Ultrasonic Advantages Non-Contact: Nothing touches the target object Measures Distance: The distance to the target is measured, not just its presence Long and Short Range: Objects can be sensed from 2
Ultrasonic Advantages Non-Contact: Nothing touches the target object Measures Distance: The distance to the target is measured, not just its presence Long and Short Range: Objects can be sensed from 2