Introduction to the ME2110 Kit. Controller Box Electro Mechanical Actuators & Sensors Pneumatics
|
|
|
- Anis Stokes
- 5 years ago
- Views:
Transcription

1 Introduction to the ME2110 Kit Controller Box Electro Mechanical Actuators & Sensors Pneumatics
2 Features of the Controller Box BASIC Stamp II-SX microcontroller Interfaces with various external devices Stepper Motors DC Motors Pneumatic Valves IR Distance Sensor Flex Sensor Microswitches Solenoids RS-232 Communication Port
3 P11 P12 P14 P13 P15 Outputs RF / RS-232 Selector Motor_1 P9 - Speaker ID Reset Motor_2 P7 - Start Battery Charger RS-232 Connector On / Off Switch Inputs P6 P5 P4 P3 P8 P1 Layout of I/O Ports
4 Connections Interfacing the BASIC Stamp P1: Flex Sensor P3-P6: Microswitches P7: Microswitch that will be used to start competition P8: Distance Sensor P9: Speaker P11-P15: Solenoids, DC Motors Large Plugs: Stepper Motors RF / RS-232 Selector P9 - Speaker P7 - Start RS-232 Connector P11 P12 P14 P13 P15 ID Reset P6 P5 P4 P8 P3 P1 Motor_1 Motor_2 Battery Charger On / Off Sw itc h
5 Electro/Mechanical Supplies

6 Microswitches Lever arm closes circuit Status of IN register holds status of port 0 = Open Circuit 1 = Closed Circuit Same action is going to start competition


7 Solenoids Consists of a coil of wire Electromagnet When powered up, pulls in plunger.


8 Speed is proportional to voltage Moves in one direction Gearbox to slow down shaft Very high torque Requires time to ramp up and down. DC Motors

9 DC Brush Motor Fixed Field Magnet Coils create an electromagnet Field magnet rotates armature As armature turns, polarity reverses Cycle continues.
10 Pulse Width Modulation (PWM) Controller box can only send 0 or 5 volts PWM is used to run motor at intermediate speeds PWM uses cycles of pulses. 5 Volts 0 Volts Off On One Cycle

11 Both motors are controlled through P10 Speed is a value chosen between 2 and 240 Can move both directions Negligible ramping time Low Power Stepper Motors
12 Stepper Motor Clockwise Rotation Reverse Process for Counterclockwise Rotation

13 Detects deflection Works like a strain gage Flex Sensor Resistance changes with deflection Voltage reading sent through A/D converter 12-bit output (0 4095)

14 4 to 31 Range Infrared Distance Sensor Infrared beam is emitted Beam reflects off object Detected by receiver Output voltage proportional to distance A/D Converter: Reading between 0 and 255.
15 A/D Converter Converts a continuous voltage to a multi-level discrete digital value Used with: Distance Sensor (0-255) Flex Sensor (0-4095) Use these values to convert to desired quantities using conversion factors.


16 A/D Converter
17 Power up chip Using the A/D Converter Choose channel Serially send a Take Reading command Serially receive the value Power down chip
18 Programming the Stamp PBASIC (a version of BASIC) is used to program the Stamp Everything is global Variables Constants Subroutines Programming and commenting style is very important Programming syntax is explained in the manual.

19 Programming Editor Save Run Motor 1 Read Flex Sensor Release Alien Whacker Grab Viruses Transfer Humans to Safety Transfer to Controller Box
20 Program Structure Constants Table Constants are substituted at compile time Variable declaration Reserves portions of the Stamp s limited memory Main program loop Subroutines Often much of the work is done in subroutines
21 Variables Variables are memory reservations on the BASIC Stamp Variables must be declared before they can be used Variable types are: Word (16 bits): Byte (8 bits): Nibble (4 bits): 0-7 Bit: 0-1
22 Bytes, Nibbles, and Bits 1 byte = 2 nibbles = 8 bits: High Nibble Low Nibble B7 B6 B5 B4 B3 B2 B1 B0 Most Significant Bit (MSB) Least Significant Bit (LSB)
23 Words and Bytes 1 word = 2 bytes = 4 nibbles = 16 bits: High Byte Low Byte Word
24 Selected Commands Branching If Then Goto GoSub Return Looping For Next Debugging Debug Sounds (Music) Freqout DC Motor Control PWM Digital I/O Input, Output High, Low Serial I/O Serout Shiftin, Shiftout Time Pause Power Management End
25 Best Way to Learn is to Do Read through the manual Examine the sample programs and program fragments Studio assignment Ask questions Additional Information (BASIC Stamp)

26 Pneumatic Supplies

27 Pressurized Extension Spring Return 2.5 in Stroke Pneumatic Actuator

28 Pressure Vessel Pressurize with Bike Pump Max 100 psi Supplies Actuator strokes


29 Pneumatic Valve
30 Machining Studio Goals: Learn to Respect Machine Tools Learn to Cut Gain Experience Generate Design Ideas Build Confidence Preserve Digits
31 The Coupler 1/2-20 UNF 6-32 UNC THRU φ DP ± 1/ All tolerances ±0.010 unless otherwise specified
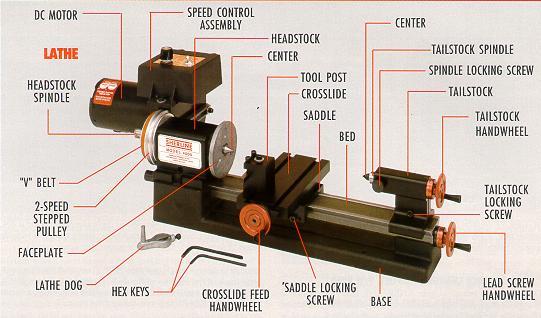
32 The Lathe

33 The Bracket
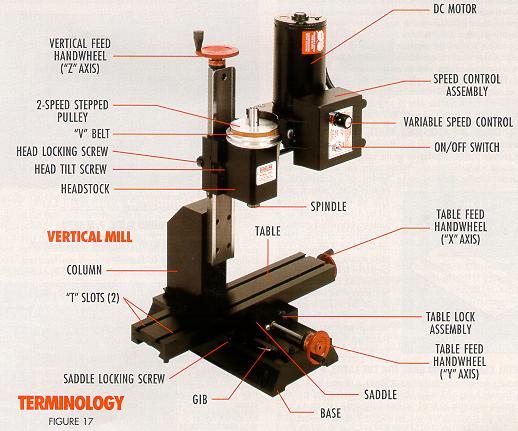
34 The Mill
ME 2110 Controller Box Manual. Version 2.3
 ME 2110 Controller Box Manual Version 2.3 I. Introduction to the ME 2110 Controller Box A. The Controller Box B. The Programming Editor & Writing PBASIC Programs C. Debugging Controller Box Problems II.
ME 2110 Controller Box Manual Version 2.3 I. Introduction to the ME 2110 Controller Box A. The Controller Box B. The Programming Editor & Writing PBASIC Programs C. Debugging Controller Box Problems II.
Supply Kit Project: Pneumatic Launcher
 GEORGIA INSTITUTE OF TECHNOLOGY George W. Woodruff School of Mechanical Engineering ME 2110 Creative Decisions and Design Spring 2010 Supply Kit Project: Pneumatic Launcher In order to successfully design
GEORGIA INSTITUTE OF TECHNOLOGY George W. Woodruff School of Mechanical Engineering ME 2110 Creative Decisions and Design Spring 2010 Supply Kit Project: Pneumatic Launcher In order to successfully design
EXPERIMENT 6: Advanced I/O Programming
 EXPERIMENT 6: Advanced I/O Programming Objectives: To familiarize students with DC Motor control and Stepper Motor Interfacing. To utilize MikroC and MPLAB for Input Output Interfacing and motor control.
EXPERIMENT 6: Advanced I/O Programming Objectives: To familiarize students with DC Motor control and Stepper Motor Interfacing. To utilize MikroC and MPLAB for Input Output Interfacing and motor control.
Contents. Part list 2 Preparartion 4 izebot. izebot Collision detection via Switch. izebot Serial Communication. izebot Remote Control
 Contents Part list 2 Preparartion 4 izebot Activity #1 : Building izebot 9 Activity #2 : izebot motor driveing 11 Activity #3 : izebot Moving 13 izebot Collision detection via Switch Activity #4 : Installing
Contents Part list 2 Preparartion 4 izebot Activity #1 : Building izebot 9 Activity #2 : izebot motor driveing 11 Activity #3 : izebot Moving 13 izebot Collision detection via Switch Activity #4 : Installing
Directions for Wiring and Using The GEARS II (2) Channel Combination Controllers
 Channel Combination Controllers") Directions for Wiring and Using The GEARS II (2) Channel Combination Controllers PWM Input Signal Cable for the Valve Controller Plugs into the RC Receiver or Microprocessor Signal line. White = PWM Input
Directions for Wiring and Using The GEARS II (2) Channel Combination Controllers PWM Input Signal Cable for the Valve Controller Plugs into the RC Receiver or Microprocessor Signal line. White = PWM Input
Studio 2 - Pneumatic Launcher
 GEORGIA INSTITUTE OF TECHNOLOGY George W. Woodruff School of Mechanical Engineering ME 2110 Creative Decisions and Design Summer 2010 Studio 2 - Pneumatic Launcher In order to successfully design and build
GEORGIA INSTITUTE OF TECHNOLOGY George W. Woodruff School of Mechanical Engineering ME 2110 Creative Decisions and Design Summer 2010 Studio 2 - Pneumatic Launcher In order to successfully design and build
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators
 Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
In this activity, you will program the BASIC Stamp to control the rotation of each of the Parallax pre-modified servos on the Boe-Bot.
 Week 3 - How servos work Testing the Servos Individually In this activity, you will program the BASIC Stamp to control the rotation of each of the Parallax pre-modified servos on the Boe-Bot. How Servos
Week 3 - How servos work Testing the Servos Individually In this activity, you will program the BASIC Stamp to control the rotation of each of the Parallax pre-modified servos on the Boe-Bot. How Servos
DMC-8 (SKU#ROB )
") DMC-8 (SKU#ROB-01-007) Selectable serial or parallel interface Use with Microcontroller or PC Controls 2 DC motors For 5 24 Volt Motors 8 Amps per channel Windows software included Fuse protection Dual
DMC-8 (SKU#ROB-01-007) Selectable serial or parallel interface Use with Microcontroller or PC Controls 2 DC motors For 5 24 Volt Motors 8 Amps per channel Windows software included Fuse protection Dual
Compass Module AppMod (#29113) Electro-Mechanical Compass
 Electro-Mechanical Compass") 599 Menlo Drive, Suite 100 Rocklin, California 95765, USA Office: (916) 624-8333 Fax: (916) 624-8003 General: info@parallax.com Technical: support@parallax.com Web Site: www.parallax.com Educational: www.parallax.com/sic
599 Menlo Drive, Suite 100 Rocklin, California 95765, USA Office: (916) 624-8333 Fax: (916) 624-8003 General: info@parallax.com Technical: support@parallax.com Web Site: www.parallax.com Educational: www.parallax.com/sic
PREREQUISITES: MODULE 10: MICROCONTROLLERS II; MODULE 14: DISCRETE COMPONENTS. MODULE 13 (SENSORS) WOULD ALSO BE HELPFUL.
 WOULD ALSO BE HELPFUL.") ELECTROMECHANICAL SYSTEMS PREREQUISITES: MODULE 10: MICROCONTROLLERS II; MODULE 14: DISCRETE COMPONENTS. MODULE 13 (SENSORS) WOULD ALSO BE HELPFUL. OUTLINE OF MODULE 17: What you will learn about in this
ELECTROMECHANICAL SYSTEMS PREREQUISITES: MODULE 10: MICROCONTROLLERS II; MODULE 14: DISCRETE COMPONENTS. MODULE 13 (SENSORS) WOULD ALSO BE HELPFUL. OUTLINE OF MODULE 17: What you will learn about in this
Georgia Institute of Technology George W. Woodruff School of Mechanical Engineering ME Creative Decisions and Design Summer 2013 STUDIO II
 Georgia Institute of Technology George W. Woodruff School of Mechanical Engineering ME 2110 - Creative Decisions and Design Summer 2013 STUDIO II MACHINING & MECHACTRONICS PROJECT: HALF-TIME SHOW SHOOTING
Georgia Institute of Technology George W. Woodruff School of Mechanical Engineering ME 2110 - Creative Decisions and Design Summer 2013 STUDIO II MACHINING & MECHACTRONICS PROJECT: HALF-TIME SHOW SHOOTING
The Mechatronics Sorter Team Members John Valdez Hugo Ramirez Peter Verbiest Quyen Chu
 The Mechatronics Sorter Team Members John Valdez Hugo Ramirez Peter Verbiest Quyen Chu Professor B.J. Furman Course ME 106 Date 12.9.99 Table of Contents Description Section Title Page - Table of Contents
The Mechatronics Sorter Team Members John Valdez Hugo Ramirez Peter Verbiest Quyen Chu Professor B.J. Furman Course ME 106 Date 12.9.99 Table of Contents Description Section Title Page - Table of Contents
EEE3410 Microcontroller Applications Department of Electrical Engineering Lecture 11 Motor Control
 EEE34 Microcontroller Applications Department of Electrical Engineering Lecture Motor Control Week 3 EEE34 Microcontroller Applications In this Lecture. Interface 85 with the following output Devices Optoisolator
EEE34 Microcontroller Applications Department of Electrical Engineering Lecture Motor Control Week 3 EEE34 Microcontroller Applications In this Lecture. Interface 85 with the following output Devices Optoisolator
Lecture 10. Thermal Sensors
 Lecture 10 Thermal Sensors DS1620 Digital thermometer Provides 9-bit temperature readings Temperature range from -55 o C to 125 o C Acts as a thermostat Detail Description DS1620 with BS2 Programming for
Lecture 10 Thermal Sensors DS1620 Digital thermometer Provides 9-bit temperature readings Temperature range from -55 o C to 125 o C Acts as a thermostat Detail Description DS1620 with BS2 Programming for
Ch 5 Hardware Components for Automation
 Ch 5 Hardware Components for Automation Sections: 1. Sensors 2. Actuators 3. Analog-to-Digital Conversion 4. Digital-to-Analog Conversion 5. Input/Output Devices for Discrete Data Computer-Process Interface
Ch 5 Hardware Components for Automation Sections: 1. Sensors 2. Actuators 3. Analog-to-Digital Conversion 4. Digital-to-Analog Conversion 5. Input/Output Devices for Discrete Data Computer-Process Interface
2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control. October 5, 2009 Dr. Harrison H. Chin
 2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control October 5, 2009 Dr. Harrison H. Chin Formal Labs 1. Microcontrollers Introduction to microcontrollers Arduino microcontroller
2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control October 5, 2009 Dr. Harrison H. Chin Formal Labs 1. Microcontrollers Introduction to microcontrollers Arduino microcontroller
ZX-SERVO16. Features : Packing List. Before You Begin
 Features : ZX-SERVO16 Runtime Selectable Baud rate. 2400 to 38k4 Baud. 16 Servos. All servos driven simultaneously all of the time. 180 degrees of rotation. Servo Ramping. 63 ramp rates (0.75-60 seconds)
Features : ZX-SERVO16 Runtime Selectable Baud rate. 2400 to 38k4 Baud. 16 Servos. All servos driven simultaneously all of the time. 180 degrees of rotation. Servo Ramping. 63 ramp rates (0.75-60 seconds)
Hitachi HM55B Compass Module (#29123)
") Web Site: www.parallax.com Forums: forums@parallax.com Sales: sales@parallax.com Technical: support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Web Site: www.parallax.com Forums: forums@parallax.com Sales: sales@parallax.com Technical: support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Electronic regulator for PWM controlled proportional solenoid valves FABER -
 Electronic regulator for PWM controlled proportional solenoid valves STU Control Unit FABER - COM DESCRIPTION STU-PWM electronic card is a regulator for proportional solenoid valves, which can drive up
Electronic regulator for PWM controlled proportional solenoid valves STU Control Unit FABER - COM DESCRIPTION STU-PWM electronic card is a regulator for proportional solenoid valves, which can drive up
Microcontroller interfacing
 Introduction to Microcontroller interfacing Prepared By : Eng : Ahmed Youssef Alaa El-Din Youssef El-Kashef Date : 20/08/2011 Contents What is a PIC Microcontroller? Simple Microcontroller Standard Interfacing
Introduction to Microcontroller interfacing Prepared By : Eng : Ahmed Youssef Alaa El-Din Youssef El-Kashef Date : 20/08/2011 Contents What is a PIC Microcontroller? Simple Microcontroller Standard Interfacing
Week 2 in Studio (8/29-9/2)
") Georgia Institute of Technology George W. Woodruff School of Mechanical Engineering ME 2110 - Creative Decisions and Design Fall 2011 STUDIO II MACHINING & ELECTRONICS PROJECT: PNEUMATIC LAUNCHER In order
Georgia Institute of Technology George W. Woodruff School of Mechanical Engineering ME 2110 - Creative Decisions and Design Fall 2011 STUDIO II MACHINING & ELECTRONICS PROJECT: PNEUMATIC LAUNCHER In order
the Board of Education
 the Board of Education Voltage regulator electrical power (V dd, V in, V ss ) breadboard (for building circuits) power jack digital input / output pins 0 to 15 reset button Three-position switch 0 = OFF
the Board of Education Voltage regulator electrical power (V dd, V in, V ss ) breadboard (for building circuits) power jack digital input / output pins 0 to 15 reset button Three-position switch 0 = OFF
Georgia Institute of Technology George W. Woodruff School of Mechanical Engineering ME Creative Decisions and Design. Fall 2012 STUDIO II
 Georgia Institute of Technology George W. Woodruff School of Mechanical Engineering ME 2110 - Creative Decisions and Design Fall 2012 STUDIO II MACHINING & MECHACTRONICS PROJECT: ANGRY BIRDS LAUNCHER In
Georgia Institute of Technology George W. Woodruff School of Mechanical Engineering ME 2110 - Creative Decisions and Design Fall 2012 STUDIO II MACHINING & MECHACTRONICS PROJECT: ANGRY BIRDS LAUNCHER In
العطاء رقم )7106/67( الخاص بشراء أجهز لقسم الهندسة الكهربائية على حساب البحث العلمي
7106/67( الخاص بشراء أجهز لقسم الهندسة الكهربائية على حساب البحث العلمي") العطاء رقم )7106/67( الخاص بشراء أجهز لقسم الهندسة الكهربائية على حساب البحث العلمي رقم )7107/363( Page 1 of 6 1- Mechatronics Actuators Board & Mechatronics Systems Board with Education Laboratory for
العطاء رقم )7106/67( الخاص بشراء أجهز لقسم الهندسة الكهربائية على حساب البحث العلمي رقم )7107/363( Page 1 of 6 1- Mechatronics Actuators Board & Mechatronics Systems Board with Education Laboratory for
MECHATRONICS IN A BOX
 MECHATRONICS IN A BOX A Complete Mechatronics Solution for the Classroom amtekcompany.com Contents Introduction Programming Arduino microcontrollers Motor Control Training Course Flowcode 8 Formula AllCode
MECHATRONICS IN A BOX A Complete Mechatronics Solution for the Classroom amtekcompany.com Contents Introduction Programming Arduino microcontrollers Motor Control Training Course Flowcode 8 Formula AllCode
HB-25 Motor Controller (#29144)
") Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical: support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical: support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
EE-110 Introduction to Engineering & Laboratory Experience Saeid Rahimi, Ph.D. Labs Introduction to Arduino
 EE-110 Introduction to Engineering & Laboratory Experience Saeid Rahimi, Ph.D. Labs 10-11 Introduction to Arduino In this lab we will introduce the idea of using a microcontroller as a tool for controlling
EE-110 Introduction to Engineering & Laboratory Experience Saeid Rahimi, Ph.D. Labs 10-11 Introduction to Arduino In this lab we will introduce the idea of using a microcontroller as a tool for controlling
AppKit: Using the LTC bit Analog-to-Digital Converter
 AppKit: Using the LTC1298 12-bit Analog-to-Digital Converter This AppKit shows how to use the Linear Technology LTC 1298 12-bit ADC chip with PIC microcontrollers and the Parallax BASIC Stamp single-board
AppKit: Using the LTC1298 12-bit Analog-to-Digital Converter This AppKit shows how to use the Linear Technology LTC 1298 12-bit ADC chip with PIC microcontrollers and the Parallax BASIC Stamp single-board
Programmable Control Introduction
 Programmable Control Introduction By the end of this unit you should be able to: Give examples of where microcontrollers are used Recognise the symbols for different processes in a flowchart Construct
Programmable Control Introduction By the end of this unit you should be able to: Give examples of where microcontrollers are used Recognise the symbols for different processes in a flowchart Construct
Introduction to Arduino HW Labs
 Introduction to Arduino HW Labs In the next six lab sessions, you ll attach sensors and actuators to your Arduino processor This session provides an overview for the devices LED indicators Text/Sound Output
Introduction to Arduino HW Labs In the next six lab sessions, you ll attach sensors and actuators to your Arduino processor This session provides an overview for the devices LED indicators Text/Sound Output
Need Analog Output from the Stamp? Dial it in with a Digital Potentiometer Using the DS1267 potentiometer as a versatile digital-to-analog converter
 Column #18, August 1996 by Scott Edwards: Need Analog Output from the Stamp? Dial it in with a Digital Potentiometer Using the DS1267 potentiometer as a versatile digital-to-analog converter GETTING AN
Column #18, August 1996 by Scott Edwards: Need Analog Output from the Stamp? Dial it in with a Digital Potentiometer Using the DS1267 potentiometer as a versatile digital-to-analog converter GETTING AN
Jaguar Motor Controller (Stellaris Brushed DC Motor Control Module with CAN)
") Jaguar Motor Controller (Stellaris Brushed DC Motor Control Module with CAN) 217-3367 Ordering Information Product Number Description 217-3367 Stellaris Brushed DC Motor Control Module with CAN (217-3367)
Jaguar Motor Controller (Stellaris Brushed DC Motor Control Module with CAN) 217-3367 Ordering Information Product Number Description 217-3367 Stellaris Brushed DC Motor Control Module with CAN (217-3367)
Arduino Control of Tetrix Prizm Robotics. Motors and Servos Introduction to Robotics and Engineering Marist School
 Arduino Control of Tetrix Prizm Robotics Motors and Servos Introduction to Robotics and Engineering Marist School Motor or Servo? Motor Faster revolution but less Power Tetrix 12 Volt DC motors have a
Arduino Control of Tetrix Prizm Robotics Motors and Servos Introduction to Robotics and Engineering Marist School Motor or Servo? Motor Faster revolution but less Power Tetrix 12 Volt DC motors have a
Feedback Devices. By John Mazurkiewicz. Baldor Electric
 Feedback Devices By John Mazurkiewicz Baldor Electric Closed loop systems use feedback signals for stabilization, speed and position information. There are a variety of devices to provide this data, such
Feedback Devices By John Mazurkiewicz Baldor Electric Closed loop systems use feedback signals for stabilization, speed and position information. There are a variety of devices to provide this data, such
Sorting Line with Detection 9V
 536628 Sorting Line with Detection 9V I2 O8 I1 I3 C1 I5 I6 I4 Not in the picture: O5, O6, O7, O8 Circuit layout for Sorting Line with Detection Terminal no. Function Input/Output 1 color sensor I1 2 phototransistor
536628 Sorting Line with Detection 9V I2 O8 I1 I3 C1 I5 I6 I4 Not in the picture: O5, O6, O7, O8 Circuit layout for Sorting Line with Detection Terminal no. Function Input/Output 1 color sensor I1 2 phototransistor
Chapter 2: Your Boe-Bot's Servo Motors
 Chapter 2: Your Boe-Bot's Servo Motors Vocabulary words used in this lesson. Argument in computer science is a value of data that is part of a command. Also data passed to a procedure or function at the
Chapter 2: Your Boe-Bot's Servo Motors Vocabulary words used in this lesson. Argument in computer science is a value of data that is part of a command. Also data passed to a procedure or function at the
Actuators in Automatic Control System
 Actuators in Automatic Control System Measurement & Control Systems Transducers Measurement Process Actuators Data processing Requirement analyses Decision making Control actions CONTROL action requires
Actuators in Automatic Control System Measurement & Control Systems Transducers Measurement Process Actuators Data processing Requirement analyses Decision making Control actions CONTROL action requires
Figure 1. CheapBot Smart Proximity Detector
 The CheapBot Smart Proximity Detector is a plug-in single-board sensor for almost any programmable robotic brain. With it, robots can detect the presence of a wall extending across the robot s path or
The CheapBot Smart Proximity Detector is a plug-in single-board sensor for almost any programmable robotic brain. With it, robots can detect the presence of a wall extending across the robot s path or
The Datasheet and Interfacing EE3376
 The Datasheet and Interfacing EE3376 MSP430 Datasheet Modes of the MSP430 Active Mode (this class) LPM0 (CPU asleep) LPM3 (only ACLK on) LPM4 (sleep mode) 0 0 0 0 250uA 0 0 0 1 35 ua 1 1 0 1 1 ua 1 1 1
The Datasheet and Interfacing EE3376 MSP430 Datasheet Modes of the MSP430 Active Mode (this class) LPM0 (CPU asleep) LPM3 (only ACLK on) LPM4 (sleep mode) 0 0 0 0 250uA 0 0 0 1 35 ua 1 1 0 1 1 ua 1 1 1
Motors and Servos Part 2: DC Motors
 Motors and Servos Part 2: DC Motors Back to Motors After a brief excursion into serial communication last week, we are returning to DC motors this week. As you recall, we have already worked with servos
Motors and Servos Part 2: DC Motors Back to Motors After a brief excursion into serial communication last week, we are returning to DC motors this week. As you recall, we have already worked with servos
SMART Funded by The National Science Foundation
 Lecture 5 Capacitors 1 Store electric charge Consists of two plates of a conducting material separated by a space filled by an insulator Measured in units called farads, F Capacitors 2 Mylar Ceramic Electrolytic
Lecture 5 Capacitors 1 Store electric charge Consists of two plates of a conducting material separated by a space filled by an insulator Measured in units called farads, F Capacitors 2 Mylar Ceramic Electrolytic
Experiment #3: Micro-controlled Movement
 Experiment #3: Micro-controlled Movement So we re already on Experiment #3 and all we ve done is blinked a few LED s on and off. Hang in there, something is about to move! As you know, an LED is an output
Experiment #3: Micro-controlled Movement So we re already on Experiment #3 and all we ve done is blinked a few LED s on and off. Hang in there, something is about to move! As you know, an LED is an output
Controlling Your Robot
 Controlling Your Robot The activities on this week are about instructing the Boe-Bot where to go and how to get there. You will write programs to make the Boe-Bot perform a variety of maneuvers. You will
Controlling Your Robot The activities on this week are about instructing the Boe-Bot where to go and how to get there. You will write programs to make the Boe-Bot perform a variety of maneuvers. You will
Advanced Mechatronics 1 st Mini Project. Remote Control Car. Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014
 Advanced Mechatronics 1 st Mini Project Remote Control Car Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014 Remote Control Car Manual Control with the remote and direction buttons Automatic
Advanced Mechatronics 1 st Mini Project Remote Control Car Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014 Remote Control Car Manual Control with the remote and direction buttons Automatic
Electro-hydraulic Servo Valve Systems
 Fluidsys Training Centre, Bangalore offers an extensive range of skill-based and industry-relevant courses in the field of Pneumatics and Hydraulics. For more details, please visit the website: https://fluidsys.org
Fluidsys Training Centre, Bangalore offers an extensive range of skill-based and industry-relevant courses in the field of Pneumatics and Hydraulics. For more details, please visit the website: https://fluidsys.org
UNIVERSITY OF JORDAN Mechatronics Engineering Department Measurements & Control Lab Experiment no.1 DC Servo Motor
 UNIVERSITY OF JORDAN Mechatronics Engineering Department Measurements & Control Lab. 0908448 Experiment no.1 DC Servo Motor OBJECTIVES: The aim of this experiment is to provide students with a sound introduction
UNIVERSITY OF JORDAN Mechatronics Engineering Department Measurements & Control Lab. 0908448 Experiment no.1 DC Servo Motor OBJECTIVES: The aim of this experiment is to provide students with a sound introduction
Introduction to MS150
 Introduction to MS150 Objective: To become familiar with the modules and how they operate. Equipment Required: Following equipment is required to perform above task. Quantity Apparatus 1 OU150A Operation
Introduction to MS150 Objective: To become familiar with the modules and how they operate. Equipment Required: Following equipment is required to perform above task. Quantity Apparatus 1 OU150A Operation
WEEK 5 Remembering Long Lists Using EEPROM
 WEEK 5 Remembering Long Lists Using EEPROM EEPROM stands for Electrically Erasable Programmable Read Only Memory. It is a small black chip on the BASIC Stamp II module labeled 24LC16B. It is used to store
WEEK 5 Remembering Long Lists Using EEPROM EEPROM stands for Electrically Erasable Programmable Read Only Memory. It is a small black chip on the BASIC Stamp II module labeled 24LC16B. It is used to store
Brushed DC Motor Control. Module with CAN (MDL-BDC24)
") Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) Ordering Information Product No. MDL-BDC24 RDK-BDC24 Description Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) for Single-Unit
Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) Ordering Information Product No. MDL-BDC24 RDK-BDC24 Description Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) for Single-Unit
EEL4914 Senior Design. Final Design Report
 EEL4914 Senior Design Final Design Report Electric Super Bike The Best Team in the World Matt Fisher madfish@ufl.edu Richard Orr gautama@ufl.edu 21 April 2008 1 Contents Contents...2 Abstract...3 Project
EEL4914 Senior Design Final Design Report Electric Super Bike The Best Team in the World Matt Fisher madfish@ufl.edu Richard Orr gautama@ufl.edu 21 April 2008 1 Contents Contents...2 Abstract...3 Project
EE 314 Spring 2003 Microprocessor Systems
 EE 314 Spring 2003 Microprocessor Systems Laboratory Project #9 Closed Loop Control Overview and Introduction This project will bring together several pieces of software and draw on knowledge gained in
EE 314 Spring 2003 Microprocessor Systems Laboratory Project #9 Closed Loop Control Overview and Introduction This project will bring together several pieces of software and draw on knowledge gained in
' Turn off A/D converters (thereby allowing use of pins for I/O) ANSEL = 0
 ANSEL = 0") dc_motor.bas (PIC16F88 microcontroller) Design Example Position and Speed Control of a dc Servo Motor. The user interface includes a keypad for data entry and an LCD for text messages. The main menu offers
dc_motor.bas (PIC16F88 microcontroller) Design Example Position and Speed Control of a dc Servo Motor. The user interface includes a keypad for data entry and an LCD for text messages. The main menu offers
Microcontroller Based Electric Expansion Valve Controller for Air Conditioning System
 Microcontroller Based Electric Expansion Valve Controller for Air Conditioning System Thae Su Aye, and Zaw Myo Lwin Abstract In the air conditioning system, the electric expansion valve (EEV) is one of
Microcontroller Based Electric Expansion Valve Controller for Air Conditioning System Thae Su Aye, and Zaw Myo Lwin Abstract In the air conditioning system, the electric expansion valve (EEV) is one of
Laboratory Tutorial#1
 Laboratory Tutorial#1 1.1. Objective: To become familiar with the modules and how they operate. 1.2. Equipment Required: Following equipment is required to perform above task. Quantity Apparatus 1 OU150A
Laboratory Tutorial#1 1.1. Objective: To become familiar with the modules and how they operate. 1.2. Equipment Required: Following equipment is required to perform above task. Quantity Apparatus 1 OU150A
B RoboClaw 2 Channel 30A Motor Controller Data Sheet
 B0098 - RoboClaw 2 Channel 30A Motor Controller (c) 2010 BasicMicro. All Rights Reserved. Feature Overview: 2 Channel at 30Amp, Peak 60Amp Battery Elimination Circuit (BEC) Switching Mode BEC Hobby RC
B0098 - RoboClaw 2 Channel 30A Motor Controller (c) 2010 BasicMicro. All Rights Reserved. Feature Overview: 2 Channel at 30Amp, Peak 60Amp Battery Elimination Circuit (BEC) Switching Mode BEC Hobby RC
Parallax Servo Controller (#28023) Rev B 16-Channel Servo Control with Ramping
 Rev B 16-Channel Servo Control with Ramping") 599 Menlo Drive, Suite 100 Rocklin, California 95765, USA Office: (916) 6248333 Fax: (916) 6248003 General: info@parallax.com Technical: support@parallax.com Web Site: www.parallax.com Educational: www.parallax.com/sic
599 Menlo Drive, Suite 100 Rocklin, California 95765, USA Office: (916) 6248333 Fax: (916) 6248003 General: info@parallax.com Technical: support@parallax.com Web Site: www.parallax.com Educational: www.parallax.com/sic
Serial Communication AS5132 Rotary Magnetic Position Sensor
 Serial Communication AS5132 Rotary Magnetic Position Sensor Stephen Dunn 11/13/2015 The AS5132 is a rotary magnetic position sensor capable of measuring the absolute rotational angle of a magnetic field
Serial Communication AS5132 Rotary Magnetic Position Sensor Stephen Dunn 11/13/2015 The AS5132 is a rotary magnetic position sensor capable of measuring the absolute rotational angle of a magnetic field
Infrared Remote AppKit (#29122)
") Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical: support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical: support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Separately Excited DC Motor for Electric Vehicle Controller Design Yulan Qi
 6th International Conference on Sensor etwork and Computer Engineering (ICSCE 2016) Separately Excited DC Motor for Electric Vehicle Controller Design ulan Qi Wuhan Textile University, Wuhan, China Keywords:
6th International Conference on Sensor etwork and Computer Engineering (ICSCE 2016) Separately Excited DC Motor for Electric Vehicle Controller Design ulan Qi Wuhan Textile University, Wuhan, China Keywords:
B Robo Claw 2 Channel 25A Motor Controller Data Sheet
 B0098 - Robo Claw 2 Channel 25A Motor Controller Feature Overview: 2 Channel at 25A, Peak 30A Hobby RC Radio Compatible Serial Mode TTL Input Analog Mode 2 Channel Quadrature Decoding Thermal Protection
B0098 - Robo Claw 2 Channel 25A Motor Controller Feature Overview: 2 Channel at 25A, Peak 30A Hobby RC Radio Compatible Serial Mode TTL Input Analog Mode 2 Channel Quadrature Decoding Thermal Protection
InnobotTM User s Manual
 InnobotTM User s Manual Document Rev. 2.0 Apr. 15, 2014 Trademark Innovati,, and BASIC Commander are registered trademarks of Innovati, Inc. InnoBASIC, cmdbus, Innobot and Explore Board are trademarks
InnobotTM User s Manual Document Rev. 2.0 Apr. 15, 2014 Trademark Innovati,, and BASIC Commander are registered trademarks of Innovati, Inc. InnoBASIC, cmdbus, Innobot and Explore Board are trademarks
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Actuators. EECS461, Lecture 5, updated September 16,
 Actuators The other side of the coin from sensors... Enable a microprocessor to modify the analog world. Examples: - speakers that transform an electrical signal into acoustic energy (sound) - remote control
Actuators The other side of the coin from sensors... Enable a microprocessor to modify the analog world. Examples: - speakers that transform an electrical signal into acoustic energy (sound) - remote control
School of Engineering Mechatronics Engineering Department. Experim. ment no. 1
 University of Jordan School of Engineering Mechatronics Engineering Department 2010 Mechatronics System Design Lab Experim ment no. 1 PRINCIPLES OF SWITCHING Copyrights' are held by : Eng. Ala' Bata &
University of Jordan School of Engineering Mechatronics Engineering Department 2010 Mechatronics System Design Lab Experim ment no. 1 PRINCIPLES OF SWITCHING Copyrights' are held by : Eng. Ala' Bata &
Exercise 6. Open-Loop Speed Control EXERCISE OBJECTIVE
 Exercise 6 Open-Loop Speed Control EXERCISE OBJECTIVE To understand what is open-loop speed control; To learn how to sense the speed of the trainer Bidirectional Motor; To control the speed of the trainer
Exercise 6 Open-Loop Speed Control EXERCISE OBJECTIVE To understand what is open-loop speed control; To learn how to sense the speed of the trainer Bidirectional Motor; To control the speed of the trainer
Input/Output Control Using Interrupt Service Routines to Establish a Time base
 CSUS EEE174 Lab Input/Output Control Using Interrupt Service Routines to Establish a Time base 599 Menlo Drive, Suite 100 Rocklin, California 95765, USA Office/Tech Support: (916) 624-8333 Fax: (916) 624-8003
CSUS EEE174 Lab Input/Output Control Using Interrupt Service Routines to Establish a Time base 599 Menlo Drive, Suite 100 Rocklin, California 95765, USA Office/Tech Support: (916) 624-8333 Fax: (916) 624-8003
MODEL G0501 SLIDING TABLE SAW
 MODEL G0501 SLIDING TABLE SAW MANUAL UPDATE The Sliding Table Saw has changed slightly from when the manual was originally written. We have improved the crosscut fence, extension tables, blade guard assembly,
MODEL G0501 SLIDING TABLE SAW MANUAL UPDATE The Sliding Table Saw has changed slightly from when the manual was originally written. We have improved the crosscut fence, extension tables, blade guard assembly,
L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G
 P R O F. S L A C K L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G G B S E E E @ R I T. E D U B L D I N G 9, O F F I C E 0 9-3 1 8 9 ( 5 8 5 ) 4 7 5-5 1 0
P R O F. S L A C K L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G G B S E E E @ R I T. E D U B L D I N G 9, O F F I C E 0 9-3 1 8 9 ( 5 8 5 ) 4 7 5-5 1 0
Blue Point Engineering
 Blue Point Engineering Instruction I www.bpesolutions.com Pointing the Way to Solutions! Animatronic Wizard - 3 Board (BPE No. WAC-0030) Version 3.0 2009 Controller Page 1 The Wizard 3 Board will record
Blue Point Engineering Instruction I www.bpesolutions.com Pointing the Way to Solutions! Animatronic Wizard - 3 Board (BPE No. WAC-0030) Version 3.0 2009 Controller Page 1 The Wizard 3 Board will record
Mech 296: Vision for Robotic Applications. Logistics
 Mech 296: Vision for Robotic Applications http://www.acroname.com/ Lecture 6: Embedded Vision and Control 6.1 Logistics Homework #3 / Lab #1 return Homework #4 questions Lab #2 discussion Final Project
Mech 296: Vision for Robotic Applications http://www.acroname.com/ Lecture 6: Embedded Vision and Control 6.1 Logistics Homework #3 / Lab #1 return Homework #4 questions Lab #2 discussion Final Project
Laboratory Exercise 1 Microcontroller Board with Driver Board
 Laboratory Exercise 1 Microcontroller Board with Driver Board The purpose of this lab exercises is to demonstrate how the Microcontroller Board can be used to control motors connected to the Driver Board
Laboratory Exercise 1 Microcontroller Board with Driver Board The purpose of this lab exercises is to demonstrate how the Microcontroller Board can be used to control motors connected to the Driver Board
Assignments from last week
 Assignments from last week Review LED flasher kits Review protoshields Need more soldering practice (see below)? http://www.allelectronics.com/make-a-store/category/305/kits/1.html http://www.mpja.com/departments.asp?dept=61
Assignments from last week Review LED flasher kits Review protoshields Need more soldering practice (see below)? http://www.allelectronics.com/make-a-store/category/305/kits/1.html http://www.mpja.com/departments.asp?dept=61
PAK-Vb/c PWM Coprocessor Data Sheet by AWC
 PAK-Vb/c PWM Coprocessor Data Sheet 1998-2003 by AWC AWC 310 Ivy Glen League City, TX 77573 (281) 334-4341 http://www.al-williams.com/awce.htm V1.8 23 Oct 2003 Table of Contents Overview...1 If You Need
PAK-Vb/c PWM Coprocessor Data Sheet 1998-2003 by AWC AWC 310 Ivy Glen League City, TX 77573 (281) 334-4341 http://www.al-williams.com/awce.htm V1.8 23 Oct 2003 Table of Contents Overview...1 If You Need
Power systems Protection course
 Al-Balqa Applied University Power systems Protection course Department of Electrical Energy Engineering 1 Part 5 Relays 2 3 Relay Is a device which receive a signal from the power system thought CT and
Al-Balqa Applied University Power systems Protection course Department of Electrical Energy Engineering 1 Part 5 Relays 2 3 Relay Is a device which receive a signal from the power system thought CT and
E l e c t r i c A c t u a t o r s
 Electric Actuators A103/02 S U M M A R Y BERNARD classification 3 Terminology 4 Motor duty service 5 2 Positioning loops 6 Regulation modes 7 3 classes of actuators 8 Electronic positioner general functions
Electric Actuators A103/02 S U M M A R Y BERNARD classification 3 Terminology 4 Motor duty service 5 2 Positioning loops 6 Regulation modes 7 3 classes of actuators 8 Electronic positioner general functions
Modern Robotics Inc. Sensor Documentation
 Modern Robotics Inc. Sensor Documentation Version 1.4.3 December 11, 2017 Contents 1. Document Control... 3 2. Introduction... 4 3. Three-Wire Analog & Digital Sensors... 5 3.1. Program Control Button
Modern Robotics Inc. Sensor Documentation Version 1.4.3 December 11, 2017 Contents 1. Document Control... 3 2. Introduction... 4 3. Three-Wire Analog & Digital Sensors... 5 3.1. Program Control Button
PIC Functionality. General I/O Dedicated Interrupt Change State Interrupt Input Capture Output Compare PWM ADC RS232
 PIC Functionality General I/O Dedicated Interrupt Change State Interrupt Input Capture Output Compare PWM ADC RS232 General I/O Logic Output light LEDs Trigger solenoids Transfer data Logic Input Monitor
PIC Functionality General I/O Dedicated Interrupt Change State Interrupt Input Capture Output Compare PWM ADC RS232 General I/O Logic Output light LEDs Trigger solenoids Transfer data Logic Input Monitor
Laboratory 11. Pulse-Width-Modulation Motor Speed Control with a PIC
 Laboratory 11 Pulse-Width-Modulation Motor Speed Control with a PIC Required Components: 1 PIC16F88 18P-DIP microcontroller 3 0.1 F capacitors 1 12-button numeric keypad 1 NO pushbutton switch 1 Radio
Laboratory 11 Pulse-Width-Modulation Motor Speed Control with a PIC Required Components: 1 PIC16F88 18P-DIP microcontroller 3 0.1 F capacitors 1 12-button numeric keypad 1 NO pushbutton switch 1 Radio
Laboratory Seven Stepper Motor and Feedback Control
 EE3940 Microprocessor Systems Laboratory Prof. Andrew Campbell Spring 2003 Groups Names Laboratory Seven Stepper Motor and Feedback Control In this experiment you will experiment with a stepper motor and
EE3940 Microprocessor Systems Laboratory Prof. Andrew Campbell Spring 2003 Groups Names Laboratory Seven Stepper Motor and Feedback Control In this experiment you will experiment with a stepper motor and
Rhino Packing Gland Tool
 Instruction Sheet P/N Rhino Packing Gland Tool 1. Description See Figure 1. The Rhino packing gland tool is used to remove the packing gland from Rhino bulk unloader pumps. The tool consists of two components,
Instruction Sheet P/N Rhino Packing Gland Tool 1. Description See Figure 1. The Rhino packing gland tool is used to remove the packing gland from Rhino bulk unloader pumps. The tool consists of two components,
MICROCONTROLLERS Stepper motor control with Sequential Logic Circuits
 PH-315 MICROCONTROLLERS Stepper motor control with Sequential Logic Circuits Portland State University Summary Four sequential digital waveforms are used to control a stepper motor. The main objective
PH-315 MICROCONTROLLERS Stepper motor control with Sequential Logic Circuits Portland State University Summary Four sequential digital waveforms are used to control a stepper motor. The main objective
Attribution Thank you to Arduino and SparkFun for open source access to reference materials.
 Attribution Thank you to Arduino and SparkFun for open source access to reference materials. Contents Parts Reference... 1 Installing Arduino... 7 Unit 1: LEDs, Resistors, & Buttons... 7 1.1 Blink (Hello
Attribution Thank you to Arduino and SparkFun for open source access to reference materials. Contents Parts Reference... 1 Installing Arduino... 7 Unit 1: LEDs, Resistors, & Buttons... 7 1.1 Blink (Hello
FIRST Robotics Control System
 2018/2019 FIRST Robotics Control System Team 236 1 (click on a component to go to its slide) 2 The Robot Powered solely by 12V battery RoboRIO- is the computer on the robot Controlled by Java code on the
2018/2019 FIRST Robotics Control System Team 236 1 (click on a component to go to its slide) 2 The Robot Powered solely by 12V battery RoboRIO- is the computer on the robot Controlled by Java code on the
Matrix Multimedia PICmicro microcontroller development board Information datasheet: Using external sensors and actuators
 Contents of this document 1. Introduction 2. Sensor information 3. Actuator information 4. Using the worksheets 5. Using macros 6. Heart rate sensor worksheet 7. Temperature probe worksheet 8. Photogate
Contents of this document 1. Introduction 2. Sensor information 3. Actuator information 4. Using the worksheets 5. Using macros 6. Heart rate sensor worksheet 7. Temperature probe worksheet 8. Photogate
Figure 1. CheapBot Line Follower
 The CheapBot Line Follower v2.0 is a plug-in single-board sensor for almost any programmable robot brain. With it, a robot can detect the presence of a black or white zone beneath its two sensors. In its
The CheapBot Line Follower v2.0 is a plug-in single-board sensor for almost any programmable robot brain. With it, a robot can detect the presence of a black or white zone beneath its two sensors. In its
Report and Documentation. Date Submitted: ME3483 Mechatronics
 Report and Documentation Date Submitted: 12-19-06 ME3483 Mechatronics Group Members Ariel Avezbadalov Roy Pastor Samir Mohammed Travis Francis Emails (arielavezbadalov@yahoo.com) (rpasto02@gmail.com) (Samirsmohammed@yahoo.com)
Report and Documentation Date Submitted: 12-19-06 ME3483 Mechatronics Group Members Ariel Avezbadalov Roy Pastor Samir Mohammed Travis Francis Emails (arielavezbadalov@yahoo.com) (rpasto02@gmail.com) (Samirsmohammed@yahoo.com)
Chapter 3: Assemble and Test Your Boe-Bot
 Chapter 3: Assemble and Test Your Boe-Bot Page 91 Chapter 3: Assemble and Test Your Boe-Bot This chapter contains instructions for building and testing your Boe-Bot. It s especially important to complete
Chapter 3: Assemble and Test Your Boe-Bot Page 91 Chapter 3: Assemble and Test Your Boe-Bot This chapter contains instructions for building and testing your Boe-Bot. It s especially important to complete
HAW-Arduino. Sensors and Arduino F. Schubert HAW - Arduino 1
 HAW-Arduino Sensors and Arduino 14.10.2010 F. Schubert HAW - Arduino 1 Content of the USB-Stick PDF-File of this script Arduino-software Source-codes Helpful links 14.10.2010 HAW - Arduino 2 Report for
HAW-Arduino Sensors and Arduino 14.10.2010 F. Schubert HAW - Arduino 1 Content of the USB-Stick PDF-File of this script Arduino-software Source-codes Helpful links 14.10.2010 HAW - Arduino 2 Report for
'{$STAMP BS2} '{$PBASIC 2.5}
 '{$STAMP BS2} '{$PBASIC 2.5} 'Satellite tracking interface for use between the 'NOVA satellite tracking software package and the 'Yaseu G-5500 azmeth/elevation rotor system. The 'circuit design and this
'{$STAMP BS2} '{$PBASIC 2.5} 'Satellite tracking interface for use between the 'NOVA satellite tracking software package and the 'Yaseu G-5500 azmeth/elevation rotor system. The 'circuit design and this
MAE106 Laboratory Exercises Lab # 1 - Laboratory tools
 MAE106 Laboratory Exercises Lab # 1 - Laboratory tools University of California, Irvine Department of Mechanical and Aerospace Engineering Goals To learn how to use the oscilloscope, function generator,
MAE106 Laboratory Exercises Lab # 1 - Laboratory tools University of California, Irvine Department of Mechanical and Aerospace Engineering Goals To learn how to use the oscilloscope, function generator,
THE UNIVERSITY OF BRITISH COLUMBIA. Department of Electrical and Computer Engineering. EECE 365: Applied Electronics and Electromechanics
 THE UNIVERSITY OF BRITISH COLUMBIA Department of Electrical and Computer Engineering EECE 365: Applied Electronics and Electromechanics Final Exam / Sample-Practice Exam Spring 2008 April 23 Topics Covered:
THE UNIVERSITY OF BRITISH COLUMBIA Department of Electrical and Computer Engineering EECE 365: Applied Electronics and Electromechanics Final Exam / Sample-Practice Exam Spring 2008 April 23 Topics Covered:
Feed-back loop. open-loop. closed-loop
 Servos AJLONTECH Overview Servo motors are used for angular positioning, such as in radio control airplanes. They typically have a movement range of 180 deg but can go up to 210 deg. The output shaft of
Servos AJLONTECH Overview Servo motors are used for angular positioning, such as in radio control airplanes. They typically have a movement range of 180 deg but can go up to 210 deg. The output shaft of
Experiment#6: Speaker Control
 Experiment#6: Speaker Control I. Objectives 1. Describe the operation of the driving circuit for SP1 speaker. II. Circuit Description The circuit of speaker and driver is shown in figure# 1 below. The
Experiment#6: Speaker Control I. Objectives 1. Describe the operation of the driving circuit for SP1 speaker. II. Circuit Description The circuit of speaker and driver is shown in figure# 1 below. The
BFS / BFSM SERIES Installation & Maintenance Manual
 Introduction: The BFS / BFSM series electric actuators have battery backup modules for fail safe operation. The BFS series is for two position control and the BFSM series is for proportional control, both
Introduction: The BFS / BFSM series electric actuators have battery backup modules for fail safe operation. The BFS series is for two position control and the BFSM series is for proportional control, both
Embedded systems. Exercise session 1. Introduction and project presentation
 Embedded systems Exercise session 1 Introduction and project presentation Introduction Contact Mail : michael.fonder@ulg.ac.be Office : 1.82a, Montefiore Website for the exercise sessions and the project
Embedded systems Exercise session 1 Introduction and project presentation Introduction Contact Mail : michael.fonder@ulg.ac.be Office : 1.82a, Montefiore Website for the exercise sessions and the project
Digital Interface Card DEC005000
 Engineering & Manufacturing Solutions Digital Interface Card DEC005000 APPLICATION: The DEC005000 conveniently interfaces industry standard signals 4-20mA, 0-5V or 0-10V with a proportional solenoid valve
Engineering & Manufacturing Solutions Digital Interface Card DEC005000 APPLICATION: The DEC005000 conveniently interfaces industry standard signals 4-20mA, 0-5V or 0-10V with a proportional solenoid valve
DECEMBER 2014 Level 2 Certificate/Diploma in Engineering (IVQ) Principles of electrical and electronics technology
 Principles of electrical and electronics technology") *28502561214* 2850-256 DECEMBER 2014 Level 2 Certificate/Diploma in Engineering (IVQ) Principles of electrical and electronics technology Tuesday 11 December 2014 09:30 11:30 You should have the following
*28502561214* 2850-256 DECEMBER 2014 Level 2 Certificate/Diploma in Engineering (IVQ) Principles of electrical and electronics technology Tuesday 11 December 2014 09:30 11:30 You should have the following
MAKING MODERN LIVING POSSIBLE. Electrical Installation. M46 Pumps HC EDC. powersolutions.danfoss.com
 MAKING MODERN LIVING POSSIBLE Electrical Installation M46 Pumps HC EDC powersolutions.danfoss.com Revision history Table of revisions Date Changed Rev September 2015 Minor layout revision AB June 2014
MAKING MODERN LIVING POSSIBLE Electrical Installation M46 Pumps HC EDC powersolutions.danfoss.com Revision history Table of revisions Date Changed Rev September 2015 Minor layout revision AB June 2014
Tektronix AFG10022 Function Generator. Coming soon to B10: Sin, Square, Ramp, Swept, Arbitrary, Noise. Linear Actuators. Non-magnetized iron plunger
 4/19/18 Tektronix AFG10022 Function Generator Coming soon to B10: Sin, Square, Ramp, Swept, Arbitrary, Noise 508 Linear Actuators Solenoids (stationary coil) Non-magnetized iron plunger Iron always pulled
4/19/18 Tektronix AFG10022 Function Generator Coming soon to B10: Sin, Square, Ramp, Swept, Arbitrary, Noise 508 Linear Actuators Solenoids (stationary coil) Non-magnetized iron plunger Iron always pulled