Intelligent Transport Systems and GNSS. ITSNT 2017 ENAC, Toulouse, France 11/ Nobuaki Kubo (TUMSAT)
|
|
|
- Maximillian Lambert
- 6 years ago
- Views:
Transcription



1 Intelligent Transport Systems and GNSS ITSNT 2017 ENAC, Toulouse, France 11/ Nobuaki Kubo (TUMSAT)
2 Contents ITS applications in Japan How can GNSS contribute to ITS? Current performance of GNSS with other sensors - Test results in the different environments. - Low-cost commercial products are only used

 Very Good : Company M 99/110, Company V 95/110, Company S 89/110 Good : Company")
3 ACC (Adaptive Cruise Control) and Lane Keep Assist Very recently, one of the newspaper company tested the 6 cars in Lane keep assist. Express highway, difficult situation (heavy rain, backlight and lane is difficult to see) Very Good : Company M 99/110, Company V 95/110, Company S 89/110 Good : Company B 77/110 Not Good : 5 th 54, 6 th 18
 Tsukuba Handle operation only!")

4 50 km highway driving (Tokyo-Tsukuba) using only ACC (no accelerator/brake) Tsukuba Handle operation only! Tokyo Even in this crowded intersecting, I realized smooth lane change. During the heavy traffic, ACC was perfect.

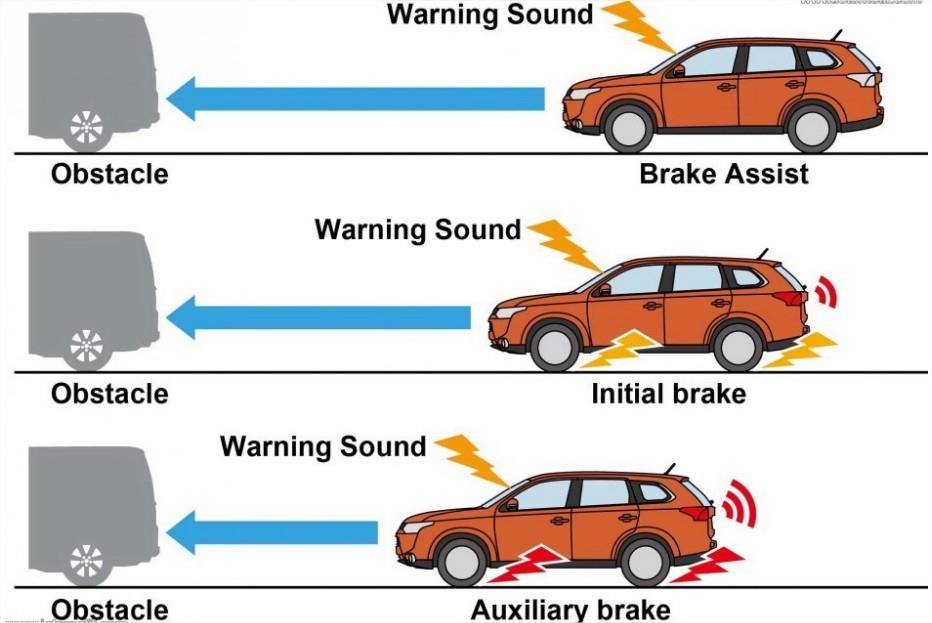
5 Pre-Collision Braking System


6 V2X (Vehicle to N/V/I/P) V2X 1. Vehicle-to-cellular-Network 2. Vehicle-to-Vehicle 3. Vehicle-to-roadside-Infrastructure 4. Vehicle-to-Pedestrian






7 Advantages and Disadvantages Dead-reckoning GNSS Scan-matching IMU, Speed etc. GNSS receiver LIDAR etc. Advantages Can be used anywhere Can be used without map, Initial position, velocity and timing Disadvantages Error is accumulated Accuracy depends on the environment Instead of human eyes and accurate Precise 3D map and feature points are required Tunnel
8 How about GNSS? These services I introduce do not use GNSS. It might be used in V2X because position and velocity etc. of each car are very important. GNSS is used for precise 3D map generation map generation by self-vehicle shooting Location based charging system Recently, we are frequently asked by several manufactures regarding lane-recognition. It does not require cm-level but decimeter level. Maybe, decimeter level absolute position is the key to get GNSS used more in the field of ITS.



9 Different environments for GNSS Countryside 1. Cm-level 2. Low-cost Urban 1. Decimeter-level 2. Low-cost 3. Multi-sensors Tunnel and indoor 1. Impossible It is important to switch algorithm smoothly depending on the condition

10 Emerging correction service of GNSS One thing we need to consider... The performance of these global correction services is different from local correction service such as DGNSS and RTK. Generally, local-rtk is the best Performance in terms of accuracy, availability and reliability. We tend to discuss the best performance Investment from 5 companies : 1. Hitachi Zosen Corporation 2. Development Bank of Japan Inc. 3. DENSO Corporation 4. Hitachi Automotive Systems, Ltd. 5. Japan Radio Co., Ltd. MADOCA Multi-GNSS Advanced Demonstration tool for Orbit and Clock Analysis being developed by JAXA based on their technology for estimating satellite orbit and clock corrections
11 Current performance of GNSS with other sensors
12 Current situation (low-cost vs. survey grade) Decimeter-level accuracy is expected. It s time to use correction data even with consumer GNSS receiver. Multi-GNSS improves accuracy and availability. Performance improvement of low-cost receiver is remarkable. Target : maximum horizontal error is < 1.0 m (100 %) except for tunnel. >10m 5m 1m 10cm 1cm Target Accuracy #2 Product ($10-100) #1 Product ($10, ,000) 12
13 Test Results Low-cost receiver in normal urban areas Low-cost receiver with sensors in dense urban areas Low-cost receiver with sensors in metropolitan expressway Motivation 1. Where is the limitation of GNSS? 2. What is the key technique to improve the performance? Prerequisite 1. Base station is within about km for all tests 2. GNSS Receiver is u-blox M8T 3. IMU/Speed sensors are car navigation grade



14 1. Test Results of GNSS receiver in normal urban areas (2015)
 20 minutes with 5Hz (3 times for same route) Reference positions : POSLV Normal urban areas except for several high-rise buildings Speed Slow or zero Normal Integration using")
15 Normal Urban Areas Test (only GNSS) GNSS Observations DGNSS Position Doppler frequency derived velocity Test route Test configuration Tokyo, August 2015 Single frequency GNSS receiver (u-blox M8T) GPS/BEI/QZS (DGNSS) 20 minutes with 5Hz (3 times for same route) Reference positions : POSLV Normal urban areas except for several high-rise buildings Speed Slow or zero Normal Integration using Kalman filter Weighting Position <<< Velocity Position < Velocity Integrated navigation solution Position 15
16 Pseudo-range based position w/o C/N 0 check Without C/N 0 consideration With C/N 0 consideration We need to reduce the large jumps probably due to NLOS satellite as much as possible before coupling. C/N 0 based satellite selection is effective to some degree.
17 KF Loosely-coupling pseudo-range based position with velocity (derived from Doppler frequency) We tend to receive the strong multipath during the stopping in urban areas No speed consideration Speed consideration The normal weighting for positioning / velocity is 2m/0.025m/s. Speed consideration means we heavily rely on velocity when the car speed is very slow or zero. It means the weighting for positioning / velocity is 100m/0.025m/s.
18 Horizontal Errors and Cumulative Percentage No differential correction for NMEA Maximum error % less than 1.5 m Proposed method 1.86 m 99.5 % Receiver s NMEA 5.31 m 0 % (No differential correction) Results of other 2 tests were almost same. 18
 Horizontal distribution of this experiment (More than 10 satellites) Route image 1.")

19 New Test Results in Similar Course (u-blox M8T) +RTK-GNSS (GPS/QZS/BeiDou/Galileo) in 2016 Every system combination of this experiment (Non-consideration) Horizontal distribution of this experiment (More than 10 satellites) Route image 1.5km Under elevated road, bridge and high-rise building Minimum number of used satellites RTK FIX Rate 73.9% 71.6% 68.3% 61.4% 52.3% Within 30cm in horizontal 97.35% 99.27% 99.57% 99.40% 99.86% Single-frequency RTK performance depends on the number of used satellites 19

20 Coupling past work with RTK-GNSS Past work GNSS Observables + RTK-GNSS FLOAT solution FIX AR FIX solution Position DGNSS Position integration Kalman filter Doppler frequency derived velocity DGNSS positions are replaced with RTK-GNSS positions when we have valid RTK solution Target Maximum horizontal error < 1.0 m Integrated navigation solution Position 20




21 Result [Horizontal error in time sequence] Through the truss bridge stop at a red light Sky image Blue Horizontal error[m] 21
22 Result [Cumulative distribution] Blue Previous method red +RTK-GNSS Max horizontal error % less than 1.0 m Previous method 1.80 m 92.8 % +RTK-GNSS 0.97 m 100 % 22



23 2. Test Results of GNSS receiver with sensors in dense urban areas (2016)
24 Overall of our Integration Method (GNSS/IMU/Speed) Accelerometer Vehicle sensor Gyroscope Speed Yaw rate Movement Decision GNSS Velocity Heading Heading filter Velocity filter DGNSS Absolute position Position filter RTK-GNSS Wrong fix Decision Navigation In fact, it is very difficult to obtain the reliable fixed solutions in dense urban areas Near future low-cost dual-frequency GNSS receiver helps a lot!
 σ 2 z6 = z 6 x 2 2 6 σ x6")
25 Meas.(!) σ 2 z6 = z 6 x σ x6 Innovation Predict 25
26 How is the accuracy of the direction improved? Raw IMU direction error After considering the zero angular rate update After integration with GNSS velocity vector IMU direction and GNSS velocity direction are checked each other. Outlier detection of GNSS velocity is very important. Speed sensor output is also used to check the Jumps of GNSS velocity. Ave : almost 0 Std : 0.25 degrees 26
27 Pseudo-range based position with C/N 0 check Business district near Tokyo station Many high-rise buildings 1. Over 100 m errors can be easily seen. 2. Strict C/N 0 check is already performed. 3. Positioning rate of GNSS was about 76 % 4. Maximum interval with no GNSS was 68 s. 27
28 Final coupling horizontal results using GNSS/IMU/Speed Temporal horizontal errors (E and N) Maximum horizontal error was 2.9 m When we used dual-frequency multi-gnss receiver, the performance was improved a lot because we will have % reliable RTK Fixed solutions. Horizontal Errors and Cumulative Percentage 28

")

29 3. Test Results of GNSS receiver with sensors in urban expressway (2017) seconds outages are included in the case of using IMU/Speed
30 Test Configuration sec Interval of non-gnss solutions Test route in the center of Tokyo We evaluated the period without long GNSS outages. Low-cost GNSS receiver (u-blox M8T), IMU and speed sensor were used. Base station was within 10 km. Reference precise positions was deduced from POSLV.
31 Only RTK Results About 27% FIX Rate Horizontal Errors and Cumulative Percentage
32 Test results of 4 different scenarios Without second outages Percentile 90% 95% 99% Code 1.78m 2.38m 6.02m Code+DP 1.03m 1.40m 2.62m Code+DP+IMU+Speed 0.78m 0.98m 1.16m Code+DP+IMU+Speed+RTK 0.40m 0.58m 1.13m Horizontal Errors and Cumulative Percentage DP : Doppler frequency based velocity is used.
33 Summary Initial or absolute positions are still very important for future ITS applications. We might need to discuss about wide area precise correction service (we tend to show the test results in local area correction service). In normal urban areas, horizontal errors can be mitigated within 1 m. In dense urban areas, horizontal errors can be mitigated within 3 m (near future, 1-2 m possible). Appropriate protection level can be estimated using GNSS/IMU/Speed sensors. It is difficult to estimate using only GNSS.

34 PRN194 PRN193 PRN199 PRN195
35 Thank you very much!


36 4. Protection level estimation for GNSS in urban areas (2015) Determines the confidence limits of position errors. It is called protection level. HPL : Horizontal Protection Level compares the protection level with the alert limit if the system is usable or not. HPL<HAL Available HPL HAL HPL>HAL Not available GNSS Sensors RTK Doppler DGNSS Speed IMU Position Velocity Direction It is very difficult to define the confidence limits using only GNSS because it has sharp increase errors. We will see more practical protection level integrating GNSS with other sensors.


37 POSLV RTK Doppler IMU Actual estimated protection level in dense urban area (GNSS/IMU/Speed)
38 Reliability and horizontal errors (m) Protection Level and Real Horizontal Errors Temporal horizontal errors Protection level Horizontal errors TOW (s)
39 Stanford chart (99.9%) Number of Points
and Vehicle Sensors in Urban Environment
 AvailabilityImprovement ofrtk GPS GPSwithIMU and Vehicle Sensors in Urban Environment ION GPS/GNSS 2012 Tk Tokyo University it of Marine Si Science and Technology Nobuaki Kubo, Chen Dihan 1 Contents Background
AvailabilityImprovement ofrtk GPS GPSwithIMU and Vehicle Sensors in Urban Environment ION GPS/GNSS 2012 Tk Tokyo University it of Marine Si Science and Technology Nobuaki Kubo, Chen Dihan 1 Contents Background
Reliability Estimation for RTK-GNSS/IMU/Vehicle Speed Sensors in Urban Environment
 Laboratory of Satellite Navigation Engineering Reliability Estimation for RTK-GNSS/IMU/Vehicle Speed Sensors in Urban Environment Ren Kikuchi, Nobuaki Kubo (TUMSAT) Shigeki Kawai, Ichiro Kato, Nobuyuki
Laboratory of Satellite Navigation Engineering Reliability Estimation for RTK-GNSS/IMU/Vehicle Speed Sensors in Urban Environment Ren Kikuchi, Nobuaki Kubo (TUMSAT) Shigeki Kawai, Ichiro Kato, Nobuyuki
Trustworthy Positioning for Next Generation Intelligent Transport Systems Ahmed El-Mowafy
 Trustworthy Positioning for Next Generation Intelligent Transport Systems Ahmed El-Mowafy Contents Background on ITS and C-ITS Requirements Challenges RAIM Test and Results Utilisation Workshop, Sydney,
Trustworthy Positioning for Next Generation Intelligent Transport Systems Ahmed El-Mowafy Contents Background on ITS and C-ITS Requirements Challenges RAIM Test and Results Utilisation Workshop, Sydney,
Performance Evaluation of the Effect of QZS (Quasi-zenith Satellite) on Precise Positioning
 on Precise Positioning") Performance Evaluation of the Effect of QZS (Quasi-zenith Satellite) on Precise Positioning Nobuaki Kubo, Tomoko Shirai, Tomoji Takasu, Akio Yasuda (TUMST) Satoshi Kogure (JAXA) Abstract The quasi-zenith
Performance Evaluation of the Effect of QZS (Quasi-zenith Satellite) on Precise Positioning Nobuaki Kubo, Tomoko Shirai, Tomoji Takasu, Akio Yasuda (TUMST) Satoshi Kogure (JAXA) Abstract The quasi-zenith
ADVANCED GNSS ALGORITHMS FOR SAFE AUTONOMOUS VEHICLES
 ION GNSS+ 2017 ADVANCED GNSS ALGORITHMS FOR SAFE AUTONOMOUS VEHICLES SEPTEMBER 29 TH, 2017 ION GNSS+ 2017, PORTLAND, OREGON, USA SESSION A5: Autonomous and Assisted Vehicle Applications Property of GMV
ION GNSS+ 2017 ADVANCED GNSS ALGORITHMS FOR SAFE AUTONOMOUS VEHICLES SEPTEMBER 29 TH, 2017 ION GNSS+ 2017, PORTLAND, OREGON, USA SESSION A5: Autonomous and Assisted Vehicle Applications Property of GMV
Performance Evaluation of Multi-GNSS RTK for Automobiles in Urban Areas
 Performance Evaluation of Multi-GNSS RTK for Automobiles in Urban Areas ISGNSS2014 21-24 October, 2014, ICC Jeju, Korea Nobuaki Kubo, Hiroko Tokura, Taro Suzuki (TUMSAT) 1 Contents Current Status of Multi-GNSS
Performance Evaluation of Multi-GNSS RTK for Automobiles in Urban Areas ISGNSS2014 21-24 October, 2014, ICC Jeju, Korea Nobuaki Kubo, Hiroko Tokura, Taro Suzuki (TUMSAT) 1 Contents Current Status of Multi-GNSS
High Precision GNSS in Automotive
 High Precision GNSS in Automotive Jonathan Auld, VP Engineering and Safety 6, March, 2018 2 Global OEM Positioning Solutions and Services for Land, Sea, and Air. GNSS in Automotive Today Today the primary
High Precision GNSS in Automotive Jonathan Auld, VP Engineering and Safety 6, March, 2018 2 Global OEM Positioning Solutions and Services for Land, Sea, and Air. GNSS in Automotive Today Today the primary
Positioning Challenges in Cooperative Vehicular Safety Systems
 Positioning Challenges in Cooperative Vehicular Safety Systems Dr. Luca Delgrossi Mercedes-Benz Research & Development North America, Inc. October 15, 2009 Positioning for Automotive Navigation Personal
Positioning Challenges in Cooperative Vehicular Safety Systems Dr. Luca Delgrossi Mercedes-Benz Research & Development North America, Inc. October 15, 2009 Positioning for Automotive Navigation Personal
Webinar. 9 things you should know about centimeter-level GNSS accuracy
 Webinar 9 things you should know about centimeter-level GNSS accuracy Webinar agenda 9 things you should know about centimeter-level GNSS accuracy 1. High precision GNSS challenges 2. u-blox F9 technology
Webinar 9 things you should know about centimeter-level GNSS accuracy Webinar agenda 9 things you should know about centimeter-level GNSS accuracy 1. High precision GNSS challenges 2. u-blox F9 technology
V2X-Locate Positioning System Whitepaper
 V2X-Locate Positioning System Whitepaper November 8, 2017 www.cohdawireless.com 1 Introduction The most important piece of information any autonomous system must know is its position in the world. This
V2X-Locate Positioning System Whitepaper November 8, 2017 www.cohdawireless.com 1 Introduction The most important piece of information any autonomous system must know is its position in the world. This
The Possibility of Precise Automobile Navigation using GPS/QZS L5 and (Galileo E5) Pseudo ranges
 Pseudo ranges") The Possibility of Precise Automobile Navigation using GPS/QZS L5 and (Galileo E5 Pseudo ranges ION ITM ITM 013 Hiroko Tokura, Taro Suzuki, Tomoji Takasu, Nobuaki Kubo (Tokyo University of Marine Scienceand
The Possibility of Precise Automobile Navigation using GPS/QZS L5 and (Galileo E5 Pseudo ranges ION ITM ITM 013 Hiroko Tokura, Taro Suzuki, Tomoji Takasu, Nobuaki Kubo (Tokyo University of Marine Scienceand
ION ITM Tokyo University of Marine Science and Technology H. Sridhara, N. Kubo, R.Kikuchi
 Single-Frequency Multi-GNSS RTK Positioning for Moving Platform ION ITM 215 215.1.27-29 Tokyo University of Marine Science and Technology H. Sridhara, N. Kubo, R.Kikuchi 1 Agenda Motivation and Background
Single-Frequency Multi-GNSS RTK Positioning for Moving Platform ION ITM 215 215.1.27-29 Tokyo University of Marine Science and Technology H. Sridhara, N. Kubo, R.Kikuchi 1 Agenda Motivation and Background
Robust Positioning for Urban Traffic
 Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
The Benefits of Three Frequencies for the High Accuracy Positioning
 The Benefits of Three Frequencies for the High Accuracy Positioning Nobuaki Kubo (Tokyo University of Marine and Science Technology) Akio Yasuda (Tokyo University of Marine and Science Technology) Isao
The Benefits of Three Frequencies for the High Accuracy Positioning Nobuaki Kubo (Tokyo University of Marine and Science Technology) Akio Yasuda (Tokyo University of Marine and Science Technology) Isao
1 General Information... 2
 Release Note Topic : u-blox M8 Flash Firmware 3.01 UDR 1.00 UBX-16009439 Author : ahaz, yste, amil Date : 01 June 2016 We reserve all rights in this document and in the information contained therein. Reproduction,
Release Note Topic : u-blox M8 Flash Firmware 3.01 UDR 1.00 UBX-16009439 Author : ahaz, yste, amil Date : 01 June 2016 We reserve all rights in this document and in the information contained therein. Reproduction,
Prospect for Global Positioning Augmentation Service by QZSS
 Prospect for Global Positioning Augmentation Service by QZSS Global Positioning Augmentation Service Corporation Director, Yoshikatsu Iotake Feb. 6, 2018 Copyright 2018 Global Positioning Augmentation
Prospect for Global Positioning Augmentation Service by QZSS Global Positioning Augmentation Service Corporation Director, Yoshikatsu Iotake Feb. 6, 2018 Copyright 2018 Global Positioning Augmentation
A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology
 A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology Tatyana Bourke, Applanix Corporation Abstract This paper describes a post-processing software package that
A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology Tatyana Bourke, Applanix Corporation Abstract This paper describes a post-processing software package that
NovAtel s. Performance Analysis October Abstract. SPAN on OEM6. SPAN on OEM6. Enhancements
 NovAtel s SPAN on OEM6 Performance Analysis October 2012 Abstract SPAN, NovAtel s GNSS/INS solution, is now available on the OEM6 receiver platform. In addition to rapid GNSS signal reacquisition performance,
NovAtel s SPAN on OEM6 Performance Analysis October 2012 Abstract SPAN, NovAtel s GNSS/INS solution, is now available on the OEM6 receiver platform. In addition to rapid GNSS signal reacquisition performance,
Inertially Aided RTK Performance Evaluation
 Inertially Aided RTK Performance Evaluation Bruno M. Scherzinger, Applanix Corporation, Richmond Hill, Ontario, Canada BIOGRAPHY Dr. Bruno M. Scherzinger obtained the B.Eng. degree from McGill University
Inertially Aided RTK Performance Evaluation Bruno M. Scherzinger, Applanix Corporation, Richmond Hill, Ontario, Canada BIOGRAPHY Dr. Bruno M. Scherzinger obtained the B.Eng. degree from McGill University
MGA Webinar Series : 1 Very Cheap RTK Receivers: Changing the Landscape of Positioning Services
 MGA Webinar Series : 1 Very Cheap RTK Receivers: Changing the Landscape of Positioning Services Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp
MGA Webinar Series : 1 Very Cheap RTK Receivers: Changing the Landscape of Positioning Services Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp
GPS-Aided INS Datasheet Rev. 3.0
 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
Inertial Systems. Ekinox Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX SERIES R&D specialists usually compromise between high
Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX SERIES R&D specialists usually compromise between high
Sensor Fusion for Navigation in Degraded Environements
 Sensor Fusion for Navigation in Degraded Environements David M. Bevly Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 GPS and Vehicle Dynamics Lab Auburn University
Sensor Fusion for Navigation in Degraded Environements David M. Bevly Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 GPS and Vehicle Dynamics Lab Auburn University
SPAN Technology System Characteristics and Performance
 SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
GPS-Aided INS Datasheet Rev. 2.7
 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
GPS-Aided INS Datasheet Rev. 2.3
 GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
GPS-Aided INS Datasheet Rev. 2.6
 GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
Resilient PNT: From PNT-Unit concept to first realization
 www.dlr.de Chart 1 >Resilient PNT: From PNT Unit concept to first realization> R. Ziebold > e-navigation Underway 1/3/213 Resilient PNT: From PNT-Unit concept to first realization Ralf Ziebold, Z. Dai,
www.dlr.de Chart 1 >Resilient PNT: From PNT Unit concept to first realization> R. Ziebold > e-navigation Underway 1/3/213 Resilient PNT: From PNT-Unit concept to first realization Ralf Ziebold, Z. Dai,
Robust Position and Velocity Estimation Methods in Integrated Navigation Systems for Inland Water Applications
 Robust Position and Velocity Estimation Methods in Integrated Navigation Systems for Inland Water Applications D. Arias-Medina, M. Romanovas, I. Herrera-Pinzón, R. Ziebold German Aerospace Centre (DLR)
Robust Position and Velocity Estimation Methods in Integrated Navigation Systems for Inland Water Applications D. Arias-Medina, M. Romanovas, I. Herrera-Pinzón, R. Ziebold German Aerospace Centre (DLR)
One Source for Positioning Success
 novatel.com One Source for Positioning Success RTK, PPP, SBAS OR DGNSS. NOVATEL CORRECT OPTIMIZES ALL CORRECTION SOURCES, PUTTING MORE POWER, FLEXIBILITY AND CONTROL IN YOUR HANDS. NovAtel CORRECT is the
novatel.com One Source for Positioning Success RTK, PPP, SBAS OR DGNSS. NOVATEL CORRECT OPTIMIZES ALL CORRECTION SOURCES, PUTTING MORE POWER, FLEXIBILITY AND CONTROL IN YOUR HANDS. NovAtel CORRECT is the
Introduction to GNSS Base-Station
 Introduction to GNSS Base-Station Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 Introduction GPS or GNSS observation
Introduction to GNSS Base-Station Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 Introduction GPS or GNSS observation
Continuous High Precision Navigation Using MEMS Inertial Sensors Aided RTK GPS for Mobile Mapping Applications
 Continuous High Precision Navigation Using MEMS Inertial Sensors Aided RTK GPS for Mobile Mapping Applications Yong Li 1, Augustine Tsai 2, Peter Mumford 1, Wei-sen Lin 2, I-chou Hong 2 1 School of Surveying
Continuous High Precision Navigation Using MEMS Inertial Sensors Aided RTK GPS for Mobile Mapping Applications Yong Li 1, Augustine Tsai 2, Peter Mumford 1, Wei-sen Lin 2, I-chou Hong 2 1 School of Surveying
Framework and Performance Evaluation of a Ray Tracing-Software Defined Radio Method for GNSS Positioning in an Urban Canyon Environment
 Framework and Performance Evaluation of a Ray Tracing-Software Defined Radio Method for GNSS Positioning in an Urban Canyon Environment Rei Furukawa, Kozo Keikaku Engineering Inc., Tokyo University of
Framework and Performance Evaluation of a Ray Tracing-Software Defined Radio Method for GNSS Positioning in an Urban Canyon Environment Rei Furukawa, Kozo Keikaku Engineering Inc., Tokyo University of
NovAtel SPAN and Waypoint GNSS + INS Technology
 NovAtel SPAN and Waypoint GNSS + INS Technology SPAN Technology SPAN provides real-time positioning and attitude determination where traditional GNSS receivers have difficulties; in urban canyons or heavily
NovAtel SPAN and Waypoint GNSS + INS Technology SPAN Technology SPAN provides real-time positioning and attitude determination where traditional GNSS receivers have difficulties; in urban canyons or heavily
Steering Angle Sensor; MEMS IMU; GPS; Sensor Integration
 Journal of Intelligent Transportation Systems, 12(4):159 167, 2008 Copyright C Taylor and Francis Group, LLC ISSN: 1547-2450 print / 1547-2442 online DOI: 10.1080/15472450802448138 Integration of Steering
Journal of Intelligent Transportation Systems, 12(4):159 167, 2008 Copyright C Taylor and Francis Group, LLC ISSN: 1547-2450 print / 1547-2442 online DOI: 10.1080/15472450802448138 Integration of Steering
PHINS, An All-In-One Sensor for DP Applications
 DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
GNSS Low-Cost High-Accuracy Receiver (L-CHAR)
") GNSS Low-Cost High-Accuracy Receiver (L-CHAR) Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 High Accuracy Receivers
GNSS Low-Cost High-Accuracy Receiver (L-CHAR) Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 High Accuracy Receivers
Visione per il veicolo Paolo Medici 2017/ Visual Perception
 Visione per il veicolo Paolo Medici 2017/2018 02 Visual Perception Today Sensor Suite for Autonomous Vehicle ADAS Hardware for ADAS Sensor Suite Which sensor do you know? Which sensor suite for Which algorithms
Visione per il veicolo Paolo Medici 2017/2018 02 Visual Perception Today Sensor Suite for Autonomous Vehicle ADAS Hardware for ADAS Sensor Suite Which sensor do you know? Which sensor suite for Which algorithms
VEHICLE INTEGRATED NAVIGATION SYSTEM
 VEHICLE INTEGRATED NAVIGATION SYSTEM Ian Humphery, Fibersense Technology Corporation Christopher Reynolds, Fibersense Technology Corporation Biographies Ian P. Humphrey, Director of GPSI Engineering, Fibersense
VEHICLE INTEGRATED NAVIGATION SYSTEM Ian Humphery, Fibersense Technology Corporation Christopher Reynolds, Fibersense Technology Corporation Biographies Ian P. Humphrey, Director of GPSI Engineering, Fibersense
ADMA. Automotive Dynamic Motion Analyzer with 1000 Hz. ADMA Applications. State of the art: ADMA GPS/Inertial System for vehicle dynamics testing
 ADMA Automotive Dynamic Motion Analyzer with 1000 Hz State of the art: ADMA GPS/Inertial System for vehicle dynamics testing ADMA Applications The strap-down technology ensures that the ADMA is stable
ADMA Automotive Dynamic Motion Analyzer with 1000 Hz State of the art: ADMA GPS/Inertial System for vehicle dynamics testing ADMA Applications The strap-down technology ensures that the ADMA is stable
Precise Positioning with NovAtel CORRECT Including Performance Analysis
 Precise Positioning with NovAtel CORRECT Including Performance Analysis NovAtel White Paper April 2015 Overview This article provides an overview of the challenges and techniques of precise GNSS positioning.
Precise Positioning with NovAtel CORRECT Including Performance Analysis NovAtel White Paper April 2015 Overview This article provides an overview of the challenges and techniques of precise GNSS positioning.
Release Notes. Contents. u-blox M8 UDR 1.21 Firmware for UDR products UBX Martin Wallebohr 27 August 2018
 Release Notes Topic Author Date u-blox M8 UDR 1.21 Firmware for UDR products UBX-18050702 Martin Wallebohr 27 August 2018 Copying, reproduction, modification or disclosure to third parties of this document
Release Notes Topic Author Date u-blox M8 UDR 1.21 Firmware for UDR products UBX-18050702 Martin Wallebohr 27 August 2018 Copying, reproduction, modification or disclosure to third parties of this document
Motion & Navigation Solution
 Navsight Land & Air Solution Motion & Navigation Solution FOR SURVEYING APPLICATIONS Motion, Navigation, and Geo-referencing NAVSIGHT LAND/AIR SOLUTION is a full high performance inertial navigation solution
Navsight Land & Air Solution Motion & Navigation Solution FOR SURVEYING APPLICATIONS Motion, Navigation, and Geo-referencing NAVSIGHT LAND/AIR SOLUTION is a full high performance inertial navigation solution
5G positioning and hybridization with GNSS observations
 5G positioning and hybridization with GNSS observations 1. Introduction Abstract The paradigm of ubiquitous location information has risen a requirement for hybrid positioning methods, as a continuous
5G positioning and hybridization with GNSS observations 1. Introduction Abstract The paradigm of ubiquitous location information has risen a requirement for hybrid positioning methods, as a continuous
Precise Positioning with Smartphones running Android 7 or later
 Precise Positioning with Smartphones running Android 7 or later * René Warnant, * Cécile Deprez, + Quentin Warnant * University of Liege Geodesy and GNSS + Augmenteo, Plaine Image, Lille (France) Belgian
Precise Positioning with Smartphones running Android 7 or later * René Warnant, * Cécile Deprez, + Quentin Warnant * University of Liege Geodesy and GNSS + Augmenteo, Plaine Image, Lille (France) Belgian
WHITE PAPER ABSTARCT. The new Quantum TM Algorithm by ComNav Technology July 2016
 WHITE PAPER The new Quantum TM Algorithm by ComNav Technology July 206 ABSTARCT The latest Quantum TM algorithm, as an upgrade of ComNav Technology Quan tm Algorithm, is a brand new technology that improves
WHITE PAPER The new Quantum TM Algorithm by ComNav Technology July 206 ABSTARCT The latest Quantum TM algorithm, as an upgrade of ComNav Technology Quan tm Algorithm, is a brand new technology that improves
Cooperative localization (part I) Jouni Rantakokko
 Jouni Rantakokko") Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
CODEVINTEC. Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems
 45 27 39.384 N 9 07 30.145 E Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems Aerospace Land/Automotive Marine Subsea Miniature inertial sensors 0.1 Ellipse Series New
45 27 39.384 N 9 07 30.145 E Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems Aerospace Land/Automotive Marine Subsea Miniature inertial sensors 0.1 Ellipse Series New
INTRODUCTION TO VEHICLE NAVIGATION SYSTEM LECTURE 5.1 SGU 4823 SATELLITE NAVIGATION
 INTRODUCTION TO VEHICLE NAVIGATION SYSTEM LECTURE 5.1 SGU 4823 SATELLITE NAVIGATION AzmiHassan SGU4823 SatNav 2012 1 Navigation Systems Navigation ( Localisation ) may be defined as the process of determining
INTRODUCTION TO VEHICLE NAVIGATION SYSTEM LECTURE 5.1 SGU 4823 SATELLITE NAVIGATION AzmiHassan SGU4823 SatNav 2012 1 Navigation Systems Navigation ( Localisation ) may be defined as the process of determining
Assessing & Mitigation of risks on railways operational scenarios
 R H I N O S Railway High Integrity Navigation Overlay System Assessing & Mitigation of risks on railways operational scenarios Rome, June 22 nd 2017 Anja Grosch, Ilaria Martini, Omar Garcia Crespillo (DLR)
R H I N O S Railway High Integrity Navigation Overlay System Assessing & Mitigation of risks on railways operational scenarios Rome, June 22 nd 2017 Anja Grosch, Ilaria Martini, Omar Garcia Crespillo (DLR)
SPEEDBOX Technical Datasheet
 SPEEDBOX Technical Datasheet Race Technology Limited, 2008 Version 1.1 1. Introduction... 3 1.1. Product Overview... 3 1.2. Applications... 3 1.3. Standard Features... 3 2. Port / Connector details...
SPEEDBOX Technical Datasheet Race Technology Limited, 2008 Version 1.1 1. Introduction... 3 1.1. Product Overview... 3 1.2. Applications... 3 1.3. Standard Features... 3 2. Port / Connector details...
Evaluation of GNSS for the realization of the autonomous car
 Evaluation of GNSS for the realization of the autonomous car 2015 Cross-ministerial Strategic Innovation Promotion Program Autonomous Driving WG AISAN TECHNOLOGY CO., LTD. Corporate Name Representative
Evaluation of GNSS for the realization of the autonomous car 2015 Cross-ministerial Strategic Innovation Promotion Program Autonomous Driving WG AISAN TECHNOLOGY CO., LTD. Corporate Name Representative
Inertial Navigation System
 Apogee Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Motion Sensing & Georeferencing APOGEE SERIES makes high accuracy affordable for all surveying companies.
Apogee Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Motion Sensing & Georeferencing APOGEE SERIES makes high accuracy affordable for all surveying companies.
Cooperative navigation (part II)
") Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Detection and Tracking of the Vanishing Point on a Horizon for Automotive Applications
 Detection and Tracking of the Vanishing Point on a Horizon for Automotive Applications Young-Woo Seo and Ragunathan (Raj) Rajkumar GM-CMU Autonomous Driving Collaborative Research Lab Carnegie Mellon University
Detection and Tracking of the Vanishing Point on a Horizon for Automotive Applications Young-Woo Seo and Ragunathan (Raj) Rajkumar GM-CMU Autonomous Driving Collaborative Research Lab Carnegie Mellon University
Global Navigation Satellite System (GNSS) for Disaster Mitigation
 for Disaster Mitigation") Global Navigation Satellite System (GNSS) for Disaster Mitigation By Chathura H. Wickramasinghe Geoinformatics Center Asian Institute of Technology Establish in 1959 as a Post Graduate School Catering
Global Navigation Satellite System (GNSS) for Disaster Mitigation By Chathura H. Wickramasinghe Geoinformatics Center Asian Institute of Technology Establish in 1959 as a Post Graduate School Catering
Experiences with Fugro's Real Time GPS/GLONASS Orbit/Clock Decimeter Level Precise Positioning System
 Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 13-14, 2009 Sensors Experiences with Fugro's Real Time GPS/GLONASS Orbit/Clock Decimeter Level Precise Positioning System Ole Ørpen and
Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 13-14, 2009 Sensors Experiences with Fugro's Real Time GPS/GLONASS Orbit/Clock Decimeter Level Precise Positioning System Ole Ørpen and
Positioning, location data and GNSS as solution for Autonomous driving
 Positioning, location data and GNSS as solution for Autonomous driving Jarkko Koskinen, Heidi Kuusniemi, Juha Hyyppä, Sarang Thombre and Martti Kirkko-Jaakkola FGI, NLS Definition of the Arctic 66 34 N
Positioning, location data and GNSS as solution for Autonomous driving Jarkko Koskinen, Heidi Kuusniemi, Juha Hyyppä, Sarang Thombre and Martti Kirkko-Jaakkola FGI, NLS Definition of the Arctic 66 34 N
AUTONOMOUS ISOTROPY-BASED INTEGRITY USING GPS AND GLONASS
 ION GNSS 2010 AUTONOMOUS ISOTROPY-BASED INTEGRITY USING GPS AND GLONASS SEPTEMBER 21-24, 2010 - PORTLAND, OREGON SESSION E4: INTEGRITY MONITORING FOR NEXT GENERATION APPLICATIONS M. Azaola D. Calle A.Mozo
ION GNSS 2010 AUTONOMOUS ISOTROPY-BASED INTEGRITY USING GPS AND GLONASS SEPTEMBER 21-24, 2010 - PORTLAND, OREGON SESSION E4: INTEGRITY MONITORING FOR NEXT GENERATION APPLICATIONS M. Azaola D. Calle A.Mozo
Inertial Sensors. Ellipse Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
GPS Application. Global Positioning System. We provide GPS module ODM / OEM service, any GPS receiver you want, we can provide customized services.
 GPS Application Global Positioning System We provide GPS module ODM / OEM service, any GPS receiver you want, we can provide customized services. www.win-tec.com.tw sales@win-tec.com.tw GNSS Receiver WGM-303
GPS Application Global Positioning System We provide GPS module ODM / OEM service, any GPS receiver you want, we can provide customized services. www.win-tec.com.tw sales@win-tec.com.tw GNSS Receiver WGM-303
Positioning Technique Based on Vehicle Trajectory Using GPS Raw Data and Low-cost IMU
 Jun-ichi Meguro et al./international Journal of Automotive Engineering 3 (212) 75-8 212432 Research Paper Positioning Technique Based on Vehicle Trajectory Using Raw Data and Low-cost IMU Jun-ichi Meguro
Jun-ichi Meguro et al./international Journal of Automotive Engineering 3 (212) 75-8 212432 Research Paper Positioning Technique Based on Vehicle Trajectory Using Raw Data and Low-cost IMU Jun-ichi Meguro
Surveying in the Year 2020
 Surveying in the Year 2020 Johannes Schwarz Leica Geosystems My first toys 2 1 3 Questions Why is a company like Leica Geosystems constantly developing new surveying products and instruments? What surveying
Surveying in the Year 2020 Johannes Schwarz Leica Geosystems My first toys 2 1 3 Questions Why is a company like Leica Geosystems constantly developing new surveying products and instruments? What surveying
Galileo as an instrument of unification of the European railway transport
 Railway Infrastructure Administration Galileo as an instrument of unification of the European railway transport by Hynek Mocek SŽDC, TÚDC - Laboratory of Intelligent Systems Pardubice,, Czech Republic
Railway Infrastructure Administration Galileo as an instrument of unification of the European railway transport by Hynek Mocek SŽDC, TÚDC - Laboratory of Intelligent Systems Pardubice,, Czech Republic
New Approach for Tsunami Detection Based on RTK-GNSS Using Network of Ships
 New Approach for Tsunami Detection Based on RTK-GNSS Using Network of Ships Tokyo University of Marine Science and Technology Ryuta Nakaosone Nobuaki Kubo Background After the Indian Ocean Tsunami on 2004,
New Approach for Tsunami Detection Based on RTK-GNSS Using Network of Ships Tokyo University of Marine Science and Technology Ryuta Nakaosone Nobuaki Kubo Background After the Indian Ocean Tsunami on 2004,
Utility of Sensor Fusion of GPS and Motion Sensor in Android Devices In GPS- Deprived Environment
 Utility of Sensor Fusion of GPS and Motion Sensor in Android Devices In GPS- Deprived Environment Amrit Karmacharya1 1 Land Management Training Center Bakhundol, Dhulikhel, Kavre, Nepal Tel:- +977-9841285489
Utility of Sensor Fusion of GPS and Motion Sensor in Android Devices In GPS- Deprived Environment Amrit Karmacharya1 1 Land Management Training Center Bakhundol, Dhulikhel, Kavre, Nepal Tel:- +977-9841285489
Integrated Navigation System
 Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Testing of GNSS Dual-Frequency with Smartphones
 Testing of GNSS Dual-Frequency with Smartphones Towards better location performance in mass market applications P. Crosta, G. Galluzzo, R. Orus, R. Lucas, ESA J. Redelkiewicz, GSA ESA UNCLASSIFIED - For
Testing of GNSS Dual-Frequency with Smartphones Towards better location performance in mass market applications P. Crosta, G. Galluzzo, R. Orus, R. Lucas, ESA J. Redelkiewicz, GSA ESA UNCLASSIFIED - For
Satellite and Inertial Attitude. A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu
 Satellite and Inertial Attitude and Positioning System A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu Outline Project Introduction Theoretical Background Inertial
Satellite and Inertial Attitude and Positioning System A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu Outline Project Introduction Theoretical Background Inertial
Connected Car Networking
 Connected Car Networking Teng Yang, Francis Wolff and Christos Papachristou Electrical Engineering and Computer Science Case Western Reserve University Cleveland, Ohio Outline Motivation Connected Car
Connected Car Networking Teng Yang, Francis Wolff and Christos Papachristou Electrical Engineering and Computer Science Case Western Reserve University Cleveland, Ohio Outline Motivation Connected Car
GPS-Based Navigation & Positioning Challenges in Communications- Enabled Driver Assistance Systems
 GPS-Based Navigation & Positioning Challenges in Communications- Enabled Driver Assistance Systems Chaminda Basnayake, Ph.D. Senior Research Engineer General Motors Research & Development and Planning
GPS-Based Navigation & Positioning Challenges in Communications- Enabled Driver Assistance Systems Chaminda Basnayake, Ph.D. Senior Research Engineer General Motors Research & Development and Planning
Advanced Methods to Identify Asphalt Pavement Delamination (R06D) Ground Penetrating Radar (GPR) Caltrans
 Ground Penetrating Radar (GPR) Caltrans") Advanced Methods to Identify Asphalt Pavement Delamination (R06D) Ground Penetrating Radar (GPR) Caltrans William Owen Peer Exchange August 1-3, 2018 Introduction How We Got Here Strategic Highway Research
Advanced Methods to Identify Asphalt Pavement Delamination (R06D) Ground Penetrating Radar (GPR) Caltrans William Owen Peer Exchange August 1-3, 2018 Introduction How We Got Here Strategic Highway Research
Including GNSS Based Heading in Inertial Aided GNSS DP Reference System
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 Sensors II SESSION Including GNSS Based Heading in Inertial Aided GNSS DP Reference System By Arne Rinnan, Nina
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 Sensors II SESSION Including GNSS Based Heading in Inertial Aided GNSS DP Reference System By Arne Rinnan, Nina
ABSTRACT: Three types of portable units with GNSS raw data recording capability are assessed to determine static and kinematic position accuracy
 ABSTRACT: Three types of portable units with GNSS raw data recording capability are assessed to determine static and kinematic position accuracy under various environments using alternatively their internal
ABSTRACT: Three types of portable units with GNSS raw data recording capability are assessed to determine static and kinematic position accuracy under various environments using alternatively their internal
Inertial Navigation System
 Apogee Marine Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Navigation, Motion & Heave Sensing APOGEE SERIES makes high accuracy affordable for all surveying
Apogee Marine Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Navigation, Motion & Heave Sensing APOGEE SERIES makes high accuracy affordable for all surveying
Innovation and Experience in GNSS Bridge Real Time 3D- Monitoring System
 Innovation and Experience in GNSS Bridge Real Time 3D- Monitoring System Joël van Cranenbroeck, Managing Director CGEOS Creative GeoSensing sprl-s Rue du Tienne de Mont, 11 5530 MONT, Belgium Transportation
Innovation and Experience in GNSS Bridge Real Time 3D- Monitoring System Joël van Cranenbroeck, Managing Director CGEOS Creative GeoSensing sprl-s Rue du Tienne de Mont, 11 5530 MONT, Belgium Transportation
How multipath error influences on ambiguity resolution
 How multipath error influences on ambiguity resolution Nobuaki Kubo, Akio Yasuda Tokyo University of Mercantile Marine BIOGRAPHY Nobuaki Kubo received his Master of Engineering (Electrical) in 99 from
How multipath error influences on ambiguity resolution Nobuaki Kubo, Akio Yasuda Tokyo University of Mercantile Marine BIOGRAPHY Nobuaki Kubo received his Master of Engineering (Electrical) in 99 from
Revisions Revision Date By Changes A 11 Feb 2013 MHA Initial release , Xsens Technologies B.V. All rights reserved. Information in this docum
 MTi 10-series and MTi 100-series Document MT0503P, Revision 0 (DRAFT), 11 Feb 2013 Xsens Technologies B.V. Pantheon 6a P.O. Box 559 7500 AN Enschede The Netherlands phone +31 (0)88 973 67 00 fax +31 (0)88
MTi 10-series and MTi 100-series Document MT0503P, Revision 0 (DRAFT), 11 Feb 2013 Xsens Technologies B.V. Pantheon 6a P.O. Box 559 7500 AN Enschede The Netherlands phone +31 (0)88 973 67 00 fax +31 (0)88
MARKSMAN DP-INS DYNAMIC POSITIONING INERTIAL REFERENCE SYSTEM
 cc MARKSMAN DP-INS DYNAMIC POSITIONING INERTIAL REFERENCE SYSTEM Sonardyne s Marksman DP-INS is an advanced navigation-based Position Measuring Equipment (PME) source for dynamically positioned (DP) rigs.
cc MARKSMAN DP-INS DYNAMIC POSITIONING INERTIAL REFERENCE SYSTEM Sonardyne s Marksman DP-INS is an advanced navigation-based Position Measuring Equipment (PME) source for dynamically positioned (DP) rigs.
Primer on GPS Operations
 MP Rugged Wireless Modem Primer on GPS Operations 2130313 Rev 1.0 Cover illustration by Emma Jantz-Lee (age 11). An Introduction to GPS This primer is intended to provide the foundation for understanding
MP Rugged Wireless Modem Primer on GPS Operations 2130313 Rev 1.0 Cover illustration by Emma Jantz-Lee (age 11). An Introduction to GPS This primer is intended to provide the foundation for understanding
Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation
 Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation Zhaonian Zhang, Department of Geomatics Engineering, The University of Calgary BIOGRAPHY Zhaonian Zhang is a MSc student
Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation Zhaonian Zhang, Department of Geomatics Engineering, The University of Calgary BIOGRAPHY Zhaonian Zhang is a MSc student
ITS Radiocommunications in Japan Progress report and future directions
 ITS Radiocommunications in Japan Progress report and future directions 6 March 2018 Berlin, Germany Tomoaki Ishii Assistant Director, New-Generation Mobile Communications Office, Radio Dept., Telecommunications
ITS Radiocommunications in Japan Progress report and future directions 6 March 2018 Berlin, Germany Tomoaki Ishii Assistant Director, New-Generation Mobile Communications Office, Radio Dept., Telecommunications
Utilizing Batch Processing for GNSS Signal Tracking
 Utilizing Batch Processing for GNSS Signal Tracking Andrey Soloviev Avionics Engineering Center, Ohio University Presented to: ION Alberta Section, Calgary, Canada February 27, 2007 Motivation: Outline
Utilizing Batch Processing for GNSS Signal Tracking Andrey Soloviev Avionics Engineering Center, Ohio University Presented to: ION Alberta Section, Calgary, Canada February 27, 2007 Motivation: Outline
HIGHTS: towards sub-meter positioning accuracy in vehicular networks. Jérôme Härri (EURECOM) on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018
 on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018") HIGHTS: towards sub-meter positioning accuracy in vehicular networks Jérôme Härri (EURECOM) on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018 The HIGHTS Consortium 09.03.2018 H2020 HIGHTS Project 2
HIGHTS: towards sub-meter positioning accuracy in vehicular networks Jérôme Härri (EURECOM) on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018 The HIGHTS Consortium 09.03.2018 H2020 HIGHTS Project 2
Tersus RTK Competitive Analysis
 Test Report Jun 2018 Tersus RTK Competitive Analysis 2018 Tersus GNSS Inc. All rights reserved. Sales & Technical Support: sales@tersus-gnss.com & support@tersus-gnss.com More details, please visit www.tersus-gnss.com
Test Report Jun 2018 Tersus RTK Competitive Analysis 2018 Tersus GNSS Inc. All rights reserved. Sales & Technical Support: sales@tersus-gnss.com & support@tersus-gnss.com More details, please visit www.tersus-gnss.com
NAV CAR Lane-sensitive positioning and navigation for innovative ITS services AMAA, May 31 st, 2012 E. Schoitsch, E. Althammer, R.
 NAV CAR Lane-sensitive positioning and navigation for innovative ITS services AMAA, May 31 st, 2012 E. Schoitsch, E. Althammer, R. Kloibhofer (AIT), R. Spielhofer, M. Reinthaler, P. Nitsche (ÖFPZ), H.
NAV CAR Lane-sensitive positioning and navigation for innovative ITS services AMAA, May 31 st, 2012 E. Schoitsch, E. Althammer, R. Kloibhofer (AIT), R. Spielhofer, M. Reinthaler, P. Nitsche (ÖFPZ), H.
PerSec. Pervasive Computing and Security Lab. Enabling Transportation Safety Services Using Mobile Devices
 PerSec Pervasive Computing and Security Lab Enabling Transportation Safety Services Using Mobile Devices Jie Yang Department of Computer Science Florida State University Oct. 17, 2017 CIS 5935 Introduction
PerSec Pervasive Computing and Security Lab Enabling Transportation Safety Services Using Mobile Devices Jie Yang Department of Computer Science Florida State University Oct. 17, 2017 CIS 5935 Introduction
EXPERIMENTAL RESULTS OF LEX CORRECTIONS USING FARMING MACHINE
 Sixth Meeting of the International Committee on Global Navigation Satellite Systems (ICG) EXPERIMENTAL RESULTS OF LEX CORRECTIONS USING FARMING MACHINE Masayuki Kanzaki Hitachi Zosen Corporation Prof.
Sixth Meeting of the International Committee on Global Navigation Satellite Systems (ICG) EXPERIMENTAL RESULTS OF LEX CORRECTIONS USING FARMING MACHINE Masayuki Kanzaki Hitachi Zosen Corporation Prof.
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
An Information Fusion Method for Vehicle Positioning System
 An Information Fusion Method for Vehicle Positioning System Yi Yan, Che-Cheng Chang and Wun-Sheng Yao Abstract Vehicle positioning techniques have a broad application in advanced driver assistant system
An Information Fusion Method for Vehicle Positioning System Yi Yan, Che-Cheng Chang and Wun-Sheng Yao Abstract Vehicle positioning techniques have a broad application in advanced driver assistant system
Integration of Inertial Measurements with GNSS -NovAtel SPAN Architecture-
 Integration of Inertial Measurements with GNSS -NovAtel SPAN Architecture- Sandy Kennedy, Jason Hamilton NovAtel Inc., Canada Edgar v. Hinueber imar GmbH, Germany ABSTRACT As a GNSS system manufacturer,
Integration of Inertial Measurements with GNSS -NovAtel SPAN Architecture- Sandy Kennedy, Jason Hamilton NovAtel Inc., Canada Edgar v. Hinueber imar GmbH, Germany ABSTRACT As a GNSS system manufacturer,
On the Road to Driverless. Personal cars and commercial trucks are. Differential GNSS+INS for Land Vehicle Autonomous Navigation Qualification
 » COVER STORY MERCEDES vision of future mobility, autonomous driving. On the Road to Driverless Differential GNSS+INS for Land Vehicle Autonomous Navigation Qualification Land-vehicle autonomous navigation
» COVER STORY MERCEDES vision of future mobility, autonomous driving. On the Road to Driverless Differential GNSS+INS for Land Vehicle Autonomous Navigation Qualification Land-vehicle autonomous navigation
GPS and Recent Alternatives for Localisation. Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney
 GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
GL1DE. Introducing NovAtel s. Technology. Precise thinking.
 Introducing NovAtel s GLDE Technology Precise thinking 28 NovAtel Inc. All rights reserved. Printed in Canada. D239 www.novatel.com -8-NOVATEL (U.S. & Canada) or 43-295-49 Europe +44 () 993 852-436 SE
Introducing NovAtel s GLDE Technology Precise thinking 28 NovAtel Inc. All rights reserved. Printed in Canada. D239 www.novatel.com -8-NOVATEL (U.S. & Canada) or 43-295-49 Europe +44 () 993 852-436 SE
A new Modular and Open Concept for the Maritime Integrated PNT System
 A new Modular and Open Concept for the Maritime Integrated PNT System T. Noack German Aerospace Center Institute of Communications and Navigation www.dlr.de Chart 2 MTS-2012 Maritime Integrated PNT Unit
A new Modular and Open Concept for the Maritime Integrated PNT System T. Noack German Aerospace Center Institute of Communications and Navigation www.dlr.de Chart 2 MTS-2012 Maritime Integrated PNT Unit
Carrier Phase GPS Augmentation Using Laser Scanners and Using Low Earth Orbiting Satellites
 Carrier Phase GPS Augmentation Using Laser Scanners and Using Low Earth Orbiting Satellites Colloquium on Satellite Navigation at TU München Mathieu Joerger December 15 th 2009 1 Navigation using Carrier
Carrier Phase GPS Augmentation Using Laser Scanners and Using Low Earth Orbiting Satellites Colloquium on Satellite Navigation at TU München Mathieu Joerger December 15 th 2009 1 Navigation using Carrier
Real time pedestrian navigation system
 Real time pedestrian navigation system Damien Kubrak, Christophe Macabiau, Michel Monnerat To cite this version: Damien Kubrak, Christophe Macabiau, Michel Monnerat. Real time pedestrian navigation system.
Real time pedestrian navigation system Damien Kubrak, Christophe Macabiau, Michel Monnerat To cite this version: Damien Kubrak, Christophe Macabiau, Michel Monnerat. Real time pedestrian navigation system.
ATLANS-C. mobile mapping position and orientation solution
 mobile mapping position and orientation solution mobile mapping position and orientation solution THE SMALLEST ATLANS-C is a high performance all-in-one position and orientation solution for both land
mobile mapping position and orientation solution mobile mapping position and orientation solution THE SMALLEST ATLANS-C is a high performance all-in-one position and orientation solution for both land
gogps a navigation software to enhance the accuracy of low-cost GPS receivers Eugenio Realini Mirko Reguzzoni Osaka City University, Japan
 gogps a navigation software to enhance the accuracy of low-cost GPS receivers Eugenio Realini Osaka City University, Japan Oct. 21st FOSS4G2009 Mirko Reguzzoni OGS c/o Politecnico di Milano, Italy Why
gogps a navigation software to enhance the accuracy of low-cost GPS receivers Eugenio Realini Osaka City University, Japan Oct. 21st FOSS4G2009 Mirko Reguzzoni OGS c/o Politecnico di Milano, Italy Why
Precise Robust Positioning with Inertial/GPS RTK
 Precise Robust Positioning with Inertial/GPS RTK Bruno M. Scherzinger, Applanix Corporation, Richmond Hill, Ontario, Canada BIOGRAPHY Dr. Bruno M. Scherzinger obtained the B.Eng. degree from McGill University
Precise Robust Positioning with Inertial/GPS RTK Bruno M. Scherzinger, Applanix Corporation, Richmond Hill, Ontario, Canada BIOGRAPHY Dr. Bruno M. Scherzinger obtained the B.Eng. degree from McGill University