Carrier Phase GPS Augmentation Using Laser Scanners and Using Low Earth Orbiting Satellites
|
|
|
- Isabel Gardner
- 6 years ago
- Views:
Transcription

1 Carrier Phase GPS Augmentation Using Laser Scanners and Using Low Earth Orbiting Satellites Colloquium on Satellite Navigation at TU München Mathieu Joerger December 15 th



2 Navigation using Carrier Phase GPS Carrier Phase GPS has the potential to enable a variety of applications demanding high-accuracy and high-integrity. Limitations will be addressed in this work using ranging augmentation systems Precision Approach of Aircraft Shipboard Relative GPS Autonomous Airborne Refueling 2
3 GPS Ranging Measurements Code phase measurements provide an instantaneous, unambiguous measure of range with a receiver tracking error of approximately 1m. s e x s L, k k k k, k e x N s s s L, k k k k, k Carrier phase measurements Code (ρ) Carrier ( ) have a tracking error of about 1cm can only be tracked by receivers mod(2π) Local Frame user - s e k x k, k 3
4 Cycle Ambiguity Resolution Measurement redundancy (instantaneous) five or more ranging sources are needed to provide observability on cycle ambiguities SV motion (over time) provides additional observability over time e x t t t t N t L s s s e x t t t t N t L s s s t t Slow GPS L.O.S. Changes reliable cycle ambiguity estimation over short time periods is challenging 4
5 Land Navigation in GPS-Obstructed Areas GPS signals are easily attenuated or blocked by buildings, trees or rugged terrain. 2. Weak GPS signal power Fewer measurements The process of estimating cycle ambiguity biases N is reset if the line-of-sight is obstructed. Code (ρ) Carrier ( ) 5
6 Measurement Error Sources Measurement error sources (RMS error: 3-10m) Satellite clock and orbit ephemeris Ionosphere and troposphere Multipath and receiver noise e x E I T s s u s s s L, k k k k k k k, k e x N E I T s s s s s s L, k k k k k k k, k 6
7 Differential GPS Measurement error sources (RMS error: 3-10m) Satellite clock and orbit ephemeris Ionosphere and troposphere Multipath and receiver noise ~ 1 m () / ~ 1cm () s s ek xk k, k e x N s s s s k k k, k 3. Local reference station Robust carrier phase GPS requires corrections from a local reference station. Reference station 7
8 Outline Limitations of Carrier Phase GPS weak GPS signal power challenging cycle ambiguity estimation need for corrections from a local reference station GPS Augmentation Using Laser Scanners for navigation in GPS-obstructed environments GPS Augmentation Using Low Earth Orbit (LEO) Satellites in a system named igps for fast floating cycle ambiguity estimation and global high-integrity positioning (igps slides not included in this document) 8
9 Laser-Augmented CPDGPS 9
 vehicle positioning without")

 Problem.")
10 CPDGPS Testing Platform Prior Work on AGVs Can we use obstacles (static) as landmarks? Laser for Obstacle Detection Simultaneous Localization And Mapping: SLAM (1990 s) vehicle positioning without prior knowledge of obstacle location originally for indoor applications, typically used with deadreckoning sensors MIT: Leonard, J., and H. Durrant-Whyte. Directed Sonar Sensing for Mobile Robot Navigation. Cambridge, MA: Kluwer Academic Publishers (1992). University of Sydney: Dissanayake, G., P. Newman, S. Clark, H. Durrant-Whyte, and M. Csorba. A Solution to the Simultaneous Localization and Map Building (SLAM) Problem. IEEE Transactions on Robotics Automation (2001) 10
11 Motivation and Objective C/No for PRN 9 (db-hz) Time CPDGPS LASER SLAM UNIFIED NAVIGATION SOLUTION Range-Domain Integration of GPS and Laser Measurements 11


12 Outline for Laser-Augmented CPDGPS LASER-based Simultaneous Localization And Mapping measurement-level integration algorithm and analysis Experimental testing in urban canyons 12
13 LASER-Based SLAM 13
14 Raw Laser Data Processing Laser emitter/receiver Rotating mirror Angle Laser range-limit Obstacle Range RAW Select and Assign Measurements To Extended Kalman Filter (EKF) 14
15 15 Feature Extraction A B a d a b d b Y X a a p p d 2 2 Y X b b p p d 1 A B 2 To the EKF Data Association a d a b d b A B Feature Extraction Vehicle Tree trunk Noise RAW DATA RAW To EKF Select Data Association Feature Extraction Assign Vehicle (2 back-to-back scanners) Tree trunk Noise
16 16 Feature Extraction A B a d a b d b Y X a a p p d 2 2 Y X b b p p d 1 A B 2 To the EKF Data Association a d a b d b A B Feature Extraction RAW To EKF Here feature = center of tree trunk Select Data Association Feature Extraction Assign
17 Data Association Data Association (over consecutive epochs) 1 A B 2 Meas. d A 1 B 2 a a p p b d p b p Feat. 1 X 1 Y 2 X 2 Y Meas. are associated with landmarks (with the EKF s predicted position estimate) using a nearest neighbor approach Select Feature Extraction Assign Data Association State prediction RAW To EKF Matched observations 17
18 North i p N x N 2-D Model and Estimation Process d i i i i p x N N arctan i p x E E i i 2 i 2 E E N N d d p x p x x E i p E East From literature review and analysis : SLAM provides positioning relative to an initial estimate. The SLAM position error drifts with distance. (compared to CPDGPS which provides absolute position). 18
19 Measurement-Level Integration 19
20 GPS/Laser Integration Derived a measurement differencing EKF, which is a unified and compact filter capable of processing: GPS LASER time-correlated carrier phase GPS measurements non-linear laser measurements Select Data Feature Extraction SLAM i, i d Assign Data Data Association ESTIMATION Measurement- Differencing Extended KF j State Prediction p, E j p N POSITION and orientation 20
21 GPS/Laser Integration Linearized measurement equation: x n S ρ G ε ρ n S ns φ G 0 1 I 0 ε = + φ ν d νθ d F d, x F d, p L N n θ F k θ, x Fθ, p p k Process equation: Block matrices k xv ΦV 0 0 xv uv wv N = 0 In 0 S N p 0 0 I p 0 0 L k+1 n k k k u x = x T V V N 0 P 0 V T T T Illustrate the performance in forest scenario 21
22 Example Forest Scenario Direct simulation: trees modeled as vertical cylinders tree canopy modeled as a horizontal plane no GPS signals from low elevation satellites inside the forest (they would be altered by multipath) Model for the Forest 22
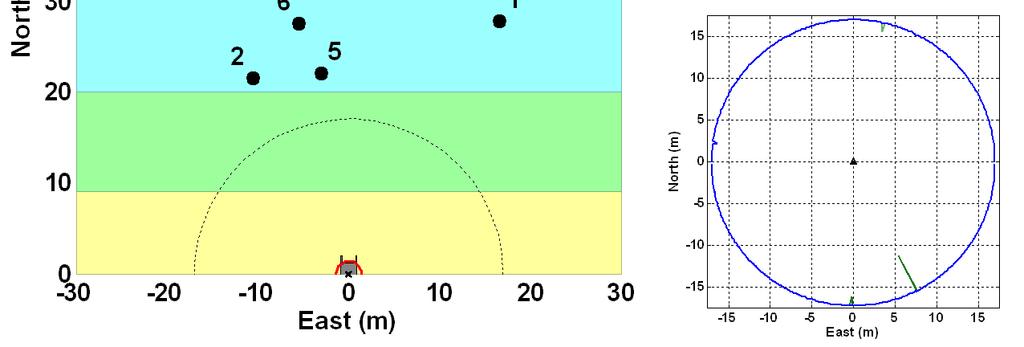
23 Time: 11 s 60 GPS Only Laser-based SLAM 50 GPS and LASER GPS 40 Simulation North (m) -30 Forest LASER Only - Street 2 Testing Forest Scenario: Direct Simulation Vehicle and Landmarks Position Estimation 6 Vehicle Laser Scanner Range 0-30 Limit East (m) Trees Covariance Ellipses (x70) North (m) W N GPS Satellite Blockage due to the Forest E S 150 Simulated Laser Data, Extraction and 5 Association East (m) 23
24 60 Forest Scenario: Direct Simulation Time: 11 s GPS Satellite Blockage due to the Forest N W E North (m) Vehicle and Landmarks 6 Position Estimation East (m) North (m) S 150 clear blocked Simulated Laser Data, Extraction and 5 Association East (m) 24
25 Forest Scenario: Direct Simulation N 60 Time: 11 s W GPS Satellite Blockage due to the Forest E North (m) Vehicle and Landmarks 6 Position Estimation S North (m) 10 5 Simulated Laser Data, Extraction and Association East (m) 0-5 raw (noise) filtered extracted associated East (m) 25

26 Forest Scenario: Direct Simulation 26
27 Forest Scenario: Direct Simulation In summary, the measurement domain integration achieves seamless navigation through GPS-denied areas: extends availability of absolute precise position fixes uses laser data for fast cycle ambiguity re-estimation at the exit (avoids restarting the process from scratch) Overall the system enables the storage and transmission of absolute position information. The transitional (green) area is further investigated in urban canyons. 27
28 Experimental Testing in Urban Canyons 28
29 Range-Domain Integration Position-domain Integration Position CPDGPS Algorithm Laser Position Range-domain Integration Output Position CPDGPS Laser Measurement Algorithm Measurement Output Position < 3 SV (2D position) > 1 SV (Rx clock) 29
30 Testing in a Structured Environment Landmarks are clearly identifiable and sparsely distributed, meaning that they can robustly be extracted and associated Fault-Free case 30
31 Testing in a Structured Environment Simulated satellite blockage 10m wide street, 50m high buildings (truth trajectory computed using CPDGPS) Time-tagged GPS and laser measurements for synchronization 31
32 East (m) Fault-Free Positioning Result Range-domain Integration -0.5 Actual data (estimated-truth) 610 Time (s) Position-domain Integration < 3 satellites Covariance envelopes East (m) Time (s) 32




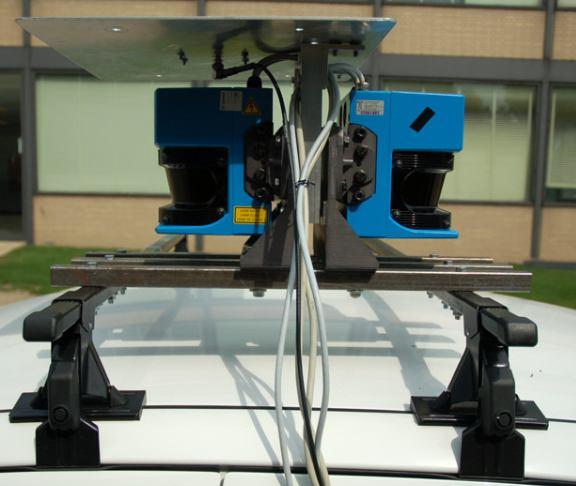
33 Experimental Setup 33

34 Natural Environment Noisy laser scans cause: poor SLAM performance. Sky blockage causes: poor GPS performance. The goal is to quantify the combined performance. 34

35 True Trajectory and Landmark Location Missed association estimated landmark location range domain position domain
36 Experimental Results East (m) Range-domain Integration < 3 satellites Time (s) Position-domain Integration 1 < 3 sat East (m) 0-1 Missed association Time (s) 36
37 for CPDGPS/Laser LASER extends the availability of precise CPDGPS position fixes (forest scenario). With the range-domain integration, additional GPS ranging measurements: - contribute to the estimation process (Fault-Free) - Increase the robustness of SLAM (by reducing occurrences of Missed Associations) Future work includes the implementation of more elaborate feature extraction and data association procedures. 37
38 Low Earth Orbiting (LEO) Satellite- Augmented GPS (slides not included) 38
39 39
40 Summary We have addressed limitations of carrier phase GPS by exploiting complementary properties of: GPS Open-sky areas Absolute range Laser Scanner Presence of obstacles Relative range Extended availability of precise positioning Increased robustness of SLAM (data association) GPS Worldwide coverage of 4 SVs continuous tracking of >4 signals over time Iridium Worldwide coverage of 1 SV Fast satellite motion Wide area corrections and measurement error models Redundancy for cycle estimation & fault detection Fast cycle ambiguity estimation At continental scale 40
41 Current and Future Work Investigate integrity of data association in SLAM overall probability of missed associations algorithm for detection of missed associations Refine measurement error and fault modeling Ionospheric delay (low elevation), ionospheric anomalies Iridium satellite orbit ephemeris errors Derive new fault-detection algorithms theoretical worst-case faults extended-window algorithm to avoid poor Iridium geometries Explore high-integrity multi-constellation navigation systems detection of multiple simultaneous faults fault identification and exclusion 41
42 Acknowledgements Sponsors The Boeing Company and the Naval Research Laboratory Advisor Dr. Boris Pervan NavLab Members Fang C. Chan, Livio Gratton, Moon B. Heo, Jing Jing, Bartosz Kempny, Samer Khanafseh, Steven Langel, Jason Neale, 42
43 END 43
Measurement Error and Fault Models for Multi-Constellation Navigation Systems. Mathieu Joerger Illinois Institute of Technology
 Measurement Error and Fault Models for Multi-Constellation Navigation Systems Mathieu Joerger Illinois Institute of Technology Colloquium on Satellite Navigation at TU München May 16, 2011 1 Multi-Constellation
Measurement Error and Fault Models for Multi-Constellation Navigation Systems Mathieu Joerger Illinois Institute of Technology Colloquium on Satellite Navigation at TU München May 16, 2011 1 Multi-Constellation
CARRIER PHASE GPS AUGMENTATION USING LASER SCANNERS AND USING LOW EARTH ORBITING SATELLITES MATHIEU JOERGER
 CARRIER PHASE GPS AUGMENTATION USING LASER SCANNERS AND USING LOW EARTH ORBITING SATELLITES BY MATHIEU JOERGER Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy
CARRIER PHASE GPS AUGMENTATION USING LASER SCANNERS AND USING LOW EARTH ORBITING SATELLITES BY MATHIEU JOERGER Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy
Carrier Phase DGPS for Autonomous Airborne Refueling
 Carrier Phase DGPS for Autonomous Airborne Refueling Samer Khanafseh and Boris Pervan, Illinois Institute of Technology, Chicago, IL Glenn Colby, Naval Air Warfare Center, Patuxent River, MD ABSTRACT For
Carrier Phase DGPS for Autonomous Airborne Refueling Samer Khanafseh and Boris Pervan, Illinois Institute of Technology, Chicago, IL Glenn Colby, Naval Air Warfare Center, Patuxent River, MD ABSTRACT For
Assessing & Mitigation of risks on railways operational scenarios
 R H I N O S Railway High Integrity Navigation Overlay System Assessing & Mitigation of risks on railways operational scenarios Rome, June 22 nd 2017 Anja Grosch, Ilaria Martini, Omar Garcia Crespillo (DLR)
R H I N O S Railway High Integrity Navigation Overlay System Assessing & Mitigation of risks on railways operational scenarios Rome, June 22 nd 2017 Anja Grosch, Ilaria Martini, Omar Garcia Crespillo (DLR)
GPS NAVIGATION ALGORITHMS FOR AUTONOMOUS AIRBORNE REFUELING OF UNMANNED AIR VEHICLES SAMER MAHMOUD KHANAFSEH
 GPS NAVIGATION ALGORITHMS FOR AUTONOMOUS AIRBORNE REFUELING OF UNMANNED AIR VEHICLES BY SAMER MAHMOUD KHANAFSEH Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy
GPS NAVIGATION ALGORITHMS FOR AUTONOMOUS AIRBORNE REFUELING OF UNMANNED AIR VEHICLES BY SAMER MAHMOUD KHANAFSEH Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy
Worst-Case GPS Constellation for Testing Navigation at Geosynchronous Orbit for GOES-R
 Worst-Case GPS Constellation for Testing Navigation at Geosynchronous Orbit for GOES-R Kristin Larson, Dave Gaylor, and Stephen Winkler Emergent Space Technologies and Lockheed Martin Space Systems 36
Worst-Case GPS Constellation for Testing Navigation at Geosynchronous Orbit for GOES-R Kristin Larson, Dave Gaylor, and Stephen Winkler Emergent Space Technologies and Lockheed Martin Space Systems 36
Global Navigation Satellite Systems II
 Global Navigation Satellite Systems II AERO4701 Space Engineering 3 Week 4 Last Week Examined the problem of satellite coverage and constellation design Looked at the GPS satellite constellation Overview
Global Navigation Satellite Systems II AERO4701 Space Engineering 3 Week 4 Last Week Examined the problem of satellite coverage and constellation design Looked at the GPS satellite constellation Overview
Modelling GPS Observables for Time Transfer
 Modelling GPS Observables for Time Transfer Marek Ziebart Department of Geomatic Engineering University College London Presentation structure Overview of GPS Time frames in GPS Introduction to GPS observables
Modelling GPS Observables for Time Transfer Marek Ziebart Department of Geomatic Engineering University College London Presentation structure Overview of GPS Time frames in GPS Introduction to GPS observables
IONOSPHERIC ERROR MODELING FOR HIGH INTEGRITY CARRIER PHASE POSITIONING JASON WILLIAM NEALE
 IONOSPHERIC ERROR MODELING FOR HIGH INTEGRITY CARRIER PHASE POSITIONING BY JASON WILLIAM NEALE Submitted in partial fulfillment of the requirements for the degree of Master of Science in Aerospace and
IONOSPHERIC ERROR MODELING FOR HIGH INTEGRITY CARRIER PHASE POSITIONING BY JASON WILLIAM NEALE Submitted in partial fulfillment of the requirements for the degree of Master of Science in Aerospace and
A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology
 A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology Tatyana Bourke, Applanix Corporation Abstract This paper describes a post-processing software package that
A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology Tatyana Bourke, Applanix Corporation Abstract This paper describes a post-processing software package that
GPS and Recent Alternatives for Localisation. Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney
 GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
ARAIM Integrity Support Message Parameter Validation by Online Ground Monitoring
 ARAIM Integrity Support Message Parameter Validation by Online Ground Monitoring Samer Khanafseh, Mathieu Joerger, Fang Cheng-Chan and Boris Pervan Illinois Institute of Technology, Chicago, IL ABSTRACT
ARAIM Integrity Support Message Parameter Validation by Online Ground Monitoring Samer Khanafseh, Mathieu Joerger, Fang Cheng-Chan and Boris Pervan Illinois Institute of Technology, Chicago, IL ABSTRACT
Experiences with Fugro's Real Time GPS/GLONASS Orbit/Clock Decimeter Level Precise Positioning System
 Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 13-14, 2009 Sensors Experiences with Fugro's Real Time GPS/GLONASS Orbit/Clock Decimeter Level Precise Positioning System Ole Ørpen and
Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 13-14, 2009 Sensors Experiences with Fugro's Real Time GPS/GLONASS Orbit/Clock Decimeter Level Precise Positioning System Ole Ørpen and
UNIT 1 - introduction to GPS
 UNIT 1 - introduction to GPS 1. GPS SIGNAL Each GPS satellite transmit two signal for positioning purposes: L1 signal (carrier frequency of 1,575.42 MHz). Modulated onto the L1 carrier are two pseudorandom
UNIT 1 - introduction to GPS 1. GPS SIGNAL Each GPS satellite transmit two signal for positioning purposes: L1 signal (carrier frequency of 1,575.42 MHz). Modulated onto the L1 carrier are two pseudorandom
Guochang Xu GPS. Theory, Algorithms and Applications. Second Edition. With 59 Figures. Sprin ger
 Guochang Xu GPS Theory, Algorithms and Applications Second Edition With 59 Figures Sprin ger Contents 1 Introduction 1 1.1 AKeyNoteofGPS 2 1.2 A Brief Message About GLONASS 3 1.3 Basic Information of Galileo
Guochang Xu GPS Theory, Algorithms and Applications Second Edition With 59 Figures Sprin ger Contents 1 Introduction 1 1.1 AKeyNoteofGPS 2 1.2 A Brief Message About GLONASS 3 1.3 Basic Information of Galileo
Methodology and Case Studies of Signal-in-Space Error Calculation
 Methodology and Case Studies of Signal-in-Space Error Calculation Top-down Meets Bottom-up Grace Xingxin Gao *, Haochen Tang *, Juan Blanch *, Jiyun Lee +, Todd Walter * and Per Enge * * Stanford University,
Methodology and Case Studies of Signal-in-Space Error Calculation Top-down Meets Bottom-up Grace Xingxin Gao *, Haochen Tang *, Juan Blanch *, Jiyun Lee +, Todd Walter * and Per Enge * * Stanford University,
Effect of Quasi Zenith Satellite (QZS) on GPS Positioning
 on GPS Positioning") Effect of Quasi Zenith Satellite (QZS) on GPS ing Tomoji Takasu 1, Takuji Ebinuma 2, and Akio Yasuda 3 Laboratory of Satellite Navigation, Tokyo University of Marine Science and Technology 1 (Tel: +81-5245-7365,
Effect of Quasi Zenith Satellite (QZS) on GPS ing Tomoji Takasu 1, Takuji Ebinuma 2, and Akio Yasuda 3 Laboratory of Satellite Navigation, Tokyo University of Marine Science and Technology 1 (Tel: +81-5245-7365,
Improved GPS Carrier Phase Tracking in Difficult Environments Using Vector Tracking Approach
 Improved GPS Carrier Phase Tracking in Difficult Environments Using Vector Tracking Approach Scott M. Martin David M. Bevly Auburn University GPS and Vehicle Dynamics Laboratory Presentation Overview Introduction
Improved GPS Carrier Phase Tracking in Difficult Environments Using Vector Tracking Approach Scott M. Martin David M. Bevly Auburn University GPS and Vehicle Dynamics Laboratory Presentation Overview Introduction
ARAIM Fault Detection and Exclusion
 ARAIM Fault Detection and Exclusion Boris Pervan Illinois Institute of Technology Chicago, IL November 16, 2017 1 RAIM ARAIM Receiver Autonomous Integrity Monitoring (RAIM) uses redundant GNSS measurements
ARAIM Fault Detection and Exclusion Boris Pervan Illinois Institute of Technology Chicago, IL November 16, 2017 1 RAIM ARAIM Receiver Autonomous Integrity Monitoring (RAIM) uses redundant GNSS measurements
Signals, and Receivers
 ENGINEERING SATELLITE-BASED NAVIGATION AND TIMING Global Navigation Satellite Systems, Signals, and Receivers John W. Betz IEEE IEEE PRESS Wiley CONTENTS Preface Acknowledgments Useful Constants List of
ENGINEERING SATELLITE-BASED NAVIGATION AND TIMING Global Navigation Satellite Systems, Signals, and Receivers John W. Betz IEEE IEEE PRESS Wiley CONTENTS Preface Acknowledgments Useful Constants List of
Broadcast Ionospheric Model Accuracy and the Effect of Neglecting Ionospheric Effects on C/A Code Measurements on a 500 km Baseline
 Broadcast Ionospheric Model Accuracy and the Effect of Neglecting Ionospheric Effects on C/A Code Measurements on a 500 km Baseline Intro By David MacDonald Waypoint Consulting May 2002 The ionosphere
Broadcast Ionospheric Model Accuracy and the Effect of Neglecting Ionospheric Effects on C/A Code Measurements on a 500 km Baseline Intro By David MacDonald Waypoint Consulting May 2002 The ionosphere
Boeing Timing & Location
 Boeing Defense, Space & Security PhantomWorks Boeing Timing & Location An Indoor Capable Time Transfer and Geolocation System Presentation Stanford PNT Symposium David Whelan Gregory Gutt Per Enge November
Boeing Defense, Space & Security PhantomWorks Boeing Timing & Location An Indoor Capable Time Transfer and Geolocation System Presentation Stanford PNT Symposium David Whelan Gregory Gutt Per Enge November
Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation
 Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation Zhaonian Zhang, Department of Geomatics Engineering, The University of Calgary BIOGRAPHY Zhaonian Zhang is a MSc student
Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation Zhaonian Zhang, Department of Geomatics Engineering, The University of Calgary BIOGRAPHY Zhaonian Zhang is a MSc student
Unmanned Air Systems. Naval Unmanned Combat. Precision Navigation for Critical Operations. DEFENSE Precision Navigation
 NAVAIR Public Release 2012-152. Distribution Statement A - Approved for public release; distribution is unlimited. FIGURE 1 Autonomous air refuleing operational view. Unmanned Air Systems Precision Navigation
NAVAIR Public Release 2012-152. Distribution Statement A - Approved for public release; distribution is unlimited. FIGURE 1 Autonomous air refuleing operational view. Unmanned Air Systems Precision Navigation
TREATMENT OF DIFFRACTION EFFECTS CAUSED BY MOUNTAIN RIDGES
 TREATMENT OF DIFFRACTION EFFECTS CAUSED BY MOUNTAIN RIDGES Rainer Klostius, Andreas Wieser, Fritz K. Brunner Institute of Engineering Geodesy and Measurement Systems, Graz University of Technology, Steyrergasse
TREATMENT OF DIFFRACTION EFFECTS CAUSED BY MOUNTAIN RIDGES Rainer Klostius, Andreas Wieser, Fritz K. Brunner Institute of Engineering Geodesy and Measurement Systems, Graz University of Technology, Steyrergasse
GPS data correction using encoders and INS sensors
 GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
Currently installed Local
 Reducing the Jitters How a Chip-Scale Atomic Clock Can Help Mitigate Broadband Interference Fang-Cheng Chan, Mathieu Joerger, Samer Khanafseh, Boris Pervan, and Ondrej Jakubov THE GLOBAL POSITIONING SYSTEM
Reducing the Jitters How a Chip-Scale Atomic Clock Can Help Mitigate Broadband Interference Fang-Cheng Chan, Mathieu Joerger, Samer Khanafseh, Boris Pervan, and Ondrej Jakubov THE GLOBAL POSITIONING SYSTEM
Cooperative navigation: outline
 Positioning and Navigation in GPS-challenged Environments: Cooperative Navigation Concept Dorota A Grejner-Brzezinska, Charles K Toth, Jong-Ki Lee and Xiankun Wang Satellite Positioning and Inertial Navigation
Positioning and Navigation in GPS-challenged Environments: Cooperative Navigation Concept Dorota A Grejner-Brzezinska, Charles K Toth, Jong-Ki Lee and Xiankun Wang Satellite Positioning and Inertial Navigation
The Benefits of Three Frequencies for the High Accuracy Positioning
 The Benefits of Three Frequencies for the High Accuracy Positioning Nobuaki Kubo (Tokyo University of Marine and Science Technology) Akio Yasuda (Tokyo University of Marine and Science Technology) Isao
The Benefits of Three Frequencies for the High Accuracy Positioning Nobuaki Kubo (Tokyo University of Marine and Science Technology) Akio Yasuda (Tokyo University of Marine and Science Technology) Isao
SPAN Technology System Characteristics and Performance
 SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
Mobile Target Tracking Using Radio Sensor Network
 Mobile Target Tracking Using Radio Sensor Network Nic Auth Grant Hovey Advisor: Dr. Suruz Miah Department of Electrical and Computer Engineering Bradley University 1501 W. Bradley Avenue Peoria, IL, 61625,
Mobile Target Tracking Using Radio Sensor Network Nic Auth Grant Hovey Advisor: Dr. Suruz Miah Department of Electrical and Computer Engineering Bradley University 1501 W. Bradley Avenue Peoria, IL, 61625,
Coherent Navigation. Stanford PNT Symposium Copyright 2007 Boeing. All rights reserved.
 Copyright 2009, Inc. All rights reserved. Global Navigation and Communication Solutions We pioneer advanced positioning, navigation, timing, and communication (PNT+C) solutions for government and civilian
Copyright 2009, Inc. All rights reserved. Global Navigation and Communication Solutions We pioneer advanced positioning, navigation, timing, and communication (PNT+C) solutions for government and civilian
Simulation Analysis for Performance Improvements of GNSS-based Positioning in a Road Environment
 Simulation Analysis for Performance Improvements of GNSS-based Positioning in a Road Environment Nam-Hyeok Kim, Chi-Ho Park IT Convergence Division DGIST Daegu, S. Korea {nhkim, chpark}@dgist.ac.kr Soon
Simulation Analysis for Performance Improvements of GNSS-based Positioning in a Road Environment Nam-Hyeok Kim, Chi-Ho Park IT Convergence Division DGIST Daegu, S. Korea {nhkim, chpark}@dgist.ac.kr Soon
Orion-S GPS Receiver Software Validation
 Space Flight Technology, German Space Operations Center (GSOC) Deutsches Zentrum für Luft- und Raumfahrt (DLR) e.v. O. Montenbruck Doc. No. : GTN-TST-11 Version : 1.1 Date : July 9, 23 Document Title:
Space Flight Technology, German Space Operations Center (GSOC) Deutsches Zentrum für Luft- und Raumfahrt (DLR) e.v. O. Montenbruck Doc. No. : GTN-TST-11 Version : 1.1 Date : July 9, 23 Document Title:
ADVANCED GNSS ALGORITHMS FOR SAFE AUTONOMOUS VEHICLES
 ION GNSS+ 2017 ADVANCED GNSS ALGORITHMS FOR SAFE AUTONOMOUS VEHICLES SEPTEMBER 29 TH, 2017 ION GNSS+ 2017, PORTLAND, OREGON, USA SESSION A5: Autonomous and Assisted Vehicle Applications Property of GMV
ION GNSS+ 2017 ADVANCED GNSS ALGORITHMS FOR SAFE AUTONOMOUS VEHICLES SEPTEMBER 29 TH, 2017 ION GNSS+ 2017, PORTLAND, OREGON, USA SESSION A5: Autonomous and Assisted Vehicle Applications Property of GMV
FieldGenius Technical Notes GPS Terminology
 FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
Precise Positioning with NovAtel CORRECT Including Performance Analysis
 Precise Positioning with NovAtel CORRECT Including Performance Analysis NovAtel White Paper April 2015 Overview This article provides an overview of the challenges and techniques of precise GNSS positioning.
Precise Positioning with NovAtel CORRECT Including Performance Analysis NovAtel White Paper April 2015 Overview This article provides an overview of the challenges and techniques of precise GNSS positioning.
Dynamic Two-Way Time Transfer to Moving Platforms W H I T E PA P E R
 Dynamic Two-Way Time Transfer to Moving Platforms WHITE PAPER Dynamic Two-Way Time Transfer to Moving Platforms Tom Celano, Symmetricom 1Lt. Richard Beckman, USAF-AFRL Jeremy Warriner, Symmetricom Scott
Dynamic Two-Way Time Transfer to Moving Platforms WHITE PAPER Dynamic Two-Way Time Transfer to Moving Platforms Tom Celano, Symmetricom 1Lt. Richard Beckman, USAF-AFRL Jeremy Warriner, Symmetricom Scott
Surveying in the Year 2020
 Surveying in the Year 2020 Johannes Schwarz Leica Geosystems My first toys 2 1 3 Questions Why is a company like Leica Geosystems constantly developing new surveying products and instruments? What surveying
Surveying in the Year 2020 Johannes Schwarz Leica Geosystems My first toys 2 1 3 Questions Why is a company like Leica Geosystems constantly developing new surveying products and instruments? What surveying
ABSTRACT: Three types of portable units with GNSS raw data recording capability are assessed to determine static and kinematic position accuracy
 ABSTRACT: Three types of portable units with GNSS raw data recording capability are assessed to determine static and kinematic position accuracy under various environments using alternatively their internal
ABSTRACT: Three types of portable units with GNSS raw data recording capability are assessed to determine static and kinematic position accuracy under various environments using alternatively their internal
HIGH GAIN ADVANCED GPS RECEIVER
 ABSTRACT HIGH GAIN ADVANCED GPS RECEIVER NAVSYS High Gain Advanced () uses a digital beam-steering antenna array to enable up to eight GPS satellites to be tracked, each with up to dbi of additional antenna
ABSTRACT HIGH GAIN ADVANCED GPS RECEIVER NAVSYS High Gain Advanced () uses a digital beam-steering antenna array to enable up to eight GPS satellites to be tracked, each with up to dbi of additional antenna
Reliability Estimation for RTK-GNSS/IMU/Vehicle Speed Sensors in Urban Environment
 Laboratory of Satellite Navigation Engineering Reliability Estimation for RTK-GNSS/IMU/Vehicle Speed Sensors in Urban Environment Ren Kikuchi, Nobuaki Kubo (TUMSAT) Shigeki Kawai, Ichiro Kato, Nobuyuki
Laboratory of Satellite Navigation Engineering Reliability Estimation for RTK-GNSS/IMU/Vehicle Speed Sensors in Urban Environment Ren Kikuchi, Nobuaki Kubo (TUMSAT) Shigeki Kawai, Ichiro Kato, Nobuyuki
One Source for Positioning Success
 novatel.com One Source for Positioning Success RTK, PPP, SBAS OR DGNSS. NOVATEL CORRECT OPTIMIZES ALL CORRECTION SOURCES, PUTTING MORE POWER, FLEXIBILITY AND CONTROL IN YOUR HANDS. NovAtel CORRECT is the
novatel.com One Source for Positioning Success RTK, PPP, SBAS OR DGNSS. NOVATEL CORRECT OPTIMIZES ALL CORRECTION SOURCES, PUTTING MORE POWER, FLEXIBILITY AND CONTROL IN YOUR HANDS. NovAtel CORRECT is the
TEST RESULTS OF A HIGH GAIN ADVANCED GPS RECEIVER
 TEST RESULTS OF A HIGH GAIN ADVANCED GPS RECEIVER ABSTRACT Dr. Alison Brown, Randy Silva, Gengsheng Zhang,; NAVSYS Corporation. NAVSYS High Gain Advanced GPS Receiver () uses a digital beam-steering antenna
TEST RESULTS OF A HIGH GAIN ADVANCED GPS RECEIVER ABSTRACT Dr. Alison Brown, Randy Silva, Gengsheng Zhang,; NAVSYS Corporation. NAVSYS High Gain Advanced GPS Receiver () uses a digital beam-steering antenna
Lecture: Allows operation in enviroment without prior knowledge
 Lecture: SLAM Lecture: Is it possible for an autonomous vehicle to start at an unknown environment and then to incrementally build a map of this enviroment while simulaneous using this map for vehicle
Lecture: SLAM Lecture: Is it possible for an autonomous vehicle to start at an unknown environment and then to incrementally build a map of this enviroment while simulaneous using this map for vehicle
GPS Signal Degradation Analysis Using a Simulator
 GPS Signal Degradation Analysis Using a Simulator G. MacGougan, G. Lachapelle, M.E. Cannon, G. Jee Department of Geomatics Engineering, University of Calgary M. Vinnins, Defence Research Establishment
GPS Signal Degradation Analysis Using a Simulator G. MacGougan, G. Lachapelle, M.E. Cannon, G. Jee Department of Geomatics Engineering, University of Calgary M. Vinnins, Defence Research Establishment
3D-Map Aided Multipath Mitigation for Urban GNSS Positioning
 Summer School on GNSS 2014 Student Scholarship Award Workshop August 2, 2014 3D-Map Aided Multipath Mitigation for Urban GNSS Positioning I-Wen Chu National Cheng Kung University, Taiwan. Page 1 Outline
Summer School on GNSS 2014 Student Scholarship Award Workshop August 2, 2014 3D-Map Aided Multipath Mitigation for Urban GNSS Positioning I-Wen Chu National Cheng Kung University, Taiwan. Page 1 Outline
Utilizing Batch Processing for GNSS Signal Tracking
 Utilizing Batch Processing for GNSS Signal Tracking Andrey Soloviev Avionics Engineering Center, Ohio University Presented to: ION Alberta Section, Calgary, Canada February 27, 2007 Motivation: Outline
Utilizing Batch Processing for GNSS Signal Tracking Andrey Soloviev Avionics Engineering Center, Ohio University Presented to: ION Alberta Section, Calgary, Canada February 27, 2007 Motivation: Outline
Autonomous Fault Detection with Carrier-Phase DGPS for Shipboard Landing Navigation
 Autonomous Fault Detection with Carrier-Phase DGPS for Shipboard Landing Navigation MOON-BEOM HEO and BORIS PERVAN Illinois Institute of Technology, Chicago, Illinois SAM PULLEN, JENNIFER GAUTIER, and
Autonomous Fault Detection with Carrier-Phase DGPS for Shipboard Landing Navigation MOON-BEOM HEO and BORIS PERVAN Illinois Institute of Technology, Chicago, Illinois SAM PULLEN, JENNIFER GAUTIER, and
GNSS for Landing Systems and Carrier Smoothing Techniques Christoph Günther, Patrick Henkel
 GNSS for Landing Systems and Carrier Smoothing Techniques Christoph Günther, Patrick Henkel Institute of Communications and Navigation Page 1 Instrument Landing System workhorse for all CAT-I III approach
GNSS for Landing Systems and Carrier Smoothing Techniques Christoph Günther, Patrick Henkel Institute of Communications and Navigation Page 1 Instrument Landing System workhorse for all CAT-I III approach
A Hybrid Indoor Tracking System for First Responders
 A Hybrid Indoor Tracking System for First Responders Precision Indoor Personnel Location and Tracking for Emergency Responders Technology Workshop August 4, 2009 Marc Harlacher Director, Location Solutions
A Hybrid Indoor Tracking System for First Responders Precision Indoor Personnel Location and Tracking for Emergency Responders Technology Workshop August 4, 2009 Marc Harlacher Director, Location Solutions
Trimble Business Center:
 Trimble Business Center: Modernized Approaches for GNSS Baseline Processing Trimble s industry-leading software includes a new dedicated processor for static baselines. The software features dynamic selection
Trimble Business Center: Modernized Approaches for GNSS Baseline Processing Trimble s industry-leading software includes a new dedicated processor for static baselines. The software features dynamic selection
Multisystem Real Time Precise-Point-Positioning, today with GPS+GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS
 2 International Symposium on /GNSS October 26-28, 2. Multisystem Real Time Precise-Point-Positioning, today with +GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS Álvaro Mozo García,
2 International Symposium on /GNSS October 26-28, 2. Multisystem Real Time Precise-Point-Positioning, today with +GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS Álvaro Mozo García,
Galileo: The Added Value for Integrity in Harsh Environments
 sensors Article Galileo: The Added Value for Integrity in Harsh Environments Daniele Borio, and Ciro Gioia 2, Received: 8 November 25; Accepted: 3 January 26; Published: 6 January 26 Academic Editor: Ha
sensors Article Galileo: The Added Value for Integrity in Harsh Environments Daniele Borio, and Ciro Gioia 2, Received: 8 November 25; Accepted: 3 January 26; Published: 6 January 26 Academic Editor: Ha
Locata: A New Constellation for High Accuracy Outdoor & Indoor Positioning
 Locata: A New Constellation for High Accuracy Outdoor & Indoor Positioning Chris Rizos, Yong Li, Nonie Politi School of Surveying & Spatial Information Systems University of New South Wales, Sydney, Australia
Locata: A New Constellation for High Accuracy Outdoor & Indoor Positioning Chris Rizos, Yong Li, Nonie Politi School of Surveying & Spatial Information Systems University of New South Wales, Sydney, Australia
Global Positioning System: what it is and how we use it for measuring the earth s movement. May 5, 2009
 Global Positioning System: what it is and how we use it for measuring the earth s movement. May 5, 2009 References Lectures from K. Larson s Introduction to GNSS http://www.colorado.edu/engineering/asen/
Global Positioning System: what it is and how we use it for measuring the earth s movement. May 5, 2009 References Lectures from K. Larson s Introduction to GNSS http://www.colorado.edu/engineering/asen/
KOMPSAT-2 Orbit Determination using GPS SIgnals
 Presented at GNSS 2004 The 2004 International Symposium on GNSS/GPS Sydney, Australia 6 8 December 2004 KOMPSAT-2 Orbit Determination using GPS SIgnals Dae-Won Chung KOMPSAT Systems Engineering and Integration
Presented at GNSS 2004 The 2004 International Symposium on GNSS/GPS Sydney, Australia 6 8 December 2004 KOMPSAT-2 Orbit Determination using GPS SIgnals Dae-Won Chung KOMPSAT Systems Engineering and Integration
Measurement Level Integration of Multiple Low-Cost GPS Receivers for UAVs
 Measurement Level Integration of Multiple Low-Cost GPS Receivers for UAVs Akshay Shetty and Grace Xingxin Gao University of Illinois at Urbana-Champaign BIOGRAPHY Akshay Shetty is a graduate student in
Measurement Level Integration of Multiple Low-Cost GPS Receivers for UAVs Akshay Shetty and Grace Xingxin Gao University of Illinois at Urbana-Champaign BIOGRAPHY Akshay Shetty is a graduate student in
Satellite and Inertial Attitude. A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu
 Satellite and Inertial Attitude and Positioning System A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu Outline Project Introduction Theoretical Background Inertial
Satellite and Inertial Attitude and Positioning System A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu Outline Project Introduction Theoretical Background Inertial
REAL-TIME GPS ATTITUDE DETERMINATION SYSTEM BASED ON EPOCH-BY-EPOCH TECHNOLOGY
 REAL-TIME GPS ATTITUDE DETERMINATION SYSTEM BASED ON EPOCH-BY-EPOCH TECHNOLOGY Dr. Yehuda Bock 1, Thomas J. Macdonald 2, John H. Merts 3, William H. Spires III 3, Dr. Lydia Bock 1, Dr. Jeffrey A. Fayman
REAL-TIME GPS ATTITUDE DETERMINATION SYSTEM BASED ON EPOCH-BY-EPOCH TECHNOLOGY Dr. Yehuda Bock 1, Thomas J. Macdonald 2, John H. Merts 3, William H. Spires III 3, Dr. Lydia Bock 1, Dr. Jeffrey A. Fayman
Mobile Positioning in Wireless Mobile Networks
 Mobile Positioning in Wireless Mobile Networks Peter Brída Department of Telecommunications and Multimedia Faculty of Electrical Engineering University of Žilina SLOVAKIA Outline Why Mobile Positioning?
Mobile Positioning in Wireless Mobile Networks Peter Brída Department of Telecommunications and Multimedia Faculty of Electrical Engineering University of Žilina SLOVAKIA Outline Why Mobile Positioning?
High Precision GNSS in Automotive
 High Precision GNSS in Automotive Jonathan Auld, VP Engineering and Safety 6, March, 2018 2 Global OEM Positioning Solutions and Services for Land, Sea, and Air. GNSS in Automotive Today Today the primary
High Precision GNSS in Automotive Jonathan Auld, VP Engineering and Safety 6, March, 2018 2 Global OEM Positioning Solutions and Services for Land, Sea, and Air. GNSS in Automotive Today Today the primary
It is well known that GNSS signals
 GNSS Solutions: Multipath vs. NLOS signals GNSS Solutions is a regular column featuring questions and answers about technical aspects of GNSS. Readers are invited to send their questions to the columnist,
GNSS Solutions: Multipath vs. NLOS signals GNSS Solutions is a regular column featuring questions and answers about technical aspects of GNSS. Readers are invited to send their questions to the columnist,
Several ground-based augmentation system (GBAS) Galileo E1 and E5a Performance
 Galileo E1 and E5a Performance") » COVER STORY Galileo E1 and E5a Performance For Multi-Frequency, Multi-Constellation GBAS Analysis of new Galileo signals at an experimental ground-based augmentation system (GBAS) compares noise and
» COVER STORY Galileo E1 and E5a Performance For Multi-Frequency, Multi-Constellation GBAS Analysis of new Galileo signals at an experimental ground-based augmentation system (GBAS) compares noise and
Demonstration of Decimeter-level Real-time Positioning of an Airborne Platform
 Demonstration of Decimeter-level Real-time Positioning of an Airborne Platform M. Armatys, R. Muellerschoen, Y. Bar-Sever, R. Meyer JPL, California Institute of Technology ION NTM 2003 22-24 Jan 2003 Outline
Demonstration of Decimeter-level Real-time Positioning of an Airborne Platform M. Armatys, R. Muellerschoen, Y. Bar-Sever, R. Meyer JPL, California Institute of Technology ION NTM 2003 22-24 Jan 2003 Outline
Table of Contents. Frequently Used Abbreviation... xvii
 GPS Satellite Surveying, 2 nd Edition Alfred Leick Department of Surveying Engineering, University of Maine John Wiley & Sons, Inc. 1995 (Navtech order #1028) Table of Contents Preface... xiii Frequently
GPS Satellite Surveying, 2 nd Edition Alfred Leick Department of Surveying Engineering, University of Maine John Wiley & Sons, Inc. 1995 (Navtech order #1028) Table of Contents Preface... xiii Frequently
EXPERIMENTAL RESULTS OF LEX CORRECTIONS USING FARMING MACHINE
 Sixth Meeting of the International Committee on Global Navigation Satellite Systems (ICG) EXPERIMENTAL RESULTS OF LEX CORRECTIONS USING FARMING MACHINE Masayuki Kanzaki Hitachi Zosen Corporation Prof.
Sixth Meeting of the International Committee on Global Navigation Satellite Systems (ICG) EXPERIMENTAL RESULTS OF LEX CORRECTIONS USING FARMING MACHINE Masayuki Kanzaki Hitachi Zosen Corporation Prof.
The Global Positioning System
 The Global Positioning System 5-1 US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites
The Global Positioning System 5-1 US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites
Fundamentals of Global Positioning System Receivers
 Fundamentals of Global Positioning System Receivers A Software Approach SECOND EDITION JAMES BAO-YEN TSUI A JOHN WILEY & SONS, INC., PUBLICATION Fundamentals of Global Positioning System Receivers Fundamentals
Fundamentals of Global Positioning System Receivers A Software Approach SECOND EDITION JAMES BAO-YEN TSUI A JOHN WILEY & SONS, INC., PUBLICATION Fundamentals of Global Positioning System Receivers Fundamentals
Cooperative navigation (part II)
") Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative localization (part I) Jouni Rantakokko
 Jouni Rantakokko") Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Fundamentals of GPS Navigation
 Fundamentals of GPS Navigation Kiril Alexiev 1 /76 2 /76 At the traditional January media briefing in Paris (January 18, 2017), European Space Agency (ESA) General Director Jan Woerner explained the knowns
Fundamentals of GPS Navigation Kiril Alexiev 1 /76 2 /76 At the traditional January media briefing in Paris (January 18, 2017), European Space Agency (ESA) General Director Jan Woerner explained the knowns
REAL-TIME ESTIMATION OF IONOSPHERIC DELAY USING DUAL FREQUENCY GPS OBSERVATIONS
 European Scientific Journal May 03 edition vol.9, o.5 ISS: 857 788 (Print e - ISS 857-743 REAL-TIME ESTIMATIO OF IOOSPHERIC DELAY USIG DUAL FREQUECY GPS OBSERVATIOS Dhiraj Sunehra, M.Tech., PhD Jawaharlal
European Scientific Journal May 03 edition vol.9, o.5 ISS: 857 788 (Print e - ISS 857-743 REAL-TIME ESTIMATIO OF IOOSPHERIC DELAY USIG DUAL FREQUECY GPS OBSERVATIOS Dhiraj Sunehra, M.Tech., PhD Jawaharlal
CHAPTER 2 GPS GEODESY. Estelar. The science of geodesy is concerned with the earth by quantitatively
 CHAPTER 2 GPS GEODESY 2.1. INTRODUCTION The science of geodesy is concerned with the earth by quantitatively describing the coordinates of each point on the surface in a global or local coordinate system.
CHAPTER 2 GPS GEODESY 2.1. INTRODUCTION The science of geodesy is concerned with the earth by quantitatively describing the coordinates of each point on the surface in a global or local coordinate system.
Global Correction Services for GNSS
 Global Correction Services for GNSS Hemisphere GNSS Whitepaper September 5, 2015 Overview Since the early days of GPS, new industries emerged while existing industries evolved to use position data in real-time.
Global Correction Services for GNSS Hemisphere GNSS Whitepaper September 5, 2015 Overview Since the early days of GPS, new industries emerged while existing industries evolved to use position data in real-time.
Asian Journal of Science and Technology Vol. 08, Issue, 11, pp , November, 2017 RESEARCH ARTICLE
 Available Online at http://www.journalajst.com ASIAN JOURNAL OF SCIENCE AND TECHNOLOGY ISSN: 0976-3376 Asian Journal of Science and Technology Vol. 08, Issue, 11, pp.6697-6703, November, 2017 ARTICLE INFO
Available Online at http://www.journalajst.com ASIAN JOURNAL OF SCIENCE AND TECHNOLOGY ISSN: 0976-3376 Asian Journal of Science and Technology Vol. 08, Issue, 11, pp.6697-6703, November, 2017 ARTICLE INFO
NovAtel s. Performance Analysis October Abstract. SPAN on OEM6. SPAN on OEM6. Enhancements
 NovAtel s SPAN on OEM6 Performance Analysis October 2012 Abstract SPAN, NovAtel s GNSS/INS solution, is now available on the OEM6 receiver platform. In addition to rapid GNSS signal reacquisition performance,
NovAtel s SPAN on OEM6 Performance Analysis October 2012 Abstract SPAN, NovAtel s GNSS/INS solution, is now available on the OEM6 receiver platform. In addition to rapid GNSS signal reacquisition performance,
Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity
 Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity Zak M. Kassas Autonomous Systems Perception, Intelligence, and Navigation (ASPIN) Laboratory University of California, Riverside
Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity Zak M. Kassas Autonomous Systems Perception, Intelligence, and Navigation (ASPIN) Laboratory University of California, Riverside
GPS Milestones, cont. GPS Milestones. The Global Positioning Sytem, Part 1 10/10/2017. M. Helper, GEO 327G/386G, UT Austin 1. US GPS Facts of Note
 The Global Positioning System US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites (SVs)
The Global Positioning System US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites (SVs)
Satellite Navigation Integrity and integer ambiguity resolution
 Satellite Navigation Integrity and integer ambiguity resolution Picture: ESA AE4E08 Sandra Verhagen Course 2010 2011, lecture 12 1 Today s topics Integrity and RAIM Integer Ambiguity Resolution Study Section
Satellite Navigation Integrity and integer ambiguity resolution Picture: ESA AE4E08 Sandra Verhagen Course 2010 2011, lecture 12 1 Today s topics Integrity and RAIM Integer Ambiguity Resolution Study Section
GEO 428: DEMs from GPS, Imagery, & Lidar Tuesday, September 11
 GEO 428: DEMs from GPS, Imagery, & Lidar Tuesday, September 11 Global Positioning Systems GPS is a technology that provides Location coordinates Elevation For any location with a decent view of the sky
GEO 428: DEMs from GPS, Imagery, & Lidar Tuesday, September 11 Global Positioning Systems GPS is a technology that provides Location coordinates Elevation For any location with a decent view of the sky
Introduction to Advanced RAIM. Juan Blanch, Stanford University July 26, 2016
 Introduction to Advanced RAIM Juan Blanch, Stanford University July 26, 2016 Satellite-based Augmentation Systems Credit: Todd Walter Receiver Autonomous Integrity Monitoring (556 m Horizontal Error Bound)
Introduction to Advanced RAIM Juan Blanch, Stanford University July 26, 2016 Satellite-based Augmentation Systems Credit: Todd Walter Receiver Autonomous Integrity Monitoring (556 m Horizontal Error Bound)
ENGI 3703 Surveying and Geomatics
 Satellite Geometry: Satellites well spread out in the sky have a much stronger solution to the resection type problem (aka trilateration) then satellite that are grouped together. Since the position of
Satellite Geometry: Satellites well spread out in the sky have a much stronger solution to the resection type problem (aka trilateration) then satellite that are grouped together. Since the position of
WLAN Location Methods
 S-7.333 Postgraduate Course in Radio Communications 7.4.004 WLAN Location Methods Heikki Laitinen heikki.laitinen@hut.fi Contents Overview of Radiolocation Radiolocation in IEEE 80.11 Signal strength based
S-7.333 Postgraduate Course in Radio Communications 7.4.004 WLAN Location Methods Heikki Laitinen heikki.laitinen@hut.fi Contents Overview of Radiolocation Radiolocation in IEEE 80.11 Signal strength based
TEST YOUR SATELLITE NAVIGATION PERFORMANCE ON YOUR ANDROID DEVICE GLOSSARY
 TEST YOUR SATELLITE NAVIGATION PERFORMANCE ON YOUR ANDROID DEVICE GLOSSARY THE GLOSSARY This glossary aims to clarify and explain the acronyms used in GNSS and satellite navigation performance testing
TEST YOUR SATELLITE NAVIGATION PERFORMANCE ON YOUR ANDROID DEVICE GLOSSARY THE GLOSSARY This glossary aims to clarify and explain the acronyms used in GNSS and satellite navigation performance testing
An Introduction to GPS
 An Introduction to GPS You are here The GPS system: what is GPS Principles of GPS: how does it work Processing of GPS: getting precise results Yellowstone deformation: an example What is GPS? System to
An Introduction to GPS You are here The GPS system: what is GPS Principles of GPS: how does it work Processing of GPS: getting precise results Yellowstone deformation: an example What is GPS? System to
Global Navigation Satellite Systems (GNSS)Part I EE 570: Location and Navigation
Part I EE 570: Location and Navigation") Lecture Global Navigation Satellite Systems (GNSS)Part I EE 570: Location and Navigation Lecture Notes Update on April 25, 2016 Aly El-Osery and Kevin Wedeward, Electrical Engineering Dept., New Mexico
Lecture Global Navigation Satellite Systems (GNSS)Part I EE 570: Location and Navigation Lecture Notes Update on April 25, 2016 Aly El-Osery and Kevin Wedeward, Electrical Engineering Dept., New Mexico
5G positioning and hybridization with GNSS observations
 5G positioning and hybridization with GNSS observations 1. Introduction Abstract The paradigm of ubiquitous location information has risen a requirement for hybrid positioning methods, as a continuous
5G positioning and hybridization with GNSS observations 1. Introduction Abstract The paradigm of ubiquitous location information has risen a requirement for hybrid positioning methods, as a continuous
GNSS Signal Structures
 GNSS Signal Structures Tom Stansell Stansell Consulting Tom@Stansell.com Bangkok, Thailand 23 January 2018 S t a n s e l l C o n s u l t i n g RL Introduction It s a pleasure to speak with you this morning.
GNSS Signal Structures Tom Stansell Stansell Consulting Tom@Stansell.com Bangkok, Thailand 23 January 2018 S t a n s e l l C o n s u l t i n g RL Introduction It s a pleasure to speak with you this morning.
Global Navigation Satellite System (GNSS) for Disaster Mitigation
 for Disaster Mitigation") Global Navigation Satellite System (GNSS) for Disaster Mitigation By Chathura H. Wickramasinghe Geoinformatics Center Asian Institute of Technology Establish in 1959 as a Post Graduate School Catering
Global Navigation Satellite System (GNSS) for Disaster Mitigation By Chathura H. Wickramasinghe Geoinformatics Center Asian Institute of Technology Establish in 1959 as a Post Graduate School Catering
Positioning with Single and Dual Frequency Smartphones Running Android 7 or Later
 Positioning with Single and Dual Frequency Smartphones Running Android 7 or Later * René Warnant, *Laura Van De Vyvere, + Quentin Warnant * University of Liege Geodesy and GNSS + Augmenteo, Plaine Image,
Positioning with Single and Dual Frequency Smartphones Running Android 7 or Later * René Warnant, *Laura Van De Vyvere, + Quentin Warnant * University of Liege Geodesy and GNSS + Augmenteo, Plaine Image,
Validation of Multiple Hypothesis RAIM Algorithm Using Dual-frequency GNSS Signals
 Validation of Multiple Hypothesis RAIM Algorithm Using Dual-frequency GNSS Signals Alexandru Ene, Juan Blanch, Todd Walter, J. David Powell Stanford University, Stanford CA, USA BIOGRAPHY Alexandru Ene
Validation of Multiple Hypothesis RAIM Algorithm Using Dual-frequency GNSS Signals Alexandru Ene, Juan Blanch, Todd Walter, J. David Powell Stanford University, Stanford CA, USA BIOGRAPHY Alexandru Ene
12th International Conference on Information Fusion Seattle, WA, USA, July 6-9, ISIF 126
 12th International Conference on Information Fusion Seattle, WA, USA, July 6-9, 2009 978-0-9824438-0-4 2009 ISIF 126 with x s denoting the known satellite position. ρ e shall be used to model the errors
12th International Conference on Information Fusion Seattle, WA, USA, July 6-9, 2009 978-0-9824438-0-4 2009 ISIF 126 with x s denoting the known satellite position. ρ e shall be used to model the errors
Understanding GPS: Principles and Applications Second Edition
 Understanding GPS: Principles and Applications Second Edition Elliott Kaplan and Christopher Hegarty ISBN 1-58053-894-0 Approx. 680 pages Navtech Part #1024 This thoroughly updated second edition of an
Understanding GPS: Principles and Applications Second Edition Elliott Kaplan and Christopher Hegarty ISBN 1-58053-894-0 Approx. 680 pages Navtech Part #1024 This thoroughly updated second edition of an
Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization
 Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Errors in GPS. Errors in GPS. Geodetic Co-ordinate system. R. Khosla Fall Semester
 Errors in GPS Errors in GPS GPS is currently the most accurate positioning system available globally. Although we are talking about extreme precision and measuring distances by speed of light, yet there
Errors in GPS Errors in GPS GPS is currently the most accurate positioning system available globally. Although we are talking about extreme precision and measuring distances by speed of light, yet there
A Survey on SQM for Sat-Nav Systems
 A Survey on SQM for Sat-Nav Systems Sudarshan Bharadwaj DS Department of ECE, Cambridge Institute of Technology, Bangalore Abstract: Reduction of multipath effects on the satellite signals can be accomplished
A Survey on SQM for Sat-Nav Systems Sudarshan Bharadwaj DS Department of ECE, Cambridge Institute of Technology, Bangalore Abstract: Reduction of multipath effects on the satellite signals can be accomplished
Introduction to DGNSS
 Introduction to DGNSS Jaume Sanz Subirana J. Miguel Juan Zornoza Research group of Astronomy & Geomatics (gage) Technical University of Catalunya (UPC), Spain. Web site: http://www.gage.upc.edu Hanoi,
Introduction to DGNSS Jaume Sanz Subirana J. Miguel Juan Zornoza Research group of Astronomy & Geomatics (gage) Technical University of Catalunya (UPC), Spain. Web site: http://www.gage.upc.edu Hanoi,
MINIMIZING SELECTIVE AVAILABILITY ERROR ON TOPEX GPS MEASUREMENTS. S. C. Wu*, W. I. Bertiger and J. T. Wu
 MINIMIZING SELECTIVE AVAILABILITY ERROR ON TOPEX GPS MEASUREMENTS S. C. Wu*, W. I. Bertiger and J. T. Wu Jet Propulsion Laboratory California Institute of Technology Pasadena, California 9119 Abstract*
MINIMIZING SELECTIVE AVAILABILITY ERROR ON TOPEX GPS MEASUREMENTS S. C. Wu*, W. I. Bertiger and J. T. Wu Jet Propulsion Laboratory California Institute of Technology Pasadena, California 9119 Abstract*
The Possibility of Precise Automobile Navigation using GPS/QZS L5 and (Galileo E5) Pseudo ranges
 Pseudo ranges") The Possibility of Precise Automobile Navigation using GPS/QZS L5 and (Galileo E5 Pseudo ranges ION ITM ITM 013 Hiroko Tokura, Taro Suzuki, Tomoji Takasu, Nobuaki Kubo (Tokyo University of Marine Scienceand
The Possibility of Precise Automobile Navigation using GPS/QZS L5 and (Galileo E5 Pseudo ranges ION ITM ITM 013 Hiroko Tokura, Taro Suzuki, Tomoji Takasu, Nobuaki Kubo (Tokyo University of Marine Scienceand