Robust Position and Velocity Estimation Methods in Integrated Navigation Systems for Inland Water Applications
|
|
|
- Agnes Sullivan
- 5 years ago
- Views:
Transcription
 IEEE/ION PLANS 2016 Integrated Inertial Navigation 13.")
1 Robust Position and Velocity Estimation Methods in Integrated Navigation Systems for Inland Water Applications D. Arias-Medina, M. Romanovas, I. Herrera-Pinzón, R. Ziebold German Aerospace Centre (DLR) IEEE/ION PLANS 2016 Integrated Inertial Navigation 13. April 2016

2 P. 1/23 Agenda Introduction Motivation Objectives Methods Robust Estimation Sensor Fusion Tests and Results Summary and Outlook source:
3 P. 1/23 Agenda Introduction Motivation Objectives Methods Robust Estimation Sensor Fusion Tests and Results Summary and Outlook source:
4 Motivation P. 2/23 Maritime transport is the backbone of international trade and the global economy: ~80% global trade by volume is made by sea Around 400 Mio. passengers move through European ports each year Nautical Transport Systems are essential for the global economic development, competitiveness and prosperity Unfortunately The number of shipping accidents is not decaying over the years





5 Motivation P. 3/23 source: source: source: source:

6 Motivation P. 4/23 Kiel Canal: world busiest artificial waterway Collision of two medium-sized vessels at night Positioning systems on both vessels showed a safe passing-distance RADAR was not used Global Navigation Satellite Systems (GNSS) are the cornerstone and main information supplier for Positioning, Navigation and Timing (PNT) in maritime systems.

7 Motivation P. 5/23 The performance of satellite based navigation can be easily disturbed due to space weather events, jamming, reflection of the signals, Classical positioning is solved applying a Least Squares (LS) method single contaminated signal induce large errors in the position Receiver Autonomous Integrity Monitoring (RAIM) is the standard for GNSS fault detection but it cannot handle multiple simultaneous faults! source: Satellite based navigation lacks robustness: capability of a system to continue operating despite abnormalities
8 Objectives P. 6/23 What do we want? Provide a reliable navigation solution mitigating GNSS faulty signals What is the problem? Multiple simultaneous faulty signals, specially in urban canyons or waterways Standard RAIM is not sufficient What is our solution? Implementation of robust estimators for the positioning problem Integration of these algorithms within an inertial + satellite based navigation
9 P. 7/23 Agenda Introduction Motivation Objectives Methods Robust Estimation Sensor Fusion Tests and Results Summary and Outlook source:
10 P. 8/23 Robust Estimation GNSS positioning problems are generally solved LS estimator In a LS, it is assumed that the noises are Gaussian But this is often not the case! Clue definitions Outliers observations that appear unusually large or small and out of place Breakdown Point ε smallest percentage of contaminated data that can cause the estimator to take arbitrarily large values Gaussian Efficiency similarity of a method to classical LS under Gaussian conditions
11 P. 9/23 Robust Estimation Overpassing the limitations of LS for regression has concerned mathematicians and engineers for years Iteratively Reweighted Least Squares (IRLS) Full set approach M estimator n all observations are used to compute min a solution, ρ r i, observations ε = 0 with large residuals are σdownweighted Appealing GM implementation estimator for its similarity to regular LS n min Gaussian efficient i=1 i=1 w(x i )ρ S estimator Breakdown point ε not very high min s r 1,, r n, r i w x i σ, ε = 1 n + 1 ε = ( n p + 2)/n 2 Best Subset Selection Bottom up approach from n n observations, p subsets are made Least Median of Squares (LMS) min med r i, ε = 0.5 The solution is checked using the observations not taking part in the solution Least Trimmed of Squares (LTS) h The best subset is 2 the one to min r minimize/maximize i:n, ε the cost = 0.5 function i=1 Breakdown point ε up to 50% Low Gaussian efficiency There are also other approaches Receiver Autonomous Integrity Monitoring (RAIM)
 in a statistically consistent way Kalman Filter (KF) is valid for linear problems Extended & Unscented KF (UKF,")
12 P. 10/23 Kalman Filtering for Sensor Fusion Standard approach for multi-sensor fusion and navigation Incorporate of all the available information (uncertainties, noise statistics, dynamical models, kinematic constraints) in a statistically consistent way Kalman Filter (KF) is valid for linear problems Extended & Unscented KF (UKF, EKF)



13 P. 11/23 UKF for IMU/GNSS Navigation The state is represented by a set of sigma points propagated through the nonlinear functions The mean and covariance of the solution are reconstructed back from the sigma points Attention: this is not a Monte Carlo method! Sensor biases corrections IMU Acceleration and angular rate UKF Prediction Step Predicted state and variances Tightly coupled Loosely coupled GNSS receiver UKF Correction Step Position, Velocity, Attitude and their uncertainty
14 P. 12/23 Agenda Introduction Motivation Objectives Methods Robust Estimation Sensor Fusion Tests and Results Summary and Outlook source:

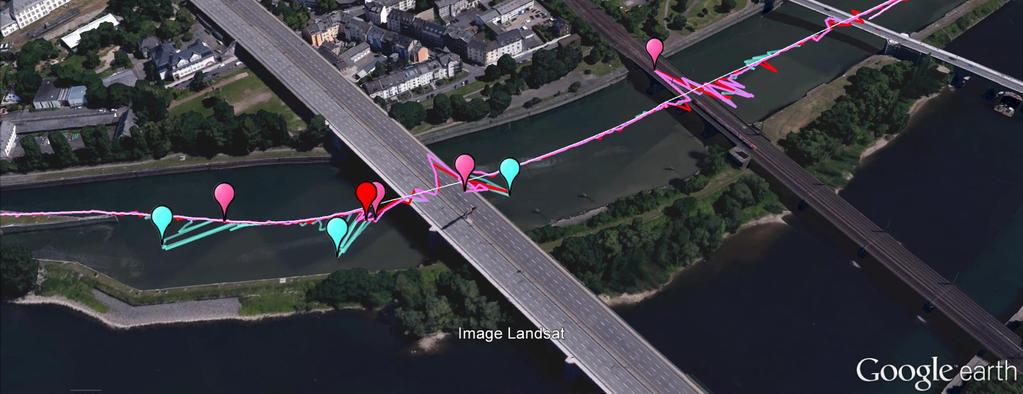
15 P. 13/23 Experiment Setup The test scenario is the Moselle River in Koblenz (Germany) Vessel MS BINGEN performed 8 shaped trajectory passing under the bridges Equipment of vessel: 3x GNSS antennas, update rate 1 Hz 1x inertial sensors: gyroscope and accelerometer, update rate 200 Hz

16 Moselle River Scenario P. 14/23

17 Robust Method Comparison P. 15/23

18 P. 16/23 Discussion on Robust Estimation Robust techniques perform better than regular Single Point Positioning (SPP) The mean error is reduced and the maximum error is 15 m smaller LMS and S estimator have a similar performance but LMS requires higher computation LMS has a low Gaussian efficiency
19 Introduction Methods Test and Results Conclusion P. 17/29 23 UKF Performance Comparison of the different UKF designs: Tightly Coupled UKF Loosely Coupled UKF + a) classical LS b) robust scheme

20 P. 18/23 UKF Performance Discussion Kalman filtering provides a smooth position solution largest errors are eliminated The inclusion of robust estimator significant improvement in the position error
21 P. 19/23 Agenda Introduction Motivation Objectives Methods Robust Estimation Sensor Fusion Tests and Results Summary and Outlook source:
22 P. 20/23 Conclusions Review on the techniques for GNSS fault mitigation Integrated navigation fusing IMU+GNSS sensors using UKF Evaluation of the algorithms using real data Promising performance improvement vs. classical LS Great benefits of the use of robust schemes + KF
23 P. 21/23 Future Work Extension to Multi antenna, Multi constellation, Multi frequency (MMM) Robust schemes lack any kind of integrity monitoring user gets warned if position estimation is not reliable Implementation of the robust estimation in the tightly coupled UKF

24 Thanks for your Attention Thanks for your Attention More information: More information:
Robust Positioning Provision of Safe Navigation at Sea. Next Generation Forum Köln, Oktober Daniel Arias Medina
 Robust Positioning Provision of Safe Navigation at Sea Next Generation Forum Köln, 26.-27. Oktober 2016 Daniel Arias Medina Department of Nautical Systems Institute of Communication and Navigation DLR.de
Robust Positioning Provision of Safe Navigation at Sea Next Generation Forum Köln, 26.-27. Oktober 2016 Daniel Arias Medina Department of Nautical Systems Institute of Communication and Navigation DLR.de
Satellite and Inertial Attitude. A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu
 Satellite and Inertial Attitude and Positioning System A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu Outline Project Introduction Theoretical Background Inertial
Satellite and Inertial Attitude and Positioning System A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu Outline Project Introduction Theoretical Background Inertial
INTRODUCTION TO VEHICLE NAVIGATION SYSTEM LECTURE 5.1 SGU 4823 SATELLITE NAVIGATION
 INTRODUCTION TO VEHICLE NAVIGATION SYSTEM LECTURE 5.1 SGU 4823 SATELLITE NAVIGATION AzmiHassan SGU4823 SatNav 2012 1 Navigation Systems Navigation ( Localisation ) may be defined as the process of determining
INTRODUCTION TO VEHICLE NAVIGATION SYSTEM LECTURE 5.1 SGU 4823 SATELLITE NAVIGATION AzmiHassan SGU4823 SatNav 2012 1 Navigation Systems Navigation ( Localisation ) may be defined as the process of determining
Integrated Navigation System
 Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
PNT-data generation as basis for guidance systems in inland water traffic
 PNT-data generation as basis for guidance systems in inland water traffic P. Zachhuber 1, I.D. Herrera Pinzón 1, A. Born 1, M. Hoppe 2, L. Burmisova 2, A. Heßelbarth 3, J. Zimmermann 3, A. Heidrich 4,
PNT-data generation as basis for guidance systems in inland water traffic P. Zachhuber 1, I.D. Herrera Pinzón 1, A. Born 1, M. Hoppe 2, L. Burmisova 2, A. Heßelbarth 3, J. Zimmermann 3, A. Heidrich 4,
Reliability Estimation for RTK-GNSS/IMU/Vehicle Speed Sensors in Urban Environment
 Laboratory of Satellite Navigation Engineering Reliability Estimation for RTK-GNSS/IMU/Vehicle Speed Sensors in Urban Environment Ren Kikuchi, Nobuaki Kubo (TUMSAT) Shigeki Kawai, Ichiro Kato, Nobuyuki
Laboratory of Satellite Navigation Engineering Reliability Estimation for RTK-GNSS/IMU/Vehicle Speed Sensors in Urban Environment Ren Kikuchi, Nobuaki Kubo (TUMSAT) Shigeki Kawai, Ichiro Kato, Nobuyuki
Assessing & Mitigation of risks on railways operational scenarios
 R H I N O S Railway High Integrity Navigation Overlay System Assessing & Mitigation of risks on railways operational scenarios Rome, June 22 nd 2017 Anja Grosch, Ilaria Martini, Omar Garcia Crespillo (DLR)
R H I N O S Railway High Integrity Navigation Overlay System Assessing & Mitigation of risks on railways operational scenarios Rome, June 22 nd 2017 Anja Grosch, Ilaria Martini, Omar Garcia Crespillo (DLR)
Integration of GNSS and INS
 Integration of GNSS and INS Kiril Alexiev 1/39 To limit the drift, an INS is usually aided by other sensors that provide direct measurements of the integrated quantities. Examples of aiding sensors: Aided
Integration of GNSS and INS Kiril Alexiev 1/39 To limit the drift, an INS is usually aided by other sensors that provide direct measurements of the integrated quantities. Examples of aiding sensors: Aided
On fault detection and exclusion in snapshot and recursive positioning algorithms for maritime applications
 Eur. Transp. Res. Rev. (217) 9: 1 DOI 1.17/s12544-16-217-5 ORIGINAL PAPER On fault detection and exclusion in snapshot and recursive positioning algorithms for maritime applications Ralf Ziebold 1 Luis
Eur. Transp. Res. Rev. (217) 9: 1 DOI 1.17/s12544-16-217-5 ORIGINAL PAPER On fault detection and exclusion in snapshot and recursive positioning algorithms for maritime applications Ralf Ziebold 1 Luis
Sensor Fusion for Navigation in Degraded Environements
 Sensor Fusion for Navigation in Degraded Environements David M. Bevly Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 GPS and Vehicle Dynamics Lab Auburn University
Sensor Fusion for Navigation in Degraded Environements David M. Bevly Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 GPS and Vehicle Dynamics Lab Auburn University
A new Modular and Open Concept for the Maritime Integrated PNT System
 A new Modular and Open Concept for the Maritime Integrated PNT System T. Noack German Aerospace Center Institute of Communications and Navigation www.dlr.de Chart 2 MTS-2012 Maritime Integrated PNT Unit
A new Modular and Open Concept for the Maritime Integrated PNT System T. Noack German Aerospace Center Institute of Communications and Navigation www.dlr.de Chart 2 MTS-2012 Maritime Integrated PNT Unit
Report on Extended Kalman Filter Simulation Experiments
 Report on Extended Kalman Filter Simulation Experiments Aeronautical Engineering 551 Integrated Navigation and Guidance Systems Chad R. Frost December 6, 1997 Introduction This report describes my experiments
Report on Extended Kalman Filter Simulation Experiments Aeronautical Engineering 551 Integrated Navigation and Guidance Systems Chad R. Frost December 6, 1997 Introduction This report describes my experiments
Resilient PNT: From PNT-Unit concept to first realization
 www.dlr.de Chart 1 >Resilient PNT: From PNT Unit concept to first realization> R. Ziebold > e-navigation Underway 1/3/213 Resilient PNT: From PNT-Unit concept to first realization Ralf Ziebold, Z. Dai,
www.dlr.de Chart 1 >Resilient PNT: From PNT Unit concept to first realization> R. Ziebold > e-navigation Underway 1/3/213 Resilient PNT: From PNT-Unit concept to first realization Ralf Ziebold, Z. Dai,
Particle. Kalman filter. Graphbased. filter. Kalman. Particle. filter. filter. Three Main SLAM Paradigms. Robot Mapping
 Robot Mapping Three Main SLAM Paradigms Summary on the Kalman Filter & Friends: KF, EKF, UKF, EIF, SEIF Kalman Particle Graphbased Cyrill Stachniss 1 2 Kalman Filter & Its Friends Kalman Filter Algorithm
Robot Mapping Three Main SLAM Paradigms Summary on the Kalman Filter & Friends: KF, EKF, UKF, EIF, SEIF Kalman Particle Graphbased Cyrill Stachniss 1 2 Kalman Filter & Its Friends Kalman Filter Algorithm
Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity
 Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity Zak M. Kassas Autonomous Systems Perception, Intelligence, and Navigation (ASPIN) Laboratory University of California, Riverside
Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity Zak M. Kassas Autonomous Systems Perception, Intelligence, and Navigation (ASPIN) Laboratory University of California, Riverside
Securing Wireless Localization: Living with Bad Guys. Zang Li, Yanyong Zhang, Wade Trappe Badri Nath
 Securing Wireless Localization: Living with Bad Guys Zang Li, Yanyong Zhang, Wade Trappe Badri Nath Talk Overview Wireless Localization Background Attacks on Wireless Localization Time of Flight Signal
Securing Wireless Localization: Living with Bad Guys Zang Li, Yanyong Zhang, Wade Trappe Badri Nath Talk Overview Wireless Localization Background Attacks on Wireless Localization Time of Flight Signal
Intelligent Transport Systems and GNSS. ITSNT 2017 ENAC, Toulouse, France 11/ Nobuaki Kubo (TUMSAT)
") Intelligent Transport Systems and GNSS ITSNT 2017 ENAC, Toulouse, France 11/14-17 2017 Nobuaki Kubo (TUMSAT) Contents ITS applications in Japan How can GNSS contribute to ITS? Current performance of GNSS
Intelligent Transport Systems and GNSS ITSNT 2017 ENAC, Toulouse, France 11/14-17 2017 Nobuaki Kubo (TUMSAT) Contents ITS applications in Japan How can GNSS contribute to ITS? Current performance of GNSS
Frank Heymann 1.
 Plausibility analysis of navigation related AIS parameter based on time series Frank Heymann 1 1 Deutsches Zentrum für Luft und Raumfahrt ev, Neustrelitz, Germany email: frank.heymann@dlr.de In this paper
Plausibility analysis of navigation related AIS parameter based on time series Frank Heymann 1 1 Deutsches Zentrum für Luft und Raumfahrt ev, Neustrelitz, Germany email: frank.heymann@dlr.de In this paper
Webinar. 9 things you should know about centimeter-level GNSS accuracy
 Webinar 9 things you should know about centimeter-level GNSS accuracy Webinar agenda 9 things you should know about centimeter-level GNSS accuracy 1. High precision GNSS challenges 2. u-blox F9 technology
Webinar 9 things you should know about centimeter-level GNSS accuracy Webinar agenda 9 things you should know about centimeter-level GNSS accuracy 1. High precision GNSS challenges 2. u-blox F9 technology
A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology
 A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology Tatyana Bourke, Applanix Corporation Abstract This paper describes a post-processing software package that
A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology Tatyana Bourke, Applanix Corporation Abstract This paper describes a post-processing software package that
TECHNOLOGY DEVELOPMENT AREAS IN AAWA
 TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
KALMAN FILTER APPLICATIONS
 ECE555: Applied Kalman Filtering 1 1 KALMAN FILTER APPLICATIONS 1.1: Examples of Kalman filters To wrap up the course, we look at several of the applications introduced in notes chapter 1, but in more
ECE555: Applied Kalman Filtering 1 1 KALMAN FILTER APPLICATIONS 1.1: Examples of Kalman filters To wrap up the course, we look at several of the applications introduced in notes chapter 1, but in more
Data fusion for traffic flow estimation at intersections
 Data fusion for traffic flow estimation at intersections Axel WOLFERMANN Masao KUWAHARA Babak MEHRAN German Aerospace Center (DLR e. V.) Tohoku University Germany Japan Canada Outline Part I Motivation
Data fusion for traffic flow estimation at intersections Axel WOLFERMANN Masao KUWAHARA Babak MEHRAN German Aerospace Center (DLR e. V.) Tohoku University Germany Japan Canada Outline Part I Motivation
Advanced Navigation Solutions - ANAVS Company presentation
 Advanced Navigation Solutions - ANAVS Company presentation April 2014 Table of contents 1. Advanced Navigation Solutions - ANAVS 2. PAD System hardware 3. PAD System software 4. Applications 5. Patents
Advanced Navigation Solutions - ANAVS Company presentation April 2014 Table of contents 1. Advanced Navigation Solutions - ANAVS 2. PAD System hardware 3. PAD System software 4. Applications 5. Patents
Improved GPS Carrier Phase Tracking in Difficult Environments Using Vector Tracking Approach
 Improved GPS Carrier Phase Tracking in Difficult Environments Using Vector Tracking Approach Scott M. Martin David M. Bevly Auburn University GPS and Vehicle Dynamics Laboratory Presentation Overview Introduction
Improved GPS Carrier Phase Tracking in Difficult Environments Using Vector Tracking Approach Scott M. Martin David M. Bevly Auburn University GPS and Vehicle Dynamics Laboratory Presentation Overview Introduction
TECHNICAL PAPER: Performance Analysis of Next-Generation GNSS/INS System from KVH and NovAtel
 TECHNICAL PAPER: Performance Analysis of Next-Generation GNSS/INS System from KVH and NovAtel KVH Industries, Inc. 50 Enterprise Center Middletown, RI 02842 USA KVH Contact Information Phone: +1 401-847-3327
TECHNICAL PAPER: Performance Analysis of Next-Generation GNSS/INS System from KVH and NovAtel KVH Industries, Inc. 50 Enterprise Center Middletown, RI 02842 USA KVH Contact Information Phone: +1 401-847-3327
PHINS, An All-In-One Sensor for DP Applications
 DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
Implementation and Performance Evaluation of a Fast Relocation Method in a GPS/SINS/CSAC Integrated Navigation System Hardware Prototype
 This article has been accepted and published on J-STAGE in advance of copyediting. Content is final as presented. Implementation and Performance Evaluation of a Fast Relocation Method in a GPS/SINS/CSAC
This article has been accepted and published on J-STAGE in advance of copyediting. Content is final as presented. Implementation and Performance Evaluation of a Fast Relocation Method in a GPS/SINS/CSAC
Vector tracking loops are a type
 GNSS Solutions: What are vector tracking loops, and what are their benefits and drawbacks? GNSS Solutions is a regular column featuring questions and answers about technical aspects of GNSS. Readers are
GNSS Solutions: What are vector tracking loops, and what are their benefits and drawbacks? GNSS Solutions is a regular column featuring questions and answers about technical aspects of GNSS. Readers are
NovAtel s. Performance Analysis October Abstract. SPAN on OEM6. SPAN on OEM6. Enhancements
 NovAtel s SPAN on OEM6 Performance Analysis October 2012 Abstract SPAN, NovAtel s GNSS/INS solution, is now available on the OEM6 receiver platform. In addition to rapid GNSS signal reacquisition performance,
NovAtel s SPAN on OEM6 Performance Analysis October 2012 Abstract SPAN, NovAtel s GNSS/INS solution, is now available on the OEM6 receiver platform. In addition to rapid GNSS signal reacquisition performance,
Plausibility analysis of navigation related AIS parameter based on time series
 Plausibility analysis of navigation related AIS parameter based on time series Frank Heymann, Thoralf Noack, Paweł Banyś Deutsches Zentrum für Luft und Raumfahrt ev, Neustrelitz, Germany email: frank.heymann@dlr.de
Plausibility analysis of navigation related AIS parameter based on time series Frank Heymann, Thoralf Noack, Paweł Banyś Deutsches Zentrum für Luft und Raumfahrt ev, Neustrelitz, Germany email: frank.heymann@dlr.de
Long Term Validation of High Precision RTK Positioning Onboard a Ferry Vessel Using the MGBAS in the Research Port of Rostock
 http://www.transnav.eu the International Journal on Marine Navigation and Safety of Sea Transportation Volume 11 Number 3 September 2017 DOI: 10.12716/1001.11.03.06 Long Term Validation of High Precision
http://www.transnav.eu the International Journal on Marine Navigation and Safety of Sea Transportation Volume 11 Number 3 September 2017 DOI: 10.12716/1001.11.03.06 Long Term Validation of High Precision
Robust Positioning for Urban Traffic
 Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
It is well known that GNSS signals
 GNSS Solutions: Multipath vs. NLOS signals GNSS Solutions is a regular column featuring questions and answers about technical aspects of GNSS. Readers are invited to send their questions to the columnist,
GNSS Solutions: Multipath vs. NLOS signals GNSS Solutions is a regular column featuring questions and answers about technical aspects of GNSS. Readers are invited to send their questions to the columnist,
Sensing and Perception: Localization and positioning. by Isaac Skog
 Sensing and Perception: Localization and positioning by Isaac Skog Outline Basic information sources and performance measurements. Motion and positioning sensors. Positioning and motion tracking technologies.
Sensing and Perception: Localization and positioning by Isaac Skog Outline Basic information sources and performance measurements. Motion and positioning sensors. Positioning and motion tracking technologies.
FILTERING THE RESULTS OF ZIGBEE DISTANCE MEASUREMENTS WITH RANSAC ALGORITHM
 Acta Geodyn. Geomater., Vol. 13, No. 1 (181), 83 88, 2016 DOI: 10.13168/AGG.2015.0043 journal homepage: http://www.irsm.cas.cz/acta ORIGINAL PAPER FILTERING THE RESULTS OF ZIGBEE DISTANCE MEASUREMENTS
Acta Geodyn. Geomater., Vol. 13, No. 1 (181), 83 88, 2016 DOI: 10.13168/AGG.2015.0043 journal homepage: http://www.irsm.cas.cz/acta ORIGINAL PAPER FILTERING THE RESULTS OF ZIGBEE DISTANCE MEASUREMENTS
Inertial Navigation System
 Apogee Marine Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Navigation, Motion & Heave Sensing APOGEE SERIES makes high accuracy affordable for all surveying
Apogee Marine Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Navigation, Motion & Heave Sensing APOGEE SERIES makes high accuracy affordable for all surveying
Measurement Level Integration of Multiple Low-Cost GPS Receivers for UAVs
 Measurement Level Integration of Multiple Low-Cost GPS Receivers for UAVs Akshay Shetty and Grace Xingxin Gao University of Illinois at Urbana-Champaign BIOGRAPHY Akshay Shetty is a graduate student in
Measurement Level Integration of Multiple Low-Cost GPS Receivers for UAVs Akshay Shetty and Grace Xingxin Gao University of Illinois at Urbana-Champaign BIOGRAPHY Akshay Shetty is a graduate student in
IMPROVING THE MARITIME TRAFFIC SITUATION ASSESSMENT FOR A SINGLE TARGET IN A MULTISENSOR ENVIRONMENT. Gregor Siegert, Paweł Banyś and Frank Heymann
 IMPROVING THE MARITIME TRAFFIC SITUATION ASSESSMENT FOR A SINGLE TARGET IN A MULTISENSOR ENVIRONMENT Gregor Siegert, Paweł Banyś and Frank Heymann Department of Nautical Systems German Aerospace Center
IMPROVING THE MARITIME TRAFFIC SITUATION ASSESSMENT FOR A SINGLE TARGET IN A MULTISENSOR ENVIRONMENT Gregor Siegert, Paweł Banyś and Frank Heymann Department of Nautical Systems German Aerospace Center
Robot Mapping. Summary on the Kalman Filter & Friends: KF, EKF, UKF, EIF, SEIF. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping Summary on the Kalman Filter & Friends: KF, EKF, UKF, EIF, SEIF Gian Diego Tipaldi, Wolfram Burgard 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased 2 Kalman Filter &
Robot Mapping Summary on the Kalman Filter & Friends: KF, EKF, UKF, EIF, SEIF Gian Diego Tipaldi, Wolfram Burgard 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased 2 Kalman Filter &
Loosely Coupled GPS/INS Integration With Snap To Road For Low-Cost Land Vehicle Navigation
 Loosely Coupled GPS/INS Integration With Snap To Road For Low-Cost Land Vehicle Navigation EKF- for low-cost applications Mohamed Lajmi Cherif University of Québec, École de Technologie Supérieure, Montréal.
Loosely Coupled GPS/INS Integration With Snap To Road For Low-Cost Land Vehicle Navigation EKF- for low-cost applications Mohamed Lajmi Cherif University of Québec, École de Technologie Supérieure, Montréal.
Experiment on signal filter combinations for the analysis of information from inertial measurement units in AOCS
 Journal of Physics: Conference Series PAPER OPEN ACCESS Experiment on signal filter combinations for the analysis of information from inertial measurement units in AOCS To cite this article: Maurício N
Journal of Physics: Conference Series PAPER OPEN ACCESS Experiment on signal filter combinations for the analysis of information from inertial measurement units in AOCS To cite this article: Maurício N
ADVANCED GNSS ALGORITHMS FOR SAFE AUTONOMOUS VEHICLES
 ION GNSS+ 2017 ADVANCED GNSS ALGORITHMS FOR SAFE AUTONOMOUS VEHICLES SEPTEMBER 29 TH, 2017 ION GNSS+ 2017, PORTLAND, OREGON, USA SESSION A5: Autonomous and Assisted Vehicle Applications Property of GMV
ION GNSS+ 2017 ADVANCED GNSS ALGORITHMS FOR SAFE AUTONOMOUS VEHICLES SEPTEMBER 29 TH, 2017 ION GNSS+ 2017, PORTLAND, OREGON, USA SESSION A5: Autonomous and Assisted Vehicle Applications Property of GMV
High Integrity GNSS Receiver for Ground Based Mobile Applications
 High Integrity GNSS Receiver for Ground Based Mobile Applications M. Raimondi, G. Carrié, C. Berland, D. Serant, Thales Alenia Space, Toulouse, France T. Junique, F. Barbiero, CNES, Toulouse, France N.
High Integrity GNSS Receiver for Ground Based Mobile Applications M. Raimondi, G. Carrié, C. Berland, D. Serant, Thales Alenia Space, Toulouse, France T. Junique, F. Barbiero, CNES, Toulouse, France N.
GPS data correction using encoders and INS sensors
 GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
Trustworthy Positioning for Next Generation Intelligent Transport Systems Ahmed El-Mowafy
 Trustworthy Positioning for Next Generation Intelligent Transport Systems Ahmed El-Mowafy Contents Background on ITS and C-ITS Requirements Challenges RAIM Test and Results Utilisation Workshop, Sydney,
Trustworthy Positioning for Next Generation Intelligent Transport Systems Ahmed El-Mowafy Contents Background on ITS and C-ITS Requirements Challenges RAIM Test and Results Utilisation Workshop, Sydney,
Extended Kalman Filtering
 Extended Kalman Filtering Andre Cornman, Darren Mei Stanford EE 267, Virtual Reality, Course Report, Instructors: Gordon Wetzstein and Robert Konrad Abstract When working with virtual reality, one of the
Extended Kalman Filtering Andre Cornman, Darren Mei Stanford EE 267, Virtual Reality, Course Report, Instructors: Gordon Wetzstein and Robert Konrad Abstract When working with virtual reality, one of the
GPS-Aided INS Datasheet Rev. 2.6
 GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
Pedestrian Navigation System Using. Shoe-mounted INS. By Yan Li. A thesis submitted for the degree of Master of Engineering (Research)
") Pedestrian Navigation System Using Shoe-mounted INS By Yan Li A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information Technology University of Technology,
Pedestrian Navigation System Using Shoe-mounted INS By Yan Li A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information Technology University of Technology,
3DM-GX3-45 Theory of Operation
 Theory of Operation 8500-0016 Revision 001 3DM-GX3-45 Theory of Operation www.microstrain.com Little Sensors, Big Ideas 2012 by MicroStrain, Inc. 459 Hurricane Lane Williston, VT 05495 United States of
Theory of Operation 8500-0016 Revision 001 3DM-GX3-45 Theory of Operation www.microstrain.com Little Sensors, Big Ideas 2012 by MicroStrain, Inc. 459 Hurricane Lane Williston, VT 05495 United States of
Inertial Navigation System
 Apogee Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Motion Sensing & Georeferencing APOGEE SERIES makes high accuracy affordable for all surveying companies.
Apogee Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Motion Sensing & Georeferencing APOGEE SERIES makes high accuracy affordable for all surveying companies.
Author s Name Name of the Paper Session. DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION. Sensing Autonomy.
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION Sensing Autonomy By Arne Rinnan Kongsberg Seatex AS Abstract A certain level of autonomy is already
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION Sensing Autonomy By Arne Rinnan Kongsberg Seatex AS Abstract A certain level of autonomy is already
Cooperative navigation (part II)
") Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Utility of Sensor Fusion of GPS and Motion Sensor in Android Devices In GPS- Deprived Environment
 Utility of Sensor Fusion of GPS and Motion Sensor in Android Devices In GPS- Deprived Environment Amrit Karmacharya1 1 Land Management Training Center Bakhundol, Dhulikhel, Kavre, Nepal Tel:- +977-9841285489
Utility of Sensor Fusion of GPS and Motion Sensor in Android Devices In GPS- Deprived Environment Amrit Karmacharya1 1 Land Management Training Center Bakhundol, Dhulikhel, Kavre, Nepal Tel:- +977-9841285489
A Method for IMU/GNSS/Doppler Velocity Log Integration in Marine Applications
 A Method for IMU/GNSS/Doppler Velocity Log Integration in Marine Applications Michailas Romanovas Ralf Ziebold Luís Lança Institute of Communications and Navigation German Aerospace Centre DLR Neustrelitz
A Method for IMU/GNSS/Doppler Velocity Log Integration in Marine Applications Michailas Romanovas Ralf Ziebold Luís Lança Institute of Communications and Navigation German Aerospace Centre DLR Neustrelitz
Name: Chengming Jin Supervisor: Allison Kealy. GNSS-based Positioning Scheme & Application in Safety-critical Systems of Rail Transport
 Name: Chengming Jin Supervisor: Allison Kealy GNSS-based Positioning Scheme & Application in Safety-critical Systems of Rail Transport CONTENT 1 Introduction 2 Challenges 3 Solutions Introduction How Modern
Name: Chengming Jin Supervisor: Allison Kealy GNSS-based Positioning Scheme & Application in Safety-critical Systems of Rail Transport CONTENT 1 Introduction 2 Challenges 3 Solutions Introduction How Modern
SPAN Technology System Characteristics and Performance
 SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
GPS TEC Measurements Utilized for Monitoring Recent Space Weather Events and Effects in Europe
 GPS TEC Measurements Utilized for Monitoring Recent Space Weather Events and Effects in Europe S. M. Stankov (1), N. Jakowski (2), B. Huck (3) (1) German Aerospace Center (DLR) Institute of Communications
GPS TEC Measurements Utilized for Monitoring Recent Space Weather Events and Effects in Europe S. M. Stankov (1), N. Jakowski (2), B. Huck (3) (1) German Aerospace Center (DLR) Institute of Communications
How to introduce LORD Sensing s newest inertial sensors into your application
 LORD TECHNICAL NOTE Migrating from the 3DM-GX4 to the 3DM-GX5 How to introduce LORD Sensing s newest inertial sensors into your application Introduction The 3DM-GX5 is the latest generation of the very
LORD TECHNICAL NOTE Migrating from the 3DM-GX4 to the 3DM-GX5 How to introduce LORD Sensing s newest inertial sensors into your application Introduction The 3DM-GX5 is the latest generation of the very
LOCALIZATION WITH GPS UNAVAILABLE
 LOCALIZATION WITH GPS UNAVAILABLE ARES SWIEE MEETING - ROME, SEPT. 26 2014 TOR VERGATA UNIVERSITY Summary Introduction Technology State of art Application Scenarios vs. Technology Advanced Research in
LOCALIZATION WITH GPS UNAVAILABLE ARES SWIEE MEETING - ROME, SEPT. 26 2014 TOR VERGATA UNIVERSITY Summary Introduction Technology State of art Application Scenarios vs. Technology Advanced Research in
Autonomous Underwater Vehicle Navigation.
 Autonomous Underwater Vehicle Navigation. We are aware that electromagnetic energy cannot propagate appreciable distances in the ocean except at very low frequencies. As a result, GPS-based and other such
Autonomous Underwater Vehicle Navigation. We are aware that electromagnetic energy cannot propagate appreciable distances in the ocean except at very low frequencies. As a result, GPS-based and other such
GNSS in Maritime and Education in Egypt
 GNSS in Maritime and Education in Egypt GNSS IN MARITIME PORTS SHIPS PORTS WATERWAYS GNSS maritime applications will help to improve: navigation. Ship operations. Traffic management. Seaport operations.
GNSS in Maritime and Education in Egypt GNSS IN MARITIME PORTS SHIPS PORTS WATERWAYS GNSS maritime applications will help to improve: navigation. Ship operations. Traffic management. Seaport operations.
State observers based on detailed multibody models applied to an automobile
 State observers based on detailed multibody models applied to an automobile Emilio Sanjurjo, Advisors: Miguel Ángel Naya Villaverde Javier Cuadrado Aranda Outline Introduction Multibody Dynamics Kalman
State observers based on detailed multibody models applied to an automobile Emilio Sanjurjo, Advisors: Miguel Ángel Naya Villaverde Javier Cuadrado Aranda Outline Introduction Multibody Dynamics Kalman
Cooperative localization (part I) Jouni Rantakokko
 Jouni Rantakokko") Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
GPS-Aided INS Datasheet Rev. 2.7
 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
Sensor Data Fusion Using Kalman Filter
 Sensor Data Fusion Using Kalman Filter J.Z. Sasiade and P. Hartana Department of Mechanical & Aerospace Engineering arleton University 115 olonel By Drive Ottawa, Ontario, K1S 5B6, anada e-mail: jsas@ccs.carleton.ca
Sensor Data Fusion Using Kalman Filter J.Z. Sasiade and P. Hartana Department of Mechanical & Aerospace Engineering arleton University 115 olonel By Drive Ottawa, Ontario, K1S 5B6, anada e-mail: jsas@ccs.carleton.ca
Level I Signal Modeling and Adaptive Spectral Analysis
 Level I Signal Modeling and Adaptive Spectral Analysis 1 Learning Objectives Students will learn about autoregressive signal modeling as a means to represent a stochastic signal. This differs from using
Level I Signal Modeling and Adaptive Spectral Analysis 1 Learning Objectives Students will learn about autoregressive signal modeling as a means to represent a stochastic signal. This differs from using
Filtering Impulses in Dynamic Noise in the Presence of Large Measurement Noise
 Clemson University TigerPrints All Dissertations Dissertations 12-215 Filtering Impulses in Dynamic Noise in the Presence of Large Measurement Noise Jungphil Kwon Clemson University Follow this and additional
Clemson University TigerPrints All Dissertations Dissertations 12-215 Filtering Impulses in Dynamic Noise in the Presence of Large Measurement Noise Jungphil Kwon Clemson University Follow this and additional
EE 570: Location and Navigation
 EE 570: Location and Navigation INS/GPS Integration Aly El-Osery 1 Stephen Bruder 2 1 Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA 2 Electrical and Computer Engineering Department,
EE 570: Location and Navigation INS/GPS Integration Aly El-Osery 1 Stephen Bruder 2 1 Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA 2 Electrical and Computer Engineering Department,
Outlier-Robust Estimation of GPS Satellite Clock Offsets
 Outlier-Robust Estimation of GPS Satellite Clock Offsets Simo Martikainen, Robert Piche and Simo Ali-Löytty Tampere University of Technology. Tampere, Finland Email: simo.martikainen@tut.fi Abstract A
Outlier-Robust Estimation of GPS Satellite Clock Offsets Simo Martikainen, Robert Piche and Simo Ali-Löytty Tampere University of Technology. Tampere, Finland Email: simo.martikainen@tut.fi Abstract A
GPS-Aided INS Datasheet Rev. 2.3
 GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
Report 3. Kalman or Wiener Filters
 1 Embedded Systems WS 2014/15 Report 3: Kalman or Wiener Filters Stefan Feilmeier Facultatea de Inginerie Hermann Oberth Master-Program Embedded Systems Advanced Digital Signal Processing Methods Winter
1 Embedded Systems WS 2014/15 Report 3: Kalman or Wiener Filters Stefan Feilmeier Facultatea de Inginerie Hermann Oberth Master-Program Embedded Systems Advanced Digital Signal Processing Methods Winter
Performance Analysis of GPS Integer Ambiguity Resolution Using External Aiding Information
 Journal of Global Positioning Systems (2005) Vol. 4, No. 1-2: 201-206 Performance Analysis of GPS Integer Ambiguity Resolution Using External Aiding Information Sebum Chun, Chulbum Kwon, Eunsung Lee, Young
Journal of Global Positioning Systems (2005) Vol. 4, No. 1-2: 201-206 Performance Analysis of GPS Integer Ambiguity Resolution Using External Aiding Information Sebum Chun, Chulbum Kwon, Eunsung Lee, Young
Satellite Navigation Integrity and integer ambiguity resolution
 Satellite Navigation Integrity and integer ambiguity resolution Picture: ESA AE4E08 Sandra Verhagen Course 2010 2011, lecture 12 1 Today s topics Integrity and RAIM Integer Ambiguity Resolution Study Section
Satellite Navigation Integrity and integer ambiguity resolution Picture: ESA AE4E08 Sandra Verhagen Course 2010 2011, lecture 12 1 Today s topics Integrity and RAIM Integer Ambiguity Resolution Study Section
Multi-Receiver Vector Tracking
 Multi-Receiver Vector Tracking Yuting Ng and Grace Xingxin Gao please feel free to view the.pptx version for the speaker notes Cutting-Edge Applications UAV formation flight remote sensing interference
Multi-Receiver Vector Tracking Yuting Ng and Grace Xingxin Gao please feel free to view the.pptx version for the speaker notes Cutting-Edge Applications UAV formation flight remote sensing interference
MARKSMAN DP-INS DYNAMIC POSITIONING INERTIAL REFERENCE SYSTEM
 cc MARKSMAN DP-INS DYNAMIC POSITIONING INERTIAL REFERENCE SYSTEM Sonardyne s Marksman DP-INS is an advanced navigation-based Position Measuring Equipment (PME) source for dynamically positioned (DP) rigs.
cc MARKSMAN DP-INS DYNAMIC POSITIONING INERTIAL REFERENCE SYSTEM Sonardyne s Marksman DP-INS is an advanced navigation-based Position Measuring Equipment (PME) source for dynamically positioned (DP) rigs.
GPS-Aided INS Datasheet Rev. 3.0
 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
AIR FORCE INSTITUTE OF TECHNOLOGY
 Air-to-Air Missile Enhanced Scoring with Kalman Smoothing THESIS Jonathon Gipson, Captain, USAF AFIT/GE/ENG/12-18 DEPARTMENT OF THE AIR FORCE AIR UNIVERSITY AIR FORCE INSTITUTE OF TECHNOLOGY Wright-Patterson
Air-to-Air Missile Enhanced Scoring with Kalman Smoothing THESIS Jonathon Gipson, Captain, USAF AFIT/GE/ENG/12-18 DEPARTMENT OF THE AIR FORCE AIR UNIVERSITY AIR FORCE INSTITUTE OF TECHNOLOGY Wright-Patterson
Simulation of GPS-based Launch Vehicle Trajectory Estimation using UNSW Kea GPS Receiver
 Simulation of GPS-based Launch Vehicle Trajectory Estimation using UNSW Kea GPS Receiver Sanat Biswas Australian Centre for Space Engineering Research, UNSW Australia, s.biswas@unsw.edu.au Li Qiao School
Simulation of GPS-based Launch Vehicle Trajectory Estimation using UNSW Kea GPS Receiver Sanat Biswas Australian Centre for Space Engineering Research, UNSW Australia, s.biswas@unsw.edu.au Li Qiao School
and Vehicle Sensors in Urban Environment
 AvailabilityImprovement ofrtk GPS GPSwithIMU and Vehicle Sensors in Urban Environment ION GPS/GNSS 2012 Tk Tokyo University it of Marine Si Science and Technology Nobuaki Kubo, Chen Dihan 1 Contents Background
AvailabilityImprovement ofrtk GPS GPSwithIMU and Vehicle Sensors in Urban Environment ION GPS/GNSS 2012 Tk Tokyo University it of Marine Si Science and Technology Nobuaki Kubo, Chen Dihan 1 Contents Background
Assessing the likelihood of GNSS spoofing attacks on RPAS
 Assessing the likelihood of GNSS spoofing attacks on RPAS Mike Maarse UvA/NLR 30-06-2016 Mike Maarse (UvA/NLR) RP2 Presentation 30-06-2016 1 / 25 Introduction Motivation/relevance Growing number of RPAS
Assessing the likelihood of GNSS spoofing attacks on RPAS Mike Maarse UvA/NLR 30-06-2016 Mike Maarse (UvA/NLR) RP2 Presentation 30-06-2016 1 / 25 Introduction Motivation/relevance Growing number of RPAS
Fast Multi Fault Detection & Exclusion Approach for GNSS Integrity Monitoring
 62820 Fast Multi Fault Detection & Exclusion Approach for GNSS Integrity Monitoring Nourdine Aït Tmazirte, Maan E. El Najjar, Joelle Al Hage, Cherif Smaili and Denis Pomorski Abstract Integrity monitoring
62820 Fast Multi Fault Detection & Exclusion Approach for GNSS Integrity Monitoring Nourdine Aït Tmazirte, Maan E. El Najjar, Joelle Al Hage, Cherif Smaili and Denis Pomorski Abstract Integrity monitoring
Precise Positioning with Smartphones running Android 7 or later
 Precise Positioning with Smartphones running Android 7 or later * René Warnant, * Cécile Deprez, + Quentin Warnant * University of Liege Geodesy and GNSS + Augmenteo, Plaine Image, Lille (France) Belgian
Precise Positioning with Smartphones running Android 7 or later * René Warnant, * Cécile Deprez, + Quentin Warnant * University of Liege Geodesy and GNSS + Augmenteo, Plaine Image, Lille (France) Belgian
Systematical Methods to Counter Drones in Controlled Manners
 Systematical Methods to Counter Drones in Controlled Manners Wenxin Chen, Garrett Johnson, Yingfei Dong Dept. of Electrical Engineering University of Hawaii 1 System Models u Physical system y Controller
Systematical Methods to Counter Drones in Controlled Manners Wenxin Chen, Garrett Johnson, Yingfei Dong Dept. of Electrical Engineering University of Hawaii 1 System Models u Physical system y Controller
A LASER RANGE-FINDER SCANNER SYSTEM FOR PRECISE MANEOUVER AND OBSTACLE AVOIDANCE IN MARITIME AND INLAND NAVIGATION
 A LASER RANGE-FINDER SCANNER SYSTEM FOR PRECISE MANEOUVER AND OBSTACLE AVOIDANCE IN MARITIME AND INLAND NAVIGATION A.R. Jiménez, R.Ceres and F. Seco Instituto de Automática Industrial - CSIC Ctra. Campo
A LASER RANGE-FINDER SCANNER SYSTEM FOR PRECISE MANEOUVER AND OBSTACLE AVOIDANCE IN MARITIME AND INLAND NAVIGATION A.R. Jiménez, R.Ceres and F. Seco Instituto de Automática Industrial - CSIC Ctra. Campo
ATLANS-C. mobile mapping position and orientation solution
 mobile mapping position and orientation solution mobile mapping position and orientation solution THE SMALLEST ATLANS-C is a high performance all-in-one position and orientation solution for both land
mobile mapping position and orientation solution mobile mapping position and orientation solution THE SMALLEST ATLANS-C is a high performance all-in-one position and orientation solution for both land
Carrier Phase GPS Augmentation Using Laser Scanners and Using Low Earth Orbiting Satellites
 Carrier Phase GPS Augmentation Using Laser Scanners and Using Low Earth Orbiting Satellites Colloquium on Satellite Navigation at TU München Mathieu Joerger December 15 th 2009 1 Navigation using Carrier
Carrier Phase GPS Augmentation Using Laser Scanners and Using Low Earth Orbiting Satellites Colloquium on Satellite Navigation at TU München Mathieu Joerger December 15 th 2009 1 Navigation using Carrier
GNSS NLOS and Multipath Error Mitigation using Advanced Multi-Constellation Consistency Checking with Height Aiding
 GNSS NLOS and Multipath Error Mitigation using Advanced Multi-Constellation Consistency Checking with Height Aiding Ziyi Jiang, Paul D Groves University College London, United Kingdom BIOGRAPHY All authors
GNSS NLOS and Multipath Error Mitigation using Advanced Multi-Constellation Consistency Checking with Height Aiding Ziyi Jiang, Paul D Groves University College London, United Kingdom BIOGRAPHY All authors
NEURAL NETWORK AIDED KALMAN FILTERING FOR INTEGRATED GPS/INS GEO-REFERENCING PLATFORM
 NEURAL NETWORK AIDED KALMAN FILTERING FOR INTEGRATED GS/INS GEO-REFERENCING LATFORM Jianguo Jack Wang a, *, Jinling Wang a, David Sinclair b, Leo Watts b a School of Surveying and Spatial Information Systems,
NEURAL NETWORK AIDED KALMAN FILTERING FOR INTEGRATED GS/INS GEO-REFERENCING LATFORM Jianguo Jack Wang a, *, Jinling Wang a, David Sinclair b, Leo Watts b a School of Surveying and Spatial Information Systems,
Office of Naval Research Naval Fire Support Program
 Office of Naval Research Naval Fire Support Program Assessment of Precision Guided Munition Terminal Accuracy Using Wide Area Differential GPS and Projected MEMS IMU Technology Ernie Ohlmeyer Tom Pepitone
Office of Naval Research Naval Fire Support Program Assessment of Precision Guided Munition Terminal Accuracy Using Wide Area Differential GPS and Projected MEMS IMU Technology Ernie Ohlmeyer Tom Pepitone
Computationally Efficient Unscented Kalman Filtering Techniques for Launch Vehicle Navigation using a Space-borne GPS Receiver
 Computationally Efficient Unscented Kalman Filtering Techniques for Launch Vehicle Navigation using a Space-borne GPS Receiver Sanat K. Biswas, ACSER, UNSW Australia Li Qiao, UNSW Australia Andrew G. Dempster,
Computationally Efficient Unscented Kalman Filtering Techniques for Launch Vehicle Navigation using a Space-borne GPS Receiver Sanat K. Biswas, ACSER, UNSW Australia Li Qiao, UNSW Australia Andrew G. Dempster,
AUTONOMOUS FAULT DETECTION ON A LOW COST GPS-AIDED ATTITUDE DETERMINATION SYSTEM. Arcélio C. Louro, Roberto V. F. Lopes and Hélio K.
 AUTONOMOUS FAULT DETECTION ON A LOW COST GPS-AIDED ATTITUDE DETERMINATION SYSTEM Arcélio C. Louro, Roberto V. F. Lopes and Hélio K. Kuga National Institute for Space Research - INPE Abstract This paper
AUTONOMOUS FAULT DETECTION ON A LOW COST GPS-AIDED ATTITUDE DETERMINATION SYSTEM Arcélio C. Louro, Roberto V. F. Lopes and Hélio K. Kuga National Institute for Space Research - INPE Abstract This paper
CODEVINTEC. Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems
 45 27 39.384 N 9 07 30.145 E Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems Aerospace Land/Automotive Marine Subsea Miniature inertial sensors 0.1 Ellipse Series New
45 27 39.384 N 9 07 30.145 E Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems Aerospace Land/Automotive Marine Subsea Miniature inertial sensors 0.1 Ellipse Series New
5G positioning and hybridization with GNSS observations
 5G positioning and hybridization with GNSS observations 1. Introduction Abstract The paradigm of ubiquitous location information has risen a requirement for hybrid positioning methods, as a continuous
5G positioning and hybridization with GNSS observations 1. Introduction Abstract The paradigm of ubiquitous location information has risen a requirement for hybrid positioning methods, as a continuous
Dynamic Angle Estimation
 Dynamic Angle Estimation with Inertial MEMS Analog Devices Bob Scannell Mark Looney Agenda Sensor to angle basics Accelerometer basics Accelerometer behaviors Gyroscope basics Gyroscope behaviors Key factors
Dynamic Angle Estimation with Inertial MEMS Analog Devices Bob Scannell Mark Looney Agenda Sensor to angle basics Accelerometer basics Accelerometer behaviors Gyroscope basics Gyroscope behaviors Key factors
Chapter 2 Distributed Consensus Estimation of Wireless Sensor Networks
 Chapter 2 Distributed Consensus Estimation of Wireless Sensor Networks Recently, consensus based distributed estimation has attracted considerable attention from various fields to estimate deterministic
Chapter 2 Distributed Consensus Estimation of Wireless Sensor Networks Recently, consensus based distributed estimation has attracted considerable attention from various fields to estimate deterministic
302 VIBROENGINEERING. JOURNAL OF VIBROENGINEERING. MARCH VOLUME 15, ISSUE 1. ISSN
 949. A distributed and low-order GPS/SINS algorithm of flight parameters estimation for unmanned vehicle Jiandong Guo, Pinqi Xia, Yanguo Song Jiandong Guo 1, Pinqi Xia 2, Yanguo Song 3 College of Aerospace
949. A distributed and low-order GPS/SINS algorithm of flight parameters estimation for unmanned vehicle Jiandong Guo, Pinqi Xia, Yanguo Song Jiandong Guo 1, Pinqi Xia 2, Yanguo Song 3 College of Aerospace
Advanced Methods to Identify Asphalt Pavement Delamination (R06D) Ground Penetrating Radar (GPR) Caltrans
 Ground Penetrating Radar (GPR) Caltrans") Advanced Methods to Identify Asphalt Pavement Delamination (R06D) Ground Penetrating Radar (GPR) Caltrans William Owen Peer Exchange August 1-3, 2018 Introduction How We Got Here Strategic Highway Research
Advanced Methods to Identify Asphalt Pavement Delamination (R06D) Ground Penetrating Radar (GPR) Caltrans William Owen Peer Exchange August 1-3, 2018 Introduction How We Got Here Strategic Highway Research
Vehicle Speed Estimation Using GPS/RISS (Reduced Inertial Sensor System)
") ISSC 2013, LYIT Letterkenny, June 20 21 Vehicle Speed Estimation Using GPS/RISS (Reduced Inertial Sensor System) Thomas O Kane and John V. Ringwood Department of Electronic Engineering National University
ISSC 2013, LYIT Letterkenny, June 20 21 Vehicle Speed Estimation Using GPS/RISS (Reduced Inertial Sensor System) Thomas O Kane and John V. Ringwood Department of Electronic Engineering National University
Motion & Navigation Solution
 Navsight Land & Air Solution Motion & Navigation Solution FOR SURVEYING APPLICATIONS Motion, Navigation, and Geo-referencing NAVSIGHT LAND/AIR SOLUTION is a full high performance inertial navigation solution
Navsight Land & Air Solution Motion & Navigation Solution FOR SURVEYING APPLICATIONS Motion, Navigation, and Geo-referencing NAVSIGHT LAND/AIR SOLUTION is a full high performance inertial navigation solution